Math/Phys 594: Homework 9 Solutions - Saad Qadeer
12
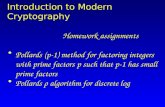
Math/Phys 594: Homework 9 Solutions March 27, 2019 7.1.3 Sketch the phase portrait for ˙ r = r(1 - r 2 )(4 - r 2 ), ˙ θ =2 - r 2 . We first set ˙ r = 0 to get r = 0, r = 1 and r = 2. Note that r = 1 gives ˙ θ = 1 while r =2 gives ˙ θ = -2. Moreover, letting f (r)= r(1 - r 2 )(4 - r 2 ), we have f 0 (r) = (1 - r 2 )(4 - r 2 ) - 2r 2 (5 - 2r 2 ) so that f 0 (0) > 0, f 0 (1) < 0 and f 0 (2) > 0. We conclude that the system has an unstable fixed point at the origin (a spiral in fact), a stable (counter-clockwise) limit cycle at r =1 and an unstable (clockwise) limit cycle r = 2. The resulting phase portrait is shown in Figure 1. Figure 1: Problem 7.1.3 7.1.4 Sketch the phase portrait for ˙ r = r sin(r), ˙ θ = 1. 1
Transcript of Math/Phys 594: Homework 9 Solutions - Saad Qadeer

Math/Phys 594: Homework 9 Solutions
March 27, 2019
7.1.3 Sketch the phase portrait for r = r(1− r2)(4− r2), θ = 2− r2.
We first set r = 0 to get r = 0, r = 1 and r = 2. Note that r = 1 gives θ = 1 while r = 2gives θ = −2. Moreover, letting f(r) = r(1− r2)(4− r2), we have
f ′(r) = (1− r2)(4− r2)− 2r2(5− 2r2)
so that f ′(0) > 0, f ′(1) < 0 and f ′(2) > 0. We conclude that the system has an unstablefixed point at the origin (a spiral in fact), a stable (counter-clockwise) limit cycle at r = 1and an unstable (clockwise) limit cycle r = 2. The resulting phase portrait is shown inFigure 1.
Figure 1: Problem 7.1.3
7.1.4 Sketch the phase portrait for r = r sin(r), θ = 1.
1

Setting r = 0 gives r sin(r) = 0⇒ r = kπ for all nonnegative integers k. Since θ = 1, wededuce that the system has a fixed point at the origin and counter-clockwise limit cycles atpoistive multiples of π. Letting f(r) = r sin(r) gives
f ′(r) = r cos(r) + sin(r)⇒ f ′(kπ) = kπ cos(kπ) + sin(kπ) = (−1)kkπ.
We conclude that the limit cycles at r = kπ are stable for odd k and unstable for even k.Since f(r) > 0 for 0 < r < π, it also follows that the fixed point at the origin is unstable.The corresponding phase portrait is shown in Figure 2.
Figure 2: Problem 7.1.4
7.1.8 (A circular limit cycle) Consider x+ ax(x2 + x2 − 1) + x = 0, where a > 0.
(a) Find and classify all the fixed points.
(b) Show that the system has a circular limit cycle, and find its amplitude and period.
(c) Determine the stability of the limit cycle.
(d) Give an argument which shows that the limit cycle is unique, i.e., there are no otherperiodic trajectories.
(a) We first rewrite the system as
x = y, y = −x− ay(x2 + y2 − 1). (1)
Next, we convert it to polar coordinates: we have
rr = xx+ yy = −ay2(x2 + y2 − 1)⇒ r = −ar sin2(θ)(r2 − 1) (2)
2

and
r2θ = xy − yx = −(x2 + y2)− axy(x2 + y2 − 1)⇒ θ = −1− a sin(θ) cos(θ)(r2 − 1). (3)
At a fixed point, we must have r = 0 which gives r = 0, r = 1 or sin(θ) = 0. Notehowever that we have θ = −1 for r = 1 and sin(θ) = 0 so these do not correspond tofixed points. Thus, the only fixed point occurs at r = 0 (i.e., the origin).
Note furthermore that f(r, θ) = −ar sin2(θ)(r2 − 1) > 0 for 0 < r < 1 and θ 6= 0, πso the origin is unstable. (When θ = 0 or π, we have θ = −1 so these values are notinvariant under this system and hence we can safely ignore these cases.)
Alternatively, we can linearize the system (1) about the origin to classify its stability.We obtain
A(0,0) =
(0 1−1 a
)so that τ = a and ∆ = 1. We infer that the origin is unstable since a > 0 and that itis an unstable node for a > 2 and an unstable spiral for a < 2 (by considering the signof τ 2 − 4∆ = a2 − 4).
(b) Equations (2) and (3) show that r = 1 leads to r = 0 and θ = −1. We deduce that thesystem has a clockwise limit cycle at r = 1. Its amplitude is simply its radius while itsperiod is given by
T =
∫ 2π
0
1
|θ|dθ =
∫ 2π
0
1 dθ = 2π.
(c) Let f(r, θ) = −ar sin2(θ)(r2 − 1) as above. Note then that f(r, θ) > 0 for r < 1 andf(r, θ) < 0 for r > 1 (and θ 6= 0, π) so the flow is always towards the limit cycle atr = 1. Hence, the limit cycle is stable.
(d) Observe that for r > 1, we have f(r, θ) < 0 and for 0 < r < 1, we have f(r, θ) > 0.This shows that all trajectories, other than the fixed point at the origin, converge tothe limit cycle at r = 1 so there can be no other periodic trajectories.
7.2.7 Consider the system x = y + 2xy, y = x+ x2 − y.
(a) Show that fy = gx.
(b) Find V .
(c) Sketch the phase portrait.
(a) Let f(x, y) = y + 2xy and g(x, y) = x + x2 − y. Then, fy = 1 + 2x and gx = 1 + 2xso we have fy ≡ gx. Since this holds on a simply-connected region (i.e., the entire R2),we infer that this is a gradient system (or a potential flow).
3

(b) The potential function V (x, y) obeys −Vx = f and −Vy = g. We therefore have
Vx = −y − 2xy ⇒ V (x, y) = −xy − x2y + h(y)
for some function h(y). This implies that Vy = −x− x2 + h′(y) which, compared with
Vy = −g = −x− x2 + y from above, yields h′(y) = y ⇒ h(y) = y2
2. We conclude that
V (x, y) = −xy − x2y + y2
2is a potential function.
(c) We first find the nullclines of this system. From x = 0, we obtain y = 0 and x = −1/2while from y = 0, we get y = x + x2. Figure 3(a) suggests that we have saddle nodesat (0, 0) and (−1, 0) and a stable node at (−1/2,−1/4). This can be confirmed bylinearizing about these fixed points. Alternatively, we can interpret these points asstationary points of V (i.e., points at which ∇V = 0) and classify them into maxima,minima or saddles. We have
Vxx = −2y, Vyy = 1, Vxy = −1− 2x
so we can compute the Hessian D(x∗, y∗) = (VxxVyy − V 2xy)|(x∗,y∗) at all the stationary
points to classify them.
• We have D(0, 0) = −1 < 0 so (0, 0) is a saddle point.
• We get D(−1, 0) = −1 < 0 so we have a saddle point again at (−1, 0).
• We obtain D(−1/2,−1/4) = 1/2 > 0; since Vyy = 1 > 0, (−1/2,−1/4) is aminimum.
Since the flow always causes a decrease in the value of V , we conclude, as conjecturedabove, that (0, 0) and (−1, 0) are saddle nodes and (−1/2,−1/4) is a stable fixed point.The corresponding phase portrait is shown in Figure 3(b).
(a) Nullclines and vector field (b) The phase portrait
Figure 3: Problem 7.2.7.
4

7.2.12 Show that x = −x+ 2y3 − 2y4, y = −x− y + xy has no periodic solutions.
We first find all the fixed points of this system. Setting x = 0 gives
−x+ 2y3 − 2y4 = 0⇒ x = 2y3(1− y) (4)
while setting y = 0 yields
−x− y + xy = 0⇒ x =y
y − 1. (5)
Plugging (4) in (5) gives
2y3(1− y) =y
y − 1⇒ 2y3(1− y)2 + y = 0⇒ y(2y2(1− y)2 + 1) = 0.
Since 2y2(1 − y)2 + 1 > 0, we conclude that y = 0 is the only solution, which in turn givesx = 0. Thus, (0, 0) is the only fixed point.
Next, we show that the origin is globally asymptotically stable by finding a Liapunovfunction for this system. Consider V (x, y) = xm + ayn for positive even integers m and nand a > 0; we shall pin down these values later on but note that these conditions suffice toshow that V (x, y) > 0 for (x, y) 6= (0, 0) and V (0, 0) = 0. Next, we compute
V (x, y) = Vx(x, y)x+ Vy(x, y)y
= (mxm−1)(−x+ 2y3 − 2y4) + (anyn−1)(−x− y + xy)
= −mxm − anyn + (2mxm−1y3 − 2mxm−1y4 − anxyn−1 + anxyn)
where we have grouped together terms which contain odd powers of x or y. Recall that weshould choose m, n and a so that all such terms vanish. This can be achieved by requiringthat
2mxm−1y3 ≡ anxyn−1, 2mxm−1y4 ≡ anxyn.
These yield m = 2, n = 4 and a = 1, which is in agreement with the conditions imposed onthese parameters earlier. Note further then that
V (x, y) = −2x2 − 4y4
so V < 0 for (x, y) 6= (0, 0). We conclude that V (x, y) = x2 + y4 is a valid Liapunov functionfor this system so the origin is globally asymptotically stable and hence no periodic solutionscan occur.
7.2.18 Consider the predator–prey model
x = rx(
1− x
2
)− 2xy
1 + x, y = −y +
2xy
1 + x
where r > 0 and x, y ≥ 0. Prove that it has no periodic trajectory. Use Dulac’s criterionwith B(x, y) = 1+x
xyα−1 with suitable α.
5

Note first that at x = 0, we get x = 0 and y = −y so a trajectory of the system lies onx = 0. Similarly, at y = 0, we have x = rx(1 − x/2) and y = 0 so some trajectories coverthe whole of y = 0 as well. Thus, if any periodic trajectory exists, it must lie entirely in thex, y > 0 region.
Let f(x, y) = rx(1− x
2
)− 2xy
1+xand g(x, y) = −y + 2xy
1+x. We then have
B(x, y)f(x, y) = ryα−1(1 + x)(
1− x
2
)− 2yα
⇒ ∂
∂xB(x, y)f(x, y) = ryα−1
(1
2− x)
(6)
B(x, y)g(x, y) = yα(
1− 1
x
)⇒ ∂
∂yB(x, y)g(x, y) = αyα−1
(1− 1
x
). (7)
Combining (6) and (7), we obtain
div
(B(x, y)f(x, y)B(x, y)g(x, y)
)= yα−1
(r2
+ α− rx− α
x
). (8)
We next need to choose a value of α so that (8) does not change sign for x, y > 0.Note that this comes down to the function h(x) := ( r
2+ α) − (rx + α
x). Observe first that,
irrespective of our choice of α, we will always have h(x) < 0 for large enough x. Thus, weneed to ensure h(x) always remains negative. Next, note that if α ≤ 0, h(x) could takepositive values as well so we require α > 0. It is now straightforward to show that the graphof h(x) has a maximum at x =
√α/r with the corresponding value
h(√α/r) =
r
2+ α− 2
√rα.
Thus, if r2
+α−2√rα < 0, we are guaranteed that h(x) < 0 for all x > 0. This condition
yields
α− 2√rα < −r
2⇒ (√α)2 − 2(
√α)(√r) + (
√r)2 < −r
2+ (√r)2
so that (√α−√r)2 < r
2. This further gives
√r
(1− 1√
2
)<√α <√r
(1 +
1√2
)⇒ r
(1− 1√
2
)2
< α < r
(1 +
1√2
)2
.
Note that a valid choice is simply α = r. It follows therefore that there exists a functionB(x, y) that is continuously differentiable for x, y > 0 such that (8) is always negative. ByDulac’s criterion, we conclude that the system possesses no periodic trajectories for x, y > 0.
7.3.3 Show that the system x = x− y − x3, y = x+ y − y3 has a periodic solution.
6

We first find the fixed points of this system. Setting x = 0 gives y = x − x3 whiley = 0 ⇒ x = y3 − y. Clearly, one solution is (0, 0). To show that no other fixed pointsexist, we sketch the nullclines in Figure 4; since there are no other points of intersections,we conclude that the only fixed point is at the origin.
Figure 4: Nullclines for problem 7.3.3
Next, we find the polar representation of this system. Using rr = xx+ yy, we obtain
rr = x(x− y − x3) + y(x+ y − y3) = x2 + y2 − (x4 + y4).
Writing x4 + y4 = (x2 + y2)2 − 2x2y2 gives
rr = r2 − r4 + 2r4 cos2(θ) sin2(θ)⇒ r = r
(1− r2 +
r2 sin2(2θ)
2
). (9)
(Since we shall apply the Poincare-Bendixon theorem and have already found all the fixedpoints, we don’t need the θ equation) Next, we shall use (9) to set up a trapping region forthe trajectories of the system. We first find r1 such that, at r = r1, we obtain r > 0 for allθ, i.e.,
r1
(1− r21 +
r21 sin2(2θ)
2
)> 0.
A sufficient condition to ensure the above inequality holds for all θ is
r1(1− r21
)> 0
where we have replaced sin2(2θ) by its smallest value. This inequality yields r1 < 1.Next, we find r2 such that, at r = r2, the flow is inward, i.e., r < 0 so that
r2
(1− r22 +
r22 sin2(2θ)
2
)< 0
for all θ. This inequality always holds if
r2
(1− r22 +
r222
)< 0
7

where we have replaced sin2(2θ) by its largest value. This leads to r2(1− r22/2) < 0⇒ r2 >√2.
Finally, define Rr1,r2 = {(r, θ) : r1 ≤ r ≤ r2} for any 0 < r1 < 1 and r2 >√
2. We knowthat Rr1.r2 contains no fixed points of the system and, by design, it is a trapping region. Bythe Poincare-Bendixon theorem, it follows that Rr1,r2 contains a periodic solution.
7.3.5 Show that the system x = −x− y+ x(x2 + 2y2), y = x− y+ y(x2 + 2y2) has at leastone periodic solution.
We begin by rewriting the system in its polar representation. We have
rr = xx+ yy
= x(−x− y + x(x2 + 2y2)) + y(x− y + y(x2 + 2y2))
= −(x2 + y2) + (x2 + y2)(x2 + 2y2)
= −r2 + r2(r2 + r2 sin2(θ))
⇒ r = −r + r3(1 + sin2(θ)). (10)
Similarly,
r2θ = xy − yx= x(x− y + y(x2 + 2y2))− y(−x− y + x(x2 + 2y2))
= x2 + y2 = r2
⇒ θ = 1. (11)
It follows from θ = 1 that the system has no fixed points away from the origin; sincer = 0 for r = 0, we conclude that the only fixed point is at the origin.
Next, we set the stage for Poincare-Bendixon. It turns out, however, that equations (10)and (11) do not yield a trapping region (because the limit cycle is unstable). We insteadconsider the system with time flowing backwards, i.e., we make the transformation t → −tto obtain
r = r − r3(1 + sin2(θ)) (12)
θ = −1. (13)
Note that this system again has only one fixed point at the origin. Next, we show that thereexist r1 and r2 such that r|r=r1 > 0 and r|r=r2 < 0. The first of these boils down to
r1 − r31(1 + sin2(θ)) > 0
for all θ. This condition is met if
r1 − r31(2) > 0⇒ r1 <1√2.
Likewise, the r2 condition is
r2 − r32(1 + sin2(θ)) < 0
8

which is met for all θ if
r2 − r32 < 0⇒ r2 > 1.
Define Rr1,r2 = {(r, θ) : r1 ≤ r ≤ r2} for any 0 < r1 < 1/√
2 and r2 > 1. We knowthat Rr1.r2 contains no fixed points of the system given by (12,13) and, by design, it is atrapping region. By the Poincare-Bendixon theorem, it follows that Rr1,r2 contains a stableperiodic solution for this system. Since the periodic solution will also be present when timeis reversed back (with its direction reversed), we conclude that the original system (10,11)also possesses a periodic solution.
7.3.7 Consider x = y+ ax(1− 2b− r2), y = −x+ ay(1− r2), where a and b are parameters(0 < a ≤ 1, 0 ≤ b < 1
2) and r2 = x2 + y2.
(a) Rewrite the system in polar coordinates.
(b) Prove that there is at least one limit cycle, and that if there are several, they all havethe same period T (a, b).
(c) Prove that for b = 0, there is only one limit cycle.
(a) We have
rr = xx+ yy
= x(y + ax(1− 2b− r2)) + y(−x+ ay(1− r2))= ax2(1− 2b− r2) + ay2(1− r2)= a(1− r2)(x2 + y2)− 2abx2
= a(1− r2)r2 − 2abr2 cos2(θ)
⇒ r = ar(1− r2 − 2b cos2(θ)) (14)
and
r2θ = xy − yx= x(−x+ ay(1− r2))− y(y + ax(1− 2b− r2))= −(x2 + y2) + axy(1− r2 − (1− 2b− r2))= −r2 + 2abxy
= −r2 + 2abr2 cos(θ) sin(θ)
⇒ θ = −1 + ab sin(2θ). (15)
(b) Note first that since 0 < a ≤ 1 and 0 ≤ b < 12, we have ab sin(2θ) < 1
2so θ < −1
2.
Thus, we cannot have fixed points away from the origin. At the origin, we have r = 0so we conclude that the only fixed point of this system is at the origin.
Next, we design a trapping region for this system. We find r1 and r2 such that
r|r=r1 > 0, r|r=r2 < 0
9

for all θ. The first condition is
ar1(1− r21 − 2b cos2(θ)) > 0
and is met if
ar1(1− r21 − 2b) > 0⇒ r1 <√
1− 2b.
(Note that 0 < 1− 2b ≤ 1 so the square root is well defined) Likewise, the r2 conditionis
ar2(1− r22 − 2b cos2(θ)) < 0
and is satisfied if
ar2(1− r22) < 0⇒ r2 > 1.
Finally, define Rr1,r2 = {(r, θ) : r1 ≤ r ≤ r2} for any 0 < r1 <√
1− 2b and r2 > 1.We know that Rr1,r2 contains no fixed points of the system and, by design, it is atrapping region. By the Poincare-Bendixon theorem, it follows that Rr1,r2 contains aclosed periodic solution. More precisely, a trajectory trapped in Rr1,r2 will converge toa closed orbit which must necessarily be a limit cycle. Thus, the system possesses atleast one limit cycle.
Next, note that the periods of all such orbits are given by
T (a, b) =
∫ 2π
0
1
|θ|dθ =
∫ 2π
0
1
1− ab sin(2θ)dθ,
hence showing that the period is the same for all the orbits. In fact, we can evaluatethis integral exactly (the problem doesn’t require this but it’s pretty straightforward).Using the substitution φ = 2θ, we obtain
T (a, b) =1
2
∫ 4π
0
1
1− ab sin(φ)dφ =
∫ 2π
0
1
1− ab sin(φ)dφ
where we used the periodicity of the integrand to rewrite the integral over [0, 2π].Recall that this is simply the formula for the period of a non-uniform oscillator on acircle and evaluates to
T (a, b) =2π√
1− (ab)2.
(c) For b = 0, we obtain the system
r = ar(1− r2), θ = −1
which clearly possesses a unique stable limit cycle at r = 1.
10

7.3.10 (Bonus) Consider the two–dimensional system x = Ax− r2x, where r = ‖x‖ andA is a 2× 2 constant real matrix with complex eigenvalues α± iω. Prove that there existsat least one limit cycle for α > 0 and that there are none for α < 0.
We first find all the fixed points of this system. Clearly, it has a fixed point at the origin.To show there are no others, suppose (x0, y0) is a fixed point away from the origin. It followsthat
A
(x0y0
)− (x20 + y20)
(x0y0
)= 0⇒ (A− (x20 + y20)I)
(x0y0
)= 0
where I is the 2× 2 identity matrix. Since we have assumed that
(x0y0
)6=(
00
), the matrix
(A− (x20 + y20)I) is singular and hence must have at least eigenvalue equal to zero. However,since A only has complex eigenvalues and (x20 + y20) ∈ R, all eigenvalues of (A− (x20 + y20)I)must be complex as well. More precisely, they must have a non-zero imaginary part andhence cannot equal zero, bringing us to a contradiction. We conclude that the only fixedpoint of the system is at the origin.
Next, we show that at all points sufficiently far away from the origin, the flow is inward.Converting to polar coordinates, we obtain
rr = xx+ yy =(x y
)(xy
)= xT x = xT (Ax− r2x)
= xTAx− r2xTx= xTAx− r4. (16)
Observe that
xTAx ≤ ‖xTAx‖ ≤ ‖A‖‖x‖2 = ‖A‖r2 (17)
where ‖A‖ can be taken to be either the 2–norm (square root of the largest eigenvalue of ATA)or the Frobenius norm (square root of sum of squares of all entries or simply
√tr(ATA)).
In any case, it is some finite value so, using (17) in (16), we obtain
rr ≤ ‖A‖r2 − r4 ⇒ r ≤ r(‖A‖ − r2).
It follows that for r > r0 =√‖A‖, we have r < 0 so the flow is inward at all points
sufficiently far out. This implies that no trajectory can escape the region r ≤ r0.Now, suppose that α > 0. Note that the linearized system about the origin is simply
x = Ax which has complex eigenvalues α± iω. The positive real part implies that the originis a repeller. Thus, there exists a trajectory x(t) and some (small enough) ε > 0 such that‖x(t)‖ ≥ ε. Define Rε,r0{(r, θ) : ε ≤ r ≤ r0}. We know that Rε,r0 is a trapping region forthis trajectory and that it does not contain any fixed points. By the Poincare-Bendixontheorem, this trajectory must converge to a closed orbit in Rε,r0 which must necessarily bea limit cycle.
Finally, let α < 0. We have
div(Ax− r2x) = div(Ax)− div(r2x)
11

where we used the linearity of the divergence operator. We have div(Ax) = tr(A) = 2α and
div(r2x) = div
(x(x2 + y2)y(x2 + y2)
)= (3x2 + y2) + (x2 + 3y2) = 4r2.
Thus, div(Ax−r2x) = 2α−4r2 is strictly negative on R2 so, by Dulac’s criterion, the systemcannot possess a closed orbit.
12