Krzywe stożkowe Lekcja VII: Hiperbolaprac.im.pwr.wroc.pl/~skarupski/pres7b.pdf · Czym jest...
32
Krzywe stożkowe Lekcja VII: Hiperbola Marek Skarupski Wydzial Matematyki Politechniki Wroclawskiej Marek Skarupski Krzywe stożkowe Lekcja VII: Hiperbola
Transcript of Krzywe stożkowe Lekcja VII: Hiperbolaprac.im.pwr.wroc.pl/~skarupski/pres7b.pdf · Czym jest...
Krzywe stożkoweLekcja VII: Hiperbola
Marek Skarupski
Wydział Matematyki Politechniki Wrocławskiej
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
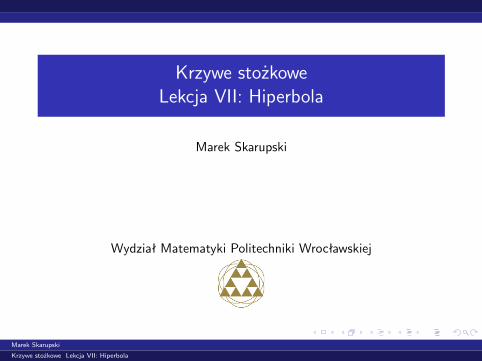
Czym jest hiperbola?
Hiperbola jest krzywą stożkową powstałą przez przecięcie stożkapłaszczyzną pod kątem 0 ¬ β < α (gdzie α jest kątem pomiędzywysokością stożka a jego tworzącą) tak, aby linia cięcia nie pokrywała sięz wysokością stożka.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Czym jest hiperbola?
Hiperbolę można zdefiniować także jako zbiór punktów takich, że różnicaodległośći od dwóch ustalonych punktów jest stała.
Formalnie:
{P ∈ R2 : |PF1| − |PF2| = const}
Punkty F1,F2 nazywamy ogniskami hiperboli.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Czym jest hiperbola?
Hiperbolę można zdefiniować także jako zbiór punktów takich, że różnicaodległośći od dwóch ustalonych punktów jest stała. Formalnie:
{P ∈ R2 : |PF1| − |PF2| = const}
Punkty F1,F2 nazywamy ogniskami hiperboli.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Czym jest hiperbola?
Hiperbolę można zdefiniować także jako zbiór punktów takich, że różnicaodległośći od dwóch ustalonych punktów jest stała. Formalnie:
{P ∈ R2 : |PF1| − |PF2| = const}
Punkty F1,F2 nazywamy ogniskami hiperboli.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
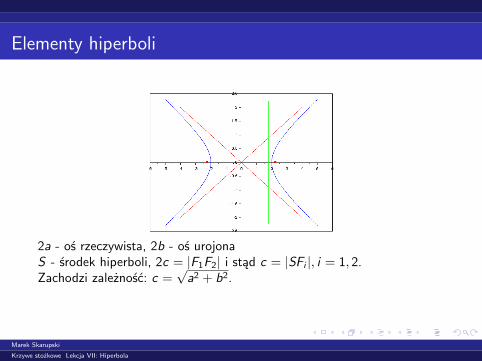
Elementy hiperboli
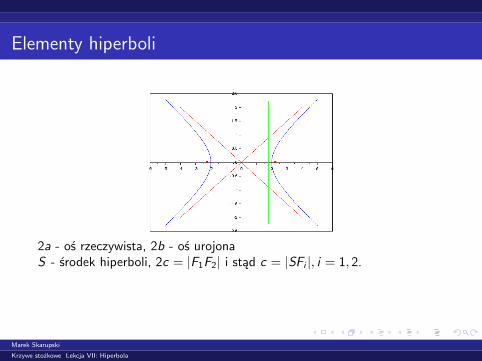
2a - oś rzeczywista, 2b - oś urojonaS - środek hiperboli, 2c = |F1F2| i stąd c = |SFi |, i = 1, 2.
Zachodzi zależność: c =√a2 + b2. Mimośród hiperboli: m = c
a > 1Oprócz tego wyznacza się tzw. parametr ogniskowy, czyli połowę cięciwyprzechodzącej przez jedno z ognisk prostopadle do osi rzeczywistej:p = b2
a
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
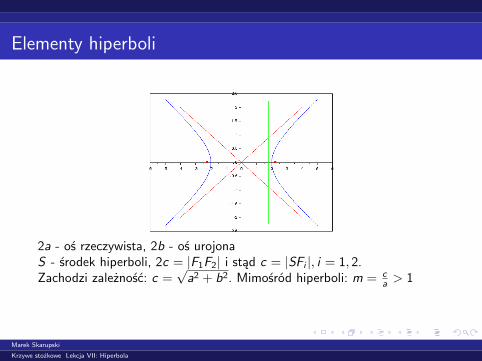
Elementy hiperboli
2a - oś rzeczywista, 2b - oś urojonaS - środek hiperboli, 2c = |F1F2| i stąd c = |SFi |, i = 1, 2.Zachodzi zależność: c =
√a2 + b2.
Mimośród hiperboli: m = ca > 1
Oprócz tego wyznacza się tzw. parametr ogniskowy, czyli połowę cięciwyprzechodzącej przez jedno z ognisk prostopadle do osi rzeczywistej:p = b2
a
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
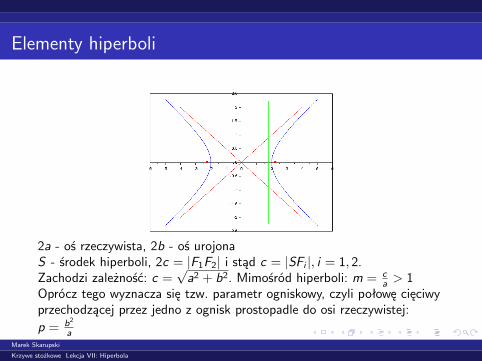
Elementy hiperboli
2a - oś rzeczywista, 2b - oś urojonaS - środek hiperboli, 2c = |F1F2| i stąd c = |SFi |, i = 1, 2.Zachodzi zależność: c =
√a2 + b2. Mimośród hiperboli: m = c
a > 1
Oprócz tego wyznacza się tzw. parametr ogniskowy, czyli połowę cięciwyprzechodzącej przez jedno z ognisk prostopadle do osi rzeczywistej:p = b2
a
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Elementy hiperboli
2a - oś rzeczywista, 2b - oś urojonaS - środek hiperboli, 2c = |F1F2| i stąd c = |SFi |, i = 1, 2.Zachodzi zależność: c =
√a2 + b2. Mimośród hiperboli: m = c
a > 1Oprócz tego wyznacza się tzw. parametr ogniskowy, czyli połowę cięciwyprzechodzącej przez jedno z ognisk prostopadle do osi rzeczywistej:p = b2
aMarek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie kanoniczne hiperboli
Niech dana będzie hiperbola o środku w punkcie S(x0, y0) oraz osiach2a, 2b równoległych do osi układu współrzędnych.
Wtedy równaniekanoniczne hiperboli dane jest wzorem
(x − x0)2
a2− (y − y0)2
b2= 1. (1)
Przy takim położeniu ogniska mają współrzędne:
F1 = (x0 − c , y0) F2 = (x0 + c , y0)
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie kanoniczne hiperboli
Niech dana będzie hiperbola o środku w punkcie S(x0, y0) oraz osiach2a, 2b równoległych do osi układu współrzędnych. Wtedy równaniekanoniczne hiperboli dane jest wzorem
(x − x0)2
a2− (y − y0)2
b2= 1. (1)
Przy takim położeniu ogniska mają współrzędne:
F1 = (x0 − c , y0) F2 = (x0 + c , y0)
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie kanoniczne hiperboli
Niech dana będzie hiperbola o środku w punkcie S(x0, y0) oraz osiach2a, 2b równoległych do osi układu współrzędnych. Wtedy równaniekanoniczne hiperboli dane jest wzorem
(x − x0)2
a2− (y − y0)2
b2= 1. (1)
Przy takim położeniu ogniska mają współrzędne:
F1 = (x0 − c , y0) F2 = (x0 + c , y0)
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie w postaci parametrycznej
Przy takich samych założeniach jak poprzednio możemy wyznaczyćrównania parametryczne hiperboli:
x = x0 + a cosh(α), y = y0 + b sinh(α), (2)
gdzie
cosh(t) =et + e−t
2, sinh(t) =
et − e−t
2,
gdzie liczba e jest stałą Eulera (podstawą logarytmów naruralnych.
e = limn→∞
(1 +
1n
)n≈ 2.73
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie w postaci parametrycznej
Przy takich samych założeniach jak poprzednio możemy wyznaczyćrównania parametryczne hiperboli:
x = x0 + a cosh(α), y = y0 + b sinh(α), (2)
gdzie
cosh(t) =et + e−t
2, sinh(t) =
et − e−t
2,
gdzie liczba e jest stałą Eulera (podstawą logarytmów naruralnych.
e = limn→∞
(1 +
1n
)n≈ 2.73
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie w postaci parametrycznej
Przy takich samych założeniach jak poprzednio możemy wyznaczyćrównania parametryczne hiperboli:
x = x0 + a cosh(α), y = y0 + b sinh(α), (2)
gdzie
cosh(t) =et + e−t
2, sinh(t) =
et − e−t
2,
gdzie liczba e jest stałą Eulera (podstawą logarytmów naruralnych.
e = limn→∞
(1 +
1n
)n≈ 2.73
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie w postaci parametrycznej
Istnieje też inna możliwość wyznaczenia równań parametrycznych dlahiperboli:
x = x0 + a1
cos(α), y = y0 + b tg(α). (3)
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie w postaci biegunowej
Niech środek hiperboli będzie w biegunie. Wtedy równanie biegunoweelipsy ma postać:
ρ =p
1 +m cos(φ)(4)
gdzie p jest parametrem ogniskowym, m to mimośród.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Kierownice hiperboli
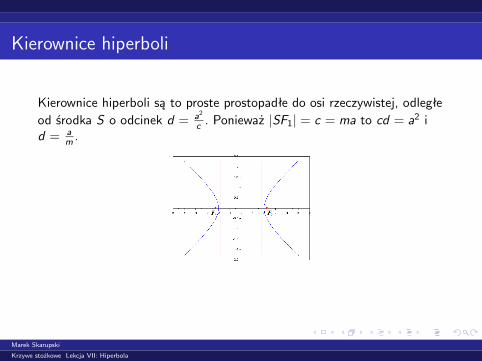
Kierownice hiperboli są to proste prostopadłe do osi rzeczywistej, odległeod środka S o odcinek d = a2
c . Ponieważ |SF1| = c = ma to cd = a2 id = a
m .
Zachodzi związek: r1d1 =r2d2
= m > 1.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Kierownice hiperboli
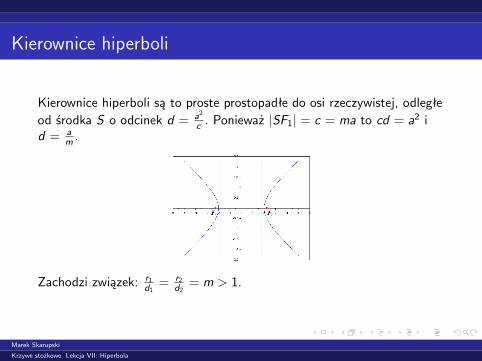
Kierownice hiperboli są to proste prostopadłe do osi rzeczywistej, odległeod środka S o odcinek d = a2
c . Ponieważ |SF1| = c = ma to cd = a2 id = a
m .
Zachodzi związek: r1d1 =r2d2
= m > 1.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Kierownice hiperboli
Kierownice hiperboli są to proste prostopadłe do osi rzeczywistej, odległeod środka S o odcinek d = a2
c . Ponieważ |SF1| = c = ma to cd = a2 id = a
m .
Zachodzi związek: r1d1 =r2d2
= m > 1.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Asymptoty hiperboli
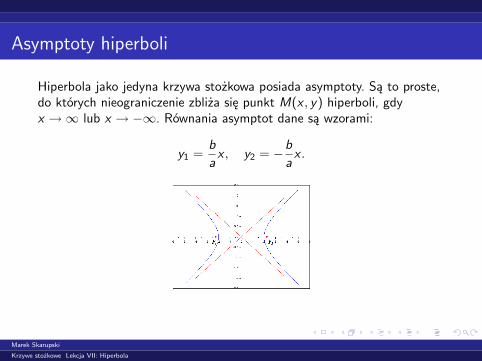
Hiperbola jako jedyna krzywa stożkowa posiada asymptoty.
Są to proste,do których nieograniczenie zbliża się punkt M(x , y) hiperboli, gdyx →∞ lub x → −∞. Równania asymptot dane są wzorami:
y1 =bax , y2 = −
bax .
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Asymptoty hiperboli
Hiperbola jako jedyna krzywa stożkowa posiada asymptoty. Są to proste,do których nieograniczenie zbliża się punkt M(x , y) hiperboli, gdyx →∞ lub x → −∞.
Równania asymptot dane są wzorami:
y1 =bax , y2 = −
bax .
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Asymptoty hiperboli
Hiperbola jako jedyna krzywa stożkowa posiada asymptoty. Są to proste,do których nieograniczenie zbliża się punkt M(x , y) hiperboli, gdyx →∞ lub x → −∞. Równania asymptot dane są wzorami:
y1 =bax , y2 = −
bax .
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie stycznej do hiperboli
Niech punkt P(x1, y1) należy do hiperboli. Wtedy równanie stycznej dohiperboli w punkcie P ma postać:
(y1 − y0)(y − y0)(x1 − x0) + (x − x0)
= p
Niech punkt P(x1, y1) należy do paraboli o kierownicy prostopadłej do osiOY . Wtedy równanie stycznej do paraboli w punkcie P ma postać:
(x1 − x0)(x − x0)a2
− (y1 − y0) + (y − y0)b2
= 1
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie stycznej do hiperboli
Niech punkt P(x1, y1) należy do hiperboli. Wtedy równanie stycznej dohiperboli w punkcie P ma postać:
(y1 − y0)(y − y0)(x1 − x0) + (x − x0)
= p
Niech punkt P(x1, y1) należy do paraboli o kierownicy prostopadłej do osiOY . Wtedy równanie stycznej do paraboli w punkcie P ma postać:
(x1 − x0)(x − x0)a2
− (y1 − y0) + (y − y0)b2
= 1
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie stycznej do hiperboli - c.d.
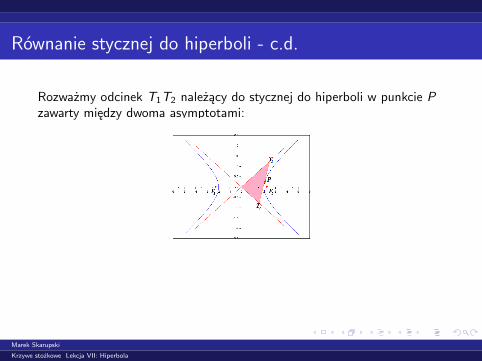
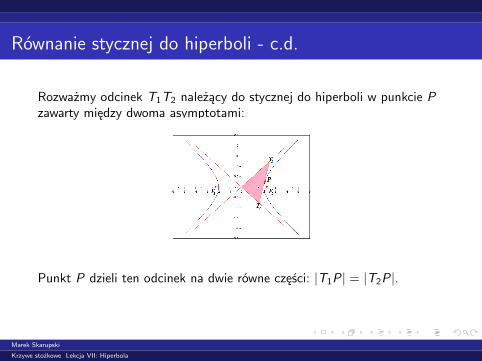
Rozważmy odcinek T1T2 należący do stycznej do hiperboli w punkcie Pzawarty między dwoma asymptotami:
Punkt P dzieli ten odcinek na dwie równe części: |T1P| = |T2P|.Pole trójkąta T1OT2 jest równe ab.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Równanie stycznej do hiperboli - c.d.
Rozważmy odcinek T1T2 należący do stycznej do hiperboli w punkcie Pzawarty między dwoma asymptotami:
Punkt P dzieli ten odcinek na dwie równe części: |T1P| = |T2P|.
Pole trójkąta T1OT2 jest równe ab.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola

Równanie stycznej do hiperboli - c.d.
Rozważmy odcinek T1T2 należący do stycznej do hiperboli w punkcie Pzawarty między dwoma asymptotami:
Punkt P dzieli ten odcinek na dwie równe części: |T1P| = |T2P|.Pole trójkąta T1OT2 jest równe ab.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Hiperbola równoosiowa
Hiperbolę równoosiową otrzymujemy wówczas, gdy osie hiperboli sąrówne: a = b. Wtedy też asymptoty są do siebie prostopadłe.
Jeśli dokonamy obrotu naszej hiperboli o kąt π4 wokół środka hiperboliotrzymujemy hiperbolę, której asymptoty są równoległe z osiami układuwspółrzędnych.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Hiperbola równoosiowa
Hiperbolę równoosiową otrzymujemy wówczas, gdy osie hiperboli sąrówne: a = b. Wtedy też asymptoty są do siebie prostopadłe.Jeśli dokonamy obrotu naszej hiperboli o kąt π4 wokół środka hiperboliotrzymujemy hiperbolę, której asymptoty są równoległe z osiami układuwspółrzędnych.
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola
Hiperbola równoosiowa - c.d.
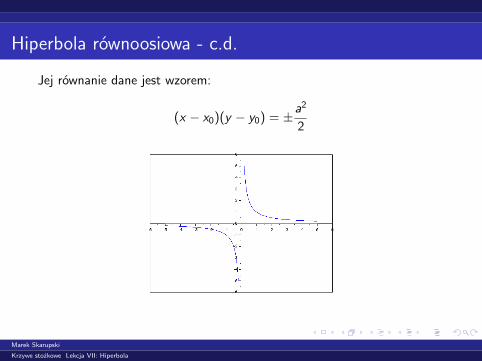
Jej równanie dane jest wzorem:
(x − x0)(y − y0) = ±a2
2
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola

Podziękowania
Dziękuję za uwagę
Marek Skarupski
Krzywe stożkowe Lekcja VII: Hiperbola