Kernels - University of Houston
39
Kernels Nuno Vasconcelos ECE Department, UCSD
Transcript of Kernels - University of Houston
Kernels
Nuno Vasconcelos ECE Department, UCSDp ,
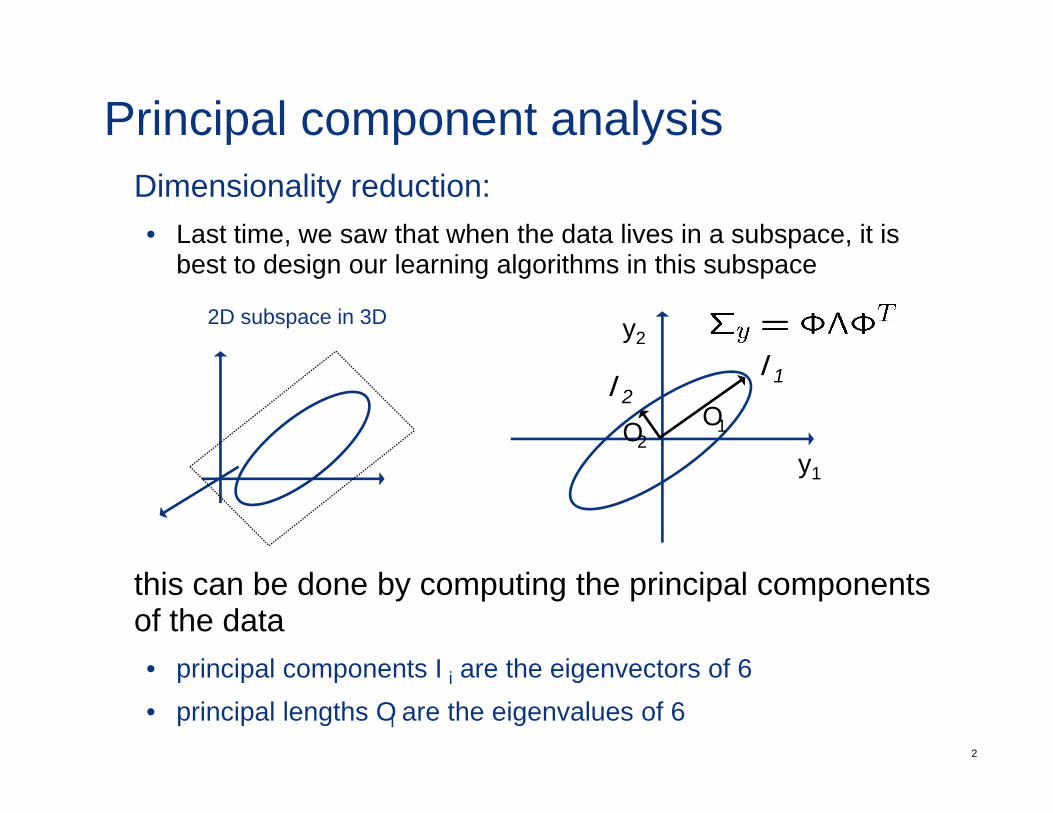
Principal component analysisDimensionality reduction:• Last time, we saw that when the data lives in a subspace, it is
best to design our learning algorithms in this subspace
2D subspace in 3D y2
φ
λ1λ2
φ1φ2
y1
this can be done by computing the principal components of the data
i i l t φ th i t f Σ
2
• principal components φi are the eigenvectors of Σ• principal lengths λi are the eigenvalues of Σ
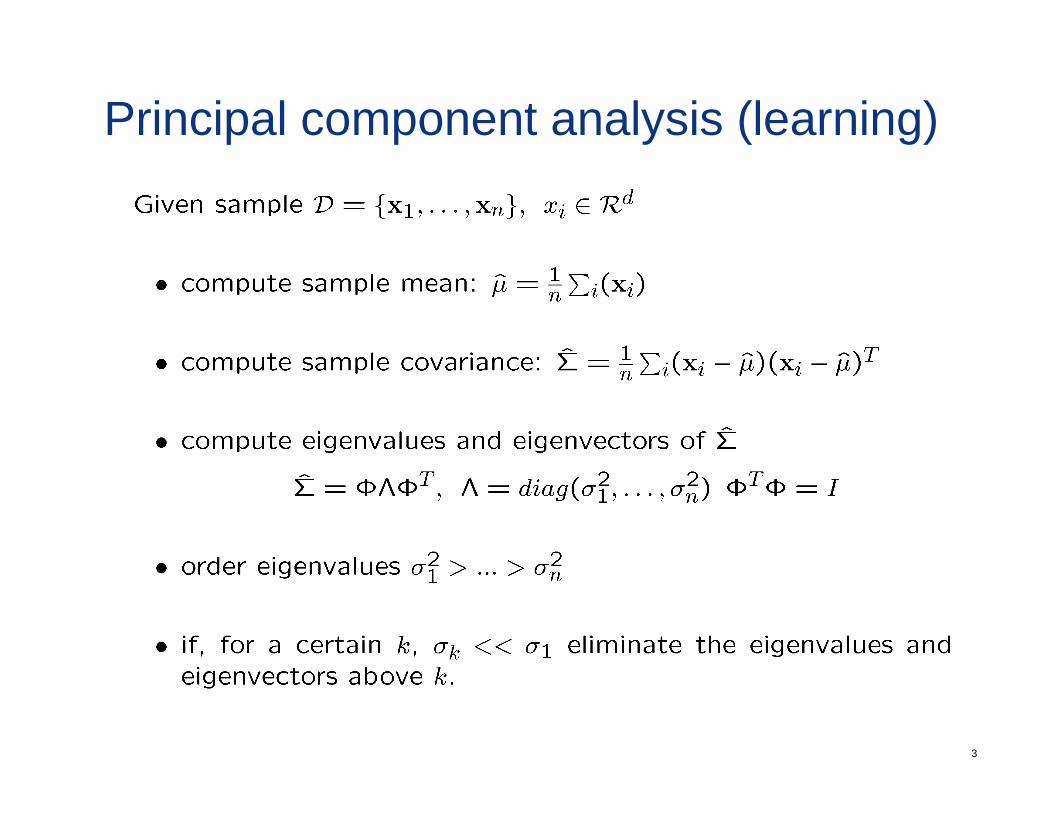
Principal component analysis (learning)
3
Principal component analysis
4
PCA by SVDwe next saw that PCA can be computed by the SVD of the data matrix directlygiven X with one example per column• 1) create the centered data-matrix
TTTc X
nIX ⎟
⎠⎞
⎜⎝⎛ −= 111
• 2) compute its SVD
TTcX ΜΠΝ=
• 3) principal components are columns of N, eigenvalues are
cX ΜΠΝ
5
ii n πλ =
ExtensionsToday we will talk about kernels• turns out that any algorithm which depends on the data throughturns out that any algorithm which depends on the data through
dot-products only, i.e. the matrix of elements
T xxcan be kernelized
ji xx
• this is usually beneficial, we will see why later• for now we look at the question of whether PCA can be written in
the form above⎤⎡recall the data matrix is
⎥⎥⎤
⎢⎢⎡
=||
1 nxxX K
6
⎥⎥⎦⎢
⎢⎣ ||
Extensionswe saw that the centered-data matrix and the covariance can be written as
⎞⎛⎟⎠⎞
⎜⎝⎛ −= T
c nIXX 111 T
cc XXn1
=Σ
the eigenvector φi of eigenvalue λi is
TT XXXX φααφφ ===11
hence, the eigenvector matrix is
iciici
icci
i XXn
XXn
φααλ
φλ
φ === ,
⎥⎥⎤
⎢⎢⎡
=ΓΓ=Φ
||
, 1 dcX λ
αλ
α K
7
⎥⎥
⎦⎢⎢
⎣
ΓΓΦ
||
,dd
c nnX λλ K
Extensionswe next note that, from the eigenvector decomposition
ΣΦΦ=Λ⇔ΦΛΦ=Σ TT
andΣΦΦ=Λ⇔ΦΛΦ=Σ
⎞⎜⎛ TTT 1
( )( )
Γ⎠⎞
⎜⎝⎛Γ=Λ c
Tcc
Tc
T XXXn
X
1
1
i
( )( )ΓΓ= cT
ccT
cT XXXX
n1
i.e.( )( ) T
cT
ccT
c XXXXn
ΓΛΓ=1
8
Extensionsin summary, we have
TΦΛΦ=Σ Γ=Φ cX
( )( ) Tc
Tcc
Tc XXXX
nΓΛΓ=
1
this means that we can obtain PCA by• 1) assembling n-1(X TX )(X TX )
n
• 1) assembling n 1(XcTXc)(Xc
TXc)• 2) computing its eigen-decomposition (Λ,Γ)
PCAC• the principal components are then given by XcΓ
• the eigenvalues are given by Λ
9
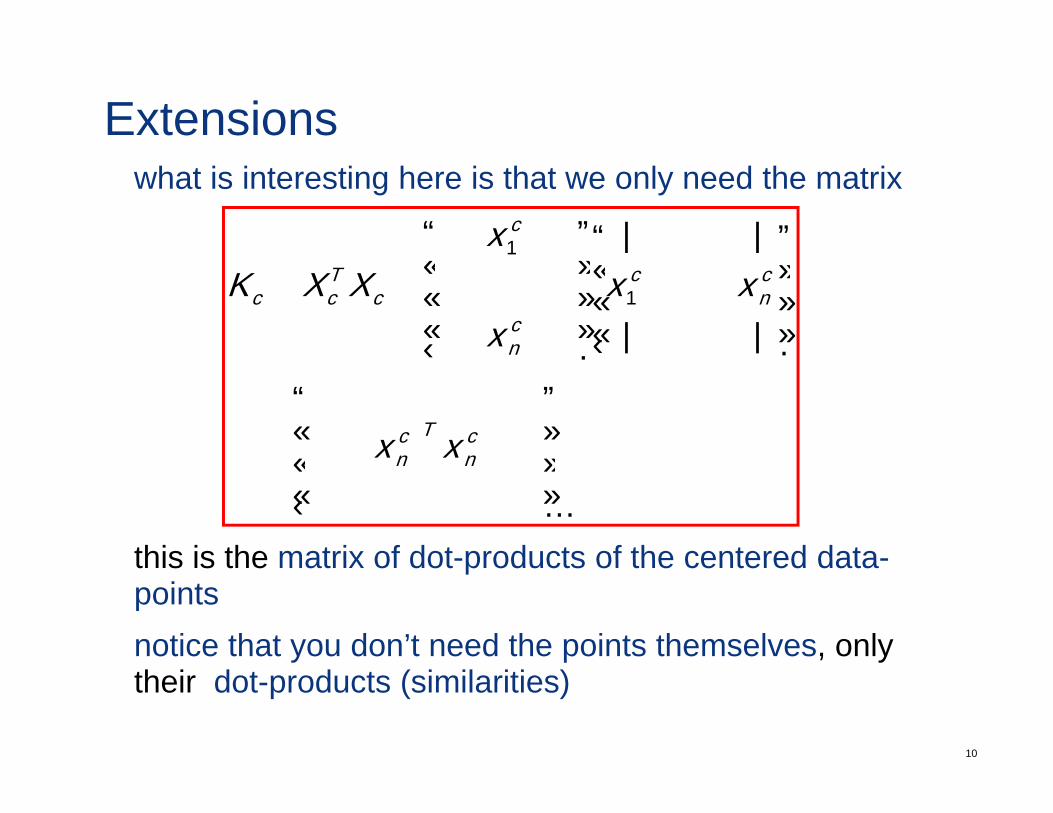
Extensionswhat is interesting here is that we only need the matrix
⎥⎤
⎢⎡
⎥⎤
⎢⎡ −− cx ||1
⎥⎥⎥
⎦⎢⎢⎢
⎣⎥⎥⎥
⎦⎢⎢⎢
⎣ −−== KM c
nc
cn
cTcc xx
xXXK
||
||
1
1
( ) ⎥⎥⎤
⎢⎢⎡
=
⎦⎣⎦⎣
KK
Mcn
Tcn xx
this is the matrix of dot-products of the centered data-
( )⎥⎥⎦⎢
⎢⎣ M
KK nn
this is the matrix of dot-products of the centered data-pointsnotice that you don’t need the points themselves, only
10
their dot-products (similarities)
Extensionsto compute PCA, we use the fact that
( )( ) TTT 11 ( )( ) Tccc
Tcc
Tc KK
nXXXX
n11
=
but if Kc has eigendecomposition (Λ,Γ)
TTTT 2111
h 1(X TX )(X TX ) h i d i i ( 2 )
TTTTcc nn
KKn
ΓΓΛ=ΓΛΓΓΛΓ= 2111
then, n-1(XcTXc)(Xc
TXc) has eigendecomposition (Λ2,Γ)
11
Extensionsin summary, to get PCA• 1) compute the dot-product matrix K• 2) compute its eigen-decomposition (Λ,Γ)
PCAth i i l t th i b Φ X Γ• the principal components are then given by Φ = XcΓ
• the eigenvalues are given by Λ2
• the projection of the data-points on the principal components isthe projection of the data points on the principal components is given by
Γ=Γ=Φ KXXX cT
cT
c
this allows the computation of the eigenvalues and PCA coefficients when we only have access to the dot-product
ccc
12
coefficients when we only have access to the dot product matrix K
The dot product formThis turns out to be the case for many learning algorithmsIf you manipulate a little bit you can write them in “dotIf you manipulate a little bit, you can write them in dot product form”
Definition: a learning algorithm is in dot product form if, given a training set
D {( ) ( )}D = {(x1,y1), ..., (xn,yn)},it only depends on the points Xi through their dot products
XiTXj.Xi Xj.
for example, let’s look at k-means
13
ClusteringWe saw that it iterates bewteen• 1) classification:
2) re estimation:
2* minarg)( ii
xxi µ−=
• 2) re-estimation:
∑= ij
newi x
n)(1µ
note that
∑j
jn
( ) ( )TTT
iT
ii
xxx
xxx µµµ −−=−
2
2
14
iT
iiTT xxx µµµ +−= 2
Clusteringand
∑ i )(1
bi i th t it th t ti
∑=j
iji x
n)(1µ
combining the two, we can write the top equation as a function of the dot products xi
Txj
∑∑ +−=−jl
il
Tij
j
ij
Tkk
Tkik xx
nxx
nxxx )()(
2)(2 12 µ
15
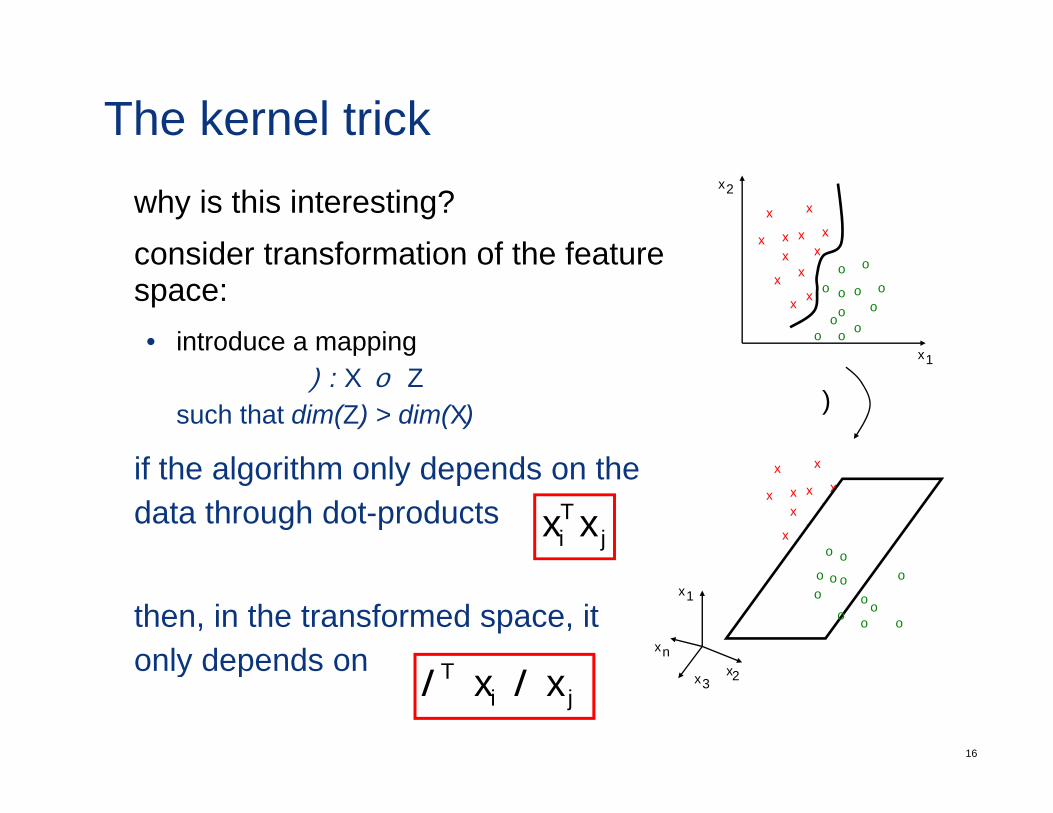
The kernel trickwhy is this interesting?consider transformation of the feature
xx
x
xx
x
x
x2
consider transformation of the featurespace:• introduce a mapping
xx
x
xx
xo
oo
o
o
ooo
ooo
o
x1pp g
Φ: X → Zsuch that dim(Z) > dim(X)
if th l ith l d d th
x1
Φ
if the algorithm only depends on thedata through dot-products
xx
x
x
x
xx
x
xx
x
x
o oj
Ti xx
then, in the transformed space, it only depends on
xo
oo
o
o oo
o oo
ox1
xn
( ) ( )16
only depends onx3
x2( ) ( )jiT xx φφ
The dot product implementationin the transformed space, the learning algorithms only requires dot-productsq p
Φ(xj)TΦ(xi)
note that we no-longer need to store the Φ(xj)note that we no longer need to store the Φ(xj)only the n2 dot-product matrixinterestingly, this holds even when Φ(x) is infiniteinterestingly, this holds even when Φ(x) is infinite dimensional we get a reduction from infinity to n2!there is, however, still one problem:• when dim[Φ(xj)] is infinite the computation of the dot products
looks impossible
17
looks impossible
The “kernel trick”“instead of defining defining Φ(x), computing Φ(xi) for each i and Φ(xi)TΦ(xj) for each pair (i,j), simply define the ( i) ( j) p ( ,j), p yfunction
)()(),( zxzxK T ΦΦ=
and work with it directly.”K(x,z) is called a dot-product kernelin fact, since we only use the kernel, why define Φ(x)?just define the kernel K(x,z) directly!in this way we never have to deal with the complexity of Φ(x)...
18
this is usually called the “kernel trick”
QuestionsI am confused!how do I know that if I pick a function K(x,z), it is p ( , ),equivalent to Φ(x)TΦ(z)?• in general, it is not. We will talk about this later.
if it is, how do I know what Φ(x) is?• you may never know. E.g. the Gaussian kernel
2zx−
is very popular. It is not obvious what Φ(x) is...
σ),(x
ezxK−
=
• on the positive side, we did not know how to choose Φ(x).Choosing instead K(x,z) makes no difference.
why is it that using K(x,z) is easier/better?
19
y g ( , )• complexity. let’s look at an example.
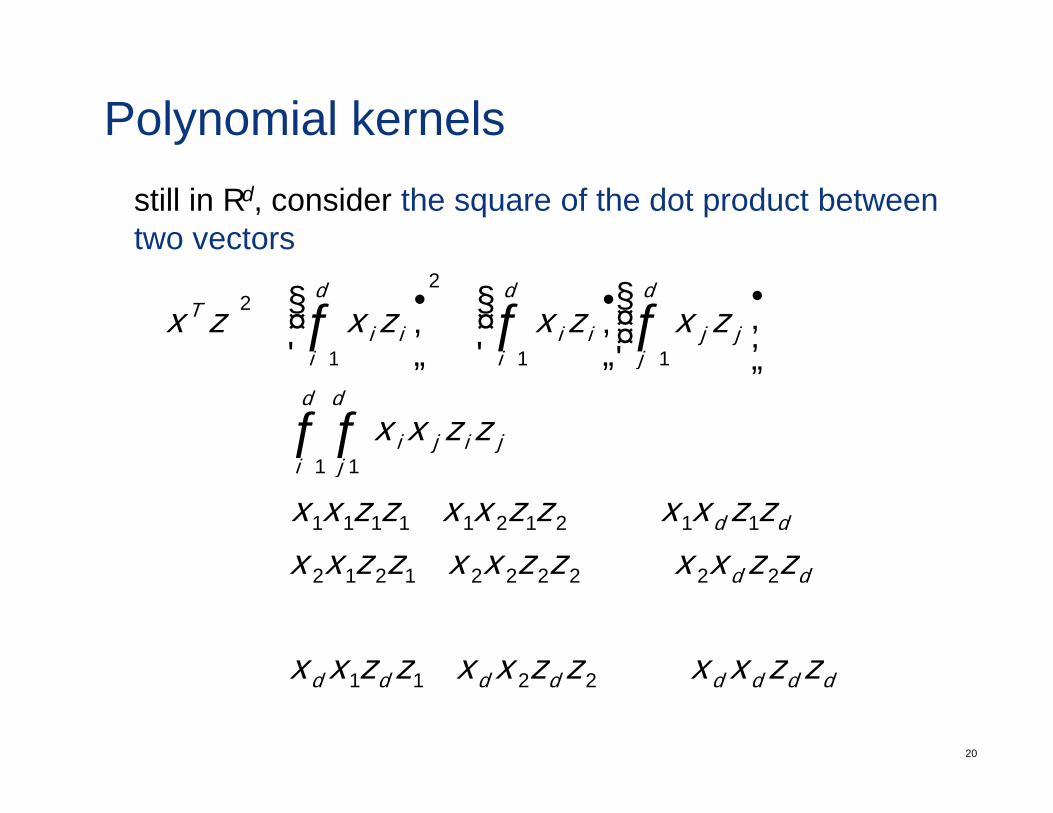
Polynomial kernelsstill in Rd, consider the square of the dot product between two vectors
( )d
jjj
d
iii
d
iii
T zxzxzxzx =⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠
⎞⎜⎝
⎛=⎟
⎠
⎞⎜⎝
⎛= ∑∑∑
11
2
1
2
d d
jiji
jii
zzxx=
⎠⎝⎠⎝⎠⎝
∑∑
=== 111
dd
i j
zzxxzzxxzzxxzzxxzzxxzzxx
+++++++++=
= =
K 1121211111
1 1
dd
zzxxzzxxzzxx
zzxxzzxxzzxx
++++
+++++M
K 2222221212
20
dddddddd zzxxzzxxzzxx ++++ K2211
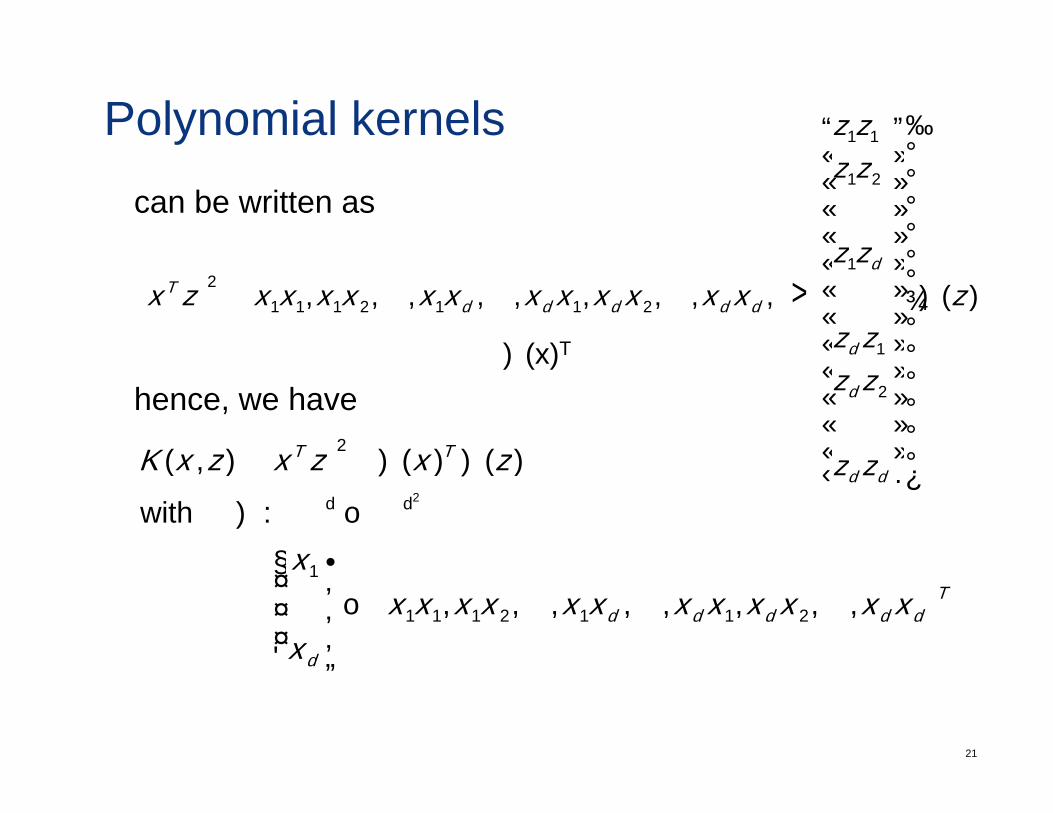
Polynomial kernels 11zz⎪⎫
⎥⎤
⎢⎡
can be written as21
zz
zz
⎪⎪⎪⎪⎪
⎥⎥⎥⎥⎥
⎢⎢⎢⎢⎢
M
( ) [ ] )(,,,,,,,,,
1
1
21121112 z
zz
zzxxxxxxxxxxxxzx
d
d
dddddT Φ
⎪⎪
⎪⎪⎬
⎥⎥⎥⎥⎥
⎢⎢⎢⎢⎢
= M444444444 3444444444 21KKKK
Φ(x)T
hence, we have 2zzd
⎪⎪⎪⎪⎪
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣
M
Φ(x)
( ) TT zxzxzxK )()()( 2ΦΦ zz dd ⎪⎭
⎥⎦
⎢⎣( )
x
zxzxzxK )()(),(
⎞⎛
ℜ→ℜΦ
ΦΦ==
: with2dd
( )Tddddd
d
xxxxxxxxxxxxx
x,,,,,,,, 2112111
1
LLLM →⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
21
d ⎠⎝
Polynomial kernelsthe point is that• while Φ(x)TΦ(z) has complexity O(d2)• while Φ(x) Φ(z) has complexity O(d )• direct computation of K(x,z) = (xTz)2 has complexity O(d)
direct evaluation is more efficient by a factor of dyas d goes to infinity this makes the idea feasibleBTW, you just met another kernel family, y j y• this implements polynomials of second order• in general, the family of polynomial kernels is defined as
I d ’t t t thi k b t iti d Φ( ) !
( ) { }L,2,1,1),( ∈+= kzxzxK kT
22
• I don’t even want to think about writing down Φ(x) !
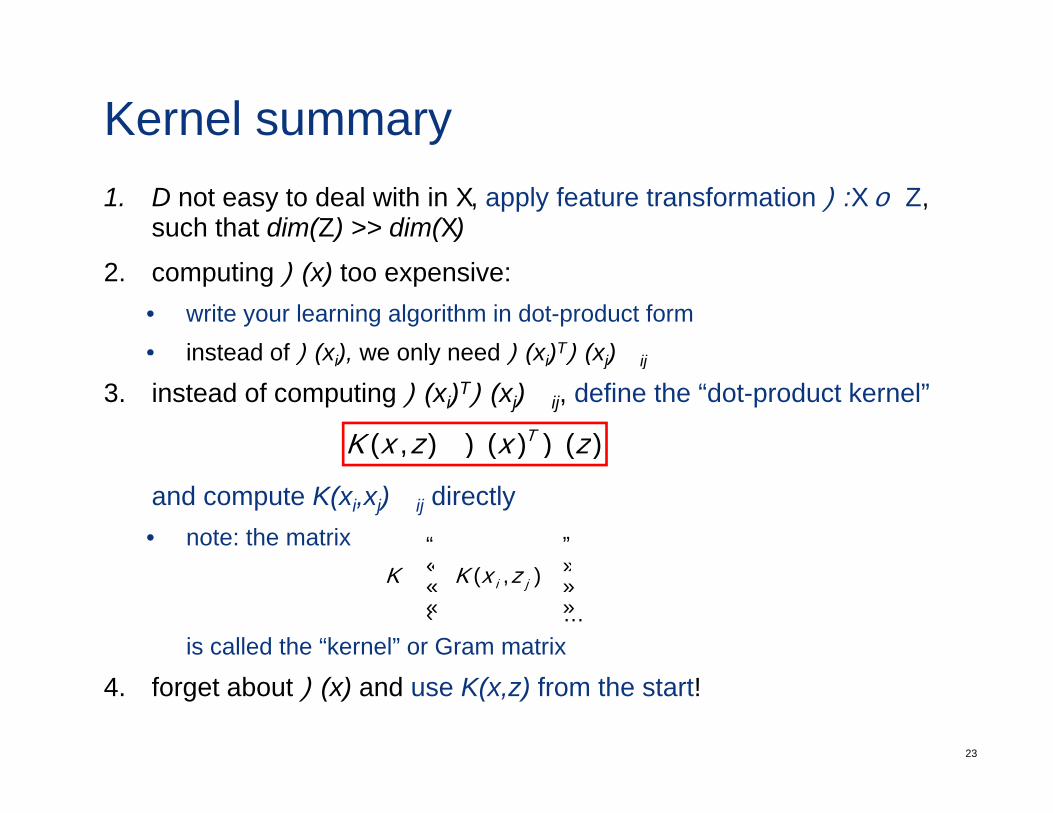
Kernel summary1. D not easy to deal with in X, apply feature transformation Φ:X → Z,
such that dim(Z) >> dim(X)
2. computing Φ(x) too expensive:• write your learning algorithm in dot-product form• instead of Φ(xi) we only need Φ(xi)TΦ(xj) ∀ijinstead of Φ(xi), we only need Φ(xi) Φ(xj) ∀ij
3. instead of computing Φ(xi)TΦ(xj) ∀ij, define the “dot-product kernel”
)()(),( zxzxK T ΦΦ=
and compute K(xi,xj) ∀ij directly• note: the matrix
)()()(
⎥⎤
⎢⎡ M
is called the “kernel” or Gram matrix
⎥⎥⎥
⎦⎢⎢⎢
⎣
=M
LL ),( ji zxKK
23
4. forget about Φ(x) and use K(x,z) from the start!
Questionwhat is a good dot-product kernel?• this is a difficult question (see Prof Lenckriet’s work)this is a difficult question (see Prof. Lenckriet s work)
in practice, the usual recipe is:• pick a kernel from a library of known kernelsp y• we have already met
• the linear kernel K(x,z) = xTz• the Gaussian family
σ
2
),(zx
ezxK−
−=
• the polynomial family
)(
( ) { }L,2,1,1),( ∈+= kzxzxK kT
24
( ) { },2,1,1),( ∈+ kzxzxK
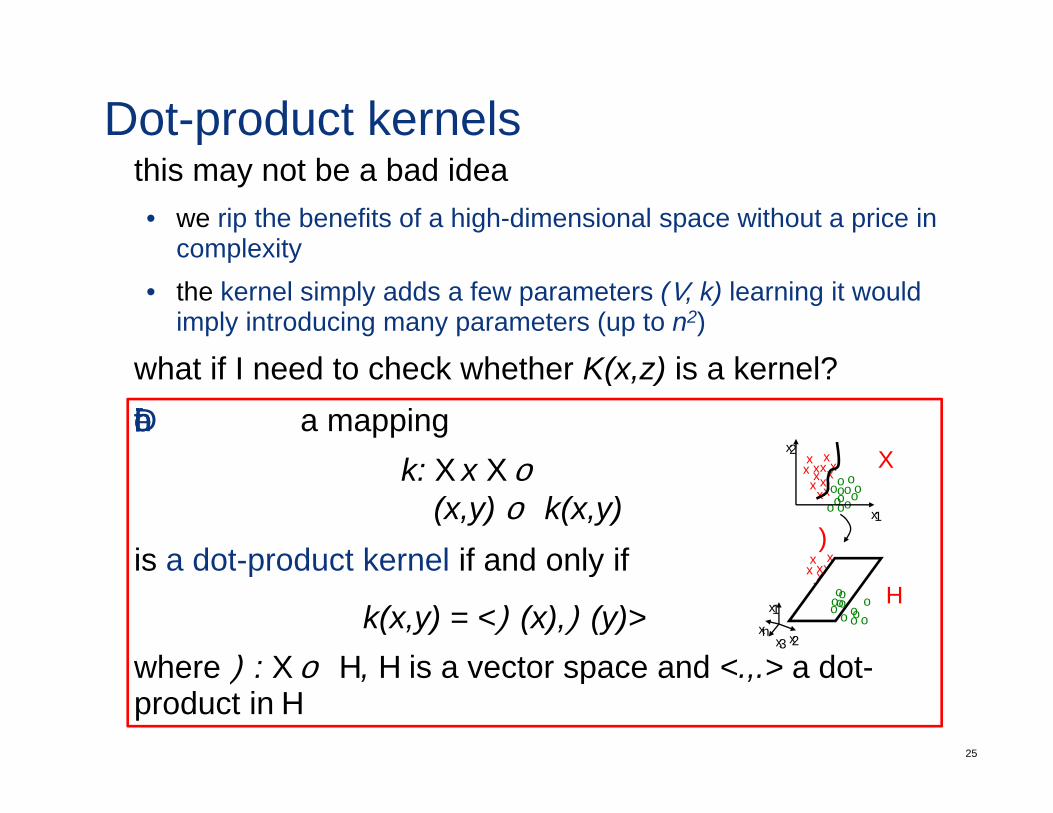
Dot-product kernelsthis may not be a bad idea• we rip the benefits of a high-dimensional space without a price in
complexitycomplexity• the kernel simply adds a few parameters (σ, k) learning it would
imply introducing many parameters (up to n2)
what if I need to check whether K(x,z) is a kernel? Definition: a mapping
k xxx2 Xk: X x X → ℜ
(x,y) → k(x,y)is a dot product kernel if and only if
xxx
xx
xxx
xxxx
ooo
ooooo
oooo
x1
xxΦ
X
is a dot-product kernel if and only if
k(x,y) = <Φ(x),Φ(y)>where Φ: X → H H is a vector space and < > a dot
xxx
xx
xxx
xxxx
oo o
ooo oo
o ooox1
x3 x2xn
H
25
where Φ: X → H, H is a vector space and <.,.> a dot-product in H

Positive definite matricesrecall that (e.g. Linear Algebra and Applications, Strang)
Definition: each of the following is a necessary andDefinition: each of the following is a necessary and sufficient condition for a real symmetric matrix A to be (semi) positive definite:
i) TA ≥ 0 0i) xTAx ≥ 0, ∀ x ≠ 0 ii) all eigenvalues of A satisfy λi ≥ 0iii) all upper-left submatrices Ak have non-negative determinanti ) there is a matri R ith independent ro s s ch thativ) there is a matrix R with independent rows such that
A = RTR
l ft b t iupper left submatrices:
L 322212
3,12,11,1
32,11,1
2111 ⎥⎥⎤
⎢⎢⎡
=⎥⎤
⎢⎡
== aaaaaa
Aaa
AaA
26
3,32,31,3
3,22,21,232,21,2
21,11
⎥⎥⎦⎢
⎢⎣
⎥⎦
⎢⎣ aaa
aa

Positive definite matricesproperty iv) is particularly interesting• in ℜ d <x x> = xTAx is a dot-product kernel if and only if A is• in ℜ , <x,x> = x Ax is a dot-product kernel if and only if A is
positive definite• from iv) this holds if and only if there is R such that A = RTR• hence
<x,y> = xTAy = (xR)T(Ry) = Φ(x)TΦ(y)with
Φ: ℜ d → ℜ d
x → Rx
i.e. the dot-product kernelp
k(x,z) = xTAz, (A positive definite)is the standard dot-product in the range space of the
27
is the standard dot product in the range space of the mapping Φ(x) = Rx

Positive definite kernelshow do I extend this notion of positive definiteness to functions?Definition: a function k(x,y) is a positive definite kernel on X xX if ∀ l and ∀ {x1, ..., xl}, xi∈ X, the Gram matrix
⎥⎥⎤
⎢⎢⎡
= LL
M
),( ji xxkK
is positive definite.
⎥⎥⎦⎢
⎢⎣ M
),( ji
plike in in ℜ d, this allows us to check that we have a positive definite kernel
28

Dot product kernelsTheorem: k(x,y), x,y∈ X, is a dot-product kernel if and only if it is a positive definite kernely pin summary, to check whether a kernel is a dot product:• check if the Gram matrix is positive definite • for all possible sequences {x1, ..., xl}, xi∈ X
does the kernel have to be a dot-product kernel?not necessarily. For example, neural networks can be seen as implementing kernels that are not of this typehhowever:• you loose the parallelism. what you know about the learning
machine may no longer hold after you kernelize
29
• dot-product kernels usually lead to convex learning problems. Usually you loose this guarantee for non dot-product

Clusteringso far, this is mostly theoreticalhow does it affect my algorithms?consider, for example, the k-means algorithm• 1) classification:
2) ti ti
2* minarg)( ii
xxi µ−=
• 2) re-estimation:
∑= ij
newi x )(1µ
can we kernelize the classification step?
∑j
jn
30

Clusteringwell, we saw that
T2 12
thi th b k li d i t
∑∑ +−=−jl
il
Tij
j
ij
Tkk
Tkik xx
nxx
nxxx )()(
2)(2 12 µ
this can then be kernelized into
( ) ( ) ( ) ( )∑ ΦΦ−ΦΦ=− ij
Tkk
Tkik xxxxx )(2 2µ ( ) ( ) ( ) ( )
( ) ( )∑
∑
ΦΦ+ il
Tij
jjkkkik
xx
n
)()(2
1
µ
( ) ( )∑jl
ljn 2
31

Clusteringfurthermore, this can be done with relative efficiency
( ) ( ) ( ) ( )∑ ΦΦΦΦ= iTT xxxxx )(2 2µ ( ) ( ) ( ) ( )
( ) ( )∑
∑
ΦΦ+
ΦΦ−ΦΦ=−
iTi
jjkkkik
xx
xxn
xxx
)()(1
µ
( ) ( )∑ ΦΦ+jl
lj xxn
)()(2
the assignment of the point only requires computing
kth diagonal entry of Gram matrix computed once per clusterwhen all points are assigned
( )2requires computing for each clusterthis is a sum of entries of Gram
( ) ( )∑ ΦΦj
ij
Tk xx
n)(2
32
this is a sum of entries of Grammatrix
Clusteringnote, however, that we cannot explicitly compute
1
thi i b bl i fi it di i l
( ) ( )∑Φ=Φj
iji x
n)(1µ
this is probably infinite dimensional...in any case, if we define
a Gram matrix K(i) for each cluster (dot products between points• a Gram matrix K(i) for each cluster (dot products between points in cluster)
• and S(i) the scaled sum of the entries in this matrix
( ) ( )∑ ΦΦ=jl
il
Tij
i xxn
S )()(2
)( 1
33
jl

Clusteringwe obtain the kernel k-means algorithm• 1) classification:1) classification:
( ) ( )⎥⎤⎢⎡
ΦΦ−+= ∑ ij
Tl
illl xxSKxi )()(* 2minarg)(
• 2) re-estimation: update
( ) ( )⎥⎦
⎢⎣
∑j
jllli
l n,g)(
) p
( ) ( )∑ ΦΦ=jl
il
Tij
i xxn
S )()(2
)( 1
but we no longer have access to the prototype for each cluster
jln
34

Clusteringwith the right kernel this can work significantly better than regular k-meansg
k-meanskernel
k-means
Φ
35
Clusteringbut for other applications, where the prototypes are important, this may be uselessp , ye.g. compression
we can try replacing the prototype by the closest vector, but this is not necessarily optimal
36

PCAwe saw that, to get PCA• 1) compute the dot-product matrix K• 2) compute its eigen-decomposition (Λ,Γ)
PCAth i i l t th i b Φ X Γ• the principal components are then given by Φ = XcΓ
• the eigenvalues are given by Λ2
• the projection of the data-points on the principal components isthe projection of the data points on the principal components is given by
Γ=Φ KX Tc
note that most of this holds when we kernelize, we only have to change the matrix K from xi
Txj to φ(xi)Tφ(xj)th l thi l th PC X
37
• the only thing we can no longer access are the PCs Φ = XcΓ

Kernel methodsmost learning algorithms can be kernelized• kernel PCAkernel PCA• kernel LDA• kernel ICA,• etc.
as in k-means, sometimes we loose some of the features of the original algorithmof the original algorithmbut the performance is frequently betternext week we will look at the canonical application thenext week we will look at the canonical application, the support vector machine
38

39















![arXiv:math/0205241v1 [math.CV] 23 May 2002arxiv.org/pdf/math/0205241.pdf · 2018. 6. 2. · of interpolation and sampling in Hilbert spaces of functions with reproducing kernels [SS61].](https://static.fdocument.org/doc/165x107/6078ef4cd30a2b255c7fd97d/arxivmath0205241v1-mathcv-23-may-2018-6-2-of-interpolation-and-sampling.jpg)


