Irina Goriatcheva - Stability Analysis of Companions Ups And
33
UNIVERSITY of CALIFORNIA SANTA CRUZ STABILITY ANALYSIS OF THE COMPANIONS OF υ ANDROMEDAE A thesis submitted in partial satisfaction of the requirements for the degree of BACHELOR OF SCIENCE in ASTROPHYSICS by Irina Goriatcheva 10 June 2012 The thesis of Irina Goriatcheva is approved by: Greg Laughlin Advisor Adriane Steinacker Theses Coordinator Michael Dine Chair, Department of Physics
-
Upload
irina-goriatcheva -
Category
Documents
-
view
116 -
download
3
Transcript of Irina Goriatcheva - Stability Analysis of Companions Ups And

UNIVERSITY of CALIFORNIA
SANTA CRUZ
STABILITY ANALYSIS OF THE COMPANIONS OF υANDROMEDAE
A thesis submitted in partial satisfaction of therequirements for the degree of
BACHELOR OF SCIENCE
in
ASTROPHYSICS
by
Irina Goriatcheva
10 June 2012
The thesis of Irina Goriatcheva is approved by:
Greg LaughlinAdvisor
Adriane SteinackerTheses Coordinator
Michael DineChair, Department of Physics

Copyright c© by
Irina Goriatcheva
2012

Abstract
Stability Analysis of the Companions of υ Andromedae
by
Irina Goriatcheva
We present a baseline analysis of the stability of the nominal best-fit υ Andromedae model as
presented in McArhur et al. (2010). We find that the nominal two-planet fit for υ Andromedae
becomes violently unstable after 357,000 years after the start of integration. To find a region of
stability for the proposed fit, we show that maximum masses required for a stable evolution for 1
Myr begin at 1.645 and 1.206 MJUP for υ And c and d, respectively, which are much lower than
the allowed minimum masses of 1.96 ± 0.05 and 4.33 ± 0.11 MJUP for the outer two planets.
Finally, we test 174 randomly selected configurations within the error range of the model presented
in McArthur et al. (2010) and find that all of these configurations resulted in violent instability
within 2.1 Myr since the start of integration. In addition to the study of the υ Andromedae system
that constitutes the primary result of this thesis, we also present a synopsis of preliminary work on
dynamical evolution of self-gravitating bodies. To this end, we develop a 4th order Runge-Kutta
N -body integrator with energy and angular momentum conservation tracking. Using the integrator,
we solve the Pythagorean 3-body problem and test for accuracy of the produced solution using a
parallel integration with half the specified time-step.

iv
Contents
List of Figures v
List of Tables vi
Dedication vii
1 Introduction 1
2 Orbital Dynamics 62.1 Orbital Elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2 McArthur et al. (2010) Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 Methods 103.1 Orbital Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1.1 Obtaining Cartesian Position and Velocity from Orbital Elements . . . . . . . 103.1.2 Jacobi Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4 Procedures 154.1 N -Body Integration and Preliminary Experiments . . . . . . . . . . . . . . . . . . . 15
4.1.1 Runge-Kutta 4th Order Method of Solving Ordinary Differential Equations . 154.2 Testing the McArthur et al. (2010) Model . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2.1 Nominal Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184.2.2 Reducing the Nominal Mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2.3 Stability Within the Error Range . . . . . . . . . . . . . . . . . . . . . . . . . 19
5 Results 205.1 Nominal Result . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205.2 Reduced Masses and Configurations Within the Error Range . . . . . . . . . . . . . 20
6 Summary and Conclusions 24
Bibliography 26

v
List of Figures
2.1 [Murray and Dermott (2000)] A description of an elliptical orbit positioned in thereference plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 A visual representation of an orbit with respect to a chosen reference plane [Murrayand Dermott (2000)] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 [McArthur et al. (2010)] Left: a view of the υ And c and d orbits projected on theplane of the sky. The darker circles indicate the portion of the orbit that is above theplane of the sky, while the light circles represent the portion that is below. The traceof the segments are proportional to the masses of the companions. Right: view of thetwo outer orbits projected on the orthogonal axis . . . . . . . . . . . . . . . . . . . . 9
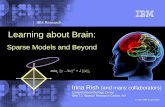
4.1 The trajectory of the solution to the three body Pythagorean problem. The blue,green, and red lines trace out the motion of bodies with masses of three, four, andfive, respectively. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.1 Graph of time vs. semi-major axis for the McArthur nominal astrometric fit for thetwo outer planets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.2 Graph of time vs. eccentricity for the nominal McArthur astrometric fit for the twoouter planets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
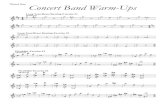
5.3 Plots of randomly selected values of the orbital parameters from within the errorrange provided in McArthur et al. (2010) that resulted in instability. Each valuewas individually modified one at a time and the modified parameter was input intothe nominal configuration which was then tested for stability. The circles representthe values of the randomly selected parameters while the solid triangle indicates thenominal fit for υ Andromedae . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23

vi
List of Tables
2.1 the values for the orbital elements given by McArthur et al. (2010). [1] TBJD =T − 2400000 JD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8

vii
To
my parents,
who moved countries for me,
and my grandfather,
who had to stay.

1
1 Introduction
In 1999, when the fourth grade class from Moscow, Idaho, was informed of the discovery of
the first multiple-planet system, which had recently been detected in orbit around a nearby star, υ
Andromedae, they enthusiastically suggested charming, intuitive names: Twopiter, Fourpiter, and
Dinky. After learning of the planets, the children wrote to Dr. Debra Fischer of San Francisco State
University, who was on the team that discovered the system, to say that they had arrived at this
conclusion through the use of paper plates as a scale model for the companions of υ Andromedae.
In their scheme, the planet orbiting υ Andromedae which was twice the mass of Jupiter was named
“Twopiter”, the one four times as massive was dubbed “Fourpiter”, and the third, lowest mass
member of the system was to be called “Dinky”.
Sadly, it now appears that the engaging names may no longer apply. Following a detailed
analysis of astrometric data taken with the Fine Guidance Sensor of the Hubble Space Telescope,
McArthur et al. (2010) report that the planetary masses are several times larger than previously
believed. The two outer planets might more appropriately be called Tenpiter and Fourteenpiter (no
update was given on the innermost planet, so presumably the name Dinky still holds). These rather
revisions, apart from being a mouthful, suggest that the first multiple planet system found orbiting
a nearby star is profoundly unlike our own solar system, and indeed, may not be a planetary system
at all. The massive υ Andromedae planets orbit at distances of 0.06, 0.8, and 2.5 that of the distance
from the Earth to the Sun, and the orbits of the outer two, which may, in fact be brown dwarfs
rather than planets, are significantly eccentric. In addition, the two outer bodies have a mutual

2
inclination, Φcd, of Φcd = 29o.917 ± 1o. Following the established convention, we will refer to the
companions of υ Andromedae as υ And b, c, and d.
Furthermore, the innermost planet in the υ Andromedae system was discovered in 1996,
using high precision radial velocity (RV) measurements. The McArthur et al. 2010 paper indicates
that, despite a decade of study, the configuration of its companions remains a mystery. Given that υ
Andromedae is the first non-pulsar multiple planet extrasolar system found orbiting a main sequence
star (Butler et al. 1999), its planetary orbits and masses are a matter of both scientific and historical
importance.
The motion of the companions of υ Andromedae are so strange and chaotic that the system
has been the focus of a great deal of attention over the years, and indeed, more effort has gone into
studying its dynamics than has been expended on any other extrasolar multiple planet system.
A brief recap of the research to date might run as follows: Shortly after its discovery, Laughlin
& Adams (1999) produced a study that allowed planet d deviate from a circle to the observed
eccentricity. They found that N -body interactions alone could not have altered the orbit into its
current eccentricity. It was also concluded that the system experienced chaotic evolution. Some
time later, Stepinski et al. (2000) found that the mutual angle of inclination, Φcd, of the two outer
orbits must be Φcd < 60o while the mean inclination relative to the plane of the sky, icd, must be
icd > 13o. Also, it was found that the difference between the arguments of pericenter of υ And c
and d librates around zero (Chiang et al. 2011). The orbits are thus compelled, over long periods
of time, to precess at the same rate around the star.
The unusually large eccentricities of the υ And system demand an explanation. Our own
Solar system houses planets in nearly circular orbits, and so it is startling that the planets in this
neighboring system have developed such high eccentricities. If we assume that planet formation arises
via disk accretion, then there is seemingly little reason for an orbit to deviate far from circularity.
According to the detailed analysis done by Ford et al. (2005), the companions of υ Andromedae
started out in nearly circular orbits (as expected if the planets evolved via accretion and coagulation

3
of the protostellar disk). Subsequent gravitational interactions with a fourth planet, which has been
ejected from the system, caused the eccentricity of υ And d to undergo a significant increase due
to their close encounter. The fourth planet was then ejected from the system and the gravitational
interactions of υ And d and υ And c have caused the second planet to evolve a higher eccentricity.
υ And b, however, is found to be in a near circular orbit that is much detached from the
chaotic behavior of the outer two companions. A study of the effects of general relativity performed
by Adams & Laughlin (2006) found that general relativity damps the maximum the eccentricity of
planet b bserved in a secular cycle from about 0.4 to 0.016. In addition, Lissauer & Rivera (2001)
discovered that the inner orbit is strongly detached from interactions with the other two.
The peculiar configuration of the outer two orbits makes the system very susceptible to
instabilities. If planets c and d are 13.98+2.3−5.3 MJUP and 10.25+0.7
−3.3 MJUP , respectively, in addition
to having a 29o.917± 1o mutual inclination angle (McArthur et al. 2010), then the system is likely
to be unstable. The angle of mutual inclination introduces a z-component for the motion, which is
very unusual for planetary orbits, and hence provides an avenue for instability that does not exist
in co-planar systems.
McArthur et al. used data from the high-cadence radial velocity (RV) measurements ob-
tained at the Hobby-Eberly Telescope, as well as the measurements from the Lick, Elodie, Harlan
J. Smith, and Whipple 60” telescopes. As mentioned above, they also used astrometric data from
the Hubble Space Telescope Fine Guidance Sensors to inform their derived fit for the υ Andromedae
system. The resulting system model (see Table 2.1) is driven largely by the astrometric data, and
suggests that the star is being pulled by planets whose orbits lie almost entirely in the plane of the
sky. Note that the McArthur et al. (2010) model of the system is based on the observed assumption
that that the astrocenteric variations are due solely to the planets’ gravitational pull on the star.
A reasonable working hypothesis is that the companions of υ Andromedae were initially
coplanar (Hubickyj 2010) and were later disturbed by some unknown phenomena or dynamical
interaction to produce high eccentricities and inclinations for planets c and d (Barnes et al. 2011).

4
In this thesis, we will explicitly test the stability of the orbital elements and the masses of υ And
c and d as presented by McArthur et al. The system will be considered stable if no ejections or
collisions occur during an appropriately long-term integration.
To test the presented model of the υ Andromedae system for long-term stability, we must
use numerical methods. Empirical solutions to the equations of motion exist only for the two body
problem, the solutions to which are conic sections (circles, ellipses, the parabola, and hyperbolae).
To solve for the evolution of the motion of three or more bodies, empirical solutions to which are
not known, numerical integrations must be performed. It is important to note that the nature of
the three body problem is chaotic, meaning that it is highly sensitive to initial conditions. This
phenomenon is more widely known as the “butterfly effect”, where a minimal variation in the initial
conditions causes a drastic difference in the long term behavior of the motion.
In order to investigate the sensitivity to initial conditions of the multiple-body problem,
we have developed an N -body integrator that uses the 4th order Runge-Kutta algorithm of solving
differential equations, and monitors energy and angular momentum conservation. To prove accuracy
of the solution, the code runs a parallel integration using a temporal half-step to check for convergence
of the two solutions. The three-body Pythogarean Problem was solved as a check of the accuracy of
the integrator. While using the N -body code, it was observed that, indeed, slight variation in the
initial conditions produced drastic differences in the orbital evolutions of the bodies.
In the next sections, we present a baseline analysis of the stability of the nominal best-fit υ
Andromedae planetary system model as presented by McArhur et al. (2010). From the analysis, the
system became unstable after 357,000 years since the start of integration. Furthermore, a systematic
decrease in mass was performed to establish maximum masses for the two outer companions, provided
that the rest of the McArthur elements presented were left unchanged. We found that the masses
had to be reduced to 1.645 MJUP and 1.206 MJUP for υ And c and υ And d, respectively, for the
system to remain stable for 1 Myr. In addition, values from within the error range of all the elements
and masses produced by McArthur et al. were randomly selected and tested for stability. We show

5
that out of 174 runs, all of the configuratioins went unstable whithin 2.1 Myr.
Because a stable solution resulted when the masses of the two outer planets were reduced to
values less than the minimum masses, M sin i, presented by McArthur et al. (which equal Mc sin ic =
1.96 ± 0.05 and Md sin id = 4.33 ± 0.11 Jupiter masses), it is likely that the actual masses of the
companions are much smaller than presented. In fact, the stable masses derived in this thesis suggest
that the names given by the fourth graders from Moscow, Idaho, may in fact be appropriate. In
addition, instabilities of the nominal solution, as well as the modified configurations with elements
selected from whithin the error presented by McArthur et al. (2010) call the model into question.
That we observe the planets orbiting a 2 Billion year-old star suggests that the configuration is
vastly less extreme than McArthur et al. (2010) have found.

6
2 Orbital Dynamics
2.1 Orbital Elements
Figure 2.1: [Murray and Dermott (2000)] A description of an elliptical orbit positioned in thereference plane
In order to understand the configuration of a planetary system, we begin with a description
of orbital parameters as well as the reference system for the orientation of an orbit relative to
a standard reference plane. We are interested in stable systems, thus we focus our attention on
elliptical orbits. The radius of an ellipse at any point is given by
r =a(1− e2)
1 + e cos f, (2.1)
where a is the semi-major axis of the ellipse, f , the true anomaly, is the angle between the orbiting

7
body and the pericenter (the point of closest approach of the ellipse to the focus), and e is the
eccentricity of the ellipse, which is defined to be
e ≡√
1− b2
a2. (2.2)
In defining e, we used the minor axis of the ellipse, 2b (Figure 2.1). For the initial conditions, we
assume elliptical orbits that have some eccentricity, e, and a semi-major axis, a. In addition to the
true anomaly, f , we must define the eccentric anomaly, E, which is obtained by drawing a normal
to a through the position of the body in the orbit. E is defined as the angle from the pericenter to
the intersection of the described line and a circle of radius a, or in terms of f :
cosE =e+ cos f
1 + e cos f. (2.3)
At this point in our model, we have a description of a Keplerian orbit lying in a reference plane. Next,
we need to tilt the orbit such that we can describe the trajectory with respect to a chosen reference
plane. To position an orbit in the correct spacial orientation, we perform a series of transformations:
Figure 2.2: A visual representation of an orbit with respect to a chosen reference plane [Murray andDermott (2000)]
We first rotate each orbit through a positive argument of pericenter, ω, with respect to
the Z-axis. This angle is the angle between the ascending node, the point where the orbit crosses

8
the reference plane from below to above, to the pericenter. Next, we incline the orbit by rotating
around the X-axis by the inclination, i, which is the angle between the general orbital plane and
the reference plane with the X-axis pointing in the reference direction. Finally, we rotate by the
longitude of the ascending node, Ω, about the Z-axis. This is the angle between the reference line and
the ascending node (Murray and Dermott 1999). The transformation angles are illustrated in Figure
2.2. Now that we have established the orientation of an orbit, we can analyze the configuration of
υ Andromedae as presented by McArthur et al.
2.2 McArthur et al. (2010) Model
McArthur et al. (2010)Orbital Parameters and Masses
υ And b υ And c υ And d
a (AU) 0.0594 ± 0.0003 0.829 ± 0.043 2.53 ± 0.014e 0.012 ± 0.005 0.245 ± 0.006 0.316 ± 0.006
P (days) 4.617111 ± 0.000014 240.9402 ± 0.047 1281.507 ± 1.055T [1] (days) 50034.053 ± 0.328 49922.532 ± 1.17 50059.382 ± 3.495i (deg) 7.868 ± 1.003 23.758 ± 1.316Ω (deg) 236.853 ± 7.528 4.073 ± 3.301ω (deg) 44.106 ± 25.561 247.659 ± 1.76 252.991 ± 1.311
mass (MJ) 13.98+2.3−5.3 10.25+0.7
−3.3
M sin i (MJ) 0.69 ± 0.016 1.96 ± 0.05 4.33 ± 0.11
Table 2.1: the values for the orbital elements given by McArthur et al. (2010). [1] TBJD =T − 2400000 JD
The McArthur et al. (2010) derived orbital elements and masses are listed in Table 2.1.
We note that the two outer massive planets, with masses of almost 14 and 10 MJUP , respectively,
have unusually high eccentricities, and lie almost entirely in the plane of the sky. The orbital
configuration is shown in Figure 2.3. It is also important to mention that the two outer planets
have a reported mutual inclination, Φcd = 29.917o ± 1o, which, apart from being unusually large,
immediately introduces the potential for a Z-instability into the system. In addition, the minimum
possible masses with unknown inclination for υ And c and d are 1.96 ± 0.05 and 4.33 ± 0.11 MJUP ,

9
respectively, which closely correspond to the “Twopiter” and “Fourpiter” model introduced in the
beginning of this thesis. The mass, inclination, and the longitude of the ascending node of υ And b
were not provided in the paper. McArthur et al. reported that this model evolved regularly for 100
Myr.
Figure 2.3: [McArthur et al. (2010)] Left: a view of the υ And c and d orbits projected on the planeof the sky. The darker circles indicate the portion of the orbit that is above the plane of the sky,while the light circles represent the portion that is below. The trace of the segments are proportionalto the masses of the companions. Right: view of the two outer orbits projected on the orthogonalaxis

10
3 Methods
3.1 Orbital Parameters
Ambiguities occasionally occur in definitions of orbital elements. For example, inclination
can be defined in reference to the plane of the sky or the line of sight. When such ambiguities occur,
it is helpful to fall back on concrete definitions. To be confident that the interpretation of the orbital
elements is unambiguous, we developed a routine to convert orbital elements to cartesian positions
and velocities using explicit definitions for orbital parameters.
3.1.1 Obtaining Cartesian Position and Velocity from Orbital Elements
We begin our routine assuming that we are equipped with knowledge of a, e, masses of the
star and planet, M∗ andMp, the time at which the given parameters are relevant, tstart, and the
time of the pericenter passage, Tperi. We start with an orbit that lies in the plane of the sky. First,
we define the mean anomaly
M = n(tstart − Tperi) , (3.1)
where n is the mean motion defined as 2πP where P is the period of the planet found by using Kepler’s
Third law:
P 2 =4π2
G(M∗ +Mp)a3 . (3.2)

11
Here, G is the gravitational constant. Next, we want to obtain the value for the eccentric anomaly,
E, by using
M = E − e sinE . (3.3)
In order to obtain a value for E, we carry out a simple iterative procedure until the value of E
converges:
Ei+1 = M + e sinEi , (3.4)
where E0 = M . Now that we have determined E, we can calculate the values for the cartesian
position coordinates:
x = a(cosE − e) , (3.5)
as well as
y = a√
1− e2 sinE . (3.6)
Next, we define the true anomaly, f , as
f = 2 arctan(
√1 + e
1− etan
E
2) . (3.7)
Using the true anomaly, we can find the cartesian velocity vectors
x = − 2πa
P√
1− e2sin f , (3.8)
and
y =2πa
P√
1− e2(e+ cos f) . (3.9)
We now have successfully constructed an orbit in terms of cartesian positions and velocities
relative to the reference plane. Next, we must rotate our cartesian vectors such that the orbit is in
the correct spacial orientation.
Right now, the orbit plane is normal to the specific angular momentum vector, j = x× v.
To orient the orbit such that it lies in an orientation demanded by the orbital elements Ω, i, and

12
ω, we rotate x = (x, y, z), v = (x, y, z), and z = (0, 0, 1) through an angle i about the axis,
Ω = (cos Ω, sin Ω, 0), which is defined as the line of nodes of the orbit. In to order rotate x into the
true orbital plane, we perform
x′
y′
z′
=
cos i+ cos2 Ω(1− cos i) cos Ω sin Ω(1− cos i) sin Ω sin i
sin Ω sin Ω(1− cos i) cos i+ sin2 Ω(1− cos i) − cos Ω sin i
− sin Ω sin i cos Ω sin i cos i
(3.10)
where x′ = (x′, y′, z′) is the position vector in the true orbital plane. Similar rotations are done to
v and z to obtain v′ and z′, respectively. This transformation also outputs the updated pericenter
direction, x′.
Our next step is to get the correct orbital orientation by rotating the new pericenter
direction, x′, by an amount $ about the z′ - axis (where $ is defined to be $ = Ω +ω) . This way,
we can account for the Ω and ω rotations to get the right angle between the reference line and the
ascending node. Thus, we transform x′ by the rotation matrix, R :
R =
cos$ + z′2x (1− cos$) z′xz
′y(1− cos$)− z′z sin$ z′xz
′z(1− cos$) + z′y sin$
z′yz′x(1− cos$) + z′z sin$ cos$ + z′2y (1− cos$) z′yz
′z(1− cos$)− z′x sin$
z′zz′x(1− cos$)− z′y sin$ z′zz
′y(1− cos$) + z′x sin$ cos + z′2z (1− cos$)
(3.11)
where z′ = (z′x, z′y, z′z). As before, similar transformations are performed on v′ and x′ to obtain v′′
and x′′, respectively. These resulting cartesian vectors have the specified e, M , Ω, i, and ω. Thus,
x′′ and v′′ describe the correctly oriented orbit and define the motion of the planet relative to the
central star. As a check to confirm that proper transformations were performed we find that
sgn[(Ω× x′′) · z′] arccos(Ω · x′′) ∈ (−π, π] (3.12)
was true for the above series of transformations.

13
3.1.2 Jacobi Coordinates
The cartesian positions and velocities obtained from the appropriate transformations of
the orbital elements listed in McArthur et. al (2010) may be converted into Jacobi coordinates for
the three orbiting planets. Jacobi coordinates are used to simplify mathematical formulation and
often times provide more natural and also stable description of the system. This process builds a
“binary tree” model to connect the orbiting bodies via the preceding barycenter of the system. The
transformation to Jacobi coordinates is accomplished using the following prescription:
The center of mass for each orbiting body is calculated using
Ri =1
Mi
i∑j=0
mjrj , (3.13)
with
Mi =
i∑j=0
mj , (3.14)
where ri is the vector from the origin to the ith body. When converting to Jacobi coordinates we
assign the fist Jacobian vector to the position vector of the mass of the entire system,
r0 = RN−1 , (3.15)
where N is the number of bodies in the system (including the central star). When looking at the
υ Andromedae system, the fist Jacobi vector corresponds to R2. The remaining Jacobian position
vectors become
ri = ri −Ri−1 , (3.16)
where ri is the vector denoting the position of the ith mass with respect to the center of mass vector
Ri−1 .
To have the same origin for each position vector, we subtract the center of mass vectors
from the Jacobi coordinates, such that the new position vector, r′, describes the Jacobi vectors of
each body with respect to one origin:

14
r′i = ri + Ri . (3.17)
The same analysis was done to obtain the Jacobi coordinates of the velocity vectors by
integrating equations 3.13 and 3.15 with respect to time. Once the Jacobi positions and velocities
were obtained, the values for r′i and v′i were loaded into the integrator and a long-term stability
analysis of the system was performed.

15
4 Procedures
4.1 N-Body Integration and Preliminary Experiments
When examining the evolution of multiple body systems, we must note that an analytic
solution exists only for the two body problem, where the allowed orbits are all conic sections.
When three or more bodies are involved, numerical integrations are required to obtain the dynamic
evolution of the system. Due to the chaotic evolution of planetary orbits, the long-term behavior is
highly dependent on initial conditions (a concept widely known as the ”butterfly effect”). Therefore,
slight variations in the initial conditions cause vast divergences in the outcome of the integration.
4.1.1 Runge-Kutta 4th Order Method of Solving Ordinary Differential
Equations
The unpredictable and vastly complicated motion of many massive bodies that arise in
orbital dynamics are governed by Newton’s 2nd law. In its elegant and simple form, the law tells us
that the force between two massive bodies is governed by
F1 = m1r = −Gm1m2
r2, (4.1)
where F1 is the force on body 1, m1 andm2 are the masses of the two bodies and r is the distance from
the centers of the two bodies. For a system of N bodies, we consider the gravitational contribution
from each neighboring mass, and find that the force on a given body of mass mi is the sum of all

16
the forces involved in the system acting on mi given by
Fij =
N−1∑j=1
−Gmimj
r2ij
, (4.2)
where rij is the distance between the centers of mi and mj . To model the long-term evolution of a
three-body problem, we numerically solve equation 4.2 via a high-accuracy integration.
Equation 4.2 is a second order differential equation with constant coefficients, which may
be reduced to a series of coupled first order differential equations. To do so, we note that
x = v , (4.3)
where x = (x, y, z) and v = (vx, vy, vz). Reducing equation 4.2 to a first order differential equation
we obtain
v = −N−1∑j=1
Gmj
r2ij
. (4.4)
To get the trajectory of the orbiting bodies, we must solve the system composed of equations
4.3 and 4.4. To do so, we organize the position and velocity components into an array given by
C = [x0,v0,x1,v1,x2,v2, ...,xN−1,vN−1] , (4.5)
and allow this vector to run through the 4th order Runge-Kutta method for solving differential
equations. We start out with defining
k1 =dCi
dt, (4.6)
such that the derivative solves equations 4.3 and 4.4 for x and v, respectively. We then proceed
with the Runge-Kutta algorithm:
b1 = Ci + k1∆t
2, (4.7)
k2 =db1
dt, (4.8)
b2 = Ci + k2∆t
2, (4.9)
k2 =db2
dt, (4.10)
b3 = Ci + k3∆t , (4.11)

17
k4 =db3
dt, (4.12)
so that we obtain the value for Ci+1 via the expression
Ci+1 = Ci +∆t
6(k1 + 2k2 + 2k3 + k4) . (4.13)
This procedure can be repeated indefinitely to get the full solution for an N -body problem.
As an additional check, the energy and angular momentum conservation were monitored
during the integration, specifically with respect to close encounters. The fractional change in energy
and angular momentum was required to be at a minimum to provide the correct solution.
Figure 4.1: The trajectory of the solution to the three body Pythagorean problem. The blue, green,and red lines trace out the motion of bodies with masses of three, four, and five, respectively.
As a numerical check, we integrated the Pythogarean 3 body problem where the Pythog-
arean 3, 4, 5, traingle was set up such that on the vertex opposite of side of length 3, a point mass

18
of mass 3 was placed. Likewise point masses of mass 4 and 5 were placed at the vertices opposite of
sides 4 and 5, respectively. To confirm the accuracy of the solution, a parallel integration was run
using a time-step of ∆t2 . The difference between the two solutions was was found to be minimal as
the integrations drew the same trajectory of the moving bodies to within a resolution element on
the display. Thus, the accuracy of our result to the degree required by the problem was confirmed
(see Figure 4.1).
4.2 Testing the McArthur et al. (2010) Model
4.2.1 Nominal Solution
The orbital elements of the two outer planets were converted into the cartesian position and
velocity components and loaded into the integrator. Because the mass, inclination, and longitude
of the ascending node were missing from the McArthur et al. data, and because of the “detached”
nature of υ And b, as well as the drastic reduction in the computational burden, the first planet
was not included in the integration. By using a two planet model, we can carry out more extensive
parameter studies.
Using the routine for converting from orbital elements to cartesian position and velocities
(which are outlined in Section 3.1.1), we transformed the results derived by McArhtur et al. into
cartesian values to avoid ambiguities due to variations in definitions of orbital elements (specifically
variations in the definition of inclination). The cartesian vectors were then tested for stability using
an N -body Bulirsh-Stoer integrator which was configured to have an 1.0e-13 individual timestep
accuracy for Bulirsch-Stoer. The system was considered unstable if the eccentricity of one or more
planets rapidly approached 1 or if there was a sharp increase in a such the resulting a is more than
1.25 times greater than the value at the start of the integration. All integrations for υ Andromedae
configurations had a common starting epoch at 240000 JD.

19
4.2.2 Reducing the Nominal Mass
Provided that the nominal solution was unstable, the mass was systematically reduced to
identify the range when a reduction in the masses resulted in a drastically less chaotic evolution of
the system. For this procedure, instability was considered to occur when the semi-major axis, a,
exceeded 5% change in a at the start of the integration. This relatively strict definition of instability
was enforced because drastic changes in a will occur at exponentially later time when masses are
systematically reduced. To avoid using unnecessary computer time to observe vast variations in a,
we restricted the definition of instability, as our overall goal is to determine the masses at which the
evolution is no longer violently unstable.
We perform integrations using the reduced masses for 1 Million years and monitor the
decrease in the chaotic behavior of e. When mass reduction yields a oscillating evolution of the
eccentricities we consider the resulting configuration as stable.
4.2.3 Stability Within the Error Range
For completeness of our stability analysis, we test values provided within the error range of
the model by McArhur et al. We modify one of the elements provided and replace it by a randomly
selected value that is within the error range determined by McArhur et al. We test the modified
configuration for stability for 1Myr. The stable results will be tested for longer to determine the
time at which a exceeds a change of 25% of the initial value. For this analysis, 174 runs were carried
out using configurations with randomly modified elements that were within the error range.

20
5 Results
5.1 Nominal Result
With the starting epoch of the integration chosen to be 240000 Julian Days, a long-term
integration of the orbital parameters was performed. The results of the nominal integration showed
that system participated in a dynamically active trajectory for 357,000 years following the starting
epoch. The behavior of the planets then became violently unstable, and as a consequence, the
eccentricity of planet d approached unity (Figure 5.2). In addition, the semi-major axis increased to
over 10 AU (Figure 5.1) which resulted in the ejection planet d. This behavior is very characteristic
of an unstable configuration - the system experiences a relatively short period of stability during
which the eccentricities display an evolution suggestive of orbital resonance. Eventually, repeated
planet interaction causes the orbits to become unstable and result in an ejection of a planet or a
collision between two bodies. With an ejection of a planet d, the system is declared manifestly
unstable, and the integration is halted.
5.2 Reduced Masses and Configurations Within the Error
Range
Since the nominal configuration resulted a violent instability, the masses at which the
McArthur et al. orbital model remained in a stable configuration were called to be determined. To

21
Figure 5.1: Graph of time vs. semi-major axis for the McArthur nominal astrometric fit for the twoouter planets
Figure 5.2: Graph of time vs. eccentricity for the nominal McArthur astrometric fit for the twoouter planets
find a stable configuration, we systematically decreased the masses of υ and c and d to 1.645 MJUP
and 1.206 MJUP , respectively. These masses were the maximum masses that yielded smooth, stable
evolution of the eccentricity, and, as a consequence, the semi-major axis, for 1 Myr.

22
In addition to the nominal result, 174 configurations (which included a modified parameter
that was within the range of error provided in McArthur et al. (2010)) were tested for stability. The
randomly selected parameters that were included in the stability analysis can be found in Figures
5.3.
These results are shown for an assumption that an instability is considered to be a 25%
change in the semi-major axis. A much tighter definition of instability would have sufficed with only
a 5% change in the semi-major axis. If this definition of instability was adopted, the systems that
we have tested would have gone unstable much earlier in the integration than we have allowed for.
This suggests that even with our liberal definition of instability that allows much room for change
in the semi-major axis and eccentricities, the system still went unstable within only 1 Myr.

23
2.515
2.52
2.525
2.53
2.535
2.54
2.545
0.79 0.8 0.81 0.82 0.83 0.84 0.85 0.86
a d (A
U)
ac (AU)
0.31
0.312
0.314
0.316
0.318
0.32
0.322
0.237 0.24 0.243 0.246 0.249 0.252
e d
ec
1280.6 1280.8
1281 1281.2 1281.4 1281.6 1281.8
1282 1282.2 1282.4 1282.6
240.875 240.9 240.925 240.95 240.975 241
P d (d
ays)
Pc (days)
50056
50057
50058
50059
50060
50061
50062
50063
49921.5 49922 49922.5 49923 49923.5 49924
T d (d
ays)
Tc (days)
22.5
23
23.5
24
24.5
25
6.5 7 7.5 8 8.5 9
i d
ic
251
252
253
254
255
245 246 247 248 249 250
!2 (
degr
ees)
!1 (degrees)
0
1
2
3
4
5
6
7
230 232 234 236 238 240 242 244
!2 (
degr
ees)
!1 (degrees)
7
8
9
10
11
9 10 11 12 13 14 15 16
Md (
MJU
P)
Mc (MJUP)
Figure 5.3: Plots of randomly selected values of the orbital parameters from within the error rangeprovided in McArthur et al. (2010) that resulted in instability. Each value was individually modifiedone at a time and the modified parameter was input into the nominal configuration which was thentested for stability. The circles represent the values of the randomly selected parameters while thesolid triangle indicates the nominal fit for υ Andromedae

24
6 Summary and Conclusions
In this thesis, we have adopted the orbital model derived by McArthur et al. (2010). We
converted their reported orbital elements to cartesian position and velocities using a Jacobian scheme
and integrated the system starting at 240000 JD. From the results of the integration, it was shown
that the model presented by McArthur et al. became dramatically unstable 357,000 years after the
start of the integration.
In addition, the minimum masses required to produce a significant decrease in the violence
of the stability of the system for 2 Myr years were 1.645 MJUP and 1.206 MJUP , respectively, which
were 16.1% and 72.1% smaller than the allowed minimum masses, M sin i, of 1.96 ± 0.05 and 4.33
± 0.11 MJUP for υ And c and d, respectively. The M sin i measurements provide a cap on the
minimum allowed masses, yet our integrations demonstrated that the maximum mass required for
stability using the proposed orbital elements are less than the M sin i measurements. This important
inconsistency suggests that the orbital elements of the system, particularly e and i, are vastly less
exotic than proposed by McArthur et al. The large eccentricities provice more opportunity for
planet-planet orbital perturbations if the periods are not in resonance. In addition, the odds for
instability would be greatly reduced by eliminating the allowed Z-instability induced by the nonzero
Φcd in the McArhtur et al. model. Thus, it is most probable that the eccentricities of the outer two
plants as well as Φcd are significantly smaller than the values put forth by McArthur et al.
It is possible that some of the astrometric signal that McArthur et al. employed to derive
their fit may not be due to orbiting planets. The signal, for example, may be due to bodies outside of

25
the υ Andromedae system. Other possible sources of the observed positional changes of the star on
the sky may be due to jitter, or systematic errors arising from inadequate removal of the constant
trajectory of the center of mass of the system. Astrometry, which requires careful attention and
construction of a reference grid of comparison stars, is notoriously difficult to carry out when one
requires cutting-edge percision. At this point, we believe that a further analysis is warranted in
order to establish that the signals are, in fact, due to orbiting planets.
It has been over a decade since the discovery of the υ And system. With more attention
devoted to this unusual configuration of planets than any other multi-planet system, the naive
expectations would be that a stable configuration that agrees with the data would have been long
since established. Yet the system still remains a mystery. More work is required to sort out what is
actually going on, and the fourth graders from Moscow, Idaho, many of whom are now likely college
graduates, like myself, can only hope that it will look remotely like our own!

26
Bibliography
[1] Adams, F. C., & Laughlin, G. 2006, ApJ, 649, 992
[2] Barnes, R., Greenberg, R., Quinn, T. R., McArthur, B. E., Fritz Benedict, G. 2011, ApJ, 726,
71
[3] Butler, R. P., Marcy, G. W., Fischer, D. A., Brown, T. M., Contos, A. R., Korzennik, S. G.,
Nisenson, P., & Noyes, R. W. 1999, ApJ, 526, 916
[4] Chiang, E. I., Tabachnik, S., & Tremaine, S. 2001, AJ, 1607, 1607
[5] Ford, D. A., Lystad, V., & Rasio, F. A. 2005, Nature, 434, 873
[6] Hubickyj, O. 2010, in Formation and Evolution of Exoplanets, ed. R. Barnes (Berlin: Wiley-
VCH), 101
[7] Laughlin, G., & Adams, F. 1999, ApJ, 526, 881
[8] Lissauer, J. J., & Rivera, E. J. 2001, ApJ, 554, 1141
[9] McArthur, B. E., Benedict, G. F., Barnes, R., Martioli, E., Korzennik, S., Nelan, E., & Butler,
R. P. 2010, ApJ, 715, 1213
[10] Murray, C. D. & Dermott, S. F. 2000, Solar System Dynamics, ed. Murray, C. D. & Dermott,
S. F.
[11] Stepinski, T. F., Malhorta, R., & Black, D. C. 2000, ApJ, 545, 1044