Invariant surfaces in $\widetilde{PSL}$2(ℝ, τ) and applications
34
Bull Braz Math Soc, New Series 43(4), 545-578 © 2012, Sociedade Brasileira de Matemática Invariant surfaces in PSL 2 (R,τ) and applications Carlos Peñafiel* Abstract. We study the geometric behavior of constant mean curvature surfaces in- variant by one-parameter group of isometries immersed in PSL 2 (R,τ). We give explicit examples of such surfaces. Also we give a half-space theorem for H = 1/2-rotational surfaces. Keywords: constant mean curvature, invariant surfaces, one-parameter group of isometries, catenoid, half-space theorem. Mathematical subject classification: 53A35. 1 Introduction It has been growing interest in the study of surfaces having constant mean curva- ture (CMC-surfaces) in Riemannian homogeneous 3-manifolds. This was moti- vated by the discovery due to Abresch and Rosenberg of a certain Hopf differ- ential which is holomorphic on every CMC-surfaces (see [1]). Indeed the classification of homogeneous 3-manifold is well-known. Such a manifold has an isometry group of dimension 3, 4 or 6. When the manifold has 6-dimensional isometry group, we have the 3-dimensional space-forms. When the manifold has 3-dimensional isometry group, we have the Lie group Sol 3 . When the manifold has 4-dimensional isometry group (we labeled by E (κ,τ) these manifolds), there exists a Riemannian fibration over a 2-dimensional space form M 2 (κ). The manifolds E (κ,τ) are classified, up to isometry, by the curvature κ of the base surface and by the bundle curvature of the fibration τ , where κ and τ can be any real numbers satisfying κ = 4τ 2 . When τ ≡ 0 we have the metric product spaces M 2 (κ) × R, in this case there exists a complete study of the behavior geometric of the surfaces invariant by one-parameter group of isometries of the Received 9 December 2011. *The author was supported by FAPERJ – Brasil.
-
Upload
carlos-penafiel -
Category
Documents
-
view
214 -
download
1
Transcript of Invariant surfaces in $\widetilde{PSL}$2(ℝ, τ) and applications

Bull Braz Math Soc, New Series 43(4), 545-578© 2012, Sociedade Brasileira de Matemática
Invariant surfaces in P SL2(R, τ ) and applications
Carlos Peñafiel*
Abstract. We study the geometric behavior of constant mean curvature surfaces in-
variant by one-parameter group of isometries immersed in P SL2(R, τ ).We give explicitexamples of such surfaces. Also we give a half-space theorem for H = 1/2-rotationalsurfaces.
Keywords: constant mean curvature, invariant surfaces, one-parameter group ofisometries, catenoid, half-space theorem.
Mathematical subject classification: 53A35.
1 Introduction
It has been growing interest in the study of surfaces having constant mean curva-ture (CMC-surfaces) in Riemannian homogeneous 3-manifolds. This was moti-vated by the discovery due to Abresch and Rosenberg of a certain Hopf differ-ential which is holomorphic on every CMC-surfaces (see [1]).Indeed the classification of homogeneous 3-manifold is well-known. Such a
manifold has an isometry group of dimension 3, 4 or 6. When the manifold has6-dimensional isometry group, we have the 3-dimensional space-forms. Whenthe manifold has 3-dimensional isometry group, we have the Lie group Sol3.When the manifold has 4-dimensional isometry group (we labeled by E(κ, τ )these manifolds), there exists a Riemannian fibration over a 2-dimensional spaceform M2(κ).The manifolds E(κ, τ ) are classified, up to isometry, by the curvature κ of the
base surface and by the bundle curvature of the fibration τ , where κ and τ can beany real numbers satisfying κ �= 4τ 2. When τ ≡ 0 we have the metric productspaces M2(κ) × R, in this case there exists a complete study of the behaviorgeometric of the surfaces invariant by one-parameter group of isometries of the
Received 9 December 2011.*The author was supported by FAPERJ – Brasil.

546 CARLOS PEÑAFIEL
ambient space, for instance see [6, 7, 10]. When κ ≡ 0 and τ �= 0 we havethe 3-dimensional Heisenberg group, in this case a complete study of invariantsurfaces is given in [3].
The space P SL2(R, τ ) is given when we consider τ �= 0 and κ ≡ −1, that isE(−1, τ ) = P SL2(R, τ ).In this paper we study the geometric behavior of H -surfaces (surfaces having
constant mean curvature H ) and minimal surfaces, immersed in P SL2(R, τ )which are invariant by one-parameter group of isometries (see Proposition 3.6,Theorem 3.14, Theorem 3.17, Theorem 4.6). We give explicit examples of suchsurfaces as well as some applications (Theorem 3.21).
2 The space P SL2(R, τ )
There exists a Riemmanian submersion π : P SL2(R, τ ) −→ M2, where M2 isthe 2-dimensional hyperbolic space. The fibers are geodesic and there exists aone-parameter family of translation along the fibers generated by a Killing fieldE3 called the vertical field.In Euclidean coordinates the space P SL2(R, τ ) is given by:
P SL2(R, τ ) ={(x, y, t) ∈ R3; (x, y) ∈ M2, t ∈ R}
endowed with metric,
g := ds2 = λ2(dx2 + dy2)+(2τ
(λy
λdx − λx
λdy)+ dt
)2,
where, either
λ = 2
1− (x2 + y2) or λ = 1
y, (2.1)
depending if we are taking the disk model or the half-plane model for thehyperbolic space M2 respectively. Here E3 = ∂t .
2.1 Isometries in P SL2(R, τ )
Identifying the Euclidean space R2 with the set of complex numbers C andtaking the disk model for M2, we have,
P SL2(R, τ ) ={(z, t) ∈ R3; |z| = x2 + y2 < 1, t ∈ R},
endowed with metric,
dσ 2 = λ2(z)|dz|2 + (iτλ(zdz − zdz)+ dt)2.Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 547
Let F an isometry of P SL2(R, τ ), since π : P SL2(R, τ ) −→ M2 is aRiemannian submersion, then the horizontal component π ◦ F is an isometryof M2, so
F(z, t) = ( f (z), h(z, t))
where, f is an isometry of M2. The isometries of P SL2(R, τ ) are given in thefollowing proposition.
Proposition 2.1. [11, Theorem 9]. The isometries of P SL2(R, τ ) are given by,
In the half-plane model for the hyperbolic space M2
F(z, t) = ( f (z), t − 2τ arg f ′ + c)or
G(z, t) = (− f (z),−t + 2τ arg f ′ + c)where f is a positive isometry of H2 and c is a real number.
In the disk model,
F(z, t) = ( f (z), t − 2τ arg f ′ + c)or
G(z, t) = ( f (z),−t + 2τ arg f ′ + c)where f is a positive isometry of D2 and c is a real number.
Proof. Wewill consider the half-plane model for the hyperbolic space M2, the
proof for the disk model is analogous. As F is an isometry of P SL2(R, τ ), wemust have,
F∗ (λ2(z)|dz|2 + (−τλ(z)(dz + dz)+ dt)2)= λ2(z)|dz|2 + (−τλ(z)(dz + dz)+ dt)2
since thatf ∗(λ2|dz|2) = λ2(z)|dz|2
we have
F∗(−τλ(z)(dz + dz)+ dt) = ±(−τλ(z)(dz + dz)+ dt).We suppose first that
F∗(−τλ(z)(dz + dz)+ dt) = +(−τλ(z)(dz + dz)+ dt). (2.2)
Bull Braz Math Soc, Vol. 43, N. 4, 2012

548 CARLOS PEÑAFIEL
If f is a positive isometry of H2, then
(2.2) ⇔ −τλ( f (z))(d f (z)+ d f (z))+ dh= −τλ(z)(dz + dz)+ dt
⇔ −τλ( f (z))( f ′dz + f ′dz)+ dh= −τλ(z)(dz + dz)+ dt
⇔ −τλ( f (z))( f ′dz + f ′dz)+ hzdz + hzdz + htdt= −τλ(z)(dz + dz)+ dt
⇔⎧⎨⎩
−τλ( f (z)) f ′ + hz = −τλ(z);−τλ( f (z)) f ′ + hz = −τλ(z);ht = 1;
⇔{ −τλ( f (z)) f ′ + hz = −τλ(z);ht = 1.
Consequently, h is a function of the form h(z, t) = ϕ(z) + t , where ϕ is a realfunction that verifies
ϕz(z) = τ(λ( f (z)) f ′ − λ(z))
= τ
[2i f ′
f − f− 2iz − z
]= 2τ i[log( f − f )− log(z − z)]z
⇔ ϕ = 2τ i log(f − fz − z
)+ ψ
where ψ is a holomorphic function. On other hand, if f is a positive isometryof H2, then
f (z) = az + bcz + d , a, b, c, d ∈ R, ad − bc = 1.
A simple computation gives
f − fz − z = 1
|cz + d|2 = | f ′(z)|
so we obtainϕ = 2τ i arg | f ′(z)| + ψ
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 549
as ψ is holomorphic and ϕ is a real function, we must have
ψ = 2τ i log( f ′)+ cwhere c is a constant real. So we conclude that
ϕ = −2τ arg( f ′(z))+ c.Thus
h(z, t) = t − 2τ arg( f ′(z))+ c.Now let f be a negative isometry, that is f = −g where g is a positive
isometry of H2. Thus, we have,
(2.2) ⇔ −τλ( f (z))(d f (z)+ d f (z))+ dh= −τλ(z)(dz + dz)+ dt
⇔ τλ( f (z))(dg(z)+ dg(z))+ dh= −τλ(z)(dz + dz)+ dt
⇔ τλ( f (z))(g′dz + g′dz)+ hzdz + hzdz + htdt= −τλ(z)(dz + dz)+ dt
⇔⎧⎨⎩
τλ( f (z))g′ + hz = −τλ(z);τλ( f (z))g′ + hz = −τλ(z);ht = 1;
⇔{
τλ( f (z))g′ + hz = −τλ(z);ht = 1.
Again h is of the form h(z, t) = ϕ(z)+ t , where ϕ is a real function that verifiesϕz = −τ(λ( f (z))g′ + λ(z))
= −τ
[2ig′
g − g + 2iz − z
]= −2τ i [log(g − g)+ log(z − z)]z
soϕ = −2τ i[log(g − g)+ log(z − z)] + ψ
whereψ is holomorphic. Since ϕ is real, this implies that [log(g−g)+log(z−z)]is harmonic, which is false. Thus f must be a positive isometry.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

550 CARLOS PEÑAFIEL
Now, when F verifies
F∗(−τλ(z)(dz + dz)+ dt) = −(−τλ(z)(dz + dz)+ dt) (2.3)
following the same ideas we obtain the result. �
2.2 Graphs in P SL2(R, τ )
It is possible to consider graphs in P SL2(R, τ ).
Definition 2.2. A graph in P SL2(R, τ ) is the image of a section
s0 : ⊂ M2 −→ P SL2(R, τ ),
where is a domain of M2.
Given a domain ⊂ M2 we also denote by its lift to M2 × {0}, with thisidentification the graph �(u) of u ∈ C0(∂) ∩ C∞() is given by,
�(u) = {(x, y, u(x, y)) ∈ P SL2(R, τ ); (x, y) ∈ }
Lemma 2.3. [13, p. 13] (The main curvature equation on the divergence
form). Let�(u) be the graph in P SL2(R, τ ) of the function u : ⊂ M2 −→ R
having constant mean curvature H. Then, the function u satisfies the equation
2H = divM2(
α
We1 + β
We2),
where W =√1+ α2 + β2 and,
• α = uxλ
+ 2τ λy
λ2,
• β = uyλ
− 2τ λx
λ2.
3 Rotational surfaces
To study this kind of surfaces, we will take the disk model for the hyperbolicspace M2 (see Chapter 2).
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 551
Observe that, the plane {y = 0} ⊂ P SL2(R, τ ) endowed with the inducedmetric is isometric to the Euclidean plane. This plane is generated by the x-axis
−→0X and the t-axis
−→0T . Consider the C∞-function u defined in an interval
I ⊂ −→0X and denote by α the graph of this function, that is,
α = {(x, 0, u(x)); x ∈ I}.To obtain a rotational surfaces, we will apply a one-parameter group of
rotational isometries to α. We denote by S the resulting surface. Since, weare working with rotational surfaces, we will consider polar coordinates,⎧⎪⎪⎨⎪⎪⎩
x = tanh(ρ2
)cos(θ),
y = tanh(ρ2
)sin(θ),
where ρ is the hyperbolic distance measure from the origin of D2 and θ ∈[0, 2π ].In this coordinates the surface S can be parameterized by,
ϕ(ρ, θ) =(tanh
(ρ2
)cos(θ), tanh
(ρ2
)sin(θ), u(ρ)
).
Following the above notations, we have the following lemma.
Lemma 3.1. (Main lemma). Supposing that S has constant mean curvature H.Then, the function u satisfies
u(ρ) =∫ ρ
∗
(2H cosh(r)+ d)√1+ 4τ 2 tanh2 ( r2)√
sinh2(r)− (2H cosh(r)+ d)2dr (3.1)
where d is a real number.
Proof. The proof follows by integrating the mean curvature equation on thedivergence form. �
3.1 Examples of rotational surfaces in PSL2(R, τ )
Now, we will explore the Lemma 3.1.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

552 CARLOS PEÑAFIEL
Lemma 3.2. Setting d = −2H and τ = −1/2, then the integral
u(ρ) =∫ ρ
∗
(2H cosh(r)− 2H)
√1+ tanh2 ( r2)√
sinh2(r)− (2H cosh(r)− 2H)2dr,
has the following solution,
• If 4H 2 − 1 > 0 then,
u(ρ) = 4√2H√
4H 2 − 1
[arctan
( √cosh(ρ)
4H2+14H2−1 − cosh(ρ)
)]
− 2 arctan⎛⎝√
8H24H2−1
√cosh(ρ)√
4H2+14H2−1 − cosh(ρ)
⎞⎠ .
• If 1− 4H 2 > 0 then,
u(ρ) = 4√2H√
1− 4H 2 ln⎛⎝√cosh(ρ)+
√1+ 4H 21− 4H 2 + cosh(ρ)
⎞⎠
+2 arctan⎛⎝−√
8H 2
1− 4H 2√cosh(ρ)√
1+4H21−4H2 + cosh(ρ)
⎞⎠
Proof. In both cases, a direct computation gives,
uρ(ρ) =(2H cosh(ρ)− 2H)
√1+ tanh2(ρ2 )√
sinh2(ρ)− (2H cosh(ρ)− 2H)2�
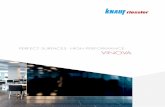
Example 3.3. Making H = √3/2 in the Lemma 3.2, we obtain a rotational
surface, which is a graph over a domain in D2. Since the rotation by π around
the x-axis is an isometry of P SL2(R, τ ), the surface can be extend to get acomplete embedded rotational surface (called sphere, see Fig. 1). The equation,
u(ρ) = 2√3 arcsin(√
cosh(ρ)√2
)+ 2 arctan
(−√
3√cosh(ρ)√
2− cosh(ρ)
)
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 553
can be seen in xy-coordinate
u(x, y) = 2√3 arcsin(√
λ(x, y)− 1√2
)+ 2 arctan
(−√
3√λ(x, y)− 1√
3− λ(x, y)
)
where λ(x, y) = 2
1− (x2 + y2) . Maple’s help gives,
Figure 1: Sphere. Figure 2: Generating curve.
We ended this section by showing a surface which is an entire graph, havingconstant mean curvature H = 1/2.Example 3.4. Making H = 1/2 in the Lemma 3.2, we obtain an H = 1/2-
surface; invariant by rotations, embedding in P SL2(R), see Figure 3. Morespecifically, the function u satisfies,
u(ρ) = 2√cosh(ρ)− 2 arctan(√cosh(ρ))which expressed in Euclidian coordinates gives,
u(x, y) = 2
√cosh(2 tanh−1(
√x2 + y2))
− 2 arctan(√cosh(2 tanh−1(
√x2 + y2)))
Remark 3.5. Using the Maximum’s Principle with the last example, it is pos-sible to show that there is no compact surface having constant mean curvatureH = 1/2.Bull Braz Math Soc, Vol. 43, N. 4, 2012

554 CARLOS PEÑAFIEL
Figure 3: Entire graph. Figure 4: Generating curve.
3.2 Minimal surfaces invariant by rotations in PSL2(R, τ )
In this section we discuss briefly the behavior of rotational minimal surface, thatis when H ≡ 0.On [13] Rami Younes presented several examples of minimal invariant sur-
faces, which are immersed in P SL2(R) (that is, when τ ≡ −1/2).Considering H ≡ 0 in the Lemma 3.1 we obtain the following proposition.
Proposition 3.6. (Minimal Rotational Surfaces). For each d ≥ 0 there existsa complete minimal rotational surface Md . The surface M0 is the slice t =0. For d > 0 the rotational surface Md (called catenoid) is embedded andhomeomorphic to an annulus.
Proof. Observe that, the Lemma 3.1 gives,
u(ρ) =∫ ρ
sinh−1(d)
d√1+ 4τ 2 tanh2 ( r2)√sinh2(r)− d2
dr
A simple computation gives
u′ =d√1+ 4τ 2 tanh2 ( r2)√sinh2(r)− d2
> 0.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 555
Set
f = 1+ 4τ 2 tanh2(r2
)g = sinh2 r − d2
Then
u′ = d√fg
this implies
u′′ = d2
√gff ′g − f g′
g2
Since
f ′g − f g′ = 8τ 2 tanh(ρ/2) sinh(ρ)(1− cosh(ρ))− 8τ
2d2 tanh2(ρ/2)sinh(ρ)
− sinh(2ρ) < 0.
we obtain u′′ < 0.
Thus, the function u is strictly increasing concave-function whose graph is acurve having finite curvature on at the vertical point sinh−1(d).Considering the rotation by π around the x-axis, we obtain a complete curve
which generate a complete surface. This surface is called Catenoid. �
Remark 3.7. Considering the rotation by π around the x-axis, we obtain acomplete embedded surface (called Catenoid).
3.2.1 Height of catenoid
In this section, we follow the ideas presented by Barbara Nelli, Ricardo SaEarp, Walcy Santos, and Eric Toubiana on [6, Proposition 5.1] to describe the
geometric behavior of catenoids in P SL2(R, τ ).
Remark 3.8. In H2 ×R, that is, when τ ≡ 0, the height of the catenoids is lessthan π and tends to π , when d tends to +∞, (see Proposition 3.6 for notation).Let C be the complete catenoid in H2 × R, generated by the function,
u(ρ) =∫ ρ
sinh−1(d)
d√sinh2(r)− d2
dr, r ≥ sinh−1(d).
Bull Braz Math Soc, Vol. 43, N. 4, 2012

556 CARLOS PEÑAFIEL
Figure 5: Complete catenoid. Figure 6: Generating curve.
On [6, Proposition 5.1], the authors showed that, the function
h(d) = 2∫ +∞
sinh−1(d)
d√sinh2(r)− d2
dr, r ≥ sinh−1(d)
satisfies,limd→0
h(d) = 0 and limd→+∞
h(d) = π
When τ �= 0 we obtain a general result about height of catenoid, moreprecisely.
Proposition 3.9. The asymptotic boundary ofMd ⊂ P SL2(R, τ ) is two hor-izontal circles in ∂∞(D) × R and the vertical distance between them is a non-decreasing function h(d) satisfying,
limd→0
h(d) = 0 and limd→+∞ h(d) =
√1+ 4τ 2π
Proof. We denote by C the complete catenoid in P SL2(R, τ ), generated bythe function,
u(ρ) =∫ ρ
sinh−1(d)
d√1+ 4τ 2 tanh2 ( r2)√sinh2(r)− d2
dr
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 557
We can consider the function,
h(d) = 2∫ +∞
sinh−1(d)
d√1+ 4τ 2 tanh2 ( r2)√sinh2(r)− d2
dr, r ≥ sinh−1(d).
A straight computation shows that, h(d) is convergent for any d ∈ [d0,+∞)
and h′(d) > 0.Furthermore, observe that,
h(d) < h(d) <√1+ 4τ 2h(d),
this implies,
limd→0
h(d) = 0 and limd→+∞ h(d) ≤
√1+ 4τ 2π. (3.2)
On the other hand, let D > 0 fixed, big such that,
sinh−1(d) > 2 sinh−1(D),
observe that, d → +∞ if D→ +∞. This implies,
tanh2(r2
)≥ D2
1+ D2 = 1− 1
1+ D2 ,
where, r ≥ sinh−1(d). Thus,√1+ 4τ 2 tanh2
(t2
)≥√1+ 4τ 2
(1− 1
1+ D2).
Hence, √1+ 4τ 2
(1− 1
1+ D2)h(d) ≤ h(d).
Making D → +∞, we obtain,√1+ 4τ 2π ≤ lim
d→+∞h(d). (3.3)
From equations (3.2) and (3.3) we obtain,
limd→+∞ h(d) =
√1+ 4τ 2π,
this completes the proof. �
Bull Braz Math Soc, Vol. 43, N. 4, 2012

558 CARLOS PEÑAFIEL
3.3 Geometric behavior of H -rotational surfaces in PSL2(R, τ )
In this section, we follow the ideas presented by Barbara Nelli, Ricardo Sa Earp,Walcy Santos, and Eric Toubiana on [6, Proposition 5.2, Proposition 5.3].
3.3.1 The case 0 < H ≤ 1/2We describe the behavior of rotational H -surfaces. For later use we define thefunctions g(ρ) and f (ρ),
g(ρ) = d + 2H cosh(ρ)f (ρ) = sinh2(ρ)− (d + 2H cosh(ρ))2
= (1− 4H 2) cosh2(ρ)− 4dH cosh(ρ)− 1− d2where d ∈ R and H > 0.
Lemma 3.10. Assume
0 < H <1
2.
We have f (ρ) ≥ 0 if and only if
cosh ρ ≥ 2dH +√1− 4H 2 + d2
1− 4H 2Let ρ1 ≥ 0 such that
cosh ρ1 = 2dH +√1− 4H 2 + d2
1− 4H 2then f (ρ1) = 0 and ρ1 = 0 if and only if d = −2H.(1) If d > −2H, then
−d2H
< cosh ρ1.
Consequently the function u is strictly increasing for ρ ≥ ρ1 > 0 andhas a nonfinite derivative at ρ1.
(2) If d = −2H, then
u′(ρ) = 2H√cosh ρ − 1
√1+ 4τ 2 tanh2(ρ/2)√
(1− 4H 2) cosh ρ + 4H 2 + 1 .
Therefore the function u is defined for ρ ≥ 0, it has a zero derivativeat 0 and is strictly increasing for ρ > 0.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 559
(3) If d < −2H, then there exists ρ0 > ρ1 > 0 such that−d2H
= cosh ρ0.Consequently the function u is defined for ρ ≥ ρ1 > 0 with a nonfinitederivative at ρ1, it is strictly decreasing for ρ1 < ρ < ρ0, has a zeroderivative at ρ0 and it is strictly increasing for ρ > ρ0.
(4) For any d we have,
limρ→+∞ u(ρ) = +∞.
Proof. Observe that,
u(ρ) =∫ ρ
∗
(d + 2H cosh r)√1+ 4τ 2 tanh2 r/2√
sinh2 r − (d + 2H cosh r)2dr
u′(ρ) = g(ρ)√1+ 4τ 2 tanh2 ρ/2√
f (ρ)and f (ρ) ≥ 0 when
cosh(ρ) ≥ 2dH +√1− 4H 2 + d2
1− 4H 2 .
Furthermore
2dH +√1− 4H 2 + d2
1− 4H 2 ≥ 1⇐⇒
2dH +√1− 4H 2 + d2
1− 4H 2 × 2dH −√1− 4H 2 + d2
2dH −√1− 4H 2 + d2 ≥ 1⇐⇒
1+ d2√1− 4H 2 + d2 − 2dH ≥ 1⇐⇒
1+ d2 + 2dH ≥√1+ d2 − 4H 2
which is equivalent to
(1+ d2 + 2dH)2 ≥ (√1+ d2 − 4H 2)2 ⇐⇒
(1+ d2)2 + 4dH(1+ d2)+ 4H 2d2 ≥ 1+ d2 − 4H 2 ⇐⇒d2 + 4dH + 4H 2 ≥ 0 ⇐⇒
(d + 2H)2 ≥ 0Bull Braz Math Soc, Vol. 43, N. 4, 2012

560 CARLOS PEÑAFIEL
Thus2dH +√
1− 4H 2 + d21− 4H 2 ≥ 1 .
Let ρ1 such that
cosh ρ1 = 2dH +√1− 4H 2 + d2
1− 4H 2 .
Then,
ρ1 = 0⇔d = −2H
Now, we prove each statement.
(1) If d > −2H thend + 2H cosh ρ1 > −2H + 2H = 0
that is
cosh ρ1 >−d2H
,
so u′(ρ) > 0, that is the function u is strictly increasing for ρ ≥ ρ1 > 0and has a nonfinite derivative at ρ1.
(2) If d = −2H , we set
u′ = 2H√
(cosh ρ − 1)(1+ 4τ 2 tanh2(ρ/2))a cosh ρ + (2− a)
where a = 1− 4H 2 > 0, thenu′ = 2H
√p(ρ) > 0
u′′ = Hp′√psince
p′ > 0
we have, u′′ > 0, that is, the function u is defined for ρ ≥ 0, it has a zeroderivative at 0, is strictly increasing for ρ > 0, and it is a convex function.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 561
(3) If d < −2H , then there exists ρ0 > ρ1 such that cosh ρ0 = −d2H. Indeed,
we must have
2dH +√1− 4H 2 + d2
1− 4H 2 < − d2H
⇔2H < |d|
that is, either d > 2H or d < −2H . Consequently the function u isdefined for ρ ≥ ρ1 > 0 with a nonfinite derivative at ρ1, it is strictlydecreasing for ρ1 < ρ < ρ0, has a zero derivative at ρ0 and it is strictlyincreasing for ρ > ρ0.
(4) Observe that,
limρ→+∞ u
′ = 2√1+ 4τ 2H√1− 4H 2
that is, there are two numbers δ > 0 and R � 1 such that
u(ρ) =∫ ρ
R
g(r)√1+ 4τ 2 tanh2(r/2)√
f (r)dr ≥
∫ ρ
Rδdr = v(ρ)
since limρ→+∞ v(ρ) = +∞ we have that, lim
ρ→+∞ u(ρ) = +∞.
this complete the proof. �
Remark 3.11. Observe that, for H = 1/2, f (ρ) = −2d cosh ρ − (1 + d2).Thus, in this case, the set {ρ, f (ρ) > 0} is nonempty when d < 0.
Following the ideas from Lemma (3.10), we have the next lemma.
Lemma 3.12. Assume H = 1/2 and d < 0. Then f (ρ) ≥ 0 if and only if
cosh ρ ≥ 1+ d2−2d
Let ρ1 ≥ 0 such thatcosh ρ1 = 1+ d2
−2d ,
then f (ρ1) = 0 and ρ1 = 0 if and only if d = −1.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

562 CARLOS PEÑAFIEL
(1) If d ∈ (−1, 0), then−d < cosh ρ1.
Consequently the function u is strictly increasing for ρ ≥ ρ1 > 0 and hasa nonfinite derivative at ρ1.
(2) If d = −1, then
u′(ρ) = 1√2
√(cosh ρ − 1)(1+ 4τ 2 tanh2(ρ/2)).
Therefore the function u is defined for ρ ≥ 0, it has a zero derivative at 0and is strictly increasing for ρ > 0.
(3) If d < −1 there exists ρ0 > ρ1 > 0 such that
−d = cosh ρ0.Consequently the function u is defined for ρ ≥ ρ1 > 0 with a nonfinitederivative at ρ1, it is strictly nonincreasing for ρ1 < ρ < ρ0, has a zeroderivative at ρ0 and it is strictly nondecreasing for ρ > ρ0.
(4) For any d we havelim
ρ→+∞ u(ρ) = +∞.
Now we compute the curvature at the point ρ = ρ1, remember that:
u′ = (d + 2H cosh(ρ))√1+ 4τ 2 tanh2(ρ/2)√
sinh2(ρ)− (d + 2H cosh(ρ))2= g(ρ)
√h(ρ)√
f (ρ)
Lemma 3.13. Letting ρ −→ ρ1, we infer by a computation that the curvature
k(ρ) = u′′
(1+ (u′)2)3/2
goes to
• k(ρ1) = − f ′(ρ1)2h(ρ1)g2(ρ1)
when ρ → ρ1, if d �= −2H,
• k(ρ1) = H when ρ → ρ1 = 0, if d ≡ −2H,
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 563
Proof. Observe that
• If d �= −2H ,g′(ρ) = 2H sinh(ρ)
h′(ρ) = 4τ 2 tanh(ρ/2)sech2(ρ/2)
f ′(ρ) = sinh(2ρ)(1− 4H 2)− 4Hd sinh(ρ)thus, f ′(ρ1) �= 0, g′(ρ1) �= 0, h′(ρ1) �= 0. Since
u′′ = 2g′h f + gh′ f − gh f ′2 f 3/2
√h
then
k(ρ) = u′′
(1+ (u′)2)3/2= 2g′h f + gh′ f − gh f ′
2√h( f + g2h)3/2
As 0 < ρ1 < ∞, we have 0 < h(ρ1) < ∞, 0 < g2(ρ1) < ∞, f (ρ1) = 0.This is clear that k(ρ) → k(ρ1) when ρ → ρ1.
• If d ≡ −2H , then f (ρ) = (cosh(ρ)− 1)((1− 4H 2)(cosh(ρ)− 1)+ 2),so
u′ = 2H√cosh(ρ)− 1
√1+ 4τ 2 tanh2(ρ/2)√
(1− 4H 2)(cosh(ρ)− 1)+ 2 = 2H√g√h√f
and
k(ρ) = H√g√h( f + 4H 2gh)3/2 (g′h f + gh′ f − gh f ′)
= H√h( f + 4H 2gh)3/2
(g′√g h f +
√g(h′ f − h f ′)
)here, f (0) = 2, h(0) = 1, g(0) = 0, and h′(0) = 0; as
g′h f√g = √cosh(ρ)+ 1h(ρ) f (ρ) → 2√2, if ρ → 0
then k(ρ) → H when ρ → ρ1 = 0. �
Bull Braz Math Soc, Vol. 43, N. 4, 2012

564 CARLOS PEÑAFIEL
The rotation by π around the geodesic {y = 0, t = 0} is an isometry. Thisfact join with the Lemma (3.10) and Lemma (3.12) gives the following theorem.
Theorem 3.14. (Rotational H -surface with 0 < H ≤ 1/2). Assume 0 < H ≤1/2. there exists a one-parameter family �d , d ∈ R for H < 1/2 and d < 0for H = 1/2, of complete rotational H-surfaces.(1) For d > −2H, the surface�d is a properly embedded annulus, symmetric
with respect to the slice {t = 0}, the distance between the “neck” and therotational axis R = {(0, 0)× R} is
s0 = cosh−1(2dH +√
1− 4H 2 + d21− 4H 2
)for H < 1/2 and
s0 = cosh−1(1+ d2−2d
)for H = 1/2. See Figure (7a).
(2) For d = −2H, the surface �−2H is an entire vertical graph, denotedby SH . Moreover SH is contained in the half-space {t ≥ 0} and it istangent to slice D2 × {0} at the point (0, 0, 0). See Figure (7b).
(3) For d < −2H, the surface �d is a properly immersed (and non-embedded) annulus, it is symmetric with respect to slice {t = 0}, thedistance between the “neck” and the rotational axis R is
s1 = cosh−1(2dH +√
1− 4H 2 + d21− 4H 2
)for H < 1/2 and
s1 = cosh−1(1+ d2−2d
)for H = 1/2. See Figure (7c).
(4) In each of the previous cases the surface is unbounded in the t-coor-dinate. When d tends to −2H with either d > −2H or d < −2H,then the surface �d tends toward the union of SH and its symmetric withrespect to the slice {t = 0}. Furthermore, any rotational H-surface with0 < H ≤ 1/2 is up to an ambient isometry, a part of a surface of thefamily �d .
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 565
Figure 7: Generating curve for rotational surfaces with H ≤ 1/2.
3.3.2 The case H > 1/2
Observe that,
f (ρ) = (1− 4H 2) cosh2 ρ − 4Hd cosh ρ − (1+ d2),so for H > 1/2, the set
{ρ, f (ρ) > 0}is empty if d ≥ 0.Furthermore, when either
cosh(ρ) = 2dH +√1− 4H 2 + d2
1− 4H 2 = 0
or
cosh(ρ) = 2dH −√1− 4H 2 + d2
1− 4H 2 = 0then
f (ρ) = 0On the other hand necessarily 1 − 4H 2 + d2 > 0, that is d < −√
4H 2 − 1.Following the ideas presented in the previous case, we obtain the following
results.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

566 CARLOS PEÑAFIEL
Lemma 3.15. Let H and d satisfying H > 1/2 and d < −√4H 2 − 1. Then,
there exists two numbers 0 ≤ ρ1 < ρ2 such that
cosh ρ1 = 2dH +√1− 4H 2 + d2
1− 4H 2
cosh ρ2 = 2dH −√1− 4H 2 + d2
1− 4H 2Therefore, f (ρ) > 0 if and only if ρ1 < ρ < ρ2 and f (ρ1) = f (ρ2) = 0.(1) If d < −2H, then ρ1 > 0 and there exists a unique number ρ0 ∈ (ρ1, ρ2)
satisfying g(ρ0) = 0. Furthermore g ≤ 0 on [ρ1, ρ0) and g ≥ 0 on(ρ0, ρ2]. Consequently, the function u is defined on [ρ1, ρ2], has a nonfinitederivative at ρ1 and ρ2, has a zero derivative at ρ0, is strictly decreasingon (ρ1, ρ0) and strictly increasing on (ρ0, ρ2).
(2) If d = −2H, then ρ1 = 0 and
u′(ρ) = 2H√cosh ρ − 1
√1+ 4τ 2 tanh2(ρ/2)√
(1− 4H 2) cosh ρ + 4H 2 + 1 .
Consequently, the function u is defined on [0, ρ2], is strictly increasing,has a zero derivative at 0 and a nonfinite derivative at ρ2.
(3) If −2H < d < −√4H 2 − 1, then ρ1 > 0 and g ≤ 0 on [ρ1, ρ2].
Therefore the function u is defined on [ρ1, ρ2], is strictly increasing andhas nonfinite derivative at ρ1 and ρ2.
Lemma 3.16. Letting ρ −→ ρ1, ρ2, we infer by a computation that thecurvature
k(ρ) = u′′
(1+ (u′)2)3/2
goes to
• k(ρ1) = − f ′(ρ1)2h(ρ1)g2(ρ1)
when ρ → ρ1, if d �= −2H,
• k(ρ2) = − f ′(ρ2)2h(ρ2)g2(ρ2)
when ρ → ρ2, if d �= −2H,
• k(ρ1) = H when ρ → ρ1 = 0, if d ≡ −2H,Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 567
As an immediate consequence of those Lemmas we obtain the followingTheorem.
Theorem 3.17. (Rotational surfaces with H > 1/2). Assume H > 1/2.There exists a one-parameter family�d of complete rotational H-surfaces, d ≤−√
4H 2 − 1.(1) For d < −2H, the surface �d is an immersed (and nonembedded) an-
nulus, invariant by a vertical translation and is contained in the closedregion bounded by the two vertical cylinders ρ = ρ1 and ρ = ρ2. Fur-thermore ρ1 → +∞ and ρ2 → +∞ when d → −∞ and ρ1 → 0 andρ2 → cosh−1
(4H2+14H2−1
)when d → −2H. Such surfaces are analogous to
the nodoids of Delaunay in R3. See Fig. 8a;
(2) For d = −2H, the surface�−2H is an embedded sphere and the maximaldistance from the rotational axis is ρ2 = cosh−1
(4H2+14H2−1
). See Fig. 8b;
(3) For −2H < d < −√4H 2 − 1; the surface �d is an embedded annulus,
invariant by a vertical translation and is contained in the closed regionbounded by the two vertical cylinders ρ = ρ1 and ρ = ρ2. Furthermoreρ1 → 0 and ρ2 → cosh−1
(4H2+14H2−1
)when d → −2H and both ρ1, ρ2 →
a b c
Figure 8: Generating curve for rotational surfaces with H > 1/2.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

568 CARLOS PEÑAFIEL
cosh−1(
2H√4H2−1
)when d → −√
4H 2 − 1. Moreover
ρ2 < cosh−1(
2H√4H 2 − 1
)< ρ2.
Such surfaces are analogous to the undoloids of Delaunay in R3. SeeFig. 8c;
(4) For d = −√4H 2 − 1, the surface �−
√4H2−1 is the vertical cylinder
over the circle with hyperbolic radius cosh−1(
2H√4H2−1
).
3.4 Applications: the half-space theorem for H = 1/2-rotational surfacesIn this section we use the study of rotational surfaces to give some interestingapplications.In the paper: “A half-space theorem for mean curvature H = 1
2 -surfacesin H2 × R”, Ricardo Sá Earp and Barbara Nelli have studied the asymptoticbehavior for rotational H = 1/2-surfaces immersed into H2 × R.There, also they have proved a vertical half-space theorem for surfaces with
constant mean curvature H = 1/2; properly immersed in the product spaceH2 × R (see [8, Theorem 1]).Since the behavior of rotational H = 1
2 -surfaces immersed into P SL2(R, τ )is similar to the rotational surfaces in H2 × R [see Theorem 3.14], it is naturalasks for a half-space theorem (in the same sense) for mean curvature H = 1/2-surfaces in P SL2(R, τ ).Setting α = −d, then for any α ∈ R+ there exists a rotational surface �α of
constant mean curvature H = 12 .
uα(ρ) =∫ (cosh(ρ)− α)
√1+ 4τ 2 tanh2 (ρ2 )√
sinh2(ρ)− (cosh(ρ)− α)2dρ.
Recall that
(i) For α �= 1, the surface �α has two vertical ends (where a vertical end isa topological annulus, with no asymptotic point at finite height) that arevertical graphs over the exterior of a disk Dα.
(ii) For α ≡ 1, the surface �1, which we denote simply by S, has only oneend and it is a graph over D2 the hyperbolic disk.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 569
Up to vertical translation, one can assume that �α (α �= 1) is symmetric withrespect to the horizontal plane t = 0. For α = 1, the surface �1 has only oneend, it is a graph over D2. For any α > 1 the surface �α is not embedded. Theself-intersection set is a circle on the plane t = 0. Denote by ρα the radius of theintersection circle. For α < 1 the surface �α is embedded.
For any α ∈ R+, let uα : D2 × {0}\Dα −→ R be the function such that theend of the surface �α is the vertical graph of uα. Then:
(i) For any α �= 1, the graph of uα is defined outside the disk Dα of radiusρα > 0 and it is vertical along the boundary ∂Dα. We choose the integra-tion constant such that the graph of uα is contained in the halfspace t ≥ 0.When 0 < α < 1, he radius of the disk Dα is ρα = − ln(α) > 0.
(ii) For α = 1, the disk Dα is empty and the function u1 defines an entiregraph.
Lemma 3.18. The asymptotic behavior of the function uα has the followingform:
uα(ρ) �√1+ 4τ 2√
αexp(
ρ2 ), ρ → ∞
where ρ is the hyperbolic distance measure from the origin.This lemma motives the following definition.
Definition 3.19. We call√1+4τ 2√
α∈ R+ the (exponential) growth of the end.
Recall that for α > 1 the surface �α are immersed, while they are embeddedfor 0 < α ≤ 1.Remark 3.20. The growth of any immersed rotational surface is smaller thanthe growth of the simply connected surface S, and the growth of any embeddedrotational surface is greater than the growth of S.
Theorem 3.21. Let S be a simply connected rotational surface in P SL2(R, τ ),having constant mean curvature H = 1
2 . Let � be a complete surface havingconstant mean curvature H = 1
2 , different from a rotational simply connectedone. Then, � cannot be properly immersed in the mean convex side of S.
Proof. One can assume that the surface S is tangent at the origin of P SL2(R, τ )to the slice t = 0, and it is contained in {t ≥ 0}.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

570 CARLOS PEÑAFIEL
Suppose by contradiction, that � is contained in the mean convex side ofS. We will divide the proof in two steps. First, we will suppose that � is notasymptotic to S and we will get a contradiction. Afterwards, we will assume that� is asymptotic to S, again we will get a contradiction. Those two steps provethe theorem.
First step. If � is not asymptotic to S, lifts vertically S. Then, there existsa first contact point p between � and the translation of S, this means that, ina neighborhood of p ∈ �, � is in the mean convex side of S and both meancurvature vectors coincides at p. In this case, one has a contradiction by themaximum principle.
�
P SL2(R, τ )0
p S↑
Figure 9: Schematic figure.
Second step. Now, we can assume that � is asymptotic to S when t goesto +∞.Since� is properly immersed, there is a point q ∈ � which has lowest height.
To see this, consider the slice {t = n} with n big enough so that the intersectionbetween {t = n} will be non-empty. The portion of � (which we labeled �0)living inside of the region bounded by the slice {t = n} and the surface S iscompact with ∂�0 ⊂ {t = n}. This guarantee the existence of such point.Let h be the height of q. Denote by S(h) the vertical lifting of S of hight h.
Now, consider 0 < ε < h fixed, and denote by S(h − ε), the translation of S toheight t = h − ε.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 571
Denote by W the noncompact slab bounded by S and S(h − ε). From themaximum principle, there are no compact component of � contained in W .Let �1 be a noncompact connected component of � contained in W . By
definition of �1, the boundary of �1 is contained in ∂W − S = S(h − ε).Now, consider the family of rotational non-embedded surfaces �α, α > 1.
Translates each �α vertically in order to have the waist on the plane t = h − ε.By abuse of notation, we continue to call the translation �α. Denote by �+
α
the part of the surface outside the cylinder of radius ρα living in the {t ≥ 0}space. Note that �+
α is embedded and is a vertical graph. When α → +∞, thenρα → +∞ as well. Furthermore, the growth of the end of �+
α is smaller thanthe growth of S.Hence, when α is great enough, say α0, �+
α is outside of the mean convex sideof S. Thus, �+
α0does not intersect �. Furthermore, when α → 1, �+
α convergeto S(h − ε).Now, start to decrease α from α0 to one. Before reaching α = 1, the surface
�+α first meet S and then touches � tangentially at an interior point of �+
α , itbecause ∂�1 lies on S(h−ε) and the growth of any�+
α is smaller than the growthof S.Again, the existence of such an interior tangency point is a contradiction with
the maximum principle. �
4 H -surfaces invariant by parabolic isometries in PSL2(R, τ )
To study this kind of surfaceswewill take the half-planemodel for the hyperbolicspace M2.In this section we study the geometric behavior and we give explicit examples
of surfaces invariant by one-parameter group of parabolic isometries having
constant mean curvature, which are immersed in P SL2(R, τ ).Again, We will take a curve α(y) = (0, y, u(y)) in the yt-plane (here u is a
C∞−function defined on an interval) and we will apply one-parameter group �
of parabolic isometries to α. We denote by S = �(α) the surfaces invariant byone-parameter group of parabolic isometries generated by α.Taking the horizontal translations on H2, the surface S can be parameterized
by,ϕ(x, y) = (x, y, u(y)), y > 0.
Following the ideas as for the rotational surfaces, we obtain the followingresults.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

572 CARLOS PEÑAFIEL
Lemma 4.1. With the above notations and denoting by H the constant meancurvature of S, then the function u satisfies:
u(y) =∫ y
∗(d.s − 2H)
√1+ 4τ 2
s√1− (d.s − 2H)2
ds
where d is a real number.
4.1 Examples of H -surfaces invariant by parabolic isometries
A straightforward computation gives the next lemma.
Lemma 4.2. The solution of the integral is given by
• If H ≡ 0, thenu(y) =
√1+ 4τ 2 arcsin(dy)
• If H = 1
2, then
u(y) =√1+ 4τ 2 arcsin(dy − 1)+ 2
√1+ 4τ 2
tan( arcsin(dy−1)2 )+ 1
• If H >1
2, then
u(y) =√1+ 4τ 2 arcsin(dy − 2H)
− 4√1+ 4τ 2H√4H 2 − 1 arctan
(2H tan( arcsin(dy−2H)
2 )+ 1√4H 2 − 1
)
where d ∈ R.
Example 4.3. Considering H ≡ 0, τ = −1/2 and d = 1, we obtain a mini-mal surface invariant by one-parameter group of parabolic isometries which isa vertical graph, now we consider the rotation by π around the y axis to ob-tain a complete embedded minimal surfaces invariant by parabolic isometries,
embedding in P SL2(R, τ ), see Figure 10. Maple’s help gives,
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 573
Figure 10: Minimal surfaces invari-ant by parabolic isometries.
Figure 11: Generating curve.
4.2 Geometric behavior of H -surfaces invariant by parabolic isometriesin PSL2(R, τ )
In this section we describe the behavior of surfaces invariant by parabolic iso-metries, which have constant mean curvature H �= 0. For later use we definethe function g(y) = dy − 2H .The proof of the following Lemmas are analogous as for the rotational case.
Lemma 4.4. Let H be the mean curvature of a surface invariant by parabolicisometries. Then from the Formula (4.1) we obtain,
(1) If d > 0, we have
• If 1/2 < H, then y1 < y < y2 where y1 = 2H−1d and y2 = 2H+1
dand there exists a unique number y0 = 2H
d ∈ (y1, y2) satisfyingg(y0) = 0. Furthermore g ≤ 0 on [y1, y0) and g ≥ 0 on (y0, y1].Consequently, the function u(y) is defined on [y1, y2], has a nonfinitederivative at y1 and y2, is strictly decreasing on (y1, y0) and strictlyincreasing on (y0, y2).
• If 0 < H < 1/2, then 0 < y < y2 and there exists a unique numbery0 = 2H
d ∈ (0, y2) satisfying g(y0) = 0. Furthermore g ≤ 0 on(0, y0) and g ≥ 0 on (y0, y2]. Consequently, the function u(y) isdefined on (0, y2]. The function u has a nonfinite derivative at y2, isstrictly decreasing on (0, y0) and strictly increasing on (y0, y2).
Bull Braz Math Soc, Vol. 43, N. 4, 2012

574 CARLOS PEÑAFIEL
(2) If d < 0, we have
• Here, necessarily 0 < H < 1/2. Setting d = −c, we have that,0 < y < y2, where y2 = 1−2H
c . Consequently, the function u(y) isdefined on (0, y2], has a nonfinite derivative y2, is strictly decreasingon (0, y2).
In the next lemma we consider the function f (y) = 1− (dy − 2H)2.
Lemma 4.5. Letting y −→ y1, y2, we infer by a computation that thecurvature
k(ρ) = u′′
(1+ (u′)2)3/2
goes to
• If d > 0 and H > 1/2,
k(y1) = − y21 f ′(y1)(1+ 4τ 2)g(y1)
k(y2) = − y22 f ′(y2)(1+ 4τ 2)g(y2)
• If d > 0 and 0 < H < 1/2
k(y2) = − 2dy221+ 4τ 2
• If d < 0, that is d = −c, c > 0,
k(y2) = 2cy221+ 4τ 2
As a consequence of Lemma (4.4), we have the next theorem.
Theorem 4.6. For any H > 0, there exists a one-parameter family Pd , d ∈ R ofcomplete H-surface invariant by one-parameter group of parabolic isometriesimmersed into P SL2(R, τ ). More precisely,
(1) For H > 1/2 the surface Pd , d > 0, is immersed (and nonembedded)annulus, invariant by vertical translation, and is contained in the closedregion bounded by the vertical cylinders y = y1 and y = y2. See Fig. 12a.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 575
(2) For 0 < H < 1/2 we have,
(i) If d > 0, the surface Pd is a properly immersed (and nonembedded)annulus, it is symmetric with respect to slice t = 0, the maximumvalue of y is y = y2. See Fig. 12b.
(ii) If d = −c < 0, the surface Pd is a properly embedded annulussymmetric with respect to the slice t = 0, and the maximum value ofy is y = y2. See Fig. 12c.
(3) For H = 1/2, the surface Pd , d > 0, is a properly immersed (and non-embedded) annulus, it is symmetric with respect to slice t = 0, the maxi-mum value of y is y = y2. See Fig. 12b.
(4) Fixing 0 < H < 1/2, when d tends to 0, then the surface Pd tends towardthe surface
F(y) = 2√1+ 4τ 2H ln(y)√1− 4H 2 .
Figure 12: Generating curve for surfaces invariant by parabolic isometries.
5 H -surfaces invariant by hyperbolic isometries in PSL2(R, τ )
Now, we focus our attention on surfaces invariant by a one-parameter group ofhyperbolic isometries. To study this kind of surfaces we will take the half-planemodel for the hyperbolic space M2.
Bull Braz Math Soc, Vol. 43, N. 4, 2012

576 CARLOS PEÑAFIEL
In order to simplify the computations, we consider the following parametriza-tion, {
x = eϕ cos θ,y = eϕ sin θ,
where −∞ < ϕ < +∞ and 0 < θ < π .Considering a function u of class C∞, defined on the half-circle,{
x(θ) = cos θ,y(θ) = sin θ.
Then the invariant surface S generated by the function u can be parameterizedby,
ψ(ϕ, θ) = (eϕ cos(θ), eϕ sin(θ), u(θ)) .
Until now we have considered that the normal to the surface is pointing up.In this case, we consider the normal to the surface pointing down. Consideringthis modification we have the following lemma.
Lemma 5.1. The function u satisfies
u(θ) =∫ θ
∗(d + 2H cot(ν))√1+ 4τ 2 cos2(ν)√1− sin2(ν)(d + 2H cot(ν))2
dν − 2τθ, (5.1)
where d is a real number.
5.1 Examples of H -surfaces invariant by hyperbolic isometries
Now, we explore the Lemma 5.1. Considering τ = −1/2 we obtain the follow-ing lemma.
Lemma 5.2. (Scherk’s surface) Making H ≡ 0, d = 1, then the integral
u =∫ θ
∗
√1+ cos2(ν))√1− sin2(ν)
dν + θ
0 < ν < π/2, has the following expression,
u(θ) = sin−1(sin(θ)√2
)+ tanh−1
( √2 sin(θ)√
cos(2θ)+ 3
)+ θ. (5.2)
Bull Braz Math Soc, Vol. 43, N. 4, 2012

SURFACES IN P SL2(R, τ ) 577
In xy-coordinates,
u(x, y) = sin−1(
y√2√x2 + y2
)+ tanh−1
( √2y√
3x2 + 2y2)+ tan−1
( yx
),
x > 0, y > 0.
The function (5.2) takes infinite boundary data on the positive y-axis andzero asymptotic value boundary data at the positive x-axis. Since the rotationby π around the y-axis is an isometry, we obtain a surface which takes −∞boundary data on the positive y-axis and zero asymptotic value boundary dataat the positive x-axis. That surfaces are called Scherk’s surfaces, an importantapplication is given in the following theorem.
Theorem 5.3. There is no minimal graph over a domain W of M2 taking infiniteasymptotic values on an arc l of the asymptotic boundary of W.
Proof. Suppose there exists a minimal graph u over a domain W of M2 takinginfinite asymptotic values on an arc l of the asymptotic boundary ofW . Considera complete geodesic β inside ofW with boundary two points of l and the Scherk’ssurface with value −∞ on β. Then applying vertical translation on the Scherksurface, there is a first contact point between this surface and the graph of thefunction u, this contradicts the Maximum Principle. �
Acknowledgments. The author would like to thank his thesis advisors, Pro-fessor Ricardo Sa Earp and Professor Harold Rosenberg, for suggesting thisproblem, for many interesting and stimulating discussion on the subject andfor the constant support throughout his work. Also the author is grateful to theProfessor Eric Toubiana for useful information about homogeneous 3-manifolds.
References
[1] U. Abresch and H. Rosenberg. Generalized Hopf differential. Math. Contemp.,28 (2005), 1–28 (electronic).
[2] B. Daniel. Isometric Immersions into 3-dimensional homogeneous manifolds.Comment. Math. Helv., 82(1) (2007), 87–131.
[3] C. Figueroa, F. Mercuri and R. Pedrosa. Invariant surfaces of the Heisenberggroup. Ann. Mat. Pura Appl., 177 (1999), 173–194.
[4] L. Hauswirth, B. Daniel and P. Mira. Constant mean curvature surfaces in homo-geneous manifolds. Kias Workshop on Differential Geometry (2009).
Bull Braz Math Soc, Vol. 43, N. 4, 2012

578 CARLOS PEÑAFIEL
[5] L. Mazet, M. Rodríguez and H. Rosenberg. The Dirichlet problem for the mini-mal surface equation – with possible infinite boundary data – over domains in aRiemannian surface, preprint.
[6] B. Nelli, R. Sa Earp, W. Santos and E. Toubiana. Uniqueness of H-surfaces inH2 × R, |H | ≤ 1/2, with boundary one or two parallel horizontal circles. Ann.Global Anal. Geom., 33(4) (2008), 307–321.
[7] R. Sa Earp. Parabolic and hyperbolic screw motion surfaces in H2 × R. J. Aust.Math. Soc., 85(1) (2008), 113–143.
[8] R. Sa Earp and B. Nelli. A halfspace theorem for mean curvature H = 1/2surfaces in H2 × R. J. Math. Anal. Appl., 365(1) (2010), 167–170.
[9] R. Sa Earp and E. Toubiana. An asymptotic theorem for minimal surfaces andexistence results for minimal graphs in H2 × R. Math. Ann., 342(2) (2008),309–331 (electronic).
[10] R. Sa Earp and E. Toubiana. Screw motion surfaces inH2×R and S2×R. IllinoisJ. Math., 49(4) (2005), 1323–1362 (electronic).
[11] E. Toubiana. Note sur les variétés homogènes de dimension 3.[12] W. Thurston. Three-dimensional geometry and topology. Princeton (1997).[13] R. Younes. Minimal Surfaces in P SL2(R), prepint.
Carlos Peñafiel
Instituto de MatemáticaUniversidade Federal de Rio de JaneiroBRAZIL
E-mail: [email protected]
Bull Braz Math Soc, Vol. 43, N. 4, 2012