![CAT(0) METRICS ON CONTRACTIBLE MANIFOLDSfunar/opencatpolv6... · 2019-12-29 · metric length spaces [10], the second part of the Cartan–Hadamard seemed to break down in the topological](https://static.fdocument.org/doc/165x107/5f700bb682565b2c980458bf/cat0-metrics-on-contractible-manifolds-funaropencatpolv6-2019-12-29-metric.jpg)
· In 1925, E. Cartan made the following assertions:´ (1) H x is a Lie subgroup of O(T xM). (2)...
112
NONEMBEDDING AND NONEXTENSION RESULTS IN SPECIAL HOLONOMY ROBERT L. BRYANT DUKE UNIVERSITY E ruditio et R eligio D U
Transcript of · In 1925, E. Cartan made the following assertions:´ (1) H x is a Lie subgroup of O(T xM). (2)...
NONEMBEDDING AND NONEXTENSION RESULTSIN SPECIAL HOLONOMY
ROBERT L. BRYANT
DUKE UNIVERSITY
Eruditio et Relig
io
D U
Riemannian Holonomy. To a Riemannian manifold (Mn, g) associate itsLevi-Civita connection ∇, which defines, for a piecewise C1 γ : [0, 1] → M ,a parallel transport
P∇γ : Tγ(0)M → Tγ(1)M,
which is a linear isometry between the two tangent spaces.
In 1918, J. Schouten considered the set
Hx =P∇
γ γ(0) = γ(1) = x⊆ O(TxM)
and called its dimension the number of degrees of freedom of g.
P∇γ =
(P∇
γ
)−1and P∇
γ2∗γ1= P∇
γ2 P∇
γ1
where γ is the reverse of γ and γ2∗γ1 is the concatenation of paths γ1 and γ2
satisfying γ1(1) = γ2(0).
In particular, Hx ⊂ O(TxM) is a subgroup and
Hγ(1) = P∇γ Hγ(0)
(P∇
γ
)−1.
Riemannian Holonomy. To a Riemannian manifold (Mn, g) associate itsLevi-Civita connection ∇, which defines, for a piecewise C1 γ : [0, 1] → M ,a parallel transport
P∇γ : Tγ(0)M → Tγ(1)M,
which is a linear isometry between the two tangent spaces.
In 1918, J. Schouten considered the set
Hx =P∇
γ γ(0) = γ(1) = x⊆ O(TxM)
and called its dimension the number of degrees of freedom of g.
P∇γ =
(P∇
γ
)−1and P∇
γ2∗γ1= P∇
γ2 P∇
γ1
where γ is the reverse of γ and γ2∗γ1 is the concatenation of paths γ1 and γ2
satisfying γ1(1) = γ2(0).
In particular, Hx ⊂ O(TxM) is a subgroup and
Hγ(1) = P∇γ Hγ(0)
(P∇
γ
)−1.
Riemannian Holonomy. To a Riemannian manifold (Mn, g) associate itsLevi-Civita connection ∇, which defines, for a piecewise C1 γ : [0, 1] → M ,a parallel transport
P∇γ : Tγ(0)M → Tγ(1)M,
which is a linear isometry between the two tangent spaces.
In 1918, J. Schouten considered the set
Hx =P∇
γ γ(0) = γ(1) = x⊆ O(TxM)
and called its dimension the number of degrees of freedom of g.
P∇γ =
(P∇
γ
)−1and P∇
γ2∗γ1= P∇
γ2 P∇
γ1
where γ is the reverse of γ and γ2∗γ1 is the concatenation of paths γ1 and γ2
satisfying γ1(1) = γ2(0).
In particular, Hx ⊂ O(TxM) is a subgroup and
Hγ(1) = P∇γ Hγ(0)
(P∇
γ
)−1.
Riemannian Holonomy. To a Riemannian manifold (Mn, g) associate itsLevi-Civita connection ∇, which defines, for a piecewise C1 γ : [0, 1] → M ,a parallel transport
P∇γ : Tγ(0)M → Tγ(1)M,
which is a linear isometry between the two tangent spaces.
In 1918, J. Schouten considered the set
Hx =P∇
γ γ(0) = γ(1) = x⊆ O(TxM)
and called its dimension the number of degrees of freedom of g.
P∇γ =
(P∇
γ
)−1and P∇
γ2∗γ1= P∇
γ2 P∇
γ1
where γ is the reverse of γ and γ2∗γ1 is the concatenation of paths γ1 and γ2
satisfying γ1(1) = γ2(0).
In particular, Hx ⊂ O(TxM) is a subgroup and
Hγ(1) = P∇γ Hγ(0)
(P∇
γ
)−1.
Riemannian Holonomy. To a Riemannian manifold (Mn, g) associate itsLevi-Civita connection ∇, which defines, for a piecewise C1 γ : [0, 1] → M ,a parallel transport
P∇γ : Tγ(0)M → Tγ(1)M,
which is a linear isometry between the two tangent spaces.
In 1918, J. Schouten considered the set
Hx =P∇
γ γ(0) = γ(1) = x⊆ O(TxM)
and called its dimension the number of degrees of freedom of g.
P∇γ =
(P∇
γ
)−1and P∇
γ2∗γ1= P∇
γ2 P∇
γ1
where γ is the reverse of γ and γ2∗γ1 is the concatenation of paths γ1 and γ2
satisfying γ1(1) = γ2(0).
In particular, Hx ⊂ O(TxM) is a subgroup and
Hγ(1) = P∇γ Hγ(0)
(P∇
γ
)−1.
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
In 1925, E. Cartan made the following assertions:(1) Hx is a Lie subgroup of O(TxM).(2) If Hx acts reducibly on TxM , then g is a product metric.
In dimensions 2 and 3, this determines the possible holonomy groups.
He considered the case n = 4 and Hx SU(2) and stated:(1) Such metrics g have vanishing Ricci tensor.(2) Such metrics g are what we now call ‘self-dual’.(3) Such metrics g depend on 2 functions of 3 variables.
Cartan gave no indication of proof and never mentioned the subject again.
Probable argument: The SU(2)-frame bundle of such a metric satisfies
dω + θ ∧ω = 0, dθ + θ ∧ θ = 〈R, ω ∧ω〉, dR + θ.R = 〈R′, ω〉where ω takes values in R4, θ takes values in su(2), R takes values in W4,the 5-dimensional real irr. rep. of SU(2), and R′ ⊂ Hom(R4, W4) takesvalues in V5, the 6-dimensional complex irr. rep. of SU(2). The latter is aninvolutive tableau in Hom(R4, W4), with characters (5, 5, 2, 0). QED
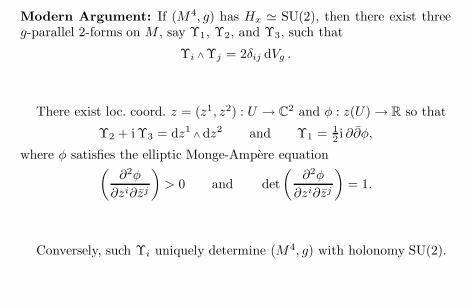
Modern Argument: If (M4, g) has Hx SU(2), then there exist threeg-parallel 2-forms on M , say Υ1, Υ2, and Υ3, such that
Υi ∧Υj = 2δij dVg .
There exist loc. coord. z = (z1, z2) : U → C2 and φ : z(U) → R so that
Υ2 + i Υ3 = dz1 ∧ dz2 and Υ1 = 12 i ∂∂φ,
where φ satisfies the elliptic Monge-Ampere equation(∂2φ
∂zi∂zj
)> 0 and det
(∂2φ
∂zi∂zj
)= 1.
Conversely, such Υi uniquely determine (M4, g) with holonomy SU(2).
Modern Argument: If (M4, g) has Hx SU(2), then there exist threeg-parallel 2-forms on M , say Υ1, Υ2, and Υ3, such that
Υi ∧Υj = 2δij dVg .
There exist loc. coord. z = (z1, z2) : U → C2 and φ : z(U) → R so that
Υ2 + i Υ3 = dz1 ∧ dz2 and Υ1 = 12 i ∂∂φ,
where φ satisfies the elliptic Monge-Ampere equation(∂2φ
∂zi∂zj
)> 0 and det
(∂2φ
∂zi∂zj
)= 1.
Conversely, such Υi uniquely determine (M4, g) with holonomy SU(2).
Modern Argument: If (M4, g) has Hx SU(2), then there exist threeg-parallel 2-forms on M , say Υ1, Υ2, and Υ3, such that
Υi ∧Υj = 2δij dVg .
There exist loc. coord. z = (z1, z2) : U → C2 and φ : z(U) → R so that
Υ2 + i Υ3 = dz1 ∧ dz2 and Υ1 = 12 i ∂∂φ,
where φ satisfies the elliptic Monge-Ampere equation(∂2φ
∂zi∂zj
)> 0 and det
(∂2φ
∂zi∂zj
)= 1.
Conversely, such Υi uniquely determine (M4, g) with holonomy SU(2).
Modern Argument: If (M4, g) has Hx SU(2), then there exist threeg-parallel 2-forms on M , say Υ1, Υ2, and Υ3, such that
Υi ∧Υj = 2δij dVg .
There exist loc. coord. z = (z1, z2) : U → C2 and φ : z(U) → R so that
Υ2 + i Υ3 = dz1 ∧ dz2 and Υ1 = 12 i ∂∂φ,
where φ satisfies the elliptic Monge-Ampere equation(∂2φ
∂zi∂zj
)> 0 and det
(∂2φ
∂zi∂zj
)= 1.
Conversely, such Υi uniquely determine (M4, g) with holonomy SU(2).
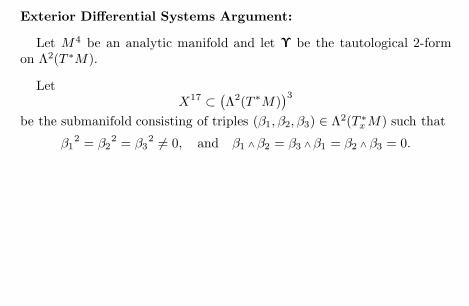
Exterior Differential Systems Argument:
Let M4 be an analytic manifold and let Υ be the tautological 2-formon Λ2(T ∗M).
LetX17 ⊂
(Λ2(T ∗M)
)3
be the submanifold consisting of triples (β1, β2, β3) ∈ Λ2(T ∗x M) such that
β12 = β2
2 = β32 = 0, and β1 ∧β2 = β3 ∧β1 = β2 ∧ β3 = 0.
The pullbacks Υi = π∗i (Υ) define an exterior differential system on X
I = dΥ1, dΥ2, dΥ3.An integral manifold Y 4 ⊂ X transverse to π : X → M then represents achoice of three closed 2-forms Υi on an open subset U ⊂ M that satisfy thealgebra conditions needed to define an SU(2)-structure on U .
Simple calculation shows that I is involutive.
Exterior Differential Systems Argument:
Let M4 be an analytic manifold and let Υ be the tautological 2-formon Λ2(T ∗M).
LetX17 ⊂
(Λ2(T ∗M)
)3
be the submanifold consisting of triples (β1, β2, β3) ∈ Λ2(T ∗x M) such that
β12 = β2
2 = β32 = 0, and β1 ∧β2 = β3 ∧β1 = β2 ∧ β3 = 0.
The pullbacks Υi = π∗i (Υ) define an exterior differential system on X
I = dΥ1, dΥ2, dΥ3.An integral manifold Y 4 ⊂ X transverse to π : X → M then represents achoice of three closed 2-forms Υi on an open subset U ⊂ M that satisfy thealgebra conditions needed to define an SU(2)-structure on U .
Simple calculation shows that I is involutive.
Exterior Differential Systems Argument:
Let M4 be an analytic manifold and let Υ be the tautological 2-formon Λ2(T ∗M).
LetX17 ⊂
(Λ2(T ∗M)
)3
be the submanifold consisting of triples (β1, β2, β3) ∈ Λ2(T ∗x M) such that
β12 = β2
2 = β32 = 0, and β1 ∧β2 = β3 ∧β1 = β2 ∧ β3 = 0.
The pullbacks Υi = π∗i (Υ) define an exterior differential system on X
I = dΥ1, dΥ2, dΥ3.An integral manifold Y 4 ⊂ X transverse to π : X → M then represents achoice of three closed 2-forms Υi on an open subset U ⊂ M that satisfy thealgebra conditions needed to define an SU(2)-structure on U .
Simple calculation shows that I is involutive.
Exterior Differential Systems Argument:
Let M4 be an analytic manifold and let Υ be the tautological 2-formon Λ2(T ∗M).
LetX17 ⊂
(Λ2(T ∗M)
)3
be the submanifold consisting of triples (β1, β2, β3) ∈ Λ2(T ∗x M) such that
β12 = β2
2 = β32 = 0, and β1 ∧β2 = β3 ∧β1 = β2 ∧ β3 = 0.
The pullbacks Υi = π∗i (Υ) define an exterior differential system on X
I = dΥ1, dΥ2, dΥ3.An integral manifold Y 4 ⊂ X transverse to π : X → M then represents achoice of three closed 2-forms Υi on an open subset U ⊂ M that satisfy thealgebra conditions needed to define an SU(2)-structure on U .
Simple calculation shows that I is involutive.
Exterior Differential Systems Argument:
Let M4 be an analytic manifold and let Υ be the tautological 2-formon Λ2(T ∗M).
LetX17 ⊂
(Λ2(T ∗M)
)3
be the submanifold consisting of triples (β1, β2, β3) ∈ Λ2(T ∗x M) such that
β12 = β2
2 = β32 = 0, and β1 ∧β2 = β3 ∧β1 = β2 ∧ β3 = 0.
The pullbacks Υi = π∗i (Υ) define an exterior differential system on X
I = dΥ1, dΥ2, dΥ3.An integral manifold Y 4 ⊂ X transverse to π : X → M then represents achoice of three closed 2-forms Υi on an open subset U ⊂ M that satisfy thealgebra conditions needed to define an SU(2)-structure on U .
Simple calculation shows that I is involutive.
Exterior Differential Systems Argument:
Let M4 be an analytic manifold and let Υ be the tautological 2-formon Λ2(T ∗M).
LetX17 ⊂
(Λ2(T ∗M)
)3
be the submanifold consisting of triples (β1, β2, β3) ∈ Λ2(T ∗x M) such that
β12 = β2
2 = β32 = 0, and β1 ∧β2 = β3 ∧β1 = β2 ∧ β3 = 0.
The pullbacks Υi = π∗i (Υ) define an exterior differential system on X
I = dΥ1, dΥ2, dΥ3.An integral manifold Y 4 ⊂ X transverse to π : X → M then represents achoice of three closed 2-forms Υi on an open subset U ⊂ M that satisfy thealgebra conditions needed to define an SU(2)-structure on U .
Simple calculation shows that I is involutive.
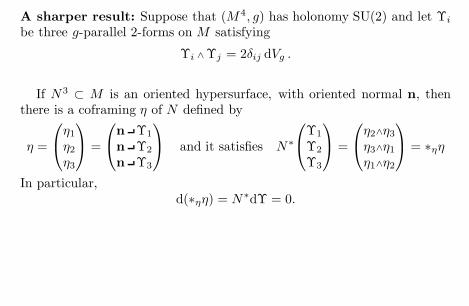
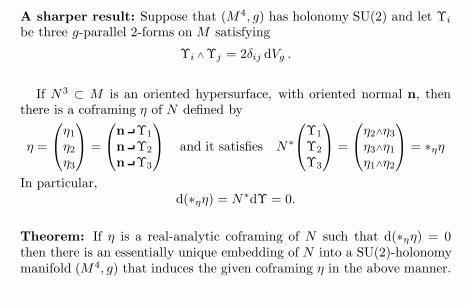
A sharper result:Suppose that (M4, g) has holonomy SU(2) and let Υi
be three g-parallel 2-forms on M satisfying
Υi ∧Υj = 2δij dVg .
If N3 ⊂ M is an oriented hypersurface, with oriented normal n, thenthere is a coframing η of N defined by
η =
⎛⎝η1
η2
η3
⎞⎠ =
⎛⎝n Υ1
n Υ2
n Υ3
⎞⎠ and it satisfies N∗
⎛⎝Υ1
Υ2
Υ3
⎞⎠ =
⎛⎝η2∧η3
η3∧η1
η1∧η2
⎞⎠ = ∗ηη
In particular,d(∗ηη) = N∗dΥ = 0.
Theorem: If η is a real-analytic coframing of N such that d(∗ηη) = 0then there is an essentially unique embedding of N into a SU(2)-holonomymanifold (M4, g) that induces the given coframing η in the above manner.
A sharper result: Suppose that (M4, g) has holonomy SU(2) and let Υi
be three g-parallel 2-forms on M satisfying
Υi ∧Υj = 2δij dVg .
If N3 ⊂ M is an oriented hypersurface, with oriented normal n, thenthere is a coframing η of N defined by
η =
⎛⎝η1
η2
η3
⎞⎠ =
⎛⎝n Υ1
n Υ2
n Υ3
⎞⎠ and it satisfies N∗
⎛⎝Υ1
Υ2
Υ3
⎞⎠ =
⎛⎝η2∧η3
η3∧η1
η1∧η2
⎞⎠ = ∗ηη
In particular,d(∗ηη) = N∗dΥ = 0.
Theorem: If η is a real-analytic coframing of N such that d(∗ηη) = 0then there is an essentially unique embedding of N into a SU(2)-holonomymanifold (M4, g) that induces the given coframing η in the above manner.
A sharper result: Suppose that (M4, g) has holonomy SU(2) and let Υi
be three g-parallel 2-forms on M satisfying
Υi ∧Υj = 2δij dVg .
If N3 ⊂ M is an oriented hypersurface, with oriented normal n, thenthere is a coframing η of N defined by
η =
⎛⎝η1
η2
η3
⎞⎠ =
⎛⎝n Υ1
n Υ2
n Υ3
⎞⎠ and it satisfies N∗
⎛⎝Υ1
Υ2
Υ3
⎞⎠ =
⎛⎝η2∧η3
η3∧η1
η1∧η2
⎞⎠ = ∗ηη
In particular,d(∗ηη) = N∗dΥ = 0.
Theorem: If η is a real-analytic coframing of N such that d(∗ηη) = 0then there is an essentially unique embedding of N into a SU(2)-holonomymanifold (M4, g) that induces the given coframing η in the above manner.
A sharper result: Suppose that (M4, g) has holonomy SU(2) and let Υi
be three g-parallel 2-forms on M satisfying
Υi ∧Υj = 2δij dVg .
If N3 ⊂ M is an oriented hypersurface, with oriented normal n, thenthere is a coframing η of N defined by
η =
⎛⎝η1
η2
η3
⎞⎠ =
⎛⎝n Υ1
n Υ2
n Υ3
⎞⎠ and it satisfies N∗
⎛⎝Υ1
Υ2
Υ3
⎞⎠ =
⎛⎝η2∧η3
η3∧η1
η1∧η2
⎞⎠ = ∗ηη
In particular,d(∗ηη) = N∗dΥ = 0.
Theorem: If η is a real-analytic coframing of N such that d(∗ηη) = 0then there is an essentially unique embedding of N into a SU(2)-holonomymanifold (M4, g) that induces the given coframing η in the above manner.
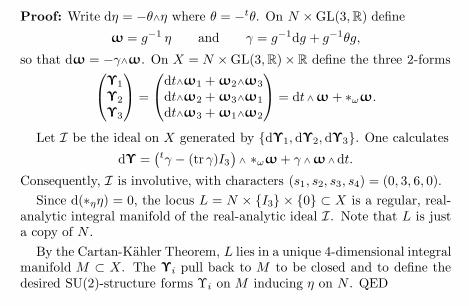
Proof: Write dη = −θ∧η where θ = −tθ.On N × GL(3, R) define
ω = g−1 η and γ = g−1dg + g−1θg,
so that dω = −γ∧ω. On X = N × GL(3, R) × R define the three 2-forms⎛⎝Υ1
Υ2
Υ3
⎞⎠ =
⎛⎝dt∧ω1 + ω2∧ω3
dt∧ω2 + ω3∧ω1
dt∧ω3 + ω1∧ω2
⎞⎠ = dt ∧ω + ∗ωω.
Let I be the ideal on X generated by dΥ1, dΥ2, dΥ3. One calculates
dΥ =(tγ − (tr γ)I3
)∧ ∗ωω + γ ∧ω∧dt.
Consequently, I is involutive, with characters (s1, s2, s3, s4) = (0, 3, 6, 0).Since d(∗ηη) = 0, the locus L = N × I3 × 0 ⊂ X is a regular, real-
analytic integral manifold of the real-analytic ideal I. Note that L is justa copy of N .
By the Cartan-Kahler Theorem, L lies in a unique 4-dimensional integralmanifold M ⊂ X. The Υi pull back to M to be closed and to define thedesired SU(2)-structure forms Υi on M inducing η on N . QED
Proof: Write dη = −θ∧η where θ = −tθ. On N × GL(3, R) define
ω = g−1 η and γ = g−1dg + g−1θg,
so that dω = −γ∧ω.On X = N × GL(3, R) × R define the three 2-forms⎛⎝Υ1
Υ2
Υ3
⎞⎠ =
⎛⎝dt∧ω1 + ω2∧ω3
dt∧ω2 + ω3∧ω1
dt∧ω3 + ω1∧ω2
⎞⎠ = dt ∧ω + ∗ωω.
Let I be the ideal on X generated by dΥ1, dΥ2, dΥ3. One calculates
dΥ =(tγ − (tr γ)I3
)∧ ∗ωω + γ ∧ω∧dt.
Consequently, I is involutive, with characters (s1, s2, s3, s4) = (0, 3, 6, 0).Since d(∗ηη) = 0, the locus L = N × I3 × 0 ⊂ X is a regular, real-
analytic integral manifold of the real-analytic ideal I. Note that L is justa copy of N .
By the Cartan-Kahler Theorem, L lies in a unique 4-dimensional integralmanifold M ⊂ X. The Υi pull back to M to be closed and to define thedesired SU(2)-structure forms Υi on M inducing η on N . QED
Proof: Write dη = −θ∧η where θ = −tθ. On N × GL(3, R) define
ω = g−1 η and γ = g−1dg + g−1θg,
so that dω = −γ∧ω. On X = N × GL(3, R) × R define the three 2-forms⎛⎝Υ1
Υ2
Υ3
⎞⎠ =
⎛⎝dt∧ω1 + ω2∧ω3
dt∧ω2 + ω3∧ω1
dt∧ω3 + ω1∧ω2
⎞⎠ = dt ∧ω + ∗ωω.
Let I be the ideal on X generated by dΥ1, dΥ2, dΥ3. One calculates
dΥ =(tγ − (tr γ)I3
)∧ ∗ωω + γ ∧ω∧dt.
Consequently, I is involutive, with characters (s1, s2, s3, s4) = (0, 3, 6, 0).Since d(∗ηη) = 0, the locus L = N × I3 × 0 ⊂ X is a regular, real-
analytic integral manifold of the real-analytic ideal I. Note that L is justa copy of N .
By the Cartan-Kahler Theorem, L lies in a unique 4-dimensional integralmanifold M ⊂ X. The Υi pull back to M to be closed and to define thedesired SU(2)-structure forms Υi on M inducing η on N . QED
Proof: Write dη = −θ∧η where θ = −tθ. On N × GL(3, R) define
ω = g−1 η and γ = g−1dg + g−1θg,
so that dω = −γ∧ω. On X = N × GL(3, R) × R define the three 2-forms⎛⎝Υ1
Υ2
Υ3
⎞⎠ =
⎛⎝dt∧ω1 + ω2∧ω3
dt∧ω2 + ω3∧ω1
dt∧ω3 + ω1∧ω2
⎞⎠ = dt ∧ω + ∗ωω.
Let I be the ideal on X generated by dΥ1, dΥ2, dΥ3. One calculates
dΥ =(tγ − (tr γ)I3
)∧ ∗ωω + γ ∧ω∧dt.
Consequently, I is involutive, with characters (s1, s2, s3, s4) = (0, 3, 6, 0).Since d(∗ηη) = 0, the locus L = N × I3 × 0 ⊂ X is a regular, real-
analytic integral manifold of the real-analytic ideal I. Note that L is justa copy of N .
By the Cartan-Kahler Theorem, L lies in a unique 4-dimensional integralmanifold M ⊂ X. The Υi pull back to M to be closed and to define thedesired SU(2)-structure forms Υi on M inducing η on N . QED
Proof: Write dη = −θ∧η where θ = −tθ. On N × GL(3, R) define
ω = g−1 η and γ = g−1dg + g−1θg,
so that dω = −γ∧ω. On X = N × GL(3, R) × R define the three 2-forms⎛⎝Υ1
Υ2
Υ3
⎞⎠ =
⎛⎝dt∧ω1 + ω2∧ω3
dt∧ω2 + ω3∧ω1
dt∧ω3 + ω1∧ω2
⎞⎠ = dt ∧ω + ∗ωω.
Let I be the ideal on X generated by dΥ1, dΥ2, dΥ3. One calculates
dΥ =(tγ − (tr γ)I3
)∧ ∗ωω + γ ∧ω∧dt.
Consequently, I is involutive, with characters (s1, s2, s3, s4) = (0, 3, 6, 0).Since d(∗ηη) = 0, the locus L = N × I3 × 0 ⊂ X is a regular, real-
analytic integral manifold of the real-analytic ideal I. Note that L is justa copy of N .
By the Cartan-Kahler Theorem, L lies in a unique 4-dimensional integralmanifold M ⊂ X. The Υi pull back to M to be closed and to define thedesired SU(2)-structure forms Υi on M inducing η on N . QED
Proof: Write dη = −θ∧η where θ = −tθ. On N × GL(3, R) define
ω = g−1 η and γ = g−1dg + g−1θg,
so that dω = −γ∧ω. On X = N × GL(3, R) × R define the three 2-forms⎛⎝Υ1
Υ2
Υ3
⎞⎠ =
⎛⎝dt∧ω1 + ω2∧ω3
dt∧ω2 + ω3∧ω1
dt∧ω3 + ω1∧ω2
⎞⎠ = dt ∧ω + ∗ωω.
Let I be the ideal on X generated by dΥ1, dΥ2, dΥ3. One calculates
dΥ =(tγ − (tr γ)I3
)∧ ∗ωω + γ ∧ω∧dt.
Consequently, I is involutive, with characters (s1, s2, s3, s4) = (0, 3, 6, 0).Since d(∗ηη) = 0, the locus L = N × I3 × 0 ⊂ X is a regular, real-
analytic integral manifold of the real-analytic ideal I. Note that L is justa copy of N .
By the Cartan-Kahler Theorem, L lies in a unique 4-dimensional integralmanifold M ⊂ X. The Υi pull back to M to be closed and to define thedesired SU(2)-structure forms Υi on M inducing η on N . QED
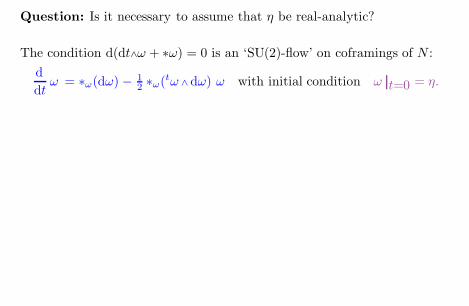
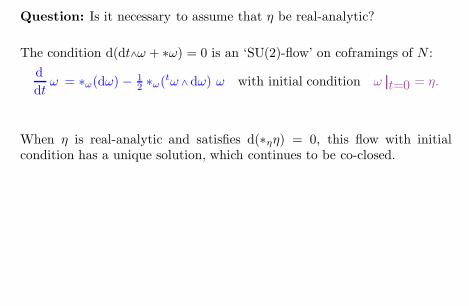
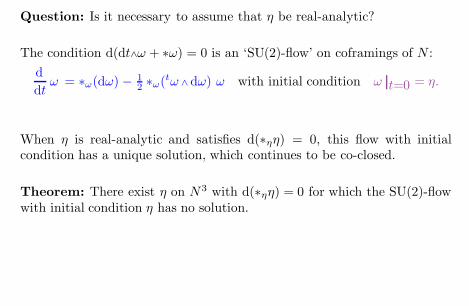
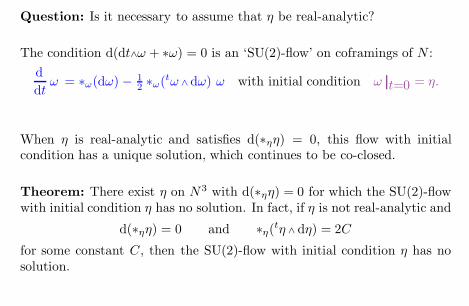
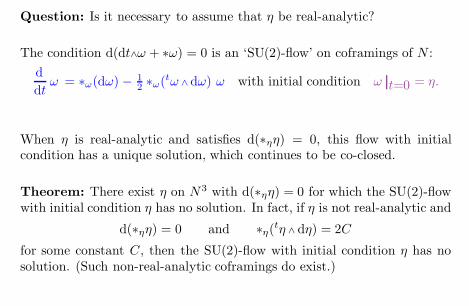
Question: Is it necessary to assume that η be real-analytic?
The condition d(dt∧ω + ∗ω) = 0 is an ‘SU(2)-flow’ on coframings of N :ddt
ω = ∗ω(dω) − 12 ∗ω(tω ∧dω) ω with initial condition ω t=0 = η.
When η is real-analytic and satisfies d(∗ηη) = 0, this flow with initialcondition has a unique solution, which continues to be co-closed.
Theorem: There exist η on N3 with d(∗ηη) = 0 for which the SU(2)-flowwith initial condition η has no solution. In fact, if η is not real-analytic and
d(∗ηη) = 0 and ∗η(tη ∧ dη) = 2C
for some constant C, then the SU(2)-flow with initial condition η has nosolution. (Such non-real-analytic coframings do exist.)
Question: Is it necessary to assume that η be real-analytic?
The condition d(dt∧ω + ∗ω) = 0 is an ‘SU(2)-flow’ on coframings of N :ddt
ω = ∗ω(dω) − 12 ∗ω(tω ∧dω) ω with initial condition ω t=0 = η.
When η is real-analytic and satisfies d(∗ηη) = 0, this flow with initialcondition has a unique solution, which continues to be co-closed.
Theorem: There exist η on N3 with d(∗ηη) = 0 for which the SU(2)-flowwith initial condition η has no solution. In fact, if η is not real-analytic and
d(∗ηη) = 0 and ∗η(tη ∧ dη) = 2C
for some constant C, then the SU(2)-flow with initial condition η has nosolution. (Such non-real-analytic coframings do exist.)
Question: Is it necessary to assume that η be real-analytic?
The condition d(dt∧ω + ∗ω) = 0 is an ‘SU(2)-flow’ on coframings of N :ddt
ω = ∗ω(dω) − 12 ∗ω(tω ∧dω) ω with initial condition ω t=0 = η.
When η is real-analytic and satisfies d(∗ηη) = 0, this flow with initialcondition has a unique solution, which continues to be co-closed.
Theorem: There exist η on N3 with d(∗ηη) = 0 for which the SU(2)-flowwith initial condition η has no solution. In fact, if η is not real-analytic and
d(∗ηη) = 0 and ∗η(tη ∧ dη) = 2C
for some constant C, then the SU(2)-flow with initial condition η has nosolution. (Such non-real-analytic coframings do exist.)
Question: Is it necessary to assume that η be real-analytic?
The condition d(dt∧ω + ∗ω) = 0 is an ‘SU(2)-flow’ on coframings of N :ddt
ω = ∗ω(dω) − 12 ∗ω(tω ∧dω) ω with initial condition ω t=0 = η.
When η is real-analytic and satisfies d(∗ηη) = 0, this flow with initialcondition has a unique solution, which continues to be co-closed.
Theorem: There exist η on N3 with d(∗ηη) = 0 for which the SU(2)-flowwith initial condition η has no solution.In fact, if η is not real-analytic and
d(∗ηη) = 0 and ∗η(tη ∧ dη) = 2C
for some constant C, then the SU(2)-flow with initial condition η has nosolution. (Such non-real-analytic coframings do exist.)
Question: Is it necessary to assume that η be real-analytic?
The condition d(dt∧ω + ∗ω) = 0 is an ‘SU(2)-flow’ on coframings of N :ddt
ω = ∗ω(dω) − 12 ∗ω(tω ∧dω) ω with initial condition ω t=0 = η.
When η is real-analytic and satisfies d(∗ηη) = 0, this flow with initialcondition has a unique solution, which continues to be co-closed.
Theorem: There exist η on N3 with d(∗ηη) = 0 for which the SU(2)-flowwith initial condition η has no solution. In fact, if η is not real-analytic and
d(∗ηη) = 0 and ∗η(tη ∧ dη) = 2C
for some constant C, then the SU(2)-flow with initial condition η has nosolution.(Such non-real-analytic coframings do exist.)
Question: Is it necessary to assume that η be real-analytic?
The condition d(dt∧ω + ∗ω) = 0 is an ‘SU(2)-flow’ on coframings of N :ddt
ω = ∗ω(dω) − 12 ∗ω(tω ∧dω) ω with initial condition ω t=0 = η.
When η is real-analytic and satisfies d(∗ηη) = 0, this flow with initialcondition has a unique solution, which continues to be co-closed.
Theorem: There exist η on N3 with d(∗ηη) = 0 for which the SU(2)-flowwith initial condition η has no solution. In fact, if η is not real-analytic and
d(∗ηη) = 0 and ∗η(tη ∧ dη) = 2C
for some constant C, then the SU(2)-flow with initial condition η has nosolution. (Such non-real-analytic coframings do exist.)
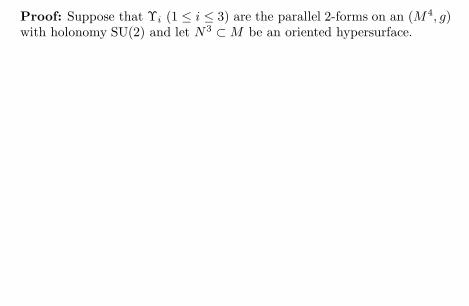
Proof: Suppose that Υi (1 ≤ i ≤ 3) are the parallel 2-forms on an (M4, g)with holonomy SU(2) and let N3 ⊂ M be an oriented hypersurface.
Calculation yields that the induced co-closed coframing η satisfies
∗η(tη ∧dη) = 2H
where H is the mean curvature of N in M .
Now, (M, g) is real-analytic. If H is constant, then elliptic regularityimplies that N must be a real-analytic hypersurface in M and hence ηmust also be real-analytic.
Thus, if η is a non-real-analytic coframing on N3 that satisfies
d(∗ηη) = 0 and ∗η(tη ∧ dη) = 2C
for some constant C, then η cannot be induced on N by an embedding intoan SU(2)-holonomy 4-manifold.
Proof: Suppose that Υi (1 ≤ i ≤ 3) are the parallel 2-forms on an (M4, g)with holonomy SU(2) and let N3 ⊂ M be an oriented hypersurface.
Calculation yields that the induced co-closed coframing η satisfies
∗η(tη ∧dη) = 2H
where H is the mean curvature of N in M .
Now, (M, g) is real-analytic. If H is constant, then elliptic regularityimplies that N must be a real-analytic hypersurface in M and hence ηmust also be real-analytic.
Thus, if η is a non-real-analytic coframing on N3 that satisfies
d(∗ηη) = 0 and ∗η(tη ∧ dη) = 2C
for some constant C, then η cannot be induced on N by an embedding intoan SU(2)-holonomy 4-manifold.
Proof: Suppose that Υi (1 ≤ i ≤ 3) are the parallel 2-forms on an (M4, g)with holonomy SU(2) and let N3 ⊂ M be an oriented hypersurface.
Calculation yields that the induced co-closed coframing η satisfies
∗η(tη ∧dη) = 2H
where H is the mean curvature of N in M .
Now, (M, g) is real-analytic. If H is constant, then elliptic regularityimplies that N must be a real-analytic hypersurface in M and hence ηmust also be real-analytic.
Thus, if η is a non-real-analytic coframing on N3 that satisfies
d(∗ηη) = 0 and ∗η(tη ∧ dη) = 2C
for some constant C, then η cannot be induced on N by an embedding intoan SU(2)-holonomy 4-manifold.
Proof: Suppose that Υi (1 ≤ i ≤ 3) are the parallel 2-forms on an (M4, g)with holonomy SU(2) and let N3 ⊂ M be an oriented hypersurface.
Calculation yields that the induced co-closed coframing η satisfies
∗η(tη ∧dη) = 2H
where H is the mean curvature of N in M .
Now, (M, g) is real-analytic. If H is constant, then elliptic regularityimplies that N must be a real-analytic hypersurface in M and hence ηmust also be real-analytic.
Thus, if η is a non-real-analytic coframing on N3 that satisfies
d(∗ηη) = 0 and ∗η(tη ∧ dη) = 2C
for some constant C, then η cannot be induced on N by an embedding intoan SU(2)-holonomy 4-manifold.
To finish the proof, note that, if a coframing η on N3 is real-analytic in anycoordinate system at all, it will be real-analytic in harmonic coordinates,i.e., local coordinates x : U → R3 satisfying
d(∗ηdx
)= 0.
Now, fix a constant C and consider a coframing η = g(x)−1 dx on U ⊂ R3
where g : U → GL(3, R) is a mapping satisfying the first-order, quasi-linearsystem
d(∗ηη) = 0, ∗η(tη ∧dη) = 2C, d(∗ηdx
)= 0.
This is an elliptic underdetermined system consisting of 7 equations for 9unknowns. Standard theory shows that the general solution is not real-analytic.

To finish the proof, note that, if a coframing η on N3 is real-analytic in anycoordinate system at all, it will be real-analytic in harmonic coordinates,i.e., local coordinates x : U → R3 satisfying
d(∗ηdx
)= 0.
Now, fix a constant C and consider a coframing η = g(x)−1 dx on U ⊂ R3
where g : U → GL(3, R) is a mapping satisfying the first-order, quasi-linearsystem
d(∗ηη) = 0, ∗η(tη ∧dη) = 2C, d(∗ηdx
)= 0.
This is an elliptic underdetermined system consisting of 7 equations for 9unknowns. Standard theory shows that the general solution is not real-analytic.
To finish the proof, note that, if a coframing η on N3 is real-analytic in anycoordinate system at all, it will be real-analytic in harmonic coordinates,i.e., local coordinates x : U → R3 satisfying
d(∗ηdx
)= 0.
Now, fix a constant C and consider a coframing η = g(x)−1 dx on U ⊂ R3
where g : U → GL(3, R) is a mapping satisfying the first-order, quasi-linearsystem
d(∗ηη) = 0, ∗η(tη ∧dη) = 2C, d(∗ηdx
)= 0.
This is an elliptic underdetermined system consisting of 7 equations for 9unknowns. Standard theory shows that the general solution is not real-analytic.
To finish the proof, note that, if a coframing η on N3 is real-analytic in anycoordinate system at all, it will be real-analytic in harmonic coordinates,i.e., local coordinates x : U → R3 satisfying
d(∗ηdx
)= 0.
Now, fix a constant C and consider a coframing η = g(x)−1 dx on U ⊂ R3
where g : U → GL(3, R) is a mapping satisfying the first-order, quasi-linearsystem
d(∗ηη) = 0, ∗η(tη ∧dη) = 2C, d(∗ηdx
)= 0.
This is an elliptic underdetermined system consisting of 7 equations for 9unknowns. Standard theory shows that the general solution is not real-analytic.
The G2-theory. An analogous situation holds in the case of hypersurfacesin Riemannian manifolds (M7, g) with holonomy G2 ⊂ SO(7). In this case,there is a unique g-parallel 3-form σ ∈ Ω3(M) such that
σ ∧ ∗σ = 7 dVg .
Such metrics are Ricci-flat and hence are real-analytic in local g-harmoniccoordinate charts.
Conversely, there is a open set Ω3+(M7) of definite 3-forms, i.e., σ ∈
Ω3+(M7) if and only if, for all x ∈ M , the stabilizer of σx in GL(TxM)
is isomorphic to G2 ⊂ SO(7). These forms are the sections of an opensubbundle Λ3
+(T ∗M) ⊂ Λ3(T ∗M).Such a σ ∈ Ω3
+(M) determines a unique metric gσ and orientation ∗σ
and σ is gσ-parallel if and only if
dσ = 0 and d(∗σσ) = 0.
Theorem: (B—) There is an involutive EDS I on Λ3+(T ∗M) such that a
section σ ∈ Ω3+(M) is an integral of I iff it is gσ-parallel.
The G2-theory. An analogous situation holds in the case of hypersurfacesin Riemannian manifolds (M7, g) with holonomy G2 ⊂ SO(7). In this case,there is a unique g-parallel 3-form σ ∈ Ω3(M) such that
σ ∧ ∗σ = 7 dVg .
Such metrics are Ricci-flat and hence are real-analytic in local g-harmoniccoordinate charts.
Conversely, there is a open set Ω3+(M7) of definite 3-forms, i.e., σ ∈
Ω3+(M7) if and only if, for all x ∈ M , the stabilizer of σx in GL(TxM)
is isomorphic to G2 ⊂ SO(7). These forms are the sections of an opensubbundle Λ3
+(T ∗M) ⊂ Λ3(T ∗M).Such a σ ∈ Ω3
+(M) determines a unique metric gσ and orientation ∗σ
and σ is gσ-parallel if and only if
dσ = 0 and d(∗σσ) = 0.
Theorem: (B—) There is an involutive EDS I on Λ3+(T ∗M) such that a
section σ ∈ Ω3+(M) is an integral of I iff it is gσ-parallel.
The G2-theory. An analogous situation holds in the case of hypersurfacesin Riemannian manifolds (M7, g) with holonomy G2 ⊂ SO(7). In this case,there is a unique g-parallel 3-form σ ∈ Ω3(M) such that
σ ∧ ∗σ = 7 dVg .
Such metrics are Ricci-flat and hence are real-analytic in local g-harmoniccoordinate charts.
Conversely, there is a open set Ω3+(M7) of definite 3-forms, i.e., σ ∈
Ω3+(M7) if and only if, for all x ∈ M , the stabilizer of σx in GL(TxM)
is isomorphic to G2 ⊂ SO(7). These forms are the sections of an opensubbundle Λ3
+(T ∗M) ⊂ Λ3(T ∗M).Such a σ ∈ Ω3
+(M) determines a unique metric gσ and orientation ∗σ
and σ is gσ-parallel if and only if
dσ = 0 and d(∗σσ) = 0.
Theorem: (B—) There is an involutive EDS I on Λ3+(T ∗M) such that a
section σ ∈ Ω3+(M) is an integral of I iff it is gσ-parallel.
The G2-theory. An analogous situation holds in the case of hypersurfacesin Riemannian manifolds (M7, g) with holonomy G2 ⊂ SO(7). In this case,there is a unique g-parallel 3-form σ ∈ Ω3(M) such that
σ ∧ ∗σ = 7 dVg .
Such metrics are Ricci-flat and hence are real-analytic in local g-harmoniccoordinate charts.
Conversely, there is a open set Ω3+(M7) of definite 3-forms, i.e., σ ∈
Ω3+(M7) if and only if, for all x ∈ M , the stabilizer of σx in GL(TxM)
is isomorphic to G2 ⊂ SO(7). These forms are the sections of an opensubbundle Λ3
+(T ∗M) ⊂ Λ3(T ∗M).Such a σ ∈ Ω3
+(M) determines a unique metric gσ and orientation ∗σ
and σ is gσ-parallel if and only if
dσ = 0 and d(∗σσ) = 0.
Theorem: (B—) There is an involutive EDS I on Λ3+(T ∗M) such that a
section σ ∈ Ω3+(M) is an integral of I iff it is gσ-parallel.
The G2-theory. An analogous situation holds in the case of hypersurfacesin Riemannian manifolds (M7, g) with holonomy G2 ⊂ SO(7). In this case,there is a unique g-parallel 3-form σ ∈ Ω3(M) such that
σ ∧ ∗σ = 7 dVg .
Such metrics are Ricci-flat and hence are real-analytic in local g-harmoniccoordinate charts.
Conversely, there is a open set Ω3+(M7) of definite 3-forms, i.e., σ ∈
Ω3+(M7) if and only if, for all x ∈ M , the stabilizer of σx in GL(TxM)
is isomorphic to G2 ⊂ SO(7). These forms are the sections of an opensubbundle Λ3
+(T ∗M) ⊂ Λ3(T ∗M).Such a σ ∈ Ω3
+(M) determines a unique metric gσ and orientation ∗σ
and σ is gσ-parallel if and only if
dσ = 0 and d(∗σσ) = 0.
Theorem: (B—) There is an involutive EDS I on Λ3+(T ∗M) such that a
section σ ∈ Ω3+(M) is an integral of I iff it is gσ-parallel.
Hypersurfaces.G2 acts transitively on S6 ⊂ R7, with stabilizer SU(3).
Hence, an oriented N6 ⊂ M inherits a canonical SU(3)-structure, which isdetermined by the (1, 1)-form ω and (3, 0)-form Ω = φ + i ψ defined by
ω = n σ and Ω = φ + i ψ = N∗σ − i (n ∗σσ).
In fact, if one defines f : R × N → M by
f(t, p) = expp
(tn(p)
),
then
f∗σ = dt ∧ω + Re(Ω) and f∗(∗σσ) = 12 ω2 − dt ∧ Im(Ω).
where, now, ω and Ω are forms on N that depend on t.
For each fixed t = t0, the induced SU(3)-structure on N satisfies
d Re(Ω) = d(f∗t0
σ) = 0 and d(12
ω2) = d(f∗
t0(∗σσ)
)= 0,
so these are necessary conditions on the SU(3)-structure on N that it beinduced by immersion into a G2-holonomy manifold M .
Hypersurfaces. G2 acts transitively on S6 ⊂ R7, with stabilizer SU(3).
Hence, an oriented N6 ⊂ M inherits a canonical SU(3)-structure, which isdetermined by the (1, 1)-form ω and (3, 0)-form Ω = φ + i ψ defined by
ω = n σ and Ω = φ + i ψ = N∗σ − i (n ∗σσ).
In fact, if one defines f : R × N → M by
f(t, p) = expp
(tn(p)
),
then
f∗σ = dt ∧ω + Re(Ω) and f∗(∗σσ) = 12 ω2 − dt ∧ Im(Ω).
where, now, ω and Ω are forms on N that depend on t.
For each fixed t = t0, the induced SU(3)-structure on N satisfies
d Re(Ω) = d(f∗t0
σ) = 0 and d(12
ω2) = d(f∗
t0(∗σσ)
)= 0,
so these are necessary conditions on the SU(3)-structure on N that it beinduced by immersion into a G2-holonomy manifold M .
Hypersurfaces. G2 acts transitively on S6 ⊂ R7, with stabilizer SU(3).
Hence, an oriented N6 ⊂ M inherits a canonical SU(3)-structure, which isdetermined by the (1, 1)-form ω and (3, 0)-form Ω = φ + i ψ defined by
ω = n σ and Ω = φ + i ψ = N∗σ − i (n ∗σσ).
In fact, if one defines f : R × N → M by
f(t, p) = expp
(tn(p)
),
then
f∗σ = dt ∧ω + Re(Ω) and f∗(∗σσ) = 12 ω2 − dt ∧ Im(Ω).
where, now, ω and Ω are forms on N that depend on t.
For each fixed t = t0, the induced SU(3)-structure on N satisfies
d Re(Ω) = d(f∗t0
σ) = 0 and d(12
ω2) = d(f∗
t0(∗σσ)
)= 0,
so these are necessary conditions on the SU(3)-structure on N that it beinduced by immersion into a G2-holonomy manifold M .
Hypersurfaces. G2 acts transitively on S6 ⊂ R7, with stabilizer SU(3).
Hence, an oriented N6 ⊂ M inherits a canonical SU(3)-structure, which isdetermined by the (1, 1)-form ω and (3, 0)-form Ω = φ + i ψ defined by
ω = n σ and Ω = φ + i ψ = N∗σ − i (n ∗σσ).
In fact, if one defines f : R × N → M by
f(t, p) = expp
(tn(p)
),
then
f∗σ = dt ∧ω + Re(Ω) and f∗(∗σσ) = 12 ω2 − dt ∧ Im(Ω).
where, now, ω and Ω are forms on N that depend on t.
For each fixed t = t0, the induced SU(3)-structure on N satisfies
d Re(Ω) = d(f∗t0
σ) = 0 and d(12
ω2) = d(f∗
t0(∗σσ)
)= 0,
so these are necessary conditions on the SU(3)-structure on N that it beinduced by immersion into a G2-holonomy manifold M .
Theorem: A real-analytic SU(3)-structure on N6 is induced by embeddinginto a G2-holonomy manifold iff its defining forms ω and Ω satisfy
d Re(Ω) = 0 and d(12 ω2) = 0.
Proof: Define a tautological 2-form ω and 3-form Ω on F(N)/ SU(3) asfollows: For a coframe u : TxN → C3, define these forms at [u] = u·SU(3) ∈F(N)/ SU(3) by
ω[u] = π∗(u∗( i2 (tdz ∧dz))
)and Ω[u] = π∗(u∗(dz1 ∧dz2 ∧dz3)
)where π : F(N)/ SU(3) → N is the basepoint projection.
On X = R × F(N)/ SU(3), consider the 3-form and 4-form
σ = dt ∧ω + Re(Ω) and φ = 12 ω2 − dt ∧ Im(Ω).
Let I be the EDS generated by the closed 4-form dσ and 5-form dφ.Then I is involutive, with characters (s1, . . . , s7) = (0, 0, 1, 4, 10, 13, 0).
Since d(Re(Ω)
)= d(1
2 ω2) = 0, the given SU(3)-structure defines a reg-ular integral manifold L ⊂ X of I lying in the hypersurface t = 0. By theCartan-Kahler Theorem, L lies in a unique I-integral M7 ⊂ X. QED
Theorem: A real-analytic SU(3)-structure on N6 is induced by embeddinginto a G2-holonomy manifold iff its defining forms ω and Ω satisfy
d Re(Ω) = 0 and d(12 ω2) = 0.
Proof: Define a tautological 2-form ω and 3-form Ω on F(N)/ SU(3) asfollows: For a coframe u : TxN → C3, define these forms at [u] = u·SU(3) ∈F(N)/ SU(3) by
ω[u] = π∗(u∗( i2 (tdz ∧dz))
)and Ω[u] = π∗(u∗(dz1 ∧dz2 ∧dz3)
)where π : F(N)/ SU(3) → N is the basepoint projection.
On X = R × F(N)/ SU(3), consider the 3-form and 4-form
σ = dt ∧ω + Re(Ω) and φ = 12 ω2 − dt ∧ Im(Ω).
Let I be the EDS generated by the closed 4-form dσ and 5-form dφ.Then I is involutive, with characters (s1, . . . , s7) = (0, 0, 1, 4, 10, 13, 0).
Since d(Re(Ω)
)= d(1
2 ω2) = 0, the given SU(3)-structure defines a reg-ular integral manifold L ⊂ X of I lying in the hypersurface t = 0. By theCartan-Kahler Theorem, L lies in a unique I-integral M7 ⊂ X. QED
Theorem: A real-analytic SU(3)-structure on N6 is induced by embeddinginto a G2-holonomy manifold iff its defining forms ω and Ω satisfy
d Re(Ω) = 0 and d(12 ω2) = 0.
Proof: Define a tautological 2-form ω and 3-form Ω on F(N)/ SU(3) asfollows: For a coframe u : TxN → C3, define these forms at [u] = u·SU(3) ∈F(N)/ SU(3) by
ω[u] = π∗(u∗( i2 (tdz ∧dz))
)and Ω[u] = π∗(u∗(dz1 ∧dz2 ∧dz3)
)where π : F(N)/ SU(3) → N is the basepoint projection.
On X = R × F(N)/ SU(3), consider the 3-form and 4-form
σ = dt ∧ω + Re(Ω) and φ = 12 ω2 − dt ∧ Im(Ω).
Let I be the EDS generated by the closed 4-form dσ and 5-form dφ.Then I is involutive, with characters (s1, . . . , s7) = (0, 0, 1, 4, 10, 13, 0).
Since d(Re(Ω)
)= d(1
2 ω2) = 0, the given SU(3)-structure defines a reg-ular integral manifold L ⊂ X of I lying in the hypersurface t = 0. By theCartan-Kahler Theorem, L lies in a unique I-integral M7 ⊂ X. QED
Theorem: A real-analytic SU(3)-structure on N6 is induced by embeddinginto a G2-holonomy manifold iff its defining forms ω and Ω satisfy
d Re(Ω) = 0 and d(12 ω2) = 0.
Proof: Define a tautological 2-form ω and 3-form Ω on F(N)/ SU(3) asfollows: For a coframe u : TxN → C3, define these forms at [u] = u·SU(3) ∈F(N)/ SU(3) by
ω[u] = π∗(u∗( i2 (tdz ∧dz))
)and Ω[u] = π∗(u∗(dz1 ∧dz2 ∧dz3)
)where π : F(N)/ SU(3) → N is the basepoint projection.
On X = R × F(N)/ SU(3), consider the 3-form and 4-form
σ = dt ∧ω + Re(Ω) and φ = 12 ω2 − dt ∧ Im(Ω).
Let I be the EDS generated by the closed 4-form dσ and 5-form dφ.Then I is involutive, with characters (s1, . . . , s7) = (0, 0, 1, 4, 10, 13, 0).
Since d(Re(Ω)
)= d(1
2ω2) = 0, the given SU(3)-structure defines a reg-
ular integral manifold L ⊂ X of I lying in the hypersurface t = 0. By theCartan-Kahler Theorem, L lies in a unique I-integral M7 ⊂ X. QED
Theorem: A real-analytic SU(3)-structure on N6 is induced by embeddinginto a G2-holonomy manifold iff its defining forms ω and Ω satisfy
d Re(Ω) = 0 and d(12 ω2) = 0.
Proof: Define a tautological 2-form ω and 3-form Ω on F(N)/ SU(3) asfollows: For a coframe u : TxN → C3, define these forms at [u] = u·SU(3) ∈F(N)/ SU(3) by
ω[u] = π∗(u∗( i2 (tdz ∧dz))
)and Ω[u] = π∗(u∗(dz1 ∧dz2 ∧dz3)
)where π : F(N)/ SU(3) → N is the basepoint projection.
On X = R × F(N)/ SU(3), consider the 3-form and 4-form
σ = dt ∧ω + Re(Ω) and φ = 12 ω2 − dt ∧ Im(Ω).
Let I be the EDS generated by the closed 4-form dσ and 5-form dφ.Then I is involutive, with characters (s1, . . . , s7) = (0, 0, 1, 4, 10, 13, 0).
Since d(Re(Ω)
)= d(1
2 ω2) = 0, the given SU(3)-structure defines a reg-ular integral manifold L ⊂ X of I lying in the hypersurface t = 0. By theCartan-Kahler Theorem, L lies in a unique I-integral M7 ⊂ X. QED
Theorem: A real-analytic SU(3)-structure on N6 is induced by embeddinginto a G2-holonomy manifold iff its defining forms ω and Ω satisfy
d Re(Ω) = 0 and d(12 ω2) = 0.
Proof: Define a tautological 2-form ω and 3-form Ω on F(N)/ SU(3) asfollows: For a coframe u : TxN → C3, define these forms at [u] = u·SU(3) ∈F(N)/ SU(3) by
ω[u] = π∗(u∗( i2 (tdz ∧dz))
)and Ω[u] = π∗(u∗(dz1 ∧dz2 ∧dz3)
)where π : F(N)/ SU(3) → N is the basepoint projection.
On X = R × F(N)/ SU(3), consider the 3-form and 4-form
σ = dt ∧ω + Re(Ω) and φ = 12 ω2 − dt ∧ Im(Ω).
Let I be the EDS generated by the closed 4-form dσ and 5-form dφ.Then I is involutive, with characters (s1, . . . , s7) = (0, 0, 1, 4, 10, 13, 0).
Since d(Re(Ω)
)= d(1
2 ω2) = 0, the given SU(3)-structure defines a reg-ular integral manifold L ⊂ X of I lying in the hypersurface t = 0. By theCartan-Kahler Theorem, L lies in a unique I-integral M7 ⊂ X. QED
Theorem: A real-analytic SU(3)-structure on N6 is induced by embeddinginto a G2-holonomy manifold iff its defining forms ω and Ω satisfy
d Re(Ω) = 0 and d(12 ω2) = 0.
Proof: Define a tautological 2-form ω and 3-form Ω on F(N)/ SU(3) asfollows: For a coframe u : TxN → C3, define these forms at [u] = u·SU(3) ∈F(N)/ SU(3) by
ω[u] = π∗(u∗( i2 (tdz ∧dz))
)and Ω[u] = π∗(u∗(dz1 ∧dz2 ∧dz3)
)where π : F(N)/ SU(3) → N is the basepoint projection.
On X = R × F(N)/ SU(3), consider the 3-form and 4-form
σ = dt ∧ω + Re(Ω) and φ = 12 ω2 − dt ∧ Im(Ω).
Let I be the EDS generated by the closed 4-form dσ and 5-form dφ.Then I is involutive, with characters (s1, . . . , s7) = (0, 0, 1, 4, 10, 13, 0).
Since d(Re(Ω)
)= d(1
2 ω2) = 0, the given SU(3)-structure defines a reg-ular integral manifold L ⊂ X of I lying in the hypersurface t = 0. By theCartan-Kahler Theorem, L lies in a unique I-integral M7 ⊂ X. QED
Theorem: A real-analytic SU(3)-structure on N6 is induced by embeddinginto a G2-holonomy manifold iff its defining forms ω and Ω satisfy
d Re(Ω) = 0 and d(12 ω2) = 0.
Proof: Define a tautological 2-form ω and 3-form Ω on F(N)/ SU(3) asfollows: For a coframe u : TxN → C3, define these forms at [u] = u·SU(3) ∈F(N)/ SU(3) by
ω[u] = π∗(u∗( i2 (tdz ∧dz))
)and Ω[u] = π∗(u∗(dz1 ∧dz2 ∧dz3)
)where π : F(N)/ SU(3) → N is the basepoint projection.
On X = R × F(N)/ SU(3), consider the 3-form and 4-form
σ = dt ∧ω + Re(Ω) and φ = 12 ω2 − dt ∧ Im(Ω).
Let I be the EDS generated by the closed 4-form dσ and 5-form dφ.Then I is involutive, with characters (s1, . . . , s7) = (0, 0, 1, 4, 10, 13, 0).
Since d(Re(Ω)
)= d(1
2 ω2) = 0, the given SU(3)-structure defines a reg-ular integral manifold L ⊂ X of I lying in the hypersurface t = 0. By theCartan-Kahler Theorem, L lies in a unique I-integral M7 ⊂ X. QED
Theorem: There exist non-real-analytic SU(3)-structures on N6 whoseassociated forms satisfy
d(Re(Ω)
)= d(1
2 ω2) = 0
but that are not induced from an immersion into a G2-holonomy Riemann-ian manifold (M, g). In fact, if such a non-analytic SU(3)-structure satisfies
∗(ω ∧ d
(Im(Ω)
))= C
where C is a constant, then it cannot be G2-immersed. (Such do exist.)
Proof: When an SU(3)-structure on N6 with forms (ω, Ω) is induced viaa G2-immersion N6 → M7, the mean curvature H of N in M is givenby −12H = ∗
(ω∧d
(Im(Ω)
)). Thus, when this latter function is constant it
follows, by elliptic regularity, that N6 is a real-analytic submanifold of thereal-analytic (M7, g). If the SU(3)-structure is not real-analytic, this is acontradiction.
It remains to construct such an example.
Theorem: There exist non-real-analytic SU(3)-structures on N6 whoseassociated forms satisfy
d(Re(Ω)
)= d(1
2 ω2) = 0
but that are not induced from an immersion into a G2-holonomy Riemann-ian manifold (M, g). In fact, if such a non-analytic SU(3)-structure satisfies
∗(ω ∧ d
(Im(Ω)
))= C
where C is a constant, then it cannot be G2-immersed.(Such do exist.)
Proof: When an SU(3)-structure on N6 with forms (ω, Ω) is induced viaa G2-immersion N6 → M7, the mean curvature H of N in M is givenby −12H = ∗
(ω∧d
(Im(Ω)
)). Thus, when this latter function is constant it
follows, by elliptic regularity, that N6 is a real-analytic submanifold of thereal-analytic (M7, g). If the SU(3)-structure is not real-analytic, this is acontradiction.
It remains to construct such an example.
Theorem: There exist non-real-analytic SU(3)-structures on N6 whoseassociated forms satisfy
d(Re(Ω)
)= d(1
2 ω2) = 0
but that are not induced from an immersion into a G2-holonomy Riemann-ian manifold (M, g). In fact, if such a non-analytic SU(3)-structure satisfies
∗(ω ∧ d
(Im(Ω)
))= C
where C is a constant, then it cannot be G2-immersed. (Such do exist.)
Proof: When an SU(3)-structure on N6 with forms (ω, Ω) is induced viaa G2-immersion N6 → M7, the mean curvature H of N in M is givenby −12H = ∗
(ω∧d
(Im(Ω)
)). Thus, when this latter function is constant it
follows, by elliptic regularity, that N6 is a real-analytic submanifold of thereal-analytic (M7, g). If the SU(3)-structure is not real-analytic, this is acontradiction.
It remains to construct such an example.
Theorem: There exist non-real-analytic SU(3)-structures on N6 whoseassociated forms satisfy
d(Re(Ω)
)= d(1
2 ω2) = 0
but that are not induced from an immersion into a G2-holonomy Riemann-ian manifold (M, g). In fact, if such a non-analytic SU(3)-structure satisfies
∗(ω ∧ d
(Im(Ω)
))= C
where C is a constant, then it cannot be G2-immersed. (Such do exist.)
Proof: When an SU(3)-structure on N6 with forms (ω, Ω) is induced viaa G2-immersion N6 → M7, the mean curvature H of N in M is givenby −12H = ∗
(ω∧d
(Im(Ω)
)). Thus, when this latter function is constant it
follows, by elliptic regularity, that N6 is a real-analytic submanifold of thereal-analytic (M7, g). If the SU(3)-structure is not real-analytic, this is acontradiction.
It remains to construct such an example.
Theorem: There exist non-real-analytic SU(3)-structures on N6 whoseassociated forms satisfy
d(Re(Ω)
)= d(1
2 ω2) = 0
but that are not induced from an immersion into a G2-holonomy Riemann-ian manifold (M, g). In fact, if such a non-analytic SU(3)-structure satisfies
∗(ω ∧ d
(Im(Ω)
))= C
where C is a constant, then it cannot be G2-immersed. (Such do exist.)
Proof: When an SU(3)-structure on N6 with forms (ω, Ω) is induced viaa G2-immersion N6 → M7, the mean curvature H of N in M is givenby −12H = ∗
(ω∧d
(Im(Ω)
)). Thus, when this latter function is constant it
follows, by elliptic regularity, that N6 is a real-analytic submanifold of thereal-analytic (M7, g). If the SU(3)-structure is not real-analytic, this is acontradiction.
It remains to construct such an example.
Theorem: There exist non-real-analytic SU(3)-structures on N6 whoseassociated forms satisfy
d(Re(Ω)
)= d(1
2 ω2) = 0
but that are not induced from an immersion into a G2-holonomy Riemann-ian manifold (M, g). In fact, if such a non-analytic SU(3)-structure satisfies
∗(ω ∧ d
(Im(Ω)
))= C
where C is a constant, then it cannot be G2-immersed. (Such do exist.)
Proof: When an SU(3)-structure on N6 with forms (ω, Ω) is induced viaa G2-immersion N6 → M7, the mean curvature H of N in M is givenby −12H = ∗
(ω∧d
(Im(Ω)
)). Thus, when this latter function is constant it
follows, by elliptic regularity, that N6 is a real-analytic submanifold of thereal-analytic (M7, g). If the SU(3)-structure is not real-analytic, this is acontradiction.
It remains to construct such an example.
Why it’s somewhat delicate:Since dim(GL(6, R)/ SU(3)
)= 28, a choice
of an SU(3)-structure (ω, Ω) on N6 depends on 28 functions of 6 variables.Modulo diffeomorphisms, this leaves 22 functions of 6 variables.
On the other hand, the equations
d(Re(Ω)
)= 0, d(1
2 ω2) = 0, ∗(ω ∧d
(Im(Ω)
))= C
constitute 15 + 6 + 1 = 22 equations for the SU(3)-structure.
Fix an orientation of N6. Say that a 3-form φ ∈ Ω3(N6) is elliptic if, ateach point, it is linearly equivalent to Re
(dz1∧dz2∧dz3
). Such a φ defines
a unique, orientation-preserving almost-complex structure Jφ on N6 suchthat
Ωφ = φ + i J∗φ(φ)
is of Jφ-type (3, 0).
Now assume that φ is also closed. Then dΩφ is purely imaginary andyet must be a sum of terms of Jφ-type (3, 1) and (2, 2).
Thus, dΩφ is purely of Jφ-type (2, 2).
Why it’s somewhat delicate: Since dim(GL(6, R)/ SU(3)
)= 28, a
choice of an SU(3)-structure (ω, Ω) on N6 depends on 28 functions of 6variables. Modulo diffeomorphisms, this leaves 22 functions of 6 variables.
On the other hand, the equations
d(Re(Ω)
)= 0, d(1
2 ω2) = 0, ∗(ω ∧d
(Im(Ω)
))= C
constitute 15 + 6 + 1 = 22 equations for the SU(3)-structure.
Fix an orientation of N6. Say that a 3-form φ ∈ Ω3(N6) is elliptic if, ateach point, it is linearly equivalent to Re
(dz1∧dz2∧dz3
). Such a φ defines
a unique, orientation-preserving almost-complex structure Jφ on N6 suchthat
Ωφ = φ + i J∗φ(φ)
is of Jφ-type (3, 0).
Now assume that φ is also closed. Then dΩφ is purely imaginary andyet must be a sum of terms of Jφ-type (3, 1) and (2, 2).
Thus, dΩφ is purely of Jφ-type (2, 2).
Why it’s somewhat delicate: Since dim(GL(6, R)/ SU(3)
)= 28, a
choice of an SU(3)-structure (ω, Ω) on N6 depends on 28 functions of 6variables. Modulo diffeomorphisms, this leaves 22 functions of 6 variables.
On the other hand, the equations
d(Re(Ω)
)= 0, d(1
2 ω2) = 0, ∗(ω ∧d
(Im(Ω)
))= C
constitute 15 + 6 + 1 = 22 equations for the SU(3)-structure.
Fix an orientation of N6. Say that a 3-form φ ∈ Ω3(N6) is elliptic if, ateach point, it is linearly equivalent to Re
(dz1∧dz2∧dz3
). Such a φ defines
a unique, orientation-preserving almost-complex structure Jφ on N6 suchthat
Ωφ = φ + i J∗φ(φ)
is of Jφ-type (3, 0).
Now assume that φ is also closed. Then dΩφ is purely imaginary andyet must be a sum of terms of Jφ-type (3, 1) and (2, 2).
Thus, dΩφ is purely of Jφ-type (2, 2).
Why it’s somewhat delicate: Since dim(GL(6, R)/ SU(3)
)= 28, a
choice of an SU(3)-structure (ω, Ω) on N6 depends on 28 functions of 6variables. Modulo diffeomorphisms, this leaves 22 functions of 6 variables.
On the other hand, the equations
d(Re(Ω)
)= 0, d(1
2 ω2) = 0, ∗(ω ∧d
(Im(Ω)
))= C
constitute 15 + 6 + 1 = 22 equations for the SU(3)-structure.
Fix an orientation of N6. Say that a 3-form φ ∈ Ω3(N6) is elliptic if, ateach point, it is linearly equivalent to Re
(dz1∧dz2∧dz3
). Such a φ defines
a unique, orientation-preserving almost-complex structure Jφ on N6 suchthat
Ωφ = φ + i J∗φ(φ)
is of Jφ-type (3, 0).
Now assume that φ is also closed. Then dΩφ is purely imaginary andyet must be a sum of terms of Jφ-type (3, 1) and (2, 2).
Thus, dΩφ is purely of Jφ-type (2, 2).
Why it’s somewhat delicate: Since dim(GL(6, R)/ SU(3)
)= 28, a
choice of an SU(3)-structure (ω, Ω) on N6 depends on 28 functions of 6variables. Modulo diffeomorphisms, this leaves 22 functions of 6 variables.
On the other hand, the equations
d(Re(Ω)
)= 0, d(1
2 ω2) = 0, ∗(ω ∧d
(Im(Ω)
))= C
constitute 15 + 6 + 1 = 22 equations for the SU(3)-structure.
Fix an orientation of N6. Say that a 3-form φ ∈ Ω3(N6) is elliptic if, ateach point, it is linearly equivalent to Re
(dz1∧dz2∧dz3
). Such a φ defines
a unique, orientation-preserving almost-complex structure Jφ on N6 suchthat
Ωφ = φ + i J∗φ(φ)
is of Jφ-type (3, 0).
Now assume that φ is also closed. Then dΩφ is purely imaginary andyet must be a sum of terms of Jφ-type (3, 1) and (2, 2).
Thus, dΩφ is purely of Jφ-type (2, 2).
Why it’s somewhat delicate: Since dim(GL(6, R)/ SU(3)
)= 28, a
choice of an SU(3)-structure (ω, Ω) on N6 depends on 28 functions of 6variables. Modulo diffeomorphisms, this leaves 22 functions of 6 variables.
On the other hand, the equations
d(Re(Ω)
)= 0, d(1
2 ω2) = 0, ∗(ω ∧d
(Im(Ω)
))= C
constitute 15 + 6 + 1 = 22 equations for the SU(3)-structure.
Fix an orientation of N6. Say that a 3-form φ ∈ Ω3(N6) is elliptic if, ateach point, it is linearly equivalent to Re
(dz1∧dz2∧dz3
). Such a φ defines
a unique, orientation-preserving almost-complex structure Jφ on N6 suchthat
Ωφ = φ + i J∗φ(φ)
is of Jφ-type (3, 0).
Now assume that φ is also closed. Then dΩφ is purely imaginary andyet must be a sum of terms of Jφ-type (3, 1) and (2, 2).
Thus, dΩφ is purely of Jφ-type (2, 2).
Why it’s somewhat delicate: Since dim(GL(6, R)/ SU(3)
)= 28, a
choice of an SU(3)-structure (ω, Ω) on N6 depends on 28 functions of 6variables. Modulo diffeomorphisms, this leaves 22 functions of 6 variables.
On the other hand, the equations
d(Re(Ω)
)= 0, d(1
2 ω2) = 0, ∗(ω ∧d
(Im(Ω)
))= C
constitute 15 + 6 + 1 = 22 equations for the SU(3)-structure.
Fix an orientation of N6. Say that a 3-form φ ∈ Ω3(N6) is elliptic if, ateach point, it is linearly equivalent to Re
(dz1∧dz2∧dz3
). Such a φ defines
a unique, orientation-preserving almost-complex structure Jφ on N6 suchthat
Ωφ = φ + i J∗φ(φ)
is of Jφ-type (3, 0).
Now assume that φ is also closed. Then dΩφ is purely imaginary andyet must be a sum of terms of Jφ-type (3, 1) and (2, 2).
Thus, dΩφ is purely of Jφ-type (2, 2).

So far: φ ∈ Ω3e(N
6) defines Jφ and Ωφ = φ + i J∗φ(φ) ∈ Ω3,0(N, Jφ).
dφ = 0 then yields dΩφ ∈ Ω2,2(N, Jφ).
So far: φ ∈ Ω3e(N
6) defines Jφ and Ωφ = φ + i J∗φ(φ) ∈ Ω3,0(N, Jφ).
dφ = 0 then yields dΩφ ∈ Ω2,2(N, Jφ).
Fix a constant C = 0. It is a C1-open condition on φ that
dΩφ = i6C (ωφ)2 for some ωφ = ωφ ∈ Ω1,1
+ (N, Jφ).
So far: φ ∈ Ω3e(N
6) defines Jφ and Ωφ = φ + i J∗φ(φ) ∈ Ω3,0(N, Jφ).
dφ = 0 then yields dΩφ ∈ Ω2,2(N, Jφ).
Fix a constant C = 0. It is a C1-open condition on φ that
dΩφ = i6C (ωφ)2 for some ωφ = ωφ ∈ Ω1,1
+ (N, Jφ).
Now, the pair (ωφ, Ωφ) are the defining forms of an SU(3)-structure on Nif and only if
16(ωφ)3 − 1
8 i Ωφ ∧ Ωφ = 0.
This is a single, first-order scalar equation on the closed 3-form φ. It iseasy to see that there are non-analytic solutions. Assuming this conditionis satisfied:
d(ReΩφ) = dφ = 0,
andd(
12 (ωφ)2
)= d
(−3i 1
C dΩφ
)= 0,
and, finally
∗φ
(ωφ ∧d(Im Ωφ)
)= ∗φ
(ωφ ∧ 1
6C (ωφ)2)
= C.
So far: φ ∈ Ω3e(N
6) defines Jφ and Ωφ = φ + i J∗φ(φ) ∈ Ω3,0(N, Jφ).
dφ = 0 then yields dΩφ ∈ Ω2,2(N, Jφ).
Fix a constant C = 0. It is a C1-open condition on φ that
dΩφ = i6C (ωφ)2 for some ωφ = ωφ ∈ Ω1,1
+ (N, Jφ).
Now, the pair (ωφ, Ωφ) are the defining forms of an SU(3)-structure on Nif and only if
16(ωφ)3 − 1
8 i Ωφ ∧ Ωφ = 0.
This is a single, first-order scalar equation on the closed 3-form φ. It iseasy to see that there are non-analytic solutions.Assuming this condition issatisfied:
d(ReΩφ) = dφ = 0,
andd(
12 (ωφ)2
)= d
(−3i 1
C dΩφ
)= 0,
and, finally
∗φ
(ωφ ∧d(Im Ωφ)
)= ∗φ
(ωφ ∧ 1
6C (ωφ)2)
= C.
So far: φ ∈ Ω3e(N
6) defines Jφ and Ωφ = φ + i J∗φ(φ) ∈ Ω3,0(N, Jφ).
dφ = 0 then yields dΩφ ∈ Ω2,2(N, Jφ).
Fix a constant C = 0. It is a C1-open condition on φ that
dΩφ = i6C (ωφ)2 for some ωφ = ωφ ∈ Ω1,1
+ (N, Jφ).
Now, the pair (ωφ, Ωφ) are the defining forms of an SU(3)-structure on Nif and only if
16(ωφ)3 − 1
8 i Ωφ ∧ Ωφ = 0.
This is a single, first-order scalar equation on the closed 3-form φ. It iseasy to see that there are non-analytic solutions. Assuming this conditionis satisfied:
d(ReΩφ) = dφ = 0,
andd(
12 (ωφ)2
)= d
(−3i 1
C dΩφ
)= 0,
and, finally
∗φ
(ωφ ∧d(Im Ωφ)
)= ∗φ
(ωφ ∧ 1
6C (ωφ)2)
= C.
Interpretation: On N6×R, with (ω, Ω) defining an SU(3)-structure on N6
depending on t ∈ R, consider the equations
d(dt ∧ ω + Re(Ω)
)= 0 and d
(12 ω2 − dt ∧ Im(Ω)
)= 0.
Think of Ω as φ+iJ∗φ(φ), so the SU(3)-structure is determined by (ω, φ)
where φ = Re(Ω). The closure conditions for fixed t are
dφ = 0 and d(ω2) = 0,
and the G2-evolution equations for such (ω, φ) are thenddt
(φ) = dω andddt
(ω) = −Lω−1
(d(J∗
φ(φ)))
,
where Lω : Ω2(N) → Ω4(N) is the invertible map Lω(β) = ω∧β.
The discussion shows that this ‘G2-flow’ does exist for analytic initialSU(3)-structures satisfying the closure conditions, but may not exist fornon-analytic initial SU(3)-structures satisfying the closure conditions.
Interpretation: On N6×R, with (ω, Ω) defining an SU(3)-structure on N6
depending on t ∈ R, consider the equations
d(dt ∧ ω + Re(Ω)
)= 0 and d
(12 ω2 − dt ∧ Im(Ω)
)= 0.
Think of Ω as φ+iJ∗φ(φ), so the SU(3)-structure is determined by (ω, φ)
where φ = Re(Ω). The closure conditions for fixed t are
dφ = 0 and d(ω2) = 0,
and the G2-evolution equations for such (ω, φ) are thenddt
(φ) = dω andddt
(ω) = −Lω−1
(d(J∗
φ(φ)))
,
where Lω : Ω2(N) → Ω4(N) is the invertible map Lω(β) = ω∧β.
The discussion shows that this ‘G2-flow’ does exist for analytic initialSU(3)-structures satisfying the closure conditions, but may not exist fornon-analytic initial SU(3)-structures satisfying the closure conditions.
Interpretation: On N6×R, with (ω, Ω) defining an SU(3)-structure on N6
depending on t ∈ R, consider the equations
d(dt ∧ ω + Re(Ω)
)= 0 and d
(12 ω2 − dt ∧ Im(Ω)
)= 0.
Think of Ω as φ+iJ∗φ(φ), so the SU(3)-structure is determined by (ω, φ)
where φ = Re(Ω). The closure conditions for fixed t are
dφ = 0 and d(ω2) = 0,
and the G2-evolution equations for such (ω, φ) are thenddt
(φ) = dω andddt
(ω) = −Lω−1
(d(J∗
φ(φ)))
,
where Lω : Ω2(N) → Ω4(N) is the invertible map Lω(β) = ω∧β.
The discussion shows that this ‘G2-flow’ does exist for analytic initialSU(3)-structures satisfying the closure conditions, but may not exist fornon-analytic initial SU(3)-structures satisfying the closure conditions.
The Spin(7) case. The group Spin(7) ⊂ SO(8) is the GL(8, R)-stabilizerof a 4-form Φ0 ∈ Λ4(R8).
Thus, a Spin(7)-structure on M8 is a 4-form Φ ∈ Ω4(M) that is linearlyequivalent to Φ0 at every point of M . Such a structure Φ determines ametric gΦ and orientation ∗Φ. Moreover, Φ is gΦ-parallel iff dΦ = 0.
Define a 4-form Φ on F(M)/ Spin(7) by the rule: For u : TxM → R8
and [u] = u · Spin(7)Φ[u] = π∗(u∗Φ0
)where π : F(M) → M is the basepoint projection. Let I be the idealon F(M)/ Spin(7) generated by dΦ.
Theorem: (B—) I is involutive. Modulo diffeomorphisms, the generalI-integral Φ depends on 12 functions of 7 variables and the holonomy ofthe corresponding metric gΦ is equal to Spin(7).
The Spin(7) case. The group Spin(7) ⊂ SO(8) is the GL(8, R)-stabilizerof a 4-form Φ0 ∈ Λ4(R8).
Thus, a Spin(7)-structure on M8 is a 4-form Φ ∈ Ω4(M) that is linearlyequivalent to Φ0 at every point of M . Such a structure Φ determines ametric gΦ and orientation ∗Φ. Moreover, Φ is gΦ-parallel iff dΦ = 0.
Define a 4-form Φ on F(M)/ Spin(7) by the rule: For u : TxM → R8
and [u] = u · Spin(7)Φ[u] = π∗(u∗Φ0
)where π : F(M) → M is the basepoint projection. Let I be the idealon F(M)/ Spin(7) generated by dΦ.
Theorem: (B—) I is involutive. Modulo diffeomorphisms, the generalI-integral Φ depends on 12 functions of 7 variables and the holonomy ofthe corresponding metric gΦ is equal to Spin(7).
The Spin(7) case. The group Spin(7) ⊂ SO(8) is the GL(8, R)-stabilizerof a 4-form Φ0 ∈ Λ4(R8).
Thus, a Spin(7)-structure on M8 is a 4-form Φ ∈ Ω4(M) that is linearlyequivalent to Φ0 at every point of M . Such a structure Φ determines ametric gΦ and orientation ∗Φ. Moreover, Φ is gΦ-parallel iff dΦ = 0.
Define a 4-form Φ on F(M)/ Spin(7) by the rule: For u : TxM → R8
and [u] = u · Spin(7)Φ[u] = π∗(u∗Φ0
)where π : F(M) → M is the basepoint projection. Let I be the idealon F(M)/ Spin(7) generated by dΦ.
Theorem: (B—) I is involutive. Modulo diffeomorphisms, the generalI-integral Φ depends on 12 functions of 7 variables and the holonomy ofthe corresponding metric gΦ is equal to Spin(7).
The Spin(7) case. The group Spin(7) ⊂ SO(8) is the GL(8, R)-stabilizerof a 4-form Φ0 ∈ Λ4(R8).
Thus, a Spin(7)-structure on M8 is a 4-form Φ ∈ Ω4(M) that is linearlyequivalent to Φ0 at every point of M . Such a structure Φ determines ametric gΦ and orientation ∗Φ. Moreover, Φ is gΦ-parallel iff dΦ = 0.
Define a 4-form Φ on F(M)/ Spin(7) by the rule: For u : TxM → R8
and [u] = u · Spin(7)Φ[u] = π∗(u∗Φ0
)where π : F(M) → M is the basepoint projection. Let I be the idealon F(M)/ Spin(7) generated by dΦ.
Theorem: (B—) I is involutive. Modulo diffeomorphisms, the generalI-integral Φ depends on 12 functions of 7 variables and the holonomy ofthe corresponding metric gΦ is equal to Spin(7).
The Spin(7) case. The group Spin(7) ⊂ SO(8) is the GL(8, R)-stabilizerof a 4-form Φ0 ∈ Λ4(R8).
Thus, a Spin(7)-structure on M8 is a 4-form Φ ∈ Ω4(M) that is linearlyequivalent to Φ0 at every point of M . Such a structure Φ determines ametric gΦ and orientation ∗Φ. Moreover, Φ is gΦ-parallel iff dΦ = 0.
Define a 4-form Φ on F(M)/ Spin(7) by the rule: For u : TxM → R8
and [u] = u · Spin(7)Φ[u] = π∗(u∗Φ0
)where π : F(M) → M is the basepoint projection. Let I be the idealon F(M)/ Spin(7) generated by dΦ.
Theorem: (B—) I is involutive. Modulo diffeomorphisms, the generalI-integral Φ depends on 12 functions of 7 variables and the holonomy ofthe corresponding metric gΦ is equal to Spin(7).
Hypersurfaces. Spin(7) acts transitively on S7 and the stabilizer of apoint is G2.
An oriented hypersurface N7 ⊂ M8 inherits a G2-structure defined bythe rule
σ = n Φ and satisfies ∗σσ = N∗Φwhere n is the oriented normal vector field along N . One easily checks that
∗σ
(σ ∧ dσ
)= 28H
where H is the mean curvature of N in M .
Theorem: If σ ∈ Ω3+(N7) is real-analytic and satisfies d(∗σσ) = 0, then σ
is induced by an essentially unique Spin(7)-immersion.
Proof: Construct the obvious ideal I on R × F(N)/G2. It is involu-tive with characters (s1, . . . , s8) = (0, 0, 0, 1, 4, 10, 20, 0). The co-closed G2-structure σ defines a regular I-integral in the locus t = 0 which, by theCartan-Kaher Theorem, lies in an essentially unique I-integral M8. QED
Hypersurfaces. Spin(7) acts transitively on S7 and the stabilizer of apoint is G2.
An oriented hypersurface N7 ⊂ M8 inherits a G2-structure defined bythe rule
σ = n Φ and satisfies ∗σσ = N∗Φwhere n is the oriented normal vector field along N . One easily checks that
∗σ
(σ ∧ dσ
)= 28H
where H is the mean curvature of N in M .
Theorem: If σ ∈ Ω3+(N7) is real-analytic and satisfies d(∗σσ) = 0, then σ
is induced by an essentially unique Spin(7)-immersion.
Proof: Construct the obvious ideal I on R × F(N)/G2. It is involu-tive with characters (s1, . . . , s8) = (0, 0, 0, 1, 4, 10, 20, 0). The co-closed G2-structure σ defines a regular I-integral in the locus t = 0 which, by theCartan-Kaher Theorem, lies in an essentially unique I-integral M8. QED
Hypersurfaces. Spin(7) acts transitively on S7 and the stabilizer of apoint is G2.
An oriented hypersurface N7 ⊂ M8 inherits a G2-structure defined bythe rule
σ = n Φ and satisfies ∗σσ = N∗Φwhere n is the oriented normal vector field along N . One easily checks that
∗σ
(σ ∧ dσ
)= 28H
where H is the mean curvature of N in M .
Theorem: If σ ∈ Ω3+(N7) is real-analytic and satisfies d(∗σσ) = 0, then σ
is induced by an essentially unique Spin(7)-immersion.
Proof: Construct the obvious ideal I on R × F(N)/G2. It is involu-tive with characters (s1, . . . , s8) = (0, 0, 0, 1, 4, 10, 20, 0). The co-closed G2-structure σ defines a regular I-integral in the locus t = 0 which, by theCartan-Kaher Theorem, lies in an essentially unique I-integral M8. QED
Hypersurfaces. Spin(7) acts transitively on S7 and the stabilizer of apoint is G2.
An oriented hypersurface N7 ⊂ M8 inherits a G2-structure defined bythe rule
σ = n Φ and satisfies ∗σσ = N∗Φwhere n is the oriented normal vector field along N . One easily checks that
∗σ
(σ ∧ dσ
)= 28H
where H is the mean curvature of N in M .
Theorem: If σ ∈ Ω3+(N7) is real-analytic and satisfies d(∗σσ) = 0, then σ
is induced by an essentially unique Spin(7)-immersion.
Proof: Construct the obvious ideal I on R × F(N)/G2. It is involu-tive with characters (s1, . . . , s8) = (0, 0, 0, 1, 4, 10, 20, 0). The co-closed G2-structure σ defines a regular I-integral in the locus t = 0 which, by theCartan-Kaher Theorem, lies in an essentially unique I-integral M8. QED
Hypersurfaces. Spin(7) acts transitively on S7 and the stabilizer of apoint is G2.
An oriented hypersurface N7 ⊂ M8 inherits a G2-structure defined bythe rule
σ = n Φ and satisfies ∗σσ = N∗Φwhere n is the oriented normal vector field along N . One easily checks that
∗σ
(σ ∧ dσ
)= 28H
where H is the mean curvature of N in M .
Theorem: If σ ∈ Ω3+(N7) is real-analytic and satisfies d(∗σσ) = 0, then σ
is induced by an essentially unique Spin(7)-immersion.
Proof: Construct the obvious ideal I on R × F(N)/G2. It is involu-tive with characters (s1, . . . , s8) = (0, 0, 0, 1, 4, 10, 20, 0). The co-closed G2-structure σ defines a regular I-integral in the locus t = 0 which, by theCartan-Kaher Theorem, lies in an essentially unique I-integral M8. QED
Hypersurfaces. Spin(7) acts transitively on S7 and the stabilizer of apoint is G2.
An oriented hypersurface N7 ⊂ M8 inherits a G2-structure defined bythe rule
σ = n Φ and satisfies ∗σσ = N∗Φwhere n is the oriented normal vector field along N . One easily checks that
∗σ
(σ ∧ dσ
)= 28H
where H is the mean curvature of N in M .
Theorem: If σ ∈ Ω3+(N7) is real-analytic and satisfies d(∗σσ) = 0, then σ
is induced by an essentially unique Spin(7)-immersion.
Proof: Construct the obvious ideal I on R × F(N)/G2. It is involu-tive with characters (s1, . . . , s8) = (0, 0, 0, 1, 4, 10, 20, 0). The co-closed G2-structure σ defines a regular I-integral in the locus t = 0 which, by theCartan-Kaher Theorem, lies in an essentially unique I-integral M8. QED
Theorem: There exist non-real-analytic G2-structures σ ∈ Ω3+(N7) that
satisfyd(∗σσ) = 0
but that are not induced from a Spin(7)-immersion. In fact, if such a non-analytic G2-structure satisfies
∗σ
(σ ∧dσ
)= C
where C is a constant, then it cannot be Spin(7)-immersed. (Such do exist.)
Proof: Same idea as for SU(2). The system of first-order equations
d(∗σσ) = 0, ∗σ
(σ ∧ dσ
)= C, d(∗σdx) = 0
for σ ∈ Ω3+(R7) are only 21 + 1 + 7 = 29 equations for 35 unknowns.
This underdetermined system is not elliptic, but its symbol mappinghas constant rank and it can be embedded into the appropriate sequenceto show that it has non-real-analytic solutions. QED
Theorem: There exist non-real-analytic G2-structures σ ∈ Ω3+(N7) that
satisfyd(∗σσ) = 0
but that are not induced from a Spin(7)-immersion. In fact, if such a non-analytic G2-structure satisfies
∗σ
(σ ∧dσ
)= C
where C is a constant, then it cannot be Spin(7)-immersed. (Such do exist.)
Proof: Same idea as for SU(2). The system of first-order equations
d(∗σσ) = 0, ∗σ
(σ ∧ dσ
)= C, d(∗σdx) = 0
for σ ∈ Ω3+(R7) are only 21 + 1 + 7 = 29 equations for 35 unknowns.
This underdetermined system is not elliptic, but its symbol mappinghas constant rank and it can be embedded into the appropriate sequenceto show that it has non-real-analytic solutions. QED
Theorem: There exist non-real-analytic G2-structures σ ∈ Ω3+(N7) that
satisfyd(∗σσ) = 0
but that are not induced from a Spin(7)-immersion. In fact, if such a non-analytic G2-structure satisfies
∗σ
(σ ∧dσ
)= C
where C is a constant, then it cannot be Spin(7)-immersed. (Such do exist.)
Proof: Same idea as for SU(2). The system of first-order equations
d(∗σσ) = 0, ∗σ
(σ ∧ dσ
)= C, d(∗σdx) = 0
for σ ∈ Ω3+(R7) are only 21 + 1 + 7 = 29 equations for 35 unknowns.
This underdetermined system is not elliptic, but its symbol mappinghas constant rank and it can be embedded into the appropriate sequenceto show that it has non-real-analytic solutions. QED
Theorem: There exist non-real-analytic G2-structures σ ∈ Ω3+(N7) that
satisfyd(∗σσ) = 0
but that are not induced from a Spin(7)-immersion. In fact, if such a non-analytic G2-structure satisfies
∗σ
(σ ∧dσ
)= C
where C is a constant, then it cannot be Spin(7)-immersed. (Such do exist.)
Proof: Same idea as for SU(2). The system of first-order equations
d(∗σσ) = 0, ∗σ
(σ ∧ dσ
)= C, d(∗σdx) = 0
for σ ∈ Ω3+(R7) are only 21 + 1 + 7 = 29 equations for 35 unknowns.
This underdetermined system is not elliptic, but its symbol mappinghas constant rank and it can be embedded into the appropriate sequenceto show that it has non-real-analytic solutions. QED
Theorem: There exist non-real-analytic G2-structures σ ∈ Ω3+(N7) that
satisfyd(∗σσ) = 0
but that are not induced from a Spin(7)-immersion. In fact, if such a non-analytic G2-structure satisfies
∗σ
(σ ∧dσ
)= C
where C is a constant, then it cannot be Spin(7)-immersed. (Such do exist.)
Proof: Same idea as for SU(2). The system of first-order equations
d(∗σσ) = 0, ∗σ
(σ ∧ dσ
)= C, d(∗σdx) = 0
for σ ∈ Ω3+(R7) are only 21 + 1 + 7 = 29 equations for 35 unknowns.
This underdetermined system is not elliptic, but its symbol mappinghas constant rank and it can be embedded into the appropriate sequenceto show that it has non-real-analytic solutions. QED
The evolution equation. On N7 × R the condition
d (dt ∧σ + ∗σσ) = 0
for a t-parametrized family σ ∈ Ω3+(N7) is equivalent to the condition
that d(∗σσ
)= 0 for each fixed t and the evolution equation
ddt
(∗σσ) = dσ.
In terms of σ directly, this evolution equation isddt
(σ) = 14 ∗σ(σ ∧ dσ)σ − ∗σ(dσ).
The above analysis shows that this evolution equation has a (unique)solution for real-analytic initial conditions satisfying d(∗σσ) = 0, but maynot have a solution when the initial condition is not real-analytic.
The evolution equation. On N7 × R the condition
d (dt ∧σ + ∗σσ) = 0
for a t-parametrized family σ ∈ Ω3+(N7) is equivalent to the condition
that d(∗σσ
)= 0 for each fixed t and the evolution equation
ddt
(∗σσ) = dσ.
In terms of σ directly, this evolution equation isddt
(σ) = 14 ∗σ(σ ∧ dσ)σ − ∗σ(dσ).
The above analysis shows that this evolution equation has a (unique)solution for real-analytic initial conditions satisfying d(∗σσ) = 0, but maynot have a solution when the initial condition is not real-analytic.
The evolution equation. On N7 × R the condition
d (dt ∧σ + ∗σσ) = 0
for a t-parametrized family σ ∈ Ω3+(N7) is equivalent to the condition
that d(∗σσ
)= 0 for each fixed t and the evolution equation
ddt
(∗σσ) = dσ.
In terms of σ directly, this evolution equation isddt
(σ) = 14 ∗σ(σ ∧ dσ)σ − ∗σ(dσ).
The above analysis shows that this evolution equation has a (unique)solution for real-analytic initial conditions satisfying d(∗σσ) = 0, but maynot have a solution when the initial condition is not real-analytic.
![arXiv:math/0612545v1 [math.RT] 19 Dec 2006 · arXiv:math/0612545v1 [math.RT] 19 Dec 2006 AN ANALOGUE OF THE CARTAN DECOMPOSITION FOR p-ADIC REDUCTIVE SYMMETRIC SPACES by …](https://static.fdocument.org/doc/165x107/5b9b1d7c09d3f22d2a8ca237/arxivmath0612545v1-mathrt-19-dec-2006-arxivmath0612545v1-mathrt-19.jpg)









![AND SORIN POPA arXiv:0807.4270v2 [math.OA] 29 Jul 2008 · 2 N.OZAWAANDS.POPA measure space II1 factorM= L∞(X)⋊Γ, thevon Neumann subalgebra L∞(X)is a Cartan subalgebra and determining](https://static.fdocument.org/doc/165x107/5c038a7609d3f21e408c480c/and-sorin-popa-arxiv08074270v2-mathoa-29-jul-2008-2-n-measure-space-ii1.jpg)






