From L to N: Nonlinear Predictors in Generalized Models
32
From L to N: Nonlinear Predictors in Generalized Models Heather Turner Independent Statistical/R Consultant owing much to David Firth, University of Warwick Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 1 / 32
-
Upload
htstatistics -
Category
Documents
-
view
348 -
download
2
Transcript of From L to N: Nonlinear Predictors in Generalized Models

From L to N: Nonlinear Predictors in
Generalized Models
Heather Turner
Independent Statistical/R Consultant
owing much toDavid Firth, University of Warwick
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 1 / 32

From L to N
In a GLM we have
g(µ) = β0 + β1x1 + ...+ βpxp
andVar(Y ) = φV (µ)
A generalized nonlinear model (GNM) is the same as a GLMexcept that we have
g(µ) = η(x;β)
where η(x;β) is nonlinear in the parameters β.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 2 / 32

Motivation
GNMs may be thought of as...
... an extension of Nonlinear Least Squares
I using a nonlinear function of a continuous variable to model anon-Gaussian response
... an extension of GLMs
I using nonlinear functions of parameters to produce a moreparsimonious model and interpretable model.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 3 / 32

Example: Mental Health Status
The following contingency table cross-classifies a sample of 1660residents of Manhattan by child’s mental impairment and parents’socioeconomic status (Agresti, 2002)
## MHS
## SES well mild moderate impaired
## A 64 94 58 46
## B 57 94 54 40
## C 57 105 65 60
## D 72 141 77 94
## E 36 97 54 78
## F 21 71 54 71
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 4 / 32

Independence
A simple analysis of these data might be to test for independence ofMHS and SES using a chi-squared test.
This is equivalent to testing the goodness-of-fit of the independencemodel
log(µrc) = αr + βc
Such a test compares the independence model to the saturated model
log(µrc) = αr + βc + γrc
which may be over-complex.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 5 / 32

Row-column Association
One intermediate model is the Row-Column association model:
log(µrc) = αr + βc + φrψc
(Goodman, 1979), an example of a multiplicative interaction model.
For the Mental Health data:
## Analysis of Deviance Table
##
## Model 1: Freq ~ SES + MHS
## Model 2: Freq ~ SES + MHS + Mult(SES , MHS)
## Model 3: Freq ~ SES + MHS + SES:MHS
## Resid. Df Resid. Dev Df Deviance Pr(>Chi)
## 1 15 47.4
## 2 8 3.6 7 43.8 2.3e-07
## 3 0 0.0 8 3.6 0.89
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 6 / 32

Parameterisation
The independence model was defined earlier in an over-parameterisedform:
log(µrc) = αr + βc
= (αr + 1) + (βc − 1)
= α∗r + β∗
c
Identifiability constraints may be imposedI to fix a one-to-one mapping between parameter values and
distributions
I to enable interpretation of parameters
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 7 / 32

Standard Implementation
The standard approach of all major statistical software packages is toapply the identifiability constraints in the construction of the model
g(µ) =Xβ
so that rank(X) is equal to the number of parameters p.
Then the inverse in the score equations of the IWLS algorithm
β(r+1) =(XTW (r)X
)−1
XTW (r)z(r)
exists.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 8 / 32

Alternative Implementation
An alternative is to keep models in their over-parameterised form, sothat rank(X) < p, and use the generalised inverse in the IWLSupdates:
β(r+1) =(XTW (r)X
)−XTW (r)z(r)
This approach is more useful for GNMs, since in this case it is muchharder to define standard rules for specifying identifiabilityconstraints.
Rather, identifiability constraints can be applied post-fitting forinference and interpretation.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 9 / 32

Estimation of GNMs
GNMs present further technical difficulties vs. GLMs
I automatic generation of starting values is hard
I the likelihood may have multiple optima
The default approach used in the gnm package for R is as follows:
I generate starting values randomly for nonlinear parameters andusing a GLM fit for linear parameters
I use one-parameter-at-a-time Newton method to updatenonlinear parameters
I use the generalized IWLS to update all parameters
Consequently, the parameterisation returned is random.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 10 / 32

Parameterisation of RC ModelThe RC model is invariant to changes in scale or location of theinteraction parameters:
log(µrc) = αr + βc + φrψc
= αr + βc + (2φr)(0.5ψc)
= αr + (βc − ψc) + (φr + 1)(ψc)
One way to constrain these parameters is as follows
φ∗r =
φr −∑
r wrφr∑r wr√∑
r wr
(φr −
∑r wrφr∑r wr
)where wr is the row probability, say, so that∑
r
wrφ∗r = 0
∑r
wr(φ∗r)
2 = 1
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 11 / 32

Row and Column Scores
The row and columns scores for the RC model are
## Estimate Std. Error
## Mult(., MHS).SESA 1.11 0.30
## Mult(., MHS).SESB 1.12 0.31
## Mult(., MHS).SESC 0.37 0.32
## Mult(., MHS).SESD -0.03 0.27
## Mult(., MHS).SESE -1.01 0.31
## Mult(., MHS).SESF -1.82 0.28
## Estimate Std. Error
## Mult(SES , .).MHSwell 1.68 0.19
## Mult(SES , .).MHSmild 0.14 0.20
## Mult(SES , .).MHSmoderate -0.14 0.28
## Mult(SES , .).MHSimpaired -1.41 0.17
As one might expect, the scores are ordered for both factors,suggesting the model for the dependence structure might besimplified further.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 12 / 32

Biplot Model
Biplots are graphical displays of data arrays which represent theobjects that index all dimensions of the array on the same plot.
So for a two-way table, a biplot represents both the rows andcolumns at the same time.
The biplot is constructed from a rank-2 representation of the data.Here we consider the generalized bilinear model
g(µij) = α1iβ1j + α2iβ2j
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 13 / 32

Example: Leaf Blotch Data
The proportion of leaf area affected by leaf blotch was recorded for10 varieties of barley grown at nine sites (Gabriel, 1998).
Thus the response is a continuous variable in [0, 1].
Wedderburn (1974) suggested to model these data using a logit linkand a variance proportional to the square of that of the binomial, i.e.V (µ) = µ2(1− µ)2 – a quasi-likelihood model.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 14 / 32

Geometrical Intepretation
Given the bilinear model
logit(µij) = α1iβ1j + α2iβ2j
the effect of site i can be represented by the point
(α1i, α2i)
in the space spanned by the linearly independent basis vectors
a1 = (α11, α12, . . . α19)T
a2 = (α21, α22, . . . α29)T
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 15 / 32

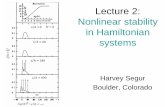
Visualising Sites and Varieties
Thus we can represent the sites and varieties separately as follows
A
B
C
D
EFG
H I
−4 −2 0 2 4
−4
−2
02
4
Site Effects
Component 1
Com
pone
nt 2 1 23
45 6789X
−4 −2 0 2 4
−4
−2
02
4
Variety Effects
Component 1
Com
pone
nt 2
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 16 / 32

Obtaining Orthogonal Bases
Given the SVD of the matrix of predictors
η = UDV T
matrices of orthogonal basis vectors on the same scale are given by
A = UD12 B =D
12V T
The model stays the same, but the parametrization changes.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 17 / 32

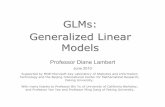
Biplot
ABC
DEFG
H
I
123 4
5
6
7
89 X
−4 −2 0 2 4
−4
−2
02
4
Biplot for barley data
Component 1
Com
pone
nt 2
sites: A−Ivarieties: 1−9, X
ABC
DEFG
H
I
123 4
5
6
7
89 X
−4 −2 0 2 4−
4−
20
24
Biplot for barley data
Component 1
Com
pone
nt 2
sites: A−Ivarieties: 1−9, X v−axis
h−axis
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 18 / 32

Model RefinementThe biplot suggests that the sites could be represented by pointsalong a line, with co-ordinates
(γi, δ0).
and the varieties by points on two lines perpendicular to the site line:
(ν0 + ν1I(i ∈ {2, 3, 6}), ωj)
This corresponds to the following simplification of the bilinear model:
α1iβ1j + α2iβ2j
≈γi(ν0 + ν1I(i ∈ {2, 3, 6})) + δ0ωj
or equivalently
γi(ν0 + ν1I(i ∈ {2, 3, 6})) + ωj,
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 19 / 32

Double Additive Model
Gabriel (1998) described the model derived from the biplot as thedouble additive model.
An analysis of deviance confirms that this model is adequate for theleaf blotch data
## Analysis of Deviance Table
##
## Model 1: y ~ 0 + Mult(site , variety , inst = 1) + Mult(site ,
## variety , inst = 2)
## Model 2: y ~ variety + Mult(site , variety.binary) - 1
## Resid. Df Resid. Dev Df Deviance Pr(>Chi)
## 1 56 41
## 2 71 51 -15 -9.94 0.8
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 20 / 32

Stereotype Model
The stereotype model (Anderson, 1984) is suitable for orderedcategorical data. It is a special case of the multinomial logistic model:
pr(yi = c|xi) =exp(β0c + β
Tc xi)∑
r exp(β0r + βTr xi)
in which only the scale of the relationship with the covariates changesbetween categories:
pr(yi = c|xi) =exp(β0c + γcβ
Txi)∑r exp(β0r + γrβ
Txi)
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 21 / 32

Poisson Trick
The stereotype model can be fitted as a GNM by re-expressing thecategorical data as category counts Yi = (Yi1, . . . , Yik).
Assuming a Poisson distribution for Yic, the joint distribution of Yi isMultinomial(Ni, pi1, . . . , pik) conditional on the total count Ni.
The expected counts are then µic = Nipic and the parameters of thesterotype model can be estimated through fitting
log µic = log(Ni) + log(pic)
= αi + β0c + γc∑r
βrxir
where the “nuisance” parameters αi ensure that the multinomialdenominators are reproduced exactly, as required.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 22 / 32

Augmented Least SquaresA disadvantage of using the Poisson trick is that the number ofnuisance parameters can be large, making computation slow.
The algorithm can be adapted using augmented least squares.
For an ordinary least squares model,
[(y|X)T (y|X)
]−1=
(yTy yTXXTy XTX
)−1
=
(A11 A12
A21 A22
)where A11,A12 and A22 are functions of yTy, XTy and XTX.
Then it can be shown that
β̂ = (XTX)−1XTy = −A21
A11
requiring only the first row (column) of the inverse to be found.Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 23 / 32

Application to Nuisance Parameters I
The same approach can be applied to the IWLS algorithm, letting
X̃ =W12 (z|X)
Now letX̃ = (U |V )
where V is the part of the design matrix corresponding to thenuisance factor.
U is an nk × p matrix where n is the number of nuisance parametersand k is the number of categories and p is the number of modelparameters, typically with n >> p.
V is an nc× n matrix of dummy variables identifying each individual.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 24 / 32

Application to Nuisance Parameters II
Then
(X̃TX̃)− =
(UTU UTVV TU V TV
)−
=
(B11 B12
B21 B22
)
Again, only the first row (column) of this generalised inverse isrequired to estimate β̂, so we are only interested in B11 and B12.
B11 = (UTU −UTV (V TV )−1V TU)−
B12 = −(V TV )−1V TUB11
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 25 / 32

Elimination of the Nuisance Factor
UTU is p× p, therefore not expensive to compute.
V TV and V TU can be computed without constructing the largenk × n matrix V , due to the stucture of V
I V TV is diagonal and the non-zero elements can be computeddirectly
I V TU is equivalent to aggregating the rows of U by levels of thenuisance factor
Thus we only need to construct the U matrix, saving memory andreducing the computational burden
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 26 / 32

Example: Back Pain Data
For 101 patients, 3 prognostic variables were recorded at baseline,then after 3 weeks the level of back pain was recorded (Anderson,1984)
These data were converted to counts, for example for the first record:
## x1 x2 x3 pain count id
## 1 1 1 1 worse 0 1
## 1.1 1 1 1 same 1 1
## 1.2 1 1 1 slight.improvement 0 1
## 1.3 1 1 1 moderate.improvement 0 1
## 1.4 1 1 1 marked.improvement 0 1
## 1.5 1 1 1 complete.relief 0 1
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 27 / 32

Back Pain Model
In this example, the expanded data is not that long (606 records) andthe total number of parameters is only 115 (9 nonlinear), so themodel does not take long to fit (< 1s!).
However, eliminating the linear parameters reduces the computationtime by almost two-thirds, showing the potential of this technique.
Compare the stereotype model to the multinomial logistic model:
## Analysis of Deviance Table
##
## Model 1: count ~ pain + Mult(pain , x1 + x2 + x3) - 1
## Model 2: count ~ pain + pain:x1 + pain:x2 + pain:x3 - 1
## Resid. Df Resid. Dev Df Deviance Pr(>Chi)
## 1 493 303
## 2 485 299 8 4.08 0.85
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 28 / 32

Identifiability Constraints
In order to make the category-specific multipliers identifiable, wemust constrain both the location and scale.
A simple way to do this is to set the first multiplier to zero and fixthe coefficient of the first covariate to one.
## estimate SE quasiSE quasiVar
## worse 0.000 0.000 1.7797 3.16745
## same -3.710 1.826 0.4281 0.18330
## slight.improvement -3.510 1.792 0.4025 0.16198
## moderate.improvement -2.633 1.669 0.5519 0.30454
## marked.improvement -4.612 1.895 0.3133 0.09817
## complete.relief -5.372 2.000 0.4920 0.24202
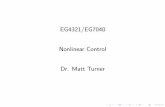
Quasi standard errors (Firth and de Menezes, 2004) are invariant toreference class
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 29 / 32

Comparison Intervals
worse same slightimprovement
moderateimprovment
markedimprovement
completerelief
−6
−4
−2
02
4
Intervals based on quasi standard errors
pain
estim
ate ●
● ●
●
●
●
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 30 / 32

Summary
Moving from GLMs to GNMs present some technical difficulties, butprovides a framework that covers several useful models.
Further examples can be found in the help files and manualaccompanying the gnm package which is available on CRAN.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 31 / 32

References
Agresti, A. (2002). Categorical Data Analysis (2nd ed.). New York: Wiley.
Anderson, J. A. (1984). Regression and Ordered Categorical Variables. J.R. Statist. Soc. B 46(1), 1–30.
Firth, D. and R. X. de Menezes (2004). Quasi-variances. Biometrika 91,65–80.
Gabriel, K. R. (1998). Generalised bilinear regression. Biometrika 85,689–700.
Goodman, L. A. (1979). Simple models for the analysis of association incross-classifications having ordered categories. J. Amer. Statist.Assoc. 74, 537–552.
Wedderburn, R. W. M. (1974). Quasi-likelihood Functions, GeneralizedLinear Models, and the Gauss-Newton Method. Biometrika 61,439–447.
Heather Turner (Independent Consultant) From L to N GLM 40 Years On 2012 32 / 32