First StepstoSmoothManifolds. AnUndergraduateCourseusers.uoa.gr/~evassil/DifGeom.pdf · in Chapter...
114
June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page i First Steps to Smooth Manifolds. An Undergraduate Course Publishers’ page i
Transcript of First StepstoSmoothManifolds. AnUndergraduateCourseusers.uoa.gr/~evassil/DifGeom.pdf · in Chapter...

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page i
First Steps to Smooth Manifolds.An Undergraduate Course
Publishers’ page
i
User
Text Box
ΔΕΙΓΜΑ ΠΡΩΤΗΣ ΓΡΑΦΗΣ ΒΙΒΛΙΟΥ ΥΠΟ ΠΡΟΕΤΟΙΜΑΣΙΑ ΥΠΟΚΕΙΤΑΙ ΣΕ ΑΝΑΘΕΩΡΗΣΗ ΚΑΙ ΔΙΟΡΘΩΣΕΙΣ
User
Text Box
Ε. VASSILIOU - M. PAPATRIANTAFYLLOU

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page ii
Publishers’ page
ii

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page iii
Publishers’ page
iii

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page iv
Publishers’ page
iv

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page v
ΠΡΩΤΟ ΣΚΑΛΙ
. . . . . . . . .
Κι αν είσαι στο σκαλί το πρώτο, πρέπει
νάσαι υπερήφανος κ᾿ ευτυχισμένος.
Εδώ που έφτασες, λίγο δεν είναι
τόσο που έκανες, μεγάλη δόξα.
Κι αυτό ακόμη το σκαλί το πρώτο
πολύ από τον κοινό τον κόσμο απέχει.
. . . . . . . . .
Κ.Π. Καβάφης (1863–1933)
THE FIRST STEP∗
. . . . . . . . .
Just to be on the first step
should make you happy and proud.
To have come this far is no small achievement:
what you have done is a glorious thing.
Even this first step
is a long way above the ordinary world.
. . . . . . . . .
C.P. Cavafy (1863–1933)
∗C. P. Kavafy, Collected Poems. Translated by Edmund Keeley and Philip Sherrard, Prince-
ton University Press, Princeton N. J., 1992.
v

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page vi

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page vii
Preface
A manifold is a sophisticated concept even for
mathematicians. For example, a great mathemati-
cian such as Jacques Hadamard “felt insuperable
difficulty . . . in maintaining more than a rather el-
ementary and superficial knowledge of the theory
of Lie groups”, a notion based on that of a man-
ifold.
S.S. Chern [16, p. 344]
What this book is about. It is a text intended as a rigorous and very detailed in-
troduction to some basic notions of the elementary theory of differential manifolds,
for the benefit of undergraduate and beginning graduate students of mathematics
and physics. It is designed to serve as a preparatory step to more advanced sub-
jects, treated in the differential geometry of smooth manifolds and fiber bundles,
global analysis, symplectic geometry, gauge theory and much more. These subjects
are usually taught in graduate courses, and many excellent books deal with them.
However, advanced undergraduate and beginning graduate students feel a kind of
“shock” (according to some students of ours) when they first get in touch with
the theory of manifolds. Our purpose is to help them to overcome this difficulty,
by working at a leisurely pace, and by giving details which are usually omitted in
a regular graduate course. This may demystify the difficulties implicit in Chern’s
epigraph.
The origins of the book. We both have taught the material included here, for
many years. Part of this material was the core of a compulsory undergraduate course
given, alongside with general topology, functional analysis, and measure theory,
at our Department. In the 2000’s the previous courses became optional, a policy
naturally leading to analogous changes in graduate studies curricula.
Now, more than a decade after this “reform”, many beginning graduate students
in pure mathematics, in physics, and applied fields such as statistics, control theory,
vii

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page viii
viii Preface
PDE’s, economics, computer graphics and the like, where notions of the theory of
smooth manifolds are needed, they regret for not having attended an introductory
course at an earlier stage so that they would be adequately prepared to meet the
harder demands of graduate studies. Urged by such reactions and the favorable
reception of our lecture notes (in Greek), we decided to present them to a wider
audience, in a new, thoroughly revised and expanded version.
Other motives. Beside the above reasons, the book owes its existence to some
thoughts of ours about the present day teaching of differential geometry: In most
Departments of Mathematics, differential geometry focuses, at best, on a brief pre-
sentation of curves and surfaces. Regrettably, there are students having not even
heard the word manifold.
However, after Riemann’s revolutionary vision of geometry and the explosion of
modern physical theories, differential geometry has revealed a universe of unprece-
dented unity and beauty. Therefore, without abandoning Euler, Gauss and many
other glorious ancestors, who paved the way to the present evolution of ideas, we
believe that the student of mathematics and physics should be familiar, as early
as possible, with the elementary aspects of the theory of (smooth) manifolds. The
latter, conceived by Riemann, nowadays should be considered as classical as the
theory of smooth curves and surfaces in R3. Students should understand that the
space-time of General Relativity is not a (vulgar) “4-dimensional space”, but “a
4-dimensional manifold” (equipped with an appropriate metric etc.) Even those
destined to teach in secondary education, they will be helped to aspire future gen-
erations in many ways.
The contents in brief. With the previous thoughts in mind, we have selected a
few introductory topics organized as follows:
Chapter 1 is dealing with smooth (alias differentiable) manifolds. They are sets
which locally look like Euclidean spaces. We do not require any topological struc-
ture beforehand on them Instead, by means of charts and atlases, we build up a
differential structure inducing, in a natural way, a topological structure. If the man-
ifold is already equipped with a topology, a simple criterion ensures whether the
latter coincides or not with the topology induced by the differential structure. We
find this approach more convenient for the beginner. Later on, to avoid unnecessary
repetitions, we impose certain restrictions on the topology of the manifolds. An-
other important notion here is that of the smoothness of maps between manifolds
for which we provide many useful criteria.
Chapter 2 is a detailed study of the tangent spaces and the derived tangent
bundle of a smooth manifold. Tangent vectors are described as equivalence classes
of suitable smooth curves, and, later, as derivations of the algebra of (germs of)
R-valued smooth functions on the manifold. The latter approach, often used as the
primary definition of a tangent vector, seems unmotivated to the novice, whence
our choice to start with the first, more geometrical, (kinematic) approach. With a
little work, the reader will also master derivations which are indispensable in later

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page ix
Preface ix
chapters. Special attention is given to various useful computations. Furthermore,
given a smooth map between manifolds, we define its differential (or tangent map)
by which one extends the ordinary derivative (differential) to the case of manifolds.
We illustrate the calculus thus obtained by proving the analogs of some classical
results in the new context.
In Chapter 3 we study smooth vector fields as sections of the tangent bundle and
describe their differentiability in many useful ways. We explain their relationship
with differential equations and flows. The latter are treated in detail, though some
proofs may be omitted on a first reading. The set of vector fields of a smooth
manifold is an example of a Lie algebra. This is an important algebraic structure,
probably met by the reader for the first time. The Lie algebra of a Lie group (studied
in Chapter 4) is an indispensable tool for the study of the latter groups. Chapter 3
closes with the Lie derivative of vector field.
Chapter 4 is a brief introduction to Lie groups. They provide an important exam-
ple of the intertwining of two different structures; namely, the algebraic structure of
a group with the differential structure of a manifold. The Lie algebra, one-parameter
subgroups, the exponential map, and the adjoint representation of a Lie group are
elaborated in full details. The elementary material included in this chapter is a di-
rect application of the main ideas developed in the previous chapters, in particular
those referring to vector fields and differentials.
Chapter 5 starts with regular submanifolds. Unlike the case of topological spaces,
an arbitrary subset of a manifold is not necessarily a manifold too, unless additional
conditions are satisfied. Immersions and submersions are the next subject. They are
smooth maps that locally look like the natural inclusions and projections, respec-
tively. Although they are elegantly defined by simple properties of their differentials,
their local descriptions need some extra work.
Chapter 6 touches upon the Riemannian structure and linear connections on
smooth manifolds. Roughly speaking, these notions introduce the reader to the
realm of Riemannian geometry, as well as to the theory of connections, one of the
most important tools of the modern geometry of fiber bundles, with important ap-
plications in geometry and physics. From here, one can follow a variety of directions,
according to her/his needs and taste.
Chapter 7 is dealing with differential forms. We approach them in an elementary
way, avoiding the use of tensor fields and exterior algebras. We start with local forms
in Euclidean spaces and then we proceed to the general case of forms on manifolds.
Central notions such as the exterior product, exterior differentiation, the pull-back
and Lie derivatives of differential forms are carefully explained. We also prove the
exactness of the local de Rham complex.
We would like to note that, although we are dealing with finite-dimensional
manifolds, we often try to give coordinate-free proofs. These suggest ways to extend
various results to the (infinite-dimensional) Banach framework, of course under
appropriate modifications.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page x
x Preface
As we see from the preceding description and the table of contents, we have
included (for the sake of completeness) more material than that normally addressed
to undergraduate students. Complicated topics or proofs that can be skipped on a
first reading are included between two black triangles H and N.
The exercises. Each section is followed by exercises. For most of them there are
hints or detailed solutions (depending on their difficulty) given at the end of the
book. The reader is advised to try to deal with them before seeking help in the
solutions. Very few exercises complement the theory and are used in subsequent
parts of the book.
Prerequisites. Since we have tried to write a self-contained text, we have included
two appendices reviewing what is needed here from the general topology and mul-
tivariate calculus. In the case of calculus, the linearity of the derivative is system-
atically used, since this property is a key to further developments. In this respect,
the book also helps the reader to systematize the classical differential calculus and
to see how it is applied to a more abstract context. Naturally, the Jacobian matrix
is indispensable for finite-dimensional computations. On the other hand, although
very little of the general (point-set) topology is needed, application of it to the first
chapter gives the reader a useful perspective from the familiar topology of Rn to
that of an abstract space. Needless to add that basic notions of linear algebra, set
theory and functions surely belong to the elementary background of every student
of mathematics and physics, that is why there is no particular mention of them.
The audience. As already explained, we have in mind (advanced) undergradu-
ate and beginning graduate students of mathematics and physics wishing to be
acquainted, as early as possible, with the material described above. With this back-
ground, they can easily approach more advanced topics such as vector and principal
bundles, connection theory, Riemannian geometry, characteristic classes, symplec-
tic geometry, gauge theory and so on. We note that students with some knowledge
of surface theory will trace in it the origin of many notions of modern differential
geometry. However, the former theory is not required to access our exposition. With
a little effort (from the part of teachers and students) the back-bone of this book
can be covered in one semester, possibly with the omission of certain sections.
About the bibliography. In the last 40 years or so, the literature on the geometry
of manifolds and related topics has been enriched with a considerable collection
of excellent textbooks and specialized treatises, as well as a myriad of research
papers. From this enormous list, we have included here, apart from the sources we
specifically cite in the text, and those we have used as students, teachers and writers,
and –to our opinion– they better serve the purposes of oursthe present approach.
Omissions by no means reflect any disdain. On the contrary, we are deeply indebted
to all the authors whose works have influenced the development of our discipline,
as well as our personal mathematical formation.
Acknowledgments. We are grateful to our teacher and mentor, the late Professor

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page xi
Preface xi
A. Mallios (1932–2014), who first introduced smooth manifolds in the undergraduate
curriculum of our Department. This was an exciting moment for all of us. We also
thank our numerous students, whose questions, comments and suggestions helped
us to give the present form to our preliminary notes (in Greek). Similarly, thanks
are due to many colleagues for discussions about the need of such a book and its
contents. Finally, we are indebted to the Publishers for including our work in this
series.
We will be happy if we succeed to convey to our readers the same excitement we felt
when we first came across the theory of smooth manifolds and modern differential
geometry.
E. V – M. P. Athens, June 2016.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page xii

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page xiii
Contents
Preface vii
1. Differential Structures 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Charts and atlases: formal definitions . . . . . . . . . . . . . . . . . 4
1.3 The canonical topology of a manifold . . . . . . . . . . . . . . . . . 22
1.4 Differentiable maps . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1.5 Bump functions and partitions of unity . . . . . . . . . . . . . . . . 43
2. The tangent bundle 47
2.1 The tangent space . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.2 Differentials or tangent maps . . . . . . . . . . . . . . . . . . . . . 54
2.3 Derivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
2.4 The tangent bundle . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3. Vector fields 91
3.1 Basic concepts and results . . . . . . . . . . . . . . . . . . . . . . . 91
3.2 Vector fields as derivations . . . . . . . . . . . . . . . . . . . . . . . 104
3.3 The Lie bracket . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
3.4 Vector fields along maps . . . . . . . . . . . . . . . . . . . . . . . . 110
3.5 Related vector fields . . . . . . . . . . . . . . . . . . . . . . . . . . 111
3.6 Integral curves of vector fields . . . . . . . . . . . . . . . . . . . . . 115
3.7 The flow of a vector field . . . . . . . . . . . . . . . . . . . . . . . . 125
3.8 The Lie derivative of vector fields . . . . . . . . . . . . . . . . . . . 134
4. Lie groups 145
4.1 Lie groups and Lie group morphisms . . . . . . . . . . . . . . . . . 145
4.2 The Lie algebra of a Lie group . . . . . . . . . . . . . . . . . . . . 154
4.3 One-parameter subgroups . . . . . . . . . . . . . . . . . . . . . . . 162
4.4 The exponential map of a Lie group . . . . . . . . . . . . . . . . . 168
xiii

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page xiv
xiv Contents
4.5 The adjoint representation . . . . . . . . . . . . . . . . . . . . . . . 176
4.6 Smooth actions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
5. Submanifolds and maps of constant rank 189
5.1 Regular submanifolds . . . . . . . . . . . . . . . . . . . . . . . . . . 189
5.2 Immersions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
5.3 Submersions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
5.4 Lie subgroups of GL(n,R) and their algebras . . . . . . . . . . . . 222
6. Riemannian Structures and Connections 227
6.1 Riemannian Structures . . . . . . . . . . . . . . . . . . . . . . . . . 228
6.2 Riemannian manifolds as metric spaces . . . . . . . . . . . . . . . . 234
6.3 Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
6.4 Riemannian connections . . . . . . . . . . . . . . . . . . . . . . . . 253
7. Differential forms 259
7.1 Linear forms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
7.2 Differential forms on Rn . . . . . . . . . . . . . . . . . . . . . . . . 271
7.3 The de Rham complex in Rn . . . . . . . . . . . . . . . . . . . . . 283
7.4 Differential forms on manifolds . . . . . . . . . . . . . . . . . . . . 292
7.5 The pullback of differential forms . . . . . . . . . . . . . . . . . . . 313
7.6 Lie derivative and interior multiplication of differential forms . . . 321
Appendix A Topology 337
A.1 Topologies, bases and continuous maps . . . . . . . . . . . . . . . . 337
A.2 Metric spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340
A.3 Continuity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
A.4 Subspace topology . . . . . . . . . . . . . . . . . . . . . . . . . . . 343
A.5 Product topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
A.6 Countability axioms . . . . . . . . . . . . . . . . . . . . . . . . . . 349
A.7 Hausdorff spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . 350
A.8 Quotient spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
A.9 Compact spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355
A.10 Connected spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358
A.11 Local topological properties . . . . . . . . . . . . . . . . . . . . . . 362
Appendix B Differential Calculus 363
B.1 Differentiability in Euclidean spaces . . . . . . . . . . . . . . . . . 363
B.2 Differentiability and cartesian products . . . . . . . . . . . . . . . . 366
B.3 Partial derivatives . . . . . . . . . . . . . . . . . . . . . . . . . . . 367
B.4 Two fundamental theorems . . . . . . . . . . . . . . . . . . . . . . 370
B.5 The chain rule in terms of partial derivatives . . . . . . . . . . . . 372

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page xv
Contents xv
Bibliography 373
List of symbols 377
Index 385
Answers to Exercises 387

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 1
Chapter 1
Differential Structures
It is hardly an exaggeration to say
that manifolds are the most impor-
tant spaces in mathematics.[...] They
are important almost everywhere in
mathematics from calculus on.
W.M. Boothby [8, p. 145]
Motivated by the central idea of cartography, we define the structure of a differ-
ential or smooth manifold, based on the abstraction of (geographical) charts and
atlases. The existence of a differential structure on a setM supplies the latter with a
canonical topology whose basic properties are exhibited. The next step is to define
a differentiability notion for maps between smooth manifolds. This is a half way
towards the development of a differential calculus on an abstract space such as a
smooth manifold. This development is completed in Chapter 2, when the necessary
linear spaces, supporting a notion of derivative, are provided by the tangent spaces
of the manifold. The final section of this chapter is dealing with bump functions
and smooth partitions of unity on a manifold M . The former allow to extend local
differentiable functions to ones with domain M . On the other hand, local objects,
defined on an open cover of the manifold, can be glued together by means of a
partition of unity to determine a global object on M .
1.1 Motivation
Many terms encountered in the first sections come from cartography, the art of
making charts. The problem of drawing charts is very old. Ancient astronomers, like
Hipparhus (190–125 B.C) and Ptolemy (138–180 A.D), used the method of stere-
ographic projection (as it was named around the 1600’s) to draw celestial charts.
Much later, in medieval times, the same method was used to make primitive geo-
graphical charts of the then known world.
1

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 2
2 Differential Structures
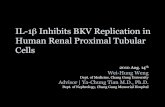
In making charts, one essentially tries to project, that is, to represent parts of the
Earth into pieces of the plane. Let us describe first the stereographic projection
from the north pole shown in the next figure.
N
S
x
y
z
P
NP
E
0
Figure 1.1 Stereographic projection from the north pole
Idealizing the situation, we imagine that the Globe is represented by the unit sphere
S2 centered at the origin 0 of the cartesian system of coordinates in R3. We also
imagine that a (very large) sheet of paper is unfolded on the plane x0y, identified
with the plane E of the equator. Then the straight line from the north pole N to
a point P on the sphere meets E at a point PN . The latter is the stereographic
projection of P from the north pole. Conversely, joining any point of E with N , we
obtain a point on S2.
A little thought may convince the reader that, in this way, all the points of the
sphere but one, namely the north pole, are in 1–1 correspondence to the points of
the whole plane E; in other words, S2 \ N = S2 − N is projected bijectively
onto E ≡ R2. This process yields a very primitive chart, a useless one indeed, since
points close to N are projected very far away, thus the image of regions near to the
noth pole are monstrously distorted. Nevertheless, the essence of chart making lies
in this process.
Since the image of the north pole does not appear in our chart, we make a new
one containing the image of N by applying, in a similar way, the stereographic
projection from the south pole S. Then S2 \ S is bijectively projected onto E.
Clearly, the new chart does not contain the image of S. However, binding together
the previous two charts we get a (geographical) atlas.
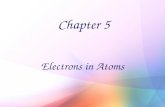
For the same sphere we may obtain better charts (only of theoretical value, of
course) by projecting various hemispheres to appropriate planes. More precisely, we
consider the north hemisphere (without the equator)
(1.1.1) S+z :=
(x, y, z) ∈ S2 : z > 0
,
and we project it onto the plane E of the equator, as in Figure 1.2. Clearly, a point
(x, y, z) of the hemisphere is mapped to the point (x, y) belonging to the unit disc

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 3
1.1. Motivation 3
( , )u v
2 21( , , )u vu v - -
(0,1)D
S z
+
Figure 1.2 The north hemisphere
(1.1.2) Dz :=
(a, b) ∈ R2 : a2 + b2 < 1
(the index z indicates that this disc is perpendicular to the z-axis). Conversely,
any (a, b) ∈ Dz is the projection of (a, b,+√1− a2 − b2) ∈ S+
z . Thus, a bijective
correspondence between the noth hemisphere and the disc Dz is established, pro-
viding a chart. Note that Dz is an open subset of R2, a fact which will be important
importance in the definition of smooth manifolds.
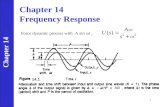
Analogously, we consider the south hemisphere S−z (along the z-axis ), the west
and east hemispheres (along the x-axis), and the two hemispheres along the y-axis.
In this way we get an atlas with six charts. All the aforementioned hemispheres are
shown in the standard picture of Figure 1.3
The details of the preceding charts, obtained by the stereographic projections
and the hemispheres, will be elaborated in Examples 1.2.12 (D1,D2), pp. 14, 15.
Of course, in modern cartographymore complicated projections are used (see, for
instance, [52, Chapter 8bis]), and very sophisticated devices, mounted on satellites,
produce highly accurate charts. Further details on this matter are beyond the scope
of this book.
The idea to correspond parts of the sphere to open subsets of R2 had been applied
to arbitrary surfaces in 3-dimensional space. Thus the mathematical tools of the
Euclidean space can be transferred, so to speak, to a surface. The development of
the modern differential geometry of surfaces bears the seal of C.F. Gauss’s ingenuity.
In the study of these objects, the fact that the latter are embedded in R3 plays a
crucial role. However, the theorem of Gauss known as Theorema Egregium revealed
the existence of an intrinsic geometry. This means that the geometry of the surface
can be recovered by means of measurements on the surface itself, without recourse
to any ambient space. This led G.F.B. Riemann to conceive the idea of an abstract
space, not necessarily embedded in some Euclidean space, that he called manifold.
Riemann’s revolutionary ideas first appeared in his famous Inaugural Lecture
Uber die Hypothesen, welche der Geometrie zu Grunde liegen (: On the hypotheses

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 4
4 Differential Structures
S+
z
S-
z
S+
x
S-
x
S+
y
S-
y
z
x y
Figure 1.3 Six typical hemispheres
which lie at the foundations of geometry)∗, delivered at the University of Gottingen
in 1854, as part of the requirements for the position of ‘Privatdozent’. For a long
time they remained at the possession of a few mathematicians until A. Einstein
applied Riemann’s geometrical ideas to describe the mathematical background of
the theory of General Relativity. This had a tremendous impact on the development
of the theory of manifolds and led to an explosion of modern ideas, methods and
related disciplines.
1.2 Charts and atlases: formal definitions
Formalizing the process of chart making described in § 1.1, here we provide anarbitrary set with charts and atlases.
Definition 1.2.1. Let M be a nonempty set. An (m-dimensional) chart on M
is a pair (U, φ), where U ⊆M and
φ : U −→ φ(U) ⊆ Rm
is an 1–1 map (onto φ(U)), with φ(U) open in Rm (see also Figure 1.4).
∗For a translation of this lecture and many useful comments see [68, Vol. II]

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 5
1.2. Charts and atlases: formal definitions 5
Figure 1.4 A (coordinate) chart
The following terminology is of frequent use: If U is a proper subset of M , the
pair (U, φ) is called a local chart, whereas U =M characterizes a global chart. A
chart at (or about) x ∈M is a chart (U, φ) onM such that x ∈ U . The Euclideanspace Rm is said to be the model of the chart.
Global charts are generally rare. We describe a few of them in Examples 1.2.12.
If there is a global chart (M,φ), then M is identified with the open subset φ(M)
of Rm; therefore, M may be considered as a topological space on which one defines
differentiable mappings in the usual sense.
A local chart (U, φ) is also called a coordinate chart because it induces the
local coordinate functions or simply local coordinates
xi := pri φ ; i = 1, . . . ,m,
where pri : Rm → R is the projection to the i-th factor. The same projections
coincide with the ordinary coordinate functions (ui) of Rm. Thus, with respect
to (U, φ), the coordinates of a point x ∈ U are the numbers
xi(x) = pri(φ(x)) = ui(φ(x)), i = 1, . . . ,m.
To specify the coordinate functions, we also write (U, φ) = (U, x1, . . . , xm). In this
respect, U is the coordinate domain and φ the coordinate function Occa-
sionally, instead of xi(x), we simply write xi, omitting x. The context will clarify
whether we are referring to the coordinate functions on U or the coordinates of the
point x ∈ U .As in the case of geographical atlases, there are points of M belonging to more
than one charts, thus they admit various systems of local coordinates. Simple alge-
braic computations transform one system to another. However, since our ultimate
goal is to provide M with a differential structure so that, among other things, a
differential calculus can be built on M , we require the change of coordinates to be
differentiable in the following precise sense.
Definition 1.2.2. Two charts (U, φ) and (V, ψ) ofM are said to be Ck-compatible
(k = 0, 1, . . . ,∞) either
(i) U ∩ V = ∅, or

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 6
6 Differential Structures
(ii) U ∩ V 6= ∅, in which case it is also assumed that φ(U ∩ V ) and ψ(U ∩V ) are open subsets of Rm, and the transition functions or change of
coordinates
(1.2.1)ψ φ−1 : φ(U ∩ V ) −→ ψ(U ∩ V ),φ ψ−1 : ψ(U ∩ V ) −→ φ(U ∩ V ),
are Ck-differentiable.
Figure 1.5 A transition function
It is worth noticing that regular surfaces in R3 have differentiable transition
functions as a result of a proven theorem, where the fact that the surface is embedded
in R3 plays a crucial role. It took a long time to mathematicians to understand the
importance of the differentiability of the transition functions, and to realize that, in
the case of absence of an ambient space, this condition should be axiomatized (see
also the relevant comments in [13, pp. 2–3]).
Since the maps (1.2.1) are inverse to each other, the preceding differentiability
condition implies that both mappings are Ck-diffeomorphisms. We recall that a
diffeomorphism is a differentiable bijection with a differentiable inverse.
For k = 0, ψ φ−1 and φ ψ−1 are only continuous (hence homeomorphisms).
In this case, the charts (U, φ) and (V, ψ) are called topologically compatible. If
k =∞, the charts are called smoothly compatible. Clearly, smooth compatibility
implies Ck–compatibility, for every k ∈ N. In turn, the latter implies the topological
compatibility of charts.
If we want to be very formal, the maps (1.2.1) should be written as
ψ φ−1|φ(U∩V ) and φ ψ−1|ψ(U∩V )

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 7
1.2. Charts and atlases: formal definitions 7
respectively. However, for the sake of simplicity, we will not write down the re-
strictions whenever there is no danger of confusion, especially when the domain of
definition is explicitly mentioned.
Remark 1.2.3. The Ck-compatibility of two intersecting charts implies that theynecessarily have the same dimension. Indeed, let (U, φ) and (V, ψ) be Ck-compatiblecharts of dimensions m and n, respectively, with U ∩V 6= ∅. If k ≥ 1, then, for every
x ∈ U ∩ V , the ordinary derivative of ψ φ−1,
D(ψ φ−1)(φ(x)) : Rm −→ Rn,
is a linear isomorphism, hence m = n.
However, for k = 0, the open sets φ(U ∩ V ) and ψ(U ∩ V ) in Rm and R
n,
respectively, are homeomorphic and the equality of the dimensions follows from
Brouwer’s theorem on Invariance of Domain. A (quite sophisticated) proof of the
latter and other relevant details can be found, for instance, in [23], [36], [60] and [67].
We also note that non-intersecting charts (of the same space M) are not neces-
sarily of the same dimension [see Exercise 1.2.14 (19)].
As a geographical atlas is a collection of charts, in our context we have the
following formal notion:
Definition 1.2.4. A Ck-atlas of M is a family
A = (Ui, φi) | i ∈ I
of charts on M , such that:
(i) Uii∈I is a covering of M ; that is,⋃
i∈I Ui =M ;
(ii) For every i, j ∈ I, the charts (Ui, φi) and (Uj , φj) are Ck-compatible.If k = 0 (resp. k = ∞), A will be called a topological (resp. differential or
smooth) atlas.
If all the charts of A have the same dimension m, A is called an m-dimensional
atlas.
Returning to the atlases of S2 described in Section 1.1, it is not hard to see
that both satisfy the conditions of Definition 1.2.4 [details will be given in Exam-
ples 1.2.12 (D1,D2), pp. 14, 15]. Intuitively, we also see that restricting the stereo-
graphic projections to the upper or lower hemispheres, we obtain new charts which
are smoothly compatible with the two charts of the original atlas, but they do not
belong to it. Similarly, projecting half of the six hemispheres to the corresponding
discs, we obtain new compatible charts not belonging to the initial atlas of the
hemispheres.
Since we want to be able to control all the compatible charts, we consider them
as members of a larger structure defined below. This is particularly useful in dealing
with questions of differentiability, where we often need to shrink the domain of a
chart. For this purpose we denote by Akm(M) the set of all m-dimensional Ck-atlases

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 8
8 Differential Structures
on a set M 6= ∅. If A,B ∈ Akm(M), we say that A is smaller or coarser than B
(notation: A ≤ B) if A is (set-theoretically) contained in B; that is,(1.2.2) A B ⇐⇒ A ⊆ B.It is clear that relation (1.2.2) induces a partial order in Akm(M).
Definition 1.2.5. An atlas A ∈ Akm(M) is called maximal if it is a maximal
element of Akm(M), with respect to the previous partial order; that is,
∀ B ∈ Akm(M) with A B =⇒ A = B.
In other words, A is not contained in a larger atlas.
Proposition 1.2.6. An atlas A ∈ Akm(M) is maximal if and only if it contains all
the charts of M which are Ck-compatible with every chart of A.
Proof. Assume that A ∈ Akm(M) is a maximal atlas and let (U, φ) be any (m-
dimensional) chart on M , Ck-compatible with every chart of A. ThenA ⊆ A ∪ (U, φ) ∈ A
km(M).
Hence, the maximality condition implies that A = A ∪ (U, φ), thus (U, φ) ∈ A.Conversely, assume that an atlas A ∈ Akm(M) contains every chart Ck-
compatible with all the charts of A. If B ∈ Akm(M) is any atlas with A B,then every chart of B is Ck-compatible with all the charts of A. Consequently, bythe assumption, every chart of B belongs to A, thus B A and B = A, which showsthat A is maximal.
The next basic theorem describes the construction of a maximal atlas from a
given one.
Theorem 1.2.7. An m-dimensional atlas A ∈ Akm(M) is contained in a unique
m-dimensional maximal atlas A′k ∈ Akm(M).
Proof. Let an arbitrary atlas A ∈ Akm(M). We denote by A′k the set of all m-
dimensional charts of M , which are Ck-compatible with all the charts of A. ClearlyA ⊆ A′k. We have to verify the following assertions:
A′k is a Ck-atlas: Condition (i) of Definition 1.2.4 is immediate. For condition (ii),we consider two arbitrary charts (U, φ) and (V, ψ) of A′k with U ∩ V 6= ∅. First weprove that φ(U ∩V ) is an open subset of Rm. To this end it suffices to show that, for
every a ∈ φ(U∩V ), there exists an open subsetB of Rm such that a ∈ B ⊂ φ(U∩V ).Set x := φ−1(a) ∈ U ∩ V . Since the charts of A cover M , there exists (W,χ) ∈ A,with x ∈W ; hence, x ∈ A := U ∩ V ∩W (see also the next picture).

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 9
1.2. Charts and atlases: formal definitions 9
Figure 1.6 Chart compatibility of a maximal atlas
Therefore, we can write:
φ(A) = φ(U ∩ V ∩W )
= (φ χ−1)(
χ(U ∩ V ∩W ))
= (φ χ−1)(
χ(U ∩W ) ∩ χ(V ∩W ))
.
The charts (U, φ) and (W,χ) are Ck-compatible (by the construction of A′), thusχ(U ∩W ) is an open subset of Rm. Similarly, χ(V ∩W ) is an open subset of Rm
by of the compatibility of (V, ψ) and (W,χ). Consequently, χ(U ∩W ) ∩ χ(V ∩W )
is an open subset of χ(U ∩W ). Applying the homeomorphism φ χ−1, we see that
φ(A) =(
φ χ−1)(
χ(U ∩W ) ∩ χ(V ∩W ))
⊂open
(
φ χ−1)(
χ(U ∩W)
= φ(U ∩W ) ⊂open
Rm;
that is, φ(A) is an open subset of φ(U ∩ W ), thus an open subset of Rm. Since
a ∈ φ(A) ⊆ φ(U ∩ V ), setting B := φ(A), we infer that φ(U ∩ V ) is an open subsetof Rm. A similar reasoning proves that ψ(U ∩ V ) is open in R
m.
Next we need to show the Ck-differentiability of the transition functions (1.2.1).For the first of them we proceed as follows (analogously for the second): Since the
differentiability of a function is a local property, it suffices to show that, for every
a ∈ φ(U ∩ V ), there is an open subset B of φ(U ∩ V ), such that a ∈ B and the
restriction of ψ φ−1 to B, i.e. ψ φ−1|B, is a Ck-map. As before, we consider thechart (W,χ) ∈ A with x := φ−1(a) ∈ W , and the set A := U ∩ V ∩W . We have
already proved that φ(A) and χ(A) = χ(U ∩W ) ∩ χ(V ∩W ) are open subsets of
Rm. On the other hand, the Ck-compatibility of (U, φ) with (W,χ), and (V, ψ) with

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 10
10 Differential Structures
(W,χ), implies the Ck-differentiability of the mapsχ φ−1 : φ(U ∩W ) −→ χ(U ∩W ),
ψ χ−1 : χ(V ∩W ) −→ ψ(V ∩W ).
As a result, their restrictions
χ φ−1|φ(A) : φ(A) −→ χ(A),
ψ χ−1|χ(A) : χ(A) −→ ψ(A)
are Ck-differentiable, as well as their compositeψ φ−1|φ(A) =
(
ψ χ−1|χ(A)
)
(
χ φ−1|φ(A)
)
.
Setting again B = φ(A), we obtain the desired differentiability, thus proving the
first assertion of the statement.
A′k is maximal: Indeed, if (U, φ) is an arbitrary chart ofM , Ck-compatible with thecharts of A′k, then (U, φ) is Ck-compatible with the charts of A (since A ⊆ A′k);hence, by Proposition 1.2.6, we prove the claim.
A′k is the unique maximal atlas containing A: Assume that A′′k ∈ Akm(M) is an-
other maximal atlas with A ⊆ A′′k . This means that the charts of A′′k are Ck-compatible with all the charts of A, hence A′′k ⊆ A′k. However, A′′k is maximal, thusA′′k = A′k, which completes the proof.
Another way to define a maximal atlas is by inducing an equivalence relation be-
tween atlases. More precisely, two atlases A, B ∈ Akm(M) are called Ck-compatible
(in symbols: A k∼ B) if A ∪ B is also an m-dimensional Ck-atlas; that is,
(1.2.3) A k∼ B ⇐⇒ A∪ B ∈ Akm(M).
We show that this is an equivalence relation in the next proposition.
The union of two Ck-atlases obviously covers M . On the other hand, if
(U, φ), (V, ψ) ∈ A ∪ B, then either both charts belong to the same atlas, or one
belongs to A and the other to B. To ensure the compatibility of the atlases, we
should check the compatibility of the preceding charts only in the second case (in
the first case this is automatically satisfied). In other words,
(1.2.4)A k∼ B if and only if every chart of A is Ck-compatible with
every chart of B.On the other hand, the comparison of the two relations in Akm(M) leads to
(1.2.5) A B =⇒ A∪B = B ∈ Akm(M),
i.e. the order relation (1.2.2) implies the equivalence relation (1.2.3).
Proposition 1.2.8. The following assertions hold true:
(i) If A,B ∈ Akm(M), then A k∼ B ⇐⇒ A′k = B′k.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 11
1.2. Charts and atlases: formal definitions 11
(ii)k∼ is an equivalence relation.
(iii) If [A] is the equivalence class of A ∈ Akm(M), with respect tok∼, then
A∗ :=
⋃
B∈[A]
B
∈ Akm(M).
(iv) For every A ∈ Akm(M), it follows that A∗ = A′k.
Proof. (i) If A k∼ B, then A ∪ B ∈ Akm(M). Therefore, in virtue of Theorem 1.1.7,
we obtain the maximal atlas (A ∪ B)′k. BecauseA,B ⊆ A ∪ B ⊆ (A ∪ B)′k,
Definition 1.2.5 and the uniqueness of the maximal atlases corresponding to A and
B imply that
A′k = (A ∪ B)′k = B′k.Conversely, if A′k = B′k, then the charts of A and those of B belong to the same
atlas A′k = B′k; hence, they are mutually Ck-compatible. Consequently Ak∼ B.
(ii) The reflexivity and symmetry ofk∼ are obvious. Now, assume that A k∼ B
and B k∼ C. Then, by i) above, A′k = B′k and B′k = C′k, whence the transitivityproperty.
(iii) Obviously, the charts of A∗ cover M . It remains to check the compatibility
of any charts (U, φ) ∈ B and (V, ψ) ∈ C, where B and C are arbitrary atlases in [A].This is an immediate consequence of B k∼ C and assertion (1.2.4).
(iv) Since A ∪A′k = A′k ∈ Akm(M), it follows that A′k
k∼ A, thus A′k ⊆ A∗. Themaximality of A′k implies that A∗ = A′k.
Definition 1.2.9. We say that a maximal atlas A ∈ Akm(M) defines a Ck-differential structure or the structure of a Ck-manifold on M , and the pair
(M,A) is a Ck-manifold. In particular, if k = 0, (M,A) is called a topological
manifold; whereas, for k =∞, A determines a smooth structure and (M,A) isa smooth manifold. If all the charts of A have the same dimension m, we say that
Rm is the model of the manifold and m its dimension. We write dim(M) = m.
We note that instead of differential structure and manifold the terms differ-
entiable structure and manifold are also used. Although grammatically differential
and differentiable have different connotations, in our framework they qualify the
same objects.
Remarks 1.2.10. 1) The importance of Theorem 1.2.7 it should be now obvious:
In order to endow a set M with the structure of a smooth manifold, it is sufficient
to find a (not necessarily maximal) atlas of M . Then the respective maximal atlas
defines the desired structure.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 12
12 Differential Structures
2) A maximal atlas can be the maximal atlas of many atlases, in contrast to the
uniqueness (by Theorem 1.2.7) of the maximal atlas corresponding to a given atlas
[see Exercises 1.2.14 (7), 1.2.14 (8) and 1.2.14 (9)].
3) It is worth mentioning the following result of Differential topology (see [32,
pp. 51-52]):
A Ck-structure, k ≥ 1, contains a Cr-structure, for every k < r ≤ ∞.
This is not true for a C0-structure. As a matter of fact, M. Kervaire [39] gave anexample of a topological manifold not admitting any differential structure.
On the other hand, J. Milnor [55] discovered the existence of exotic 7-spheres:
These are manifolds that are homemorphic but not diffeomorphic to the standard
manifold structure of S7 (the precise meaning of the previous terminology will be
clarified in Definition 1.4.9). For a heuristic description of them we refer to [17, p. 6].
It is also known (see [40]) that the sphere S7 admits 28 exotic structures, while S31
has more than 16 million!
Also, in the 1980’s (see [21], [24]), it was proved that there are manifolds home-
omorphic but not diffeomorphic to the standard structure of R4 (exotic R4). In
contrast, for any n 6= 4, any smooth manifold homeomorphic to Rn is diffeomorphic
to the latter.
Conventions 1.2.11. 1) In view of the result mentioned in in the Re-
mark 1.2.10 (3), hereafter all the manifolds considered will be smooth, unless
otherwise stated. If A is any smooth atlas, then the corresponding maximal at-
las will be simply denoted by A′ (instead of A′∞, as suggested by the notation
of Theorem 1.2.7).
2) If A is the maximal atlas inducing the manifold structure on M , we
usually say (and write) “the (smooth) manifold M ≡ (M,A)”. If there is noambiguity about the atlas A in the previous pair, we simply say “ the (smooth)
manifold M”, the adjective smooth frequently omitted.
3) Also, for the sake of simplicity, we will assume that all the charts have the
same dimension, as is the case of most examples, thus dim(M) is well defined.
In Proposition 1.3.18 we will give a sufficient condition ensuring the existence
of dim(M). But this needs the topological background of Section 1.3.
Let us stop for a while and give some standard examples.
Examples 1.2.12.
(A) Rn and its open subsets
Let an open A ⊆ Rn and consider the pair (A, idA). It is obvious that (A, idA)
is an n-dimensional global chart of A and A := (A, idA) is an n-dimensional
smooth atlas of A. If A′ is the respective maximal atlas, then A ≡ (A,A′) is ann-dimensional smooth manifold.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 13
1.2. Charts and atlases: formal definitions 13
The previous considerations hold true, a fortiori, for A = Rn. Hence,
(
Rn, (Rn, idA)′
)
is an n-dimensional smooth manifold. This is called the standard or ordinary
smooth structure of Rn. In Exercise 1.2.14 (9) we define on R a smooth structure
that differs from the standard one.
(B) Finite dimensional vector spaces
Let V be an n-dimensional real vector space. A basis (v1, . . . , vn) of V induces a
linear isomorphism
ψ : V −→ Rn : x =
n∑
i=1
xivi 7→ (x1, . . . , xn).
The pair (V, ψ) is clearly an n-dimensional global chart of V . Hence the set A :=
(V, ψ) is an n-dimensional smooth atlas of V and, if A′ is the respective maximalatlas, then (V,A′) is an n-dimensional smooth manifold.
In particular, the spaceMm×n(R) of m×n real matrices is an m ·n-dimensionalsmooth manifold. The map Φ: Mm×n(R) → R
m·n inducing this structure is pre-
cisely the one associating to a matrix the vector obtained by arranging side by side
the lines of the matrix:
a11 . . . a1n. . . . . . . . . . .
am1 . . . amn
7−→ (a11, . . . , a1n, . . . , am1, . . . , amn).
For later use, we setMn(R) :=Mn×n(R), thusMn(R) ∼= Rn2
.
In the same vein, the space of linear maps L(E,F) between two vector spaces,of respective dimensions m and n, is also a smooth m · n-dimensional manifold: Bychoosing arbitrary bases of E and F,
L(E,F) ∼=Mm×n(R) ∼= Rm·n.
(C) An extreme case: 0-dimensional manifolds
Let M be a non empty set. For each point x ∈M consider the map φx : x → 0.Since R
0 is nothing but the singleton 0, obviously (x, φx) is a chart on M . All
the charts of this form are smoothly compatible in a trivial way, thus their collection
determines a 0-dimensional atlas A. The later is necessarily maximal (why?), thus(M,A) is a 0-dimensional smooth manifold. A set M endowed with the preceding
structure is also called a discrete manifold.
(D) The surface of the unit sphere S2
The unit sphere centered (for simplicity) at 0 ≡ (0, 0, 0),
S2 :=
(x, y, z) ∈ R3 |x2 + y2 + z2 = 1
,
will be endowed with the structure of a 2-dimensional smooth manifold in the
two ways outlined in Section 1.1. It turns out that these structures coincide (see
Exercise 1.2.14 (2) and Theorem 1.4.16).

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 14
14 Differential Structures
(D1) S2 as a manifold by stereographic projections
Fixing the poles N = (0, 0, 1) and S = (0, 0,−1), we define the pairs (UN , φN ) and(US , φS), where
UN = S2 \ N, US = S2 \ S,
φN : UN −→ R2 : (x, y, z) 7→ φN (x, y, z) =
(
x
1− z,
y
1− z
)
,
φS : US −→ R2 : (x, y, z) 7→ φS(x, y, z) =
(
x
1 + z,
y
1 + z
)
.
The previous maps are the precise expressions of the stereographic projections from
the north ant south pole, respectively [see also Exercise 1.2.14 (4)]. We check that
φN is injective: If (x1, y1, z1), (x2, y2, z2) ∈ UN with
φN (x1, y1, z1) = φN (x2, y2, z2);
that is,(
x11− z1
,y1
1− z1
)
=
(
x21− z2
,y1
1− z1
)
,
then adding the squares of the equal coordinates and taking into account that
x21 + y21 + z21 = x22 + y22 + z22 , we have that z1 = z2, whence it follows that x1 = x2and y1 = y2. The injectivity of φS is proved analogously.
We also check that the range of φN is the whole of R2. Indeed, for any (a, b) ∈ R2,
we look for an (x, y, z) ∈ S2 such that
φN (x, y, z) =
(
x
1− z,
y
1− z
)
= (a, b).
Then, substituting x = a(1 − z) and y = b(1 − z) in x2 + y2 + z2 = 1, we obtain
z =−1 + a2 + b2
1 + a2 + b2, from which follows that x =
2a
1 + a2 + b2and y =
2b
1 + a2 + b2.
Therefore, the inverse of φN is given by
φ−1N (a, b) =
(
2a
1 + a2 + b2,
2b
1 + a2 + b2,−1 + a2 + b2
1 + a2 + b2
)
.
Hence φN (UN ) = R2 is an open set. In a similar way, we verify that, for every
(a, b) ∈ R2,
φ−1S (a, b) =
(
2a
1 + a2 + b2,
2b
1 + a2 + b2,1− a2 − b21 + a2 + b2
)
,
and φS(US) = R2. The preceding arguments prove that (UN , φN ), (US , φS) are
charts of S2.
We will show that
A := (UN , φN ), (US , φS)

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 15
1.2. Charts and atlases: formal definitions 15
is a smooth atlas. It is immediate that UN∪US = S2. On the other hand, UN∩US =UN \ S = US \ N; therefore,
φN (UN ∩ US) = φN (UN \ S) = φN (UN ) \ φN (S) = R2 \ (0, 0),
φS(UN ∩ US) = φS(US \ N) = φS(US) \ φS(N) = R2 \ (0, 0),
which means that the set φN (UN ∩ UN ) = φS(UN ∩ US) = R2 \ (0, 0) is open in
R2. Moreover, an easy computation shows that the maps
φS φ−1N , φN φ−1
S : R2 \ (0, 0) −→ R2 \ (0, 0)
are given by the formula
φS φ−1N (a, b) = φN φ−1
S (a, b) =
(
a
a2 + b2,
b
a2 + b2
)
,
for every (a, b) ∈ R2 \ (0, 0), thus they both are smooth.
In conclusion, (UN , φN ) and (US , φS) are smoothly compatible charts and Ais a smooth atlas. If A′ denotes the respective maximal atlas, then (S2,A′) is a2-dimensional smooth manifold.
(D2) S2 as a manifold by hemispheres
Recalling (1.1.1), we define the sets
S+z :=
(x, y, z) ∈ S2 : z > 0
,
S−z :=
(x, y, z) ∈ S2 : z < 0
,
Dz :=
(x, y) ∈ R2 : x2 + y2 < 1
.
In other words, S+z (resp. S−z ) is the positive (resp. the negative) hemisphere over
(resp. under) the xy-plane without the equator. Dz is the open disc with center
0 ≡ (0, 0) and radius 1 on the same plane. We also define the maps
phi+z : S+z −→ Dz : (x, y, z) 7→ (x, y),
φ−z : S−
z −→ Dz : (x, y, z) 7→ (x, y),
which are the projections of the preceding hemispheres to the disc separating them.
Then the pairs (S+z , φ
+z ), (S
−
z , φ−
z ) are charts of the sphere. Indeed, we check at
once that φ+z , φ−
z are 1–1 onto Dz with respective inverses
(
φ+z)
−1(a, b) =
(
a, b,√
1− a2 − b2)
,(
φ−z)
−1(a, b) =
(
a, b,−√
1− a2 − b2)
,
for every (a, b) ∈ Dz. Hence φ+z (U
+z ) = φ−z (U
−
z ) = Dz ⊂ R2 open.
In this way, we obtain the six charts (Sαi , φαi ), with i = x, y, z and α = +,−,
and the three discs Di, i = x, y, z. Then the family
B := (Sαi φαi ) | i = x, y, z; α = +,−

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 16
16 Differential Structures
is an atlas of S2: Obviously the domains of the charts cover S2, since for every
(x, y, z) ∈ S2, we have x2 + y2 + z2 = 1; hence, at least one coordinate, say x, does
not vanish, thus
(x, y, z) ∈ U+x or (x, y, z) ∈ U−x .
We prove the compatibility, e.g., of (S+x φ
+x ) and (S
−
y φ−
y ). In this case,
S+x ∩ S−y =
(x, y, z) ∈ S2 : x > 0, y < 0
;
hence,
φ+x : S+x ∩ S−y ∋ (x, y, z) 7−→ φ+x (x, y, z) = (y, z) ∈ Dx,
with y < 0, i.e.
φ+x(
S+x ∩ S−y
)
= Dx ∩ (y, z) ∈ R2 : y < 0.
Consequently, φ+x(
S+x ∩S−y
)
is the lower half of the disc Dx, which is an open subset
of R2. Similarly,
φ−y(
S+x ∩ S−y
)
= Dy ∩ (x, z) ∈ R2 : x > 0 ⊂ R
2
is open in R2.
For the differentiability of the corresponding transition functions, we notice that,
for every (a, b) ∈ φ+x(
S+x ∩ S−y
)
, we have(
φ−y (φ+x )−1)
(a, b) = φ−y(
√
1− a2 − b2, a, b)
=(
√
1− a2 − b2, b)
;
hence, φ−y (φ+x )−1 is a C∞-map on φ+x(
S+x ∩ S−y
)
. Analogously, for every (a, b) ∈φ−y (U
+x ∩ U−y ),(
φ+x (φ−y )−1)
(a, b) = φ+x(
a, −√
1− a2 − b2, b)
=(
−√
1− a2 − b2, b)
,
showing that φ+x (φ−y )−1 is also smooth on its domain.
In a similar way we prove the compatibility of any other pair of charts. Conse-
quently B is an atlas of S2 and (S2,B′) a 2-dimensional smooth manifold.
(E) The unit circle S1
The unit circle S1 := (x, y) ∈ R2 : x2 + y2 = 1 becomes a smooth manifold of
dimension 1 by adaptingthe analogs of stereographic projections or suitable semi-
circles [see Exercise 1.2.14 (8)]. Here we describe a third atlas, which proves to be
very useful in various applications. More precisely, we consider the set
C :=
(UN , θN ), (US , θS)
,
where
UN := S1 \ (0, 1), US := S1 \ (0,−1),the maps θi : Ui → R (i = N,S) sending every point P = (x, y) of Ui to the angle
θi between OP and Ox (if O denotes the origin of the axes, center of the circle),
subject to the restrictions
θN (P ) ∈ (π/2, 5π/2) ; P ∈ UN ,θS(P ) ∈ (−π/2, 3π/2) , P ∈ US .

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 17
1.2. Charts and atlases: formal definitions 17
By elementary trigonometry we see that θN and θS are 1–1 maps onto the respective
intervals, which are open subsets of R; hence, the pairs (UN , θN ) and (US , θS) are
charts of S1. For their compatibility we first see that
θN (UN ∩ US) = (π/2, 3π/2)∪ (3π/2, 5π/2) ,θS(UN ∩ US) = (−π/2, π/2) ∪ (π/2, 3π/2) ,
which are open subsets of R. On the other hand, the transition function
θN θ−1S : θN (UN ∩ US) −→ θS(UN ∩ US)
is given by
θN θ−1S (t) =
t, t ∈ (π/2, 3π/2),t+ 2π, t ∈ (−π/2, π/2),
which is a C∞-diffeomorphism. As a result, C is a differential atlas of S1 and the
pair (S1, C′) is an 1-dimensional smooth manifold.
(F) The projective plane P2(R)
Let the Euclidean space R3. In R3∗:= R
3 \ (0, 0, 0) we define the relation
(1.2.6)(x1, x2, x3) ∼ (y1, y2, y3)⇐⇒
∃ λ ∈ R∗ := R− 0 : yi = λxi, i = 1, 2, 3.
It is easily verified that this is an equivalence relation. We denote by [x1, x2, x3]
(instead of the more complicated [(x1, x2, x3)]) the equivalence class of (x1, x2, x3).
The set of all the above classes, i.e. the quotient space
P2(R) :=(
R3 \ (0, 0, 0)
)/
∼is the projective plane (or the 2-dimensional projective space).
We define the sets
Ui :=
[x1, x2, x3] ∈ P2(R) : xi 6= 0
, i = 1, 2, 3,
and the maps
φ1 : U1 −→ R2 : [x1, x2, x3] 7→
(
x2
x1,x3
x1
)
,
φ2 : U2 −→ R2 : [x1, x2, x3] 7→
(
x1
x2,x3
x2
)
,
φ3 : U3 −→ R2 : [x1, x2, x3] 7→
(
x1
x3,x2
x3
)
.
Let us check that (U1, φ1) is a chart of P2(R): First we notice that φ1 is injective,
because
φ1([x1, x2, x3]) = φ1([y
1, y2, y3])
⇒ xi
x1=yi
y1, i = 2, 3,
⇒ xi = λyi, λ :=x1
y1
⇒ [x1, x2, x3] = [y1, y2, y3].

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 18
18 Differential Structures
Moreover, φ1(U1) = R2: Indeed, for every (a, b) ∈ R
2 we see that φ1([1, a, b]) = (a, b);
that is, φ1 is also surjective. Hence, φ1(U1) is an open subset of R2 and (U1, φ1) is
a chart. Similarly, (U2, φ2) and (U3, φ3) are charts of P2(R).
We show that the set A := (Ui, φi) | i = 1, 2, 3 is a smooth atlas of P2(R):
First notice that the domains of the previous charts cover P2(R), since, for ev-
ery [x1, x2, x3] ∈ P2(R), at least one coordinate, say x1, does not vanish; hence,
[x1, x2, x3] ∈ U1. For the compatibility, for instance, of (U1, φ1) and (U2, φ2), we see
that
U1 ∩ U2 =
[x1, x2, x3] ∈ P2(R) |x1 6= 0, x2 6= 0
,
thus, for any [x1, x2, x3] ∈ U1 ∩ U2,
φ1([x1, x2, x3]) =
(
x2
x1,x3
x1
)
∈ R∗ × R,
i.e. φ1(U1 ∩ U2) ⊆ R∗ × R. Conversely, if (a, b) ∈ R∗ × R, then [1, a, b] ∈ U1 ∩ U2
and φ1([1, a, b]) = (a, b); that is, R∗ × R ⊆ φ1(U1 ∩ U2), or φ1(U1 ∩ U2) = R∗ × R,
which is an open subset of R2. Finally, for every (a, b) ∈ R∗ × R,
(φ2 φ−11 )(a, b) = φ2([1, a, b]) =
(
1
a,b
a
)
= (φ1 φ−12 )(a, b),
which means that the transition functions
φ2 φ−11 = φ1 φ−1
2 : R∗ × R −→ R∗ × R
are C∞-maps. Analogously, we prove the compatibility of any other pair of charts.Therefore, A is an atlas and (P2(R), A′) is a differential manifold of dimension 2.
Geometrically speaking, the projective plane is isomorphic (by means of an ap-
propriate 1–1 and onto map) with the set of all straight lines of R3 passing through
the origin [see Exercise 1.2.14 (20)].
An easy generalization of P2(R) is the (real) n-dimensional projective space
Pn(R) . This is an n-dimensional smooth manifold [see Exercise 1.2.14 (21)].
(G) Regular surfaces in R3
A regular surface is a set S ⊂ R3 such that, for every p ∈ S, there exists a pair
(U, r), called (local) parametrization of S, where U is an open subset of R2,
r(U) is an open subset of S containing p, and the map r : U → r(U) satisfies the
following properties:
i) r is a homeomorphism (i.e. 1–1, onto, continuous with a continuous inverse).
ii) r is smooth.
iii) For every q ∈ U , the derivative (or differential) of r at q,Dr(q) : R2 −→ R
3
is 1–1 (equivalently, the Jacobian matrix of r at q has rank 2.
From the previous definition it is clear that the pair (r(U), r−1) is a 2-
dimensional chart, thus S is covered by a family of charts. Now, the compatibility

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 19
1.2. Charts and atlases: formal definitions 19
condition of the latter is proved to be a consequence of the properties of r, along with
the fact that S is imbedded in R3. Hence, all the charts of S form a 2-dimensional
smooth atlas whose corresponding maximal atlas determines the structure of a
2-dimensional manifold on S. Details on the classical theory of regular surfaces
and related topics can be found in many excellent sources. We refer, for instance
to [13], [44], [52] and [62].
A few comments may help the reader to clarify some basic differences between
regular surfaces and their abstraction, namely differential manifolds. First of all, the
continuity of r and its inverse has a meaning because a surface is a topological space
(endowed with the subspace topology derived from the ordinary topology of R3).
In contrast, there is no mention of a topological structure on a differential manifold
so far. This will be done in the next section, where we will show that the map φ of
every chart (U, φ) is indeed a homeomorphism (relative to the canonical topology
induced by the differential structure). The question of the differentiability of φ is
settled in Section 1.4, whereas the definition of an appropriate notion of differential
needs a lot of work and will be treated in Chapter 2. In any case, condition iii) of
the preceding definition is nonsensical in the context of manifolds.
The differential structure on the cartesian product of two manifolds is another
important example of manifold. We single it out because of its utility in numerous
occasions.
Proposition 1.2.13. Let M ≡ (M,A) and N ≡ (N,B) be two Ck-manifolds of
respective dimensions m and n. Then the cartesian product M×N has the structure
of an (m+ n)-dimensional Ck-manifold.
Proof. We consider the set
C := (U × V, φ× ψ) | (U, φ) ∈ A, (V, ψ) ∈ B .Every pair (U × V, φ× ψ) is a chart of M ×N , because
φ× ψ : U × V −→ φ(U)× ψ(V ) : (x, y) 7→ (φ(x), ψ(y))
is injective as the cartesian product of injective maps, and φ(U)× ψ(V ) is an opensubset of Rm × R
n as product of sets. Also, the charts of C cover M × N , for if
(x, y) ∈ M ×N , then there are (U, φ) ∈ A and (V, ψ) ∈ B with x ∈ U and y ∈ V ,hence (x, y) ∈ U × V .
For the Ck-compatibility of the charts of C, we take two arbitrary pairs(U1 × V1, φ1 × ψ1), (U2 × V2, φ2 × ψ2) ∈ C,
such that (U1 × V1) ∩ (U2 × V2) 6= ∅, thus U1 ∩ U2 and V1 ∩ V2 are not empty.
Therefore, the sets
(φ1 × ψ1)(
(U1 × V1) ∩ (U2 × V2))
= φ1(U1 ∩ U2)× ψ1(V1 ∩ V2),(1.2.7)
(φ2 × ψ2)(
(U1 × V1) ∩ (U2 × V2))
= φ2(U1 ∩ U2)× ψ2(V1 ∩ V2)(1.2.8)

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 20
20 Differential Structures
are open subsets of Rm×Rn (in the product topology), and the transition function
(φ2 × ψ2) (φ1 × ψ1)−1 = (φ2 φ−1
1 ) × (ψ2 ψ−11 ),
sending the set (1.2.7) onto (1.2.8) is a Ck-diffeomorphism, as the product of Ck-diffeomorphisms in Euclidean spaces.
We conclude that C is a Ck-atlas of M ×N and the respective maximal C′ atlasinduces the structure of a Ck-manifold on M ×N .
Clearly, Proposition 1.2.13 extends to any cartesian product with finitely many
factors (what is the corresponding dimension?). Also, referring to the previous proof,
it is interesting to note that C is not necessarily a maximal atlas, although it derivesfrom maximal atlases. Exercise 1.3.23 (10) in the next section provides an example
explaining this remark.
Exercises 1.2.14.
1. Prove any omitted details from the Examples 1.2.12.
2. Prove that every chart (U, φ) is smoothly compatible with itself.
3. Explain why the n-torus T n := S1×· · ·×S1 (n-times) is a differential manifold.
What is its dimension?
4. Prove the formulas expressing the stereographic projections of S2 and their
inverses, given in Example 1.2.12 (D1).
5. If U = (0, 1) × (0, π/2) ⊆ R2 and f : R2 → R
2 is the map given by f(r, θ) =
(r cos θ, r sin θ), prove that (U, φ) is a chart belonging to the standard smooth
structure of R2.
6. Prove that the map g : R2 → R2, with g(x, y) := (x2 + 2y2, 3xy) determines
on suitable open subsets of R2 (which ones?) charts on R2, belonging to the
standard smooth structure of R2.
7. Prove that the charts (UN , φN ), (US , φS) of S2 in Example 1.2.12 (D1) are com-
patible with the charts (Uαi , φαi ) in Example 1.2.12 (D2). What can be said about
the corresponding smooth structures of S2?
8. In analogy to the sphere S2, define on the circle S1 two 1-dimensional smooth
atlases: one consisting of appropriate stereographic projections and another with
semi-circles. Prove that these atlases are smoothly compatible with each other
and with the atlas C of Example 1.2.12 (E).9. Consider the charts (U1, φ1) and (U2, φ2) of S
1, where
U1 := (sin 2πt, cos 2πt) | t ∈ (0, 1),U2 := (sin 2πt, cos 2πt) | t ∈ (−1/2, 1/2),
φ1(sin 2πt, cos 2πt) = φ2(sin 2πt, cos 2πt) := t.
Prove that they are smoothly compatible and determine also the same differ-
ential structure described in Example 1.2.12 (E) and Exercise 8 above.
10. Let K be the surface of a cylinder and B1, B2 its bases. Show that K \(B1∪B2)
is a smooth manifold of dimension 2.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 21
1.2. Charts and atlases: formal definitions 21
11. Referring to Example 1.2.12 (A), determine the charts of the maximal atlases
of R, Rn, and those of any open set A ⊂ Rn.
12. Let ψ : R → R be the map given by ψ(x) = x3. Prove that (R, ψ) induces adifferential structure on R. Check whether the chart (R, ψ) is topologically or
smoothly compatible with the chart (R, idR). What is the conclusion about the
two differential structures of R, induced by the previous charts?
13. Prove that the Ck-compatibility of charts is not an equivalence relation.
14. Let (U, φ) be an m-dimensional chart of M . If a ∈ Rm is a fixed element, the
right translation by a is the map
µa : Rm −→ R
m : x 7→ x+ a.
On the other hand, for a fixed s ∈ R, the homothetie by s is the map
λs : Rm −→ R
m : x 7→ sx.
Prove that (U, µaφ) and (U, λs φ) are chart smoothly compatible with (U, φ).15. Let M be a smooth manifold. Then, for each x ∈M :
(a) There is a chart (U, φ) centered at x, i.e. φ(x) = 0.
(b) There is a chart (V, ψ) such that ψ(V ) = Rm.
(c) There is a chart (W,χ) such that χ(V ) = Rm, and χ(x) = 0.
Both charts belong to the given differential structure of M .
16. Prove that every chart (U, φ) on a set M is smoothly compatible with un-
countably many charts of M . [Hint: use Exercise 14 or decompose φ(U) into
appropriate open subsets]
17. Prove that a maximal atlas A minus a countable number of charts remains an
atlas. What conclusion can drawn from this result?
18. If a topological atlas A is maximal, prove that it contains charts which are not
C1-compatible, therefore A is not a Ck-atlas, for k ≥ 1. Furthermore, A cannot
be a differential atlas.
19. Consider the setX = X1∪X2 ⊂ R2, whereX1 := R×0 andX2 := D((0, 2), 1)
(: the disk of center (0, 2) and radius 1). Prove that:
(a) (X1, pr1) and (X2, idX2) are charts of X .
(b) The set A := (X1, pr1), (X2, idX2) is a smooth atlas of X .
What is the dimension of A?20. Using the fact that a straight line in R
3 through the origin is completely de-
termined by an equivalence class [a, b, c], where (a, b, c) 6= (0, 0, 0) [see Exam-
ple 1.2.12 (F)], prove that the elements of P2(R) are in bijective correspondence
with the aforementioned lines.
21. Define the projective space Pn(R) and its smooth structure.
22. Let U be an open subset of Rm and f : U → Rn be a smooth function. The
graph of f is the set
Γf := (x, f(x) |x ∈ U ⊂ U × Rn.
Show that Γf is an m-dimensional manifold.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 22
22 Differential Structures
23. Generalizing the Examples 1.2.12 (D1) and (D2), define a smooth structure on
the unit sphere Sn ⊂ Rn+1 centered at 0, using the analogs of stereographic
projections, and appropriate semispheres.
1.3 The canonical topology of a manifold
In this section we show that any topological or differential atlas on a setM induces,
in a natural way, a topological structure on M . For this purpose, it is sufficient
to consider topological atlases; consequently, all the results proved below hold a
fortiori for smooth manifolds.
Definition 1.3.1. Let A be a (not necessarily maximal) m-dimensional atlas on
M . A subset A of M will be called open if, for every (U, φ) ∈ A, the set φ(U ∩A)is open in R
m. The collection of all open subsets of M , induced by A, is denotedby TA.
Proposition 1.3.2. TA determines a topology on M .
Proof. Obviously ∅ ∈ TA. Also, for every (U, φ) ∈ A, by the definition of a chart,
φ(M ∩ U) = φ(U) is an open subset of Rm, thus M ∈ TA.TA is closed under arbitrary unions: Let (Ai)i∈I be an arbitrary family, with
Ai ∈ TA, for every i ∈ I. Then, for any (U, φ) ∈ A,
A ∩ U =
(
⋃
i∈I
Ai
)
⋂
U =⋃
i∈I
(Ai ∩ U).
Therefore,
φ(A ∩ U) = φ
(
⋃
i∈I
(Ai ∩ U))
=⋃
i∈I
φ(Ai ∩ U).
Since every φ(Ai ∩ U) is open in Rm, we prove the claim.
Similarly, for every A,B ∈ TA,
φ(
(A ∩B) ∩ U)
= φ(
(A ∩ U) ∩ (B ∩ U))
= φ(A ∩ U) ∩ φ(B ∩ U),
thus A ∩ B ∈ TA. By analogous arguments we show that TA is closed under finite
intersections. This completes the proof, in virtue of Definition A.1.1.
Proposition 1.3.3. Let A be an m-dimensional atlas on M and let TA be the
topology induced by A. Then every chart (U, φ) ∈ A has the following properties:
(i) U ∈ TA.(ii) The map φ : U → φ(U) is a homeomorphism.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 47
Chapter 2
The tangent bundle
One is accustomed, from calculus, to thinking of
the tangent plane to a smooth surface in R3 as a
linear subspace of R3 (or, perhaps, as the plane
obtained by translating this subspace to the point
of tangency). Since a general differentiable mani-
fold (e.g., a projective space) need not live nat-
urally in any ambient Euclidean space, one is
forced to seek another, intrinsic, characterization
of tangent vectors if one wishes to define tangent
spaces to such manifolds.
G. Naber [58, p. 198]
A differentiable map between Euclidean spaces f : U ⊆ Rm → R
n (U ⊆ Rm open)
is locally approximated by a linear map Df(x) : Rm → Rn, the differential (or
derivative) of f at x. In order to obtain an analogous approximation on manifolds,
we first need to associate a linear space (called the tangent space) to each point of
the manifold. Tangent spaces will be the domains and ranges of the differentials.
While in Real Analysis the differentials are defined between the constant spaces Rm
and Rn, the tangent spaces of manifolds vary with respect to their reference points.
The collection of all tangent spaces on a smooth manifold is a new smooth
manifold of double dimension constituting the prototype of a vector bundle. The
tangent bundle is the appropriate space to define the total differentials of smooth
maps between smooth manifolds.
2.1 The tangent space
We start with the kinematic definition of a tangent space, based on a tangency
notion of smooth curves. This is a geometric approach, much more simpler than
the one based on the notion of derivation. Although the latter lacks the (geometric)
47

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 48
48 The tangent bundle
intuition of the former, it is used very often for brevity reasons. We will deal with
derivations in a later section, after having acquired enough experience in working
with tangent vectors.
• In what follows, M ≡ (M,A) will denote an arbitrary m–dimensional smooth
manifold, without the topological restrictions of Convention 1.3.21. As a matter of
fact, the Hausdorff property and second countability are not needed throughout this
chapter.
Definition 2.1.1. A smooth curve on M is a smooth map α : J →M , where J
is an open interval in R with 0 ∈ J . The smoothness of α is meant in the sense of
Definition 1.3.1, where J is provided with the structure of an open submanifold of
R. We say that α passes through (or α is a curve at) x ∈ M if α(0) = x. For
convenience, we often take J to be a symmetric (open) interval of the form (−ε, ε).
A curve α, as above, is also called a (smooth) parametrized curve to emphasize
that α is merely a map of one variable (parameter) between manifolds and not a set
of points in M . This interpretation, quite different from that of Analytic Geometry,
allows one to talk about the continuity and differentiability of a curve.
Definition 2.1.2. Let α, β be smooth curves on M passing through x ∈M . Then
α and β are called tangent or equivalent at x, if there is a chart (U, φ) of M
such that x ∈ U and
(2.1.1) D(φ α)(0) = D(φ β)(0).
If α, β are tangent at x, we write α ∼x β
Remarks 2.1.3. 1) The terminology equivalent curves will be justified shortly.
2) Obviously, to define the tangency of two curves, C1–differentiability is suffi-
cient.
3) Since D(φ α)(0) ∈ L(R,Rm), we have that
(
D(φ α)(0))
(λ) = λ(
D(φ α)(0))
(1)
for every λ ∈ R. Therefore [see also Appendix B, equality(B.1.3)],
D(φ α)(0) = D(φ β)(0) ⇔(
D(φ α)(0))
(1) =(
D(φ β)(0))
(1) ⇔(φ α)′(0) = (φ β)′(0) ⇔(2.1.2)
(xi α)′(0) = (xi β)′(0)(2.1.3)
for all i = 1, . . . ,m. Recall that (xi) ≡ xii=1,...,m are the local coordinates induced
by the chart (U, φ).
We will show that Definition 2.1.1 is independent of the choice of charts con-
taining x, thus the tangency relation is well-defined.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 49
2.1. The tangent space 49
Proposition 2.1.4. If α, β are tangent at x ∈M , then
D(ψ α)(0) = D(ψ β)(0),
for every chart (V, ψ) of M with x ∈ V .
Proof. Assume that α, β are tangent at x. Then α(0) = β(0) = x, and D(φα)(0) =D(φβ)(0), for some chart (U, φ) with x ∈ U . For any other chart (V, ψ), with x ∈ V ,
we have in virtue of the ordinary chain rule:
D(ψ α)(0) = D(
(ψ φ−1) (φ α))
(0)
= D(ψ φ−1)(
(φ α)(0))
D(φ α)(0)= D(ψ φ−1)
(
(φ β)(0))
D(φ β)(0)= D
(
(ψ φ−1) (φ β))
(0)
= D(ψ β)(0).
Corollary 2.1.5. The tangency of curves at x ∈M is an equivalence relation.
Proof. Reflection and symmetry of α ∼x β are clear. Assume that α ∼x β and
β ∼x γ. The first implies that D(φ α)(0) = D(φ β)(0) for any chart (U, φ) with
x ∈ U . Similarly, D(φβ)(0) = D(φγ)(0) because of Proposition 2.1.4. Therefore,
α ∼x γ, which implies the transitivity of the relation.
In virtue of the preceding corollary, the set of smooth curves at x ∈ M is
partitioned into equivalence classes. The equivalence class of a curve α at x is
denoted by [(α, x)].
Definition 2.1.6. The set of equivalence classes of all smooth curves onM , passing
through x, is called the tangent space of M at x and will be denoted by TxM .
The elements of TxM are called tangent vectors at x.
Tangent vectors will be simply denoted by u, v, w etc. if there is no need to men-
tion explicitly the corresponding equivalence class of curves. The previous notation
and the term space suggest that TxM is something more than a set. Before proving
that, in fact, it is a vector space, we have the following.
Proposition 2.1.7. Let M be an m-dimensional smooth manifold and x ∈ M . If
(U, φ) is a chart at x, then the map
φ : TxM −→ Rm : [(α, x)] 7→
(
D(φ α)(0))
(1) = (φ α)′(0)
is a well defined bijection.
Proof. i) The map φ is well defined means that it is independent of the representative
of the class [(α, x)]. Indeed, let β ∈ [(α, x)]. Then, by definition, (φ α)′(0) =
(φ β)′(0), which proves the claim.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 50
50 The tangent bundle
ii) For the injectivity of φ, assume that [(α, x)], [(β, x)] ∈ TxM with φ([(α, x)]) =
φ([(β, x)]). Then (φ α)′(0) = (φ β)′(0) and Remark 2.1.3 (3) shows that α and β
are tangent at x, thus [(α, x)] = [(β, x)].
iii) Finally, to prove that φ is a surjection, we take any h ∈ Rm, and consider
the affine map (in fact the straight line through φ(x) with direction h)
ε : R −→ Rm : t 7→ φ(x) + th.
Obviously, ε is smooth with ε(0) = φ(x) and ε′(0) = h. Since ε is continuous,
and φ(U) is an open neighborhood of φ(x) = ε(0), there exists an open interval
J containing 0 such that ε(J) ⊂ φ(U). Hence, we can define the composite α :=
φ−1 ε|J : J → U ⊂M . Then α is a smooth curve on M , such that α(0) = x and
φ([(α, x)]) = (φ α)′(0) = ε′(0) = h.
This completes the proof.
For later use we single out the following useful conclusion derived from the proof
of surjectivity of φ:
Corollary 2.1.8. For every h ∈ Rm, the inverse of φ is given by φ
−1(h) = [(α, x)],
where α(t) = φ−1(φ(x) + th), with t varying in a suitable interval J ⊆ R such that
α(J) ⊆ φ(U).
The map φ identifies the sets TxM and Rm. Therefore, we can transfer the
algebraic structure of Rm to TxM by setting
(2.1.4a)u+ v := φ
−1 (φ(u) + φ(v)
)
λu := φ−1 (
λφ(u))
for every u, v ∈ TxM and λ ∈ R.
We note that the previous structure of TxM can be defined also by the relation
λu+ µv := φ−1
(λφ(u) + µφ(v)),
whence we obtain separately the addition and the scalar multiplication by setting,
respectively, u+ v := 1u+ 1v and λu := λu + 0u.
The following result is routinely checked.
Theorem 2.1.9. If M is an m-dimensional smooth manifold, x ∈ M and (U, φ)
a chart of M with x ∈ U , then the operations ( (2.1.4a)) induce a vector space
structure on TxM such that φ is a linear isomorphism.
If (U, φ), (V, ψ) are charts with x ∈ U ∩V , then we obtain the two isomorphisms
φ, ψ : TxM → Rm.
In general, φ 6= ψ, thus apparently they induce two different vector space structures
on TxM . However, this is not true. To verify this, let us denote by
(2.1.4b) λ⊙ u⊕ µ⊙ v := ψ−1(
λψ(u) + µψ(v))
,

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 51
2.1. The tangent space 51
the analogous operations induced by ψ. Then, to show that the two linear structures
on TxM coincide, we should show that
λ⊙ u⊕ µ⊙ v = λu+ µv,
or, equivalently,
(2.1.5) ψ−1(
λψ(u) + µψ(v))
= φ−1(
λφ(u) + µφ(v))
.
For our purpose we first need the following:
Lemma 2.1.10. If (U, φ) and (V, ψ) are charts containg x, then
ψ φ−1= D(ψ φ−1)(φ(x));
in other words, the following diagram is commutative.
TxM
Rm
D(ψ φ−1)(φ(x))
φ
Rm
ψ
Diagram 2.1
Proof. Let h ∈ Rm. Since φ is an isomorphism, there exists a unique [(α, x)] ∈ TxM
with φ([(α, x)]) = h. Consequently [see also (B.1.3)],(
ψ φ−1)(h) = ψ
(
[(α, x)])
=(
D(ψ α))
(1)
=(
D(ψ φ−1 φ α)(0))
(1)
=(
D(ψ φ−1)(φ α(0)) D(φ α)(0))
(1)
=(
D(ψ φ−1)(φ(x)))(
(φ α)′(0))
=(
D(ψ φ−1)(φ(x)))
(h),
as desired.
Remark 2.1.11. In the preceding proof, a representative of the class [(α, x)] is
also the curve φ−1 ε|J , where ε(t) = φ(x) + th (see Corollary 2.1.8. Using this
particular curve, the above series of equalities can be modified as follows:(
ψ φ−1)(h) = ψ
([
(φ−1 ε|J , x)])
=(
ψ φ−1 ε)
′
(0)
=(
D(ψ φ−1 ε)(0))
(1)
=(
D(ψ φ−1)(ε(0)) D(ε)(0))
(1)
=(
D(ψ φ−1)(φ(x)))
(ε′(0))
=(
D(ψ φ−1)(φ(x)))
(h).

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 52
52 The tangent bundle
Theorem 2.1.12. The vector space structure of TxM does not depend on the choice
of the chart (U, φ), as defined by (2.1.4a) and Theorem 2.1.9.
Proof. If (U, φ), (V, ψ) are charts at x, then (2.1.4b) is equivalent to
λψ(u) + µψ(v) =(
ψ φ−1)(λφ(u) + µφ(v)
)
,
which holds, since ψ φ1 is a linear map in virtue of Lemma 2.1.10.
Remark 2.1.13 (The tangent space of a surface).
Let S be a regular surface [see Example 1.2.12 (G)]. One way to define the tangent
space TpS at a point p ∈ S is the following: If (U, r) is a parametrization of S at
p, and q ∈ U with r(q) = p, then the tangent space of S at p is defined to be the
space TpS := Dr(q)(R2). Since Dr(q) is injective, the vectors
ru(q) :=∂r
∂u
∣
∣
∣
∣
q
= Dr(q)(e1), and rv(q) :=∂r
∂v
∣
∣
∣
∣
q
= Dr(q)(e2)
form a basis of Dr(q)(R2), thus TpS is the vector space spanned by ru(q), rv(q),and R
2 Dr(q)−−−−→ DTpS is a linear isomorphism (see, for instance, [13], [52], [62]).
On the other hand, thinking of S as a smooth manifold, we obtain the tangent
space of S at p as in the general case of Definition 2.1.6. To avoid confusion, let
us denote the latter space by ˜TpS. In particular, using the chart (˜U, φ) of S at p,
induced by (U, r); that is, ˜U = r(U) and φ = r−1, we obtain the linear isomorphism
˜TpSφ−→ R
2. Note that since φ = r−1 is taking values in S, Dφ(p) does not make
sense, thus ˜TpS cannot be interpreted as the image of it.
It is now clear that ˜TpS ≡ TpS via the isomorphism Dr(q) φ.An equivalent description of TpS, frequently used in the theory of surfaces, is
the following. First denote by C(S, p) the set of all smooth curves β : Jβ → R3
such that Jβ is an open interval containing 0, β(Jβ) ⊂ S, β(0) = p. Then we
define the set Sp := β′(0) |β ∈ C(S, p). Now, consider an arbitrary tangent vector
[(α, p)] ∈ ˜TpS, where α : Jα → S is a smooth curve with Jα open interval containing
0 and α(0) = p. Then
(Dr(q) φ)([(α, p)]) = Dr(q)(
φ α)′(0))
= α′(0) ∈ Sp.
Note that α being an S-valued smooth curve it is also smooth as an R3-valued
curve, because in the latter case it can be thought of as the composite of α and
the canonical inclusion i → S, thus α′(0) ∈ Sp. The association [(α, p)] 7→ α′(0)
is obviously injective. It is also surjective. Indeed, for an arbitrary β′(0) ∈ Sp, we
check that α(t) := φ−1(
q + tβ′(0))
determines a smooth curve in S through p, for
sufficiently small t. Therefore, TpS =(
Dr(q) φ)
(˜TpS) = Sp.
The tangent space TpS being a 3-dimensional vector subspace of R3 represents
a plane in R3 passing through 0. Thus there is a unit vector N vertical to TpS and
passing through p. The parallel translation of TpS to p is a plane passing through

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 53
2.1. The tangent space 53
N
P
vr
ur
p pE T Sº
Figure 2.1 Tangent plane and norma vector
p, called the tangent plane of S at p and denoted by Ep. Figure 2.1 above is a
familiar picture in which the tangent space of the surface at p is identified with the
tangent plane Ep, with the vectors N , ru and rv also translated to p. The role of N
is very important to the geometry of a surface because its “differentiation” leads to
the fundamental notion of curvature. More details can be found in the books cited
in the beginning of our comments.
Definition 2.1.14. Consider a chart (U, φ) at x, with coordinate functions
xii=1,...,m. If eii=1,...,m is the the canonical basis of Rm, then the set
φ−1
(ei)
i=1,...,mis a basis of TxM , called the canonical basis of TxM with
respect to (U, φ).
We customarily set
(2.1.6)∂
∂xi
∣
∣
∣
∣
x
:= φ−1
(ei), i = 1, . . . ,m.
The reader probably suspects that the left-hand side of (2.1.6) might have the
meaning of partial differentiation. Indeed this is true in a sense that will be explained
in § 2.3 below.
A consequence of the preceding considerations is that every vector u ∈ TxM is
written in the form
(2.1.7) u =
m∑
i=1
λi∂
∂xi
∣
∣
∣
∣
x
, λi ∈ R.
In the particular case of the (trivial) 1–dimensional manifold R, the canonical basis
of TsR (s ∈ R), with respect to the standard chart (R, idR), consists of the vector
(2.1.8)d
dt
∣
∣
∣
∣
s
:=(
idR)−1
(1).
The tangent space at a point of the cartesian product of two manifolds or at a
point of an open submanifold will be computed in the next section.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 54
54 The tangent bundle
Exercises 2.1.15. 1. Explain why the tangent space at any point f a vector space
identifies with the vector space itself.
2. Let u ∈ TxM . Can you specify a curve representing u in terms of the vector u
itself?
3. Let u, v ∈ TxM and λ ∈ R. Find curves γ, δ on M , such that u + v = [(γ, x)]
and λu = [(δ, x)].
3. Find a curve representing the zero element 0x ∈ TxM .
3. Find a curve representing the basic vector∂
∂xi
∣
∣
∣
∣
x
corresponding to the chart
(U, φ)..
3. Let the unit sphere and its point p = (0, 1, 0). If v ∈ TpS2 is the tangent
vector with coordinates (2,−1), with respect to the chart (U+y , φ
+y ) [see Exam-
ple 1.2.12 (D2)], find a smooth curve representing v.
3. Show that the curves α, β : R → R3, with α(t) = (t, 1 + t2, t) and β(t) =
(sin t, cos t, t) define the same tangent vector u ∈ T(0,1,0)R3. Compute the coor-
dinates of u.
8. Does the curve α : R→ S2 defines a tangent vector of S2? Find its coordinates
with respect to the appropriate charts derived from the stereographic projec-
tions and hemispheres.
9. If α : R→M2×2(R) is the smooth curve given by
α(t) :=
(
t+ 1 2t2
3t 2t+ 1
)
,
compute the coordinates of the tangent vector u = [(α, I)] ∈ TIM2×2(R), with
respect to the standard chart of M2×2(R). Here I denotes the unit matrix.
10. Let φ : R2 → R2 the map given by check
mapφ(t, s) :=
(
2t+ s
3,2t− s
3
)
.
Prove that (R2, φ) is a chart of the standard smooth structure of R2, and find
a curve representing the tangent vector
u = 2∂
∂x1
∣
∣
∣
∣
p
− 3∂
∂x2
∣
∣
∣
∣
p
,
where p =(
12 , 0
)
, and x1, x2 are the coordinates of the previous chart.
11. Let α : R → P2(R) be given by f(t) = [(2t + 1, 1, t2)]. Show that f is smooth
and determines a tangent vector u of P2(R). What are the coordinates of the
latter?
2.2 Differentials or tangent maps
Tangent spaces provide the appropriate vector spaces needed to define the differen-
tial of smooth maps, generalizing thus the ordinary derivative in Euclidean spaces.
More precisely:

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 145
Chapter 4
Lie groups
Lie groups are of the greatest impor-
tance in modern theoretical physics and
the subject can be approached from a va-
riety of perspectives.
C.J. Isham [37, p. 61]
Lie groups are groups provided with a smooth structure such that the operations of
multiplication and inversion are smooth maps. A particular feature of a Lie group
is the structure of the Lie algebra defined on the tangent space at the identity.
It is identified with the Lie algebra of all left (or right)-invariant vector fields of
the group. By means of its Lie algebra, a Lie group admits an exponential map,
generalizing the ordinary matrix exponential. Moreover, a Lie group has a natural
representation into its Lie algebra (the adjoint representation). Another interesting
property of Lie groups is that the left-invariant vector fields are complete and their
integral curves reflect the group structure. The aim of the present chapter is to
discuss these fundamental concepts.
4.1 Lie groups and Lie group morphisms
Throughout this chapter, G will mainly denote a multiplicative group with identity
(neutral) element e. The multiplication or product map will be denoted by
γ : G×G −→ G : (x, y) 7→ γ(x, y) := xy,
while the inversion map is
α : G −→ G : x 7→ α(x) := x−1
Scholium on the notation: γ comes from the Greek word γινόμενο, meaning product;
α is the first letter of αντιστροφή, the Greek word for inversion. We use for both
symbols bold typefaces to distinguish them from ordinary α and γ, usually denoting
curves. Occasionally, we will write x · y, if the factors have a complicated form.
145

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 146
146 Lie groups
A Lie group combines its algebraic structure with a differential structure in the
following sense of compatibility.
Definition 4.1.1. A Lie group is a group (in the algebraic sense) G together with
a smooth structure such that the operations of multiplication γ and inversion α are
smooth maps.
We will soon ascertain that it is redundant to incorporate the smoothness of α
in the very definition of a Lie group, because this is a consequence of the smoothness
of γ. However, for convenience, Definition 4.1.1 is in use in the majority of books.
In preparation to the proof of the above assertion, we introduce the following
notions of translation. More precisely, the left translation of G by an element
g ∈ G is the map
Lg : G −→ G : x 7−→ Lg(x) := gx,
whereas the right translation by g ∈ G is defined by
Rg : G −→ G : x 7−→ Rg(x) := xg.
Proposition 4.1.2. For every g ∈ G, the translations Lg and Rg are diffeomor-
phisms.
Proof. Since Lg = γ(g, ·) = γg, Exercise 1.4.17 (9) implies that Lg is smooth. On
the other hand, Lg Lg−1 = idG and Lg−1 Lg = idG, thus (Lg)−1 = Lg−1 is also
smooth, and Lg is a diffeomorphism. Similar arguments hold for Rg.
If U and V are subsets of any group G, then we set
U · V := γ(U × V ) = xy |x ∈ U, y ∈ V .
Lemma 4.1.3. Let G be a Lie group. Then
(i) For every open U ⊂ G and every g ∈ G, the set g U := Lg(U) is an open
subset of G. Similarly for Ug := Rg(U).
(ii) For every open subsets U and V of G, U · V is also open in G.
(iii) For any neighborhood U of e, there is a neighborhood V ⊂ U of e such that
V · V ⊂ U .
Proof. The sets g U and Ug are homeomorphic images of U (by Lg and Rg, respec-
tively), whence the first assertion. The second is a consequence of equality
U · V =⋃
g∈V
Ug.
Finally, given a neighborhood U of e, the continuity of γ and the product topology
imply the existence of two neighborhoods V1 and V2 of e such that γ(V1×V2) ⊆ U .
Setting V = V1 ∩ V2 we prove the last assertion.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 147
4.1. Lie groups and Lie group morphisms 147
We notice that the previous lemma is valid for every topological group, i.e.
a group (in the algebraic sense) equipped with a topology such that γ and α are
continuous. Topological groups form an important category of groups. Details can
be found, e.g., in [31] and [11].
Theorem 4.1.4. Let G be a group equipped with a smooth structure such that the
multiplication γ is smooth. Then the inversion map α is a diffeomorphism and G
becomes a Lie group.
Proof. H We first prove that the inversion α is smooth at e: Let (U, φ) be a chart
of G with φ(e) = 0 [see Exercise 1.2.15(15)] and V ⊂ U an neighborhood of e such
that V · V ⊂ U (by Lemma 1.4.3). We define the chart (V, ψ), where ψ = φ|V .Considering now the charts (V ×V, ψ×ψ) and (U, φ), of G×G and G, respectively,
with (e, e) ∈ G×G and e ∈ G, we see that γ(V × V ) = V · V ⊂ U , thus we obtain
the local representation of γ
Γ = φ γ (ψ × ψ)−1 : ψ(V )× ψ(V ) −→ φ(U).
shown also in the next commutative diagram.
V × V γ U
ψ(V )× ψ(V )
ψ × ψ
Γ φ(U)
φ
Diagram 4.1
Then, for every (0, u) ∈ ψ(V )× ψ(V ),
Γ(0, u) =(
φ γ (ψ × ψ)−1)
(0, u) =
= (φ γ)(
e, ψ−1(0))
= φ(
ψ−1(u))
= u.
Since we want to apply the implicit function theorem in Euclidean spaces (see
Theorem B.4.3), we compute the Jacobian matrix
J =
(
∂Γi
∂uj
∣
∣
∣
∣
(0,0)
)
where i, j = 1, . . . , n = dim(G). It should be noted that, for the correct application
of the implicit function theorem, the partial derivatives are taken with respect to
the n variables of the second factor in Rn×Rn. With this remark in mind, we check
that
∂Γi
∂uj
∣
∣
∣
∣
(0,0)
=∂
∂uj
∣
∣
∣
∣
0
(
Γi(0, ·))
= δij ,

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 148
148 Lie groups
thus detJ 6= 0. As a result, by the aforementioned theorem, there are neighborhoods
A and B of 0, and a smooth function f : A→ B, such that A×B ⊆ ψ(V )× ψ(V ),f(0) = 0 and Γ(a, f(a)) = 0, for every a ∈ A. Clearly, the sets W1 = ψ−1(A) ⊂ V
and W2 = ψ−1(B) ⊂ V are neighborhoods of e and
F = ψ−1 f ψ|W1: W1 −→W2
is a smooth map. Moreover, by Diagram 4.1 on the preceding page, and for every
x ∈W1,
γ(
x, F (x))
=(
φ−1 Γ (ψ × ψ))(
x, F (x)
)
=(
φ−1 Γ)(
ψ(x), ψ(F (x))
=(
φ−1 Γ)(
ψ(x), f(ψ(x))
= φ−1(0) = e;
in other words, x · F (x) = e, or F (x) = x−1, which implies that F = α|W1; hence,
α is smooth at e.
We now show that α is smooth at an arbitrary g ∈ G: With F as before, we
consider the smooth map (see Proposition 4.1.2)
Rg−1 F Lg−1 : gW1 −→W2 · g,shown also in the following diagram.
W1F
W2
gW1 = Lg(W1)
Lg−1
Rg(W2) =W2g
Rg−1
Diagram 4.2
Then, for every x ∈ gW1 (thus g−1x ∈ W1),
(
Rg−1 F Lg−1
)
(x) =(
Rg−1 F)(
g−1x)
=
= F(
g−1x)
· g−1 = α(
g−1x)
· g−1 = x−1gg−1 = x−1.
Therefore, α|gW1= Rg−1 F Lg−1 |gW1
, which shows that α is smooth at g, since
gW1 is a neighborhood of g by Lemma 4.1.3.
Finally, it is trivially checked that α is a bijection whose inverse coincides with
α itself, therefore it is a diffeomorphism. N
Corollary 4.1.5. Let G be a Lie group. If U ⊆ G and
U−1 := x−1 |x ∈ U = α(U),
then, the following assertions are true:

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 149
4.1. Lie groups and Lie group morphisms 149
(i) If U is open, then so is U−1.
(ii) For any neighborhood U of e, there exists a neighborhood V ⊂ U of e such
that V · V −1 ⊂ U .
Proof. Since α is a diffeomorphism, (i) clear. To prove (ii) we consider a neighbor-
hood W of e such that W ·W ⊂ U (see Lemma 4.1.3). Setting V = W ∩W−1, we
check that V = V −1; hence, V · V −1 ⊂W ·W ⊂ U .
By Convention 1.3.21, a smooth manifold is always assumed to be a Hausdorff
space. In the following result, we prove that this topological property is automati-
cally satisfied by a Lie group, as already noted in the comments following the above
convention.
Theorem 4.1.6. Let G be a group together with a smooth structure not satisfying
a priori Convention 1.3.21. Then G is a Hausdorff space.
Proof. Let g and h be two arbitrary distinct elements of G. Then g−1h 6= e. Since
G is a T1 space (see Proposition 1.3.13), there is a neighborhood U of e such that
(4.1.1) g−1h /∈ U.On the other hand, if W is a neighborhood of e such that W ·W−1 ⊂ U (as assured
by Corollary 4.1.5), then (g−1h) ·W is a neighborhood of g−1h such that
(4.1.2) W ∩ (g−1h) ·W = ∅.Indeed, if there were an element y in the previous intersection, then y = (g−1h)x,
for some x ∈W ; hence, g−1h = yx−1 ∈ W ·W−1 ⊂ U , which contradicts (4.1.1).
We now define the neighborhoods of g and h, respectively, U1 = gW and U2 =
hW . We claim that U1 ∩ U2 = ∅, for if there is a z ∈ U1 ∩ U2, then z = gx = hy,
for some x, y ∈ W . As a result, x = (g−1h)y ∈ (g−1h) ·W , i.e. x ∈ W ∩ (g−1h)W ,
a contradiction to (4.1.2). Therefore, U1 and U2 satisfy the Hausdorff property for
the elements g, h, and prove the theorem.
It is clear that the preceding proof relies, from its very beginning, on the basic
property of a smooth structure, namely the separation property T1. This is not
a property shared by every topological group, although most of the well known
examples are T1 spaces.
Examples 4.1.7.
(A) (Rn,+) is a Lie group
Taking into account the standard differential structure of Rn [see Example
1.2.13 (A)], the claim is obvious.
Note that this is a typical example of an abelian Lie group. We recall that a
group is abelian if the multiplication is commutative, whence the alternative term
commutative. In this case, we usually write x+ y instead of xy.
(B) The general linear group GL(n,R)

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 150
150 Lie groups
We recall that GL(n,R) consists of all invertible n×n real matrices provided with theoperation of matrix multiplication. Then GL(n,R), equipped with the open subman-
ifold structure induced from the vector space Mn×n(R) [see Example 1.3.17 (C)],
is a Lie group, as we routinely check in virtue of Example 1.4.8 (C). For the sake
of completeness, let us verify the smoothness of the inversion map A 7→ A−1. If
A = (aij) and A−1 = (bij), then
bij =1
detA(−1)i+j detAij ,
where Aij is the (n − 1) × (n − 1) submatrix of A obtained by deleting the ith
row and the jth column of A. Since det is a smooth function of the aij ’s [see
Exercise 1.4.17 (3)], so is every entry bij . Applying the global chart (GL(n,R),Φ)
we immediately see that the local representation of the inversion is smooth, and so
is the inversion itself.
(C) The multiplicative group R∗ = R \ 0=R -0This is a special case of (B), for n = 1.
(D) The unit circle S1 ⊂ R2
We consider the following multiplication in R2:
(* ) (a, b) · (c, d) = (ac− bd, ad+ bc).
An immediate computation shows that (a, b) · (c, d) ∈ S1, for every (a, b) and (c, d)
in S1. Therefore, restricting the previous multiplication to S1, we define the map
γ : S1 × S1 −→ S1 : γ((a, b), (c, d)) = (a, b) · (c, d).
Using one of the differential structures of S1, defined in Example 1.2.12 (E), or in
Exercises 1.2.14 (8) and 1.2.14 (9), we see that γ is smooth, thus S1 becomes a Lie
group.
Although Theorem 4.1.4 ensures the smoothness of the inversion map, we can
verify it directly from the definition of the above product rule. As matter of fact,
an easy computation yields
(a, b)−1 =1
a2 + b2(a,−b).
The reader undoubtedly recognizes that (*) is the multiplication of complex numbers
restricted to S1, since S1 =
z ∈ C : |z| = 1
, thus he/she may may use this
approach in the study of S1.
In Example 4.1.10 (A) we will show that the tangent bundle of a Lie group is
also a Lie group. The list of examples will be completed (not exhaustively) much
later, in § 5.4, by a few subgroups of GL(nR).
Definition 4.1.8. Let G, H be Lie groups. A map f : G→ H is a morphism of
Lie groups, if it is a smooth group homomorphism.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 151
4.1. Lie groups and Lie group morphisms 151
In most books a morphism of Lie group is called Lie group homomorphism.
We prefer the terminology of the above definition because of its categorical flavor.
Examples 4.1.9 (of morphisms). The determinant map
det: GL(n,R) −→ R∗ : A 7→ det(A)
and the ordinary exponential map
exp: R −→ R∗ : t 7→ et
are group homomorphisms, since det(A · B) = det(A) det(B) and exp(t + s) =
exp(t) exp(s). Their differentiability is immediately checked by routine application
of the standard differential structures of the spaces involved.
To complete the preceding examples of Lie groups and morphisms, we need to
compute the differentials of γ and α. First, Combining the Leibniz formula (2.2.14)
with the definition of the left and right translations, we obtain
(4.1.3)T(x,y)γ(u, v) = Txγy(u) + Tyγx(u)
= TxRy(u) + TyLx(v),
for every (x, y) ∈ G×G and (u, v) ∈ TxG× TyG.Next, to find Txα, we consider the commutative diagram
G(idG,α)
G×G
G
γ
Ce
Diagram 4.3
where Ce : G→ G is the constant map Ce(x) = e As a result, for every x ∈ G and
every u ∈ TeG,0 = TxC(u) = Tx
(
γ (idG,α))
(u)
= T(x,x−1)γ(
Tx idG(u), Txα(u))
= TxRx−1(u) + Tx−1Lx(Txα(u)),
which implies that
Tx−1Lx(Txα(u)) = −TxRx−1(u).
Taking into account that Lx is a diffeomorphism with (Lx)−1 = Lx−1 , it follows
that [see Example 2.2.9 (C)](
Tx−1Lx
)
−1= TLx(x−1)Lx−1 = TeLx−1 ;
hence,
(4.1.4) Txα(u) = −TeLx−1 TxRx−1(u) = −Tx(Lx−1 Rx−1)(u),
for every x ∈ G and every u ∈ TxG.We are now in a position to work out two more examples, as promised.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 152
152 Lie groups
Examples 4.1.10.
(A) The Lie group TG
We will prove that the tangent bundle TG of a Lie group G is a Lie group with
multiplication the differential of γ
Tγ : TG× TG ≡ T (G×G) −→ TG.
For convenience, the product Tγ(u, v) of any two tangent vectors u, v ∈ TG will be
denoted by u · v.Since Tγ and Tα are smooth maps (see Proposition 2.4.10), we only need to
show that TG is an (algebraic) group with multiplication map Tγ.
i) Tγ is associative: The associativity law (xy)z = x(yz) of G means that
(4.1.5) γ (γ × idG) = γ (idG×γ).
In virtue of Definition 2.4.8, combined with Theorem 2.2.6 and Exercise 2.2.15 (4),
differentiation of (4.1.5) leads to
Tγ (Tγ × idTG) = Tγ (idTG×Tγ).
Then, for every u, v, w ∈ TG, we have that
(u · v) · w = Tγ(
Tγ(u, v), w)
= Tγ (
Tγ × idTG
)(
(u, v), w)
= Tγ (
idTG×Tγ)(
u, (v, w))
= u · (v · w).
ii) 0e ∈ TeG is the unit of TG: Indeed, for every u ∈ TG with π(u) = x, (4.1.3)
implies that
u · 0e = Tγ(u, 0e) = T(x,e)γ(u, 0e)
= TxRe(u) + TeLx(0e)
= Tx idG(u) + 0x = u,
and, similarly,
u · 0e = Tγ(0e, u) = T(e,x)γ(0e, u)
= TeRx(0e) + TxLe(u)
= 0x + Tx idG(u) = u.
iii) The inverse of u is u−1 = Tα(u), for any u ∈ TG. As a matter of fact, assumingthat π(u) = x, (4.1.3) and (4.1.4) yield
u · u−1 = Tγ(
u, u−1)
= TxRx−1(u) + Tx−1Lx(Txα(u))
= TxRx−1(u)− Tx−1Lx
(
Tx(Lx−1 Rx−1)(u))
= TxRx−1(u)− TxRx−1(u) = 0Rx−1(x) = 0e,

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 153
4.1. Lie groups and Lie group morphisms 153
and, analogously,
u−1 · u = Tγ(
u−1, u)
= Tx−1Rx(Txα(u)) + TxLx−1(u)
= −Tx−1Rx
(
Tx(Lx−1 Rx−1)(u))
+ TxLx−1(u)
= −TxLx−1(u) + TxLx−1(u) = 0Lx−1(x) = 0e.
Therefore, u−1 = Tα(u) is indeed the inverse of u in TG.
(B) The zero section of TG is a Lie group morphism
We recall that [see Example 3.1.3 (A) and Remark 3.1.5 (1)] the zero section of TG
is the vector field Ω: G→ TG, given by Ω(x) = Ωx = 0x, for every x ∈ G. Since itis a smooth map, it suffices to show that Ω is a group homomorphism. Indeed, for
any x, y ∈ G, we haveΩ(x) · Ω(y) = Tγ(Ωx,Ωy) = T(x,y)γ(0x, 0y) =
= TxRy(0x) + TyLx(0y) = 0xy = Ω(γ(x, y)),
as desired.
Exercises 4.1.11.
1. Complete the details of Example 4.1.9.
2. Prove that
Lx Ly = Lxy, Rx Ry = Ryx, Lx Ry = Ry Lx,
for every x, y ∈ G.3. Prove the equalities
(TxLy)−1 = TyxLy−1 and (TxRy)
−1 = TyxRy−1 .
4. Verify equality (4.1.5) in Example 4.1.10 (A).
5. Show that (4.1.4) takes also the form
Txα(u) = −Tx(Rx−1 Lx−1)(u),
for every x ∈ G and every u ∈ TxG. Hence, Teα(v) = −v, for every v ∈ TeG.6. Find the expressions of the left and right translations of TG by any u ∈ TG,
denoted by Lu and Ru, respectively.
7. If G is an abelian Lie group, prove that TG is also an abelian Lie group.
8. Prove that the inversion map of an abelian Lie group is an (iso)morphism of
Lie groups.
9. If G, H are Lie groups, prove that G×H is a Lie group.
10. Explain why the n-torus T n is an abelian Lie group.
11. Let G be a smooth manifold that is also a group. Prove that G is a Lie group
if and only if the map
f : G×G −→ G : (x, y) 7→ xy−1
is smooth.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 154
154 Lie groups
4.2 The Lie algebra of a Lie group
The left invariant vector fields of a Lie group G, defined right below, form a Lie
algebra L(G), subalgebra of the the Lie algebra X (G) of all smooth vector fields
of G (see also the comments preceding Remark 3.3.3, p. 108). The algebra L(G)induces an isomorphic Lie algebra structure on the tangent space TeG, allowing to
view the Lie algebra of a Lie group in a different (but equivalent) way. The latter
interpretation turns out to be quite convenient in many cases.
The vector fields considered throughout this section are smooth (recall the con-
vention preceding Proposition 3.1.6 on page 97).
Definition 4.2.1. Let G be a Lie group. A vector field ξ ∈ X (G) is called left-
invariant if
(4.2.1) TLg ξ = ξ Lg,
for every g ∈ G. Equivalently, by Definition 3.5.1, ξ is Lg-related to itself.
Right-invariant vector fields are defined analogously by right translations. The
set of all left-invariant (resp. right-invariant) vector fields on G is denoted by L(G)[resp. R(G)]. It is also customary to denote the sets of left-invariant vector fields
L(G), L(H) etc. by g, h (: the Gothic characters for g, h, respectively). We will
follow this trend, although, occasionally, we will use the notation L(·).Applying (4.2.1) at any x ∈ G, we see that ξ is left-invariant if and only if
(4.2.2) TxLg(ξx) = ξ(Lg(x)) = ξgx; x, g ∈ G.
We will show that a left-invariant vector field of G is necessarily smooth. As
we have seen in the beginning of § 3.1, vector fields are sections of the tangentbundle. Hence, when we consider a section of the tangent bundle without further
qualifications, we mean a vector field not necessarily smooth from the outset. With
this terminology in mind we have:
Proposition 4.2.2. A section ξ : G → TG of the tangent bundle of G is a left-
invariant smooth vector field if and only if there exists a tangent vector v ∈ TeG,
such that
(4.2.3) ξx = TeLx(v),
holds for every x ∈ G.
Proof. Let ξ ∈ g. Then, for every x ∈ G, Definition 4.2.1 implies that
(4.2.4) ξx = ξ(xe) = (ξ Lx)(e) = (TLx ξ)(e) = TeLx(ξe),
thus we obtain (4.2.3) for v = ξe.
Conversely, let ξ : G→ TG be a section satisfying (4.2.3). Obviously,
ξe = TeLe(v) = Te idG(v) = idTeG(v) = v.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 155
4.2. The Lie algebra of a Lie group 155
On the other hand,
ξ(x) = ξx = TeLx(ξe) = TeLx(ξe) + TxRe(0x)
= T(e,x)γ(ξe,Ωx) = (Tγ (Ce,Ω))(x),
where Ce : G → TG is the constant map with Ce(x) = ξe, and Ω is, as usual, the
(smooth) zero vector field on G. Thus ξ is smooth as the composite of smooth maps.
Finally, ξ is left-invariant. Indeed, for every g, x ∈ G, (4.2.3) and Exercise 4.1.11 (4)yield
ξgx = TeLgx(ξe) = Te(Lg Lx)(ξe)
= TLx(e)Lg TeLx(ξe) = TxLg(ξx).
Corollary 4.2.3. Every left-invariant vector field ξ is completely determined by its
value ξe at the unit e of G.
As a consequence of the above corollary, we will see that there are as many
vector fields in g as the vectors of TeG. The resulting correspondence preserves the
algebraic structure of the spaces involved. Before this we prove the following.
Proposition 4.2.4. The set g is a Lie subalgebra of X (G).
Proof. Let ξ, η ∈ g and λ, µ ∈ R. Then
(λξ + µη)(x) = λξx + µηx = λTeLx(ξe) + µTeLx(ηe)
= TeLx(λξe + µηe) = TeLx ((λξ + µη)e) ;
that is, λξ + µη ∈ g, thus g is a vector subspace of X (G).On the other hand, let two arbitrary ξ, η ∈ g. For every g ∈ G, ξ is Lg-related
to ξ, and η is Lg-related to η. In virtue of Corollary 3.5.3, [ ξ, η ] is Lg-related to
[ ξ, η ]. In other words, [ ξ, η ] is left-invariant, i.e. [ ξ, η ] ∈ g. Therefore, g is a Lie
subalgebra of X (G).
The space g, with the structure induced by Proposition 4.2.4, is called the Lie
algebra of G.
Theorem 4.2.5. Let G be a Lie group. Then the map
(4.2.5) h : g −→ TeG : ξ 7→ h(ξ) := ξe
is a linear isomorphism.
Proof. Clearly, h is linear, for if ξ, η ∈ g and λ, µ ∈ R, then
h(λξ + µη) = (λξ + µη)e = λξe + µηe = λh(ξ) + µh(η).
Moreover, h is an injection because h(ξ) = ξe = 0e implies that
ξx = TeLx(0e) = 0x = Ωx; x ∈ G,

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 156
156 Lie groups
i.e., ξ coincides with the zero element of g ≤ X (G). Finally, h is a surjection:
Given a vector v ∈ TeG, we define the left-invariant vector field ξv ∈ g by setting
ξvx = TeLx(v) [see also (4.2.3)]. Then
h(ξv) = ξve = v,
which proves the last assertion and completes the proof.
From the preceding proof we single out the following useful formula:
(4.2.6) h−1(v) = ξv, with ξvx = ξv(x) = TeLx(v),
for every v ∈ TeG and x ∈ G.
Corollary 4.2.6. The tangent space TeG is endowed with the structure of a Lie
algebra such that the map (4.2.5) is a Lie algebra isomorphism. Thus, with this
structure, TeG is identified with g and may be interpreted as the Lie algebra of G.
Proof. For every u, v ∈ TeG, we define their bracket by setting
(4.2.7) [u, v] := [ξu, ξv]e = h([
h−1(u),h−1(v)])
,
Therefore, for arbitrary ξ, η ∈ g, we have h(ξ) = ξe, h(η) = ηe, and
(4.2.8) [h(ξ),h(η)] = [ ξe, ηe ] = h([
h−1(ξe),h−1(ηe)
])
= h[ ξ, η ]
which proves that h is a Lie algebra (iso)morphism.
As we have commented in Example 3.1.8 (B), X (M) is an infinite-dimensional
vector space over R. The same is true for X (G) if G is a Lie group. However, the
situation radically changes if we are restricted to the subspace g = L(G) of X (G).In fact, we obtain the following consequence of Theorem 4.2.5.
Corollary 4.2.7. The Lie algebra g of an n-dimensional Lie group G is an n-
dimensional vector space. Therefore, every Lie group is a parallelizable manifold.
Proof. Let (U, φ) be a chart on G at e and
∂
∂xi
∣
∣
∣
∣
e
1≤i≤n
the induced canonical
basis of TeG. Then the left-invariant vector fields
Xi := h−1( ∂
∂xi
∣
∣
∣
e
)
; i = 1, . . . , n,
form a basis for g, thus g is an n-dimensional vector space. Moreover, for each x ∈ G,(4.2.6) implies that the vectors
Xi(x) = TeLx
(
∂
∂xi
∣
∣
∣
∣
e
)
form a basis for TxG. Hence, by Example 3.1.8 (C), G is parallelizable.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 157
4.2. The Lie algebra of a Lie group 157
Corollary 4.2.8. There is a diffeomorphism ˜F : TG → G × g such that˜F∣
∣
TgG: TgG→ g ×G is a linear isomorphism and the diagram
TG˜F
G× g
G
pr1π
Diagram 4.4
is commutative.
Proof. Assume that dimG = n. Since G is parallelizable, there exists a diffeomor-
phism F : G : TG → G × Rn satisfying the properties listed in Example 3.1.8 (C).
The desired diffeomorphism is the map ˜F closing the next diagram.
G× Rn idG×φ−1
G× TeG
TG
F
˜F
G× g
idG×h
Diagram 4.5
In other words, ˜F = (idG×h) (idG×φ−1) F , where φ is the linear map induced
by a chart (U, φ) of G at e.
Example 4.2.9. The Lie algebra L(R∗)We give an explicit description of the left-invariant vector fields of the multiplicative
group R∗ [see also Example 4.1.7 (C)].
The left translation of R∗ by s ∈ R∗ is the maps Ls : R∗ → R∗ with Ls(t) = st,
for every t ∈ R∗. We already know that R admits the basic basic vector field d/dt
[see (3.1.2b)]. Since R∗ is an open submanifold of R, the restriction of d/dt to R∗
induces a basic vector field on R∗, denoted (for simplicity) by the same symbol.
If ξ ∈ L(R∗), then
(4.2.9) ξ = fd
dt,
where f ∈ C∞(R∗,R) is the (global) coordinate of ξ. On the other hand, the left
invariance of ξ implies that [see (4.2.4)]
(4.2.10) ξ(s) = T1Ls(ξ(1)), s ∈ R∗.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 158
158 Lie groups
Taking into account (2.2.12a), it follows from (4.2.10) that
(4.2.11) ξ(s) = T1Ls(ξ(1)) = T1Ls
(
f(1)d
dt
∣
∣
∣
1
)
= f(1)sd
dt
∣
∣
∣
∣
s
Also, (4.2.9) implies
(4.2.12) ξ(s) = f(s)d
dt
∣
∣
∣
∣
s
, s ∈ R∗.
Comparing (4.2.10) and (4.2.12), we see that
f(s) = f(1)s = f(s) idR∗(s); s ∈ R∗,
or f = f(1) idR∗ . Setting λ = f(1), (4.2.9) takes the form
(4.2.13) ξ = λ idR∗ ·d
dt.
Note that equality f(s) = f(1)s found earlier implies that f is a linear function.
Conversely, let ξ be a vector field of R∗ given by (4.2.13), for any λ ∈ R. This is
a left-invariant vector field on R∗ because, for every t, s ∈ R∗,
TtLs(ξt) = TtLs
(
λtd
dt
∣
∣
∣
∣
t
)
= λt TtLs
(
d
dt
∣
∣
∣
∣
t
)
= λtsd
dt
∣
∣
∣
∣
st
= λ
(
tsd
dt
∣
∣
∣
∣
st
)
= ξ(st).
Therefore, we conclude that
L(R∗) =
ξ = λ idR∗ ·d
dt
∣
∣
∣
∣
λ ∈ R
.
The general linear group GL(n,R), mentioned in Example 4.1.7 (B), is a very
important Lie group. Along with some of its subgroups, it is involved in many
geometrical structures and applications. The same applies to its Lie algebra, denoted
by gl(n,R). The structure of the later merits a more detailed treatment.
Theorem 4.2.10. The Lie algebra gl(n,R) of GL(n,R) can be identified with the
Lie algebra of n × n matrices Mn(R). Under this identification, the bracket of
gl(n,R) coincides with the commutator of matrices [see Exercise 3.3.5 (6)].
Before the proof, we recall a few facts from earlier sections and adapt them to
the present framework.
As we know, Mn(R) is an n2-dimensional manifold whose structure is defined
by the global chart (Mn(R),Φ), where
Φ(A) = (a11, . . . , a1n, a21, . . . , a2n, . . . , ann),
for every matrix A = (aij). The corresponding coordinate functions are now denoted
by xij , for all i, j = 1, . . . , n, thus
xij(A) = aij .

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 159
4.2. The Lie algebra of a Lie group 159
On the other hand, the tangent space TIMn(R) ofMn(R) at the identity matrix
I = (δij) can be identified with Rn2
by means of the linear isomorphism
Φ: TIMn(R) −→ Rn2
induced by Φ. If eiji,j=1,...,n is the natural basis of Rn2
, then the vectors
∂
∂xij
∣
∣
∣
∣
I
= Φ−1(eij); i, j = 1, . . . , n,
determine the canonical basis of TIMn(R), with respect to the chosen chart. Thus,
by Example 2.3.8 (C), any V ∈ TIMn(R) is written as
(4.2.14) V =
n∑
i,j=1
uij∂
∂xij
∣
∣
∣
∣
I
=
n∑
i,j=1
u(xij)∂
∂xij
∣
∣
∣
∣
I
.
We now define the linear isomorphism
(4.2.15) f = Φ−1 Φ: TI(Mn×n(R)) −→Mn(R).
Taking into account (4.2.14), we have that
f(V ) = Φ−1(u11, . . . , unn) =
u11 · · · u1n. . . . . . . . . . .
un1 · · · unn
=: V ;
therefore, the ij-th entry of f(V ) is precisely
(4.2.16a) f(V )ij = u(xij) = uij ,
which implies that
(4.2.16b) TIMn(R) ∋ Vf≡ V ∈Mn(R)
We also remind that, since GL(n,R) is open inMn(R),
(4.2.17) TIGL(n,R) ≡ TIMn(R)
(see Proposition 2.2.10). As a result, combining the linear isomorphisms (4.2.5) and
(4.2.15), along with (4.2.17), we obtain the linear isomorphism
F := f h : gl(n,R) −→Mn(R).
With the previous preparation we are in a position to give the
Proof of Theorem 4.2.10. First we find the entries of the matrix F (ξ) for any
ξ ∈ gl(n,R): Since F (ξ) = f(h(ξ)) = f(ξI), (4.2.16) implies
(4.2.18) F (ξ)ij = f(ξI)ij = ξI(
xij)
.
Also, for an ξ ∈ gl(n,R), its value ξ(A) at any A ∈ GL(n,R) is given byξA = ξ(A) = TILA(ξI);

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 160
160 Lie groups
hence, evaluation of the latter at the coordinate functions, together with (2.3.25),
yields
(4.2.19) ξA(
xij)
=(
TILA(ξI)) (
xij)
= ξI(
xij LA
)
.
But, for every B ∈ GL(n,R),(
xij LA
)
(B) = xij(
LA(B))
= xij(AB)
= xij(
(aij) · (bij))
= xij
(
(
n∑
k=1
aikbkj
)
)
=
n∑
k=1
aikbkj =
n∑
k=1
xik(A)xkj(B);
that is,
(4.2.20) xij LA =
n∑
k=1
xik(A) · xkj ,
where, clearly, xik(A) · xkj denotes the product of a real number with a real-valuedfunctions. In virtue of (4.2.20) and (4.2.18), we transform (4.2.19) into
ξA(
xij)
= ξI(
xij LA
)
= ξI
(
n∑
k=1
xik(A) · xkj)
=
n∑
k=1
xik(A) · ξI(
xkj)
=
n∑
k=1
xik(A) · F (ξ)kj ,
for every A ∈ Gl(n,R), whence the equality
(4.2.21) ξ(
xij)
=n
∑
k=1
xik · F (ξ)kj .
Applying now (4.2.18), Example 3.3.4 (A), and (4.2.21), we find for every ξ, η ∈gl(n,R):
F(
[ ξ, η ])
ij= [ ξ, η ]I
(
xij)
= ξI(
η(xij))
− ηI(
ξ(xij))
= ξI
(
n∑
k=1
xik · F (η)kj)
− ηI(
n∑
k=1
xik · F (ξ)kj)
=
n∑
k=1
(
ξI(
xik · F (η)kj)
− ηI(
xik · F (ξ)kj)
)
=n
∑
k=1
(
ξI(
xik)
F (η)kj − ηI(
xik)
F (ξ)kj
)
=
n∑
k=1
(
F (ξ)ikF (η)kj − F (η)ikF (ξ)kj)
=(
F (ξ) · F (η))
ij−
(
F (η) · F (ξ))
ij,

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 161
4.2. The Lie algebra of a Lie group 161
from which follows that
(4.2.22) F(
[ ξ, η ])
= F (ξ) · F (η)− F (η) · F (ξ).The preceding equality shows that the linear isomorphism F is a morphism of Lie
algebras, thus an isomorphism of Lie algebras identifying gl(n,R) withMn(R)), as
desired. Omitting F , we may write (4.2.22) as
[ ξ, η ] = ξ · η − η · ξ; ξ, η ∈ gl(n,R),
but the isomorphism F should be kept in mind.
To complete our definitions, we say that a Lie algebra A is called abelian if
[a, b] = 0, for every a, b ∈ A. This is an obvious consequence of the antisymmetry of
the bracket.
Example 4.2.11. The differential TI det: TIGL(n,R)→ T1R.
We want to compute TI det after the identifications TIGL(n,R) ≡ TIMn(R) ≡Mn(R) and T1R ≡ R. The trick working in this case is to use the well-known
equality det(
eX)
= etr(X), for every X ∈ Mn(R), where eX and tr(X) denote,
respectively, the exponential and the trace of X .
Let an arbitraryX ∈ GL(n,R) ≡Mn(R). As a tangent vector,X can be realized
as the velocity vector of a smooth curve passing through I. A convenient curve for
our purpose is given by α(t) := etX , t ∈ R, which yields
α(0) = I, and α(0) ≡ α′(0) =d
dt
(
etX)
∣
∣
∣
∣
t=0
.
Therefore,
(TI det)(X) = (TI det)(
α(0))
= T0(det α)(
d
dt
∣
∣
∣
∣
t=0
)
≡ d
dt(det α)
∣
∣
∣
∣
t=0
=d
dt
(
etX)
∣
∣
∣
∣
t=0
= tr(X).
Exercises 4.2.12.
1. Explain why condition [ , ] = 0 is necessary in the definition of an abelian Lie
algebra.
2. Find the Lie algebra of the Lie group (R,+).
3. Show that the left-invariant vector fields of Rn ≡ (Rn,+) are in bijective cor-
respondence with the vectors v ∈ Rn, such that
ξa =
n∑
i=1
vi∂
∂xi
∣
∣
∣
∣
a
, ∀ a ∈ Rn.
4. Prove that every morphism of Lie groups f : G→ H induces a morphism of Lie
algebras ˜f : g→ h.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 162
162 Lie groups
5. Continuing the preceding exercise, prove the following properties:
(i) If idG is the identity isomorphism of G, then ˜idG = 1g.
(ii) If f : G→ H and g : H → K are morphisms of Lie groups, then g f = g ˜f .(iii) If f : G→ H is an isomorphism of Lie groups, then ˜f : g→ h is a morphism
of Lie algebras.
6. Prove that that the Lie algebra of an abelian Lie group is also abelian.
7. Let a matrix A ∈ GL(n,R). Using the analogs of (4.2.16a) and (4.2.16b) provethat the differential TILA identifies with the translation LA of matrices. As a
result, there is a bijective correspondence between vector fields ξ ∈ gl(n,R) and
matrices B ∈ Mn(R) such that, when ξA ∈ TAGL(n,R) is viewed as a matrixinMn(R), then ξA = A ·B, for every A ∈ GL(n,R).
8. Let G be an n-dimensional Lie group and B = Xi | i = 1, . . . , n any basis of g(parallelization of G). Show that there are n3 constants Ck
ij given by
(4.2.23) [Xi, Xj ] =
n∑
k=1
CkijXk; i, j = 1, . . . , n.
They are called the structural constants of G, relative to B. Then verify thefollowing equalities:
Ckij = −Ck
ji,(4.2.24)n
∑
l=1
(
Cmil C
ljk + Cm
jl Clki + Cm
klClij
)
= 0,(4.2.25)
for all indices i, j, k,m = 1, . . . , n.
9. Following the pattern of Example 4.2.11, prove that (TA det)(AX) = (detA) ·tr(X), for every A ∈ GL(n,R) and X ∈ TAGL(n,R) ≡ Mn(R). Based on the
preceding result, compute (TA det)(Y ) for any Y ∈ TAGL(n,R).
4.3 One-parameter subgroups
An interesting property of the integral curves of the left-invariant vector fields of a
Lie group G is that they are complete, and their set is in a bijective correspondence
with the Lie algebra of G.
Definition 4.3.1. An one-parameter subgroup of a Lie group G is a morphism
of Lie groups α : R→ G.
Clearly, R is considered with the structure of the additive Lie group (R,+).
Stated differently, an one-parameter subgroup is a smooth curve defined on the
whole of R and satisfies the condition
α(t+ s) = α(t)α(s), t, s ∈ R.
By the very definition α(0) = e; hence, all one-parameter subgroups of G pass
through e.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 163
4.3. One-parameter subgroups 163
The set of all one-parameter subgroups of G will be denoted by Hom(R, G). Theterminology is due to the fact that α(R) is an (abelian) subgroup of G parametrized
by R.
Example 4.3.2. The ordinary exponential map exp: R ∋ t 7→ et ∈ R∗ is a one-
parameter subgroup of R∗.
Our aim is to prove that there is a 1–1 correspondence between the Lie algebra
g of G and the set Hom(R, G). First, with the notation of Theorem 4.2.5 [see also
equality (4.2.6)], we prove the following.
Proposition 4.3.3. Let α ∈ Hom(R, G) and v := α(0). If ξv ∈ g is the left-
invariant vector field with ξv(e) = v, then α is the integral curve of ξv with initial
condition α(0) = e.
Proof. We have to show that α(t) = ξv(α(t)), for every t ∈ R. In virtue of (2.2.13)
and (4.2.5), we have:
(4.3.1)
ξv(α(t)) = TeLα(t)(v) = TeLα(t)
(
α(0))
=
= TeLα(t)
(
T0α
(
d
dt
∣
∣
∣
∣
0
))
= T0(
Lα(t) α)
(
d
dt
∣
∣
∣
∣
0
)
.
The composite map in the last differential, evaluated at any s ∈ R, transforms as
follows:
(
Lα(t) α)
(s) = α(t)α(s) = α(t+ s) = (α λt)(s),
where λt, with λt(s) = t + s, is the left translation of (R,+) by t. Hence, (4.3.1)
yields
ξv(α(t)) = T0 (α λt)(
d
dt
∣
∣
∣
∣
0
)
= Ttα
(
T0λt
(
d
dt
∣
∣
∣
∣
0
))
= Ttα
(
λ′t(0)d
dt
∣
∣
∣
∣
λt(0)
)
= Ttα( d
dt
∣
∣
∣
∣
t
)
= α(t),
which proves the statement.
The preceding proposition implies that every α ∈ Hom(R, G) determines a left-invariant vector field ξv ∈ g with ξv(e) = v = α(0) ∈ TeG, whose integral curve
with initial condition e is precisely α. Conversely, we will prove that the integral
curve of any ξ ∈ g, with initial condition e, determines an one-parameter subgroup.
Before this we need the following auxiliary result:
Lemma 4.3.4. Let ξ ∈ g. If α : J = (−ε, ε)→ G is the integral curve of ξ satisfying
α(0) = e, then equality α(s+t) = α(s)α(t) holds for every t, s ∈ J such that t+s ∈ J .

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 164
164 Lie groups
Proof. We fix an s ∈ J and consider the curves
β(t) := α(s + t) = (α λs)(t), t ∈ −s+ J
γ(t) := α(s)α(t) = (Lα(s) α)(t), t ∈ Jwhere −s + J = λ−s(J) and, as before, λs is the left translation (R,+) by s.
Obviously, β and γ are smooth curves such that
β(0) = α(s) = α(s) · e = γ(0).
We show that both β and γ are integral curves of ξ. For β we have:
β(t) = Ttβ
(
d
dt
∣
∣
∣
∣
t
)
= Tt (α λs)(
d
dt
∣
∣
∣
∣
t
)
= Ts+tα
(
Ttλs
(
d
dt
∣
∣
∣
∣
t
))
= Ts+tα
(
λ′s(t)d
dt
∣
∣
∣
∣
λs(t)
)
= Ts+tα
(
d
dt
∣
∣
∣
∣
s+t
)
= α(s+ t),
or, since α is an integral curve of ξ,
β(t) = α(s+ t) = ξ(α(s + t)) = ξ(β(t));
that is, β is an integral curve of ξ. Similarly,
γ(t) = Ttγ
(
d
dt
∣
∣
∣
∣
t
)
= Tt(
Lα(s) α)
(
d
dt
∣
∣
∣
∣
t
)
= Tα(t)Lα(s)
(
Ttα
(
d
dt
∣
∣
∣
∣
t
))
= Tα(t)Lα(s)
(
α(t))
= Tα(t)Lα(s)
(
ξ(α(t)))
.
Since ξ is left-invariant, (4.2.2) implies that
γ(t) = Tα(t)Lα(s)
(
ξ(α(t)))
= ξ(
α(s)α(t))
= ξ(γ(t)),
showing that γ is also an integral curve of ξ, with the same initial condition as β;
therefore, β = γ on their common domain. As a result, α(s + t) = α(s)α(t), for
the chosen s and every suitable t. The same holds for every s ∈ J . This proves thelemma.
The integral curve in the preceding result seems not to be necessarily an one-
parameter subgroup, because we do not know yet that it is defined on the whole of
R. However, we do have the following important result.
Theorem 4.3.5. Every left-invariant vector field is complete.
Proof. Let ξ ∈ g be an arbitrary left-invariant vector field of G and αo : (−ε, ε)→ G
its integral curve with initial condition αo(0) = e. We will prove that αo can be
extended to an integral curve α defined on the whole of R, with the same initial
condition. To this end we consider a point to ∈ (−ε, ε), an integer n ∈ Z, and the
curve
αn : (nto − ε, nto + ε) −→ G : t 7→ αn(t) := αo(to)n · αo(t− nto).

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 165
4.3. One-parameter subgroups 165
If µ(t) = t− nto (the right translation of R by −nto), αn(t) takes the form
αn(t) = Lαo(to)n(
αo(t− nto))
=(
Lαo(to)n αo µ)
(t)
as shown also in the next commutative diagram.
(nto − ε, nto + ε) ∋ t µ t− nto ∈ (−ε, ε)
G ∋ Lαo(to)n(αo(t−nto))
αn
Lαo(to)nαo(t− nto) ∈ G
αo
Diagram 4.6
Then every curve αn is smooth, and its velocity vectors are computed as follows:
αn(t) = Ttαn
(
d
dt
∣
∣
∣
∣
t
)
= Tt(
Lαo(to)n αo µ)
(
d
dt
∣
∣
∣
∣
t
)
=(
Tα(t−nto)Lαo(to)n Tt−nto αo
)
(
Ttµ
(
d
dt
∣
∣
∣
∣
t
))
=(
Tαo(t−nto)Lαo(to)n Tt−ntoαo
)
(
d
dt
∣
∣
∣
∣
t−nto
)
= Tαo(t−nto)Lαo(to)n
(
Tt−ntoαo
(
d
dt
∣
∣
∣
∣
t−nto
))
= Tαo(t−nto)Lαo(to)n(
αo(t− nto))
Since t ∈ (nto − ε, nto + ε), it follows that t − nto ∈ (−ε, ε). Taking into accountthat ξ is left-invariant, and αo is an integral curve of ξ, we obtain:
αn(t) = Tαo(t−nto)Lαo(to)n(
αo(t− nto))
= Tαo(t−nto)Lαo(to)n(
ξ(αo(t− nto)))
= ξ(
αo(to)n · αo(t− nto)
)
= ξ(αn(t));
that is, αn is an integral curve of ξ. On the other hand,
nto ∈(
(n− 1)to − ε, (n− 1)to + ε)
= Dom(αn−1),
as well as,
αn−1(nto) = αo(to)n−1 · αo
(
nto − (n− 1)to)
=
= αo(to)n−1 · αo(to) = αo(to)
n = αn(nto),
whence we deduce that the curves αn−1 and αn are integral curves of ξ coinciding
at nto. According to Exercise 3.6.7 (6), the curves coincide on the intersection of
their domains and they extend to a unique integral curve of ξ on the union of their

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 166
166 Lie groups
domains. The union α of all such curves is defined on R and it is an integral curve
of ξ with α(0) = αo(0) = e.
We prove now that every integral curve of ξ is defined on the whole of R. Indeed,
for an x ∈ G, we setβ(t) := xα(t) ≡ x · α(t) = (Lx α)(t), t ∈ R.
Then β(0) = x, and
β(t) = Tα(t)Lx
(
Ttα
(
d
dt
∣
∣
∣
∣
t
))
= Tα(t)Lx
(
α(t))
= Tα(t)Lx
(
ξ(α(t))
= ξ(
xα(t))
= ξ(β(t));
hence, β is an integral curve of ξ. By the uniqueness of integral curves, β is the
unique integral curve of ξ with initial condition x and domain the whole of R.
An immediate consequence of Lemma 4.3.4 and Theorem4.3.5 is:
Corollary 4.3.6. Let ξ ∈ g and let α : R → G be the integral curve of ξ, with
α(0) = e. Then α ∈ Hom(R, G).
With the same assumptions as before, the last part of the proof of Theorem 4.3.5
yields:
Corollary 4.3.7. The integral curve of ξ, with initial condition x ∈ G, is the curve
β : R→ G given by β(t) = xα(t).
The preceding results establish now the relation between g and Hom(R, G) an-nounced in the beginning of this section. Namely, we prove:
Theorem 4.3.8. There is a bijective correspondence F between the sets g and
Hom(R, G).
Proof. We define the map F : g→ Hom(R, G) assigning to each ξ ∈ g the integral
curve of ξ with initial condition e. This is a uniquely determined curve and, accord-
ing to Corollary 4.3.6, it is an element of Hom(R, G). This shows that F is a well
defined map. Furthermore:
F is injective: Indeed, if ξ, η ∈ g and F(ξ) = F(η) = α, then
ξ(x) = TeLx(ξ(e)) = TeLx(α(0)) = TeLx(η(e)) = η(x).
for every x ∈ G; hence, ξ = η.
F is surjective: Let α ∈ Hom(R, G). Since α(o) ∈ TeG, Theorem 4.2.5 implies the
existence of a ξ ∈ g, with ξ(e) = α(0). Then F(ξ) = α, as an immediate consequence
of Proposition 4.3.3.
Let ξ ∈ g. Since ξ corresponds bijectively to a one-parameter subgroup α ∈Hom(R, G), which is the unique integral curve of ξ with α(0) = e, we also write αξ
instead of α, to remind us the correspondence of Theorem 4.3.8. Therefore,
(4.3.2) αξ = F(ξ), αξ(0) = e, αξ(0) = ξe.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 167
4.3. One-parameter subgroups 167
It is convenient to call αξ the one-parameter subgroup generated by ξ.
Let now any s ∈ R. Then sξ is a left-invariant vector field and determines the
one-parameter subgroup αsξ. The next result describes the relation between the
curves αsξ and αξ
Proposition 4.3.9. For every s, t ∈ R, the following equality holds true:
(4.3.3) αsξ(t) = αξ(st).
Proof. We fix an s ∈ R, and consider the curve
β : R −→ G : t 7→ β(t) := αξ(st).
Then β = αξ ls, where ls(t) := st is the left translation of R by s. Moreover,
β ∈ Hom(R, G) as the composite of the Lie group morphisms ls : R → R and
αξ : R → G. Consequently, β corresponds bijectively to a unique η ∈ g such that
ηe = β(0). Since
β(0) = T0(
αξ λs)
(
d
dt
∣
∣
∣
∣
0
)
= T0αξ
(
T0λs
(
d
dt
∣
∣
∣
∣
0
))
= T0αξ
(
sd
dt
∣
∣
∣
∣
0
)
= sαξ(0) = sξe,
it follows that ηe = sξe, thus, for every x ∈ G,η(x) = η(xe) = TeLx(ηe) = TeLx(sξe) = sTeLx(ξe) = sξ(x).
As a result, η = ξ, whence β = αsξ. Varying s in R, we obtain (4.3.3).
Example 4.3.10. Let f : G→ H be a morphism of Lie groups. If α ∈ Hom(R, G),there exists a unique ξ ∈ g, with α(0) = ξe. Then γ := f α : R → H is a Lie
group morphism, as the composite of such morphisms; thus, it is a one-parameter
subgroup of H . We want to find the left-invariant vector field η of H , corresponding
to γ. The former is completely determined by its value at the unit e of H (for
convenience, we denote by e the unit of all Lie groups). Therefore,
ηe = γ(0) = T0(f α)(
d
dt
∣
∣
∣
∣
0
)
= Tef(
α(0))
= Tef(ξe).
As a result, if L′y is the left translation of H by y, we find that
ηy = TeL′
y
(
Tef(ξe))
= Te(
L′y f)
(ξe),
for every y ∈ H .
Remark 4.3.11. Instead of the notation αξ, denoting the one-parameter subgroup
generated by ξ, one could equally write αv, where v = ξe ∈ TeG, a fact justified bythe identification g ≡ Hom(R, G) induced by Theorem 4.3.8.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 168
168 Lie groups
Exercises 4.3.12.
1. Let any ξ ∈ g. If αξ is the one-parameter subgroup of G corresponding to ξ,
explain why ξe = [(αξ, e)].
2. Let G be an abelian Lie group. Given ξ, η ∈ g, we denote by α, β ∈ Hom(R, G)their respective one-parameter subgroups. Prove that the map
α · β : R −→ G : t 7→ α(t) · β(t)is a one-parameter subgroup of G, and find the corresponding left-invariant
vector field of it. Moreover, if Hom(R, G) is considered as an (abelian) groupwith multiplication defined by α ·β, for every α, β ∈ Hom(R, G), conclude thatthe map F of Theorem 4.3.8 is a morphism of abelian groups.
3. Let G be an abelian Lie group. Show that αξ+η = αξ · αη, for every ξ, η ∈ g.
Equivalently, αu+v = αu · αξ, for every u, v ∈ TeG.4. Prove that a morphism of Lie groups f : G → H induces a group morphism
˜F : Hom(R, G) → Hom(R, H) (see Exercise 1 above). Relate ˜F with the mor-
phism of Lie algebras ˜f : g→ h of Exercise 4.2.12 (4).
4.4 The exponential map of a Lie group
We generalize here the ordinary exponential map exp: R → R∗ : t 7→ et, and the
matrix exponential exp:Mn(R) → GL(n,R) : A 7→ eA. The exponential map of a
Lie group G induces a special chart, which sends the one-parameter subgroups of
G to straight lines in the model space of the group.
We fix a Lie group G of dimension n, with respective algebra Lie g.
Definition 4.4.1. With the notation of (4.3.2), the exponential map of G is
defined to be the map
exp: g −→ G : ξ 7→ exp(ξ) := αξ(1).
The linear isomorphism h : g → TeG [see Theorem 4.2.5 and equality (4.2.5)]
determines the map
(4.4.1a) exp := exp h−1 : TeG −→ G;
therefore,
(4.4.1b) exp(ξ) = exp(ξe).
We notice that some authors consider exp as the exponential map of G. Although
we mainly use Definition 4.4.1, it will be convenient to identify the two exponentials
and write, without further warning,
(4.4.1c) exp(ξ) = exp(ξe)
as a consequence of the isomorphism h.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 169
4.4. The exponential map of a Lie group 169
Our immediate goal is to prove the smoothness of exp. Before this we recall
that TeG, as an n-dimensional vector space, is a smooth manifold [see Exam-
ple 1.2.12 (B)]. More explicitly: Fixing a chart (U, φ) of G at e, we consider the
induced linear isomorphism φ : TeG→ Rn(recall Theorem 2.1.9). Then(
TeG,φ)
is
a global chart on TeG and the corresponding maximal atlas(
TeG,φ)
′
determines
a smooth structure on TeG. Analogously, h determines on g the global chart (g,Ψ),
where Ψ = φ h, thus (g,Ψ)′ induces a smooth structure on g with respect to
which h is a diffeomorphism.
Theorem 4.4.2. The exponential map exp: g→ G is smooth.
Proof. The following proof, though a bit tricky, can be easily understood (see, for
instance, [49], [70]), and avoids the use of geodesics (as in [12], [46], [68]) or analytic
methods (e.g. [54]).
We define the map [see also Exercise 2.4.12 (5)]
Ξ: G× g→ T (G× g) ≡ TG× Tg
by setting
Ξ(g, ξ) := (ξg , 0ξ) ∈ TgG× Tξg,
where, as usual, 0ξ is the zero vector of Tξg. We intend to show that Xi is a vector
field on G× g. It is immediate that Ξ is a section of T (G× g). We check that it is a
smooth map by showing the smoothness of each component. Indeed, following the
proof of part ii) in Example 4.1.10 (A), we see that
ξg = TeLg(ξe) = T(g,e)γ(0g, ξe),
or, if Ω: G → TG is the zero section (zero vector field) of G, and pG : G × g → G,
pg : G× g→ g are the projections to the respective factors,
ξg = Tγ(
Ω(g),h−1(ξ))
=(
Tγ (
Ω pG, h−1 pg))
(g, ξ),
which proves that the first component of Ξ is a smooth map of (g, ξ) as a composite
of smooth maps. The second component is also smooth since it takes the form
0ξ =(
˜Ω pg)
(g, ξ),
where now ˜Ω: g → Tg is the zero section of g. Therefore, Ξ is a vector field on
G× g, as desired.
Next we find the integral curve β := β(g,ξ) of Ξ, with initial condition β(0) =
(g, ξ). Such a curve has the form β(t) =(
β1(t), β2(t))
, with
(4.4.2) β1(0) = g, β2(0) = ξ.
On the other hand, condition β(t) = Ξ(β(t)) implies that(
β1(t), β2(t))
= Ξ(
β1(t), β2(t))
=(
β2(t)(
β1(t))
, 0)
;

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 170
170 Lie groups
that is,
β1(t) = β2(t)(
β1(t))
,(4.4.3)
β2(t) = 0.(4.4.4)
Equality (4.4.4), along with the second of (4.4.2), yields
(4.4.5) β2(t) = ξ, ∀ t ∈ R.
Substituting (4.4.5) in (4.4.3), we find that β1(t) = ξ(
β1(t))
, which means that
β1 is the integral curve of ξ, with initial condition ξ(0) = g. Note that, since ξ is
complete, t varies also in the whole of R, thus the domain of β is R.
Let us denote by
θ : R×G→ G and Θ: R×G× g→ G× g
the flows of ξ and Ξ, respectively. Then, by Definition 3.7.1
Θt(g, ξ) = β(t) = (β1(t), ξ) =(
θ(t, g), ξ)
,
thus Θt is a smooth transformation of G× g, for every t ∈ R; hence,
(4.4.6) Θ1(g, ξ) =(
θ(1, g), ξ)
,
showing that Θ1 smooth. But θ(1, g) = θg(1) is the value at 1 of the integral curve
of ξ, with initial condition θg(0) = g; therefore, by Corollary 4.3.7, θg = g θe, where
θe is the integral curve of ξ with θe(0) = e. As a result,
θ(1, g) = θg(1) = g θe(1) = gαξ(1) = g exp ξ.
Consequently, for g = e, (4.4.6) yields Θ1(e, ξ) = (exp ξ, ξ), whence
exp ξ = (pg Θ1)(e, ξ).
This proves the smoothness of exp and completes the proof.
Proposition 4.4.3. The exponential map has the following properties:
exp(tξ) = αξ(t),(4.4.7)
exp(0) = e,(4.4.8)
exp(
(t+ s)ξ)
= exp(tξ) · exp(sξ) = exp(sξ) · exp(tξ),(4.4.9)
exp(nξ) = exp(ξ)n,(4.4.10)
for all s, t ∈ R, n ∈ N and ξ ∈ g.
Proof. Combining the definition of exp with (4.3.3), we obtain (4.4.7); namely,
exp(tξ) = αtξ(1) = αξ(t).
From the preceding equality it follows that
exp(0) = exp(0ξ) = αξ(0) = e,
proving (4.4.8). On the other hand,
exp(
(t+ s)ξ)
= αξ(t+ s) = αξ(t) · αξ(s) = exp(tξ) · exp(sξ),exp
(
(s+ t)ξ)
= αξ(s+ t) = αξ(s) · αξ(t) = exp(sξ) · exp(tξ).Since the left-hand sides of the above equalities coincide, the proof of (4.4.9) is now
clear, as well as that of (4.4.10).

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 171
4.4. The exponential map of a Lie group 171
Thinking again of g as a smooth manifold in the way described before The-
orem 4.4.2, from the chart (g,Ψ), with Ψ: g → Rn, we obtain the induced linear
isomorphism Ψ: T0g→ Rn. Thus T0g is also identified with g by means of the linear
isomorphism Ψ−1 Ψ: T0g→ g, as in the following diagram.
T0g
Rn
Ψ
Ψ−1 g
∼=
Diagram 4.7
Theorem 4.4.4. The differential T0 exp: T0g → TeG of exp at 0 ∈ g is a linear
isomorphism. In particular, after the identification T0g ≡ g, one has that T0 exp =
idg. Hence, exp is a local diffeomorphism at 0.
Proof. First observe that the range of T0 exp is TeG since exp(0) = e. For any fixed
ξ ∈ g, we consider the map
(4.4.11) β : R −→ g : t 7→ β(t) := tξ.
It is a smooth curve in g with β(0) = 0, thus the one-parameter subgroup αξ
generated by ξ, takes the form
(4.4.12) αξ(t) = exp(tξ) = (exp β)(t), t ∈ R.
Therefore,
(4.4.13)
ξe = αξ(0) =˙(
exp β)
(0) = T0(
exp β)
(
d
dt
∣
∣
∣
∣
0
)
= T0 exp
(
T0β
(
d
dt
∣
∣
∣
∣
0
))
= T0 exp(
β(0))
Since, by Exercise 2.2.15 (5), β(0) = [(β, β(0))] = [(β, 0)], we obtain
(4.4.14) ξe = T0 exp([(β, 0)]).
Applying Ψ to [(β, 0)], we have that (see Proposition 2.1.7)
Ψ(
[(β, 0)])
=(
Ψ β)
′
(0),
while, by the linearity of Ψ,
(Ψ β)(t) = Ψ(tξ) = tΨ(ξ) ∈ Rn.
As a consequence,
Ψ(
[(β, 0)])
=(
tΨ(ξ))
′
t=0= Ψ(ξ),

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 172
172 Lie groups
or, equivalently,
[(β, 0)] =(
Ψ−1 Ψ
)
(ξ).
Combining the preceding equality with (4.4.14) and (4.2.5), we obtain
(4.4.15) ξe = h(ξ) =(
T0 exp) (
Ψ−1 Ψ
)
)
(ξ).
Varying ξ in the definition of β, we see that (4.4.15) holds for every ξ ∈ g, whence
(see also the notations before Theorem 4.4.2)
(4.4.16) T0 exp = h Ψ−1 Ψ = φ−1 Ψ.
Since φ Ψ is a linear isomorphism, we have the first assertion of the statement.
Considering now the identification T0g ≡ g and omitting the term φ Ψ, wecan write T0 exp ≡ idg, i.e. T0 exp is a linear isomorphism; hence, in virtue of the
Inverse Function Theorem 2.2.7, exp is a local diffeomorphism at 0.
By the second assertion of Theorem 4.4.4, there exists a neighborhood Vo of 0 in
g, and a neighborhood Ne of e in G such that exp |Vo: Vo → Ne is a diffeomorphism,
whose inverse is the map exp−1 : Ne → Vo [for simplicity, we write exp−1 instead of
the more accurate (exp |Vo)−1]. Composing exp−1 with Ψ, we obtain the map
ν := Ψ exp−1 : Ne −→ Ψ(Vo),
also shown in the next diagram.
G ⊃ Ne
exp−1 Vo ⊂ g
Ψ(Vo) ⊂ Rn
Ψ
ν
Diagram 4.8
The set Ψ(Vo) is open in Rn and ν is a diffeomorphism; hence, by Proposition 1.4.12,
the pair (Ne, ν) is a chart of G with e ∈ Ne, called the normal chart at e.
Proposition 4.4.5. Let any one-parameter subgroup α ∈ Hom(R, G). Then the
map ν of the normal chart sends the part of α(R) contained in Ne to a line segment
in Rn passing through 0.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 173
4.4. The exponential map of a Lie group 173
Figure 4.1 The normal chart at e ∈ G
Proof. In virtue of (4.3.2) and Theorem 4.3.8, we may write α = αξ for some ξ ∈ g.
Then, for every t ∈ R such that αξ(t) ∈ Ne, we see that
ν(
αξ(t))
=(
Ψ exp−1)(
αξ(t))
= Ψ(
exp−1(exp(tξ)))
= Ψ(tξ) = tΨ(ξ),
which proves the statement.
Examples 4.4.6.
(A) Comparison of φ and ν
We will show that the linear isomorphisms φ : TeG→ Rn and ν : TeG→ Rn, induced
respectively by the charts (U, φ) and (Ne, ν) coincide. Recall that (U, φ) is the chart
of G at e, mentioned in the discussion before Theorem 4.4.2 and used throughout
the ensuing results.
Indeed, by definition, ν exp = Ψ. Differentiating the previous equality at 0, we
obtain in virtue of (4.4.16):
T0Ψ = T0(ν exp) = Teν T0 exp = Teν φ−1 Ψ.
Applying (2.2.4a), the preceding equality leads to
Ψ = idRn T0Ψ = idRn Teν φ−1 Ψ = ν φ−1 Ψ
which implies that φ = ν.
Note. Let (xi) and (yi), i = 1, . . . , n, be the coordinates of the charts (U, φ) and
(Ne, ν), respectively. Then, the corresponding bases of TeG coincide, because
∂
∂xi
∣
∣
∣
∣
e
= φ−1(ei) = ν −1(ei) =
∂
∂yi
∣
∣
∣
∣
e
holds for every i = 1, . . . , n.
(B) Lie group morphisms and exponential maps

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 174
174 Lie groups
Let G, H be Lie groups with corresponding Lie algebras g, h and exponential maps
expG, expH . Let f : G→ H be a Lie group morphism. Then, in virtue of (??), we
will show that the following diagram is commutative:
TeGTef
TeH
G
expG
f H
expH
Diagram 4.9
Recall that e denotes the unit of both G and H .
Indeed, for any u ∈ TeG, we set v := Tef(u) ∈ TeH . By Theorem 4.2.5 there
are ξ ∈ g and η ∈ h, such that u = ξe and v = ηe, respectively. Moreover [see
(4.3.2) and Theorem 4.3.8], we find one-parameter subgroups αξ ∈ Hom(R, G)and βη ∈ Hom(R, H) such that αξ(0) = e, αξ(0) = ξe = u, and βη(0) = e,
βη(0) = βe = v. Then (see also Example 4.3.10)
(4.4.17)(
expH Tef)
(u) = expH(
Tef(ξe))
= expH(ηe) = βη(1).
On the other hand,( ˙f αξ
)
(0) = T0(f αξ)
(
d
dt
∣
∣
∣
∣
0
)
= Tef(
αξ
)
(0) = Tef(u) = ηe;
therefore, f αξ is the unique one-parameter subgroup of H with( ˙f αξ
)
(0) = ηe,
thus f αξ = βη. Consequently, (4.4.17) transforms into
(4.4.18a)
(
expH Tef)
(u) = βη(1) = (f αξ)(1) =
= f(
αξ(1))
= f(
expG(ξ))
=(
f expG)
(u),
for every u ∈ TeG, whence the commutativity of Diagram 4.9.
If we consider the Lie algebra morphism ˜f : g → h induced by f [see Exer-
cise 4.2.12 (4)], then we obtain equality
(4.4.18b) expH ˜f = f expG,which amounts to the commutativity of the next diagram.
g˜f
h
G
expG
f H
expH

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 175
4.4. The exponential map of a Lie group 175
Diagram 4.10
We leave the proof of (4.4.18b) to the reader.
(C) Exponentials and derivations induced by vector fields
Viewing a vector field ξ ∈ g as a derivation (see Theorem 3.2.3), we will prove that
(4.4.19) ξx(f) =(
f(
x exp(tξ))
)
′
(0) = limt→0
1
t[f(x exp(tξ)) − f(x)].
for every x ∈ G and f ∈ C∞(G,R).To this end observe that the left invariance of ξ and (2.3.25) yield
ξx(f) =(
TeLx(ξe))
(f) = ξe(f Lx),
or, because ξe = αξ(0),
ξx(f) =(
αξ(0))
(f Lx) =
(
T0αξ
(
d
dt
∣
∣
∣
∣
0
))
(f Lx)
=d
dt
∣
∣
∣
∣
0
(
f Lx αξ
)
=(
f Lx αξ
)
′
(0).
Furthermore, since αξ(t) = exp(tξ), we see that(
f Lx αξ
)
(t) = f(
Lx(αξ(t)))
= f(
x exp(tξ))
.
Therefore,
ξx(f) =(
f Lx αξ
)
′
(0) =(
f(x exp(tξ)))
′
(0).
(D) The flow θ : R×G→ G of a ξ ∈ g in terms of exp
Since θx(t) is the integral curve of ξ with initial condition x ∈ G, equality (4.4.7)
implies that θx(t) = xαξ(t) = x exp(tξ). Therefore, after (4.4.1c),
(4.4.20) θ(t, x) = θx(t) = θt(x) = x exp(tξ) = x exp(tξe).
In particular,
θt(x) = x exp(tξ) = Rexp(tξ)(x); x ∈ G,
implying that
(4.4.21) θt = Rexp(tξ) = Rexp(tξe).
(E) The exponential of GL(n,R)
Let ξ ∈ gl(n,R) be a left-invariant vector field on GL(n,R), and let us denote
by A : R → GL(n,R) the one-parameter subgroup generated by ξ. Since A is the
integral curve of ξ with A(0) = I,
(4.4.22) ξA(t) = ξ(A(t)) =A(t).

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 176
176 Lie groups
By Exercise 4.2.12 (7) and the identification fA : TA(t)GL(n,R)∼=−−→ Mn(R), ξA(t)
identifies with the product of matrices A(t)·B, where B is the matrix corresponding
to ξI [via the identification fI : TIGL(n,R)∼=−−→Mn(R)].
On the other hand, to find the matrix corresponding toA(t), we check that
A(t) = TtA
(
d
dt
∣
∣
∣
∣
t
)
=
n∑
i,j=1
[
TtA
(
d
dt
∣
∣
∣
∣
t
)]
(
xij) ∂
∂xij
∣
∣
∣
∣
A(t)
=
n∑
i,j=1
d
dt
∣
∣
∣
∣
t
(
xij A) ∂
∂xij
∣
∣
∣
∣
A(t)
=n
∑
i,j=1
A′ij(t)∂
∂xij
∣
∣
∣
∣
A(t)
,
where Aij(t) = (xij A)(t) = xij(A(t)). Hence, the matrix corresponding to A(t) is
precisely(
A′ij(t))
, thus (4.4.22) identifies with
A′(t) = A(t) · B,which implies A(t) = etB, the analog of αξ(t) = exp(tξe). In particular, e
B = A(1),
corresponds to αξ(1) = exp(ξe).
In conclusion, the exponential of GL(n,R) is identified with the matrix expo-
nential. For the properties of the latter we refer to [4], [43], and [70].
Exercises 4.4.7.
1. Prove that the smooth structure of TeG does not depend on the choice of the
chart (U, φ) containing e.
2. Prove that exp(−tξ) =(
exp(tξ))
−1, for every t ∈ R and ξ ∈ g.
3. If G is an abelian Lie group, prove that
exp(ξ + η) = exp(ξ) · exp(η)for every ξ, η ∈ g.
4. Prove equality (4.4.18b).
5. Let (Ne, ν) be the normal chart on G. If x ∈ G, prove that the pair (Nx, νx),
where Nx = Lx(Ne) and νx = ν Lx−1, is a chart on G containing x. Moreover,
if β is the integral curve of some ξ ∈ g, with β(0) = x, prove that νx(
β(R)∩Nx
)
is contained in a straight line in Rn passing through 0.
4.5 The adjoint representation
The representation of the title turns out to be of particular importance in the
theory of connections on principal bundles and in gauge theories, subjects tackled
in advanced treatises.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 243
6.3. Connections 243
Remark 6.2.8. If we start with a connected smooth manifold M without assum-
ing beforehand any other topological property, it is clear that the existence of a
Riemannian structure onM imposes on it also the Hausdorff property. Thus, in the
case of such a manifold, Corollary 6.2.7 has an if and only if expression.
Exercises 6.2.9.
1. Verify equalities (6.2.4) and (6.2.5).
2. We define the following relation in a manifold M :
x ∼ y ⇔ x and y are joined by a piecewise smooth curve.
Show that ∼ is an equivalence relation in M and all the equivalence classes [x],
x ∈M , are open and closed subsets of M . How can this result be used to prove
Lemma 6.2.2?
3. Let α : [a, b] → M be a (piecewise) smooth curve. A reparametrization of
α is a (piecewise) smooth curve β : [a′, b′] → M such that β = α h, whereh : [a′, b′] ∋ s 7→ h(s) = t ∈ [a, b] is a diffeomorphism (in the ordinary sense of
calculus). Then show that Lg(α) = Lg(β), which means that
the length of a (piecewise) smooth curve is independent of the
parametrization of the curve.
4. Show that the distance function dg : M ×M → R, induced by a Riemannian
structure g, is continuous.
5. Let (M, g) and (N, g′) be Riemannian manifolds. An isometry of M onto N
is a diffeomorphism f : M → N such that
gx(u, v) = g′f(x)(
Txf(u), Txf(v))
,
for every x ∈M , and every u, v ∈ TxM . Then prove that equality
Lg′(f γ) = Lg(γ)
holds for every (piecewise) smooth curve in M ; in other words,
isometries preserve the length.
6. Let f : M → N be an isometry as in the preceding exercise. Then show that
f−1 is also an isometry
7. With the notation of the Exercise 5, prove that dg′
(
f(x), f(y))
= dg(x, y), for
every x, y ∈M . Therefore,
isometries preserve the distance.
8. Prove that the isometries of a Riemannian manifold (M, g) (onto itself) form a
group.
6.3 Connections
The notion of a connection can be traced back to the early attempts of E.
B. Christoffel (ca. 1869), M.M.C. Ricci and T. Levi-Civita (between 1901–1917)

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 244
244 Riemannian Structures and Connections
to differentiate vector and tensor fields in a “covariant” way to preserve, so to
speak, the character of the fields. The geometric interpretation of such a covariant
derivation was given by Levi-Civita in terms the notion of parallel displacement on a
surface. Since then, connections were defined on manifolds and fiber bundles (a short
note on this development can be found e.g. in [41]), and they have had a profound
effect on the development of differential geometry itself and related disciplines, as
well as to modern theories of physics.
In this section we treat connections in the sense of J.L. Koszul (ca. 1950). This
approach is quite elegant and easily manipulated. With this background the reader
may grasp many related notions (such as the parallel displacement and the holonomy
groups), other generalizations to fiber bundles, as well as applications to physics,
mechanics and elsewhere, which are beyond the scope of this book.
Nowadays there exist so many definitions of a connection (within various frame-
works, of course), that M. Spivak writes, in his particular style (see [68, Vol. V,
p. 602]:
I personally feel that the next person to propose a new
definition of a connection should be summarily executed.
Definition 6.3.1. Let M be a smooth manifold. A connection or covariant
derivation on M is an R-bilinear map
∇ : X (M)×X (M) −→ X (M) : (ξ, η) 7→ ∇ξη := ∇(ξ, η),satisfying the following conditions:
∇fξη = f ∇ξη,(C. 1)
∇ξ(fη) = f ∇ξη + ξ(f) · η,(C. 2)
for every ξ, η ∈ X (M) and f ∈ C∞(M,R). ∇ξη is called the covariant derivative
of η in the direction of ξ.
Condition (C. 1) also implies that ∇ is C∞(M,R)-linear with respect to the
first variable, that is ∇fξ+gηζ = f ∇ξζ + g∇ηζ, for every f, g ∈ C∞(M,R), and
ξ, η, ζ ∈ X (M). This is not true for the second variable due to the Leibniz (or
product) rule expressed by condition (C. 2).
A connection ∇ (read nabla or del) is also called a linear or affine connection
because, in the case of a finite-dimensional manifold M , a covariant derivative is
equivalent to the former, determined by an appropriate horizontal distribution on
T (TM) or by a connection map. For details we refer, e.g. to [12], or the more
advanced [27], [41], [71].
Examples 6.3.2.
(A) Connections over charts
Consider a chart (U, φ) of an m-dimensional manifold M . To simplify our compu-
tations, the corresponding basic vector fields (3.1.3) are abbreviated as follows:
(6.3.1) ∂i :=∂
∂xi, 1 ≤ i ≤ m.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 245
6.3. Connections 245
Then, for two vector fields ξ and η in ∈ X (U), we write
ξ =m∑
i=1
ξi ∂i , η =m∑
i=1
ηi ∂i,
where the coefficients are the (smooth) coordinates of the fields. Setting
(6.3.2) ∇ξη :=
m∑
i=1
ξ(ηi) · ∂i,
we obtain a connection on the open submanifold U of M . Indeed, R-bilinearity and
(C. 1) are immediately checked. On the other hand, for every ξ, η ∈ X (U), as above,and every f ∈ C∞(U,R), we have that
∇fξη =
m∑
i=1
fξ(ηi) · ∂i = f
m∑
i=1
ξ(ηi) · ∂i = f ∇ξη,
whereas [see also (3.2.1b)]
∇ξ(fη) =
m∑
i=1
ξ(fηi) · ∂i =m∑
i=1
(
ξ(f)ηi + fξ(ηi))
· ∂i
=m∑
i=1
ξ(f)ηi · ∂i +m∑
i=1
fξ(ηi) · ∂i
= ξ(f)
m∑
i=1
ηi · ∂i + f
m∑
i=1
ξ(ηi) · ∂i
= ξ(f)η + f ∇ξη.
Connection (6.3.2) is a particular case of the following example.
(B) Connections on parallelizable manifolds
Let M be an m-dimensional parallelizable manifold with a parallelization B =
X1, . . . , Xm [recall Example 3.1.8 (C)]. Given two vector fields of M
ξ =
m∑
i=1
ξiXi, η =
m∑
i=1
ηiXi,
we set
∇ξη :=
m∑
i=1
ξ(ηi) ·Xi.
Working exactly as in the preceding example, we check that∇ is indeed a connection
on M . This is the so-called direct connection, relative to the parallelization B.
Proposition 6.3.3. Let ∇ be a connection on a smooth manifold M and ξ, η ∈X (M). If A is an open subset of M such that ξ|A = 0 or η|A = 0, then ∇ξη
∣
∣
A= 0.
This property characterizes ∇ as a local operator.
We clarify that ∇ξη|A ≡(
∇ξη)∣
∣
A.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 246
246 Riemannian Structures and Connections
Proof. Let any x ∈ A. By Proposition 1.5.2, there are open sets V , W in M , with
x ∈ W ⊂ W ⊂ V ⊂ V ⊂ A, and a smooth bump function f : M → R such that
f |W = 1 and f |V c = 0. We consider the following cases:
i) Assume that ξ|A = 0. Then, taking into account the assumption and the form
of f , the evaluation of fξ on A and Ac implies that (fξ)(x) = 0, for every x ∈ M ,
i.e. fξ = 0. Thus (C. 1) and the R-bilinearity of ∇ yield
∇fξη = f ∇ξη = 0;
therefore, for every x ∈ A,(
∇fξη)
(x) =(
f ∇ξη)
(x) = f(x) · (∇ξη)(x) = 1 · (∇ξη)(x) = 0,
whence (∇ξη)(x)|A = 0.
ii) If η|A = 0, again fη = 0, therefore
∇ξ(fη) = f ∇ξη + ξ(f) · η = 0,
or, by evaluating the latter at any x ∈ A,(
∇ξ(fη))
(x) = f(∇ξη)(x) + ξx(f) · η(x) = 0.
Since f is constantly 1 in the neighborhood V of x, equality (2.3.10) implies that
ξx(f) = 0. As a result,
(∇ξη)(x) = (∇ξfη)(x) = 0; x ∈ A,showing also that (∇ξη)|A = 0.
An immediate consequence of Proposition 6.3.3 is the following:
Corollary 6.3.4. Let ∇ be a connection on M and A ⊂M open. If ξ1, ξ2 ∈ X (M),
with ξ1|A = ξ2|A, then(∇ξ1η)|A = (∇ξ2η)|A , for every η ∈ X (M).
Similarly, if η1, η2 ∈ X (M), with η1|A = η2|A, then(∇ξη1)|A = (∇ξη2)|A , for every ξ ∈ X (M).
Proposition 6.3.5. Let ∇ be a connection on M and x ∈M . If ξ1, ξ2 ∈ X (M) are
vector fields such that ξ1(x) = ξ2(x), then
(∇ξ1η)(x) = (∇ξ2η)(x),
for every η ∈ X (M).
Proof. In virtue of the R-linearity of ∇ with respect to the first variable, it suffices
to prove that, if ξ ∈ X (M) with ξ(x) = 0, then (∇ξη)(x) = 0, for every η ∈ X (M).
To this end we consider a coordinate chart (U, φ) = (U ;x1, . . . , xm) of M at x.
Then, by (6.3.1),
ξ|U =
m∑
i=1
ξi ∂i.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 247
6.3. Connections 247
As in the proof of Proposition 6.3.3, there are (open) neighborhoods W , V of x,
such that x ∈ W ⊂W ⊂ V ⊂ V ⊂ U and a smooth bump function f with f |V = 1
and f |V c = 0. We define the following extensions of ξi and ∂i, respectively:
˜ξi(x) =
f(x)ξi(x), x ∈ U,0, x /∈ U,
˜∂i(x) =
f(x)∂i, x ∈ U,0, x /∈ U.
Obviously ˜ξi ∈ C∞(M,R) and ˜∂i ∈ X (M). Setting
˜ξ :=
m∑
i=1
˜ξi ˜∂i,
we see that ˜ξ ∈ X (M), with ˜ξ = ξ|W . Therefore, for every η ∈ X (M) and every
z ∈W , Proposition 6.3.3 implies that
(
∇ξη)
(z) =(
∇ξη)
(z) =(
∇(∑m
i=1ξi∂i) η
)
(z) =
m∑
i=1
˜ξi(z) ·(
∇∂iη)
(z).
Consequently, for z = x, the assumption ξ(x) = 0 yields ˜ξi(x) = ξi(x) = 0, thus the
above series of equalities lead to (∇ξη)(x) = 0, completing the proof.
The next result clarifies the exact way(
∇ξη)
(x) depends on ξ and η.
Corollary 6.3.6. The value(
∇ξη)
(x) of ∇ξη at x ∈M depends only on the value
of ξ at x and the values of η on an (arbitrarily small) neighborhood of x. In other
words, if ˜ξ, η are vector fields on M such that ˜ξ(x) = ξ(x) and η|V = η|V , for any
V ∈ Nx, then(
∇ξη)
(x) =(
∇ξη)
(x).
Proof. By Corollary 6.3.4 and Proposition 6.3.5,(
∇ξη)
(x) =(
∇ξη)
(x) =(
∇ξη)
(x).
A consequence of the preceding result is that it makes sense to set
∇ξxη :=(
∇ξη)
(x).
Applying now conditions (C. 1) and (C. 2) of Definition 6.3.1, we see that ∇ξxη
satisfies the analogs of the properties of the ordinary directional derivative (see
Appendix B, Definition B.1.9); hence,
∇ξxη can be interpreted as a directional derivative of η in the direction of ξx.
Concerning the existence of connections, we prove the following.
Theorem 6.3.7. Every (second countable and Hausdorff) smooth manifold M ad-
mits a connection.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 248
248 Riemannian Structures and Connections
Proof. Let (Uα, φα), α ∈ I, be a locally finite family of charts in A and ψαi∈I asubordinate smooth partition of unity, as ensured by Theorem 1.5.6. Note that the
indices of I are denoted by lower Greek letters to avoid confusion with the indices
i, j, k, . . . running in the set 1, . . . ,m = dimM.For every α ∈ I and ξ, η ∈ X (M), we consider the local connection, over Uα,
[see also (6.3.2)]
∇αξ η :=
m∑
i=1
ξ(ηi) · ∂i,
where ξ and η in the left-hand side are restricted to Uα (to simplify the subsequent
computations, we omit restrictions). Then we set(
∇ξη)
(x) :=∑
α∈I
ψα(x) ·(
∇αξ η
)
(x), x ∈M.
It is immediately verified that ∇ξη ∈ X (M), for every ξ, η ∈ X (M), and ∇ is an
R-bilinear map. Moreover, for any ξ, η ∈ X (M) and f ∈ C∞(M,R),
∇fξη =∑
α∈I
ψα · ∇αfξη =
∑
α∈I
ψα ·(
f ∇αξ η
)
= f∑
α∈I
ψα · ∇αξ η = f ∇ξη,
whereas
∇ξ(fη) =∑
α∈I
ψα · ∇αξ (fη)
=∑
α∈I
ψα ·(
f ∇αξ η + ξ(f)η
)
= f∑
α∈I
ψi · ∇αξ η +
(
∑
α∈I
ψα
)
· ξ(f)η
= f ∇ξη + ξ(f)η.
To describe a connection locally, we need the next result:
Lemma 6.3.8. Let ∇ be a connection an a manifold M . If A is any open subset
of M , then ∇ induces on A a (local) connection ∇A : X (A) × X (A) → X (A) such
that ∇A(
ξ|A, η|A)
= (∇ξη)|A, for every ξ, η ∈ X (M).
∇A, also denoted by ∇|A, is called the restriction of ∇ to A.
Proof. We define ∇A in the following way: Let any X,Y ∈ X (A) and x ∈ A. By
means of a smooth bump function (as in the proofs of Propositions 6.3.3 and 6.3.5),
we extend X and Y to the vector fields ˜X, ˜Y ∈ X (M), such that ˜X = X |V and˜Y = Y |V , where V is a small enough open set, with x ∈ V ⊂ A. Then we set
(
∇AXY
)
(x) ≡ ∇A(X,Y )(x) :=(
∇X˜Y)
(x), x ∈ A.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 249
6.3. Connections 249
In virtue of Corollary 6.3.4,∇A is a well-defined (i.e. independent of the extensions of
X and Y ) connection on A. Now, arbitrary vector fields ξ, η ∈ X (M) are extensions
of ξ|A and η|A, respectively; thus ∇A satisfies the equality of the statement.
Consider now a connection ∇ defined on the domain of a coordinate chart
(U ;x1, . . . , xm) of an m-dimensional manifold M . As in Example 6.3.2 (A),
∂i1≤i≤m is the canonical basis of X (U). Since ∇∂i∂j ∈ X (U), there exist m3
smooth functions
(6.3.3) Γkij : U −→ R; k = 1, . . . ,m,
such that
(6.3.4) ∇∂i∂j =
m∑
k=1
Γkij ∂k; i, j, k = 1, . . . ,m.
The functions Γkij are called the Christoffel symbols of ∇ with respect to U .
Other terms, also in use, are: Christoffel functions or coefficients of ∇.Let any ξ, η ∈ X (U). Taking into account equalities
ξ =m∑
i=1
ξi∂i and η =m∑
j=1
ηj∂j ,
along with conditions (C. 1) and (C. 2) of Definition 6.3.1, we obtain:
∇ξη = ∇ξ
m∑
j=1
ηj∂j
=m∑
j=1
∇ξ ηj∂j
=m∑
j=1
(
ξ(ηj) · ∂j + ηj∇ξ∂j)
=
m∑
j=1
ξ(ηj) · ∂j +m∑
j=1
ηj∇(∑m
i=1ξi∂i)∂j
=
m∑
j=1
ξ(ηj) · ∂j +m∑
i,j=1
ξiηj∇∂i∂j
=
m∑
k=1
ξ(ηk) · ∂k +m∑
i,j=1
ξiηj∑
k
Γkij∂k.
As a result, a connection ∇ on (U, φ) is expressed by means of the Christoffel
symbols by
(6.3.5) ∇ξη =
m∑
k=1
ξ(ηk) +
m∑
i,j=1
ξiηjΓkij
∂k.
The same formula holds for the restriction ∇U ≡ ∇|U of any connection ∇ of M to
the domain of a chart (U, φ).

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 250
250 Riemannian Structures and Connections
Conversely, any family of m3 smooth functions Γkij : U −→ R (i, j, k = 1, . . . ,m)
determines a connection on U by (6.3.5). Indeed, if ξ, η, ζ ∈ X (U) and f, g ∈C∞(U,R), then
∇fξ+gηζ =
m∑
k=1
(
(fξ + gη)(ζk) +
m∑
i,j=1
(
fξi + gηi)
ζkΓkij
)
∂k
= f
m∑
k=1
(
ξ(ζk) +
m∑
i,j=1
ξiζjΓkij
)
∂k
+ g
m∑
k=1
(
η(ζk) +
m∑
i,j=1
ηiζjΓkij
)
∂k
= f ∇ξζ + g∇ηζ,
thus ∇ is C∞(U,R)-linear with respect to the first variable. On the other hand, forξ, η, ζ as before and λ, µ ∈ R,
∇ξ(λη + µζ) =
m∑
k=1
(
ξ(
ληk + µζk)
+
m∑
i,j=1
ξi(
ληj + µζj)
Γkij
)
∂k
= λ∑
k=1
(
ξ(ηk) +m∑
i,j=1
ξiηjΓkij
)
∂k
+ µm∑
k=1
(
ξ(ζk) +m∑
i,j=1
ξiζjΓkij
)
∂k
= λ∇ξη + µ∇ξζ;
hence, ∇ is R-linear with respect to the second variable. Finally,
∇ξ(fη) =
m∑
k=1
(
ξ(fηk) +
m∑
i,j=1
ξi · fηjΓki,j
)
∂k
=
m∑
k=1
(
ξ(f) · ηk + fξ(ηk) +
m∑
i,j=1
fξiηjΓki,j
)
∂k
= ξ(f)
m∑
k=1
ηk∂k + f
m∑
k=1
(
ξ(ηk) +
m∑
i,j=1
ξiηjΓkij
)
∂k
= ξ(f) · η + f ∇ξη,
which shows the Leibniz condition of a connection. The previous arguments along
with the obvious R-bilinearity prove the claim.
Summarizing, we state:
Proposition 6.3.9. A connection ∇ over a chart (U, φ) is completely determined
by its Christoffel symbols. As a matter of fact, there is a bijective correspondence
between connections over (U, φ) and families of smooth functions
Γkij : U → R | i, j, k = 1, . . . ,m
.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 251
6.3. Connections 251
Proof. By the discussion preceding the statement, it remains to prove that the
association ∇ → Γkij is an injection. But this is an immediate consequence of
equality (6.3.5).
Proposition 6.3.9 provides yet another example of (a construction of) a local
connection.
Remark 6.3.10. Let A = (Uα, φα) |α ∈ I be the maximal atlas defining thesmooth structure of an m-dimensional manifold M (recall the comments about the
index space I in the proof of Theorem 6.3.7). If ∇ is any connection on M , then, in
virtue of Lemma 6.3.8, we obtain the restriction ∇α := ∇|Uαof ∇, over each Uα.
Let us denote byαΓk
ij : Uα −→ R; α ∈ I,the Christoffel symbols corresponding to ∇α
Naturally, if Uα ∩ Uβ 6= ∅, the Christoffel symbols αΓkij and
βΓkij should be
related to each other on the overlapping. As a matter of fact, if (x1, . . . , xm) are the
local coordinates of (Uα, φα) and (y1, . . . , ym) those of (Uβ, φβ), then
(6.3.6) βΓrpq =
m∑
i,j,k=1
αΓkij
∂xi
∂yp∂xj
∂yq∂yr
∂xk+
m∑
i=1
∂2xk
∂yp∂yq∂yr
∂xk
where p, q, r = 1, . . . ,m. The compatibility condition or transformation of
Christoffel symbols (6.3.6) arises from a careful application of typical differenti-
ations that the reader might like to try (see Exercise 6.3.12 (5). Therefore,
∇ is completely determined by a collection of families of smooth functions
αΓkij : Uα −→ R | i, j, k = 1, . . . ,m
,
for all α ∈ I, satisfying the compatibility condition (6.3.6).
Associated to a connection are the notion of torsion and curvature defined below.
In spite of their importance (especially of the second in the framework of Rieman-
nian geometry), we do not go into details since only the definition of the first will
be needed in the next section. More precisely:
Definitions 6.3.11. The torsion of a connection ∇ on M is the map
T : X (M)×X (M) −→ X (M),
given by
T (ξ, η) := ∇ξη −∇ηξ − [ ξ, η ]; ξ, η ∈ X (M).
On the other hand, if L(X (M)) denotes the C∞(M,R)-module of linear trans-
formations of X (M), then the curvature of ∇ is the map
R : X (M)×X (M) −→ L(X (M))
defined by
R(ξ, η) = ∇ξ∇η −∇η∇ξ −∇[ ξ,η ]; ξ, η ∈ X (M).

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 252
252 Riemannian Structures and Connections
More explicitly, the above formula of R means that, for every ζ ∈ X (M),
R(ξ, η)ζ ≡(
R(ξ, η))
(ζ) = ∇ξ(∇ηζ)−∇η(∇ξζ)−∇[ ξ,η ]ζ.
Other properties of connections and of their torsion and curvature are listed in the
next exercises.
Exercises 6.3.12.
1. Define a direct connection on a Lie group G.
2. The direct connection ∇, determined by a parallelization B = X1, . . . , Xm onan m-dimensional manifold M , is characterized by the property ∇Xi
Xj = 0,
for every i, j = 1, . . . ,m. Is there any analog for the the connection of Exam-
ple 6.3.2 (A)?
3. Find an explicit expression of the symbols Γkij , as opposed to their indirect
definition of (6.3.4).
4. Compute the Christoffel symbols of the connections of Examples 6.3.2, over a
coordinate chart (U ;x1, . . . , xm).
5. Complete the concluding arguments in the proof of Proposition 6.3.9.
6. Verify the compatibility condition (transformation) of the Christoffel symbols
(6.3.6).
7. Prove the following properties of the torsion T :
T (ξ, η) = −T (η, ξ),T (fξ, η) = T (ξ, fη) = fT (ξ, η),
for every ξ, η ∈ X (M) and f ∈ C∞(M,R). Furthermore, prove that T is bilinear
with respect to C∞(M,R).
8. Prove the following properties of the curvature R:
R(ξ, η) = −R(η, ξ),R(fξ, η) = R(ξ, fη) = fR(ξ, η),
R(ξ, η)(fζ) = fR(ξ, η)(ζ),
for every ξ, η, ζ ∈ X (M) and f ∈ C∞(M,R). Also, prove that R is bilinear with
respect to C∞(M,R).
9. A connection is said to be flat if its curvature vanishes identically. Prove that
the connections defined in Examples 6.3.2 are flat.
10. A connection is said to be of symmetric if its torsion vanishes identically. Are
the connections of Examples 6.3.2 symmetric? If not, when does this happen?
11. Let (U ;x1, . . . , xm) be a coordinate chart of an m-dimensional manifold, and
let
∂i =∂
∂ix| i = 1, . . . ,m
be the corresponding basis of local vector fields.
If ∇ is a connection on M , with torsion T and curvature R, we define the

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 253
6.4. Riemannian connections 253
components T kij : U → R and Rl
ijk : → R of T and R, respectively, by
T (∂i, ∂j) =
m∑
i=1
T kij∂k, R(∂i, ∂j)(∂k) =
l∑
i=1
Rlijk∂l.
Express these components in terms of the Christoffel symbols of ∇.[Note. In many books one can find the following formula defining the compo-
nents of the curvature:∑m
i=1Ri
jkl = R(∂k, ∂l)(∂j). This goes back to older days,
long before the definition of∇, when the curvature was treated (as a tensor withspecific properties) by means of the components. Later, with the introduction
of ∇, it turned out that the components Rijkl were related with R by the afore-
mentioned formula. For the sake of convenience, here we use the formula of the
exercise, without loosing the essential features of the components.]
12. Prove that T = 0 if and only if, over each chart, the corresponding Christoffel
symbols satisfy equality Γkij = Γk
ji, for every i, j, k = 1, . . . ,m.
[Note. This explains the terminology symmetric for a zero torsion connection.]
13. If ∇ is a symmetric connection, then the following Bianchi’s identity
R(ξ, η)ζ +R(η, ζ)ξ +R(ζ, ξ)η = 0,
holds for every ξ, η, ζ ∈ X (M).
14. Translate in terms of the components of T and R the first formula of Exercise
7, the first formula of Exercise 8, and the Bianchi’s identity.
15. Prove that the difference of two connections onM is a bilinear map on X (M)×X (M), with respect to C∞(M,R). Then derive that the set of connections on
a manifold M is an affine space with carrier (or modeled on) an appropriate
vector space.
16. Let B = X1, . . . , Xm be a parallelization on a manifold M . Then find a
connection having the characteristic property ∇XiXj = 1/2[Xi, Xj ](i, j =
1, . . . ,m), and show that T ≡ 0. This is known as the torsion free connection
of M relative to P .
17. Let f : M → M ′ be diffeomorphism. If ∇ is a connection on M , prove that f
induces s connection ∇′ on M ′ such that (in the notation of Theorem 3.5.4)
f∗ (∇ξη) = ∇′f∗(ξ)f∗(η); ξ, η ∈ X (M).
6.4 Riemannian connections
The final section of this chapter is dealing with the intertwining of connections
with Riemannian structures, leading to the so-called Riemannian or Levi-Civita
connection. This is a connection of particular importance for the development of
Riemannian geometry.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 254
254 Riemannian Structures and Connections
From § 6.1 we recall the following notation: If (M, g) is a Riemannian manifold,
then for any vector fields ξ, η ∈ X (M), we define the function
g(ξ, η) : M −→ R : x 7→ g(ξ, η)(x) := gx(ξx, ηx).
As a result, the functions gij , defined by (6.1.4), are also given also by
gij = g(
∂i, ∂j)
= g
(
∂
∂xi,∂
∂xj
)
.
Definition 6.4.1. Let (M, g) be a Riemannian manifold. A Riemannian or Levi-
Civita connection is a connection ∇ on M satisfying the following conditions:
T (ξ, η) = 0,(RC. 1)
g(
∇ξη, ζ)
+ g(
η,∇ξζ)
= ξ(
g(η, ζ))
,(RC. 2)
for every ξ, η, ζ ∈ X (M).
Said differently, a Riemannian connection is a zero torsion or symmetric con-
nection [in the terminology of Exercise 6.3.12 (10)], which is compatible with the
Riemannian structure, in the sense of (RC. 2). The latter condition is also referred
to as the Ricci identity.
Theorem 6.4.2. Any Riemannian manifold (M, g) admits a unique Riemannian
connection.
Proof. The existence and uniqueness of the Riemannian connection will be ensured
from the interpretation of (RC. 1) and (RC. 2) in local terms. To this end, we con-
sider an arbitrary chart (U, φ) of M and the induced canonical basis ∂i1≤i≤m
(m = dim(M)) of X (U). Then, by Exercise 6.3.12 (12), Γmij = Γm
ji . Next, applying
(RC. 2) to the basic vector fields, we obtain:
g(
∇∂i∂j , ∂k
)
+ g(
∂j ,∇∂i∂k
)
= ∂i(g(∂j , ∂k)).
Inserting the Christoffel symbols, and taking into account the symmetry of g and ∇,as well as (6.3.4) and the aforementioned expression of gij ’s, the preceding equality
successively implies:
g
(
m∑
l=1
Γlij∂l, ∂k
)
+ g
(
∂j ,
m∑
l=1
Γlik∂l
)
= ∂i(
g(∂j , ∂k))
⇒
m∑
l=1
Γlij g
(
∂l, ∂k)
+
m∑
l=1
Γlik g
(
∂j , ∂l)
= ∂i(
g(∂j , ∂k))
⇒
m∑
l=1
Γlij glk +
∑
l
Γlik gjl = ∂i(gjk) ⇒
m∑
l=1
Γlij glk +
m∑
l=1
Γlik glj = ∂i(gjk),(6.4.1)

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 255
6.4. Riemannian connections 255
and analogously, by a cyclic permutation of i, j, k,m∑
l=1
Γljk gli +
m∑
l=1
Γlji glk = ∂j(gki),(6.4.2)
m∑
l=1
Γlki glj +
m∑
l=1
Γlkj gli = ∂k(gij).(6.4.3)
Adding (6.4.1), (6.4.2) and subtracting (6.4.3), we obtain
(6.4.4)m∑
l=1
Γlij glk =
1
2
(
∂i(gjk) + ∂j(gki) + ∂k(gij))
.
If we fix i, j and vary k ∈ 1, . . . ,m, we obtain an ordinary algebraic system from
which we determine the symbols Γkij , by multiplying with the invertible (nonsingu-
lar) matrix (gij) of g [see Exercise 6.1.5 (1)].
Let us clarify the procedure just described: Denoting, for convenience, the right-
hand side of (6.4.4) by Ak (k ∈ 1, . . . ,m), we obtain the algebraic systemm∑
l=1
Γlij gl1 = A1
m∑
l=1
Γlij gl2 = A2
· · · · · · · · · · · ·m∑
l=1
Γlij glm = Am
or, in matrix notation,
g11 g12 . . . g1mg21 g22 . . . g2m. . . . . . . . . .
gm1 gm2 . . . gmm
Γ1
ij
Γ2
ij
· · ·Γmij
=
A1
A2
· · ·Am
.
Multiplying the preceding by the inverse of (gij), denoted simply by
(gij) =
g11
g12
. . . g1m
g21
g22
. . . g2m
. . . . . . . . . .
gm1gm2
. . . gmm
,
we immediately obtain the equations
Γ1
ij =
m∑
l=1
g1l Al =
1
2
m∑
l=1
g1l
(
∂i(gjl) + ∂j(gli) + ∂l(gij))

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 256
256 Riemannian Structures and Connections
Γ2
ij =
m∑
l=1
g2lAl =
1
2
m∑
l=1
g2l
(
∂i(gjl) + ∂j(gli) + ∂l(gij))
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
Γmij =
m∑
l=1
gmlAl =1
2
m∑
l=1
gml
(
∂i(gjl) + ∂j(gli) + ∂l(gij))
and similarly for every other pair of lower indices (i, j). Therefore, for any i, j, k ∈1, . . . ,m,
(6.4.5) Γkij =
1
2
m∑
l=1
gkl(
∂i(gjl) + ∂j(gli) + ∂l(gij))
The preceding equality shows that
The Christoffel symbols of a Riemannian connection over a chart (U, φ) are
completely determined by the corresponding basic vector fields ∂i and the
Riemannian structure expressed by its matrix (gij), over the same chart.
Equality (6.4.5) essentially proves the assertion of the statement. More precisely:
i) The uniqueness of the Riemannian connection is almost obvious. Indeed, as-
sume that there are two Riemannian connections ∇ and ˜∇ on M . Then the corre-
sponding Christoffel symbols, over the same chart (U, φ), necessarily satisfy (6.4.5),
thus Γkij =
˜Γkij , and similarly for the symbols over every other chart. Since the con-
nections are completely determined by the family of their Christoffel symbols, over
all of the charts of M , it follows that ∇ = ˜∇.ii) The existence of a Riemannian connection is established as follows: Given a
chart (U, φ), we define a (local) connection ∇U on U by taking as its Christoffel
symbols those of (6.4.5) (see also Proposition 6.3.9). This is a symmetric connection
since Γkij = Γk
ij . We verify that ∇U satisfies (RC. 2) by reversing the procedure
leading from (RC. 2) to (6.4.5), as in the first part of the proof. Thus ∇U is a
Riemannian connection on U . From the collection of all these local connections,
obtained when we vary (U, φ) in the maximal atlas of M , we define a (global)
connection ∇ on M by setting(
∇ξη)∣
∣
U:= ∇U
ξ|Uη|U ,
for every ξ, η ∈ X (M). This is indeed a well-defined connection, for if we consider
∇U and ∇V , with U ∩ V 6= ∅, then their restrictions on U ∩ V are two Riemannian
connections on the same manifold, thus they coincide. As a result, ∇U and ∇V
coincide on U ∩ V , and ∇ is well-defined. Finally ∇ is a Riemannian connection
since it is built from such connections.
Exercises 6.4.3.
1. Verify that ∇U (in the uniqueness part of Theorem 6.4.2) satisfies (RC. 2).

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 257
6.4. Riemannian connections 257
2. Let R be the curvature of the Levi-Civita connection ∇ on a Riemannian man-
ifold (M, g). Then prove equality
g(
R(ξ, η)ζ, χ)
+ g(
R(η, ζ)ξ, χ) + g(
R(ζ, ξ)η, χ)
= 0,
for every ξ, η, ζ, χ ∈ X (M).
3. Let Rn be endowed with the standard Riemannian structure g defined in Ex-
ample 6.1.2 (A). Motivated by Example 6.3.2 (A), define the Riemannian (or
Levi-Civita) connection on Rn.
4. Under what condition is the connection of Example 6.3.2 (A) the Riemannian
connection over a chart with the Riemannian structure of Example 6.1.2 (B)?
5. Let f : (M, g) → (M ′, g′) be an isometry between two Riemannian manifolds
[see Exercise 6.2.9 (5)], and let∇ be the Levi-Civita connection ofM . Prove that
the connection ∇′, induced by f as in Exercise 6.3.12 (17), is the Levi-Civita
connection of M ′.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 373
Bibliography
[1] R. Abraham and J.E. Marsden: Foundations of Mechanics, Benjamin, Reading MA,
1978.
[2] R. Abraham, J.E. Marsden and T. Ratiu: Manifolds, Tensor Analysis, and Appli-
caions, Springer-Verlag, New York, 1988.
[3] R. Abraham and J. Robbin: Transversal Mappings and Flows, Benjamin, New York,
1967.
[4] A. Baker: Matrix Groups. An Introduction to Lie Group Theory, Springer, London,
2002.
[5] T.M. Apostol: Mathematical Analysis (2nd edition), Addison-Wesley, Reading MA,
1974.
[6] R.L. Bishop and S.I. Goldberg: Tensor Analysis on Manifolds, Mackmillan, New York,
1968.
[7] W.M. Boothby: An Introduction to Differentiable Manifolds and Riemannian Geom-
etry, Academic Press, New York, 1975.
[8] W.M. Boothby: Review of A. Kosinski’s book “Differential Manifolds” Bull. Amer.
Math. Soc. 30 (1994), pp. 145–149.
[9] N. Bourbaki: Varietes differentielles et analytiques, Hermann, Paris, 1967.
[10] N. Bourbaki: Topologie Generale, Chapters 1–4, Hermann, Paris, 1971. English trans-
lation : General Topology, Chapters 1–4, Springer, Berlin, 1995.
[11] N. Bourbaki: Groupes et algebres de Lie, Chapters 2 and 3, Hermann, Paris, 1972.
English translation : Lie Groups and Lie Algebras, Chapters 1–3, Springer, Berlin,
1998.
[12] F. Brickell and R.S. Clark: Differentiable Manifolds, Van Nostrand Reinhold, London,
1970.
[13] M.P. do Carmo: Riemannian Geometry, Birkhauser, Boston, 1993.
[14] H. Cartan: Formes differentielles, Hermann, Paris, 1967. English translation: Differ-
ential Forms, Dover, New York, 2006.
[15] C.A Charalambides: Enumerative Combinatorics, Chapman & Hall/CRC, New York,
2002.
[16] S.S Chern: From triangles to manifolds, Amar. Math. Montly 86 (1979), pp. 339–349.
[17] S.S. Chern, W.H. Chen and K.S. Lam: Lectures on Differential Geometry, World
Scientific, Singapore, 1999.
[18] L. Conlon: Differentiable Manifolds. A first Course, Birkhauser, Boston, 1993.
373

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 374
374 Book Title
[19] W.D. Curtis and F.R. Miller: Differential Manifoldsand Theoretical Physics, Aca-
demic Press, New York, 1985.
[20] J. Dieudonne: Treatise on Analysis, Vol. III, Academic Press, London, 1972.
[21] S.K. Donaldson and P.B. Kronheimer: The Geometry of Four-Manifolds, Clarendon
Press, New York, 1990.
[22] C.T.J. Dodson and T. Poston: Tensor Geometry. The Geometric Viewpoint and its
Uses, 2nd edition, GTM 130, Springer, Berlin, 1997.
[23] J. Dugundji: Topology, Allyn and Bacon, Boston, 1966.
[24] M. Freedman and F. Quinnn: Topology of 4-Manifolds, Princeton University Press,
Princeton NJ, 1966.
[25] W. Fleming: Functions of Several Variables, Springer, New York, 1966.
[26] P.G Garret: Abstract Algebra, Chapman and Hall/CRC, New York 2007.
[27] D. Gromoll, W. Klingenberg and W. Meyer: Riemannsche Geometrie im Grossen,
Lecture Notes in Mathematics 55, Springer-Verlag, Berlin, 1975.
[28] P.M. Gadea and J. Munoz Masque: Analysis and Algebra on Differential Manifolds:
A Workbook for Students and Teachers (Revised edition), Springer, Heidelberg, 2009.
[29] A. Haefliger and G. Reeb: Varietes (non separees) a une domension et structures
feuilletees du plan, Enseign. Math. 3 (1957), pp. 107–125.
[30] P. Hartman: Ordinary Differential Equations, Wiley, New York, 1964 (second edition
SIAM 1982).
[31] P.J. Higgins: An Introduction to Topological Groups, London Math. Soc. Lecture Note
Series 15, Cambridge University Press, Cambridge, 1979.
[32] M.W. Hirsch: Differential Topology, GTM 33, Springer, New York, 1976.
[33] J.G. Hocking and G.S. Young: Topology, Addison-Wesley, Reading, Massachusetts,
1961.
[34] S.T. Hu: Elements of General Topology, Holden-Day, San Francisco, 1964.
[35] S.T. Hu: Differentiable Manifolds, Holt, Rinehart and Winston, New York, 1969.
[36] W. Hurewicz and H.Wallman: Dimension Theory, Princeton University Press, Prince-
ton N.J, 1948.
[37] C.J. Isham:Modern Differential Geometry for Physicists, World Scientific, Singapore,
1989.
[38] J.L. Kelley: General Topology, GTM 191, Springer, New York. 1999.
[39] M.A. Kervaire: A manifold which does not admit any differentiable structure, Com-
ment. Math. Helv. 34 (1960), pp. 257–270.
[40] M.A. Kervaire and J.W. Milnor: Groups of homotopy spheres: I, Ann. of Math. 77
(1963), pp. 504–537.
[41] S. Kobayashi and K. Nomizu: Foundations of Differential Feometry, Vol. I, Inter-
science Publishers, New York, 1963.
[42] A.A. Kosinski: Differential Manifolds, Academic Press, New York, 1993
[43] Y. Kosmann-Schwarzback: Groups and Symmetries. From Finite Groups to Lie
Groups, Springer, Heidelberg, 2010.
[44] W. Kuhnel: Differential Geometry. Curves-Surface-Manifolds, AMS Student Mathe-
matical Library 16, Providence RI, 2006.
[45] J. Lafontaine: Introduction aux Varietes Differentielles, Presses Universitaires de
Grenoble, 1996.
[46] S. Lang: Fundamentals of Differential Geometry, GTM 191, Springer, New York,

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 375
Bibliography 375
1999.
[47] S. Lang: Real Analysis, Addison-Wesley, New York, 1999.
[48] S. Lang: Algebra, GTM 211, Springer, New York, 2002.
[49] J.M. Lee: Introduction to Smooth Manifolds, GTM 218, 2003. 2nd edition 2013,
Springer, New York.
[50] S. Lefschetz: Differential Equations: Geometric Theory, Dover, New York, 1973.
[51] L.H. Loomis and S. Sternberg: Advanced Calculus, Addison-Wesley, Reading MA,
1968.
[52] J. MacCleary: Geometry from a Differentiable Point of View, Cambridge University
Press, Cambridge, 2004.
[53] J.E. Marsden and A.J. Tromba: Vector Calculus, W. H. Freeman, New York, 1988.
[54] Y. Matsushima: Differentiable Manifolds, Marcel Dekker, New York, 1972.
[55] J.W. Milnor: On manifolds homeomorphic to the 7-sphere, Ann. of Math. 64 (1956),
pp. 399–405.
[56] J.W. Milnor and J.D. Stasheff: Characteristic Classes, Annals of Mathematics Studies
76, Princeton University Press, Princeton NJ, 1974.
[57] J.R. Munkres: Topology, A First Course, Prentice-Hall, New Jersey, 1975.
[58] G.L. Naber: Topology, Geometry and Gauge Fields. Foundations, Springer, New York,
1997.
[59] M. Nakahara: Geometry, Topology and Physics, Adam Hilger, Bristol, 1991.
[60] C. Nash and S. Sen: Topology and Geometry for Physicists, Academic Press, London,
1983.
[61] T. Okubo: Differential Geometry, Marcel Dekker, New York, 1987.
[62] B. O’Neill: Elementary Differential Geometry, Academic Press, New York, 1997.
[63] H. Osborn: Vector Bundles, Vol. I, Academic Press, New York, 1982.
[64] Pham Mau Quan: Introduction a la Geometrie des Varietes Differentiables, Dunod,
Paris, 1969.
[65] W. Rudin: Principles of Mathematical Analysis (3rd edition), McGraw-Hill, Singa-
pore, 1985.
[66] G.F. Simmons: Introduction to Topology and Modern Analysis, McGraw-Hill, Auck-
land, 1963.
[67] E.H. Spanier: Algebraic Topology, McGraw-Hill, New York, 1966.
[68] M. Spivak: A Comprehensive Introduction to Differential Geometry Vols. I–V, Publish
or Perish, Houston, Texas, 1979.
[69] L.W. Tu: An Introductiion to Manifolds (2nd edition), Springer, New York, 2011.
[70] F.W. Warner: Foundations of Differentiable Manifolds and Lie Groups, Springer, New
York, 1983.
[71] C. von Westenholz Differential Forms in Physics, North-Holland, Amsterdam, 1978.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 376

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 377
List of symbols
The list contains the main symbols, with a fixed meaning, together with a brief
description and the page of their first appearance. For the sake of simplicity, we use
the following abbreviations:
s.t. = such that; w.r.t. = with respect to
Chapter 1
S2 the unit sphere in R3 2
S+z the north hemisphere 2
Dz the unit disc 2
(U, φ), a typical chart 4
xi = pri φ coordinate functions of (U, φ) 5
ui the same as pri 5
(U, x1, . . . , xm) a coordinate chart 5
ψ φ−1 transition function of charts (U, φ) and (V, ψ) 6
Ck differentiability of class k 5
A, B atlases 7
Akm(M) set of m-dimensional Ck-atlases on M 7
A B partial order in Akm(M) 8
Ak∼ B Ck-compatible atlases 10
A′k ∈ Akm(M) the maximal atlas of A ∈ Ak
m(M) 8
A′ the maximal atlas of A ∈ A∞m (M) 12
M ≡ (M,A) a (smooth) manifold 11
dim(M) = m the dimension of a manifold M 11
Mm×n(R) the space of m× n real matrices 13
Mn(R) the set of matricesMn×n(R) 13
L(E,F) the space of linear maps between E, F 13
377

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 378
378 List of symbols
S1 the unit circle 16
R3∗
shorthand notation of R3 \ (0, 0, 0) 17
P2(R) the projective plane 17
Pn(R) the n-dimensional projective space 18
Tn the n-dimensional torus 20
Γf the graph of a function f : R2 → R 21
TA the topology induced by A 22
det the determinant map 29
GL(n,R) the general linear group 29
Lis(Rn) the group of linear automorphisms of Rn 29
End(Rn) the space of linear transformations of Rn 29
Ad the adjoint representation of GL(n,R) 29
Cr(M,N) the set of Cr-differentiable maps between themanifolds M , N 34
i : A → M natural inclusion or canonical injection 37
pM : M ×N →M projection (to the 1st factor M) 38
C∞x (M,R) the set of locally smooth functions at x ∈M 40
C∞(M,R) the algebra of smooth maps from M to R 40
Diff(M) group of diffeomorphisms of M 43
Chapter 2
α : J →M curve in M 48
α ∼x β tangent curves 48
TxM tangent space at x 49
u = [(α, x)] tangent vector at x 49
φ : TxM → Rm bijection induced by (U, φ) 49
( ∂
∂xi
∣∣∣x
)the canonical basis of TxM , w.r.t.. (U, φ) 53
d
dt
∣∣∣s
the canonical basis of TsR 53
Txf the differential of f at x 55
f∗,x another symbol for Txf 55
dxf yet another symbol for Txf (see also p. 296) 55
ΦA ΦA : TxA≃
−−→ TxM 58
Φ× Φ: T(x,y)(M ×N)≃
−−→ TxM × TyN 59
Mf = Jxf the Jacobian matrix of f at x 61
α(t) the tangent vector of α at t 63
Nx the set of open neighborhoods of x ∈M 68
fx∼ g equivalent functions at x 68

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 379
List of symbols 379
[f ]x the germ of f at x 68
C∞
x (M) the algebra of (smooth) germs of M at x 68
δ a derivation of C∞x (M) 69
Dx(M) the linear space of all derivations of C∞x (M) 69
δu the derivation of C∞x (M) induced by u ∈ TxM 69
u(f) a simplified form of δu([f ]x 70
∆x the isomorphism TxM → Dx(M) 74
∂f
∂xi
∣∣∣x) simplified form of
( ∂
∂xi
∣∣∣x
)(f) 71
Jφ(x)
(f1,...,fn
x1,...,xm
)other notation of the Jacobian matrix Jxf (seealso p. 61)
72
det(Jxf) ≡∂(f1,...,fn)∂(x1,...,xn)
the Jacobian determinant of Jxf 72
Dx(M) the linear space of all derivations of C∞(M,R)at x 80
δx a derivation of C∞(M,R) at x 80
D : Dx(M)→ Dx(M) the linear isomorphism between the derivationsinvolved 82
TM the tangent bundle of M 82
π : TM →M projection of TM 82
(π−1(U),Φ) the chart of the tangent bundle induced by(U,φ) 82
Chapter 3
ξ : M → TM vector field 91
X (M) the set of smooth vector fields on M 97
ξx equivalent form of ξ(x) 92
Ω ≡ 0 the zero vector field 93
∂
∂xithe basic vector field defined by (U,φ) 93
d
dtthe basic vector field of R 94
ξi coordinates of a vector field 95
ξ(f) the map x 7→ ξ(f)(x) := ξx(f) 94
ξφ principal part of ξ 96
ξ + η , λξ sum and scalar multiplication in X (M) 97
fξ multiplication of ξ by f ∈ C∞(M,R) 97
δξ a derivation of C∞(M,R) induced by ξ 104
D(M) the set of all (operator) derivations ofC∞(M,R) 104
[ξ, η] the Lie bracket of ξ, η 107
X (f) the set of smooth vector fields along f 110

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 380
380 List of symbols
α the field of velocities of a curve α 110
αi := xi α the coordinates a curve α 115
f∗ the map given by f∗(ξ) = Tf ξ f−1 113
Θ the (l0cal) flow J × U → U of a differentialsystem
117
θU : J0 × U0 −→ U the local flow of a vector field 117
J(x) the domain of αx 118
αx the maximal integral curve trough x 118
µs the (right) translation of R by s 119
D(ξ) the domain of the flow of ξ ∈ X (M) 125
θ the flow θ : D(ξ)→M 125
J∗(x0) set of t ∈ J(x0) such that θ is smooth at (t, x0) 126
Dt(ξ) the set x ∈M : (t, x) ∈ D(ξ) 128
Lξ(η) the Lie derivative of η along ξ 134
Chapter 4
γ : G ×G→ G the multiplication/product of a Lie group 145
α : G→ G the inversion map of a Lie group 145
Lg the left translation by g ∈ G 146
Rg the right translation by g ∈ G 146
U · V the set xy |x ∈ U ⊆, y ∈ V ⊆ G 146
gU gU := Lg(U) 146
Ug Ug := Rg(U) 146
U−1 U−1 := x−1 |x ∈ U = α(U) 148
L(G) the set of left invariant vector fields of G 154
g another notation for L(G) 154
R(G) the set of right invariant vector fields of G 154
h the isomorphism g→ TeG 155
ξv the left invariant vector field determined bya vector v ∈ TeG 156
gl(n,R) the Lie algebra of GL(n,R) 158
Ckij the structural constants of a Lie group G 162
Hom(R, G) the set of one-parameter subgroups of G 163
F : g→Hom(R, G) the map assigning to ξ its one-parameter sub-group of G 166
αξ the one-parameter subgroup F(ξ) 166
exp the exponential map exp: g→ G 168
exp the map exp: TeG −→ G (another form ofexponential) 168
(Ne, ν) the normal chart at e ∈ G 172

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 381
List of symbols 381
Ig) the inner automorphism of G 177
Aut(TeG) the group of linear automorphisms of TeG 177
Aut(g) the group of linear automorphisms of g 177
Ad the adjoint representation of G 177
ad the adjoint representation of g 180
δ : M ×G→M an action of G on M 182
ρg = δg : M →M the right translation of M by g ∈ G 182
ξ∗ the Killing vector field corresponding to ξ ∈ g 182
Chapter 5
AX the atlas induced on X ⊂M by (M,A) 191
p1,0 the projection : Rk × 0→ Rk 191
Γα the graph of a curve α : R ⊃ J → Rn 199
Γf the graph of a map f : M → N 200
GL+(n,R) the subgroup of GL(n,R) consisting of matriceswith positive determinant 222
SL(n,R) the special linear group 222
S(n,R) the vector space of n× n symmetric matrices 223
At the transpose of a matrix A 223
O(n) the orthogonal group 223
sl(n,R) the lie algebra of SL(n,R) 225
o(n) the Lie algebra of O(n) 225
SO(n) the special orthogonal group 226
Chapter 6
J (TxM) the set of all inner products of TxM 228
J (M) the set⋃
x∈M J (TxM) 228
g : M → J (M) a Riemannian structure on M 228
Gξ,η : M → R the map with Gξ,η(x) := g(x)(ξ(x), η(x)
)228
gx := g(x) the value of Riemannian structure at x 228
α ∗ β composition of curves 235
γ−1 inverse curve 235
(M, g) a Riemannian manifold 228
gij the function gij(x) = gx(
∂∂xi
∣∣x, ∂∂xj
∣∣x
)232
‖u‖g the norm of u ∈ TxM w.r.t. g 237
Lg(γ) the length of a (piecewise) smooth curve w.r.t.to g 237
Ω(x, y) the set of piecewise smooth curves from x to y 237
Bg(x, r) the r-ball centered at x 239

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 382
382 List of symbols
Tg the topology induced by dg 239
B(0, ε) the closed ball h ∈ Rm : ‖h‖ ≤ ε 239
∇ a connection or covariant derivative
∂i abbreviated form of ∂∂xi
244
∇ξη∣∣A
the restriction of ∇ on open A ⊂M 245
∇ = ∇A the connection induced by ∇ on open A ⊂M 248
Γkij Christoffel symbols 249
T the torsion of a connection 251
R the curvature of a connection 251
g(ξ, η) the function g(ξ, η)(x) := gx(ξx, ηx) 254
Chapter 7
Lp(E1, . . . ,Ep;F) the space of p-multilinear maps 260
Lp(E,F) the above space for Ei = E 260
Ap(E,F) the space of p-antisymmetric maps 260
f ∧ g the wedge product of two linear maps 262
Sp the set of permutations of 1, . . . , p 261
ε(σ) = sgn(σ) = ±1 the signature of a permutation σ 261
h the hat (caret) indicates omission of h 266
(e∗1, . . . , e∗
n) the dual basis of (e1, . . . , en) 266
ui = pri : E→ R the i-th projection (E finite-dimensional) 266
ai1...ip ai1...ip = f(ei1 , . . . , eip
)267
Ωp(A) the set of differential p-forms on an open setA ⊆ R
n 272
dui the differential of ui equal to Dui 275
curl(ξ) the curl of a vector field ξ 281
div(ξ) the divergence of a vector field ξ 282
grad(f) the gradient of f : R3 → R 282
dω the differential of ω 276
[x0, x] the line segment from x0 to x 284
Zp(A) the space of cocycles 290
Bp(A) the space of coboundaries 290
Ap(TxM,R) the space of antisymmetric p-linear formson TxM 292
Ap(M,R) the set of p-linear forms on M 292
πp the projection of Ap(M,R) to M 292
(π−1p (U),Φp) chart of Ap(M,R) 293
T ∗xM the cotangent space of M at x ∈M 295

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 383
List of symbols 383
Ωp(M) the set of differential p-forms on M 295
dxf the map idRn Txf (see also p. 55) 296
df the map M −→ T ∗M with (df)(x) := (df)x ≡dxf
296
df(ξ) the map defined by [df(ξ)](x) = dxf(ξx) 297
ωφ the principal part of ω 298
GpU ≡ GU the map Ωp(U)→ Ωp(φ(U)) 298
ω(ξ1, . . . , ξp) the function x 7→ ωx(ξ1(x), . . . , ξp(x)) 299
dxi | i = 1, . . . , n the natural basis for Ωp(U) 301
ω ∧ θ the wedge product in Ω∗ 301
dU : Ωp(U)→ Ωp+1(U) the exterior differential over U ⊆M 303
d : Ωp(M)→ Ωp(M) exterior differentiation on M 307
**** Insert the symbols for global d, cocycles,
coboundaries and cohomology groups
ξi omitted vector field
f∗ω the pullback of a differential form 313
ΩpL(G) the space of left invariant forms on G 317
ΩpR(G) the space of right invariant forms on G 317
h1 : Ω1L(G)→ (TeG)
∗ the map ω → ωe 319
Lξω the Lie derivative of ω along ξ 322
iξω the interior product or contraction of ω by ξ 328
ξ⌋ω another symbol for the interior product 328
ωi omitted form 329
Appendix A
T topology 337
(X, T ) a topological space 337
P(X) the power set of X 338
B a basis for topology 338
Bx ⊂ Nx a basis of neighborhoods of x 339
(X, d) a metric space 340
Bd(x, r) the open ball centered at x with radius r 340
Bd(x, r) the closed ball centered at x with radius r 341
Sd(x, r) the sphere centered at x with radius r 341
T |Y the relative topology on Y 343
i : Y → X the canonical injection or inclusion 345
BX×Y a basis for the product topology on X × Y 347
TX×Y the product topology on X × Y 347

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 384
384 List of symbols
T× the product topology on∏
i∈I Xi 348
B× a basis for T× 348
∆X the diagonal of X 352
[x] an equivalence class of X 353
X/∼ a quotient set 353
T∼ quotient topology 353
X/∼ ≡ (X/∼, T∼) a quotient space 353
κ : X −→ X/∼ the canonical (natural) projection 353
Γ∼ the graph of an equivalence relation 354
Cx the connected component of x 360
Appendix B
Df(a) the differential (derivative) of f at a 363
ev the evaluation map 365
comp the composition map comp (f, g) := g f 365
∂f
∂xi|a the i-th partial derivative 367
Df the (total) differential of f 369
D2f(a) the second derivative of f at a 369
D2f the second derivative of f 369
Dkf(a) the k-th derivative of f at a 369
∂2fj∂xk∂xi
∣∣∣a
the second partial derivative 370

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 385
Index
adjoint representation, 29algebra of germs of smooth functions, 68antipodal map, 43atlas– Ck, 7– m–dimensional, 7– coarser, 8– differential, 7– maximal, 8, 12– smaller, 8– smooth, 7– topological, 7
atlases– compatible, 10
bump function, 44bundle– tangent, 82– vector, 85
Ck-differential structure, 11Ck-manifold, 11canonical– projections of cartesian product, 38
canonical basis, 53canonical injection, 37canonical topology, 24chain rule– local form in manifolds, 78– part I, 36– part II, 56
change of coordinates, 6chart– at/about, 5– centered at x, 21– coordinate, 5– global, 5– local, 5– m-dimensional, 4
charts– Ck-compatible, 5– smoothly compatible, 6– topologically compatible, 6
components– of a vector field, 95
coordinate domain, 5
coordinate function, 5coordinate functions– of Rm, 5– of a chart, 5– of a vector field, 95
coordinates– of a vector field, 95
curve– parametrized, 48– smooth, 48
curves– equivalent, 48– tangent, 48
derivation– of C∞(M,R) at x, 80
derivation of C∞x (M), 69derivative, see differential, 86determinant, 29diffeomorphic manifolds, 39diffeomorphism, 6, 39differential– of a smooth map, 55– total, 86
dimension of manifold), 11
equivalent– curves, 48
equivalent functions, 68
figure eight, 32free– module, 99
function– locally smooth, 40
general linear group, 29germ of a smooth function, 68graph, 21group– of diffeomorphisms, 43
hemisphere– north, 2
homothetie, 21
implicit function theorem– for manifolds, 65
inclusion, see natural inclusion
385

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 386
386 Index
injection, see canonical injectioninverse function theorem– coordinate version, 72– for manifolds, 57
Jacobian determinant, 72Jacobian matrix, 61, 72
Leibniz condition, 69Leibniz formula, 63Leibniz rule– partial (local)forms, 79
local coordinates, 5local representation, 33– of a vector field, 93
locally finite collection, 45
manifold– 0-dimensional, 13– dimension of, 11– discrete, 13– model of, 11– parallelizable, 99– smooth, 11– topological, 11
map– differentiable, 34– differentiable at a point, 33– differential
– local representation , 33– smooth, 34
model of chart, 5model of manifold, 11module– free, 99
natural inclusion, 37
open set, 22open submanifold, 31
paracompact space, 46parallelization, 99parametrization of surface, 18partial maps, 42partition of unity, 45principal part– of a vector field, 96
projections– canonical of cartesian product, 38
projective– plane, 17– space
– 2-dimensional, 17– n-dimensional, 18
pushforward, 55
refinement– of a covering, 46
refinement of a covering, 46regular surface, 18
Schwarz lemma– in manifolds, 77
section of a vector bundle, 86smooth
– curve, 48– vector field, 97
space– paracompact, 46
stereographic projection– from the north pole, 2– from the south pole, 2
structure– differential, 11– of manifold, 11– ordinary (C∞) of Rn, 13– smooth, 11– standard (C∞) of Rn, 13
submanifold–open, 31
support of a function, 45surface (regular), 18
tangent– curves, 48– map, 86– space, 49– vector, 49
– of curve, 63tangent bundle, 82– base (space) of, 82– projection of, 82– section of, 91– total space of, 82– trivial, 101
tangent map, 55theorem– implicit function for manifolds, 65– inverse function for Manifolds, 57
topology– canonical, 24
torus (n-dimensional), 20total differential, 86transition functions, 6translation– right (in R
m), 21trivialization, 101
unit disc, 2unit sphere, 2
vector bundle, 85– base (space), 85– projection of, 85– total space of, 85
vector field, 91– components of, 95– coordinates of, 95– principal part of, 96– smooth, 97– zero, 93
vector fields– basic, 94
velocity vector, 63

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 387
Answers to Exercises
Chapter 1
1.2.14 (2). Let (U, φ) be an n-dimensional chart. Then φ(U ∩ U) = φ(U) is open
in Rn and φ φ−1 = idφ(U) is smooth.
1.2.14 (3). As the cartesian product of n-copies of the circle, T n is an n-dimensional
smooth manifold.
1.2.14 (11). Let (U, φ) a chart belonging to the maximal atlas A = (Rn, idRn)′.Then, by the compatibility of (U, φ) and (Rn, idRn), the sets φ(U) = φ(U ∩Rn) and
U = idRn(U ∩ Rn) are open subsets of Rn and
φ = φ id−1
Rn : U −→ φ(U), φ−1 = id−1
Rn φ−1 : φ(U) −→ U
are smooth maps. Therefore, (U, φ) ∈ A if and only if U (and necessarily φ(U)) is an
open subset of Rn and φ is a smooth map with a smooth inverse, i.e. φ : U → φ(U)
is a diffeomorphism (in Rn).
1.3.23(2). Apply Corollary 1.3.20.
1.3.23(3). If GL(n,R) was compact, then R∗ = det(GL(n,R)) would be compact
(i.e. closed and bounded), which is absurd.
1.3.23(8). Setting J := (0, 2π), the reader may be convinced that E = γ(J), either
using a program like Mathlab and Mathematica, or by evaluating γ at a number
of points in J such as in the following table. They are quite useful in sketching
a picture and will help us in our discussion. To accommodate the table correctly
within the limits of the page, we write γ(t) = (γ1(t), γ2(t)) and place the coordinates
on separate rows as indicated. Thus, for instance, γ(3π/4) = (−1,√2/2) etc.
t 0 π/4 π/2 3π/4 π 5π/4 3π/2 7π/4 2π
γ1(t) 0 1 0 −1 0 1 0 −1 0
γ2(t) 0√2/2 1
√2/2 0 −
√2/2 −1 −
√2/2 0
The image of the curve starts at a point approaching the origin of R2 without
touching it, then it goes upwards to (1,√2/2), then to (1, 0). Next, continuing
downwards, it reaches (−1,√2/2) , (1,−
√2/2), and, by crossing this time the origin,
387

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 389
Answers to Exercises 389
2.3.13 (7) Applying (2.3.25) we find that:
α(t)(f) = Ttα
(
d
dt
∣
∣
∣
∣
t
)
(f) =d
dt
∣
∣
∣
∣
t
(
(f α)(t))
= (f α)′(t).
Chapter 3
3.1.13 (1) By the discussion of Example 3.1.3 (C), ξ = idRn ξ. This immediately
shows that the map F : X (A)→ C∞(A,R), with F (ξ) := ξ, is a bijection. Moreover,
the linearity of idRnimplies that λξ + µη = λξ + µη, for every ξ, η ∈ X (A) and
λ, µ ∈ R, whence it follows that F is a linear isomorphism.
3.1.13 (2) In virtue of Examples 3.1.8 (C) and ??, the manifolds Rn, A, S1 are
parallelizable, thus their tangent bundles are trivial. We obtain the following trivi-
alizations, respectively:
Φ: TRn → Rn×Rn, with Φ(u) =(
π(u), idRn(u))
=(
x;λ1(x), . . . , λn(x))
, if π(u) =
x and u =∑n
i=1λi(x) ∂
∂x|x, where the functions λi ∈ C∞(Rn,R) are determined by
the parallelization
∂∂x1 , . . .
∂∂xn
induced by the basic vector fields associated with
the global chart (Rn, idRn).
ΦA : TA→ A× Rn, defined analogously, with respect to the global chart (A, idA),
and the parallelization
∂∂x1
∣
∣
A, . . . ∂
∂xn
∣
∣
A
.
Φ1 : TS1 → S1×R2, given by Φ1(u) = (x, λ(x)), if π(u) = x, and u = λ(x)ξx, where
ξ is the vector field of S1 defined in Example ??, and λ ∈ C∞(S1,R).
3.1.13 (3) Let M and N be parallelizable manifolds, with corresponding paral-
lelizations Xi | i = 1, . . . ,m, and Yj | j = 1, . . . , n. One way to check the paral-
lelizability of M × N is to prove that T (M × N) ≡ TM × TN is trivial. In this
respect, we denote by Φ: TM →M ×Rm and Ψ: TN → N×Rn the corresponding
trivializations, and define the map F : TM ×TN : →M ×N ×Rm×Rn by setting
F (u, v) :=(
πM (u), πN (v), pr2(Φ(u)), pr
2(Ψ(v))
)
,
where πM , πN are the respective projections of the tangent bundles involved.
It is a trivial matter to check that F is an injection. It is also a surjection
because, given any elementV =(
x, y, λ1, . . . , λm, µ1, . . . , µn)
∈M ×N ×Rm ×Rn,
we immediately see that the tangent vectors
u :=m∑
i=1
λiXi(x) ∈ TxM and v :=m∑
j=1
λjYj(y) ∈ TyN
yield F (u, v) = V .
On the other hand, the linearity of F |TxM×TyN: TxM ×TyN → Rm×Rn, with
F (u, v) =(
pr2(Φ(u)), pr
2(Ψ(v))
)
, is an obvious consequence of the linearity of both
Φ|TxM: TxM → Rm and Ψ|TyN
: TyN → Rn.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 390
390 Answers to Exercises
Furthermore, F is a diffeomorphism, as a result of the following commutative
diagram
TM × TNF
M ×N × Rm × Rn
M × Rm ×N × Rn
S
Φ×Ψ
where S is an obvious (diffeomorphism of) symmetries.
Finally, the following commutative diagram completes the requirements of a
trivialization, as discussed in Example 3.1.8 (C),
T (M ×N) ≡ TM × TNF
M ×N × Rm × Rn
M ×N
pr1× pr2π
where π ≡ πM × πN .
3.1.13 (4)
By the general rule ξ|U =∑m
i=1ξ(xi) ∂
∂xi, over a chart (U, φ) ≡ (U ;x1, . . . , xm),
where m = dimM [see also equalities (3.1.4)–(3.1.6)], we have:
∂
∂yj=
m∑
i=1
∂
∂yj(xi)
∂
∂xi=
m∑
i=1
∂xi
∂yj∂
∂xi
∂
∂xi=
n∑
j=1
m∂
∂xi(yj)
∂
∂yj=
m∑
i=1
∂yj
∂xi
∂
∂yj.
3.1.13 (5) By assumption,
(1) ξ|U =
m∑
i=1
ξi∂
∂xi=
m∑
j=1
ξj ∂
∂yj.
Also, by Exercise 3.1.13 (4),
m∑
j=1
ξj ∂
∂yj=
m∑
j=1
ξj
(
m∑
i=1
∂xi
∂yj∂
∂xi
)
=
m∑
i=1
m∑
j=1
ξj ∂xi
∂yj
∂
∂xi.
From (1) and the preceding equalities we conclude that ξi =m∑
j=1
ξj ∂xi
∂yj. The second
formula is proved analogously.
3.1.13 (6) We imitate the procedure followed in the converse part of the proof of
Proposition 3.1.10, for arbitrary ξ0 and U .

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 391
Answers to Exercises 391
3.2.5 (1) Let δ, δ′ ∈ D(M) and α ∈ C∞(M,R). We define the operations δ+ δ′ and
α · δ, by setting
(δ + δ′)(f) := δ(f) + δ′(f), (α · δ)(f) := α δ(f),
for every f ∈ C∞(M,R). It is routinely checked that δ+δ′ and α ·δ belong to D(M).
As an example, we show that α · δ satisfies the Leibniz condition. Indeed, for every
f, g ∈ C∞(M,R),
(α · δ)(fg) = α δ(fg) = α(
δ(f)g + fδ(g))
= α(
δ(f)g)
+ α(
fδ(g))
= (α · δ)(f) g + f (α · δ)(g),
as αf = fα in the commutative algebra C∞(M,R).
3.2.5 (2) By the notation of Example 2.3.8 (B) and equality (2.3.12),
∂
∂xi
∣
∣
∣
∣
x
(xj) =∂xj
∂xi
∣
∣
∣
∣
x
=∂xj
∂xi(x) = δij ,
for every x ∈ U . Therefore,∂xj
∂xi= δij .
3.2.5 (3) In virtue of Example 2.3.8 (A), we have that ξ(c)(x) = ξx(c) = 0, for every
x ∈M .
Chapter 4
4.1.11 (3) Direct application (2.2.5).
4.1.11 (4) For every (a, b, c) ∈ G×G×G,
[γ (γ × idG)](a, b, c) = [γ (γ × idG)]((a, b), c) = γ(ab, c) = (ab)c,
[γ (idG×γ)](a, b, c) = [γ (idG×γ)](a, (b, c)) = γ(a, bc) = a(bc).
The commutativity of G yields the result.
4.1.11 (5) Direct consequence of the third equality of Exercise 4.1.11 (2). Further-
more, Re = Le = idG implies that Teα(v) = −Te idG = − idTeG = −v, for every
v ∈ TeG.
4.1.11 (6) Let u ∈ TG be a fixed tangent vector, with π(u) = x (π : TG → G is
the projection). Let any v ∈ TG, with π(v) = y. Then, Example 4.1.10 and (4.1.3)
imply
Lu(v) = u · v := Tγ(u, v) = T(x,y)γ(u, v) = TxRy(u),
because Lx is constant and TyLx = 0.
Similarly, we find that Ru(v) = v · u = TxLy(u).
4.1.11 (7) First observe that, due to the commutativity of G, Lg = Rg, for every
g ∈ G. Thus, for any u ∈ TxG and v ∈ TyG [again by Example 4.1.10 and (4.1.3)],
u · v = T(x,y)γ(u, v) = TxRy(u) + TyLx(v) =
= TxLy(u) + TyRx(v) = T(y,x)γ(v, u) = v · u.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 392
392 Answers to Exercises
4.1.11 (8) For every x, y ∈ G,
α(xy) = (xy)−1 = y−1x−1 = x−1y−1 = α(x)α(y).
4.1.11 (9) G×H is a smooth manifold. The product γ : (G×H)×(G×H)→ G×H
is defined by setting γ(
(a, b), (a′, b′))
:= (a · a′, b · b′), where the dots represent the
multiplications in G and H . This is clearly a smooth map. More formally, this can
be seen by writing γ as
γ =(
γG (pr1, pr3),γH (pr2, pr4))
,
where, obviously, γG and γH are the multiplications of G and H , respectively, and
pri, i = 1, . . . , 4, are the projections of G×H×G×H to the corresponding factors.
Similarly, α(a, b) =(
a−1, b−1)
, or α =(
αGpr1,αHpr2)
, showing the smoothness
of the inverse map.
4.1.11 (10) It is a trivial fact that if G and H are abelian groups, then so is G×H .
By the definition of its multiplication, S1 is an abelian Lie group. Therefore, the
previous remarks, together with the preceding exercise, prove that T n = S1 × S1
(n factors) is an abelian Lie group.
4.1.11 (11) If G is a Lie group as in Definition 4.1.1, then
f(x, y) = xy−1 = γ(
x, y−1)
= γ (x,α(y)) , ∀ (x, y) ∈ G×G;
that is, f = γ (idG×α), whence the smoothness of f .
Conversely, assuming that f is smooth, we first see that the following diagram
is commutative:
G ∋ x(Ce, idG)
(
e, x−1)
∈ G×G
ex−1 = x−1
f
α
which shows that α = f (Ce, idG) is smooth. Obviously, Ce denotes the constant
map Ce(x) = e, for every x ∈ G.
Similarly, γ is smooth because is written as γ = f (idG,α), shown also in the
next diagram:
G×G ∋ (x, y)(idG,α)
(
x, y−1)
∈ G×G
x(
y−1)
−1
= xy
f
γ
4.2.12 (1) Let A be an arbitrary Lie algebra. If A is abelian, then [a, b] = [b, a],
for every a, b ∈ A. But the bracket is antisymmetric, i.e. [b, a] = −[a, b]. Therefore,
[a, b] = 0, for every a, b ∈ A.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 393
Answers to Exercises 393
4.2.12 (2) It is clear that R ≡ (R,+) is an (abelian) group. Any ξ ∈ X (R) has the
form ξ = fd/dx. If, for a fixed s ∈ R, Ls : R→ R denotes the left translation, with
Ls(t) := s + t, an ξ ∈ X (R) belongs to the Lie algebra L(R) if and only if it is
left-invariant; equivalently, ξ(s) = ToLs(ξ(0)), for every s ∈ R. Since
ξ(s) = T0Ls(ξ(0)) = T0Ls
(
f(0)d
dt
∣
∣
∣
∣
0
)
= f(0)T0Ls
(
d
dt
∣
∣
∣
∣
0
)
= f(0)L′s(0)d
dt
∣
∣
∣
∣
Ls(0)
= f(0)d
dt
∣
∣
∣
∣
s
.
Setting f(0) = λ, we see that
ξ ∈ L(R) =⇒ ξ = λd
dt.
Conversely, for an arbitrary λ ∈ R, ξ = λd/dt determines a vector field on R. It is
left-invariant because, for every t ∈ R,
TtLs(ξ(t)) = TtLs
(
λd
dt
∣
∣
∣
∣
s
)
= λTtLs
(
d
dt
∣
∣
∣
∣
s
)
= λd
dt
∣
∣
∣
∣
s+t
= ξ(s+ t) = ξ(
Ls(t))
;
that is, ξ = λd/dt ⇒ ξ ∈ L(R). The previous arguments show that
L(R) ≡ L(R,+) =
λd
dt
∣
∣
∣
∣
λ ∈ R
.
4.2.12 (3) A left translation La : Rn → Rn, for a ∈ Rn, is given by La(h) = a+ h,
for every h ∈ Rn. Then
T0La
(
∂
∂xi
∣
∣
∣
∣
0
)
=
n∑
j=1
[
T0La
(
∂
∂xi
∣
∣
∣
∣
0
)]
(xj) ·
(
∂
∂xj
∣
∣
∣
∣
a
)
=
n∑
j=1
∂
∂xi
∣
∣
∣
∣
0
(
xj La
)
·∂
∂xj
∣
∣
∣
∣
a
.
Since xj La = aj + xj and aj is constant, it follows that
∂
∂xi
∣
∣
∣
∣
0
(
xj La
)
=∂xj
∂xi
∣
∣
∣
∣
0
= δij ;
hence,
T0La
(
∂
∂xi
∣
∣
∣
∣
0
)
=∂
∂xi
∣
∣
∣
∣
a
.(1)
Therefore, ξ ∈ L(Rn) implies that
ξa = T0La(ξ0) = T0La
(
n∑
i=1
ξi0
∂
∂xi
∣
∣
∣
∣
0
)
=
n∑
i=1
ξi0T0La
(
∂
∂xi
∣
∣
∣
∣
0
)
=
n∑
i=1
ξi0
∂
∂xi
∣
∣
∣
∣
a
.

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 394
394 Answers to Exercises
Setting vi = ξi0, we obtain a vector
(
v1, . . . , vn)
∈ Rn such that
(2) ξa =
n∑
i=1
vi∂
∂xi
∣
∣
∣
∣
a
,
for every a ∈ Rn. In conclusion, ξ ∈ L(Rn) implies that ξ is written as in (2).
Conversely, let v =(
v1, . . . , vn)
be any vector in Rn, and define a vector field ξ
by (2). It is clear that ξ is indeed a smooth vector field on Rn. It remain to show
that ξ is left-invariant: For any a, h ∈ Rn,
ξLa(h) = ξa+h =n
∑
i=1
vi∂
∂xi
∣
∣
∣
∣
a+h
=
n∑
i=1
vi T0La+h
(
∂
∂xi
∣
∣
∣
∣
0
)
[ by (1) ]
=n
∑
i=1
vi T0 (La Lh)
(
∂
∂xi
∣
∣
∣
∣
0
)
=
n∑
i=1
vi ThLa
(
T0Lh
(
∂
∂xi
∣
∣
∣
∣
0
))
= ThLa
(
vi∂
∂xi
∣
∣
∣
∣
h
)
= ThLa(ξh);
that is, ξ ∈ L(Rn) ≡ L(Rn,+). Hence, we obtain the correspondence of the exercise.
4.2.12 (4) We define ˜f by setting ˜f := hH Tef h−1
G , as in the next diagram:
TeGTef
TeH
g
hG
˜f
h
hH
where, for convenience, we denote by e the unit of both G and H .
We check that ξ ∈ g and ˜ξ := ˜f(ξ) ∈ h are f -related; that is, the following
diagram is commutative:
TGTf
TH
G
ξ
f H
˜ξ

June 18, 2017 12:1 World Scientific Book - 9.75in x 6.5in dg page 395
Answers to Exercises 395
Indeed, for every g ∈ G, first observe that f Lg = L′f(g)
f , where L′h, h ∈ H ,
denote left translations in H ; hence,
(Tf ξ)(g) = Tgf(
TeLg(ξe))
= Te(f Lg)(ξe)
= Te
(
L′f(g) f)
(ξe) = TeL′
f(g)
(
Tef(ξe))
= TeL′
f(g)
((
hH ˜f h−1
G
)
(ξe))
[ by the first diagram ]
= TeL′
f(g)
(
hH
(
˜ξ)
)
= TeL′
f(g)
(
˜ξe)
= ˜ξ(f(g)) = (˜ξ f)(g),
which, as desired, verifies the commutativity of the second diagram.
Since ˜f is linear, to complete the exercise it remains to show that ˜f preserves
the bracket, i.e. ˜f(
[ ξ, ξ′ ])
=[
˜f(ξ), ˜f(ξ′)]
, for every ξ, ξ′ ∈ g. As a matter of fact,
because ξ and ξ′ are f -related with ˜ξ and ˜ξ′, respectively, then [ ξ, ξ′ ] and[
˜ξ, ˜ξ′]
are also f -related (see Corollary 3.5.3); thus, in particular,
Tef(
[ ξ, ξ′ ]e)
=[
˜ξ, ˜ξ′]
e,
and, consequently,
˜f(
[ ξ, ξ′ ])
= h−1
H
(
Tef(
[ ξ, ξ′ ]e))
= h−1
H
([
˜ξ, ˜ξ′]
e
)
=[
˜ξ, ˜ξ′]
=[
˜f(ξ), ˜f (ξ′)]
.
4.2.12 (5) Property (i) is an immediate consequence of Te idG = idTeG. Next, for
every ξ ∈ g, we have:(
g f)
(ξ) =(
h−1
K Te(g f) hH
)
(ξ)
=(
h−1
K Teg hH h−1
H Tef hG
)
(ξ)
= g(
˜f(ξ))
=(
g ˜f)
(ξ),
whence (ii). Finally, (iii) is a direct consequence of (i) and (ii).
4.2.12 (6) By Exercise 4.1.11 (8), the inversion map α : G→ G is an isomorphism
of Lie groups. It induces the isomorphism of Lie algebras α : g→ g, as a consequence
of Exercises 4.2.12 (4) and (5). By the very construction of α,
α(ξ) =(
h−1
G Teα hG
)
(ξ)
= h−1
G
(
Teα(ξe))
= h−1
G (−ξe) = −ξ;[ by (4.1.4) ]
that is,
(1) α(ξ) = −ξ, ∀ ξ ∈ g.