e EJL R S sum = β General objective: make sense of this ... - Coordinate... · Examples: Half and...
23
1 Garth J. Simpson Department of Chemistry Purdue University Specific Objectives: 1. Review of Jones vectors, matrices, and tensors for describing polarization phenomenologically. 2. Review rotation matrices and vector coordinate transformation (1D, then 3D). 3. Demonstrate two equivalent approaches for rotating a matrix. 4. Tensor rotation: α, β, γ, etc. 5. Molecular frame to ensemble frame and orientational averaging in uniaxial assemblies: 3WM with e = EJLRβ 6. Molecular frame to ensemble frame and orientational averaging in uniaxial assemblies: 4WM with e = EJLRγ sum e EJL R S β = General objective: make sense of this cryptic expression. Garth J. Simpson
Transcript of e EJL R S sum = β General objective: make sense of this ... - Coordinate... · Examples: Half and...

1
Garth J. Simpson
Department of Chemistry Purdue University
Specific Objectives:1. Review of Jones vectors, matrices, and
tensors for describing polarization phenomenologically.
2. Review rotation matrices and vector coordinate transformation (1D, then 3D).
3. Demonstrate two equivalent approaches for rotating a matrix.
4. Tensor rotation: α, β, γ, etc.5. Molecular frame to ensemble frame and
orientational averaging in uniaxial assemblies: 3WM with e = EJLRβ
6. Molecular frame to ensemble frame and orientational averaging in uniaxial assemblies: 4WM with e = EJLRγ
sume EJL R Sβ=
General objective: make sense of this cryptic expression.
Garth J. Simpson

2
1 2 1 2 1 2 1 2
1 2 1 2 1 2 1 2
sump ppp p p pps p s psp s p pss s s
s spp p p sps p s ssp s p ssp s p
e e e e e e e e ee e e e e e e e e
ω ω ω ω ω ω ω ω
ω ω ω ω ω ω ω ω
χ χ χ χχ χ χ χ
+ + + = + + +
A more general and robust approach is to go back a step to the sum-frequency fields, represented as a Jones vector, as a function of the incident fields.
1 2 1 2 1 2 1 2
1 2 1 2 1 2 1 2
0 0 0 00 0 0 0
ppp
pps
pspsum
p pssp p p s s p s s
s sppp p p s s p s s
sps
ssp
sss
e e e e e e e e ee e e e e e e e e
ω ω ω ω ω ω ω ω
ω ω ω ω ω ω ω ω
χχχχχχχχ
= ⋅
sumJe χ= ⋅ E ( ) ( )1 2
1 00 1
T Te eω ω
⊗ ⊗
E =
Garth J. Simpson

3
The broader utility of this Jones tensor representation may not be as obvious without a working familiarity with Jones vectors and matrices.
( )
( )( )
x
x
y
sum sumi kz t ix x i kz t isum
ii kz t iyy
e e ee e
e ee e
ω δω δ
ω δ
− − +− − +
∆− − +
⋅ = = ⋅ ⋅⋅
The normalized unit Jones vector concisely and completely describes the pure polarization state of plane-wave light.
1ˆ
0e =
Horiz:
2 2
1ˆ xi
yx y
ee
e ee e∆
= ⋅+ 0
ˆ1
e =
Vert:
11ˆ2
ei
=
RCP:
11ˆ2
ei
= −
LCP:
Garth J. Simpson

4
ˆ ˆout ine M e= ⋅
All non-depolarizing optical elements can be described by polarization transfer matrices.
Examples: Half and quarter waveplates, mirror, window.
HWP (0o)
QWP (0o)
1 00 1 −
1 00 i
Perfect mirror
Window (single interface)
1 00 1 −
00p
s
rr
Garth J. Simpson

5
V�⃑�𝑣
x
y
x'
y'
φ
( )' cos sin' sin cos
x xR v
y yφ φ
φφ φ
= ⋅ = ⋅ −
HWP (φ)
( ) ( ) ( )( ) ( )
cos sin 1 0 cos sin cos 2 sin 2sin cos 0 1 sin cos sin 2 cos 2
HWPφ φ φ φ φ φ
φφ φ φ φ φ φ
− = ⋅ = − − −
QWP (φ)
( ) ( ) ( )( ) ( )
cos sin 1 0 cos sin cos 2 sin 2sin cos 0 sin cos sin 2 cos 2
iQWP
i iφ φ φ φ φ φ
φφ φ φ φ φ φ
− − = ⋅ = − − −
( ) ( ) ( )1 00 1
HWP R Rφ φ φ
= − −
Garth J. Simpson
BUT – this approach is not easily generalized for rotation of a tensor!
Passive rotation. is fixed; coordinate systems is rotated relative to it.
�⃑�𝑣

7
V�⃑�𝑣
x
y
x'
y'
φ
( ) ( )'M R R Mφ φ= ⊗ ⋅
''cos sin cos sin'sin cos sin cos'
xx xx
xy xy
yx yx
yy yy
M MM MM MM M
φ φ φ φφ φ φ φ
− − = ⊗ ⋅
'cos cos cos sin sin cos sin sin'cos sin cos cos sin sin sin cos'sin cos sin sin cos cos cos sin'sin sin sin cos cos sin cos cos
xx xx
xy xy
yx yx
yy yy
M MM MM MM M
φ φ φ φ φ φ φ φφ φ φ φ φ φ φ φφ φ φ φ φ φ φ φφ φ φ φ φ φ φ φ
− − − − = ⋅ − −
However, the same net result is also obtained by rotating the vectorized matrix:
Garth J. Simpson
THIS approach is directly generalizable for rotation of a tensor!
Active rotation. Object is rotated in a fixed reference frame.

8
V( ) ( ) 'M R R Mφ φ= ⊗ ⋅
cos cos cos sin sin cos sin sin 1cos sin cos cos sin sin sin cos 0sin cos sin sin cos cos cos sin 0sin sin sin cos cos sin cos cos 1
xx
xy
yx
yy
MMMM
φ φ φ φ φ φ φ φφ φ φ φ φ φ φ φφ φ φ φ φ φ φ φφ φ φ φ φ φ φ φ
− − − − = ⋅ − − −
Worked example for a rotated HWP:
Garth J. Simpson
THIS approach is directly generalizable for rotation of a tensor!
2 2
2 2
cos 2cos sinsin 22sin cossin 22sin coscos 2sin cos
xx
xy
yx
yy
MMMM
φφ φφφ φφφ φφφ φ
− = = −−
cos 2 sin 2sin 2 cos 2
Mφ φφ φ
= −
Same result obtained by reference frame rotation!

9
By analogy, we can describe the NLO properties of the sample in terms of a Jones tensor, which is a direct higher-order extension of the basic framework of Jones matrices.
( ) ( ) ( )
new oldHHH XXX
HHV XXY
HVH XYX
HVV XYY
VHH YXX
VHV YXY
VVH YYX
VVV YYY
R R R
χ χχ χχ χχ χ
φ φ φχ χχ χχ χχ χ
= ⊗ ⊗ ⋅
If the sample is rotated about Z (direction of beam propagation), the corresponding Jones tensor is easily recovered from the rotation matrix products.
This situation arises routinely in microscopy measurements, when the local-frame (X,Y) coordinates are rotated relative to the horizontal Hand vertical V axes of the image.
sumJe χ= ⋅ E ( )
cos sinsin cos
Rφ φ
φφ φ
− =
Garth J. Simpson

The preceding Jones framework enables model-independent measurements, but is limited only to rotation in 1D about the (s,p), (x,y), (h,v) frames. To describe NLO microscopy measurements of tilted and/or twisted systems as well as surface SFG and CARS measurements, a more general rotation matrix is required.
11
' ' '
' ' '
' ' '
'Xx Xy Xz
Yx Yy Yz
Zx Zy Zz
R R Rv R R R v
R R R
= ⋅
'
'
'
'
'
'
'
'
'
sin sin cos cos coscos sin cos sin cos
sin cossin cos cos cos sincos cos cos sin sinsin sin
sin cossin sincos
Xx
Xy
Xz
Yx
Yy
Yz
Zx
Zy
Zz
RRRRRRRRR
ψ φ θ ψ φψ φ θ ψ φ
θ φψ φ θ ψ φψ φ θ ψ φ
θ φθ ψ
θ ψ
θ
= − += − −
== += −
== −=
=
Garth J. Simpson

12Garth J. Simpson
-There are twelve unique definitions of the Euler angles, depending on the selection and ordering of axes of rotation (boo!).-Two common conventions are found in nonlinear optics: ZXZ and ZYZ (yay, sort of!).-Each of the two is interpreted differently for intrinsic (passive) rotation or extrinsic (active) rotation (boo!).
Extrinsic ZYZ Rotation
cos sin 0 cos 0 sin cos sin 0sin cos 0 0 1 0 sin cos 0
0 0 1 sin 0 cos 0 0 1Rθψφ
φ φ θ θ ψ ψφ φ ψ ψ
θ θ
− − = −
Rotation about Z
Rotation about Y
Rotation about Z
Intrinsic ZY'Z' Rotation
Rotation about Z'
Rotation about Y'
Rotation about Z
cos sin 0 cos 0 sin cos sin 0sin cos 0 0 1 0 sin cos 00 0 1 sin 0 cos 0 0 1
Rθψφ
ψ ψ θ θ φ φψ ψ φ φ
θ θ
− = − ⋅ ⋅ −
Unless explicitly stated otherwise, ALL Euler angles presented herein will refer exclusively to external rotations in the ZYZ convention!

13Garth J. Simpson
Intrinsic and extrinsic rotations are inverse operations.
( ) ( )R , , R , ,ex in Iθ ψ φ θ ψ φ⋅ =
Revisiting an example we’ve used but not explained in detail:
cos sin 1 0 cos sin cos 2 sin 2sin cos 0 1 sin cos sin 2 cos 2
φ φ φ φ φ φφ φ φ φ φ φ
− ⋅ = − − −
1 cos 2cos sin cos sin 0 sin 2sin cos sin cos 0 sin 2
1 cos 2
φφ φ φ φ φφ φ φ φ φ
φ
− − ⊗ ⋅ = − −
Combination of intrinsic rotation and inverse (extrinsic)
rotation
Extrinsic projection only
Signs invert for the two rotation matrices in the sandwich approach.
Identical extrinsic rotation matrices are used in the vectorized approach.

14Garth J. Simpson
There is no limit to the order of tensors that can be rotated by vectorization and projection.
( ) ( ), , , , 'M R R Mθ ψ φ θ ψ φ= ⊗ ⋅
( ), , 'v R vθ ψ φ= ⋅ tensor of rank 1 (vector)
tensor of rank 2 (matrix)
( ) ( ) ( ), , , , , , 'R R Rβ θ ψ φ θ ψ φ θ ψ φ β= ⊗ ⊗ ⋅
tensor of rank 3 Describing second order NLO(SFG, SHG, DFG)
( ) ( ) ( ) ( ), , , , , , , , 'R R R Rγ θ ψ φ θ ψ φ θ ψ φ θ ψ φ γ= ⊗ ⊗ ⊗ ⋅ tensor of rank 4 Describing third order NLO(CARS, THG, transient absorption, etc.)
etc.

15
V
H
vh v
h
If the focal plane cuts right across the center of a cell, each bilayer interface is perpendicular to the FoV, and related through rotation about φ.
We could use the known value of φat each location at the cell surface to recover a single representative value of the Jones tensor from the collective set of bilayer measurements.
Conversely, we could use an independently determined Jones tensor to assess the local orientation of the cell membrane.
Garth J. Simpson

16
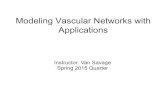
We will look more closely at collagen when we cover the NLO properties of proteins. For now, we will assume a thin collagen fiber has C∞symmetry and that the tilt into and out of the image plane is negligible, such that only azimuthal rotation is important.
If the long collagen fiber axis is defined as the local x-axis, the collagen tensor for SFG or SHG is described by the unique nonzero elements βxxx, βyyx, βxyy, and βzxy
2 2 3
(2), 3 2 2 2
(2),
2 3 2(2),
(2) 2 3 2, 0
(2)3,
(2),
0 2 sin cos sin cos cos
0 sin sin cos sin cos sin cos
0 2 sin cos cos sin cos
0 2 sin cos sin sin cos
0 sin s
J HHH
J HHV
J HVV b
J VHH
J VVH
J VVV L
N
φ φ φ φ φχ
φ φ φ φ φ φ φχ
φ φ φ φ φχχ ε φ φ φ φ φχ φχ
− −
−
= −
−
(2)
(2)
(2)
(2)2 2 2
2 2 3
in cos sin cos sin cos
0 2 sin cos sin cos sin
zxy
yyx
xyy
xxx l
ββββφ φ φ φ φ φ
φ φ φ φ φ
⋅ −
Garth J. Simpson

17
ωvis
ωir ωSFG
ωSFG
p s
p
s
ps
X
ZY
The rotation has no component in φ or ψ for a uniaxial surface, but does have rotation from θ. Since we will also later be using θ to describe molecular tilt, we will include an ω superscript on all of these to help differentiate. Please note the convention for the definition of θ relative to the surface normal!
P,X ZS,YVs.
cos 0 sin0 1 0
vis
vis vis vis Xp
Ys
Z
ee
ee
e
ωω ω ωθ θ
=
cos 0 sin0 1 0
ir
ir ir ir Xp
Ys
Z
ee
ee
e
ωω ω ωθ θ
=
cos 0 sin0 1 0
sum
sum sum sum Xp
Ys
Z
ee
ee
e
ωω ω ωθ θ
± =
Note: the ± symbol on the SFG output refers to the sign change in the X-polarized component for reflection detection. Sign will be (+) for trans, (-) for reflection.
Garth J. Simpson

18
ωvis
ωir ωSFG
ωSFG
p s
p
s
ps
X
ZY P,X ZS,Y
vs.
,
cos 0 sin0 1 0
vis
vis vis vis
vis vis vis
Xp
Ys
Z
J C eff
ee
ee
e
e R e
ωω ω ω
ω ω ω
θ θ
= = ⋅
,
cos 0 sin0 1 0
ir
ir ir ir
ir ir ir
Xp
Ys
Z
J C eff
ee
ee
e
e R e
ωω ω ω
ω ω ω
θ θ
= = ⋅
,
cos 0 sin0 1 0
sum
sum sum sum
sum sum sum
Xp
Ys
Z
J C eff
ee
ee
e
e R e
ωω ω ω
ω ω ω
θ θ
± = = ⋅
, ,
,
sum vis ir
sum
J C eff C eff
J C eff
R R R
e
ω ω ω
ω
χ χ χ
χ χ
= ⊗ ⊗ ⋅ = ⋅ = ⋅ = ⋅ ⋅
J
E E J
The collective Kronecker product of R’s defined as J will be an 8 by 27 for 3WM (e.g., SFG/SHG), and a 16 by 81 for 4WM (e.g., CARS, CATS).
Garth J. Simpson

19
,
sN
C C ii
χ β=∑
C sN R R Rχ β= ⊗ ⊗
If each molecular tensor is expressed in the surface coordinate system, the Cartesian tensor is simply given by summation over the all the molecules per unit area (with a number density of Ns).
If we can also assume that each molecule is identical and uncoupled, changing only in its relative orientation, we can re-express this summation as an orientational average, connecting the molecular-frame tensor to the surface Cartesian frame through rotation matrices.
Most commonly, surfaces are assumed to be uniaxial with the surface normal paralleling a C∞ symmetry axis. In this case, a uniform distribution in the azimuthal rotation angle φ can be assumed, simplifying the relationships bridging the molecular and lab frames.
Garth J. Simpson

20
For C∞ surface symmetry, it contains as a subset:
C2(z)
σ(xz) σ(yz)
C4(z)
For C∞v surface symmetry:
X XY YZ Z
→−→ −→
X YY XZ Z
→→−→
X XY YZ Z
→→−→
X XY YZ Z
→−→→
Garth J. Simpson

Garth J. Simpson
We can generalize this approach for describing the nonlinear optical properties of nonlinear optical interactions in uniaxial assemblies by considering the rotation operations explicitly.
C sN R R Rθψφ θψφ θψφχ β= ⊗ ⊗
Using the ZYZ extrinsic definition for the rotation matrices:
C sN R R R R R R R R Rφ θ ψ φ θ ψ φ θ ψχ β = ⋅ ⋅ ⊗ ⋅ ⋅ ⊗ ⋅ ⋅
From the properties of Kronecker products (AB)⊗(CD) = (A⊗C)(B⊗D), the above equation can be rewritten:
( ) ( ) ( )C sN R R R R R R R R Rφ φ φ θ ψ θ ψ θ ψχ β = ⊗ ⊗ ⋅ ⋅ ⊗ ⋅ ⊗ ⋅
Because the distribution in φ is known to be uniform for a uniaxial assembly and therefore separable (i.e., the distribution in φ is independent of θ and ψ), its average can be independently evaluated:
( ) ( ) ( )C sN R R R R R R R R Rφ φ φ θ ψ θ ψ θ ψχ β= ⊗ ⊗ ⋅ ⋅ ⊗ ⋅ ⊗ ⋅
known a priori

22
This orientationally averaged matrix over the uniaxial symmetry can be incorporated as an additional symmetry matrix Q, which is a 27 by 27 matrix that removes and/or combines tensor elements according to the ensemble uniaxial symmetry.
Garth J. Simpson
C sN R R Rθψφ θψφ θψφχ β= ⊗ ⊗
( ) ( ) ( )C sN Q R R R R R Rθ ψ θ ψ θ ψχ β= ⋅ ⋅ ⊗ ⋅ ⊗ ⋅
Q R R Rφ φ φ= ⊗ ⊗
Of the 27 possible nonzero tensor elements, only seven survive in the case of uniaxial symmetry, such that Q is in general a sparse matrix.
Note: Q is not a “fundamental” matrix in the EJL<R>Sβ product chain, as it is implicitly a part of the rotational averaging connecting the molecular to surface frames within <R>. However, its use can simplify the subsequent orientational averages.

23
Since only four nonzero χ(2) tensor elements remain in a uniaxial assembly, we can write out analytical expressions for the products offor all 27 possible molecular tensor elements for uniaxial achiral assemblies.
Garth J. Simpson
( ) ( ) ( )R R R R R R R R Rφ φ φ θ ψ θ ψ θ ψ⊗ ⊗ ⋅ ⋅ ⊗ ⋅ ⊗ ⋅

24
For chiral films, three additional nonzero tensor elements are allowed in uniaxial C∞ ensembles…
Garth J. Simpson

25
1. The polarization-dependence of SFG and CARS are sensitively coupled to molecular orientation.
2. Quantitative assessment of molecular orientation requires care in the mathematics, particularly for the Fresnel factors due to uncertainties in the optical constants.
3. The presence of molecular symmetry can greatly reduce the number of unique, nonzero elements within the molecular tensor.
4. In systems of low symmetry, analytical expressions for orientation analysis can be challenging unless the complexity of the molecular tensor can be reduced through symmetry or an approximation thereof.
sume EJL R Sβ=
Garth J. Simpson
References:-Begue, N. J.; Moad, A. J.; Simpson, G. J. “Nonlinear optical Stokes ellipsometry (NOSE) Part I: Theoretical Framework.” J. Phys. Chem. C. 2009, 113, 10158-65.-Moad, A. J., Moad, C. W.; Perry, J. M.; Wampler, R. D.; Begue, N, J.; Shen, T.; Goeken, G. S.; Heiland, R.; Simpson, G. J. “NLOPredict: Visualization and Data Analysis Software for Nonlinear Optics” J. Computational Chem. 2007, 28, 1996-2002.