Discrete Optimization 2010 Lecture 8 Lagrangian Relaxation ...
32
Lagrangian TSP & 1-Trees P, NP, co-NP Discrete Optimization 2010 Lecture 8 Lagrangian Relaxation / P , NP and co-NP Marc Uetz University of Twente [email protected] Lecture 8: sheet 1 / 32 Marc Uetz Discrete Optimization
Transcript of Discrete Optimization 2010 Lecture 8 Lagrangian Relaxation ...
Lagrangian TSP & 1-Trees P, NP, co-NP
Discrete Optimization 2010Lecture 8
Lagrangian Relaxation / P , NP and co-NP
Marc UetzUniversity of Twente
Lecture 8: sheet 1 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Outline
1 Lagrangian Relaxation
2 TSP and the 1-Tree Relaxation
3 Decision Problems, P, NP, and co-NP
Lecture 8: sheet 2 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
LP and Lagrangian Relaxation
max ctx
s.t. Ax ≤ b (← complicating constraints)
Bx ≤ d (IP)
x integer
Lagrangian relaxation (λ ≥ 0)
L(λ) = maxx ctx − λt(Ax − b)
or L(λ) = λtb + maxx (ct − λtA)x
s.t. Bx ≤ d (LR(λ))
x integer
Idea: penalize violation of constraints instead of enforcing themExercise: L(λ) is an upper bound on optimum IP solution.
Lecture 8: sheet 3 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
LP and Lagrangian Relaxation
Best possible Lagrangian upper bound is Langragian Dual:
LD = minλ≥0L(λ) a
anote: λ is unrestricted in sign if we relax equality constraints Ax = b
LP upper bound:
LP = maxxctx | Ax ≤ b,Bx ≤ d
denote by ILP the optimum solution value of the integer program
Theorem (for maximization problems)
ILP ≤ LD ≤ LP
(i.e., best Lagrangian bound is never worse than the LP relaxation)
Lecture 8: sheet 4 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Proof (of 2nd inequality)
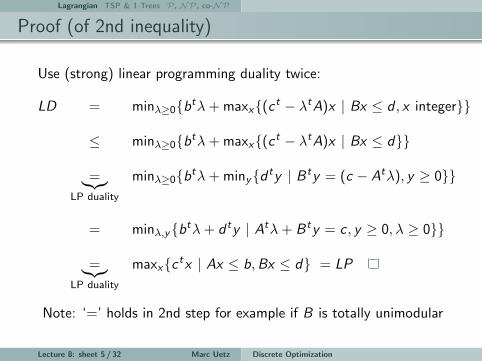
Use (strong) linear programming duality twice:
LD = minλ≥0btλ+ maxx(ct − λtA)x | Bx ≤ d , x integer
≤ minλ≥0btλ+ maxx(ct − λtA)x | Bx ≤ d
=︸︷︷︸LP duality
minλ≥0btλ+ minyd ty | Bty = (c − Atλ), y ≥ 0
= minλ,ybtλ+ d ty | Atλ+ Bty = c , y ≥ 0, λ ≥ 0
=︸︷︷︸LP duality
maxxctx | Ax ≤ b,Bx ≤ d = LP
Note: ‘=’ holds in 2nd step for example if B is totally unimodular
Lecture 8: sheet 5 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
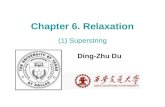
An Example: TSP
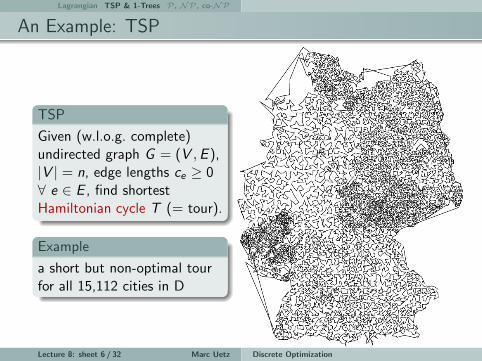
TSP
Given (w.l.o.g. complete)undirected graph G = (V ,E ),|V | = n, edge lengths ce ≥ 0∀ e ∈ E , find shortestHamiltonian cycle T (= tour).
Example
a short but non-optimal tourfor all 15,112 cities in D
Lecture 8: sheet 6 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
IP Formulation for TSP I
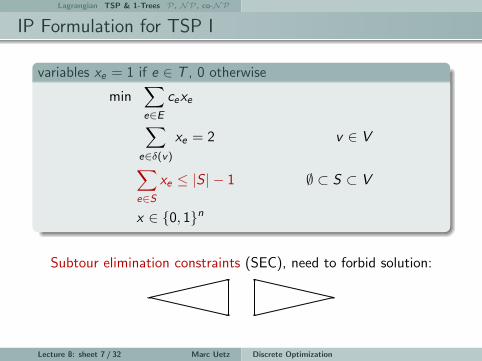
variables xe = 1 if e ∈ T , 0 otherwise
min∑e∈E
cexe∑e∈δ(v)
xe = 2 v ∈ V
∑e∈S
xe ≤ |S | − 1 ∅ ⊂ S ⊂ V
x ∈ 0, 1n
Subtour elimination constraints (SEC), need to forbid solution:
Lecture 8: sheet 7 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
IP Formulation for TSP II
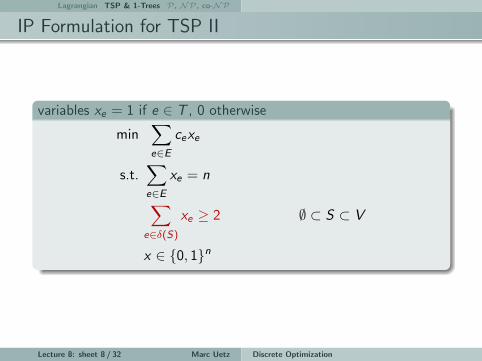
variables xe = 1 if e ∈ T , 0 otherwise
min∑e∈E
cexe
s.t.∑e∈E
xe = n∑e∈δ(S)
xe ≥ 2 ∅ ⊂ S ⊂ V
x ∈ 0, 1n
Lecture 8: sheet 8 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
IP Formulation for TSP III (why valid?)
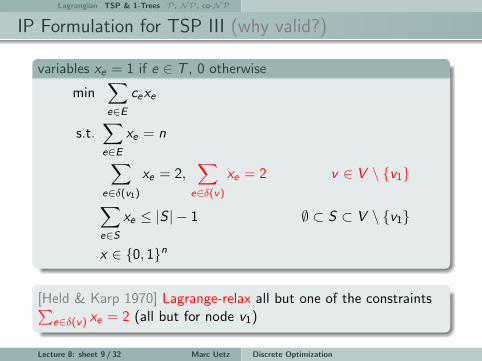
variables xe = 1 if e ∈ T , 0 otherwise
min∑e∈E
cexe
s.t.∑e∈E
xe = n∑e∈δ(v1)
xe = 2,∑
e∈δ(v)
xe = 2 v ∈ V \ v1∑e∈S
xe ≤ |S | − 1 ∅ ⊂ S ⊂ V \ v1
x ∈ 0, 1n
[Held & Karp 1970] Lagrange-relax all but one of the constraints∑e∈δ(v) xe = 2 (all but for node v1)
Lecture 8: sheet 9 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
TSP & One-Tree Relaxation
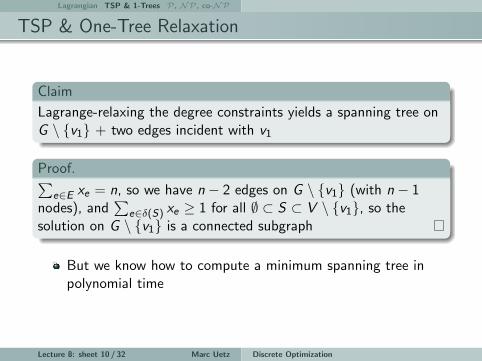
Claim
Lagrange-relaxing the degree constraints yields a spanning tree onG \ v1 + two edges incident with v1
Proof.∑e∈E xe = n, so we have n − 2 edges on G \ v1 (with n − 1
nodes), and∑
e∈δ(S) xe ≥ 1 for all ∅ ⊂ S ⊂ V \ v1, so thesolution on G \ v1 is a connected subgraph
But we know how to compute a minimum spanning tree inpolynomial time
Lecture 8: sheet 10 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
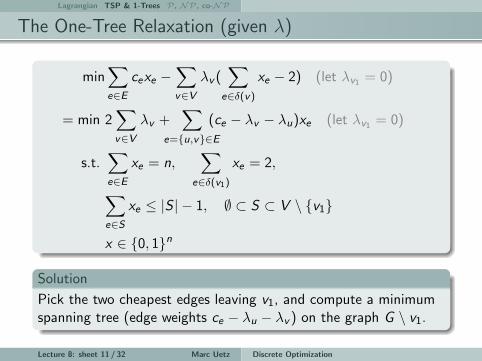
The One-Tree Relaxation (given λ)
min∑e∈E
cexe −∑v∈V
λv (∑
e∈δ(v)
xe − 2) (let λv1 = 0)
= min 2∑v∈V
λv +∑
e=u,v∈E
(ce − λv − λu)xe (let λv1 = 0)
s.t.∑e∈E
xe = n,∑
e∈δ(v1)
xe = 2,
∑e∈S
xe ≤ |S | − 1, ∅ ⊂ S ⊂ V \ v1
x ∈ 0, 1n
Solution
Pick the two cheapest edges leaving v1, and compute a minimumspanning tree (edge weights ce − λu − λv ) on the graph G \ v1.
Lecture 8: sheet 11 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
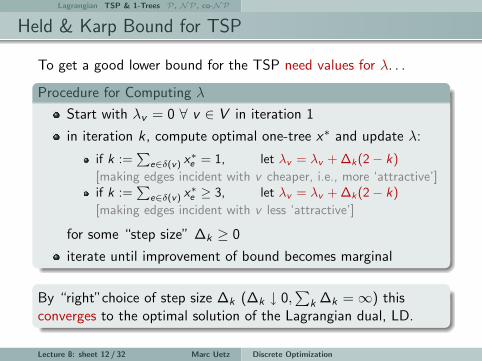
Held & Karp Bound for TSP
To get a good lower bound for the TSP need values for λ. . .
Procedure for Computing λ
Start with λv = 0 ∀ v ∈ V in iteration 1
in iteration k , compute optimal one-tree x∗ and update λ:
if k :=∑
e∈δ(v) x∗e = 1, let λv = λv + ∆k(2− k)
[making edges incident with v cheaper, i.e., more ‘attractive’]if k :=
∑e∈δ(v) x∗e ≥ 3, let λv = λv + ∆k(2− k)
[making edges incident with v less ‘attractive’]
for some “step size” ∆k ≥ 0
iterate until improvement of bound becomes marginal
By “right”choice of step size ∆k (∆k ↓ 0,∑
k ∆k =∞) thisconverges to the optimal solution of the Lagrangian dual, LD.
Lecture 8: sheet 12 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Subgradient Optimization for LD
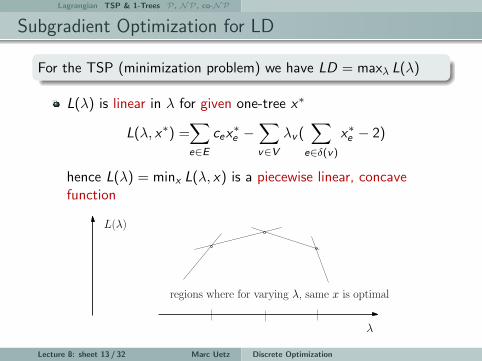
For the TSP (minimization problem) we have LD = maxλ L(λ)
L(λ) is linear in λ for given one-tree x∗
L(λ, x∗) =∑e∈E
cex∗e −
∑v∈V
λv (∑
e∈δ(v)
x∗e − 2)
hence L(λ) = minx L(λ, x) is a piecewise linear, concavefunction
regions where for varying λ, same x is optimal
λ
L(λ)
Lecture 8: sheet 13 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Subgradient Optimization for LD (cont’d)
Now for any given λ and the corresponding optimal one-tree x∗,consider
dv :=dL(λ, x∗)
dλv=
(2−
∑e∈δ(v)
x∗e
)Then dv coincides with our update step for λ, as we defined
λv = λv + ∆k
(2−
∑e∈δ(v)
x∗e
)= λv + ∆kdv
Exercise: vector d = dL(λ,x∗)dλ ∈ Rn is a subgradient of L( · ) at λ,
i.e., L(λ′) ≤ L(λ) + d t(λ′ − λ) ∀λ′ ∈ Rn
Note: Previous “intuitive” update of λs is just a special case ofwhat is known as subgradient optimization
Lecture 8: sheet 14 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
More Generally
Given λ, let x∗ be the optimal solution to a Lagrangian L(λ) with
L(λ) = minx
ctx − λt (Ax − b)
then b − Ax∗ is a subgradient of L( · ) at λ, that is,
L(λ′) ≤ L(λ) + (b − Ax∗)t(λ′ − λ) ∀λ′
Proof: Exercise
Remark: For any L : Rn → R concave, the set
dL(λ) := d ∈ Rn | L(λ′) ≤ L(λ) + d t(λ′ − λ) ∀λ′ is called
subdifferential of L at λ. If L is differentiable at λ, then
dL(λ) = ∇L(λ). If 0 ∈ dL(λ), L attains its minimum in λ
Lecture 8: sheet 15 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Remarks on the Held & Karp bound
Very strong lower bound in practical implementations
Reasonably fast to compute, so feasible within B & B
Gives same lower bound as the LP relaxation, LP = LD[fractional 1-tree relaxation always has integer optimalsolution, follows from a theorem by Edmonds 1971]
There are examples where LD = maxλ L(λ)< IP[to really solve TSP to optimality, can use Lagrangianrelaxation only as a lower bound, e.g. within B & B]
Lecture 8: sheet 16 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
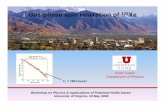
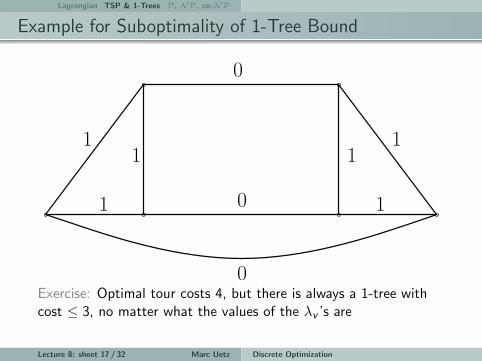
Example for Suboptimality of 1-Tree Bound
1
1
1 1
1
1
0
0
0Exercise: Optimal tour costs 4, but there is always a 1-tree withcost ≤ 3, no matter what the values of the λv ’s are
Lecture 8: sheet 17 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
One-Trees: Trees With a Cycle!
Lecture 8: sheet 18 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Outline
1 Lagrangian Relaxation
2 TSP and the 1-Tree Relaxation
3 Decision Problems, P, NP, and co-NP
Lecture 8: sheet 19 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Decision Problems
Definition
A decision (recognition) problem P is a set of instances I that canbe partitioned into ‘Yes’ and ‘No’ instances IY , IN , such that
I = IY ∪ IN
IY ∩ IN = ∅
Examples
All graphs G = (V ,E ) with edge lengths ce , and k ∈ N.Graphs with TSP tour of length ≤ k, and those without.
All graphs G = (V ,E ), and k ∈ N. Graphs with a matchingM ⊆ E of cardinality ≥ k , and those without.
Lecture 8: sheet 20 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Optimization and Decision Problems
Optimization (OPT)
Given an instance I = (S , f ) of discrete optimization problem P,find a solution s∗ ∈ S minimizing / maximizing f (s).
Decision (DEC)
Given an instance I = (S , f ) of discrete optimization problem P,and integer k , decide if ∃ solution s with f (s) ≤ / ≥ k.
Clearly, if we can solve OPT, we can also solve DEC.
What about the other direction?
Lecture 8: sheet 21 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Decision Problems are often General Enough
Proposition
(For quite many discrete optimization problems) if we can solveDEC in poly-time, we can also solve OPT in poly-time.
There may be cases where OPT is provably more difficult (an openresearch question), but in many cases it isn’t.
How to solve OPT using an algorithm for DEC?
1 First compute optimal solution value ξ for OPT, by binarysearch on possible optimal values
2 Given ξ, construct a corresponding optimal solution
Lecture 8: sheet 22 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Example: Maximum Matching
Given G = (V ,E ), find a matching of maximal cardinality.
Assume algorithm A(k) that correctly tells us:Is there a matching of size ≥ k in a graph G?
1 Binary Search for optimal value ξ (note, ξ ∈ [0,m], integer)
Let [a, b] = [0,m]While (b > a)
k = a + d b−a2e
If A(k) = ‘Yes’ on G , then a = kOtherwise b = k − 1
return ξ := a(= b) O( log m ) × A(k)
2 Finding the solutionFor all edges (e ∈ E )
if A(ξ) = ‘Yes’ on graph (G − e) then delete e from G
return remaining edges E (G ) O( m ) × A(k)
Lecture 8: sheet 23 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Problem class P : Deterministic Polynomial Time
Given: Decision problem P, |I | encoding length of instance I ∈ P
Definition
Algorithm A is a deterministic polynomial time algorithm for P ifthere exists a polynomial p such that,
A(I ) =‘Yes’ ⇔ I is ‘Yes’ instance
tA(I ) ≤ p(|I |) ∀ instances I of P (A is a poly-time algorithm)
Definition
Problem P ∈ P :⇔ P has deterministic poly-time algorithm
Examples: decision problems for MST, ShortestPath, MaxFlow,MinCostFlow, Matching ∈ P
Lecture 8: sheet 24 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
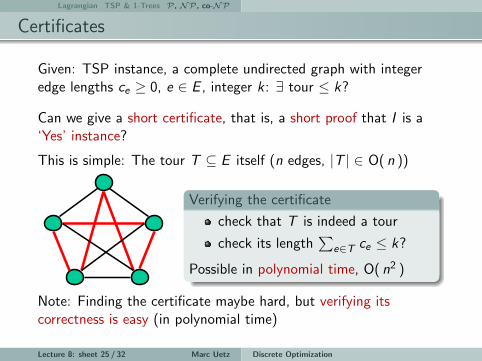
Certificates
Given: TSP instance, a complete undirected graph with integeredge lengths ce ≥ 0, e ∈ E , integer k : ∃ tour ≤ k?
Can we give a short certificate, that is, a short proof that I is a‘Yes’ instance?
This is simple: The tour T ⊆ E itself (n edges, |T | ∈ O( n ))
!"#$%&'(")*(+,$-."
!"#$%&'&()*+ ,$-./%"0".%&"%10'%-$2&!&3&45676896&"%0$/$,&:;&
<'%&=$&/"#$&'&1>.,0&?,..@&&1>.,0&?,..@&&0>'0&"0&"1&'&AB7)C "%10'%-$D
“Easy”: !?,..@2 0.E,&(&"01$F@
!?,..@&#$,"@"-'0".%2
(&"1&"%8$$8&'&0.E,&! 84(9&! :&!
G.0$2&H"%8"%/H"%8"%/ 0>$&?,..@&40>$&0.E,9&I'J&K$&LE"0$&>',86&
KE0&#$,"@"-'0".%#$,"@"-'0".% .@&0>$&?,..@&"1&$'1J&4?.FJ%.I"'F&0"I$9&
Verifying the certificate
check that T is indeed a tour
check its length∑
e∈T ce ≤ k?
Possible in polynomial time, O( n2 )
Note: Finding the certificate maybe hard, but verifying itscorrectness is easy (in polynomial time)
Lecture 8: sheet 25 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Problem class NP : Nondeterministic Polynomial Time
Given: Decision problem P, |I | encoding length of instance I ∈ P
Definition
Algorithm A is nondeterministic polynomial time algorithm for P if
For all ‘Yes’ instances I , ∃ poly-length certificate z(I ) (i.e.,|z(I )| ≤ p(|I |) for some polyn. p), and A(I , z(I )) =‘Yes’
For all ‘No’ instances I , and any poly-length input z (‘fakecertificate’), A(I , z) =‘No’
A(I , z) is a poly-time algorithm for any poly-length z
Definition
P ∈ NP :⇔ P has nondeterministic poly-time algorithm⇔ ‘Yes’ instances of P have a polynomial certificate
that can be verified in polynomial time
Example: We have just argued that TSP∈ NPLecture 8: sheet 26 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Why ‘nondeterministic’?
Definition uses existence of a polynomial length certificate z(I ),but not how to obtain it!
We can interpret this equivalently as:
Consider all possible certificates z of polynomial length,
If the instance I =‘Yes’, at least one yields the algorithm toterminate with ‘Yes’
Could we ‘guess’ the right certificate z(I ) for any given ‘Yes’instance I , we could solve the problem
↑guessing = nondeterminism
Lecture 8: sheet 27 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
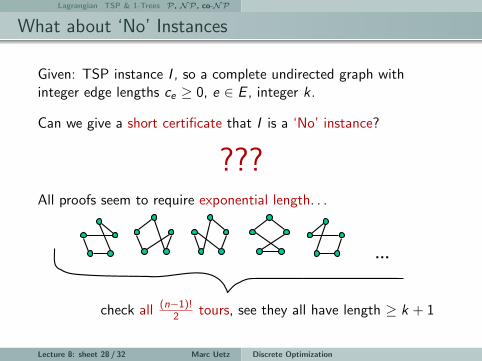
What about ‘No’ Instances
Given: TSP instance I , so a complete undirected graph withinteger edge lengths ce ≥ 0, e ∈ E , integer k .
Can we give a short certificate that I is a ‘No’ instance?
???All proofs seem to require exponential length. . .
!"#$%&'()*+,-.&/ 01&2$+#"
!"#$%&'&()*+ ,$-./%"0".%&"%10'%-$2&!&3&45676896&"%0$/$,&:;&
<'%&=$&/"#$&'&1>.,0&?,..@&&1>.,0&?,..@&&0>'0&"0&"1&'&ABCD "%10'%-$E
?).F$>.=6&'GG&?,..@1&1$$F&0.&,$HI",$&$J?.%$%0"'G&G$%/0>$J?.%$%0"'G&G$%/0>KK
…
LGG&>'#$&G$%/0>&! :MN&check all (n−1)!2 tours, see they all have length ≥ k + 1
Lecture 8: sheet 28 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
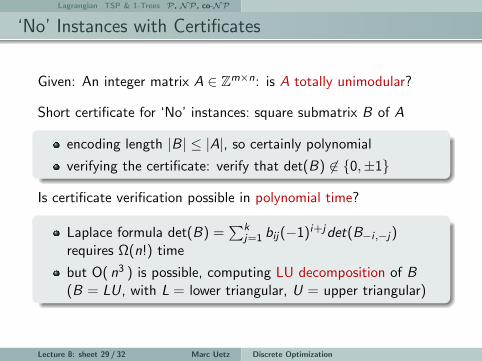
‘No’ Instances with Certificates
Given: An integer matrix A ∈ Zm×n: is A totally unimodular?
Short certificate for ‘No’ instances: square submatrix B of A
encoding length |B| ≤ |A|, so certainly polynomial
verifying the certificate: verify that det(B) 6∈ 0,±1
Is certificate verification possible in polynomial time?
Laplace formula det(B) =∑k
j=1 bij(−1)i+jdet(B−i ,−j)requires Ω(n!) time
but O( n3 ) is possible, computing LU decomposition of B(B = LU, with L = lower triangular, U = upper triangular)
Lecture 8: sheet 29 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
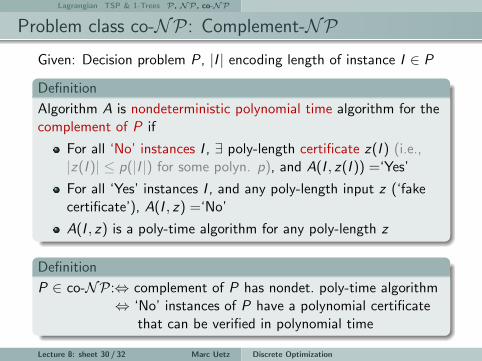
Problem class co-NP : Complement-NPGiven: Decision problem P, |I | encoding length of instance I ∈ P
Definition
Algorithm A is nondeterministic polynomial time algorithm for thecomplement of P if
For all ‘No’ instances I , ∃ poly-length certificate z(I ) (i.e.,|z(I )| ≤ p(|I |) for some polyn. p), and A(I , z(I )) =‘Yes’
For all ‘Yes’ instances I , and any poly-length input z (‘fakecertificate’), A(I , z) =‘No’
A(I , z) is a poly-time algorithm for any poly-length z
Definition
P ∈ co-NP:⇔ complement of P has nondet. poly-time algorithm⇔ ‘No’ instances of P have a polynomial certificate
that can be verified in polynomial time
Lecture 8: sheet 30 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
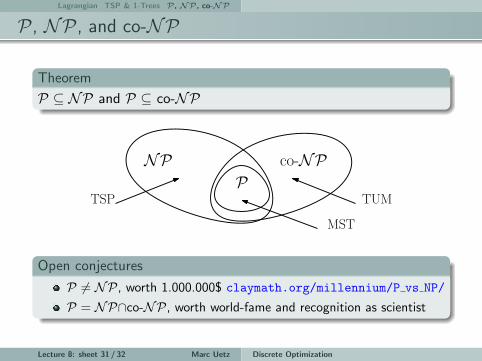
P , NP , and co-NP
Theorem
P ⊆ NP and P ⊆ co-NP
PNP co-NP
TSP TUM
MST
Open conjectures
P 6= NP, worth 1.000.000$ claymath.org/millennium/P vs NP/
P = NP∩co-NP, worth world-fame and recognition as scientist
Lecture 8: sheet 31 / 32 Marc Uetz Discrete Optimization
Lagrangian TSP & 1-Trees P, NP, co-NP
Proof P ⊆ NP ,co-NP
Given Problem Q ∈ P.
To show: Q ∈ NP i.e., for all ‘Yes’ instances I ∈ Q existspolynomial length certificate z(I ), and an algorithm A that verifiesthe certificate in poly-time, so A(I , z(I )) = ‘Yes’⇔ I = ‘Yes’.
Proof: We know Q ∈ P, so Q has a poly-time algorithm AQ withAQ(I ) =‘Yes’ ⇔ I =‘Yes’
Now use z(I ) = ∅, and define A(I , ∅) := AQ(I )
To see P ⊆co-NP, replace all underlined ‘Yes’ by ‘No’, and letA(I , ∅) := ¬AQ(I )
Lecture 8: sheet 32 / 32 Marc Uetz Discrete Optimization