1 Problem: Consider a two class task with ω 1, ω 2 LINEAR CLASSIFIERS.
DINAMIKA
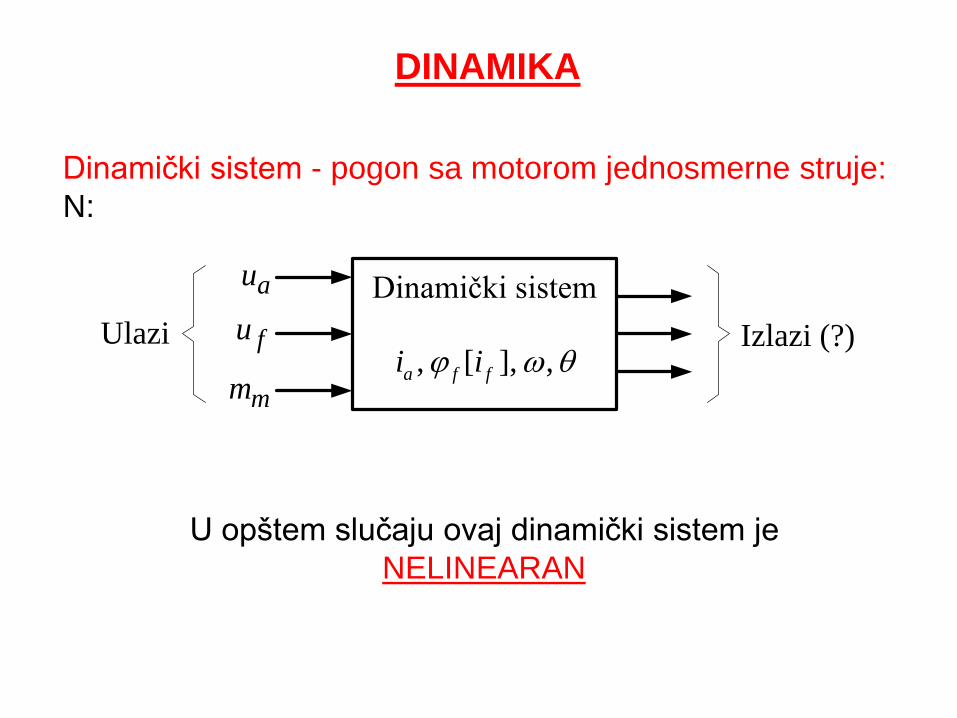
U opštem slučaju ovaj dinamički sistem je NELINEARAN
Dinamički sistem - pogon sa motorom jednosmerne struje: N:
, [ ], ,a f fi iϕ ω θ
au Dinamički sistemfu
mm
Ulazi Izlazi (?)
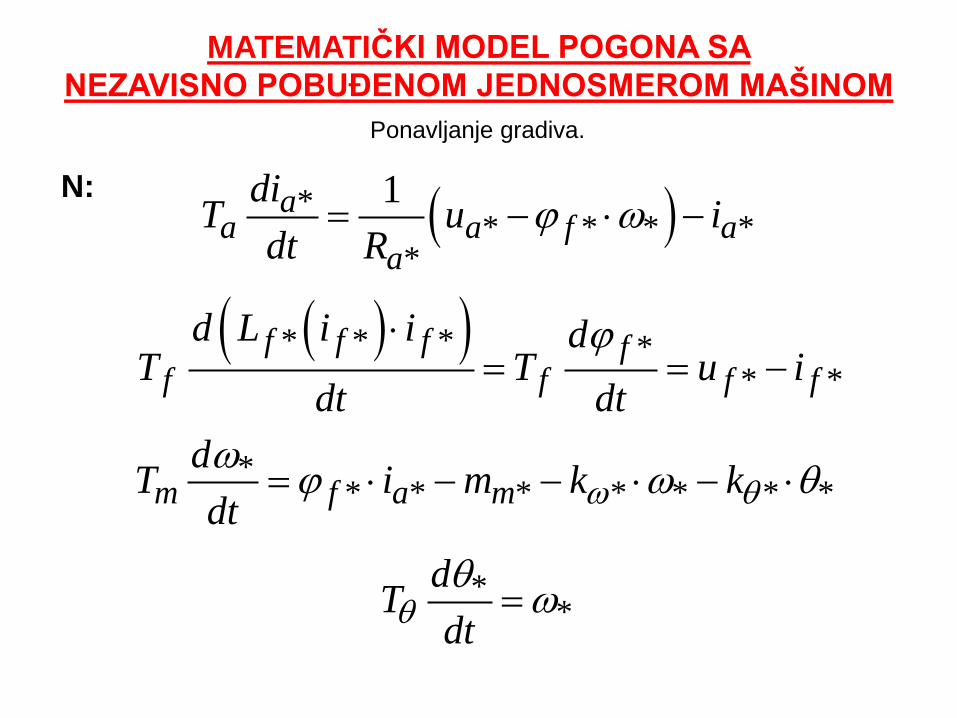
MATEMATIČKI MODEL POGONA SA NEZAVISNO POBUĐENOM JEDNOSMEROM MAŠINOM
Ponavljanje gradiva.
N: ( )** * * *
*
1aa a f a
a
diT u idt R
ϕ ω= − ⋅ −
( )( )* * * ** *
f f f ff f f f
d L i i dT T u i
dt dtϕ⋅
= = −
** * * * * * *m f a m
dT i m k kdt ω θω ϕ ω θ= ⋅ − − ⋅ − ⋅
**
dTdtθθ ω=
+−
1
apT1
mpT
1
fpT
1
aRau
e aiem
mm
ω
1( )ff ϕ−
+ −
+ −fu
fi
fϕ
1pTθ
θ
fϕω
fϕ
+ −
−
kω
+
+kθ
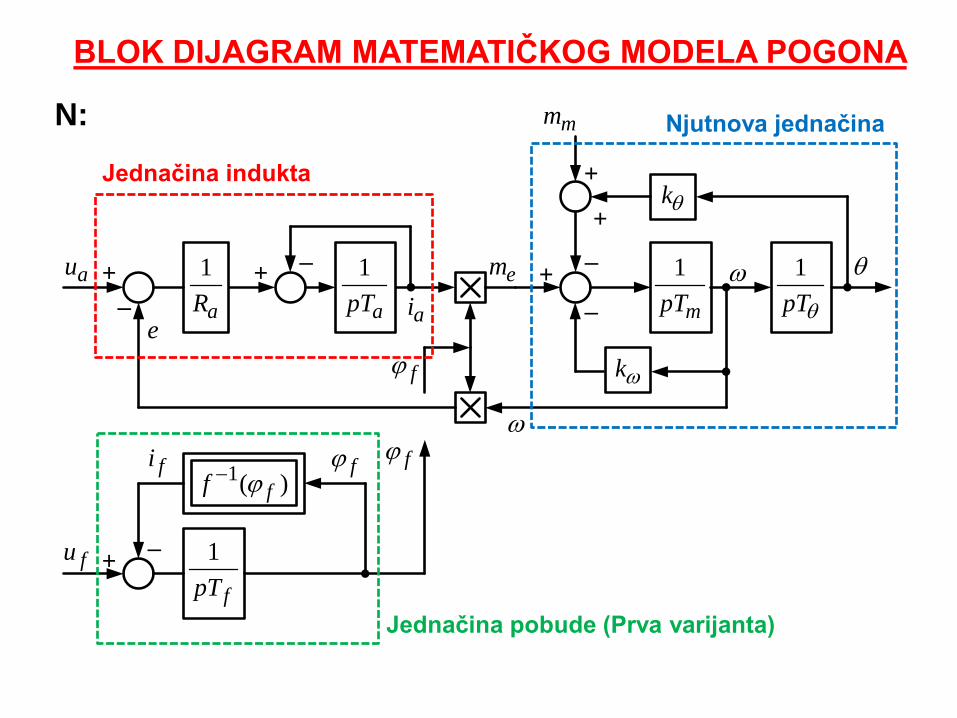
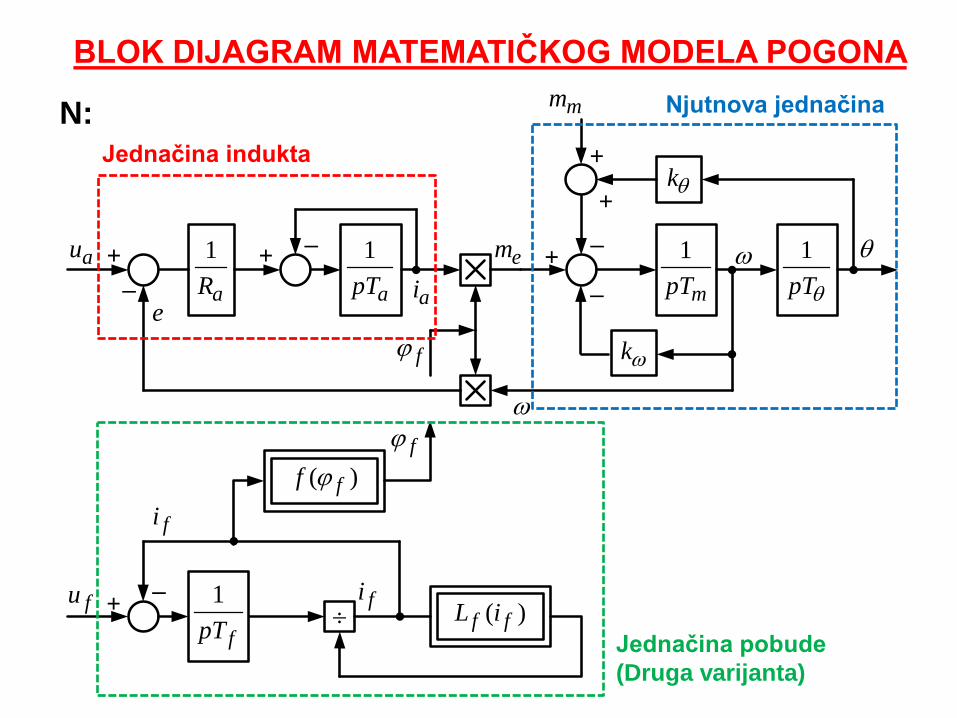
BLOK DIJAGRAM MATEMATIČKOG MODELA POGONA
Jednačina pobude (Prva varijanta)
Jednačina indukta
Njutnova jednačina N:
+−
1
apT1
mpT1
aRau
e aiem
mm
ω+ −
fϕ
1pTθ
θ
ω
1
fpT
( )ff ϕ
+ −fu
fi
fϕ
÷ ( )f fL ifi
+ −
−
kω
+
+kθ
BLOK DIJAGRAM MATEMATIČKOG MODELA POGONA
Jednačina pobude (Druga varijanta)
Jednačina indukta
Njutnova jednačina N:
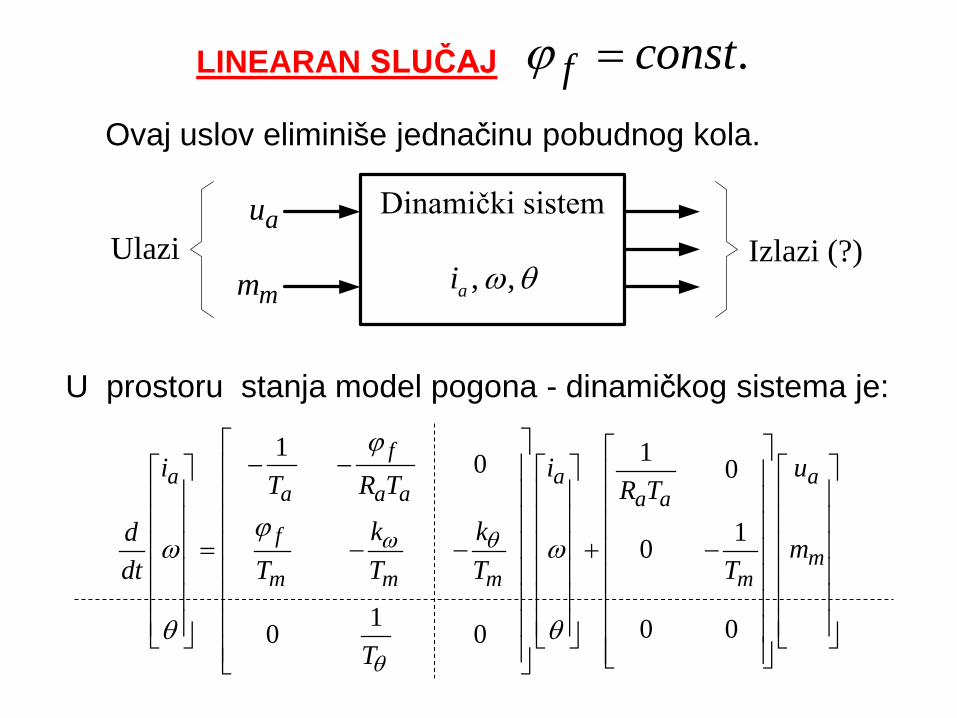
LINEARAN SLUČAJ
Ovaj uslov eliminiše jednačinu pobudnog kola.
U prostoru stanja model pogona - dinamičkog sistema je:
1 10 0
10
1 0 00 0
fa a a
a a a a af
mm m m m
i i uT R T R Tk kd m
dt T T T T
T
ω θ
θ
ϕ
ϕω ω
θ θ
− − = − − + −
.f constϕ =
, ,ai ω θ
au Dinamički sistem
mmIzlazi (?)Ulazi
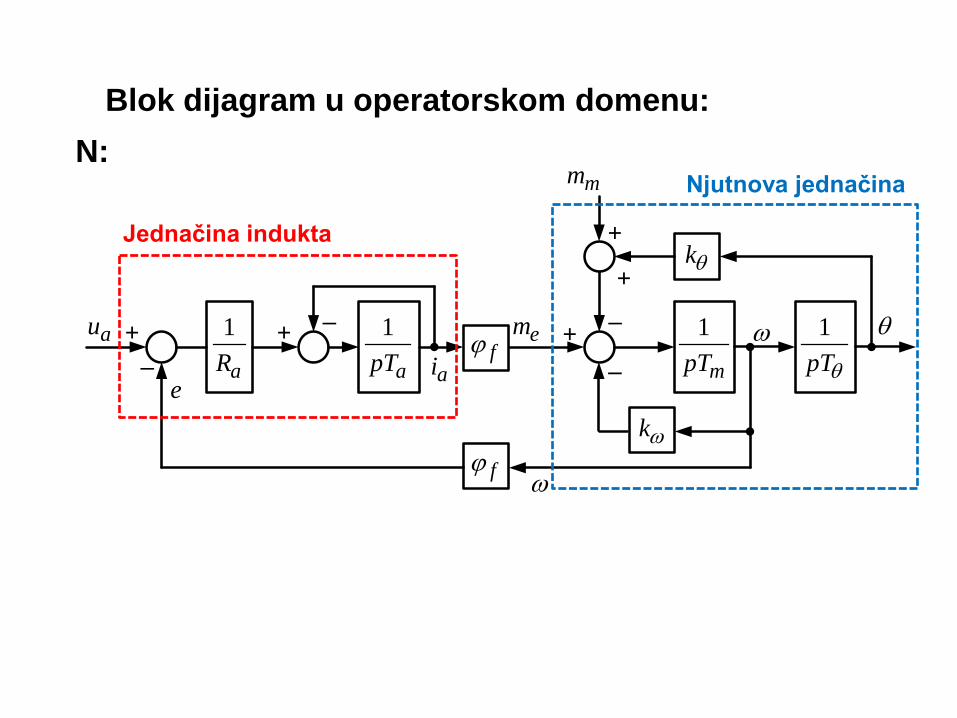
Blok dijagram u operatorskom domenu:
+−
1
apT1
mpT1
aRau
e aiem
mm
ω+ −fϕ
1pTθ
θ
ω
+ −
−
kω
+
+kθ
fϕ
Jednačina indukta
Njutnova jednačina N:
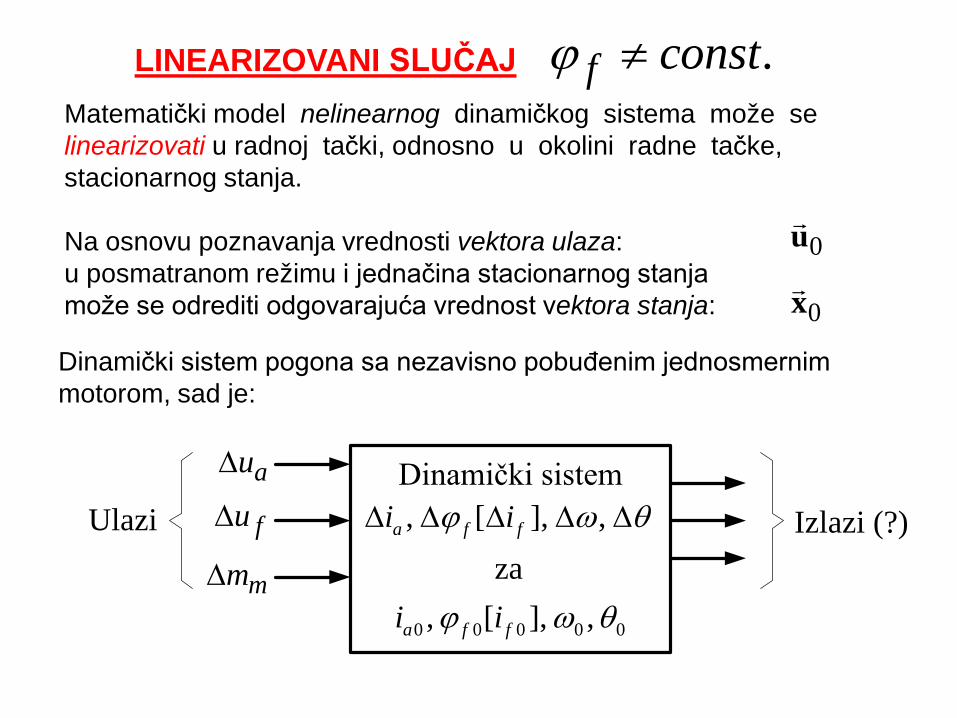
LINEARIZOVANI SLUČAJ Matematički model nelinearnog dinamičkog sistema može se linearizovati u radnoj tački, odnosno u okolini radne tačke, stacionarnog stanja. Na osnovu poznavanja vrednosti vektora ulaza: u posmatranom režimu i jednačina stacionarnog stanja može se odrediti odgovarajuća vrednost vektora stanja:
Dinamički sistem pogona sa nezavisno pobuđenim jednosmernim motorom, sad je:
, [ ], ,a f fi iϕ ω θ∆ ∆ ∆ ∆ ∆au∆ Dinamički sistemfu∆
mm∆
Ulazi Izlazi (?)
0 0 0 0 0, [ ], ,a f fi iϕ ω θza
0u
0x
.f constϕ ≠
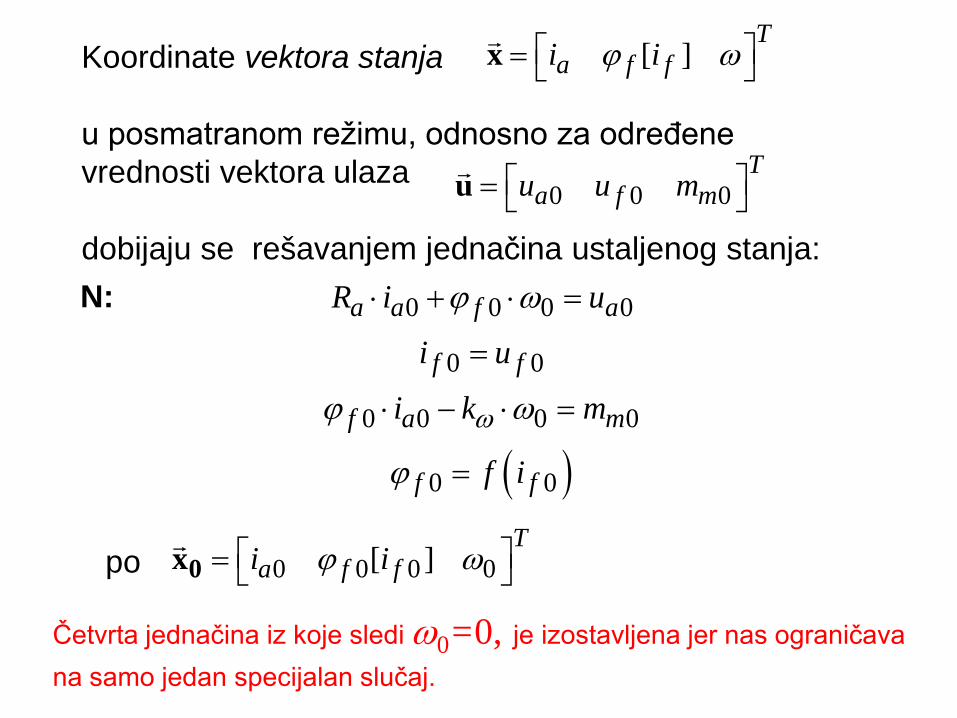
Koordinate vektora stanja u posmatranom režimu, odnosno za određene vrednosti vektora ulaza dobijaju se rešavanjem jednačina ustaljenog stanja:
( )
0 0 0 0
0 0
0 0 0 0
0 0
a a f a
f f
f a m
f f
R i u
i u
i k m
f i
ω
ϕ ω
ϕ ω
ϕ
⋅ + ⋅ =
=
⋅ − ⋅ =
=
po
Četvrta jednačina iz koje sledi ω0=0, je izostavljena jer nas ograničava na samo jedan specijalan slučaj.
[ ]T
a f fi iϕ ω = x
0 0 0T
a f mu u m = u
0 0 0 0[ ]T
a f fi iϕ ω = 0x
N:
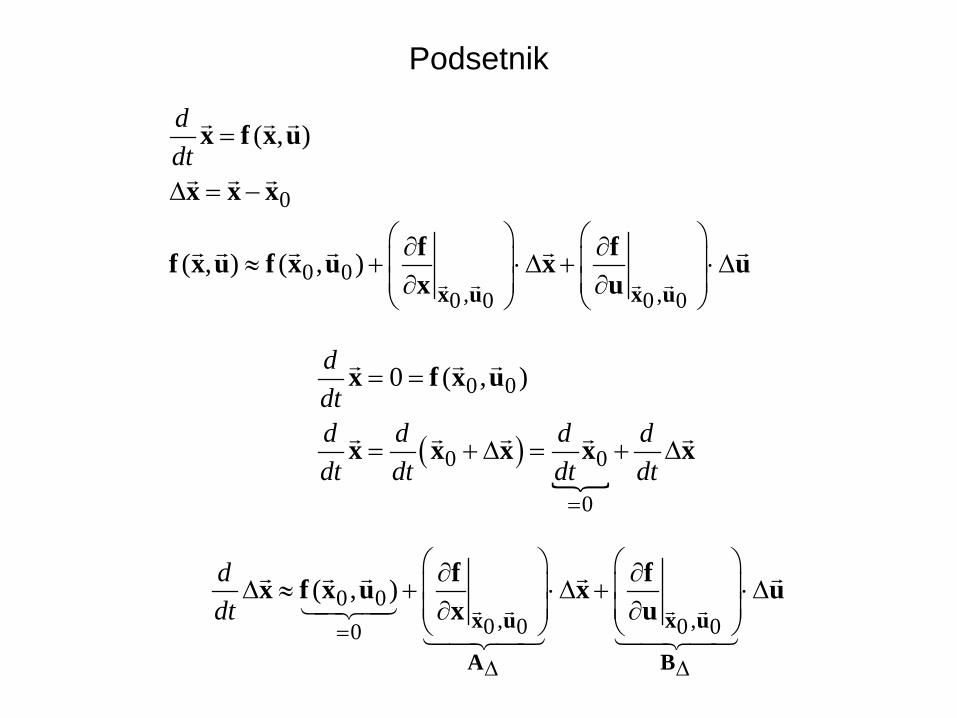
0
0 0, ,0 0 0 0
( , )
( , ) ( , )
ddt
=
∆ = −
∂ ∂ ≈ + ⋅∆ + ⋅∆ ∂ ∂ x u x u
x f x u
x x x
f ff x u f x u x ux u
( )
0 0
0 0
0
0 ( , )ddtd d d ddt dt dt dt
=
= =
= + ∆ = + ∆
x f x u
x x x x x
0 0, ,0 0 0 00
( , )ddt
=
∆ ∆
∂ ∂ ∆ ≈ + ⋅∆ + ⋅∆ ∂ ∂ x u x u
A B
f fx f x u x ux u
Podsetnik
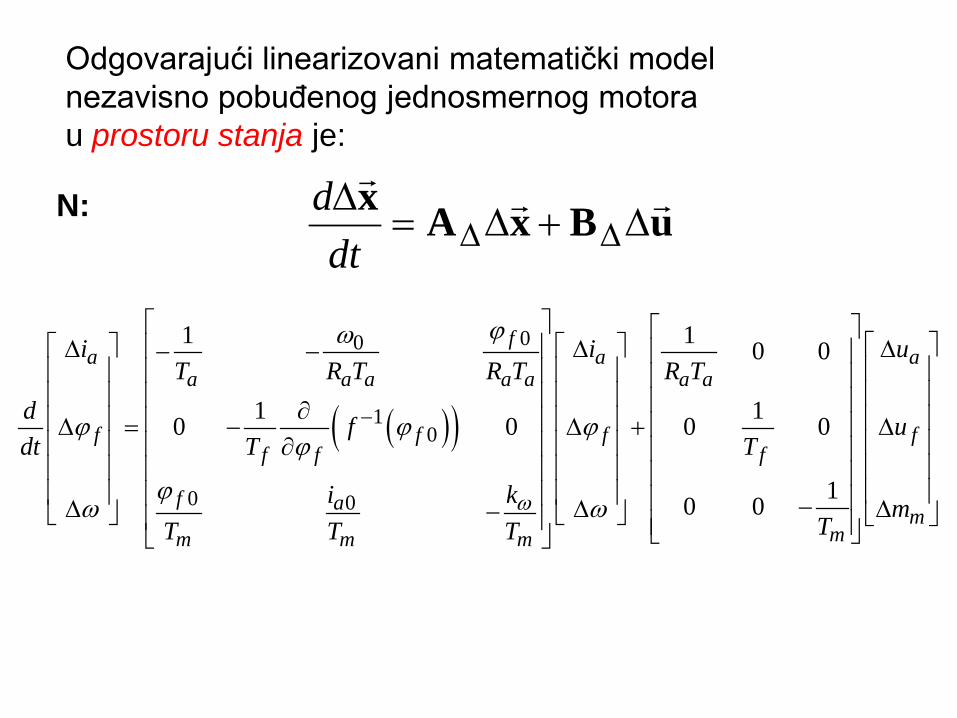
( )( )
00
10
0 0
1 1 0 0
1 10 0 0 0
10 0
fa a a
a a a a a a a
f f f ff f f
f a mmm m m
i i uT R T R T R T
d f udt T T
i k mTT T T
ω
ϕω
ϕ ϕ ϕϕ
ϕω ω
−
∆ ∆ ∆− − ∂ ∆ = − ∆ + ∆ ∂ −∆ ∆ ∆−
Odgovarajući linearizovani matematički model nezavisno pobuđenog jednosmernog motora u prostoru stanja je:
uBxAx
∆+∆=∆
∆∆dtdN:
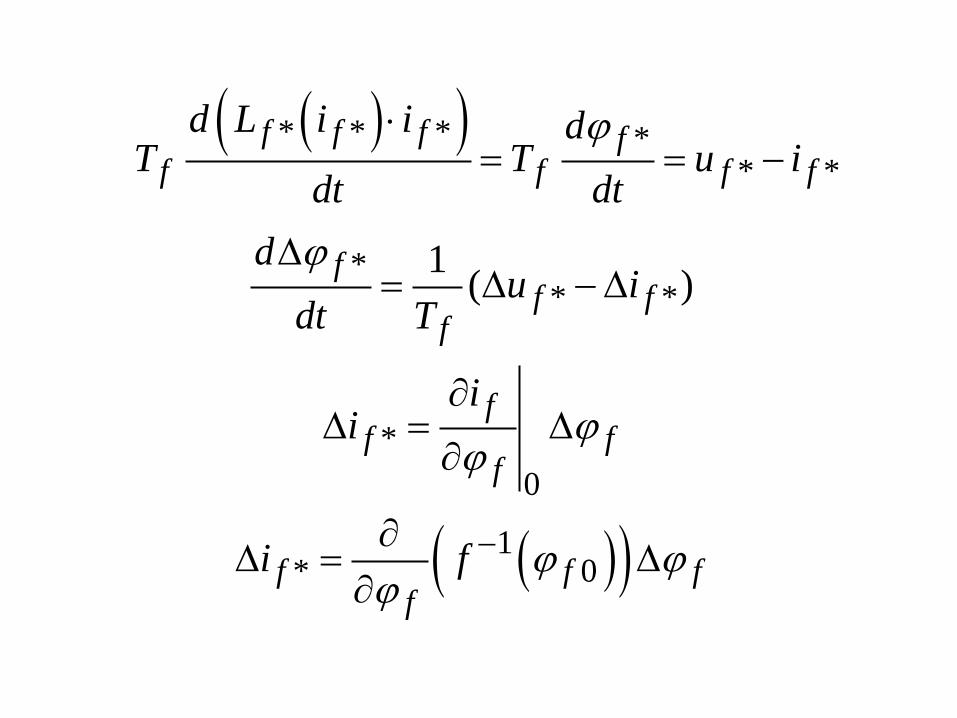
( )( )* * * ** *
f f f ff f f f
d L i i dT T u i
dt dtϕ⋅
= = −
( )( )
** *
*0
1* 0
1 ( )ff f
f
ff f
f
f f ff
du i
dt T
ii
i f
ϕ
ϕϕ
ϕ ϕϕ
−
∆= ∆ −∆
∂∆ = ∆
∂
∂∆ = ∆
∂
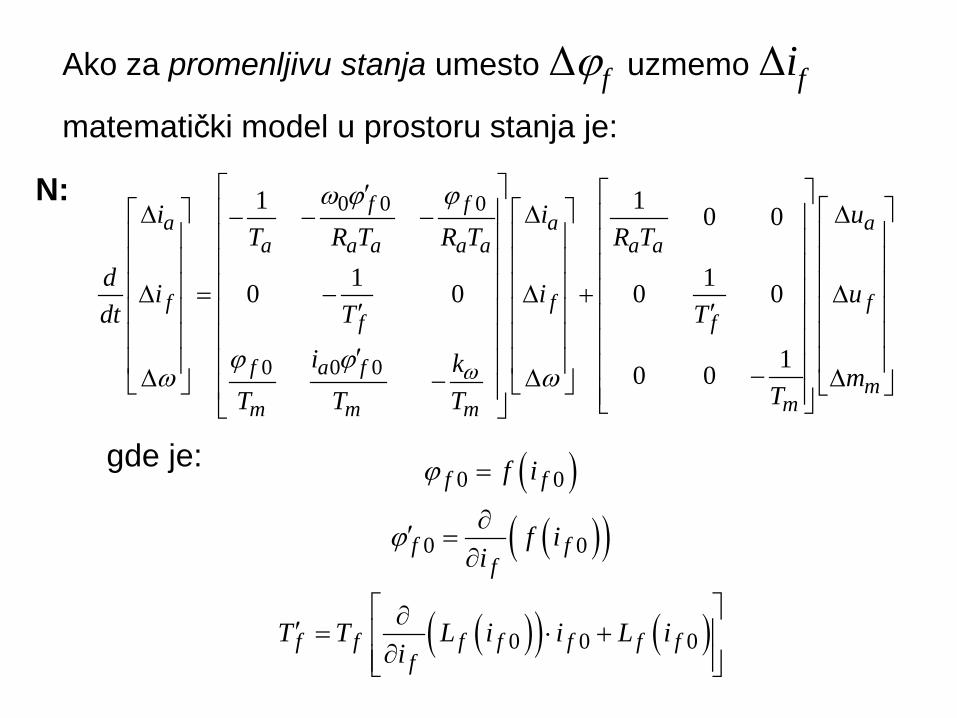
Ako za promenljivu stanja umesto Δϕf uzmemo Δif
matematički model u prostoru stanja je:
0 0 0
0 0 0
1 1 0 0
1 10 0 0 0
10 0
f fa a a
a a a a a a a
f f ff f
f a fm
mm m m
i i uT R T R T R T
d i i udt T T
i k mTT T T
ω
ω ϕ ϕ
ϕ ϕω ω
′ ∆ ∆ ∆− − − ∆ = − ∆ + ∆ ′ ′ ′ −∆ ∆ ∆−
gde je: ( )( )( )
( )( ) ( )
0 0
0 0
0 0 0
f f
f ff
f f f f f f ff
f i
f ii
T T L i i L ii
ϕ
ϕ
=
∂′ =∂
∂′ = ⋅ + ∂
N:
( )( )* * * ** *
f f f ff f f f
d L i i dT T u i
dt dtϕ⋅
= = −
( ) ( )
( ) ( ) ( )
* 0*0 * 0 * *
* 0 *0 * 0 * *
1,
f fff f f f f f
f
f f ff f f f f f f
f f
L id iT i L i u i
dt i
L i d iT T i L i u i
i dt T
∂∆ + = ∆ −∆
∂
∂ ∆ ′ = + = ∆ −∆
∂ ′
( ) ( )
( ) ( )
* * *
* *
**
*
* *
* * *
f f f f
f f f f f f
f
f ff
f f f f f f
f
L i di diT i L i u i
i dt dt
L idiT i L i u i
dt i
∂+ = −
∂ ∂
+ = − ∂
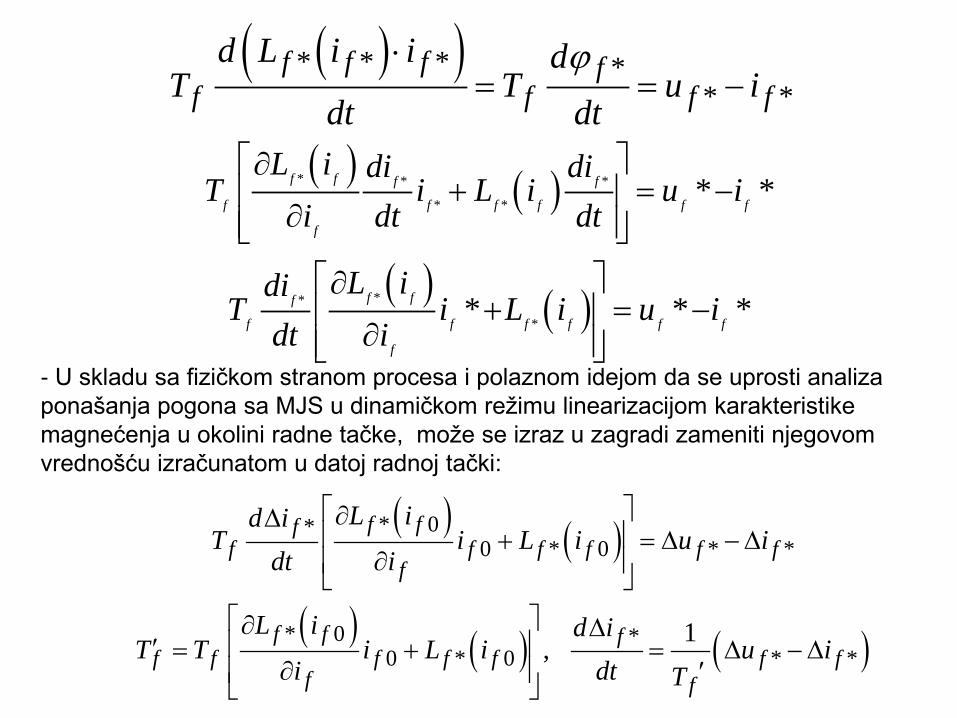
- U skladu sa fizičkom stranom procesa i polaznom idejom da se uprosti analiza ponašanja pogona sa MJS u dinamičkom režimu linearizacijom karakteristike magnećenja u okolini radne tačke, može se izraz u zagradi zameniti njegovom vrednošću izračunatom u datoj radnoj tački:
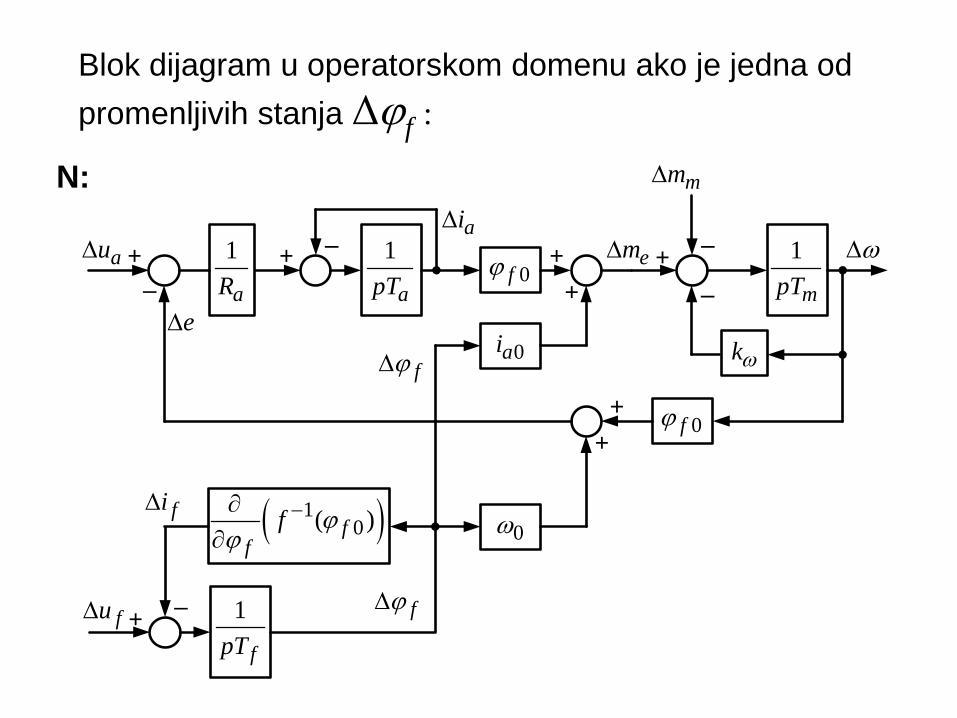
Blok dijagram u operatorskom domenu ako je jedna od promenljivih stanja Δϕf :
+−
1
apT1
mpT1
aRau∆
e∆
ai∆em∆
mm∆
ω∆+ −
1
fpT
( )10( )f
ff ϕ
ϕ−∂
∂
+ −fu∆
fi∆
fϕ∆
+ −
−
kω
0fϕ
0fϕ
++
0ai
++
0ω
fϕ∆
N:
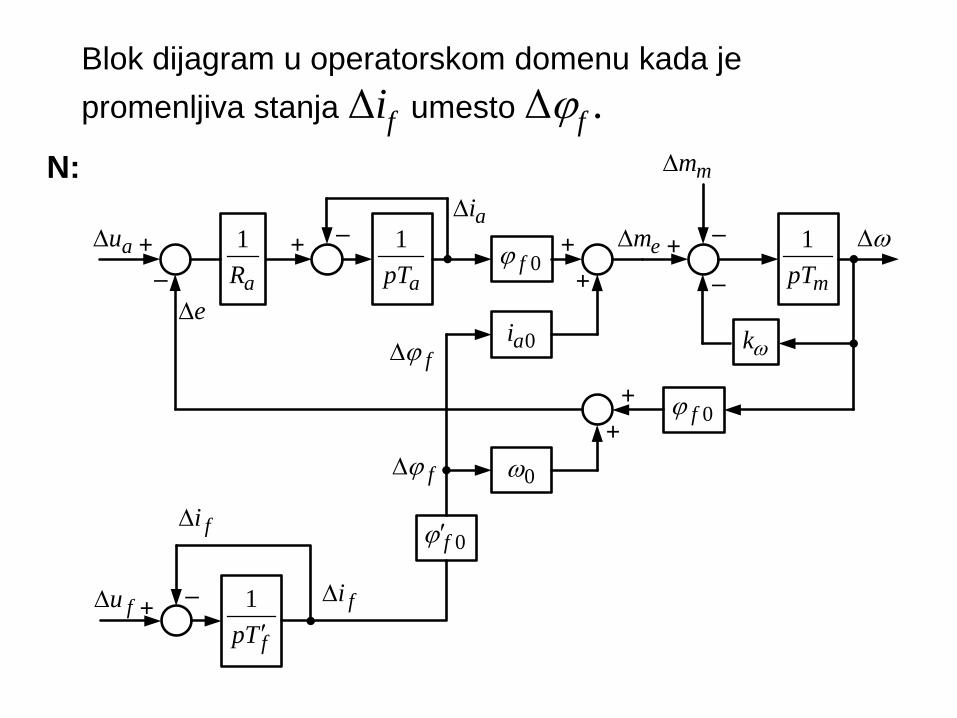
Blok dijagram u operatorskom domenu kada je promenljiva stanja Δif umesto Δϕf .
N:
+−
1
apT1
mpT1
aRau∆
e∆
ai∆em∆
mm∆
ω∆+ −
1
fpT ′+ −fu∆
fi∆
fϕ∆
+ −
−
kω
0fϕ
0fϕ
++
0ai
++
0ωfϕ∆
0fϕ′
fi∆
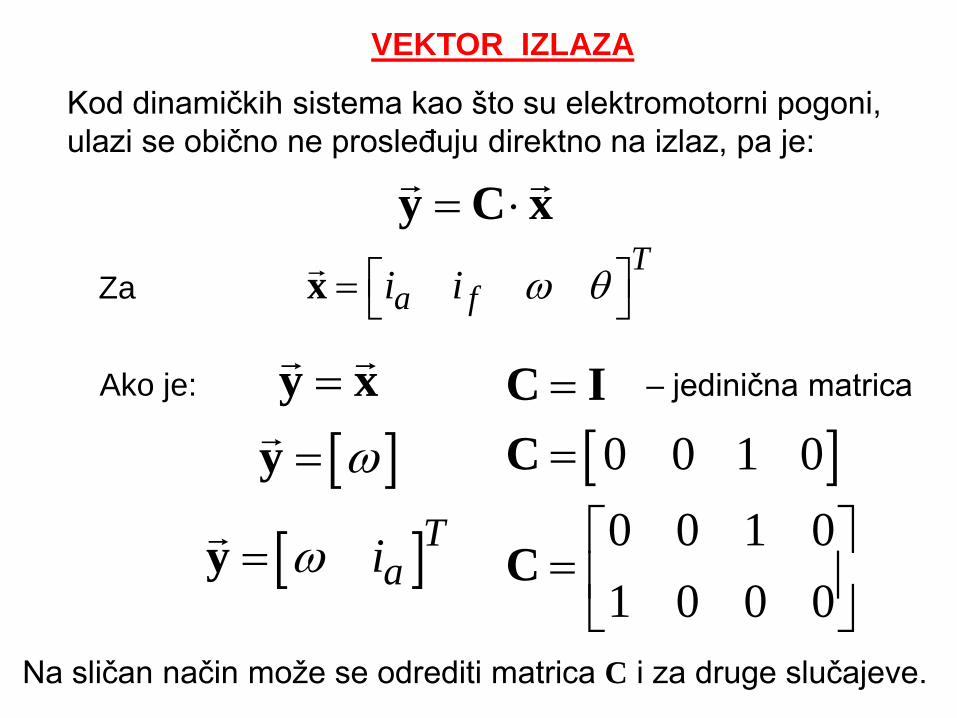
VEKTOR IZLAZA
= ⋅y C x
Ta fi i ω θ = x
=y x
– jedinična matrica
[ ]ω=y
[ ]Taiω=y
Na sličan način može se odrediti matrica C i za druge slučajeve.
Kod dinamičkih sistema kao što su elektromotorni pogoni, ulazi se obično ne prosleđuju direktno na izlaz, pa je:
Za
Ako je: =C I[ ]0 0 1 0=C0 0 1 01 0 0 0
=
C
ANALIZA DINAMIČKIH REŽIMA
Nećemo uzimati u razmatranje treću promenljivu stanja θ.
Metode: − Funkcije prenosa; − Polovi i sopstvene vrednosti; − Modelovanje.
Primenu navedenih metoda razmotrićemo na najjednostavnijem primeru u kome je posmatrani dinamički sistem LINEARAN.
.f constϕ = 0kω =
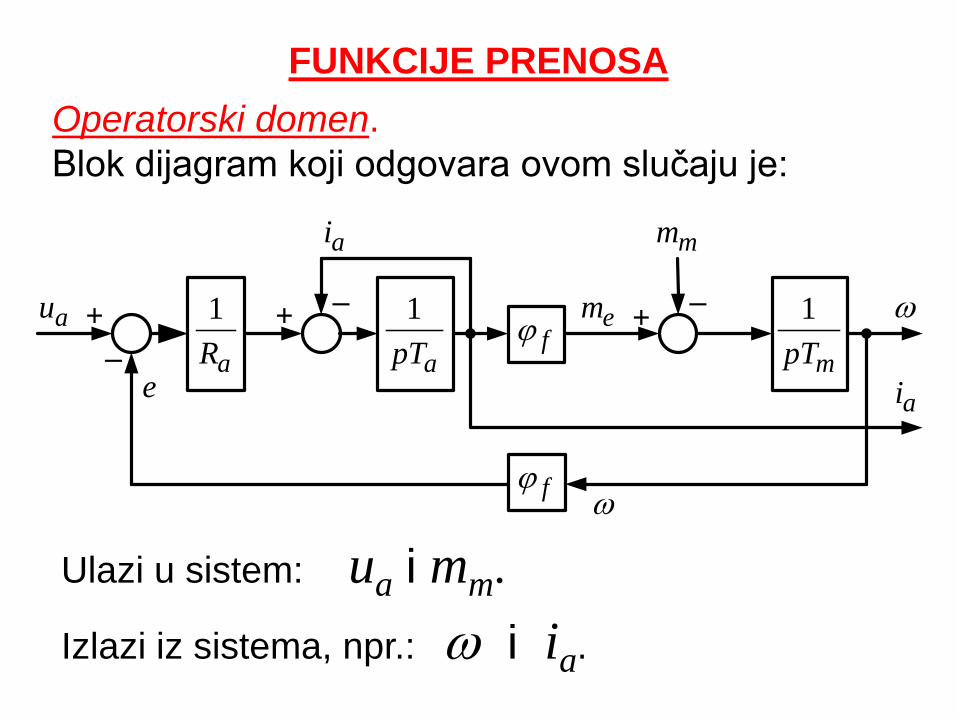
FUNKCIJE PRENOSA Operatorski domen. Blok dijagram koji odgovara ovom slučaju je:
Ulazi u sistem: ua i mm. Izlazi iz sistema, npr.: ω i ia.
+−
1
apT1
mpT1
aRau
e
ai
em
mm
ω+ −fϕ
ω
+ −
fϕ
ai
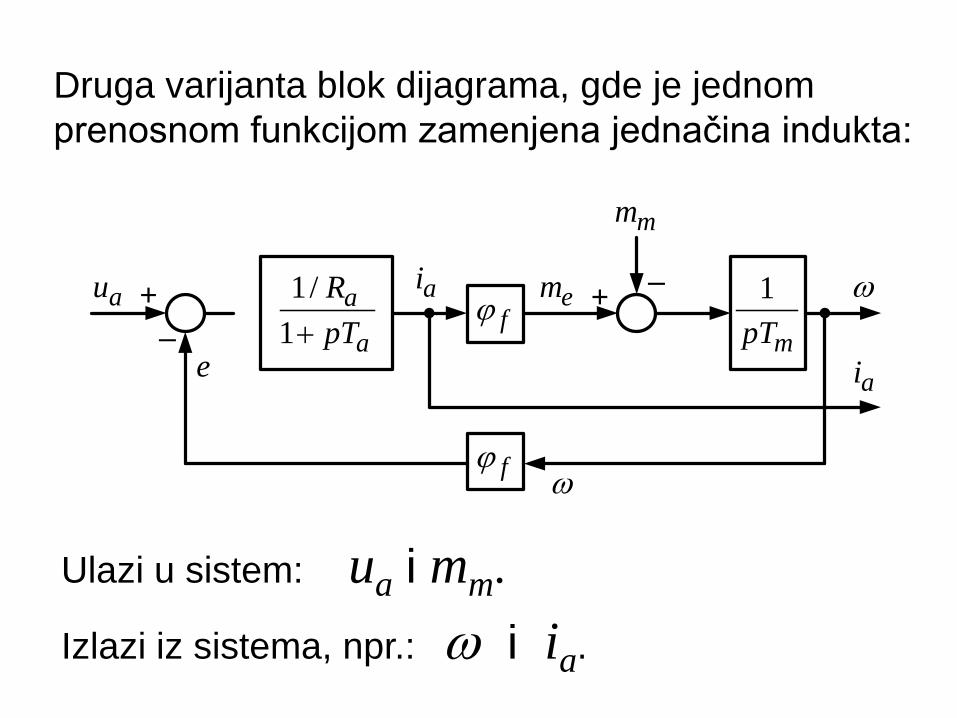
Druga varijanta blok dijagrama, gde je jednom prenosnom funkcijom zamenjena jednačina indukta:
+−
1/1
a
a
RpT+
1
mpTau
e
ai em
mm
ωfϕ
ω
+ −
fϕ
ai
Ulazi u sistem: ua i mm. Izlazi iz sistema, npr.: ω i ia.
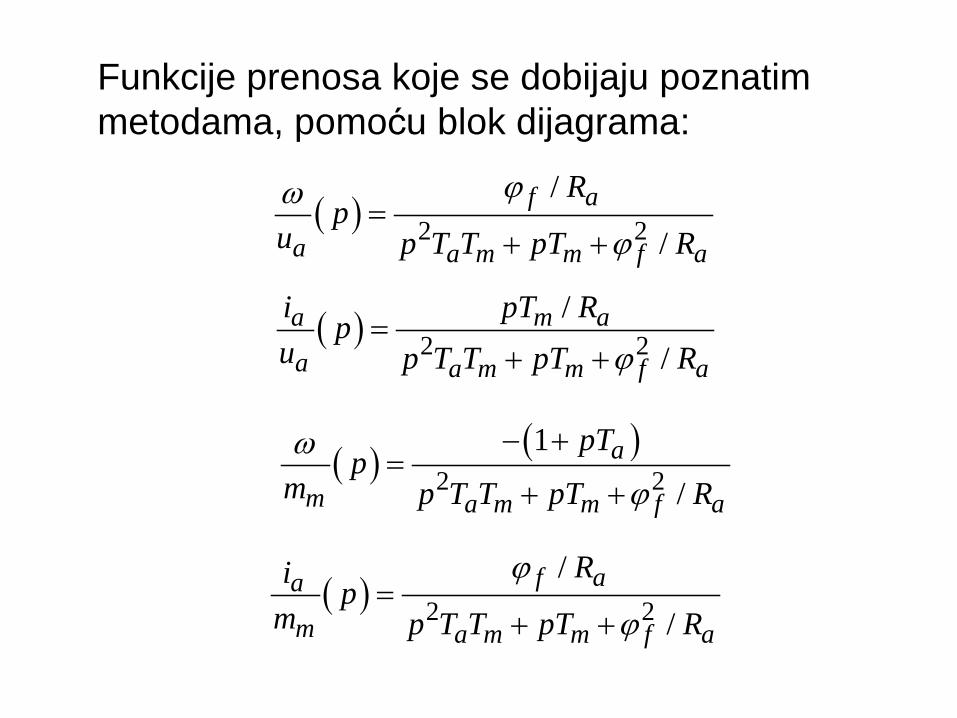
Funkcije prenosa koje se dobijaju poznatim metodama, pomoću blok dijagrama:
( ) 2 2/
/f a
a a m m f a
Rp
u p T T pT R
ϕωϕ
=+ +
( ) 2 2/
/a m a
a a m m f a
i pT Rpu p T T pT Rϕ
=+ +
( ) ( )2 2
1
/a
m a m m f a
pTp
m p T T pT Rω
ϕ
− +=
+ +
( ) 2 2/
/f aa
m a m m f a
Ri pm p T T pT R
ϕ
ϕ=
+ +
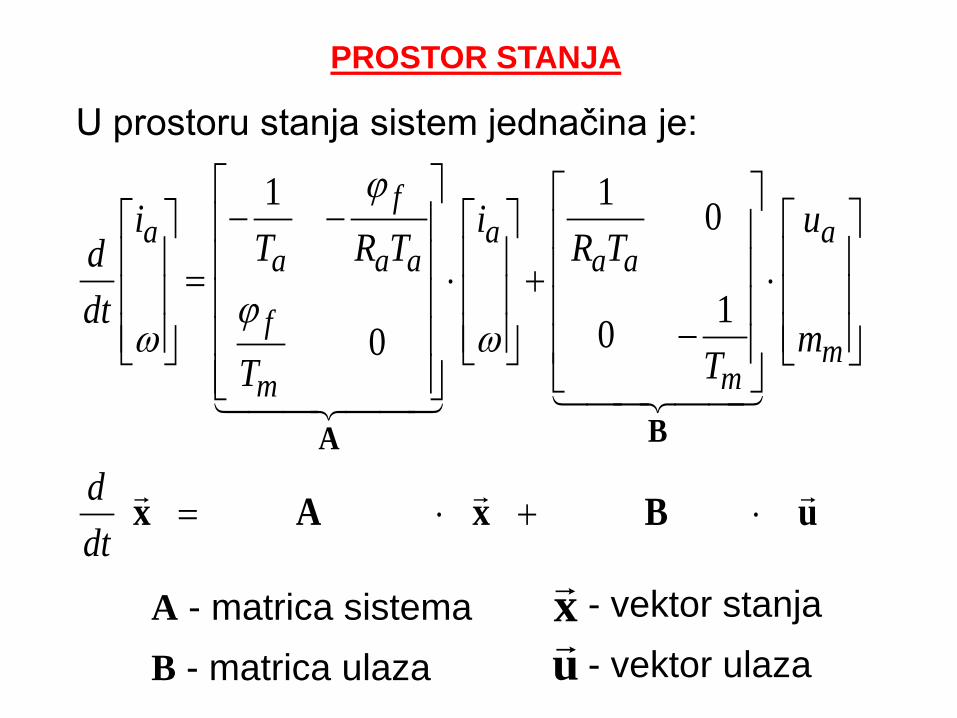
PROSTOR STANJA
U prostoru stanja sistem jednačina je:
1 1 0
100
fa a a
a a a a a
fm
mm
i i uT R T R Td
dtm
TT
ddt
ϕ
ϕω ω
− − = ⋅ + ⋅
−
= ⋅ + ⋅
BA
x A x B u
A - matrica sistema B - matrica ulaza
- vektor stanja x
- vektor ulaza u
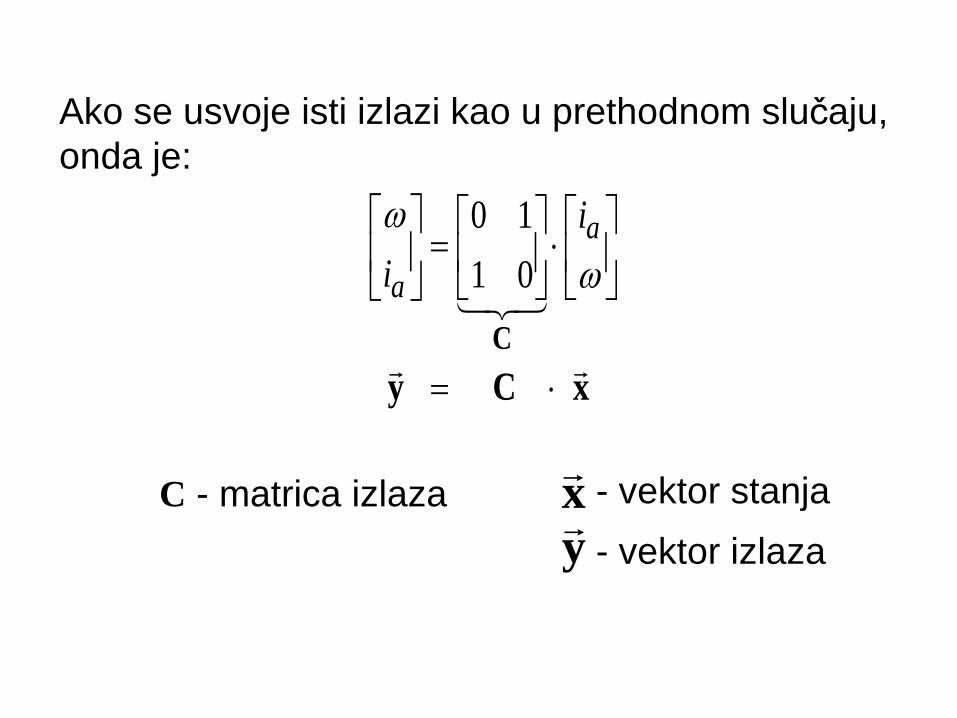
Ako se usvoje isti izlazi kao u prethodnom slučaju, onda je:
0 11 0
a
a
iiω
ω
= ⋅
= ⋅C
y C x
C - matrica izlaza - vektor stanja x
- vektor izlaza y
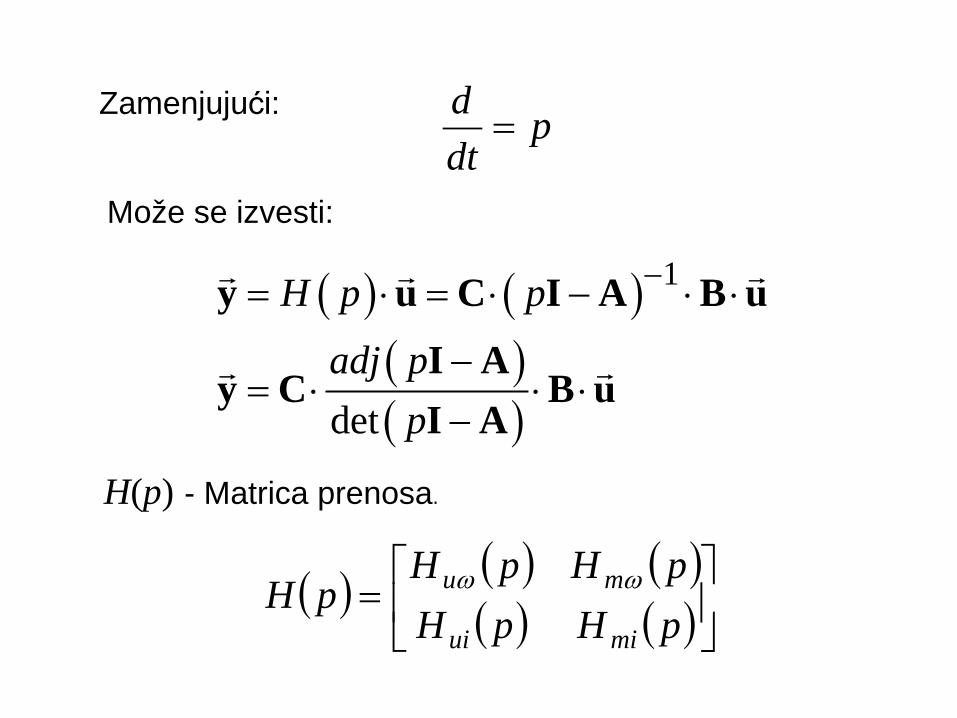
Zamenjujući: pdtd=
Može se izvesti:
( ) ( )( )( )
1
det
H p p
adj pp
−= ⋅ = ⋅ − ⋅ ⋅
−= ⋅ ⋅ ⋅
−
y u C I A B u
I Ay C B u
I A
H(p) - Matrica prenosa.
( ) ( ) ( )( ) ( )
=
pHpHpHpH
pHmiui
mu ωω
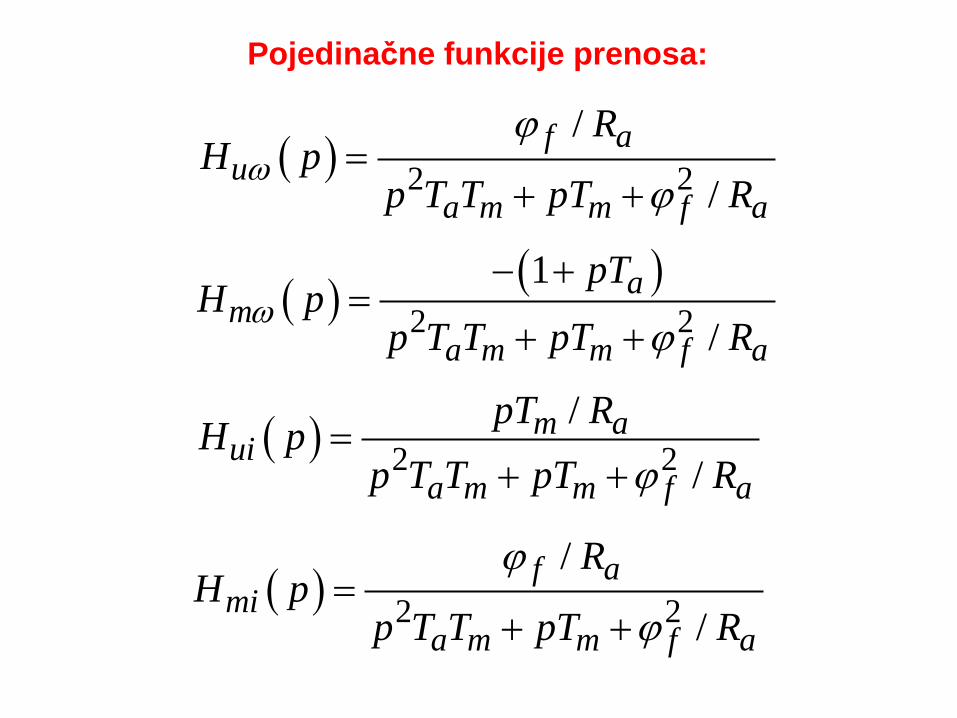
Pojedinačne funkcije prenosa:
( ) 2 2/
/f a
ua m m f a
RH p
p T T pT Rω
ϕ
ϕ=
+ +
( ) 2 2/
/m a
uia m m f a
pT RH pp T T pT Rϕ
=+ +
( ) ( )2 2
1
/a
ma m m f a
pTH p
p T T pT Rω
ϕ
− +=
+ +
( ) 2 2/
/f a
mia m m f a
RH p
p T T pT R
ϕ
ϕ=
+ +
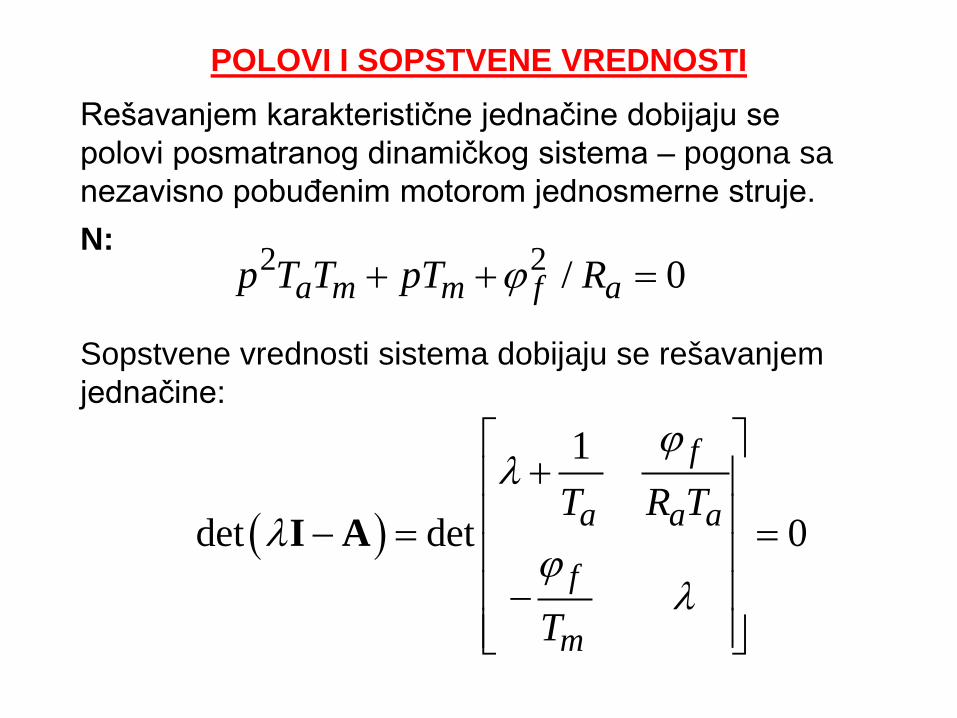
POLOVI I SOPSTVENE VREDNOSTI Rešavanjem karakteristične jednačine dobijaju se polovi posmatranog dinamičkog sistema – pogona sa nezavisno pobuđenim motorom jednosmerne struje. N: 2 2 / 0a m m f ap T T pT Rϕ+ + =
Sopstvene vrednosti sistema dobijaju se rešavanjem jednačine:
( )
1
det det 0
f
a a a
f
m
T R T
T
ϕλ
λϕ
λ
+
− = = −
I A
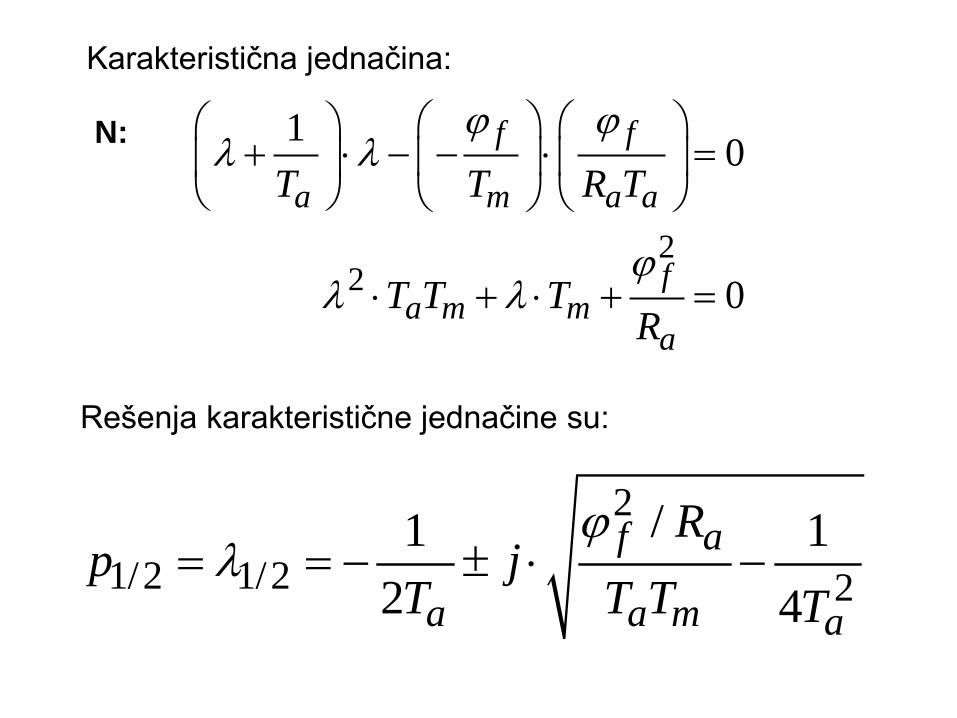
N:
22
1 0
0
f f
a m a a
fa m m
a
T T R T
T T TR
ϕ ϕλ λ
ϕλ λ
+ ⋅ − − ⋅ =
⋅ + ⋅ + =
Rešenja karakteristične jednačine su:
2
1/2 1/2 2/1 1
2 4f a
a a m a
Rp j
T T T T
ϕλ= = − ± ⋅ −
Karakteristična jednačina:
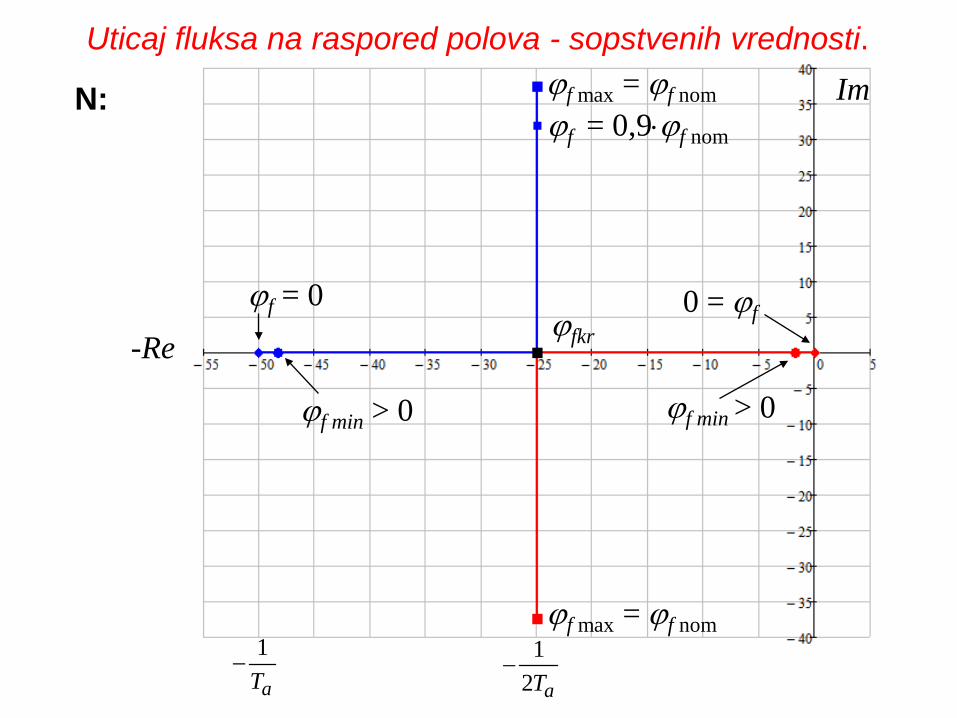
Uticaj fluksa na raspored polova - sopstvenih vrednosti.
0 = ϕf -Re
ϕf = 0
Im
ϕf min > 0
ϕf max = ϕf nom
ϕfkr
ϕf max = ϕf nom
ϕf min > 0
N:
1
aT− 1
2 aT−
ϕf = 0,9⋅ϕf nom
a
amfkr T
RT21
±=ϕ
min0 f f fkrϕ ϕ ϕ< < <
fkr f fnomϕ ϕ ϕ< <
[ ] [ ]1/2 1/2Im Im 0p λ= ≠
Vrednost fluksa pri kojoj se polovi izjednačavaju, odnosno postaju konjugovano-kompleksni brojevi.
[ ] [ ]1/2 1/2Im p Im 0λ= =Za
[ ] [ ]1 2 1/21Re Re
2/a
pT
λ= = −Za
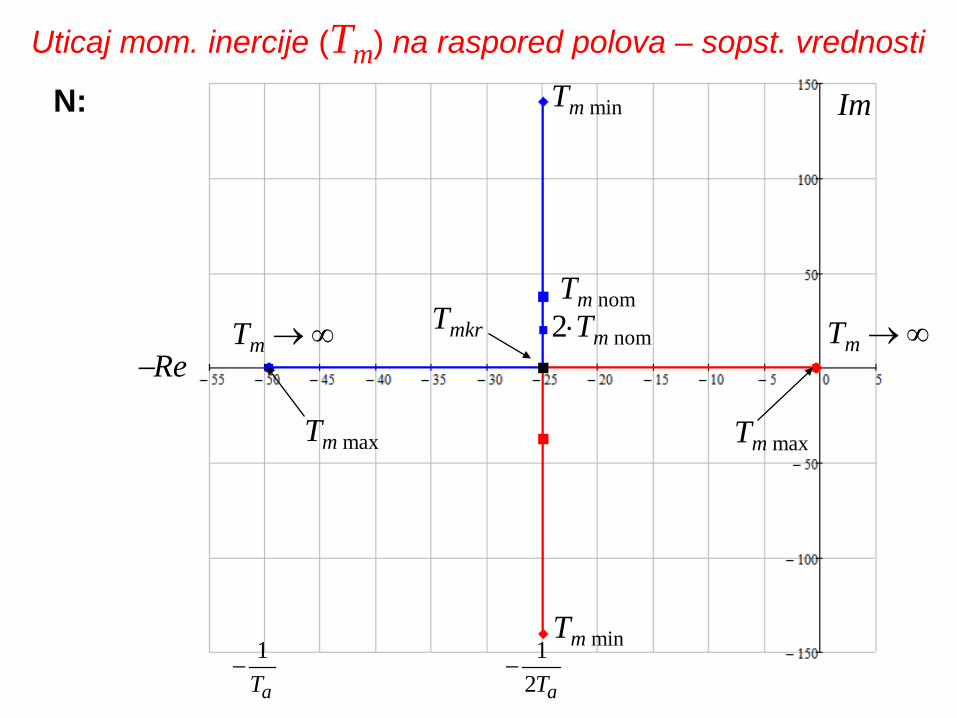
Uticaj mom. inercije (Tm) na raspored polova – sopst. vrednosti
Tm → ∞ Tm → ∞
Tm max
Tm min
Tmkr
Tm min
Tm max
N:
−Re
Im
1
aT−
12 aT
−
Tm nom 2⋅Tm nom
24 a fmkr
a
TT
Rϕ⋅
=
minm m mkrT T T< <
maxmkr m mT T T< <
[ ] [ ]1/2 1/2Im Im 0p λ= ≠
[ ] [ ]1 2 1/21Re Re
2/a
pT
λ= = −
[ ] [ ]1 2 1/2Im Im 0/p λ= =
Vrednost mehaničke vremenske konstante pri kojoj dolazi do promene prirode polova
Za
Za
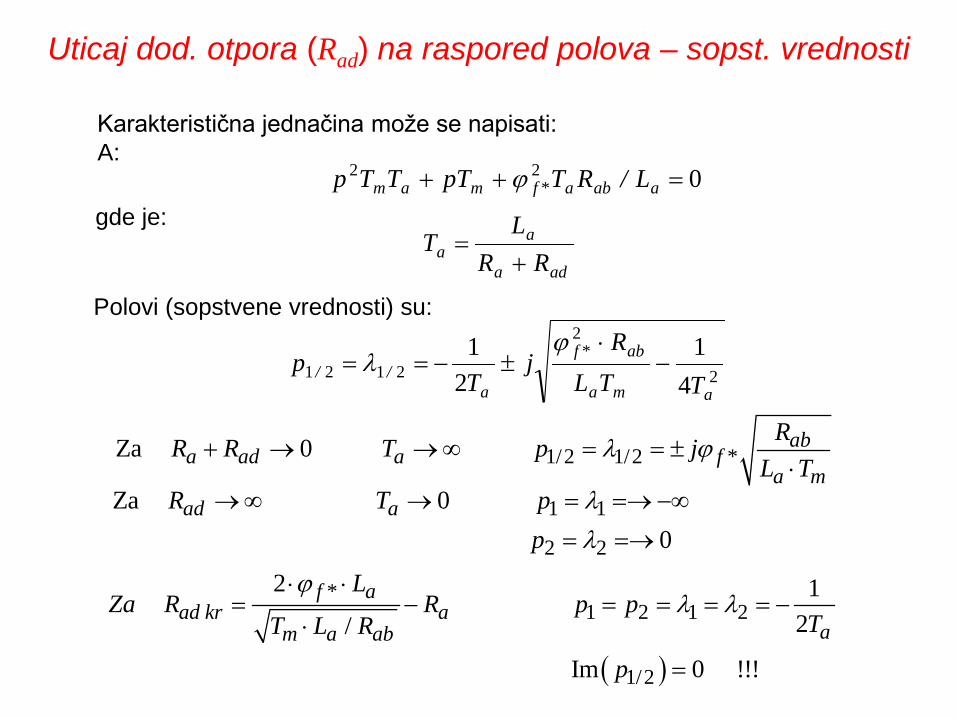
Uticaj dod. otpora (Rad) na raspored polova – sopst. vrednosti
Karakteristična jednačina može se napisati: A:
022 =++ aaba*fmam L/RTpTTTp ϕgde je:
ada
aa RR
LT
+=
Polovi (sopstvene vrednosti) su:
2
2
2121 41
21
ama
ab*f
a// TTL
Rj
Tp −
⋅±−==
ϕλ
1/2 1/2 *Za 0 aba ad a f
a m
RR R T p jL T
λ ϕ+ → →∞ = = ±⋅
1 1
2 2
Za 00
ad aR T pp
λλ
→∞ → = =→ −∞
= =→
( )
*1 2 1 2
1/2
2 12/
Im 0 !!!
f aad kr a
am a ab
LZa R R p p
TT L R
p
ϕλ λ
⋅ ⋅= − = = = = −
⋅
=
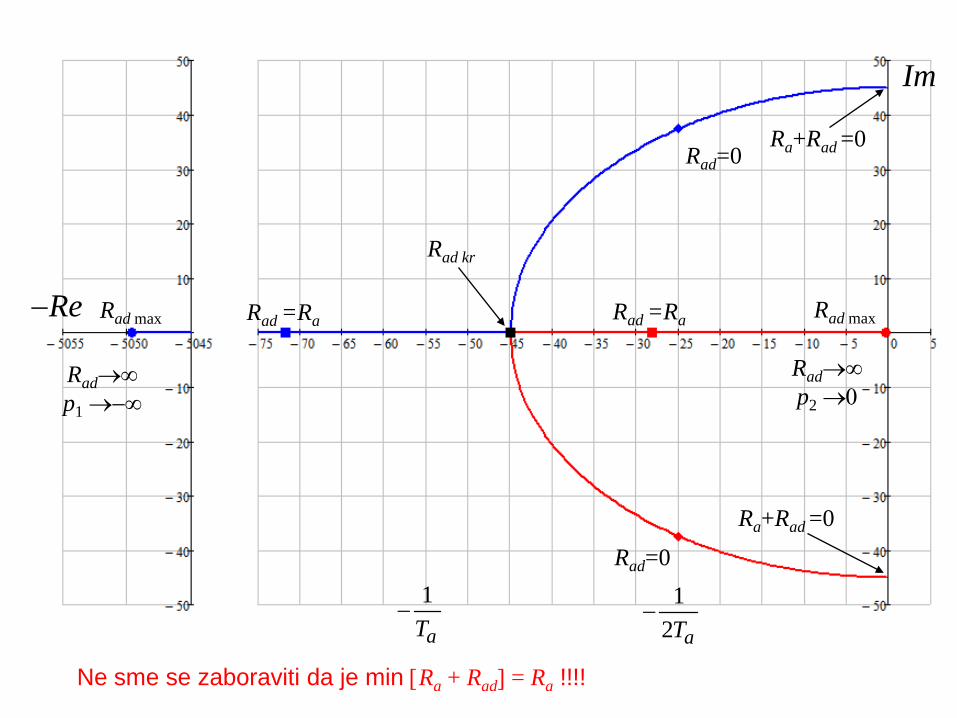
Ne sme se zaboraviti da je min [Ra + Rad] = Ra !!!!
Im
−Re
Ra+Rad =0
Ra+Rad =0
Rad=0
Rad=0
Rad→∞ p2 →0
Rad→∞ p1 →−∞
1
aT− 1
2 aT−
Rad kr
Rad =Ra Rad =Ra Rad max Rad max
PROCENA PONAŠANJA POGONA U TRANZIJENTNIM STANJIMA POMOĆU FUNKCIJA PRENOSA
Potrebno je odrediti: ∆y(t) za odgovarajuće ∆u(t)
Egzaktna zavisnost dobija se inverznom Laplasovom transformacijom:
( ) ( )1( ) yy t p u pu
− ∆ = ⋅∆ L
Za inženjerske potrebe dovoljno je napraviti procenu na osnovu poznavanja: -polova ( sopstvenih vrednosti ); -vrednosti ∆y(0) i -vrednosti ∆y (∞).
LAPLASOVA TRANSFORMACIJA
( ) ( )( ) ( )0
£ ptF p f t f t e d t∞
−= = ⋅∫Umesto promenljive t – vreme, uvodi se promenljiva “p” – Laplasov operator, kompleksna promenljiva:
21n np j jσ ω ξ ω ω ξ= + ⋅ = ⋅ + ⋅ −
Gde je: σ – prigušenje;
ω – sopstvena učestanost;
ξ – relativno prigušenje;
ωn – prirodna učestanost.
Pierre-Simon Laplace 1749-1827
Podsećanje…
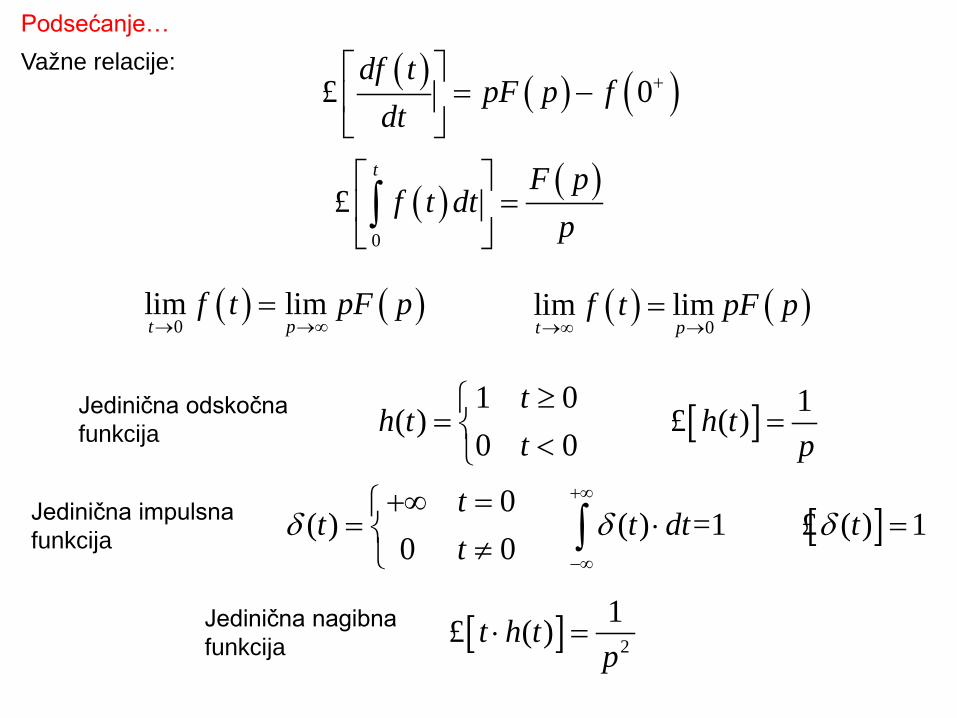
Važne relacije: ( ) ( ) ( )£ 0df t
pF p fdt
+ = −
( ) ( )0
£t F p
f t dtp
=
∫
( ) ( )0
lim limt p
f t pF p→ →∞
=
Jedinična odskočna funkcija
[ ] 2
1£ ( )t h tp
⋅ =
[ ]1 0 1( ) £ ( )0 0
th t h t
t p≥
= = <
[ ]0( ) ( ) =1 £ ( ) 1
0 0t
t t dt tt
δ δ δ+∞
−∞
+∞ == ⋅ = ≠
∫Jedinična impulsna funkcija
( ) ( )0
lim limt p
f t pF p→∞ →
=
Jedinična nagibna funkcija
Podsećanje…
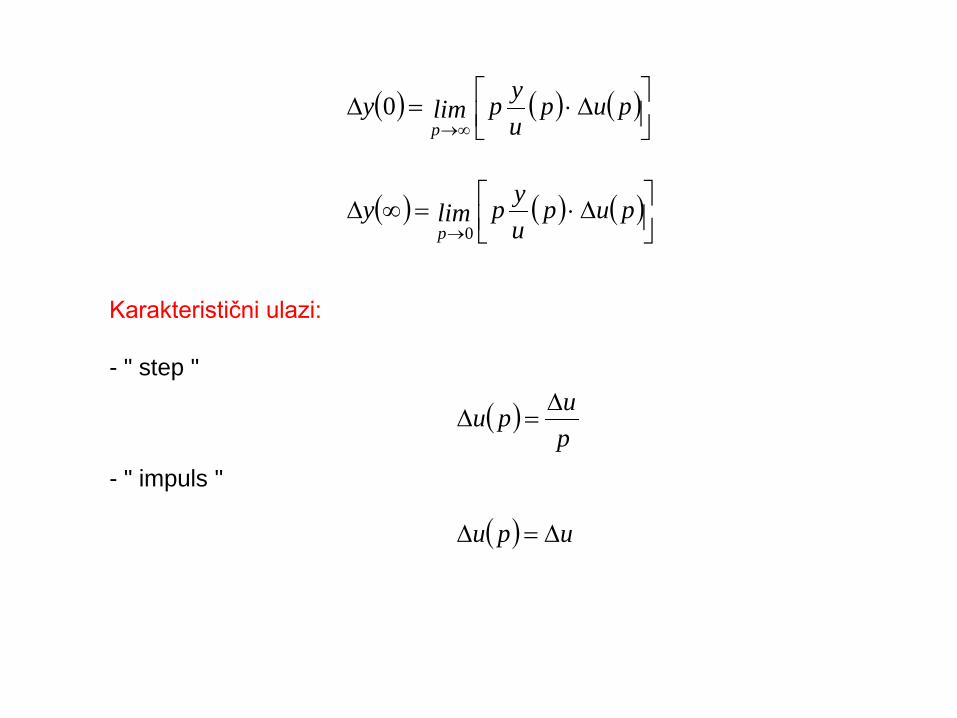
( ) ( ) ( )
∆⋅=∆
∞→pup
uyplimy
p0
( ) ( ) ( )
∆⋅=∞∆
→pup
uyplimy
p 0
( )pupu ∆
=∆
( ) upu ∆=∆
Karakteristični ulazi: - " step "
- " impuls "
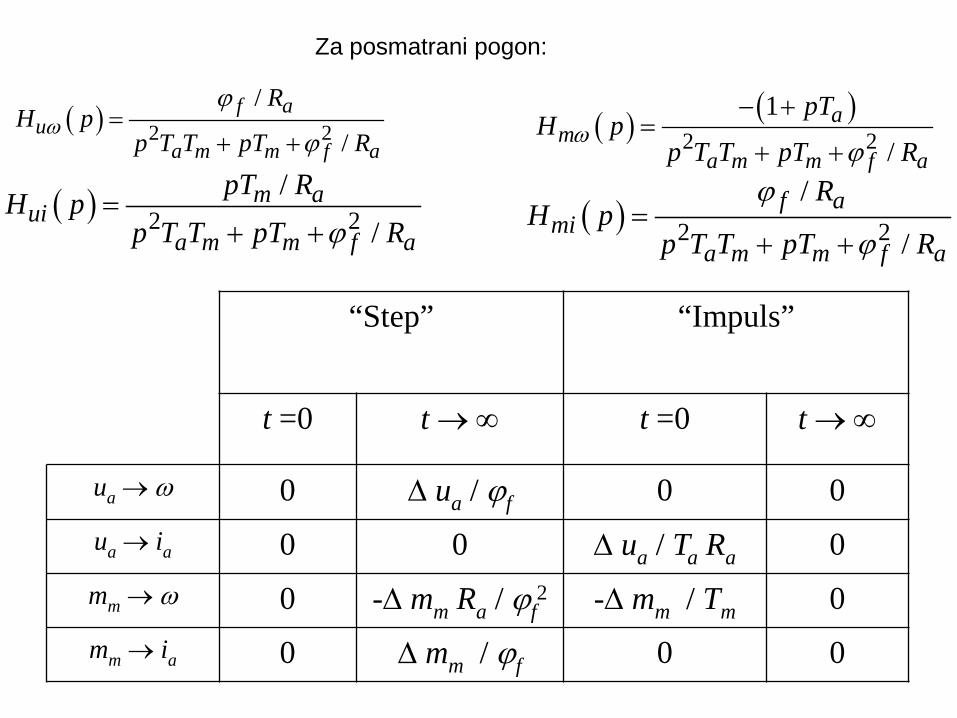
Za posmatrani pogon:
“Step” “Impuls”
t =0 t → ∞ t =0 t → ∞
ua → ω 0 ∆ ua / ϕf 0 0 ua → ia 0 0 ∆ ua / Ta Ra 0 mm → ω 0 -∆ mm Ra / ϕf
2 -∆ mm / Tm 0 mm → ia 0 ∆ mm / ϕf 0 0
( ) 2 2/
/f a
ua m m f a
RH p
p T T pT Rω
ϕ
ϕ=
+ +
( ) 2 2/
/m a
uia m m f a
pT RH pp T T pT Rϕ
=+ +
( ) ( )2 2
1
/a
ma m m f a
pTH p
p T T pT Rω
ϕ
− +=
+ +
( ) 2 2/
/f a
mia m m f a
RH p
p T T pT R
ϕ
ϕ=
+ +
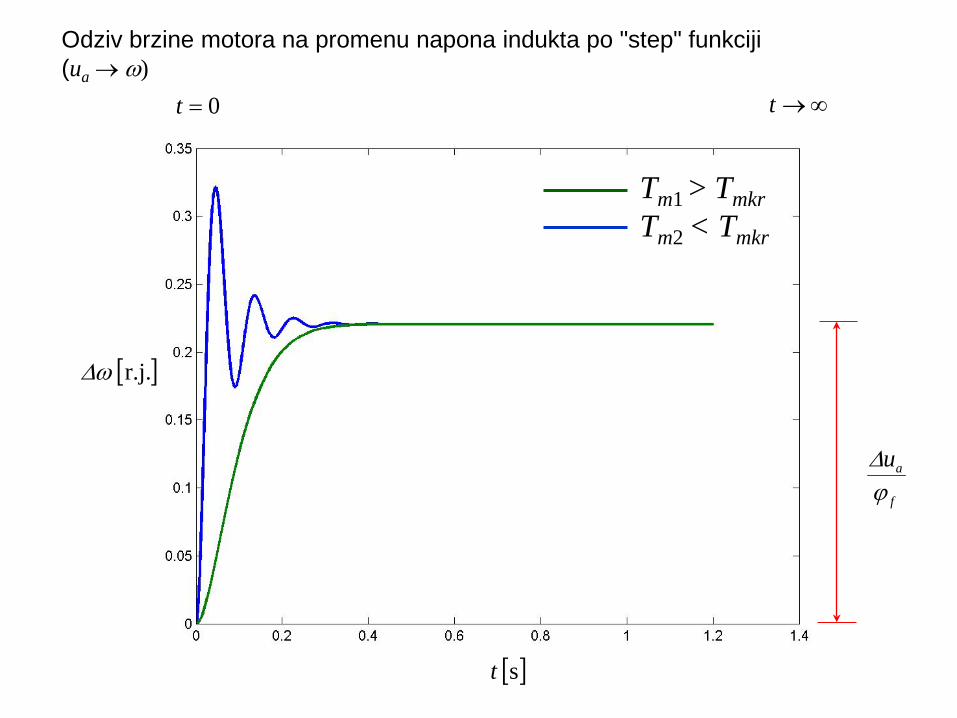
Odziv brzine motora na promenu napona indukta po "step" funkciji (ua → ω)
0=t ∞→t
[ ]r.j.ω∆
[ ]st
f
auϕ∆
Tm1 > Tmkr Tm2 < Tmkr
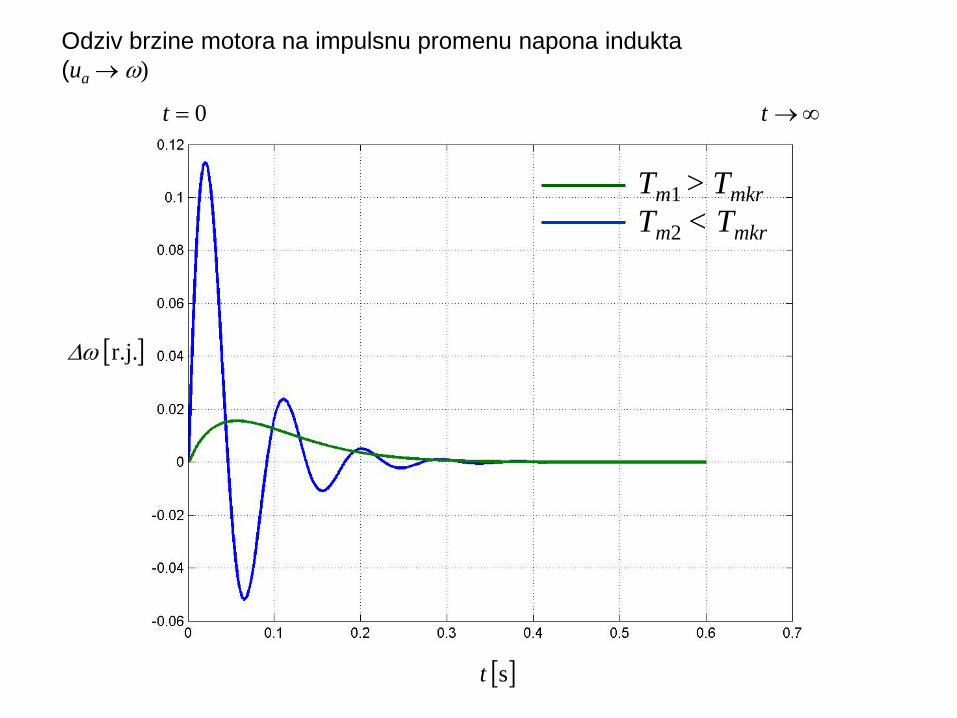
Odziv brzine motora na impulsnu promenu napona indukta (ua → ω)
[ ]r.j.ω∆
[ ]st
0=t ∞→t
Tm1 > Tmkr Tm2 < Tmkr
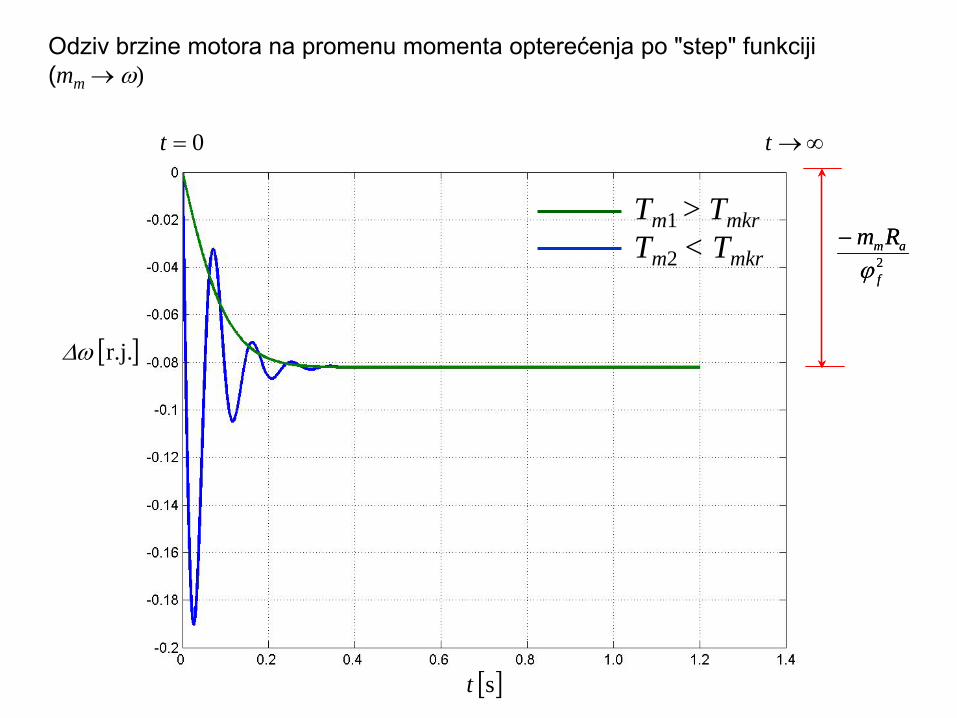
Odziv brzine motora na promenu momenta opterećenja po "step" funkciji (mm → ω)
2f
amRmϕ
−
0=t ∞→t
[ ]r.j.ω∆
[ ]st
2f
amRmϕ
−Tm1 > Tmkr Tm2 < Tmkr
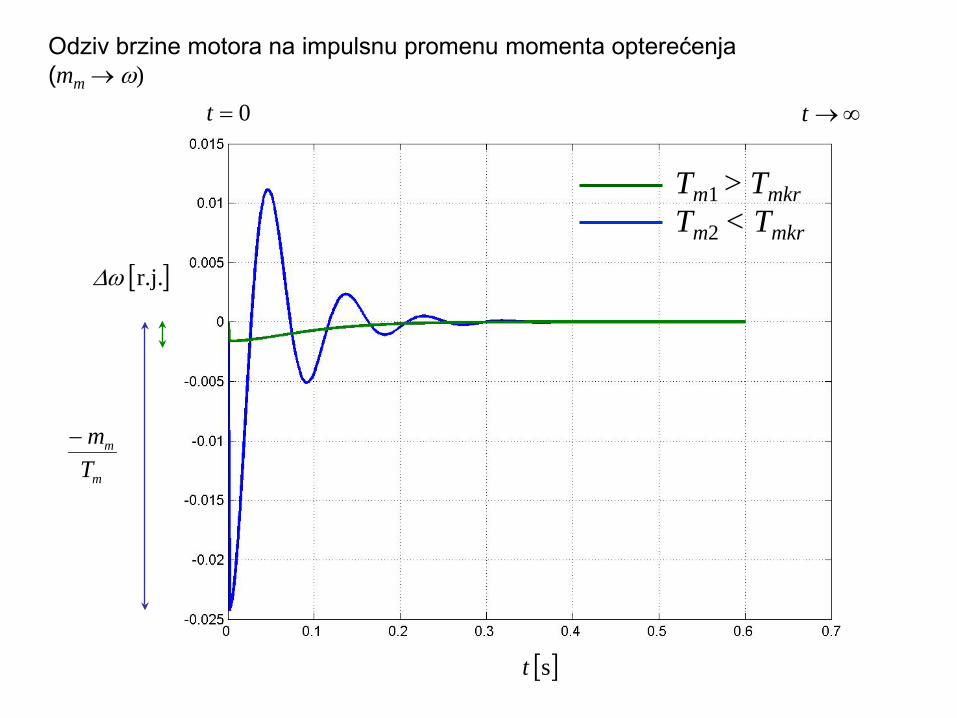
m
m
Tm−
∞→t0=t
[ ]r.j.ω∆
[ ]st
Odziv brzine motora na impulsnu promenu momenta opterećenja (mm → ω)
Tm1 > Tmkr Tm2 < Tmkr
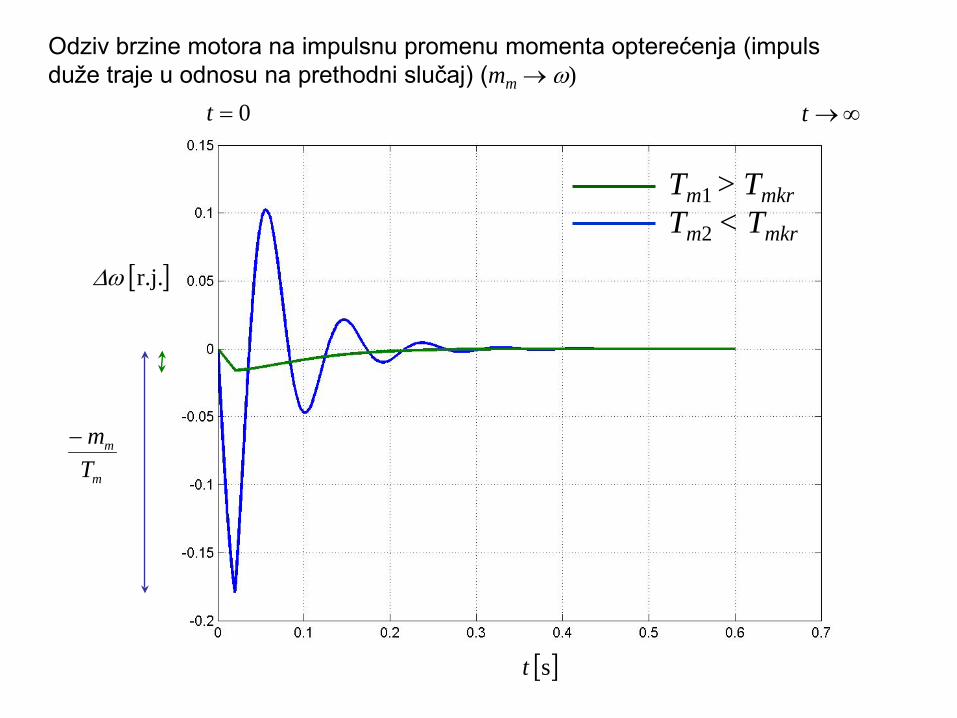
Odziv brzine motora na impulsnu promenu momenta opterećenja (impuls duže traje u odnosu na prethodni slučaj) (mm → ω)
m
m
Tm−
∞→t0=t
[ ]r.j.ω∆
[ ]st
Tm1 > Tmkr Tm2 < Tmkr
Digitalni računari i softverski paketi. Mogućnosti: •analiza nelinearnih sistema; •analiza stanja kod više istovremenih poremećaja; •interaktivan rad sa modelom; •istovremeno posmatranje više izlaza, ili karakterističnih veličina; •utvrđivanje parametara sistema na osnovu poznavanja ulaza i izlaza itd.
MODELOVANJE
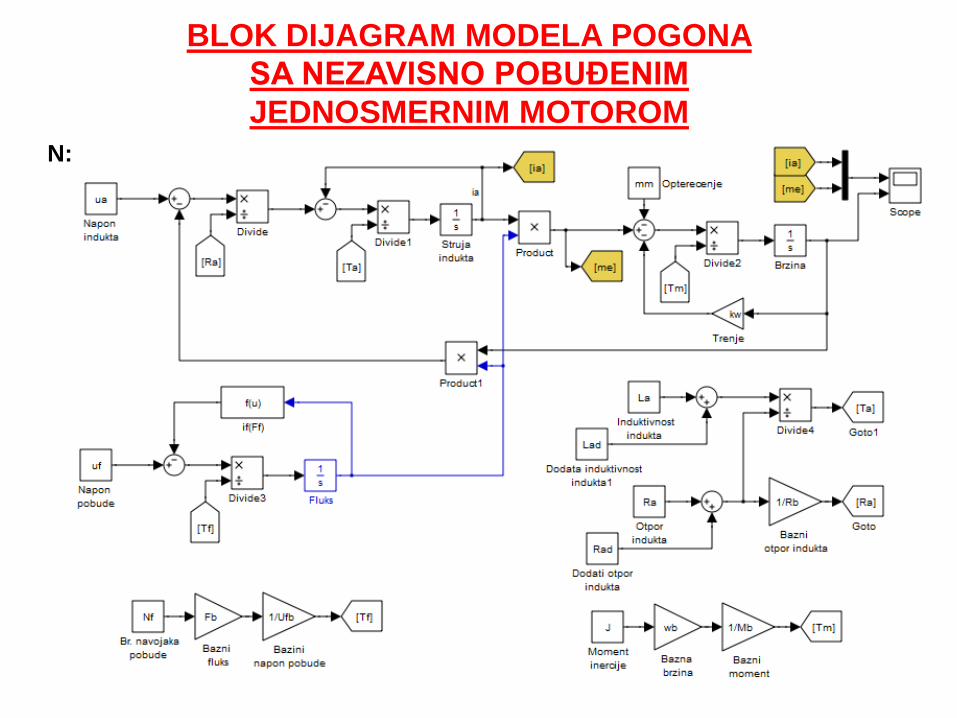
BLOK DIJAGRAM MODELA POGONA SA NEZAVISNO POBUĐENIM JEDNOSMERNIM MOTOROM
N:
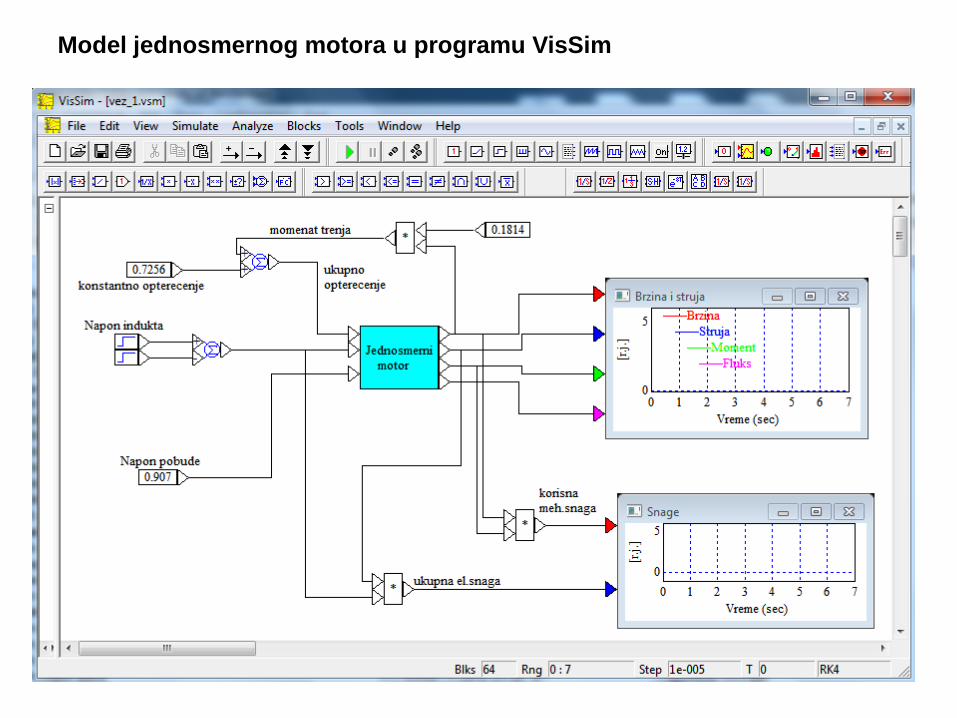
Model jednosmernog motora u programu VisSim
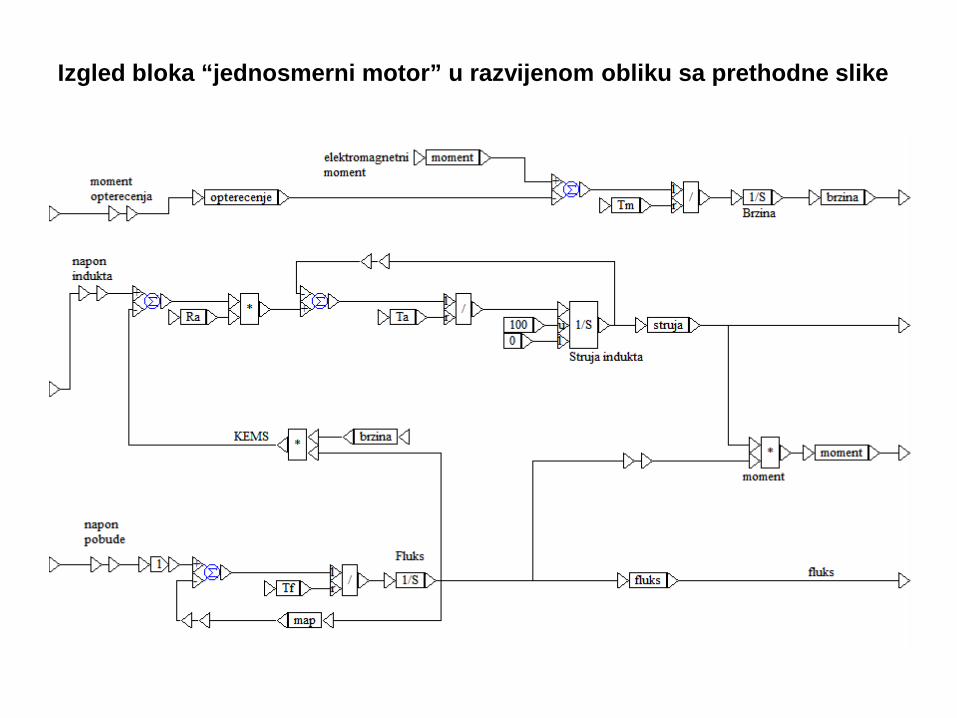
Izgled bloka “jednosmerni motor” u razvijenom obliku sa prethodne slike

Slika 1: Start pogona u praznom hodu
Struja polaska je ograničena dodatim otporom. Prelazni proces je aperiodičan.
[r.j.] 0 2 [r.j.]trm , ω= ⋅
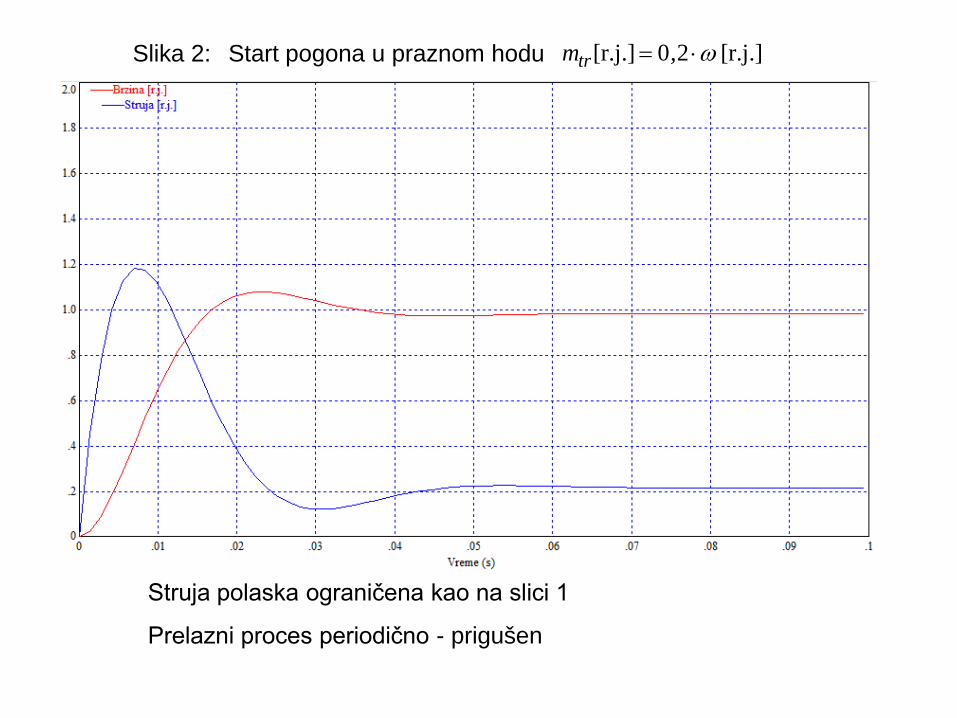
Slika 2: Start pogona u praznom hodu
Struja polaska ograničena kao na slici 1
Prelazni proces periodično - prigušen
[r.j.] 0 2 [r.j.]trm , ω= ⋅
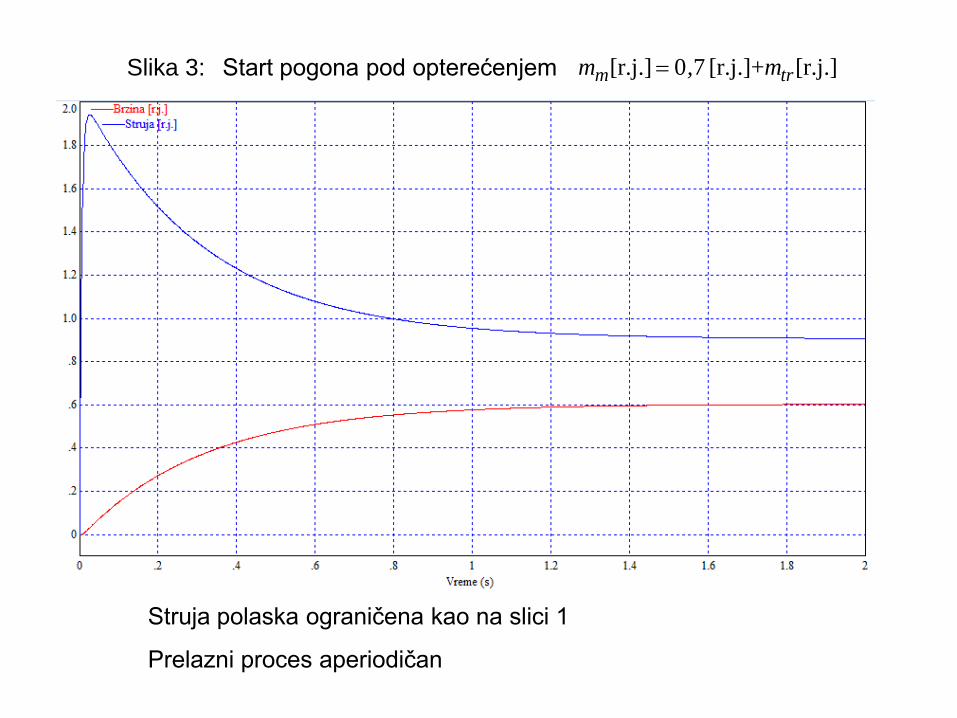
Struja polaska ograničena kao na slici 1
Prelazni proces aperiodičan
Slika 3: Start pogona pod opterećenjem [r.j.] 0 7 [r.j.]+ [r.j.]m trm , m=
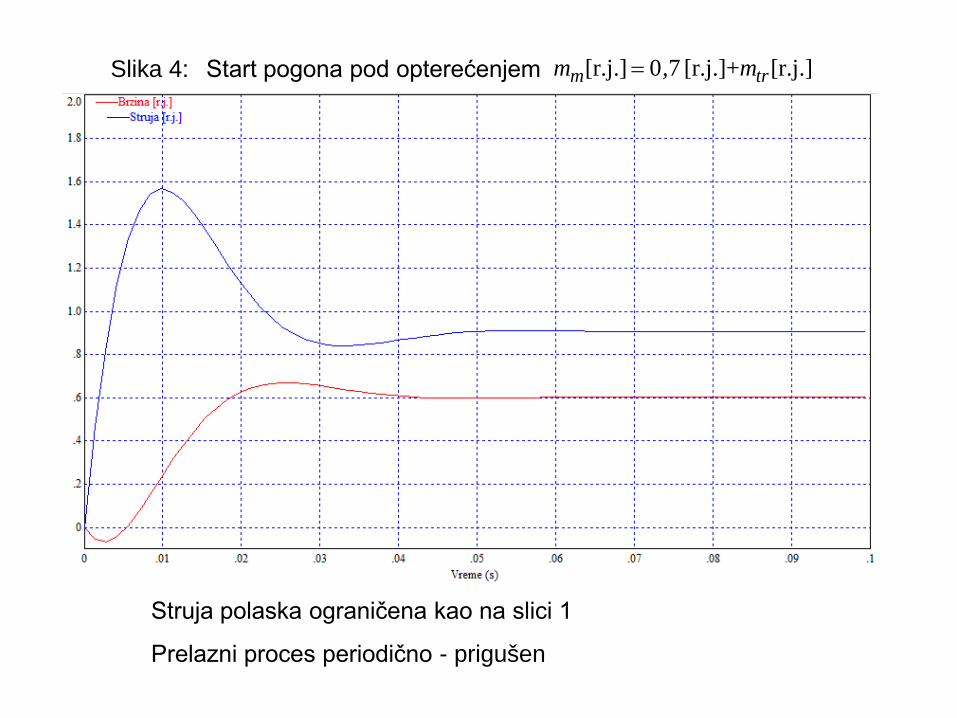
Slika 4: Start pogona pod opterećenjem
Struja polaska ograničena kao na slici 1
Prelazni proces periodično - prigušen
[r.j.] 0 7 [r.j.]+ [r.j.]m trm , m=
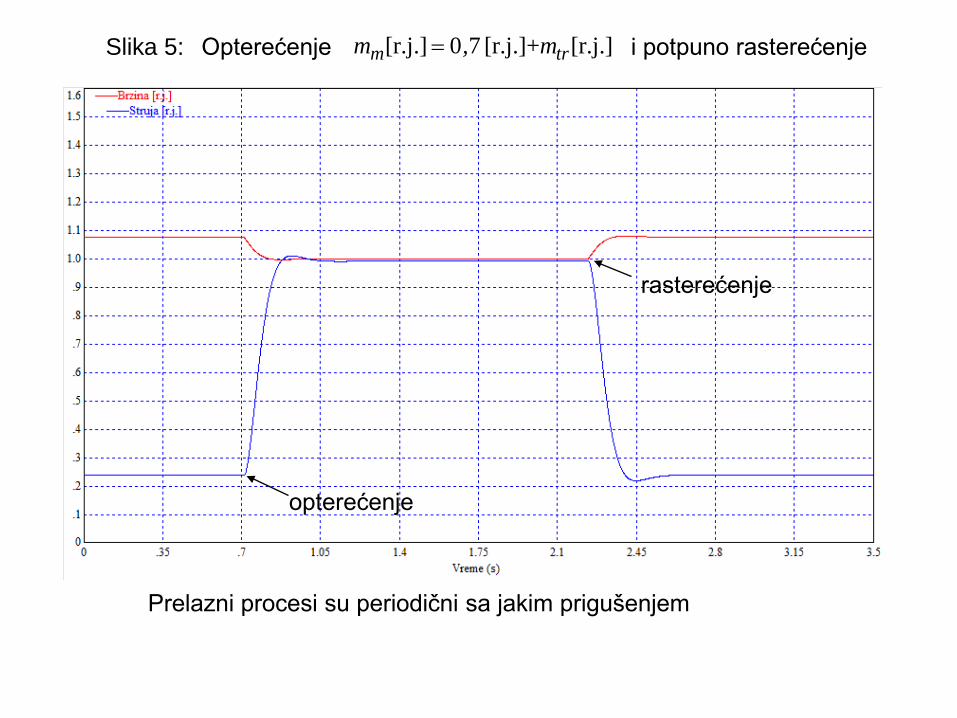
Slika 5: Opterećenje i potpuno rasterećenje
Prelazni procesi su periodični sa jakim prigušenjem
opterećenje
rasterećenje
[r.j.] 0 7 [r.j.]+ [r.j.]m trm , m=
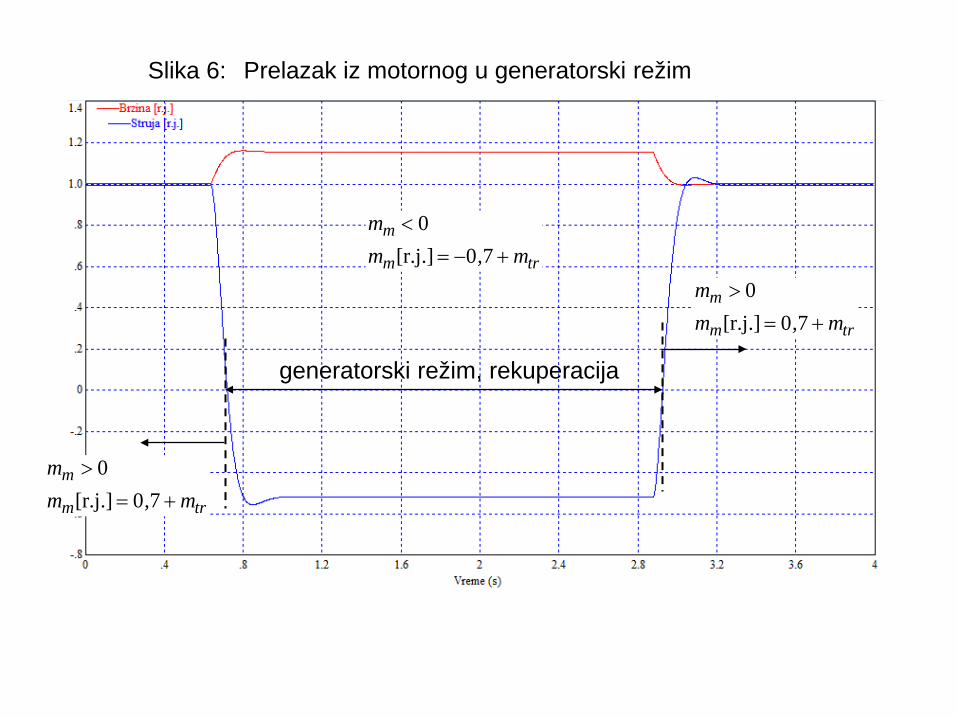
Slika 6: Prelazak iz motornog u generatorski režim
generatorski režim, rekuperacija
0[r.j.] 0 7
m
m tr
mm , m
>
= +
0[r.j.] 0 7
m
m tr
mm , m
<
= − +
0[r.j.] 0 7
m
m tr
mm , m
>
= +
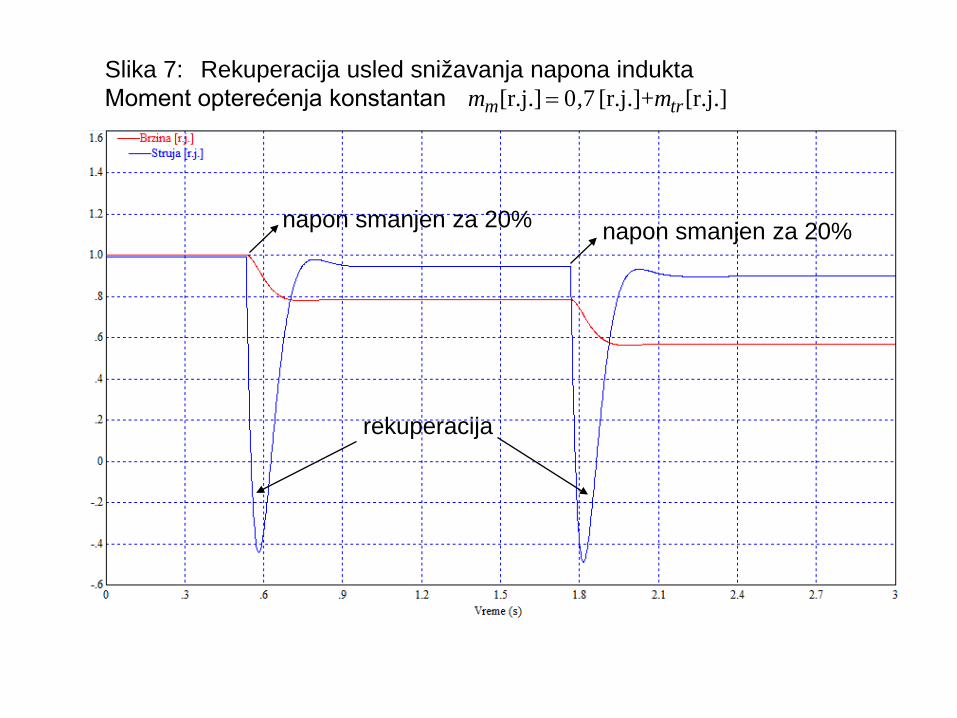
Slika 7: Rekuperacija usled snižavanja napona indukta Moment opterećenja konstantan
napon smanjen za 20% napon smanjen za 20%
rekuperacija
[r.j.] 0 7 [r.j.]+ [r.j.]m trm , m=
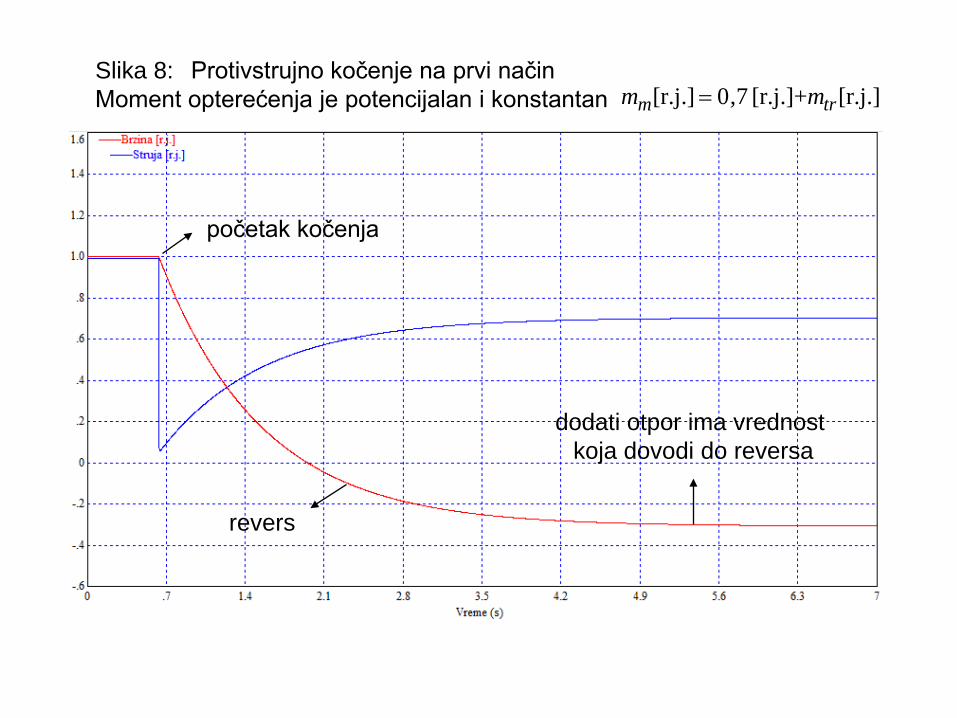
Slika 8: Protivstrujno kočenje na prvi način Moment opterećenja je potencijalan i konstantan
početak kočenja
revers
dodati otpor ima vrednost koja dovodi do reversa
[r.j.] 0 7 [r.j.]+ [r.j.]m trm , m=
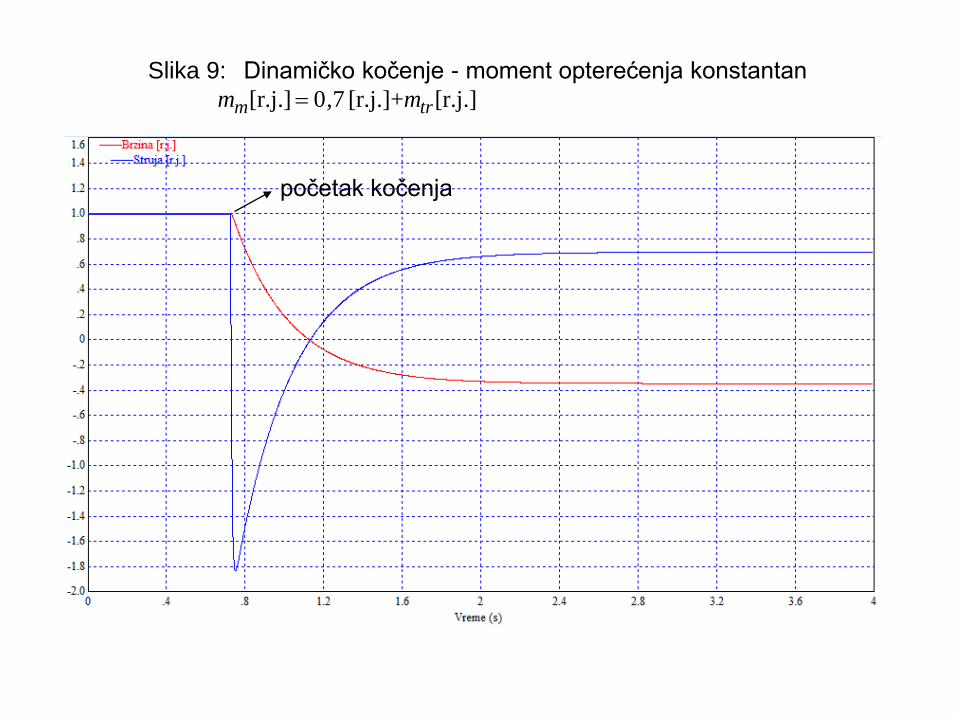
Slika 9: Dinamičko kočenje - moment opterećenja konstantan
početak kočenja
[r.j.] 0 7 [r.j.]+ [r.j.]m trm , m=
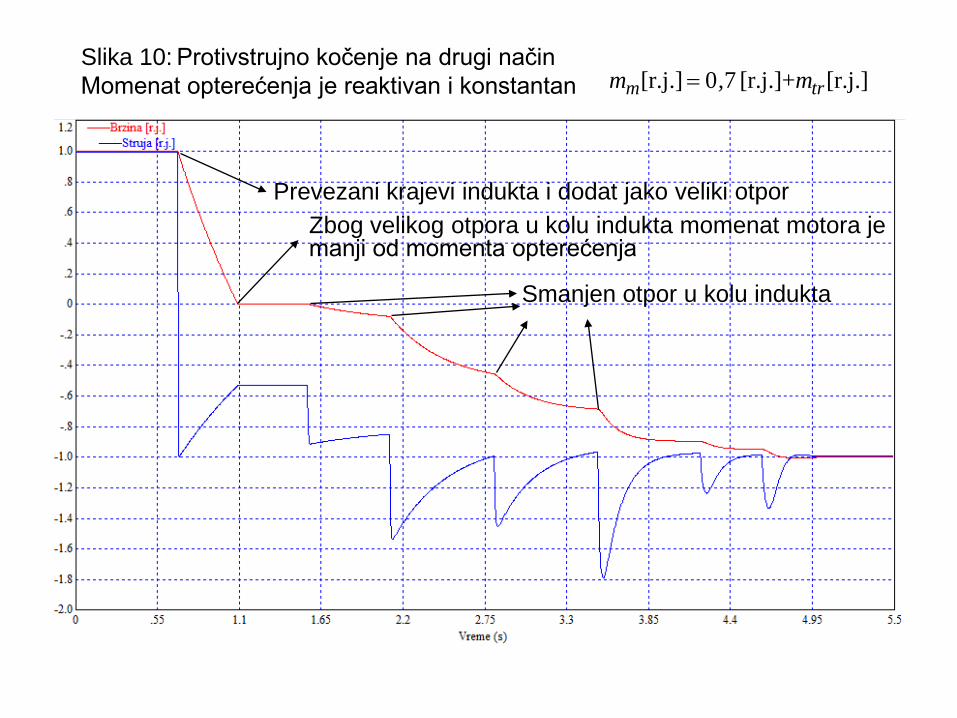
Slika 10: Protivstrujno kočenje na drugi način Momenat opterećenja je reaktivan i konstantan
Prevezani krajevi indukta i dodat jako veliki otpor Zbog velikog otpora u kolu indukta momenat motora je manji od momenta opterećenja
Smanjen otpor u kolu indukta
[r.j.] 0 7 [r.j.]+ [r.j.]m trm , m=













![LABORATÓRIO DE SISTEMAS MECATRÔNICOS E ROBÓTICA ] - LAB.pdf · Resistores - 1,0 Ω - 100k Ω 1,2 Ω - 120k Ω 1,5 Ω - 150k Ω 1,8 Ω- 180k Ω 2,2 Ω– 220k Ω 2,7 Ω– 270k](https://static.fdocument.org/doc/165x107/5c245c1a09d3f224508c4b48/laboratorio-de-sistemas-mecatronicos-e-robotica-labpdf-resistores-.jpg)