Designing rotor blades for radial equilibrium( crvarghesep/class/propulsion/Design for...Designing...
4
ASE 376K Propulsion © Philip L. Varghese, UT Austin, 2001 1 Designing rotor blades for radial equilibrium( c r » 0) The radial equilibrium condition is: dr ds T dr dh dr rc d r c dr dc c r c dr dc c dr dc c o z z z z - = = ) ( 2 q q q q q (1) We assume in this analysis that 0 ≈ dr ds and choose to design for 0 = dr dh o , i.e. constant work input (compressor) or output (turbine) per unit length of rotor blade. Thus we have 0 ) ( = dr rc d r c dr dc c z z q q , (2) which implies that the radial variations of c z and c r are coupled, if we want c r »0. Consider a compressor rotor and let us design our blade twist variations in the rotor (b 1 (r), b 2 (r)) such that: = - = r r b r r a r c r r b r r a r c m n m m n m ) ( ) ( 2 1 q q r m is the mean radius; a, b > 0. (3) The exponent n is a design choice. A similar set of equations can be used for a turbine rotor, by replacing subscript 1 with 3. Note that c 2q > c 1q for a compressor and c 2q > c 3q for a turbine. From Eqs. (3) we see that = - r r b r c r c m 2 ) ( ) ( 1 2 q q , so that ( ) ( 2 2 2 ) ( ) ( ) ( 1 2 r f bU r b r r b r r c r c r U h m m m o ≠ = Ω = Ω = - = ∆ l l l l q q . (4) Here Ω is the angular velocity of the rotor. We see that the choice of tangential velocity distribution (3) has guaranteed that ∆h o ≠f(r), i.e. 0 = dr dh o , for any a, b, n (provided the fluid follows the blades). Equation (4) determines b, provided ∆T o,stage , U m and l are known for the stage l l m stage o p m o U T c U h b 2 2 , ∆ = ∆ = . (5) For example, if ∆T o,stage ≈50K, c p ≈ 1000 J/kgK, U m ≈ 200 m/s, l»1, then b≈125m/s. Using 2 2 2 2 2 2 z z r c c c c c c = = q q for radial equilibrium, the degree of reaction for a compressor o z z o o o h c c h c c h r c r c h h h r R ∆ - - ∆ - - = ∆ - - = ∆ = ′ - 2 2 1 2 ) ( ) ( 1 ) ( 2 1 2 2 2 1 2 2 2 1 2 2 1 2 q q
Transcript of Designing rotor blades for radial equilibrium( crvarghesep/class/propulsion/Design for...Designing...

ASE 376K Propulsion
© Philip L. Varghese, UT Austin, 2001 1
Designing rotor blades for radial equilibrium(cr ≈ 0)
The radial equilibrium condition is:
drdsT
drdh
drrcd
rc
drdc
crc
drdc
cdrdc
c ozz
zz −=+=++
)(2θθθθ
θ (1)
We assume in this analysis that 0≈drds
and choose to design for 0=drdho , i.e. constant work
input (compressor) or output (turbine) per unit length of rotor blade. Thus we have
0)(
=+drrcd
rc
drdc
c zz
θθ , (2)
which implies that the radial variations of cz and cr are coupled, if we want cr≈0.
Consider a compressor rotor and let us design our blade twist variations in the rotor (β1(r), β2(r)) such that:
+
=
−
=
rrb
rrarc
rr
brr
arc
m
n
m
m
n
m
)(
)(
2
1
θ
θ
rm is the mean radius; a, b > 0. (3)
The exponent n is a design choice. A similar set of equations can be used for a turbine rotor, by replacing subscript 1 with 3. Note that c2θ > c1θ for a compressor and c2θ > c3θ for a turbine.
From Eqs. (3) we see that
=−
rr
brcrc m2)()( 12 θθ , so that
( ) )(222)()()( 12 rfbUrbrr
brrcrcrUh mmm
o ≠=Ω=Ω=−=∆ λλλλ θθ . (4)
Here Ω is the angular velocity of the rotor. We see that the choice of tangential velocity
distribution (3) has guaranteed that ∆ho ≠f(r), i.e. 0=drdho , for any a, b, n (provided the fluid
follows the blades). Equation (4) determines b, provided ∆To,stage, Um and λ are known for the stage
λλ m
stageop
m
o
U
Tc
Uh
b22
,∆=
∆= . (5)
For example, if ∆To,stage ≈50K, cp ≈ 1000 J/kgK, Um ≈ 200 m/s, λ≈1, then b≈125m/s.
Using 222222zzr cccccc +=++= θθ for radial equilibrium, the degree of reaction for a
compressor
o
zz
ooo hcc
hcc
hrcrc
h
hhrR
∆−
−∆−
−=∆−
− =∆
=′ −
221
2)()(
1 )(21
22
21
22
21
2212 θθ

ASE 376K Propulsion
© Philip L. Varghese, UT Austin, 2001 2
Because ))(( 12122
122 θθθθθθ cccccc +−=− and )( 12 θθλ ccUho −=∆ , we get
o
zz
hcc
Ucc
rR∆−
−+
−=′22
1)(21
2212
λθθ (6)
It is convenient to normalize by the mean radius rm and introduce a dimensionless variable
mrr
x ≡ in equation (3):
xb
axcxb
axc nn +=−= θθ 21 ; (3a)
so
112
22
2−==
+ n
mm
n
xUa
xUax
Ucc
λλλθθ . (7)
Now we need to determine cz(r), or equivalently cz(x), from the radial equilibrium condition (2).
( )
( )
( )∫
∫
∫∫
≡−=−
−=−
−=
r
rzmz
r
r
zmz
r
r
r
r
z
m
m
mm
drrcdrd
rc
IIcc
drrcdrd
rccc
drrcdrd
rc
drc
drd
θθ
θθ
θθ
;2
22
2
22
22
2
(8)
Using the definitions of c1θ, c2θ in Eq. (3a), it is easy to see that the integral I in Eq. (8) is
( )
( ) ( )
( ) 1;)ln(12
2
0;11ln
1,0;11
12
)1(
)1(
2
12
1
212
=
−=
=
−±=
≠
−
−−+=
+=
−
−−∫
nxbxa
a
nx
bxa
nxn
bx
na
na
dxbxaxnaI
nn
x nn
m
m
m
(9)
The distributions with n=0,±1 are often used. They are called exponential (n=0), free-vortex (n=−1), and first-power (n=1). Hill and Peterson (p. 335) refer to the case n=1 as “constant reaction” but we shall see that the degree of reaction is not constant in this case. (Note that Hill and Peterson define the distribution for rcθ, rather than cθ.) Since blades are made by numerical machining there is no reason to stay with integral n. Although it gives mathematicians fits, the cases n=0 and n=1 can be considered under the general case using n=ε, and n=1±ε respectively, where ε is a small number like 10-5
. The numerical result for the blade angles, degree of reaction,

ASE 376K Propulsion
© Philip L. Varghese, UT Austin, 2001 3
etc. computed using this approximation are the same (to better than 1%) as the exact mathematical results for these special cases, and the fluid does not follow the specified angles exactly anyway.
Then, confining ourselves to the general case, we get:
( ) ( )
( ) ( )
−
−−−+−=−
−
−+−+−=−
−
−
11
12
)1(2
11
12
)1(2
1222
21
1221
22
nnzmz
nnzmz
xn
bxnanacc
xn
bx
na
nacc (10)
Assuming that c1zm= c2zm= czm (common design practice), then
( )1)1()1(
4 121
22 −
−+
−=− −nzz x
nn
abcc
Using ∆ho = 2bUmλ, we obtain ( )1)1()1(
21
21
22 −
−+−=
∆− −n
mo
zz xnn
Ua
hcc
λ, so finally from Eq. (6)
)1(
)12(1)(1
−−−+=′
−
nnx
UaxR
n
mλ. (11)
At the mean radius (x=1, r=rm) mm
m Ua
nn
Ua
RRλλ
−=−
−−+=′≡′ 1
)1()12(
1)1( , so the second
constant in the velocity expression is determined from
)1( mm RUa ′−= λ (12)
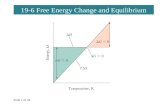
for all n. For mR′ ≈0.5, Um≈200 m/s, λ≈1, we have a≈100 m/s. In general R' increases with radius, so one has to choose mR′ sufficiently high that degree of reaction is not too low near the hub (problems of high adverse pressure gradient and flow separation near hub in stator). Conversely mR′ must not be so high that there is a high adverse pressure gradient and flow separation in the rotor near the tip. Examination of the figure shows why rotors commonly have relatively high hub-to-tip ratios, ζ, because this limits the variation in R' (and all other flow properties) from their mean radius values.
Special cases:
)1ln2)(1(11
21)1(10
1)1(11 2
−′−+=′=
−′−+=′=
′−−=′−=
xRRnx
RRn
xRRn
m
m
m
0.0
0.2
0.4
0.6
0.8
1.0
0.6 0.8 1.0 1.2 1.4
n=-1 (free vortex)n=0 (exponential)n=1 (first power)
Deg
ree
of r
eact
ion,
R'
x
R'm=0.6

ASE 376K Propulsion
© Philip L. Varghese, UT Austin, 2001 4
Examining Eq. (9) we see that for free-vortex blading (n=−1), the integral I is identically 0, so from Eq. (10) cz=czm for all x (or r). However in this case the degree of reaction falls quite rapidly for small x, and tends to go negative near the hub which limits the lower value of hub-to-tip ratio for the blade.
For a mean radius (rm) and hub-to-tip radius ratio ζ≡rh/rt, and designer’s choice for n, the values of mR′ , rotational speed (and thus Um), and stage stagnation temperature rise ∆To,stage are constrained by the need to maintain reasonable reaction at all radii, and limitations on the amount of turning that can be achieved in the rotor. These then determine the constants a and b. It must be remembered that while one can specify a flow turning angle in the rotor the flow will not necessarily follow the blade if the turning is too specified too high.