DC Motor drive.pdf
14
MODELING A DC MOTOR FOR SIMULATION WITH PSPICE 1. Equations for a separately excited dc motor The main equations for a dc motor whose speed is controlled by varying the armature voltage while the field current is kept constant are shown below. a a a a a a E dt dI L I R V + + = (1) m a K E Ω = φ (2) m m load elec B dt d J T T Ω + Ω + = (3) a e I K T φ = (4) Equation (1) represents the armature circuit, where V a , I a , R a , L a and E a are the average voltage applied to the armature, the average armature current, the armature resistance, the armature inductance and the induced emf in the armature ( speed voltage) respectively. The latter, as shown in (2), varies linearly with the motor speed ( Ω m ) given in rad/s if one assumes that the flux ( φ ) is constant, what is quite reasonable since the field current is kept constant. Equation (3) presents the dynamics of the mechanical part of the motor and load. It shows that the electrical torque ( T elec ) is equal to the load torque ( T load ) plus the inertial and the friction torques. The constants J and B are the moment of inertia (kgm 2 ) of the rotating masses and friction coefficient (Nms). As one can see in (4), the electrical torque is a function of the armature current. Example #1 - Steady-state characteristics of a dc drive Consider a separately excited dc motor supplied by a dc-dc step-down chopper. What is the chopper duty cycle so that one obtains a speed of 1000 rpm (104.72 rad/s)? The paramet ers of the ch opper, motor and load are as follo ws: - Chopper: Supply voltage of 440 V and switching frequency of 500 Hz.
-
Upload
hoang-viet -
Category
Documents
-
view
18 -
download
0
description
DC Motor drive
Transcript of DC Motor drive.pdf
-
MODELING A DC MOTOR FOR SIMULATION WITH PSPICE
1. Equations for a separately excited dc motor
The main equations for a dc motor whose speed is controlled by varying the
armature voltage while the field current is kept constant are shown below.
aa
aaaa EdtdI
LIRV ++= (1)
ma KE = (2)
mm
loadelec BdtdJTT ++= (3)
ae IKT = (4)
Equation (1) represents the armature circuit, where Va, Ia, Ra, La and Ea are the
average voltage applied to the armature, the average armature current, the armature
resistance, the armature inductance and the induced emf in the armature (speed voltage)
respectively. The latter, as shown in (2), varies linearly with the motor speed (m) given
in rad/s if one assumes that the flux () is constant, what is quite reasonable since the
field current is kept constant.
Equation (3) presents the dynamics of the mechanical part of the motor and load.
It shows that the electrical torque (Telec) is equal to the load torque (Tload) plus the inertial
and the friction torques. The constants J and B are the moment of inertia (kgm2) of the
rotating masses and friction coefficient (Nms). As one can see in (4), the electrical torque
is a function of the armature current.
Example #1 - Steady-state characteristics of a dc drive
Consider a separately excited dc motor supplied by a dc-dc step-down chopper. What is
the chopper duty cycle so that one obtains a speed of 1000 rpm (104.72 rad/s)? The
parameters of the chopper, motor and load are as follows:
- Chopper: Supply voltage of 440 V and switching frequency of 500 Hz.
-
- Motor: PShaft = 26 kW, Van = 400 V, Ian = 75 A, Ra = 0.432 , La = 5.53 mH
and n = 1800 rpm (188.5 rad/s). The friction torque is proportional to the
speed.
- Load: The load torque is proportional to the speed, absorbing a mechanical
power equal to the rated power of the motor at rated speed.
Solution:
The duty cycle of the chopper is calculated as:
? , 440 , 7.104_7.104_
7.104 === aSupplySupply
am VVVV
VD
? ?, , 7.104_7.104_7.104_7.104_7.104_ ==+= aaaaaa EIERIV
? ,7.104_7.104_ == KKE ma
The factor K is constant and is calculated for the rated condition. From (1) - (2):
Nm/A 95.1188.5
432.0 x 75400 ==
=mn
aanan RIVK
V 22.2047.104_ =aE
The armature current at the desired speed is calculated from (3) (4).
? ?, , 7.104_7.104_
7.104_7.104_7.104_7.104_ ==
+== fricload
fricloadeleca TTK
TTK
TI
Nm 6.76 Nm, 93.137 , 104.7_x_
x_ ==== load
n
nloadn
mn
mloadnload T
PTTT
The friction torque at rated speed is obtained from the power balance equation.
Nm 33.8 ,2x_
x_ =
==n
naanananfricn
mn
mfricnfric
PRIIVTTT
Nms 0.0442 Nm, 63.47.104_ ===
mn
fricnfric
TBT
AIa 66.4195.163.46.76
7.104_ =+
=
V 22.22222.2040.432 x 66.417.104_ =+=aV 0.50544022.222
7.104 ==mD
-
2. Creating a simplified model of a dc motor for PSpice simulations
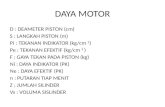
Figure 1 shows a model of a dc motor. It was implemented with basic blocks of
PSpice according to the equations that represent the dynamics of the machine. The
average value of the voltage applied to the armature winding can be controlled with a
simple VPULSE voltage source. The armature winding is modeled with a resistance, an
inductance and a Voltage Controlled Voltage Source, block E of PSpice. This models the
effect of the motor speed on the induced emf in the armature or speed voltage (Ea). The
gain of block E is the K factor of the motor.
The modeling of the armature winding is straightforward. The input voltage is the
sum of the voltage drops across the series impedance and speed voltage of the armature.
For the modeling of the mechanical part of the motor, one can represent the electrical
torque, by a Current Controlled Current Source, block F of PSpice. Thus, the other
torques should also be represented by currents that flow in parallel branches. The
magnitude of the voltage across the three branches is numerically equal to the speed of
the dc motor. Under this assumption, the friction torque can be emulated by a resistor
with a value that is equal to the inverse of the friction coefficient (B). The same idea
applies to the representation of the load torque when it is a function of the speed of the
motor. The inertial torque can be represented by a branch with a capacitor, since its value
depends on the variation of the speed of the motor. The value of the capacitor should be
equal to the moment of inertia of the rotating masses (J) in kgm2.
Fig. 1 Model of a dc motor using PSpice.
-
Figure 2 shows the transient response of the armature current and motor speed
during start-up with rated armature voltage and after the armature voltage is reduced to
222.22 V, that according to Example #1, should yield a motor speed of 104.72 rad/s. One
can see the large positive armature current during start-up and the negative armature
current that flows in the circuit when the armature voltage is decreased. In such a case, a
regenerative braking takes place and the machine works as a generator, converting kinetic
energy from the rotating masses
= 2
21 JEk into electrical energy that is sent to the
converter - dc bus that is feeding the machine.
Time
0s 0.2s 0.4s 0.6s 0.8s 1.0s 1.2s 1.4s 1.5sI(La)
-1.0KA
0A
1.0KA
SEL>>
(741.438m,75.403)
(783.475m,-261.746)
(32.988m,758.211)
V(wm_radps)0V
100V
200V
(1.4914,104.745)
(736.288m,188.431)
Fig. 2 Transient response for the system considering J = 1 kgm2.
A motor drive usually employs a main control loop, for regulating the speed of
the motor, and a secondary control loop that is intended to limit the current during start-
up or for avoiding overloading of the system. These systems are often of the cascade or
parallel types as shown in Figs. 3 and 4. In the cascade case, one designs first the inner
(current) loop and then the outer (speed) loop, with a lower crossover frequency. Note
that the reference for the current is the output of the speed controller and is limited to a
safe value by a limiter. In the parallel configuration, the two control loops are designed
-
independently. A commutation system, with OR logic based on diodes, selects the output
signal of the controller with lower magnitude to be the PWM modulating signal.
Fig. 3 Cascaded control loops.
Fig. 4 Parallel control loops.
3. Transfer functions of a drive system for a dc motor
The following transfer functions can be derived for a dc motor.
++
+
+
=
1 111
)()(
mamaa
a sssJL
KsVs
(5)
++
+
+
+
=
1 111
1
)()(
mamaa
m
a
a
sssL
s
sVsI
(6)
-
where: ( )21
and ,
K
JRBJ
RL a
mma
aa === .
Considering that the dynamics of the motor and load are much slower than the
dynamics of a step-down dc-dc converter, the latter and its PWM modulator can be
modeled by a simple gain ST
Supply
cont
achop V
VsV
sVsG )()()( == .
)(sVcont is the control or modulating voltage of the PWM and is the peak
value of the carrier waveform, usually a ramp or sawtooth, which presents a minimum
value equal to zero.
STV
In order to measure the motor speed, a dc tachometer with a rated input to output
relationship of 188.5 rad/s to 10 V is used. It can be represented by a gain
A current transducer is also required in the drive. Considering that the
time constant of the armature (
( .053.0)( = sH )
a) is much bigger than the switching period of the dc-dc
converter (T), no signal filters are required and the current transducer can be modeled by
a simple gain ( ).1.0)( =sHi
-
4 Design of the controller for the Current Loop
The uncompensated loop transfer function for the current loop, including the
PWM modulator, the converter, the motor and the current sensor is given by
i
mamaa
m
ST
Supply
cont
meaa KsssL
s
V
VsV
sI
++
+
+
+
=
1
_
111
1
)()(
(7)
The frequency response of the loop transfer function considering J = 1 kgm2 is
20 log TFPIAn.
freqn0.1 1 10 100 1 103 1 104
40
20
0
20
40
arg TFPIAn rtd.
freqn0.1 1 10 100 1 103 1 104
100
50
0
50
100
Fig. 5 - Bode Diagram of the loop transfer function for current (MATHCAD).
For a crossover frequency of 46 Hz (289 rad/s) one calculates the gain as 8.4 dB
and the phase as 74.88 . In order to achieve a phase margin of 45 with a type 2
controller, the k factor and the frequencies of the zero and pole are calculated from:
oo 88.2990 =+= TFPIApmboost (8)
-
73.12
45tan =
+= boostk o (9)
rad/s 500 and rad/s 167 ==== cpc
z kk
(10)
The dc gain of the controller (Kci) can be calculated as the opposite of the gain of
the partially compensated (Kci = 1) loop transfer function at the crossover frequency. In
MATHCAD it was calculated as 35.92 dB, yielding Kci = 62.5. The Bode plot of the
controller and compensated loop transfer function are shown in Fig. 6.
Fig. 6 - Bode Diagram of the current controller and compensated loop transfer function.
The simulation with PSpice to verify the dynamic performance of the controller
was carried out with the schematics shown in Fig. 7, that resulted in the waveforms
shown in Fig. 8. There one sees that in the start-up the armature current is limited to 150
A and is kept in this value for some time. The motor speed increases slowly due to the
limited current and electrical torque. The duty cycle increases slowly and become equal
to 1 at t = 0.95 s. From this point on, the motor speed, and the speed voltage (Ea), reach a
-
certain level, decreasing the current. Nothing can be done to keep it at 150 A, since the
duty cycle has already reached its maximum level. This positive error makes the output
voltage of the controller (Vc) increase more and more. At 1.2 s, when the reference
current is decreased, the output voltage of the controller starts do decrease, but since its
value is too high, it is not able to reduce the duty cycle of the main switch
instantaneously. One sees that the duty cycle remains equal to 1 up to 2 s. This could be
avoided by using an anti-windup integrator whose output would not increase indefinitely.
Fig. 7 - Schematics diagram of the closed loop current control of the dc motor.
-
Fig. 8 Waveforms for the dc motor operating with closed loop current control: (a)
Output voltage of the controller; (b) Duty cycle of the main switch; (c) Motor speed and
(d) Reference voltage for the current and feedback current signal (Ki = 0.1).
5 Design of the controller for the Speed Loop
The uncompensated loop transfer function for the speed loop, including the PWM
modulator, the converter, the motor and the speed sensor (tachometer) is given by
++
+
+
= K
sssJL
KV
VsVs
mamaa
ST
Supply
cont
mea
1 111
)(
)(
(11)
The frequency response of the loop transfer function considering J = 1 kgm2 is
-
20 log TFPW n.
freqn0.1 1 10 100 1 103 1 104
150
100
50
0
50
arg TFPW n rtd.
freqn0.1 1 10 100 1 103 1 104
200
150
100
50
0
Fig. 9 - Bode Diagram of the speed loop transfer function (MATHCAD).
For a crossover frequency of 5.4 Hz (33.9 rad/s) one calculates the gain as -10.34
dB and the phase as 96 . In order to achieve a phase margin of 45 with a type 2
controller, the boost angle, the k factor and the frequencies of the zero and pole are
calculated using (8-10) as 51, 2.82, 12 rad/s and 95.7 rad/s respectively,
The dc gain of the controller (Kc) can be calculated as the opposite of the gain of
the partially compensated (Kc = 1) loop transfer function at the crossover frequency.
In MATHCAD it was calculated as 36.05 dB, yielding Kc = 66. The Bode plot of the
controller and compensated loop transfer function are shown in Fig. 10.
-
Fig. 10 - Bode Diagram of the speed controller and compensated loop transfer function.
The simulation with PSpice to verify the dynamic performance of the controller
was carried out with the schematics shown in Fig. 11, that resulted in the waveforms
shown in Fig. 12. There one sees that the start-up is done with duty cycle equal to 1, so
the armature current and motor speed evolve as if there was no converter. During the
interval the reference speed was higher than the motor speed, the output of the controller
kept rising, reaching high values. This way, when the actual speed exceeds the reference
and the duty cycle should be reduced, it is not because the output of the controller that is
decreasing, still implies a duty cycle equal to 1. Again an anti-windup integrator should
be used. After this transient, the motor speed finally reaches the steady state value with
zero error. At t = 1.2 s the speed reference is increased with a step change and one can
see that the transient to this small signal variation is good, with a small overshoot due to
the 45 phase margin. It could be reduced with a controller designed for a bigger phase
margin. Observe that the output voltage of the controller and duty cycle do not saturate.
-
Fig. 11 - Schematics diagram of the closed loop speed control of the dc motor.
Fig. 12 Waveforms for the dc motor operating with closed loop speed control: (a)
Armature current; (b) Output of the speed controller (c) Duty cycle of the main switch
and (d) Reference voltage for the speed and feedback speed signal (K = 0.053).
-
6 Speed and current loops in parallel
Example #1 - Steady-state characteristics of a dc drive