d m - users · “momento di inerzia ... guscio cilindrico sottile di raggio R I =mR 2 ... In...
27
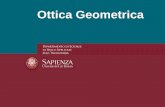
O dm r v ϖ ϑ(t) z ϕ R ϑ dϑ ds = Rdϑ asse di rotazione Moto di rotazione di un corpo rigido intorno ad un asse fisso : y U.Gasparini, Fisica I 1 x Vettore velocità angolare ϖ : vettore tale che per un qualsiasi punto P del corpo individuato dal vettore posizione r rispetto a un polo O sull’asse di rotazione, la velocità di P è data da: v ≡ ϖ × r - - ϖ ϖ ϖ è diretto lungo l’asse di rotazione - il verso di ϖ ϖ ϖ è dato dalla “regola della mano destra” ϖ ϑ ≡ d t dt ( ) v ds dt R d dt r r = = = ≡ × ϑ ϕϖ ϖ sin r r
Transcript of d m - users · “momento di inerzia ... guscio cilindrico sottile di raggio R I =mR 2 ... In...

O
d m
r
v
ω
ϑ(t)
z
ϕ
R
ϑ
dϑ
ds= Rdϑ
asse di rotazione
Moto di rotazionedi un corpo rigido intorno ad un asse fisso :
y
U.Gasparini, Fisica I 1
x
Vettore velocità angolare ω :vettore tale che per un qualsiasi punto Pdel corpo individuato dal vettore posizione rrispetto a un polo O sull’asse di rotazione, la velocità di Pè data da:
v ≡ ω × r
-
- ωωωω è diretto lungo l’asse di rotazione- il versodi ωωωω è dato dalla “regola della mano destra”
ω ϑ≡ d t
d t
( )
vd s
d tR
d
d tr r= = = ≡ ×
ϑ ϕ ω ωs i nr r

Dato un polo O sull’assedi rotazione z , la componente di LO lungo l’asse z:
L IO zz= ω
“momento di inerzia” del corpo rispetto all’asse z :
I R d mz
C o r p o
≡ ∫ 2
distanza dall’asse zdell’elemento dm
zCorpo
Oz dmvrL
×≡ ∫
rr
è data da:
Momento angolareper un moto di rotazione intorno ad un asse :
v
z
R
ω
U.Gasparini, Fisica I 2
Contributo(infinitesimo) di dm almomento angolare totale LO
d L r v d mO
v r r≡ ×
d L r v d mR
R d mO = =s i n ϕ
ω
ϕωϕ
ϕπsin
sin)
2cos(
2
dmR
dLdL OOz =−=
Integrando su tutto il corpo:
ωωω zOzOz IdmRdmRdLL ==== ∫∫∫22
≡ I z
dmRdL Oz2ω=
O
d m
r
v
ϕ
R
dLO
π/2−ϕ

[ ]I K g mz = ⋅ 2Dimensioni del momento d’inerzia:Il momento d’inerzia dipendedalla forma geometrica del corpo, dalla sua distribuzione di massa (densità) e dall’asse considerato;
non èuna proprietà intrinseca del corpo
Momento di inerzia
Esempio:momento d’inerziadi un asta omogeneadi lunghezza e massa M:l
i) rispetto ad un asse perpendicolare passante per un suo estremo:
lz
xR dm
I R d m x d xz
C o r p o
≡ = =∫ ∫2 2
0
3
3λ
λl
l
IM
z =l
2
3densità lineare
l
l/M=λii) rispetto ad un asse perpendicolare passanteper il suo centro di massa :
xR dm
I x d xz ≡ =∫22
2 42
0
2 3
λλ
l
l/
IM
z = l2
1 2
z
G
2/l

ii) Momento d’inerzia di un disco omogeneodi raggio R e massa M rispettoall’asse
Esempi di calcolo di momenti di inerzia
i) Momento d’inerzia di un anello omogeneodi spessore trascurabile, raggio R e massa Mrispettoall’asse perpendicolare al piano dell’anello passante per il suo centro di massa G:
222 MRdmRdmRIanelloanello
z G==≡ ∫∫
R Gdm
∫∫ =≡R
Corpo
z rdrrdmrIG
0
22 2 πσ
σ π≡ M R/ 2
4
22
4
0
3 Rdrr
R πσπσ ∫ ==
ii) Momento d’inerzia di un disco omogeneodi raggio R e massa M rispettoall’asse perpendicolare al disco passante per il suo centro di massa:
z
R
G
d m d S r d r= =σ σ π2
r
densità superficiale:
dr
IM R
z G=
2
2

Esempi di calcolo di momenti di inerzia (2)
iii) Momento d’inerzia di una sfera omogeneadi raggio R e massa M :
z r z R z( ) = −2 2 disco di massa dM(z), momento d’inerzia dI(z)
d M z d V r z d z( ) ( )= =ρ ρ π 2
dzρ π= M R/
4 3r z d M z( ) ( )= =
2
U.Gasparini, Fisica I 5
R z
I d I z R z d zG
s f e r a
R
= = −∫ ∫( ) ( )21
22 2 2
0
ρ π
= − +
=ρ π ρ πR RR
R5 55
52
3 5
8
1 5 I M RG = 2
52
ρ π= M R/4
33
d I zr z d M z
( )( ) ( )
= =2
2
= = −1
2
1
24 2 2 2ρ π ρ πr z d z R z d z( ) ( )
= − +R R z z4 2 2 42

Momenti di inerzia (3)
anello di raggio R
2mRI =R
disco di raggio R
2
2
1mRI =
U.Gasparini, Fisica I 6
guscio cilindricosottile di raggio R
2mRI =
cilindro pienodi raggio R
2
2
1mRI =
In generale 2λ= mI
doveλ è detto “raggio rotatore”

Momenti di inerzia (4)
R R2
3
2mRI = 2
5
2mRI =
guscio sfericosottile di raggio R
sfera pienadi raggio R
U.Gasparini, Fisica I 7
2
12
1lmI = ( )22
12
1bamI +=
a
b
asta sottiledi lunghezza d
lastra
l
2λ= mI

Teorema di Huygens-Steiner (o “degli assi paralleli”) : I I M dz z C M
= +'2
momento d’inerzia rispettoall’asse z’// z e passante per il CM
massa totaledel corpo
distanza tra z e z’
z
y, y’
z’
G
RR’
dm
P = (x,y,z,) = (x’,y’,z’)
Teorema di Huygens-Steiner
U.Gasparini, Fisica I 8
dx x’
I R d m x y d m
x y d d m x y y d d d m
z
C o r p o C o r p o
C o r p o C o r p o
≡ = + =
= + + = + + +
∫ ∫
∫ ∫
2 2 2
2 2 2 2 22
( )
[ ' ( ' ) ] [ ' ' ' ]
= R’2
= + + = +∫ ∫ ∫R d m d y d m d d m I M dC o r p o C o r p o C o r p o
z C M' ' '
2 2 22
I z C M' ≡ ≡y C M' 0 = M
x x
y y d
== +
'
'

G
z z’
dm
I I M d
MM
M
z z C M= + =
= +
=
'2
2 2 2
1 2 2 3
l l l
i )
ii) Momento d’inerzia di un disco omogeneodi massa M e raggio R rispetto ad un asse ad esso perpendicolarepassante per un punto P sul suo bordo:
z z’
P d = R G
I I M d
M RM R
M R
z zP C M= + =
= + =
'2
22
2
2
3
2
Esempi di applicazione del teorema di Steiner :
2/l=d
(cfr. slide n.3)
U.Gasparini, Fisica I 9
P d = R G M R= + =2 2
IM R
z P= 3
2
2
⇒
Si noti che:un disco che ruoti senza strisciare (“puro rotolamento” ) compie una rotazione intorno all’asse istantaneo passante per il punto di contatto col piano di appoggio
P
ωωωω
vGG
z

Il teorema del momento angolare (“ 2a equazione cardinale” della dinamica):
d L
d tM v M vO
OE
O G
rr r r
= − ×( )
momento totaledelleforze esternerispetto al polo O
velocità del polo O nel sistema di riferimento inerziale nel quale i Punti materiale hanno le velocità vche entrano nella definizione di LO : r r r
L r v d mO
C o r p o
= ×∫
massa totale del sistema
Teorema del momento angolare per un corpo rigido
U.Gasparini, Fisica I
C o r p o∫
d L
d tMO
OE
rr
= ( )
per un corpo rigido in rotazioneintorno ad un asse fisso z ( vO= 0) :
può essere riformulato utilizzando il concetto di momento d’inerzia.
accelerazioneangolare :
α ω( )
( )t
d t
d t≡
z
O
ω
αzE
Oz IM =)( ( in formale analogiacon lalegge di Newton: r r
F m a= )
)()( EOzz
zOz Mdt
dI
dt
Id
dt
dL === ωωProiettando tale equazione lungo l’asse di rotazione:

M IOE
zz
( ) = α
è formalmente analoga alla 2a legge della dinamica per un punto materiale, con lesostituzini:
forza risultante F ⇔ momento delle forze esterne M
accelerazione a ⇔ accelerazione angolare αmassa m ⇔ momento d’inerzia Iz rispetto all’asse
di rotazione z
Equazione fondamentale della dinamica delle rotazioni:
L’ equazione fondamentale della dinamica delle rotazioni:
z
Esempio :porta in rotazioneintorno ai suoi
U.Gasparini, Fisica I 11
α = =
→
M
I
O P F
IO
z z
z
zO IMdt
tdt /
)()(
rr
r=≡ ωα
F
OPO
P
z
ω(t)
ω(t+dt)OP × F
intorno ai suoicardini
MO =
forza agente sullamaniglia
F
OPO Pαααα
MO
stessa forza
braccio minore
minoreaccelerazioneangolare

y
xz O
mg
OG
G⊗⊗⊗⊗r r
M O G m gO = ×→
)(sin thmgM ϑ−=
h
Φreazione vincolare(non ha momento rispetto ad O )
“Pendolo composto”
y
x
z
piano di oscillazione(x,y) O
mg
G
MOϑ
Oggetto vincolato ad oscillare in un piano verticale intorno ad un asse passante per un punto di sospensione O non coincidente con il suo centro di massa
U.Gasparini, Fisica I 12
mg )(sin thmgM Oz ϑ−=
d t
d t
m g h
It
z
2
20
ϑ ϑ( )( )+ =
Per piccole oscillazioni(sin ϑ ≈ ϑ ) :
Introducendo la“lunghezza ridotta” del pendolo composto:
l ≡I
m hz
Proiezione della 2a eq.cardinale lungo l’asse z:
αzE
Oz IM =)( − =m g h t Id t
d tzs i n ( )( )
ϑϑ2
2
d t
d t
gt
2
20
ϑ ϑ( )( )+ =
l
≡ ω 2
Soluzione : moto armonico
ϑ ϑ ω ϕ( ) s i n ( )t t= +0

y
z
O
mg
Gh
h’ z’
asse di rotazione
“asse di oscillazione”:asse parallelo all’asse dirotazione, passante per ilpunto O’ a distanza ≡ lunghezza ridotta
“Assi reciproci”di un pendolo composto:
piano di oscillazione(x,y)
O’
Ol Ol
“assi reciproci”
U.Gasparini, Fisica I
mg(≡ lunghezza ridotta ) dal punto di sospensione O lungo la retta OG
I periodi di oscillazione intorno agli assi z e z’ (“assi reciproci”) sono uguali. Infatti:
l Oz G GI
m h
I m h
m h
I
m hh≡ =
+= +
2
I m h m hG O= −l2
ll
Oz G OI
m h
I m h
m h
m h m h m h
m h''
'
'
'
'
'≡ =
+=
− +=
2 2 2
≡ +h h '
= + − + = + = +h h h h h
h
h h h
hh h
2 2 2' '
'
' ( ' )
'' l lO O' =
'
'OO
gg
ll≡=≡ ωω
O O
La lunghezza ridotta per leoscillazioni intorno ad O’ è:

O
OO’
O’m 1
m 1
m 2 m 2
Massemobili
punti di sospensione(fissi)
“Pendolo reversibile” (o “ pendolo di Kater”) :
Ol
U.Gasparini, Fisica I 14
O’
ω π≡ =
2
T
g
Olω π
'' '
≡ =2
T
g
Ol
le masse m1 ed m2 vengono spostate finchè i periodi dioscillazione intorno ad O e O’ sono gli stessi; in tale situazione
la distanza OO’, determinabile con elevata precisione (∆l/l ≈10-3 )è la lunghezza ridotta del pendolo composto
⇒ si ottengono misure di g = ω 2l
∆ g
g≅ −1 0 6
di analoga precisione :

Per un corpo rigido in rotazione con velocità angolare ωωωω intorno ad un asse z :
d m
v
ωϑ(t)
z
R
dϑ
asse di rotazione
ds=Rdϑϑϑϑ
vd s
d tR
d
d tR≡ = =ϑ ω
Energia cineticadi un corpo rigido in rotazione
U.Gasparini, Fisica I
E v d m R d m R d mk
c o r p o c o r p o c o r p o
≡ = =∫ ∫ ∫1
2
1
2
1
22 2 2 2( )ω ω
≡ I zE v dm Ik
corpo
z≡ =∫1
2
1
22 2ω
⇒
Analogia formale con l’espressione dell’energia cinetica di un punto materiale:
E Ik z= 1
22ωE m vk = 1
22
m
v
I z
ω
⇔
⇔⇔

Il moto generico di un corpo rigidoè, in un dato istante, riconducibile ad un moto roto-traslatorio, sovrapposizione di un moto di traslazione del centro di massacon velocità vG e di un moto di rotazione con velocità angolare ω intorno ad un asse istantaneo di rotazione passante per il centro di massa:
v G
ω
Teorema di Koenigper l’energia cinetica di un corpo rigido
U.Gasparini, Fisica I16
E M v v d mk G
c o r p o
= + ∫1
2
1
22 2r
'
In generale, sia il modulo che la direzione di ωωωω variano istante per istante.
G
E M v Ik G G= +1
2
1
22 2r ω
momento d’inerzia rispetto all’asseistantaneo di rotazione passante per G
Teorema di Koenigper l’energia cinetica di un corpo rigido:

Il teorema di Koenig per un corpo rigido puo’ essere ricavato dal teorema di Huygens-Steiner :
z z’ω
dG
vG = ωd
Energia cinetica di un corpo rigido
vG
U.Gasparini, Fisica I 17
corpo in rotazione intorno all’asse fisso z
E I I M d I M dk z z z= = + = +1
2
1
2
1
2
1
22 2 2 2 2ω ω ω ω( ) ( )' '
vG
222' 2
1'
2
1
2
1GkGzk MvEMvIE +=+= ω
t. di Huygens-Steiner

∆ E E E Wk kf
ki
i fE≡ − = →
( )
lavoro delle soleforze esternePer un corpo rigido,il lavoro infinitesimo dW(I) delle forze interne è nullo:
dm j
dm
rr j k
Teorema dell’energia cineticaper un corpo rigido:
U.Gasparini, Fisica I 18
d W F d r F d r
F d r F d r F d r
Ij
Ijj j kk jj j
( ) ( )
. . . . . . .
≡ ⋅ =
⋅ =
= ⋅ + ⋅ + ⋅ + =
∑ ∑∑ ≠
r r r r
r r r r r r1 2 1 1 3 1 2 1 2
= ⋅ − + ⋅ − + =
= ⋅ − + ⋅ − + = ⋅ =≠∑∑
r r r r r r
r r r r r r r r
F d r d r F d r d r
F d r r F d r r F d rj k j kk j
j
1 2 1 2 1 3 1 3
1 2 1 2 1 3 1 3 0
( ) ( ) . . . .
( ) ( ) . . . .
≡ 0poichè in un corpo rigido le distanze relative rjk rimangono invariate
dmkj k

Corpo soggetto alla forza peso: moto del centro di massa e conservazione del momento angolare
GE amR
rr=
Gamgmrr = gaG
rr =
dt
LdM GE
G
rr
== 0
== ωGG IL costante
velocita’angolarepiccola velocita’
angolare
U.Gasparini, Fisica I 19
G LG
angolaregrande

Esempi di conservazione del momento angolare
ωi ωf
velocita’angolaregrande
velocita’angolarepiccola
U.Gasparini, Fisica I 20

Conservazione del momento angolare (2)
U.Gasparini, Fisica I21

Equazioni della statica e condizioni di equilibrio
0
0
=
=E
E
M
Rr
r
Le condizioni di equilibrio di un corpo rigido (o di un sistema dicorpi) sono :
(si noti che essendo 0=ERr
il momento risultante EMr
non dipendedalpolo considerato)
U.Gasparini, Fisica I 22
non dipendedalpolo considerato)
In queste condizioni un corpo persevera nel suo stato di quiete o di moto,
sia per quel che riguarda le traslazioni (moto del suo CM: aCM= 0) sia perle rotazioni (LO=costante, accelerazione angolareα = 0 ).
Altrimenti di “equilibrio dinamico” (ad esempio: una ruota che rotola convelocita’ angolare costante su un piano orizzontale privo di attritoe’ in una condizione di equilibrio dinamico).
Se il corpo e’ inizialmente in quiete, si parla di“equilibrio statico”.

Equilibrio statico stabile
Una posizione diequilibriostatico si dice “stabile” se per un minimospostamento del corpo si sviluppano forze esterne e /o momenti non equilibratiche tendono a riportare il sistema nella posizione di equilibrio.
Esempi:Fel
U.Gasparini, Fisica I 23
mg posizione “di riposo”della molla
mg
Punto di sospensionedi un pendolo composto
direzioneverticale
G
O
Quando le forzeche si sviluppanosonoconservative, il punto di equilibriostabile e’ il punto nel qualeil sistemaassume il minimo valore possibiledella sua energia potenziale.

Equilibrio statico instabile e indifferente
Una posizione diequilibriostatico si dice “instabile” se per un minimospostamento del corpo si sviluppano forze esterne e /o momenti non erquilibrati chetendono ad allontanare ulteriormente il sistemadalla posizione di equilibrio.
mgPunto di sospensionedi un pendolopostoal di sotto
direzioneverticale
G
Il puntodi equilibrio instabile
U.Gasparini, Fisica I 24
mgpostoal di sottodel CM
O
Una posizione diequilibriostatico si dice “indifferente” se per un minimospostamento del corpo non si sviluppano forze esterne e /o momenti, nonequilibrati, e quindi la nuova posizione raggiunta e’ ancora di equilibrio
Esempio:oggetto su un pianoinclinato scabro, con coeff.di attrito staticoµS> tanθ
θ
Il puntodi equilibrio instabilecorrisponde ad un massimodell’ energia potenziale del sistema

Equazioni della statica
Nei problemi di statica, la soluzione delle equazioni di equilibrio determinale reazioni vincolari, in generale incognite, che si sviluppano sul sistemae che contribuiscono , con le altre forze e momenti noti agenti sul sistema(ad esempio: forze peso), all’ equilibrio del sistema stesso.
Applicate a parti del sistema, le equazioni della statica danno informazioni anchesulleforze che vengono a svilupparsi internamente alla struttura(ad esempio: le forzetra le arcatedi un ponte).
U.Gasparini, Fisica I 25
le forzetra le arcatedi un ponte).
Esempio:
A B
T
Reazioni vincolari del pavimentosulla base di una scala;forza di trazioneT (“interna”) che si sviluppa sulla “traversina” CDdella scala stessa
C DFA
FB

z
Esempio di applicazione delle equazioni della statica
U.Gasparini, Fisica I 26
0== yyuRRrr
0=−− MgLmgDTd0== zOzO uMMrr
0=−−− FMgmgT sistema di 2 equazioni con 2 incognite: F e T
NdMLmDgT 648/)( =+=NMgmgTF 560=−−=

reazioni vincolari
Una scala da pompieri, lunga L=12me con massa m=45 kg, è appoggiata ad una parete verticale. Il punto di appoggio è ad un’altezza h = 9.3 m dalsuolo. Il CM si trova ad un terzo della lunghezza. Un uomo, di massa M=72 kgsi arrampica sulla scala fino a che ilsuo centro di massa si trova a metà dellascala. La parete è liscia e il terreno scabro.Quale forze esercitano sulla scala la parete
θ
Esempio di applicazione delle eq. della statica (2)
U.Gasparini, Fisica I 27
0=+= yyxx uRuRRrrr
0=−= fFR wx
0=−−= mgMgNRy
0== zzOO uMMrr
attrito02.39)/arccos( == Lhθ
023 =−θ+θ= hFsin)/L(Mgsin)/L(mgM wz
Quale forze esercitano sulla scala la parete e il terreno?
sistema di 3 equazioni con 3 incognite: N,Fw,f fNMmmg
MmhLmgFW
==+==+=
410]2/3/[tan
]2/3/)[/(sin
θθ
NgmMN 1147)( =+=