Control Systems (ECE411) Lectures 11 & 12 11... · 2016. 10. 17. · State-Space Representation...
18
State-Space Representation Analysis of Control Systems Control Systems (ECE411) Lectures 11 & 12 M.R. Azimi, Professor Department of Electrical and Computer Engineering Colorado State University Fall 2016 M.R. Azimi Control Systems
Transcript of Control Systems (ECE411) Lectures 11 & 12 11... · 2016. 10. 17. · State-Space Representation...

State-Space Representation Analysis of Control Systems
Control Systems (ECE411)Lectures 11 & 12
M.R. Azimi, Professor
Department of Electrical and Computer EngineeringColorado State University
Fall 2016
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
State-Space Representation: Solution
Remark: For a diagonal (parallel) state space formulation where
A =
λ1 0. . .
0 λn
,
the state transition matrix can easily be formed using
φ(t) =
eλ1t 0. . .
0 eλnt
This is because φ(t) = L −1{(sI −A)−1} =
1
s−λ1 0. . .
0 1s−λn
This result can directly be used without any proofs for diagonal state spacerepresentations. An example is given next.
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
State-Space Representation: Solution
Example for diagonal case: Given an LTI system:
x(t) =
[−1 00 −2
]x(t) +
[11
]u(t) x(0) =
[10
]y(t) =
[3 1
]u(t) = us(t)
Find (a) φ(t), (b) h(t), (c) yh(t), and (d) yp(t)
Part a: From the Remark above φ(t) =
[e−t 00 e−2t
]Part b: For h(t), we use
h(t) = Cφ(t)B =[3 1
] [e−t 00 e−2t
] [11
]h(t) = (3e−t + e−2t), ∀t ≥ 0
Part c: For yh(t), we use
yh(t) = cφ(t)x(0) =[3 1
] [e−t 00 e−2t
] [11
]yh(t) = 3e−t, ∀t ≥ 0 M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
State-Space Representation: Solution
Part d: For yp(t) for a unit step input, we use
yp(t) = L −1{H(s)U(s)}
H(s) = C(sI −A)−1B =[3 1
] [ 1s+1 0
0 1s+2
] [11
]=[
3s+1
1s+2
] [11
]= 3
s+1 + 1s+2 = 4s+7
(s+1)(s+2)
Yp(s) = H(s)U(s) = 4s+7s(s+1)(s+2)
yp(t) = 72 − 3e−t − 1
2e−2t ∀t ≥ 0
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
Characteristic Equation and Eigenvalues of Matrix A
Recall, for an LTI system described by nth order differential equation,
n∑i=0
aidiy(t)
dti=
m∑j=0
bjdjx(t)
dtj, a0 = 1, m < n
transfer function is
H(s) =bms
m + bm−1sm−1 + · · ·+ b0
sn + an−1sn−1 + · · ·+ a0=B(s)
ρ(s)
Characteristic Equation: ρ(s) = sn + an−1 + · · ·+ a0 = 0That is roots of ρ(s) are poles of H(s).
On the other hand, for the same LTI represented by state-space equations weknow that (d = 0 assume strictly proper case),
H(s) = C(sI −A)−1B = C[Adj(sI−A)]Bdet(sI−A)
which implies that Characteristic equation: ρ(s) = det(sI −A) = |sI −A|.But roots of |sI −A| = 0 are the eigenvalues of matrix A.Thus, eigenvalues of A are poles of H(s).
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
Characteristic Equation and Eigenvalues of Matrix A-Cont.
Remark:
For PVCF, the coefficients of ρ(s) are elements of last row of A with negativesign:
A =
0 1 0. . .
. . .
0 0 1−a0 −a1 · · · −an
,
ρ(s) = sn + an−1sn−1 + · · ·+ a0 = 0
Additionally, if d = 0 i.e. strictly proper case the transfer function can easily beformed using
H(s) = C
1s...
sn−1
1
ρ(s)=
C︷ ︸︸ ︷[b0 · · · bn−1]
1s...
sn−1
1
ρ(s)=bn−1s
n−1 + · · ·+ b0ρ(s)
i.e without using the direct approach H(s) = C(sI −A)−1B.M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
Characteristic Equation and Eigenvalues of Matrix A-Cont.
Let λi be an eigenvalue of matrix A (i.e. roots of |λI −A| = 0), then thecorresponding eigenvectors are obtained using λipi = Ap
i, where p
iis the
eigenvector associated with λi.
λipi = Ai
That is, matrix P = [p1, . . . , p
n] formed of all these eigenvectors diagonalizes
matrix A,
PΛ = AP =⇒ Λ = P−1AP
where Λ is a diagonal matrix containing all the eigenvalues of A,
Λ =
λ1 0. . .
0 λn
Example: Find eigenvalues and eigenvectors of matrix A =
[3 11 3
].
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
For eigenvalues, we use
|λI −A| =∣∣∣∣λ− 3 −1−1 λ− 3
∣∣∣∣ = 0
λ2 − 6λ+ 8 = 0⇒ λ1 = 2, λ2 = 4
For eigenvector p1, we use
λ1p1 = Ap1
Let p1
=
[α1
α2
], =⇒ 2
[α1
α2
]=
[3 11 3
] [α1
α2
]=⇒
{2α1 = 3α1 + α2
2α2 = α1 + 3α2
=⇒ −α1 = α2
Pick: α1 = 1, α2 = −1 =⇒ p1
=
[1−1
]Similarly for p
2using λ2p2 = Ap
2gives =⇒ p
2=
[11
]Thus, the diagonalizing matrix is P =
[1 1−1 1
], and Λ =
[2 00 4
]It is simple to verify that P−1AP = Λ.
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
State-Space Representation
Similarity Transformations
For a given transfer function, H(s), state-space representation is not unique,and there are infinite possible representations that are related to each other vianon-singular similarity transformations.
Consider:x(t) = Ax(t) +Bu(t)y(t) = Cx(t) + du(t)
Let T be a nonsingular matrix (i.e. T is invertible). Define:x(t) = Tz(t), or z(t) = T−1x(t), where z(t) is the new transformed statevector. Now, substituting for x(t) in the state equations,{
T z(t) = ATz(t) +Bu(t)
y(t) = CTz(t) + du(t)=⇒
{z(t) = T−1ATz(t) + T−1Bu(t)
y(t) = CTz(t) + du(t)
which is a new set of state equations with z(t) as the state vector andA = T−1AT C = CTB = T−1B d = d
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
State-Space Representation: Similarity Transformations
Then: {z(t) = Az(t) + Bu(t)
y(t) = Cz(t) + du(t)
Now, since one can find infinite nonsingular matrices T s, there will be infinite
state-space representation for the same system. However, they all have thesame transfer function.Invariance Theorem: H(s) of an LTI system is invariant under similaritytransformation.Proof: That is, we need to show that H(s) = H(s) where H(s) is the transferfunction of the above mapped state space system with z(t) as the state vector.But,
H(s) = C(sI − A)−1B + d
where A, B, C, and d were defined before. Using the expressions for these andmatrix inversion property (PQ)−1 = Q−1P−1, we get
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
State-Space Representation: Similarity Transformations
H(s) = CT (sI − T−1AT )−1T−1B + d
= CT ((sT −AT ))−1B + d
= C(sI −A)−1B + d = H(s)
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
Time-Domain Analysis
Time-domain analysis involves studying the behavior of the control system forsome useful reference signals such as unit step (due to instantaneous change att = 0) or unit ramp (due to linear increase with time). This entails studying (a)Steady-state behavior; and (b) Transient behavior of the system.
Assume you are the pilot of an F-22 fighter jet.
Desired Specs:1 Fast response / rise time2 Good relative stability (small overshoot)3 Accuracy (low steady-state error)4 Less sensitivity5 Noise immunity
These specs cannot be met at the same time (trade-off).M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
Time-Domain Analysis-Cont.
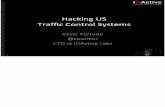
Consider a closed-loop control system
The response c(t) to a unit step input generally,c(t) = ctr(t)︸ ︷︷ ︸
transient
+ css(t)︸ ︷︷ ︸steaty-state
Transient Response: Part of the response that goes to zero when t goes toinfinity, i.e. limt→∞ ctr(t)→ 0.Steady-State Response: Part of the response that remains well-behaved orconstant when t goes to infinity, i.e.limt→∞ c(t) = css(t)
where css(t) is constant or a well-behaved function of time. Here, we typicallydeal with the former case i.e. css a constant.
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
Steady-State Analysis
Steady-state analysis is used to determine the accuracy of the system infollowing the reference signal. Types of inputs typically used are: step, ramp.
Since c(t) and r(t) cannot be directly compared (when H(s) 6= 1) we caninstead compare f(t) and r(t) or study the steady-state behavior of the errorsignale(t) = r(t)− f(t)
Then using the Final Value Theorem (FVT),
ess = limt→∞
e(t) = lims→0
sE(s)
where E(s) = L {e(t)} .
Note: To use FVT, sE(s) should not have poles on the jω axis or in RHS ofs-plane.E(s) = R(s)− F (s) = R(s)− C(s)H(s) = R(s)−G(s)H(s)E(s)
=⇒ E(s) =R(s)
1 +G(s)H(s)
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
Steady-State Analysis-Cont.
Thus, we have
ess = lims→0
sR(s)
1 +G(s)H(s)
As can be seen the steady-state error ess depends of (a) the input signal R(s)and the type of loop transfer function G(s)H(s). More specifically, the LoopTransfer Function is said to be Type j if
G(s)H(s) =K(1 + α1s) · · · (1 + αMs)
sj(s+ βs) · · · (1 + βNs)
sj represents j consecutive integral operations in the loop.
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
Steady-State Error Analysis
(a) Steady-State Error Due to Step Input:
Let r(t) = Rus(t) =⇒ R(s) = Rs
ess = lims→0
sE(s) = lims→0
sR(s)
1 +G(s)H(s)= lims→0
R
1 +G(s)H(s)
=R
1 + lims→0G(s)H(s)=
R
1 +Kp
where Kp = lims→0G(s)H(s) is called Step Error Constant .
To achieve ess = 0, we need Kp →∞, which in turn requireslims→0G(s)H(s)→∞.
If the system is:Type 0: Kp = K =⇒ ess = R
1+K 6= 0Type 1 or Higher: Kp →∞ =⇒ ess → 0
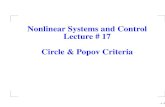
Thus, for ess = 0 we need a Type 1 or higher system. If G(s)H(s) is not Type1, using an integral controller can make it a Type 1. See figure next page.
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
Steady-State Error Analysis-Cont.
This is called a Proportional Integrator (PI).
Note: Adding an integrator introduces a lag, so you need a differentiator tocompensate (PID controller).
(b) Steady-State Error Due to Ramp Input:
Let r(t) = Rtus(t) =⇒ R(s) = Rs2
M.R. Azimi Control Systems

State-Space Representation Analysis of Control Systems
Steady-State Error Analysis-Cont.
ess = lims→0
sE(s) = lims→0
R
s+ sG(s)H(s)=
R
Kv
Kv = lims→0
sG(s)H(s)
where Kv is called the ramp error constant.
To achieve ess = 0, we need Kv →∞, which in turn requires Type 2 or highersystem (j ≥ 2).
Type 0: Kv = 0 =⇒ ess →∞Type 1: Kv = constant =⇒ ess = R
Kv
Type 2 or Higher: Kv →∞ =⇒ ess → 0
M.R. Azimi Control Systems