Newtonian Program Analysis - Foundations of Software Reliability
Upload
duongquynhCategory
view
216download
2
Chapter 1 Foundations of Elliptic Boundary ValueProblems
1.1 Euler equations of variational problems
Elliptic boundary value problems often occur as the Euler equations ofvariational problems the latter representing the optimality conditionsof minimization problems.
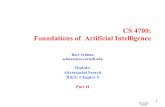
As a simple example let us consider the computation of the stationaryequilibrium of a clamped membrane (cf. Figure 1).
2
u(x1,x2)
x
f dxx1
Figure 1: Deflection of a clamped membrane
A membrane is a surfacic, in its ground state plane, elastic body, whosepotential energy is directly proportional to the change of the surfacearea. Thus, the ground state can be described by a bounded domainΩ ⊂ lR2 with boundary Γ = ∂Ω which we assume to be piecewisesmooth.Under the influence of a force with density f = f(x), x ∈ Ω, which actsperpendicular to the (x1, x2)-plane, the membrane is deflected in the x3
direction. The deflection will be described by a function u = u(x1, x2).Since the membrane is clamped at its boundary Γ, there is no deflectionfor x ∈ Γ, i.e., we have u(x1, x2) = 0, x = (x1, x2) ∈ Γ.The equilibrium state is characterized as the physical state, wherethe total energy of the membrane attains its minimum. The totalenergy J = J(u) consists of the potential energy J = Jp and the
1

2 Ronald H.W. Hoppe
energy J = Jf associated with the exterior force f according to
(1.1) J = Jp − Jf .
As said before, the potential energy is proportional to the change insurface area ∫
Ω
(1 + |∇u|2)1/2 dx −∫
Ω
dx ,
where ∇u := (∂u/∂x1, ∂u/∂x2).If we restrict ourselves to small deflections, i.e., |∇u| ¿ 1, we obtain∫
Ω
(1 + |∇u|2)1/2 dx =
∫
Ω
dx +1
2
∫
Ω
|∇u|2 dx + o(|∇u|2) .
This results in
(1.2) Jp(u) =µ
2
∫
Ω
|∇u|2 dx ,
where the quantity µ > 0 ia a material constant that reflects the elasticresponse of the membrane.On the other hand, we have
(1.3) Jf (u) =
∫
Ω
fu dx .
Consequently, using (1.2) and (1.3) in (1.1) yields
(1.4) J(u) =1
2
∫
Ω
|∇u|2 dx−∫
Ω
fu dx .
We refer to L2(Ω) as the Hilbert space of square integrable functionswith the inner product
(u, v)0,Ω :=
∫
Ω
uv dx .
We equip the function space C10(Ω) with the inner product
(u, v)1,Ω :=
∫
Ω
uv dx +
∫
Ω
∇u · ∇v dx .
However, the space V := (C10(Ω) | ‖ · ‖1,Ω) is not complete. We denote
its completion with respect to the ‖·‖1,Ω-norm by H10 (Ω). (A systematic
introduction to Sobolev spaces will be provided in Chapter 2).Assuming f ∈ L2(Ω), the determination of the stationary state of thedeflected membrane amounts to the solution of the unconstrained

Finite Element Methods 3
minimization problem:Find u ∈ H1
0 (Ω) such that
(1.5) J(u) = infv∈H1
0 (Ω)J(v) .
Minimization problems such as (1.5) can be shown to admit a uniquesolution under more general assumptions. We assume V to be a Hilbertspace with inner product (·, ·)V and consider a functional J : V → lR :=[−∞, +∞].
Definition 1.1 Lower semicontinuous functionals
A functional J : V → lR is called lower semicontinuous [weaklylower semicontinuous] at u ∈ V , if for any sequence (un)n∈lN suchthat
un → u (n →∞) [un u (n ∈ lN)]
there holds
J(u) ≤ lim infn→∞
J(un) .
Example 1.2. Examples of lower semicontinuous functionals
(i) Let V := lR and
J(v) :=
+1 , v < 0−1 , v ≥ 0
.
Then J is lower semicontinuous on lR.
(ii) Let K ⊂ V be a closed, convex set. Then, the indicator functionof K as given by
IK(v) :=
0 , v ∈ K
+∞ , v /∈ K
is lower semicontinuous on V .
Lemma 1.3 [[1]] Properties of convex sets
Assume that K ⊂ V is a closed, convex set. Then K is weakly closed.
Definition 1.4 Proper convex functionals
We recall that a functional J : V → lR is called convex, if for allu, v ∈ V and λ ∈ [0, 1] there holds
J(λu + (1− λ)v) ≤ λJ(u) + (1− λ)J(v) ,
provided the right-hand side in the above inequality is well-defined.A convex functional J : V → lR is said to be proper convex, if

4 Ronald H.W. Hoppe
J(v) > −∞, v ∈ V, and J 6= +∞.A convex functional J : V → lR is called strictly convex, if
J(λu + (1− λ)v) < λJ(u) + (1− λ)J(v)
for all u, v ∈ V, u 6= v, and λ ∈ (0, 1).
Lemma 1.5 [[1]] Properties of convex functionals
Assume that J : V → lR is a lower semicontinuous, convex functional.Then J is weakly lower semicontinuous.
Definition 1.6 Coercive functionals
A functional J : V → lR is said to be coercive, if
J(v) → +∞ for ‖v‖V → +∞ .
Theorem 1.7 Solvability of minimization problems
Suppose that J : V → (−∞, +∞], J 6= +∞, is a weakly semicon-tinuous, coercive functional. Then, the unconstrained minimizationproblem
J(u) = infv∈V
J(v)(1.6)
admits a solution u ∈ V .
Proof. Let c := infv∈V J(v) and assume that (vn)n∈lN is a minimizingsequence, i.e., J(vn) → c (n →∞).Since c < +∞ and in view of the coercivity of J , the sequence (vn)n∈lN
is bounded. Consequently, there exist a subsequence N ′ ⊂ lN andu ∈ V such that vn u (n ∈ lN′). The weak lower semicontinuity ofJ implies
J(u) ≤ infn∈lN′
J(vn) = c ,
whence J(u) = c.•
Theorem 1.8 Existence and uniqueness
Suppose that J : V → lR is a proper convex, lower semicontinuous,coercive functional. Then, the unconstrained minimization problem(1.6) has a solution u ∈ V .If J is strictly convex, then the solution is unique.
Proof. In view of Lemma 1.5 the existence follows from Theorem 1.7.For the proof of the uniqueness let u1 6= u2 be two different solutions.

Finite Element Methods 5
Then there holds
J(1
2(u1 + u2) <
1
2J(u1) +
1
2J(u2) = inf
v∈VJ(v) ,
which is a contradiction.•
We recall that in the finite dimensional case V = lRn, a necessary opti-mality condition for (1.6) is that∇J(u) = 0, provided J is continuouslydifferentiable. This can be easily generalized to the infinite dimensionalcase.
Definition 1.9 Gateaux-Differentiability
A functional J : V → lR is called Gateaux-differentiable in u ∈ V ,if
J ′(u; v) = limλ→0+
J(u + λv)− J(u)
λ
exists for all v ∈ V . J ′(u; v) is said to be the Gateaux-variation ofJ in u ∈ V with respect to v ∈ V .Moreover, if there exists J ′(u) ∈ V ∗ such that
J ′(u; v) = J ′(u)(v) = < J ′(u), v >V ∗,V , v ∈ V ,
then J ′(u) is called the Gateaux-derivative of J in u ∈ V .
Theorem 1.10 Necessary optimality condition
Assume that J : V → lR is Gateaux-differentiable in u ∈ V withGateaux-derivative J ′(u) ∈ V ∗. Then, the variational equation
< J ′(u), v >V ∗,V = 0 , v ∈ V(1.7)
is a necessary condition for u ∈ V to be a minimizer of J .If J is convex, then this condition is also sufficient.
Proof. Let u ∈ V be a minimizer of J . Then, there holds
J(u± λv) ≥ J(u) , λ > 0 , v ∈ V ,
whence
< J ′(u),±v >V ∗,V ≥ 0 , v ∈ V ,
and thus
< J ′(u), v >V ∗,V = 0 , v ∈ V .
If J is convex and (1.7) holds true, then
J(u + λ(v − u)) = J(λv + (1− λ)u) ≤ λJ(v) + (1− λ)J(u) ,

6 Ronald H.W. Hoppe
and hence,
0 = < J ′(u), v − u >V ′,V = limλ→0∗
J(u + λ(v − u))− J(u)
λ≤
≤ J(v)− J(u) .
•Exercise 1.11 Application to the membrane problem
Show that the membrane problem (1.5) has a unique solution u ∈H1
0 (Ω) that is the solution of the variational equation
µ
∫
Ω
∇u · ∇v dx =
∫
Ω
fv dx , v ∈ H10 (Ω) .(1.8)
Let us assume that f ∈ C(Ω) and that the solution u ∈ H10 (Ω) of (1.8)
has the regularity property u ∈ C2(Ω) ∩ C0(Ω). Then, Green’sformula∫
Ω
u∂v
∂xi
dx = −∫
Ω
∂v
∂xi
v dx +
∫
Γ
niuv dσ , 1 ≤ i ≤ 2 ,
where n := (n1, n2)T is the exterior unit normal vector, yields∫
Ω
∇u ∇v dx = −∫
Ω
∆uv dx +
∫
Γ
∂u
∂nv dσ
︸ ︷︷ ︸= 0
.
Consequently, (1.8) can be written as∫
Ω
(−µ∆u − f) v dx = 0 , v ∈ H10 (Ω) .(1.9)
Since (1.9) holds true for all v ∈ H10 (Ω), we conclude that
−µ ∆u(x) = f(x) f.f.a. x ∈ Ω .
By continuity, we find that u satisfies the boundary value problem
−µ ∆u(x) = f(x) , x ∈ Ω ,(1.10)
u(x) = 0 , x ∈ Γ .
Definition 1.10 Euler equation
The boundary value problem (1.10) is referred to as the Euler equa-tion associated with the minimization problem (1.5).

Finite Element Methods 7
1.2 Existence and uniqueness results for variationalequations
In this section, we are concerned with a fundamental existence anduniqueness result for variational equations in a Hilbert space setting.We assume that V is a Hilbert space with inner product (·, ·)V andassociated norm ‖·‖V and we refer to V ∗ as its algebraic and topologicaldual. Given a bilinear form a(·, ·) : V ×V → lR and an element ` ∈ V ∗,i.e., a bounded linear functional on V , we consider the variationalequation:Find u ∈ V such that
(1.11) a(u, v) = `(v) , v ∈ V .
Definition 1.11 Bounded bilinear forms
A bilinear form a(·, ·) : V × V → lR is said to be bounded, if thereexists a constant C ≥ 0 such that
(1.12) |a(u, v)| ≤ C ‖u‖V ‖v‖V , u, v ∈ V .
Definition 1.12 V -elliptic bilinear forms
A bilinear form a(·, ·) : V ×V → lR is called V - elliptic, if there existsa constant α > 0 such that
(1.13) |a(u, u)| ≥ α ‖u‖2V , u ∈ V .
The following celebrated Lemma of Lax-Milgram is one the funda-mental principles of the finite element analysis and states an existenceand uniqueness result for variational equations of the form (1.11).
Theorem 1.11 Lemma of Lax-Milgram
Let V be a Hilbert space with dual V ∗ and assume that a(·, ·) : V ×V → lR is a bounded, V -elliptic bilinear form and ` ∈ V ∗. Then, thevariational equation (1.11) admits a unique solution u ∈ V .
Proof. We denote by A : V → V ∗ the operator associated with thebilinear form, i.e.,
(1.14) Au(v) = a(u, v) , u, v ∈ V .
We note that A is a bounded linear operator, since in view of (1.12)
‖Au‖V ∗ = supv 6=0
|Au(v)|‖v‖V
≤ C ‖u‖V .

8 Ronald H.W. Hoppe
and hence,
‖A‖ = supu6=0
‖Au‖V ∗
‖u‖V
≤ C .
In order to state the variational equation (1.11) as an operator equationin V , we further consider a lifting from V ∗ to V provided by the Rieszmap
τ : V ∗ → V
` 7−→ τ` ,
given by
(1.15) `(v) = (τ`, v)V , v ∈ V .
It is easy to verify that the Riesz map is an isometry, i.e.,
(1.16) ‖τ`‖V = ‖`‖V ∗ , ` ∈ V ∗ .
In terms of the Riesz map, the variational equation (1.11) can be equiv-alently written as the operator equation
(1.17) τ(Au− `) = 0 .
We prove the existence and uniqueness of a solution of (1.17) by anapplication of the Banach fixed point theorem. to this end weintroduce the map
T : V → V(1.18)
Tv := v − ρ (τ(Av − `)) , ρ > 0 .
Obviously, u ∈ V is a solution of (1.17) if and only if u ∈ V is a fixedpoint of the operator T . To prove existence and uniqueness of a fixedpoint in V , we have to show that the operator T is a contraction onV , i.e., there exists a constant 0 ≤ q < 1 such that
‖Tv1 − Tv2‖V ≤ q ‖v1 − v2‖V , v1, v2 ∈ V .(1.19)
Indeed, setting w := v1 − v2 we have
‖Tw‖2V = ‖w − ρ τ Aw‖2
V =
= ‖w‖2 − 2 ρ (τAw, w)V︸ ︷︷ ︸= a(w,w)
+ ρ2 ‖τAw‖2V︸ ︷︷ ︸
= ‖Aw‖2V ∗
≤
≤(1 − 2 ρ α + ρ2 C2
)‖w‖2
V .
Clearly, we have(1 − 2 ρ α + ρ2 C2
)< 1 ⇐⇒ ρ <
2 α
C2,

Finite Element Methods 9
which gives the assertion.•
1.3 The Ritz-Galerkin method
In general, we cannot access the solution of the variational equation(1.11) analytically. Therefore, we have to resort to numerical meth-ods. A widely used approach is the so-called Ritz-Galerkin method,where we are looking for an approximate solution in a suitable fi-nite dimensional subspace of Vh ⊂ V :Find uh ∈ Vh such that
(1.20) a(uh, vh) = `(vh) , vh ∈ Vh .
If a(·, ·) is a bounded, V -elliptic bilinear form, then the Lemma of Lax-Milgram tells us that (1.20) admits a unique solution uh ∈ Vh.The appropriate choice of Vh is dominated by two important issuesthat will be the focus of our analysis in the subsequent chapters:
• Construction of Vh such that the linear algebraic systemrepresented by (1.20) can be efficiently solved.
• Estimation of the global discretization error u− uh.
The first issue crucially hinges on the proper selection of a basis of thefinite dimensional subspace Vh:
(1.21) Vh = span ϕ1, ..., ϕnh , dim Vh = nh .
We may represent the solution uh as a linear combination of the basisfunctions according to
(1.22) uh =
nh∑j=1
αj ϕj .
Obviously, (1.20) is satisfied for any vh ∈ Vh if and only if it holdstrue for all basis functions ϕi,
≤ i ≤ nh. Therefore, inserting (1.21) into(1.20) and choosing vh = ϕi, i = 1, ..., nh, we see that indeed (1.20)corresponds to the linear algebraic system
(1.23)
nh∑j=1
a(ϕj, ϕi) αj = `(ϕi) , 1 ≤ i ≤ nh .
Motivated by applications in structural mechanics, we define:
Definition 1.13 Stiffness matrix and load vector
The matrix Ah = (aij)nhi,j=1 with entries
(1.24) aij := a(ϕj, ϕi) , 1 ≤ i, j ≤ nh .

10 Ronald H.W. Hoppe
is called the stiffness matrix and the vector bh = (b1, ..., bnh)T with
components
(1.25) bi := `(ϕi) , 1 ≤ i ≤ nh
is referred to as the load vector.
The unknowns in (1.23) are the coefficients αi, 1 ≤ i ≤ nh which con-stitute the solution vector αh = (α1, ..., αnh
)T .In summary, the linear algebraic system (1.23) can be concisely writtenas
(1.26) Ahαh = bh .
The second issue about the accuracy of the Ritz-Galerkin approachcan be answered by an important orthogonality property of the errorwhich is called Galerkin orthogonality.
Lemma 1.6 Galerkin orthogonality
Under the assumptions of the Lax-Milgram Lemma, let u ∈ V anduh ∈ Vh be the unique solutions of (1.11) and (1.20), respectively.Then, there holds
(1.27) a(u− uh, vh) = 0 , vh ∈ Vh .
Proof. Since Vh ⊂ V , (1.11) also holds true for all vh ∈ Vh. Subtrac-tion of (1.20) from (1.11) gives the assertion.
Remark 1.1 Elliptic projection
The Galerkin orthogonality has an immediate and helpful geometricinterpretation. If we additionally assume that the bilinear form a(·, ·)is symmetric, it defines an inner product on V . Then, (1.27) tells usthat uh ∈ Vh is the projection of u ∈ V onto Vh. Since a(·, ·) is V -elliptic, uh ∈ Vh is said to be the elliptic projection of u ∈ V ontoVh.
In lights of the preceding remark, we expect the error u − uh in thenorm ‖ · ‖V to be related to the best approximation of the solutionu ∈ V by an element in Vh.This holds true in the general case and is the result of another funda-mental tool in the finite element analysis, the Lemma of Cea:
Theorem 1.12 Lemma of Cea
Under the assumptions of the Lemma of Lax-Milgram let u ∈ V anduh ∈ Vh be the unique solutions of (1.11) and (1.20), respectively.Then, there holds
(1.28) ‖u− uh‖V ≤ C
αinf
vh∈Vh
‖u− vh‖V .

Finite Element Methods 11
Proof. Taking the V -ellipticity and the boundedness of a(·, ·) as wellas the Galerkin orthogonality (1.27) into account, for any vh ∈ Vh wehave
α ‖u− uh‖2V ≤ a(u− uh, u− uh) =
= a(u− uh, u− vh) + a(u− uh, vh − uh)︸ ︷︷ ︸= 0
≤
≤ C ‖u− uh‖V ‖u− vh‖V ,
which proves (1.28).•
References
[1] Hiriart-Urruty, J. and Lemarechal, C. (1993). Convex Analysis and Minimiza-tion Algorithms. Springer, Berlin-Heidelberg-New York