Brushless DC-Servomotor 96 mNm - microprivod.ru · omwld nt Eo ag imesD 322 68 ... The signal level...
6
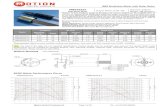
Volt Ω W % rpm A mNm mNm mNm/rpm rpm/V mV/rpm mNm/A A/mNm rpm/mNm µH ms gcm 2 ·10 3 rad/s 2 K/W s °C N N N mm mm g rpm mNm A 3268 ... BX4 CS/CC 24 1,45 29,8 77,3 5 200 0,203 346 1,7 1,3 . 10 -3 220 4,555 43,5 0,0230 7,3 110 4,6 60 58 1,9 / 9,6 17 / 1 060 – 20 ... +100 50 5 50 0,015 0 460 5 - 6 500 58 / 96 1,60 / 2,65 3268 G 024 BX4 CS/CC 96 mNm 30/1, 32A, 32/3, 32/3 S, 38/1, 38/1 S, 38/2, 38/2 S 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 UN R P2 max. η max. no Io MH Co Cv kn kE kM kI ∆n/∆M L τ m J α max. Rth 1 /Rth 2 τ w1 / τ w2 ≤ = ne max. Me max. Ie max. M [mNm] n [rpm] 20 60 80 100 120 40 0 3268...BX4 CS/CC 3268...BX4 CS/CC (Rth2 -55%, 2 000 0 6 000 4 000 8 000 Watt 45 35 25 15 Edition 2011 – 2012 Brushless DC-Servomotor with integrated Motion Controller and RS232 or CAN interface For combination with Gearheads: Recommended values - mathematically independent of each other Nominal voltage Terminal resistance, phase-phase Output power 1) Efficiency No-load speed No-load current 3) Stall torque at 8A Friction torque, static Friction torque, dynamic Speed constant Back-EMF constant Torque constant Current constant Slope of n-M curve Terminal inductance, phase-phase Mechanical time constant Rotor inertia Angular acceleration Thermal resistance Thermal time constant Operating temperature range Shaft bearings Shaft load max.: – radial at 3 000 rpm (4,5 mm from mounting flange) – axial at 3 000 rpm – axial at standstill Shaft play: – radial – axial Housing material Weight Direction of rotation Speed up to Torque up to 1) 2) Current up to 1) 2) 3) 1) at 4 000 rpm 2) thermal resistance Rth 2 not reduced / thermal resistance Rth 2 by 55% reduced 3) total standby current 0,08 A ball bearings, preloaded stainless steel electronically reversible Recommended areas for continuous operation Note: The diagram indicates the maximum speed in relation to the available torque at the output shaft for a given ambient temperature of 22°C. The motor can provide more power with adequate cooling (for ex. Rth2 reduction of –55%). The maximum available torque and speed will be reduced if the ambient temperature is higher than 22°C and / or the motor is thermally insulated to the ambient environment. The characteristics of the curve diagram is determined by Ub and the control characteristics of the integrated Motion Controller. Un factory preset) For notes on technical data and lifetime performance refer to “Technical Information”. © DR. FRITZ FAULHABER GMBH & CO. KG Specifications subject to change without notice. Page 1/6
Transcript of Brushless DC-Servomotor 96 mNm - microprivod.ru · omwld nt Eo ag imesD 322 68 ... The signal level...

VoltΩW%rpmAmNmmNmmNm/rpm
rpm/VmV/rpmmNm/AA/mNmrpm/mNmµHmsgcm2
·103rad/s2
K/Ws
°C
NNN
mmmm
g
rpmmNmA
3268 ... BX4 CS/CC 24 1,45 29,8 77,3
5200 0,203 346 1,7 1,3.10-3
220 4,555 43,5 0,0230
7,3 110 4,6 60 58
1,9/9,617/1060
–20...+100
50550
0,0150
460
5-6500 58/96 1,60/2,65
3268 G 024 BX4 CS/CC
96mNm
30/1,32A,32/3,32/3S,38/1,38/1S,38/2,38/2S
1 2 3 4
5 6 7 8 9
10111213
1415161718
1920
21
2223
24
252627
282930
UN
RP2max.
ηmax.
no
Io
MH
Co
Cv
kn
kE
kM
kI
∆n/∆MLτm
Jαmax.
Rth1/Rth2
τw1/τw2
≤=
nemax.
Memax.
Iemax.
M [mNm]
n [rpm]
20 60 80 100 120400
3268...BX4 CS/CC
3268...BX4 CS/CC (Rth2 -55%,
2 000
0
6 000
4 000
8 000
Watt45352515
Edition 2011 – 2012
Brushless DC-ServomotorwithintegratedMotionControllerandRS232orCANinterface
For combination with Gearheads:
Recommended values -mathematicallyindependentofeachother
NominalvoltageTerminalresistance,phase-phaseOutputpower1)
Efficiency
No-loadspeedNo-loadcurrent3)
Stalltorqueat8AFrictiontorque,staticFrictiontorque,dynamic
SpeedconstantBack-EMFconstantTorqueconstantCurrentconstant
Slopeofn-McurveTerminalinductance,phase-phaseMechanicaltimeconstantRotorinertiaAngularacceleration
ThermalresistanceThermaltimeconstant
Operatingtemperaturerange
ShaftbearingsShaftloadmax.:–radialat3000rpm(4,5mmfrommountingflange)
–axialat3000rpm–axialatstandstillShaftplay:–radial–axial
HousingmaterialWeightDirectionofrotation
SpeeduptoTorqueupto1)2)
Currentupto1)2)3)
1)at4000rpm2)thermalresistanceRth2notreduced/thermalresistanceRth2by55%reduced3)totalstandbycurrent0,08A
ballbearings,preloaded
stainlesssteel
electronicallyreversible
Recommended areas for continuous operation
Note:
The diagram indicates the maximumspeedinrelationtotheavailabletorqueattheoutputshaftforagivenambienttemperatureof22°C.
Themotorcanprovidemorepowerwithadequatecooling(forex.Rth2reductionof–55%).
Themaximumavailabletorqueandspeedwillbereducediftheambienttemperatureis higher than 22°C and/or the motoris thermally insulated to the ambientenvironment.
ThecharacteristicsofthecurvediagramisdeterminedbyUbandthecontrolcharacteristicsoftheintegratedMotionController.
Un
factorypreset)
Fornotesontechnicaldataandlifetimeperformancereferto“TechnicalInformation”.
©DR.FRITZFAULHABERGMBH&CO.KGSpecificationssubjecttochangewithoutnotice.
Page1/6

Dimensional drawing
3268 ... BX4 CS/CC
A Aø0,060,02
ø32 ±0,1
1,5 -0,05
0
-0,05ø160
-0,010ø5-0,006
±0,313
30°±5
4M36xAø0,2
ø22
40 ±0,3
54 ±0,3
20
25,8 ±1,5
89,8 ±2,5
Edition 2011 – 2012
UB
I max.
f max.
f max.
UB
12 ... 30 8 3
±10 100 ... 2 000
0 5 400 400
max. UB / 30 mA 100
22
12 ... 30
200 3 000
V DCA
VHzrpmkkHzkHz
k
kV DC
µs
For notes on technical data and lifetime performance refer to “Technical Information”.
© DR. FRITZ FAULHABER GMBH & CO. KGSpecifications subject to change without notice.
Page 2/6
Options
Accessories
Adapter board (Part No.: 6501.00065)
Full product description
Example:
3268G024 BX4 CS (RS232 interface)
3268G024 BX4 CC (CAN interface)
Supply voltage 1)
Peak current 2)
Input/output
Connection "Analog input": – Speed command analog input voltage range– Speed command PWM input frequency range pulse duty factor 50%– Digital input input resistance (at 24V)– External encoder – Step frequency input
Connection "Fault output":– Fault output no error switched to GND – Digital output open collector– Digital input input resistance
Connection "3.input":– Digital input input resistance– Electronic supply voltage 1)
Encoder:– Scanning rate– Resolution internal encoder Inc./turn The signal level of the digital inputs can be set using the above commands:Standard (PLC): Low 0...7,0V / High 12,5V...UB, TTL: Low 0...0,5V / High 3,5V...UB
1) Separate supply of motor and control electronics for safetyrelevant applications is optionally available (Option no. 2993). In this case the 3rd input is not available for digital signals; connection 3.2) Preset value. Can be changed over the interface.
Motion Controller
scale reduced
Orientation with respect to connecting cable 30° ±5°
Caution: be sure to connect motor supply terminals to the correct polarity.Motor electronics are protected against polarity reversal by an internal fuse. In case of damage due to polarity reversal, this internal fuse can only be replaced at the factory.
Connection
PVC-cable, 8-conductors AWG 24Conneting cable 1 meter
deep Wires Functionblue GNDpink + 24 Vbrown Analog inputwhite Fault outputgrey Analog GNDyellow RS232 RXD / CAN_Lgreen RS232 TXD / CAN_Hred Connection No. 3

Edition 2011 – 2012
MotionManager
Connection diagram
For notes on technical data and lifetime performance refer to “Technical Information”.
© DR. FRITZ FAULHABER GMBH & CO. KGSpecifications subject to change without notice.
Page 3/6
MC Function / RS232General description
PC witch RS232 interface
RS232 zero modem cable
Adapter for encoder (optional)
DC-Micromotor with encoder
Motion Controller
Adapter (optional)
Brushless or Linear DC-Servomotor with Hall sensors
Or
Or Brushless DC-Servomotor with integrated Motion Controller
FAULHABER Motion Controllers are available as external electronic controls to be used in combination with DC-Micromotors, Brushless DC-Servomotors and Linear DC-Servomotors or, if already integrated, with Brushless DC-Servomotors in the form of motion control systems. Motion control is thus possible for the majority of motors from a diameter of 6 mm upward. The integrated systems reduce the amount of space required. At the same time, their wiring requirements are minimal, which helps to simplify installation.
Operating modes Speed control
PI speed control, even for demanding synchronization requirements Positioning
For moving to defined positions with a high level of resolution. With a PD Controller, the dynamic response can be adjusted to suit the application. Reference and limit switches are evaluated by means of various homing modes.
Speed profiles Acceleration ramps, deceleration ramps and maximum velocity can also be defined for each section. As a result, even complex profiles can be implemented quickly and effectively.
Current control Protects the drive by limiting the motor current to the set peak current. The current is limited to the continuous current by the integrated I²t monitoring if required.
Protective functions - Protection against ESD - Overload protection for the electronic circuitry and the motor - Self-protection against overheating - Overvoltage protection in generator mode Extended operating modes - Stepper motor mode - Gearing mode - Position control to analog set point - Operation as servo amplifier in voltage adjuster mode - Torque/force controller using variable set current input
Interfaces - Discrete I/O Setpoint input
Depending on the operating mode, setpoints can be input via the serial port, via an analog voltage value, a PWM signal or a quadrature signal.
Error output (Open Collector) This can also be used as a digital input for the evaluation of reference switches or for specifying direction of rotation. RS232 interface
For connection to a PC with a transmission rate of up to 115 kbaud. The information can be stored in the integrated memory (FLASH).
The interface also offers the option of querying online operating data and values. The RS232 interface also allows the operation of several networked drives on one control.
Sensor interfaces (position and speed sensors, depending on motor type) Analog Hall signals
Three analog Hall signals, offset by 120°, for motor position and speed in the case of Brushless DC-Motors and Linear DC-Servomotors
Incremental encoders Incremental encoders for motor position and speed in the case of DC-Micromotors and as additional sensors for Brushless DC-Motors
Absolute encoders Serial SSI port for motor position and speed matching Brushless DC-Servomotors with an AES Encoder
RS232 Programming / ConfigurationAn extensive ASCII command set is available for programming and operation. This can be preset from the PC, e.g. via any Windows terminal program or via any other control computer.In addition, even complex processes can be created from these com-mands and stored in the drive. Once programmed as a stepper motor, electronic gear or as a speed or position controller via the analogue input, the drive can be operated independently of the RS232 interface."Faulhaber Motion Manager" software is available for Windows operating systems. It considerably simplifies operation and configura-tion and also enables graphic online analysis of the operating data.OptionsSeparate supply of power to the motor and electronic actuator is optional (important for safety-relevant applications), in which case no third input is required. Depending on the controller, additional programming adaptors and connection aids are available. The modes and parameters can be specially preconfigured on requestNotesMotion Controllers and Motion Control Systems are accompanied by a device manual for installation and putting into operation. A communication and function manual and the "Faulhaber Motion Manager" software are available on request and on the Internet at www.faulhaber.com.

Edition 2011 – 2012
MOSFET Phase A Phase B Phase C
A
I 2 t
R S
GND
RS232
+ 24V DC
U B
2,7k
LED
PC TXD
PC RXD
GND
n soll
n ist
RXD
TXD
I ist
RS232
PWM
+ _
AGND ϕ(t)
Δϕ
U a
B
C
10k
{
+ 24V DC2,7k
LEDV4 V6
MOSFET
UB
M7
M8
M5
M3M4
M6GND
AB
RS
IistI 2 t
PWM
ϕ(t)
Ua
RS232
nsoll
nist
RXD
TXD
AGND
V8
V5
M1M2
V3
V2V1
PC RXDPC TXD
GND
RS232
10k
2,2k VCC
2,2k+5V
GND
V7
{
+ 24V DC2,7k
LEDV4 V6
MOSFET
UB
M8
M1
M2M5M6
M4GND
AB
RS
IistI 2 t
ϕ(t)
Ua
RS232
nsoll
nist
RXD
TXD
AGND
V8
V5V3
V2V1
PC RXDPC TXD
GND
RS232
10k
GND
V7
Δϕ
C
M3
M7ABC
VCC+5V{ Communication
and configurationsmodule
Protection:OvertemperatureCurrent limitOvervoltage
PI-Speedcontroller
Speedcalculation Position
calculation
Currentlimiting
Faultoutput
Analoginput
Commandposition
Input 3Example:Limit switch
Positioncontroller
5V-Control
Poweramplifier
Evaluationinput 3
Evaluationlimit switch
SignalMicro Controller
PhasePhasePhase
Hall sensorHall sensorHall sensor
orangebrown
yellow
bluegreen
grey
red
black
3 PhasePWMSine wavecommutator
Brushless Motor
For notes on technical data and lifetime performance refer to “Technical Information”.
© DR. FRITZ FAULHABER GMBH & CO. KGSpecifications subject to change without notice.
Page 4/6
Position control DC-Micromotor with encoder
Position control Brushless DC-Servomotor with integrated Motion Controller
Motor
Encoder
DC-Motor
Position control Brushless DC-Servomotor with Hall sensors
Positioncontroller
Commandposition
Evaluationlimit switch
Example:Limit switch
Motor
Faultoutput
Analoginput
Communicationand configurationsmodule
Protection:OvertemperatureCurrent limitOvervoltage
PI-Speedcontroller
Speedcalculation Armature
positioncalculation
Currentlimiting
3 Phase Sine wavecommutator
Poweramplifier
Hall sensorHall sensorHall sensorinput 3
Evaluation input 3
Communicationand configurationsmodule
Protection:OvertemperatureCurrent limitOvervoltage
PI-Speedcontroller
Speedcalculation Armature
positioncalculation
Currentlimiting
Faultoutput
Analoginput
Commandposition
Input 3Example:Limit switch
Positioncontroller
Channel Channel
5V-Control
Poweramplifier
Evaluationinputs
Evaluationlimit switch
Signal
generatorMotor +
Motor –
Micro Controller
Input 4Input 5

Edition 2011 – 2012
MotionManager
General description
Node
Node
Node
For notes on technical data and lifetime performance refer to “Technical Information”.
© DR. FRITZ FAULHABER GMBH & CO. KGSpecifications subject to change without notice.
Page 5/6
MC Function / CAN
Connection diagram
Up to 127 CANopen devices (nodes) can be connected. e.g. digital inputs or a drive circuit.
PC with CAN interface
External resistor on the last node must be set
e.g. 2 x Motion Controller MCBL 3006 C
DC-Micromotor with encoder and adapter (optional)
Brushless or Linear DC-Servomotor with Hall sensors
Brushless DC-Servomotor with integrated Motion ControllerNote
The “FAULHABER Motion manager” software supports at the moment all CAN interface of the company IXXAT. Extensions for CAN interfaces of othermanufacturers are possible.
Node
FAULHABER Motion Controllers are available as external electronic controls to be used in combination with DC-Micromotors, Brushless DC-Servomotors and Linear DC-Servomotors or, if already integrated, with Brushless DC-Servomotors in the form of motion control systems. Motion control is thus possible for the majority of motors from a diameter of 6 mm upward. The integrated systems reduce the amount of space required. At the same time, their wiring requirements are minimal, which helps to simplify installation.
Operating modes Speed control
PI speed control, even for demanding synchronization requirements Positioning
For moving to defined positions with a high level of resolution. With a PD Controller, the dynamic response can be adjusted to suit the application. Reference and limit switches are evaluated by means of various homing modes.
Speed profiles Acceleration ramps, deceleration ramps and maximum velocity can also be defined for each section. As a result, even complex profiles can be implemented quickly and effectively.
Current control Protects the drive by limiting the motor current to the set peak current. The current is limited to the continuous current by the integrated I²t monitoring if required.
Protective functions - Protection against ESD - Overload protection for the electronic circuitry and the motor - Self-protection against overheating - Overvoltage protection in generator mode Extended operating modes - Stepper motor mode - Gearing mode - Position control to analog set point - Operation as servo amplifier in voltage adjuster mode - Torque/force controller using variable set current input
Interfaces - Discrete I/O Setpoint input
Depending on the operating mode, setpoints can be input via the serial port, via an analog voltage value, a PWM signal or a quadrature signal.
Error output (Open Collector) This can also be used as a digital input for the evaluation of reference switches or for specifying direction of rotation. CANopen interface
For integration into a CAN network with transfer rates of up to 1 Mbit/s. Via the CAN interface a number of drives can be networked and operated on a higher-level control.
Sensor interfaces (position and speed sensors, depending on motor type) Analog Hall signals
Three analog Hall signals, offset by 120°, for motor position and speed in the case of Brushless DC-Motors and Linear DC-Servomotors
Incremental encoders Incremental encoders for motor position and speed in the case of DC-Micromotors and as additional sensors for Brushless DC-Motors
Absolute encoders Serial SSI port for motor position and speed matching Brushless DC-Servomotors with an AES Encoder
CAN Programming / ConfigurationFAULHABER Motion Controllers support the CANopen communication profile under DS301 V4.02 in accordance with the CiA specification for slave devices with the following services: - 1 Server SDO - 3 transmit PDOs, 3 receive PDOs - Static PDO mapping - NMT with node guarding - Emergency ObjectThe transfer rate and node no. are set via the network in accordance with the LSS protocol conforming to DSP305 V1.11, and automatic baud rate detection is also implemented. In addition, all the functions and parameters of the drive unit can be easily activated via a special FAULHABER PDO channel.As regards the CiA device profile for Motion Controllers (CiA 402), the following are supported: - Profile Position Mode and Position Control Function - Homing Mode - Profile Velocity ModeAlso, for each Faulhaber command there is an appropriate CAN frame available on the PDO channel, with which the CAN unit can be operated in the same way as the serial variant and the extended operating modes can be supported. "Faulhaber Motion Manager" software is available for Windows operating systems. It considerably simplifies operation and configura-tion and also enables graphic online analysis of the operating data.OptionsSeparate supply of power to the motor and electronic actuator is optional (important for safety-relevant applications), in which case no third input is required. Depending on the controller, additional programming adaptors and connection aids are available. The modes and parameters can be specially preconfigured on requestNotesMotion Controllers and Motion Control Systems are accompanied by a device manual for installation and putting into operation. A communication and function manual and the "Faulhaber Motion Manager" software are available on request and on the Internet at www.faulhaber.com.

Edition 2011 – 2012
MOSFET Phase A Phase B Phase C
A
I 2 t
R S
GND
CANopen
+ 24V DC
U B
2,7k
LED
CAN_L
CAN_H
GND
n soll
n ist
CAN_L
CAN_H
I ist
CAN-Bus
PWM
+ _
AGND ϕ(t)
Δϕ
U a
B
C
10k
{
+ 24V DC2,7k
LEDV4 V6
MOSFET
UB
M8
M1
M2M5M6
M4GND
AB
RS
IistI 2 t
ϕ(t)
Ua
CANopen
nsoll
nist
CAN_L
CAN_H
AGND
V8
V5V3
V2V1
CAN_L CAN_H
GND
CANopen
10k
GND
V7
∆ ϕ
C
M3
M7ABC
VCC+5V{
+ 24V DC2,7k
LEDV4 V6
MOSFET
UB
M7
M8
M5
M3M4
M6GND
AB
RS
IistI 2 t
PWM
ϕ(t)
Ua
CANopen
nsoll
nist
CAN_L
CAN_H
AGND
V8
V5
M1M2
V3
V2V1
CAN_L CAN_H
GND
CANopen
10k
2,2k VCC
2,2k+5V
GND
V7
{
Communicationand configurationsmodule
Protection:OvertemperatureCurrent limitOvervoltage
PI-Speedcontroller
Speedcalculation Position
calculation
Currentlimiting
Faultoutput
Analoginput
Commandposition
Input 3Example:Limit switch
Positioncontroller
5V-Control
Poweramplifier
Evaluationinput 3
Evaluationlimit switch
SignalMicro Controller
Position control Brushless DC-Servomotor with Hall sensors
Position control DC-Micromotor with encoder
Position control Brushless DC-Servomotor with integrated Motion Controller
PhasePhasePhase
Hall sensorHall sensorHall sensor
orangebrown
yellow
bluegreen
grey
red
black
3 PhasePWMSine wavecommutator
Brushless Motor
For notes on technical data and lifetime performance refer to “Technical Information”.
© DR. FRITZ FAULHABER GMBH & CO. KGSpecifications subject to change without notice.
Page 6/6
Faultoutput
Interface Communicationand configurationsmodule
Protection:OvertemperatureCurrent limitOvervoltage
PI-Speedcontroller
Speedcalculation Armature
positioncalculation
Currentlimiting
3 Phase Sine wavecommutator
Poweramplifier
Hall sensorHall sensorHall sensor
MotorPositioncontroller
Commandposition
Evaluationlimit switch
Example:Limit switch
input 3Evaluation input 3
Analoginput
Communicationand configurationsmodule
Protection:OvertemperatureCurrent limitOvervoltage
PI-Speedcontroller
Speedcalculation Armature
positioncalculation
Currentlimiting
Faultoutput
Analoginput
Commandposition
Input 3Example:Limit switch
Positioncontroller
Channel Channel
5V-Control
Poweramplifier
Evaluationinputs
Evaluationlimit switch
Signal
generator
Encoder
DC-Motor
Motor +
Motor –
Micro Controller
Input 4Input 5