Bridging Shape and Reflectance
23
Bridging Shape and Reflectance Presented by: Jongwoo Lim, Feb 18 2003 Bridging Shape and Reflectance – p.1/23
Transcript of Bridging Shape and Reflectance

Bridging Shape and Reflectance
Presented by: Jongwoo Lim, Feb 18 2003
Bridging Shape and Reflectance – p.1/23

Rendering vs Inverse-Rendering
Geometry
Reflectance Property
Lighting
Radiance MapsRendering
Geometry
Radiance Maps
Lighting
Reflectance PropertyInverse Rendering
Bridging Shape and Reflectance – p.2/23

Parametric BRDF’s
L = B · IRadiance = BRDF · Irradiance
Torrence-Sparrow model
BTS(θi, θo, α|ρd, ρs, σ) = ρd cos θi+ρs
cos θo
e−α2/2σ2
Ward model (isotropic version)
BW (θi, θo, δ|ρd, ρs, σ) =ρd
π+
ρs
4πσ2√
cos θi cos θo
e− tan2 δ/σ2
Bridging Shape and Reflectance – p.3/23

Renderings with Ward BRDF
Isotropic Anisotropic
from Simon Premoze’s homepage (http://www.cs.utah.edu/ premoze/brdf/)
Bridging Shape and Reflectance – p.4/23

BRDF Estimation
We need to estimate BRDF at every point on the object.
Knowns Unknowns
Radiance L
Irradiance I =⇒ BRDF parameters
Surface normal n (ρd, ρs, σ)
Light source direction s
Viewing direction v
Bridging Shape and Reflectance – p.5/23

Difficulties in Estimation
Estimation of specular parameters is difficult :
• The specular lobe is highly peaked
- it is difficult to observe specular points in images
• The specular term is not linear
- it requires many samples to estimate the parameter
Bridging Shape and Reflectance – p.6/23

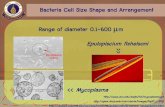
Reflection Component Separation
We can infer the contribution of diffuse and specular part.
M = [MR MG MB ]
=
cos θi1 K(θo1, α1)
......
cos θiNK(θoN
, αN )
ρD,R ρD,G ρD,B
ρS,R ρS,G ρS,B
= [ GD GS ]
KtD
KtS
= G K
55 65 75 85 95 105image frame
0.0
50.0
100.0
150.0
inte
nsity
redgreenblue
55 65 75 85 95 105image frame
0.0
50.0
100.0
150.0
inte
nsity
diffuse reddiffuse greendiffuse bluespecular red
specular bluespecular green
Bridging Shape and Reflectance – p.7/23

Illumination Condition
Direct Illumination
• all reflected lights are from light sources
• only one reflection : light source - surface - camera
Global Illumination
• reflecting surfaces also work as light sources
• multiple reflections until being observed
Bridging Shape and Reflectance – p.8/23

Inverse Radiosity (Lambertian)
Assume Lambertian surfaces
Li = Ei + ρi
∑
j
Lj Fij
Li radiance (radiosity)
Ei emission (light source)
ρi albedo (BRDF)
Fij form factor between patches
ρi = (Li − Ei) / (∑
j
Lj Fij)
pi
j
F
L
ij
i
A
C
Ei
Lj
Bridging Shape and Reflectance – p.9/23

Inverse Radiosity (Parametric BRDF)
radiance = emission + diffuse + specular
LCvPi= ECvPi
+
+ ρd
∑
j
LPiAjFPiAj
+ ρs
∑
j
LPiAjKCvPiAj
pi
j
L L
L
P
C P
i j
A
A
v
C A
i
jk
C
C
v
k
Bridging Shape and Reflectance – p.10/23

Inverse Radiosity (Parametric BRDF)
Radiance from one point can vary with viewing directions.
LPiAj= LCkAj
− SCkAj+ SPiAj
= LCkAj+ ∆SCkPiAj
Iteratively estimate ∆S with initial guess ∆S = 0
Bridging Shape and Reflectance – p.11/23

Inverse Global Illumination Algorithm
Assume constant BRDF over each patch
• Detect specular highlights on surfaces (geometrically)
• Choose sample points inside & around each highlight
• Build links between sample points and patches
• Assign L0 with average radiance value, and ∆S = 0
• Iterate
• Update L using ∆S of each link
• Optimize each surface’s BRDF parameters
• Estimate ∆S with new BRDF parameters
Bridging Shape and Reflectance – p.12/23

Monte-Carlo Sampling
Ck
Aj
QPiAj
QCk Aj
Cv
iP
PiAjL
One-bounce approximation is enough for this purpose.
Bridging Shape and Reflectance – p.13/23

Diffuse Albedo Map
Assume constant specular property over each patch
ρd(x) = πDiffuse(x)
Irradiance(x)
Diffuse(x) = L(x) − Specular(x)
Give lower weight on sample
• which has large specularity
• whose viewing angle is grazing the surface
Bridging Shape and Reflectance – p.14/23

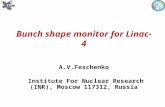
Geometry
So far, we assumed that the geometry is already given.
• input by hand
• measure from the object
• laser range finder, stereo vision, shape from X, . . .
color camera
light stripe range Þnder
robotic arm
light source
object
Bridging Shape and Reflectance – p.15/23

Geometry Acquisition Procedure
1. Surface acquisition from each range image
2. Alignment of range images
3. Retrieving 3D representation
• Merging based on a volumetric representation
• Isosurface extraction
(a) range image acquisition (b) alignment (c) merging (d) isosurface extraction
Bridging Shape and Reflectance – p.16/23

Surface Normal Estimation
Why is the surface normal important?
BRDF is evaluated at each surface points locally.For accurate estimation, precise θ, α are required.
The eigenvector of the covariance matrix of neighbor points
n = Null
(
∑
neighbor
(x − x)(x− x)t
) principal axis
Bridging Shape and Reflectance – p.17/23

Experiment Setup : Conference Room
Bridging Shape and Reflectance – p.18/23

Result : Conference Room
(a) Initial hierarchical polygon mesh, with radiances assigned from images.
(b) Synthetic rendering of recovered properties under original illumination.Bridging Shape and Reflectance – p.19/23

Result : Conference Room
(c) Synthetic rendering of room under novel illumination.
(d) Synthetic rendering of room with seven virtual objects added.Bridging Shape and Reflectance – p.20/23

Result : Whiteboard
Bridging Shape and Reflectance – p.21/23

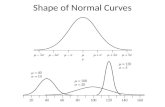
Result : Mug
Synthesized object images
frame 50input synthesized frame 80input synthesized
Bridging Shape and Reflectance – p.22/23

Reference
• Y. Sato, M. D. Wheeler, K. Ikeuchi, Object Shape and ReflectaneModeling from Observation, SIGGRAPH, 1997
• Y. Yu, P. Debevec, J. Malik, T. Haukins, Inverse GlobalIllumination: Recovering Reflectance Models for Real Scenesfrom Photographs, SIGGRAPH, 1999
• P. Debevec, J. Malik, Recovering High Dynamic Range RadianceMaps from Photographs, SIGGRAPH, 1997
• P. Debevec, Rendering Synthetic Objects into Real Scenes:Bridging Traditional Image-based Graphics with GlobalIllumination and High Dynamic Range Photography, SIGGRAPH,1998
Bridging Shape and Reflectance – p.23/23