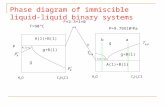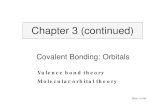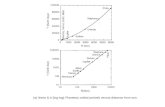
(a) linear & b (log-log) Planetary orbital periods versus distance from sun.

Copyright © The Boeing Company. All rights reserved.
1
Basics of Orbital MechanicsInternational Space Development Conference
Washington, DC19-22 May 2005
Gary Bingaman & Seth PotterThe Boeing Company
Phantom WorksHuntington Beach, CA

Copyright © The Boeing Company. All rights reserved.
2
Orbital Mechanics• An orbit is the path that a body takes under predominantly
the influence of gravity• Orbital mechanics is
– the science of defining and determining that path– the engineering art of using or modifying that path to perform a
specific function or accomplish a particular mission

Copyright © The Boeing Company. All rights reserved.
3
Topics• Fundamental Laws and Constants• Orbit Shapes• Orbital Elements• Basic Equations• Orbital Perturbations• Orbital Maneuvers• Special Orbits

Copyright © The Boeing Company. All rights reserved.
4
Newton’s Three Laws of Motion• First Law
– Every body continues in its state of rest or uniform motion in astraight line unless it is compelled to change that state by forces impressed upon it.
• Second Law– The rate of change of momentum is proportional to the force
impressed and is in the same direction as that force.• Third Law
– To every action there is always opposed an equal reaction.

Copyright © The Boeing Company. All rights reserved.
5
Kepler’s Three Laws of Orbital Motion• First Law
– Each planet moves along an elliptical orbit with the sun as one focus.
• Second Law– The line joining the sun and the planet sweeps out equal areas in equal times.
• Third Law– The squares of the periods of the planets are proportional to the cubes of
their mean distances from the sun.
r = a * (1 - ε 2)1 + ε * cos θ
constant = r2 *dθdt
P = * a3/22πµ1/2
r

Copyright © The Boeing Company. All rights reserved.
6
• Universal Law of Gravitation:
• Applying Newton’s equation: Fg = mg
• Replacing: GM = µ• Results in: µ = gr2
Gravitational ConstantsFg =
GMmr2
Fg = force acting on a body in a gravitational fieldG = universal gravitational constant
6.6742 * 10-11 Nm2 / kg2
M = mass of the large central bodym = mass of the small orbiting bodyr = distance between the centers of the bodies
g = acceleration due to gravity at radius rµ= gravitational parameter – unique for each central body
3.986 * 1014 m3 / sec2 (1.4077 * 1016 ft3 / sec2)
g = GMr2

Copyright © The Boeing Company. All rights reserved.
7
Conic Sections• Orbital motion occurs along conic sections
Circle(unique shape)
Ellipse(many shapes)
Parabola(unique shape)
Hyperbola(many shapes)
Conic Ellipticity UseCircle ε = 0 Ideal (theoretical)Ellipse 0 < ε < 1 Planetary orbits
Parabola ε = 1 Escape orbitsHyperbola ε > 1 Transfer orbits

Copyright © The Boeing Company. All rights reserved.
8
Ellipse is the Most Common Orbit
r = radius from the center of the prime focusrp = perigee radius (closest point)ra = apogee radius (farthest point)a = semi-major axisε = eccentricity
focus(prime) focus
rp ra
2a
ε = ra + rp
ra - rp

Copyright © The Boeing Company. All rights reserved.
9
Isaac Newton’s Velocity Equation
rp = perigee radius (closest point)ra = apogee radius (farthest point)a = semi-major axisε = eccentricityµ = gravitational parameterr = radius at any point in the orbitv = velocity at any point in the orbit
rp ra
2a
r
V
r2
a1-v2 = µ * [ ]

Copyright © The Boeing Company. All rights reserved.
10
Orbital Energy
• Newton’s velocity equation:
• Rearranged:
• Note:– Total energy is a function only of the semi-major axis– As the satellite moves along its orbit, the velocity and the
radius continually change– There is a continuous exchange between kinetic and
potential energies
r2
a1-v2 = µ * [ ]
2a-µ
2v2
- rµ=
TotalEnergy
KineticEnergy
PotentialEnergy+=

Copyright © The Boeing Company. All rights reserved.
11
Inertial Reference System
Ecliptic
Equatorial
Plane
Earth’s Orbit
Sun
Earth
PolarAxis
N
VernalEquinox
X
Z
YOrbiting Satellite

Copyright © The Boeing Company. All rights reserved.
12
Keplerian Orbital Elements –Orbit Size and Shape
a = semi-major axisr0 = radius of central bodyh = altituder = radiusε = eccentricity (oblateness)
rarp
hahp
a: Semi-Major Axis
a = 2
ra + rprp = r0 + hp
ra = r0 + ha
rarp
2a
ε: Orbital Eccentricity
ε = 0 circular orbitε = 1 parabolic orbitε = ra + rp
ra - rp

Copyright © The Boeing Company. All rights reserved.
13
Keplerian Orbital Elements –Orbit Orientation (page 1)
Ω: Right Ascension of Ascending Node
ΩEquatorial PlaneOrb
it Plan
e
Satellite
Nodal Crossing Point (ascending)
Vernal Equinox
Equatorial crossing point – measured in the equatorial plane between the vernal
equinox and the ascending node
• Vernal equinox (first point of Aries) is the location on the celestial sphere where the Sun apparently crosses the Earth’s equator going North (in the Spring)
• Right Ascension is measured in an inertial frame
• Longitude is measured in a relative frame
• Right Ascension is related to Longitude through time
• Ascending node is the point where the satellite crosses the equator going North

Copyright © The Boeing Company. All rights reserved.
14
Keplerian Orbital Elements –Orbit Orientation (page 2)
i: Orbital Inclination
Angle between equatorial plane and orbit plane
0o < i < 90o posigrade orbit(West to East)
90o < i < 180o retrograde orbit(East to West)
Equator i
Satellite
Orbit Plane
ω: Argument of Perigee
Equatorial Plane
Nodal Crossing Point (ascending)
Perigee Point
Orbit Plane
Satellite
ω
Angle between the ascending node and the perigee pointAscending node is the point in the orbit where the satellite crosses the equator going North

Copyright © The Boeing Company. All rights reserved.
15
Keplerian Orbital Elements –Satellite Position
θ: True Anomaly
Satellite
rθ
Perigee
Earth centered angle between perigee and the current satellite location
r = a * (1 - ε 2)1 + ε * cos θ

Copyright © The Boeing Company. All rights reserved.
16
Basic Equations
µ * a * ( 1 - ε 2)r2 * v2γ = sin-1 √1 - [ ]
r2
a1-v = õ * [ ]
a = 2
ra + rp
ε = ra + rp
ra - rp
semi-major axis:
eccentricity:
velocity:
flight path angle:
orbital period: p = µ1/22 * π * a3/2

Copyright © The Boeing Company. All rights reserved.
17
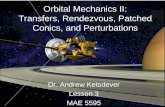
Sources of Orbital Perturbations
Dominant effects• Circular Altitude = 250 nm• Inclination = 28.5º
• Nodal regression = 0.986º/day• Apsidal rotation = -3.587º/day
Dominant effects• Circular Altitude = 250 nm• Inclination = 28.5º
• Nodal regression = 0.986º/day• Apsidal rotation = -3.587º/day
Spherical
Second Harmonic
Third Harmonic
Fourth Harmonic
J2
• Gravitational Anomalies– Non-spherical central body (Earth)
• Oblateness• Higher order terms
– Third bodies• Moon, Sun, other
• Atmospheric drag• Solar radiation
– Direct pressure– Atmospheric function that changes the
effects of atmospheric dragOrbit Solar Solar
Circular Min. Max.Altitude Lifetime Lifetime
(nm) (days) (days)100 2 1150 50 10210 550 80250 1200 400300 3400 2600350 13400 12600400 42000 41000450 127000 128000500 341000 340000
@ W/CdA = 10 lb/ft^210
J3
J4

Copyright © The Boeing Company. All rights reserved.
18
Orbit Types• Classification by Altitude:
– Low Earth Orbit (LEO)• ~<1000 nm
– Medium Earth Orbit (MEO)– High Earth Orbit (HEO)
• ~>10000 nm– Geostationary Earth Orbit (GEO)
• (19320 nm)
• Classification by Orientation to Equator:
– Equatorial (inclination = 0º)– Low Inclination– High Inclination
• Sun synchronous – dependant on altitude
– i = 96.3º @ 100 nm– i = 99.1º @ 500 nm
– Polar (inclination = 90º)– Critically Inclined – no apsidal
rotation• i = 63.4º - posigrade• i = 116.6º - retrograde
• Classification by Shape– Circular– Elliptical
• Molniya– Critically inclined highly elliptical
• Hohmann Transfer• Other
– Parabolic (marginal escape trajectory)
– Hyperbolic (escape trajectory)
• Classification by Direction of Motion:
– Prograde, Direct, or Posigrade: satellite moves eastward
• inclination < 90º– Retrograde: satellite moves
westward• inclination > 90º
– Polar (inclination = 90º)

Copyright © The Boeing Company. All rights reserved.
19
Orbit Transfer
• Two Impulse– High thrust rockets– One perigee burn– One apogee burn– Close to ideal delta V
• Multi-Impulse– High or medium
thrust rockets– More than one
perigee burn– More than one
apogee burn– Steering losses
• Continuous Burn– Low thrust rockets– Spiral trajectory– Steering losses
Two Impulse Multi-Impulse Continuous BurnThrust to Weight Ratio >0.1 <0.1 <<0.001Total Delta V (ft/sec) 14000 to 17000 14000 to 19200 ~19200Travel Time < 1 day several days > 1 week
LEO to GEO Illustrative ExampleIdeal MethodMinimum Energy Method
“Primary” Method

Copyright © The Boeing Company. All rights reserved.
20
Hohmann Transfer Orbit(Minimum Energy)
Hohmann Transfer Orbit
Initial OrbitFinal Orbit
Burn 1
Burn 2
Not to ScaleCircular Velocity in Initial OrbitPerigee Velocity in Transfer OrbitDelta Velocity – Burn 1
Apogee Velocity in Transfer OrbitCircular Velocity in Final OrbitDelta Velocity – Burn 2

Copyright © The Boeing Company. All rights reserved.
21
Plane Change
∆v = 2 * v * sin [ ]2Θ
Θ
vv
For a 60 degree plane change the plane change ∆v equals the circular orbital velocityFor a 60 degree plane change the plane change ∆v equals the circular orbital velocity

Copyright © The Boeing Company. All rights reserved.
22
Combined Hohmann Transfer and Plane Change
∆V = √(( V12 ) + ( V22 ) - ( 2 * V1 * V2 * COS( Θ )))
V1 = velocity in orbit 1V2 = velocity in orbit 2Θ = inclination change between the two orbits ( ∆i )
V1
V2Θ

Copyright © The Boeing Company. All rights reserved.
23
Molniya Orbit• Inclined at 63.43 degrees
– No apsidal rotation– Apsidal rotation (deg. / rev):
• Highly elliptical• Original purpose
– Orbit used by Russia for communications satellites• Launch sites are too high in latitude to achieve economical GEO orbits• Place satellites into highly elliptical orbits with apogee located over
focal location – long dwell time• With no apsidal rotation the apogee would remain over the desired focal
location• Balance between altitudes and ellipticity provides daily repeating
ground track
= 540 * J2 * [ ]2 * [2- (5/2) * cos 2(i)](a * (1 - ε2))
Reequatorialdωrev

Copyright © The Boeing Company. All rights reserved.
24
Molniya Orbit – View From Space 1Orbital Period = 11 hr 57 mini = 63.43ºhp = 500 km (270 nm)ha = 39850 km (21518 nm)ε = 0.74

Copyright © The Boeing Company. All rights reserved.
25
Molniya Orbit – View From Space 2Orbital Period = 11 hr 57 mini = 63.43ºhp = 500 km (270 nm)ha = 39850 km (21518 nm)ε = 0.74

Copyright © The Boeing Company. All rights reserved.
26
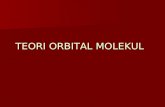
Molniya Orbit – Ground Track
Time spent in this part of orbit:10 hr 10 min
Orbital Period = 11 hr 57 mini = 63.43ºhp = 500 km (270 nm)ha = 39850 km (21518 nm)ε = 0.74

Copyright © The Boeing Company. All rights reserved.
27
Walker Constellation Example – t/p/f = 6/3/1, RAAN Spread = 360º (view 1)
6 satellites3 planes (2 satellites per plane)Phase factor = 1Evenly spaced ascending nodes around entire equator

Copyright © The Boeing Company. All rights reserved.
28
Walker Constellation Example – t/p/f = 6/3/1, RAAN Spread = 360º (view 2)
6 satellites3 planes (2 satellites per plane)Phase factor = 1Evenly spaced ascending nodes around entire equator

Copyright © The Boeing Company. All rights reserved.
29
Walker Constellation Definitionst / p / f = total number of satellites / number of planes / phase factor
phase angle in degrees = ( ) * f
where: f = integer number 0 ≤ f ≤ p - 1
(Phase angle measured between ascending node and satellite when satellite in next most Western plane is at ascending node)
Phase angle
Ascending node
Equator
Constellation planes
SatelliteSatellite at ascending
node
360ºt

Copyright © The Boeing Company. All rights reserved.
30
Walker Constellation Example – t/p/f = 6/3/1, RAAN Spread = 360º (ground tracks)

Copyright © The Boeing Company. All rights reserved.
31
Repeating Ground TracksResonant Orbits
• Provide repeating periodic coverage of a specific area– Null Earth rotation: 1.1408 * 10-5 deg./sec– Null nodal regression:
• Drift of the ascending node– Toward the West for 0 ≤ i ≤ 90º– Toward the East for 90 ≤ i ≤ 180º
• Nodal regression (deg. / rev):
– Designed to repeat in an integer number of orbits• Daily• Every “x” number of days
= -540 * J2 * [ ]2 * cos(i)(a * (1 - ε2))
ReequatorialdΩrev

Copyright © The Boeing Company. All rights reserved.
32
Repeating Ground Tracks 1
-90
-75
-60
-45
-30
-15
0
15
30
45
60
75
90
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180
Longitude (deg)
Latit
ude
• 14 orbits to repeat ground track in 1 day• hcirc = 446.48 nm• i = 51.6º
• 14 orbits to repeat ground track in 1 day• hcirc = 446.48 nm• i = 51.6º

Copyright © The Boeing Company. All rights reserved.
33
Repeating Ground Tracks 2
-90
-75
-60
-45
-30
-15
0
15
30
45
60
75
90
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180
Longitude (deg)
Latit
ude
• 16 orbits to repeat ground track in 1 day• hcirc = 105.21 nm• i = 51.6º
• 16 orbits to repeat ground track in 1 day• hcirc = 105.21 nm• i = 51.6º

Copyright © The Boeing Company. All rights reserved.
34
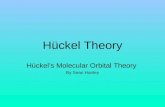
Repeating Ground Tracks 3
-90
-75
-60
-45
-30
-15
0
15
30
45
60
75
90
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180
Longitude (deg)
Latit
ude
• 41 orbits to repeat ground track in 3 days• hcirc = 511.12 nm• i = 51.6º
• 41 orbits to repeat ground track in 3 days• hcirc = 511.12 nm• i = 51.6º

Copyright © The Boeing Company. All rights reserved.
35
Geosynchronous Orbits• Satellite always remains over the same location
over the Earth’s equator (geostationary)• Inclination and eccentricity are close to zero• Useful for communication or weather satellites• Limited number of satellite locations (slots)
available
Altitude ≈ 35785 km (19322 nm)

Copyright © The Boeing Company. All rights reserved.
36
Geosynchronous Satellite with 2 deg. Inclination and 0.001 Eccentricity

Copyright © The Boeing Company. All rights reserved.
37
Sun Synchronous Orbit Illustration
Ecliptic
Equatorial
Plane
Earth’s Orbit
Sun
Earth
PolarAxis
VernalEquinox
X
YOrbiting Satellite
N
Z

Copyright © The Boeing Company. All rights reserved.
38
Sun Synchronous Orbit Parameters• Satellite orbit maintains the same relationship to
the sun– Satellite always observes the Earth at the same local time
Nodal regression (deg. / rev):
For sun synchronous orbit:
≈ 360º / 365.2425 days = 0.9856º per day
= -540 * J2 * [ ]2 * cos(i)(a * (1 - ε2))
ReequatorialdΩrev
dΩdt

Copyright © The Boeing Company. All rights reserved.
39
Summary• Orbital mechanics is a function of Kepler’s Laws
of orbital motion as modified by Newton’s Laws of motion and gravity
• Knowledge of gravity forces are used to predict future satellite states given initial state vector –six Keplerian orbital elements
• Mission requirements dictate, or provide options for, the choice of orbital parameters – size, shape, and orientation

Copyright © The Boeing Company. All rights reserved.
40
Bibliography• Larson, Wiley J., and Wertz, James R., (editors), Space Mission Analysis
and Design, Second Edition, published jointly by Microcosm, Inc., El Segundo, CA, and Kluwer Academic Publishers, Dordecht, The Netherlands, 1992; Chapters 6 and 7.
• http://liftoff.msfc.nasa.gov/academy/rocket_sci/orbmech/orbmech.html
• http://homepages.primex.co.uk/~omen/omen13.htm#ORBITAL%20TERMS
• Satellite Tool Kit Help Menu