Adaptive Sliding Mode Control for Quadrotor Aerial Robot with Ι Type Configuration
7
www.seipub.org/ijace International Journal of Automation and Control Engineering (IJACE) Volume 3 Issue 1, February 2014 doi: 10.14355/ijace.2014.0301.03 Adaptive Sliding Mode Control for Quadrotor Aerial Robot with Ι Type Configuration Lifeng Wang *1 , Chongkui He 1 , Pei Zhu 1 1 North China University of Technology, Field Bus Technology & Automation Lab, Jin Yuan Zhuang Road No. 5,Shijingshan District, Beijing, China *1 [email protected]; 1 [email protected]; 1 [email protected] Abstract This paper presents an adaptive sliding mode control for trajectory tracking of quad rotor aerial robot with I type configuration. A continuous adaptive dynamic vector is used to eliminate the chattering phenomenon in the sliding mode control and the asymptotic stability is achieved. On the base of a nonlinear dynamic model of the quad rotor with I configuration, adaptive sliding mode nonlinear controller is synthesized for the purpose of stabilization and trajectory tracking of quad rotor. In order to validate the robustness of the proposed control method, the model deviations are modeled. It behaves perfectly at the reference altitude and trajectory track in simulation. Keywords Adaptive Control; Adaptive Sliding Mode Control; Quadrotor Model; Robust Control Introduction The quad rotor aerial robot emerges as a kind of popular platform for unmanned aerial vehicle(UAV) research due to its simple structure, the ability to hover and vertical takeoff and landing(VTOL) capability[Hyon Lim+2012]. Although there are kinds of configurations, the priority of I type configuration is focused on the increase of space and better perception of direction. Because of quad rotor’s complexity of dynamic and uncertainty of parameters, the control of quad rotor has been a challenging task. Among various control concepts, sliding mode control is the nonlinear control method which gains a wide acceptance in the control engineering community, with many applications in the field of flight control, robotics etc. But it maybe give rise to the chattering phenomenon near the sliding surface because of the unknown bounded disturbance. Adaptive control can eliminate the model deficiency through online estimated the uncertain parameters to achieve global asymptotic stability [Mingu Kim+2012]. The neural networks are adopted to estimate the uncertain parameters to enhance the robustness of control. The uncertainties and unmodeling dynamics are online learned by neural networks to estimate the adaptive variable of controller in ref[A. Rahideh+2012, Chih-Lyang Hwang+2012, Rolf T. Rysdyk+1998]. Adaptive sliding mode control based on Lyapunov theory is done to validated by simulation and the asymptotic stability is proved in ref[S.Lee+2005, Jin Young Choi+2006, Ying-Jeh Huang+2008, Hakim Bouadi+2011, J. Zhang+2012]. An adaptive fuzzy sliding-mode control is adopted to control the position and attitude for a quad rotor helicopter or tilted rotor aircraft. Through combining the adaptive fuzzy technique and sliding mode control, the undesirable chattering phenomenon is eliminated in ref[Cosmin Coza+2006, W.Mackunis+2010]. Output feedback sliding mode control validation is shown in ref[Ming Xin+2011]. The nonlinear control approach is used to control the attitude and trajectory tracking under the uncertainties in quadrotor’s dynamic model [Chih- Lyang Hwang+2012, J. Zhang+2012, W. Mackunis+ 2010, Ming Xin+2011, Lifeng Wang+2013], even mechanical failure or even the presence of the uncertainty in inertial matrix. So, in generally, using the adaptive technique to enhance the robustness is more suitable for various type aerial robots due to its starting from original model. In this paper, an adaptive sliding mode method is presented and the asymptotic stability is proved based on Lyapunov theory. Then, we present the model of quadrotor obtained from Newton-Euler formation. Next, a hierarchical structure of adaptive sliding mode method is addressed. Furthermore, the model deviations are modeled in simulation to validate the robustness of the proposed control method. Adaptive Sliding Mode Control Law Consider a control affine nonlinear system, () () x fx gxu = + +∆ (1) Where n x R ∈ is the state vector, m u R ∈ is the control
-
Upload
shirley-wang -
Category
Documents
-
view
213 -
download
0
description
http://www.seipub.org/ijace/paperInfo.aspx?ID=13358 This paper presents an adaptive sliding mode control for trajectory tracking of quad rotor aerial robot with I type configuration. A continuous adaptive dynamic vector is used to eliminate the chattering phenomenon in the sliding mode control and the asymptotic stability is achieved. On the base of a nonlinear dynamic model of the quad rotor with I configuration, adaptive sliding mode nonlinear controller is synthesized for the purpose of stabilization and trajectory tracking of quad rotor. In order to validate the robustness of the proposed control method, the model deviations are modeled. It behaves perfectly at the reference altitude and trajectory track in simulation.
Transcript of Adaptive Sliding Mode Control for Quadrotor Aerial Robot with Ι Type Configuration

www.seipub.org/ijace International Journal of Automation and Control Engineering (IJACE) Volume 3 Issue 1, February 2014 doi: 10.14355/ijace.2014.0301.03
Adaptive Sliding Mode Control for Quadrotor Aerial Robot with Ι Type Configuration Lifeng Wang*1, Chongkui He1, Pei Zhu1
1North China University of Technology, Field Bus Technology & Automation Lab, Jin Yuan Zhuang Road No. 5,Shijingshan District, Beijing, China
*[email protected]; [email protected]; [email protected] Abstract
This paper presents an adaptive sliding mode control for trajectory tracking of quad rotor aerial robot with I type configuration. A continuous adaptive dynamic vector is used to eliminate the chattering phenomenon in the sliding mode control and the asymptotic stability is achieved. On the base of a nonlinear dynamic model of the quad rotor with I configuration, adaptive sliding mode nonlinear controller is synthesized for the purpose of stabilization and trajectory tracking of quad rotor. In order to validate the robustness of the proposed control method, the model deviations are modeled. It behaves perfectly at the reference altitude and trajectory track in simulation.
Keywords
Adaptive Control; Adaptive Sliding Mode Control; Quadrotor Model; Robust Control
Introduction
The quad rotor aerial robot emerges as a kind of popular platform for unmanned aerial vehicle(UAV) research due to its simple structure, the ability to hover and vertical takeoff and landing(VTOL) capability[Hyon Lim+2012]. Although there are kinds of configurations, the priority of I type configuration is focused on the increase of space and better perception of direction. Because of quad rotor’s complexity of dynamic and uncertainty of parameters, the control of quad rotor has been a challenging task.
Among various control concepts, sliding mode control is the nonlinear control method which gains a wide acceptance in the control engineering community, with many applications in the field of flight control, robotics etc. But it maybe give rise to the chattering phenomenon near the sliding surface because of the unknown bounded disturbance. Adaptive control can eliminate the model deficiency through online estimated the uncertain parameters to achieve global asymptotic stability [Mingu Kim+2012].
The neural networks are adopted to estimate the uncertain parameters to enhance the robustness of
control. The uncertainties and unmodeling dynamics are online learned by neural networks to estimate the adaptive variable of controller in ref[A. Rahideh+2012, Chih-Lyang Hwang+2012, Rolf T. Rysdyk+1998]. Adaptive sliding mode control based on Lyapunov theory is done to validated by simulation and the asymptotic stability is proved in ref[S.Lee+2005, Jin Young Choi+2006, Ying-Jeh Huang+2008, Hakim Bouadi+2011, J. Zhang+2012]. An adaptive fuzzy sliding-mode control is adopted to control the position and attitude for a quad rotor helicopter or tilted rotor aircraft. Through combining the adaptive fuzzy technique and sliding mode control, the undesirable chattering phenomenon is eliminated in ref[Cosmin Coza+2006, W.Mackunis+2010]. Output feedback sliding mode control validation is shown in ref[Ming Xin+2011]. The nonlinear control approach is used to control the attitude and trajectory tracking under the uncertainties in quadrotor’s dynamic model [Chih-Lyang Hwang+2012, J. Zhang+2012, W. Mackunis+ 2010, Ming Xin+2011, Lifeng Wang+2013], even mechanical failure or even the presence of the uncertainty in inertial matrix. So, in generally, using the adaptive technique to enhance the robustness is more suitable for various type aerial robots due to its starting from original model.
In this paper, an adaptive sliding mode method is presented and the asymptotic stability is proved based on Lyapunov theory. Then, we present the model of quadrotor obtained from Newton-Euler formation. Next, a hierarchical structure of adaptive sliding mode method is addressed. Furthermore, the model deviations are modeled in simulation to validate the robustness of the proposed control method.
Adaptive Sliding Mode Control Law
Consider a control affine nonlinear system,
( ) ( )x f x g x u= + + ∆ (1)
Where nx R∈ is the state vector, mu R∈ is the control

International Journal of Automation and Control Engineering (IJACE) Volume 3 Issue 1, February 2014 www.seipub.org/ijace
21
vector of a system, m n= , and nR∆∈ is the unknown vector which describes the external disturbance or modeling error, and it changes very slowly 0∆ ≈ . It is assumed that ( )f x and ( )g x are continuously differentiable. Also, ( )g x has full rank and is reversible.
Consider the following sliding surface,
rs e x x= = − (2) where re x x= − is the error state vector with regard to the desired state vector rx . The first derivative of the sliding surface can be written as:
( ) ( )r rs e x x f x g x u x= = − = + + ∆ − (3) In order to let the 0s = , let us propose the following control input,
1 ˆ( )( ( ) )u g x ks f x−= − − − ∆ (4) Where k is positive definite diagonal matrix. Substitute the proposed control input vector to the first derivative of the sliding surface, having the following form,
ˆrs ks x ks= − + ∆ − − ∆ = − + ∆ (5)
Where ∆̂ is online estimated vector. In above equations, assume the ˆ
rx∆ = ∆ − − ∆ , then construct the adaptive dynamic vector as follows:
ˆrx sλ∆ = ∆ − − ∆ = − (6)
Where λ is the positive definite diagonal gain matrix. When the external disturbance or unmodeling error changes very slowly 0∆ ≈ , 0rx ≈ , we have ˆ sλ∆ = .
Theorem: If the suitable adaption laws (6) are used with the proposed control input of (4), then the sliding surface described in (5) of the affine nonlinear system will converge to zero as time increases.
Proof: consider the following Lyapunov candidate function,
11 12 2
T TV s s λ−= + ∆ ∆ (7)
The first derivative of the Lyapunov candidate function can be represented as
1T TV s s λ−= + ∆ ∆ (8) Expanding the above equation, we have,
1 1( ) ( ) 0T T T T TV s s s ks s s ksλ λ λ− −= + ∆ ∆ = − + ∆ + ∆ − = − < (9) So it can be stated that the sliding surface with respect to the error states converges to zero as time increases.
Dynamic Model of Quadrotor
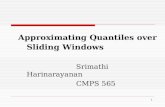
The typical quad rotor mechanism and coordinate
system is briefly shown in Fig 1, whose four propellers provide the three required moments (roll, pith and yaw) and lifting force. And the four motors are I type configure. It is assumed that the aerodynamic forces iF and moments iT of four propellers are proportional to the square of angular velocity iω . The formula is as follows:
2
2
i f i
i t i
F k
T k
ω
ω
=
= (10)
Where i =1,2,3,4. ,f tk k
are respectively aerodynamic force and anti-torque coefficient. Since it is possible to independently modify the speed of each propeller, then the lifting force and three moments can be given as follows: lifting force, roll torque, pitch torque, yaw torque matrix style:
21
22
232
4
1 1 1 11 1 1 1
1 1 1 11 1 1 1
x fp
y fq
r r t
z f
L kTL kT
T L kF k
ω
ω
ω
ω
− − − − = − −
(11)
The lever arm , ,r x yL L L
are the distance from the motor center to the coordinate axis.
Lr
LxLy
F2
F3
F4
F1
rigid body frame B
flat earth frame E
4 CW
3 CW
2 CCW
1 CCW
e
b
y
x
z
y'
x'z'
FIG. 1 QUADROTOR COORDINATE FRAME SYSTEMS
Rigid Body Six Freedom Model
The dynamics of a rigid body under external forces applied to the center of mass expressed in the body fixed frame are in Newton-Euler formalism as following:
0 sin0 cos sin
cos cos
00 /
( ) ( )
z
u
v
l l l w
u rv qw gv ru pw gw qu pv F g
m
c uc v m
k z z z z c wm
θθ ϕθ ϕ
δ
− + = − − + + − − + −
+ + − −
(12)

www.seipub.org/ijace International Journal of Automation and Control Engineering (IJACE) Volume 3 Issue 1, February 2014
22
1 2 3 4
1 2 3 4
( ) / /
( ) / /
( ) / /
/( )( ) /
0 /
zz yy xx p xx
xx zz yy q yy
yy xx zz r zz
p xxr
r q yy
r zz
qr I I I T Ipq pr I I I T Ir pq I I I T I
c p II qI p c q I
c r I
ω ω ω ωω ω ω ω
− = − − + −
+ − − + − + − − +
(13)
Where [ ]Tu v w is velocity in the body frame, [ ]Tp q r is the angular velocity in the body frame.
, ,xx yy zzI I I are symmetrical body moment of inertia, m
is mass. The weight forces of mass center are as follows: [ ]sin cos sin cos cos Tmg mg mgθ θ ϕ θ ϕ− − . The elastic force of landing gear on the ground models the characteristics of taking off scenario for quadrotor, so while flying or leaving the ground, it disappear. It models: [ ]0 0 ( ) ( ) T
l l lk z z z zδ− − , where lk and lz are elastic coefficient and elastic deformation on ground,
and the function 1 0
( )0 0
ll
l
z zz z
z zδ
− >− = − ≤
. The gyroscopic
torque vector of propeller, 1 2 3 4( )[ 0]TrI q pω ω ω ω+ − − − .
The aerodynamic force and moments coefficients is
rqpwvu cccccc ,,,,,.
To obtain the translational and rotational motions transform from the body frame to the flat earth coordinate system, the well-known navigation equations is as follows:
1 sin tan cos tan0 cos sin0 sin / cos cos / cos
pqr
ϕ ϕ θ ϕ θθ ϕ ϕψ ϕ θ ϕ θ
= −
(14)
cos sin sin sincos cos
sin sin cos cos sin coscos cos sin cos
cos sinsin sin sin cos sin sin
sin sin cos cos cos
x uy vz w
ϕ ψ ϕ ψθ ψ
ϕ θ ψ ϕ θ ψϕ ψ ϕ ψ
θ ψϕ θ ψ ϕ θ ψ
θ ϕ θ ϕ θ
− + + − = + + −
(15)
Where the vector [ ]Tx y z stands for the position of
quad rotor in flat earth coordinate, and the vector
[ ]Tϕ θ ψ stands for the Euler angle of body frame attitude in the flat earth coordinate.
Motor Dynamic
The revolving speed of propellers driven by the brushless DC-motor is proportional to the input voltage which is regulated by speed control unit. Input command signals come from the flight control system in the light of flight task. In attitude control, the model of motor must be included. The dynamic model of DC-motor can be described in following formula:
21 2 3i i i ick k kω ω ω ω= − − + (16)
The coefficient k1 k2 and k3 are the constant in dynamic model, icω is the regulated signal pwm from the flight control unit and ith is the index of DC-motor.
The above airframe dynamic of typical quad rotor involves formula (12), (13), (14), (15) and (16), standing for quad rotor dynamic, navigation equations and motor dynamic, respectively. In the equations describing the dynamic of quad rotor, the total state variable is 16 state variables and the 4 control input variables. The inherent characteristics of strong coupling in pitch-roll-yaw and underactuation are seen in state equations.
Adaptive Sliding Mode Controller for Trajectory Tracking of Quadrotor
In order to solve the robustness and coupling in pitch-roll-yaw, the adaptive sliding mode controller is applied to the controller according to the law in section 2. In parallel, the hierarchical structure of slow-loop and fast-loop are adapted to adaptive for under actuation. Meanwhile, the simplified model is used for sliding mode controller. The overall controller has two loops and is depicted in Fig 2. The saturation block is inserted to avoid the large deviation. The integral block stands for the adaptive item whose the definition of s1, s2, s3.
FIG 2 ADAPTIVE SLIDING MODE CONTROLLER OF HIERARCHICAL STRUCTURE FOR QUADROTOR
Quad-rotor
Model with I configuration
[ ]Tx y z
[ ]T
c c cx y z
,c cφ θ
cψ
icw
[ ]Tp q r[ ]Tφ θ ψ
zF
− −
dk
ek
1Invpk
vk
3Inv
[ ]Tc c cp q r
−
2Inv
[ ]Tp q rT T T
4HZ Slow Loop
50HZ Fast Loop[ ]Tx y z
∫ 1λ
∫ 3λ∫ 2λ

International Journal of Automation and Control Engineering (IJACE) Volume 3 Issue 1, February 2014 www.seipub.org/ijace
23
The following process describes the details of adaptive sliding mode control of hierarchical structure.
Slow loop:
The desired trajectory path can be divided into sequence of segments with waypoints. So the quad rotor tracks from one waypoint to the next waypoint with desired velocity and acceleration constraints, then the segments are connected to approximate the continuous trajectory well. The slow loop frequency is about 4 Hz due to the position sensor dynamic response.
The command signals include the trajectory and yaw commands. The trajectory command is the position command xc, yc, zc. The yaw command isψc. It is assumed that the pitch and roll angle are small enough to simplify the formula (12) and (15) while the aerodynamic force and elastic force are neglected, the relationship of attitude angle and position derivative can be transformed as symbol inv1:
1
( sin cos ) /( cos sin ) /
ˆ( )
c z
c z
zc
x y m Fx y m F
F z g m
ϕ ψ ψθ ψ ψ
= −
= +
= + + ∆
(17)
Where the estimated 1∆̂ is online estimated to adaptive the deficiency of simplified model inversion according to formula (6). In equations (17), the second derivative of variable z can be regarded as the first derivative of variable z . So consider the following sliding surface,
1s z= (18) So the adaptive sliding mode control is as follows:
1 1 1ˆ sλ∆ = (19)
Trajectory control is considered to exponentially drive all three components of waypoint error to stabilize. Then we would want to command the acceleration to satisfy the followings:
2
2
2
2 ( ) ( )
2 ( ) ( )
2 ( ) ( )
c u u x c
c v v y c
c w w z c
x x x x k x k k x x
y y y y k y k k y y
z z z z k z k k z z
ξω ω
ξω ω
ξω ω
= − − − = − − −
= − − − = − − −
= − − − = − − −
(20)
Where ξ is damping factor of system, ω is natural frequency of system. And in fig 2, the factors are
[ ]Tp x y zk k k k= and [ ]Td u v wk k k k= . From
above formula (17), (19) and (20), while referring to fig 2, the position control of slow loop provides the attitude set points for the attitude controller of fast loop. If the desired system dynamic is perfect, the damping factor is 0.4~0.8. Only is the natural
frequency of system required to aware that the controller factor can be quantified as follows:
2x y zk k k ωξ
= = = , 2u v wk k k ωξ= = = .
Fast Loop:
Fast loop is attitude control loop required to be fast respond to the attitude angle change, whose 50 Hz frequency is settled by system dynamic and control unit.
From formula (14), we can transform the follows: 1 ˆ1 sin tan cos tan
ˆ0 cos sinˆ0 sin / cos cos / cos
c
c
c
p k sq k sr k s
ϕϕ ϕ
θ θ θ
ψ ψ ψ
ϕ θ ϕ θϕ ϕ
ϕ θ ϕ θ
− ∆ − = − − − ∆ − ∆
(21)
where the matrix inverse stands for symbol inv2. Considering the sliding mode surface,
[ ]2T
c c cs ϕ ϕ θ θ ψ ψ= − − − (22) So the adaptive sliding mode control is as follows:
2 2 2ˆ ˆ ˆ ˆ
Tsϕ θ ψ λ ∆ = ∆ ∆ ∆ =
(23)
From formula (13), after simplification, we can transform the follows:
ˆ( )ˆ( )
( ) ˆ
ppc p p xx zz yy
qc q q yy xx zz q
yy xxrc r r zz r
T k s I I I qr
T k s I I I prI I pqT k s I
∆− − = − + − − ∆ −− ∆
(24)
Where the estimated ˆ ˆ ˆ, ,p q r∆ ∆ ∆ are online estimated to
adaptive the deficiency of simplified model inversion according to formula (6). Considering the sliding mode surface,
[ ]3T
c c cs p p q q r r= − − − (25) So the adaptive sliding mode control is as follows:
3 3 3ˆ ˆ ˆ ˆ
p q r sλ ∆ = ∆ ∆ ∆ = (26)
In above formula (21), (24), the factors [ ]Tek k k kϕ θ ψ= and [ ]Tv p q rk k k k= can be
quantified in the same process. For example: 22 ( ) ( ( ) )
( )c c q c
q q c
k k
k q k kθ
θ
θ ξωθ ω θ θ θ θ θ
θ θ
= − − − = − −
≈ − − −
(27)
The factor 2
kθωξ
= and 2qk ωξ= are gained in the
same formula.
Motor speed signal:
Because of the formula (11), the equation can be

www.seipub.org/ijace International Journal of Automation and Control Engineering (IJACE) Volume 3 Issue 1, February 2014
24
transformed as follows
1
2
3
4
/ ( )1/ 4 1/ 4 1/ 4 1/ 4/ ( )1/ 4 1/ 4 1/ 4 1/ 4
1/ 4 1/ 4 1/ 4 1/ 4 / ( )1/ 4 1/ 4 1/ 4 1/ 4 /
pc x fc
qc y fc
c rc r t
c zc f
T L k
T L k
T L kF k
ωωωω
− − = − −
− −
(28)
where the square root stands for symbol inv3.
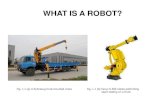
FIG 3 THE DEMONSTRATOR OF SIMULATING QUADROTOR
WITH I CONFIGURATION
Simulation Results
In this section, the demonstrating results are presented to observe the performances of the proposed adaptive sliding mode control. We considered the case of a trajectory-tracking problem which is rectangle shape tracking. The parameters used for the quad rotor model and the controller are given in table 1. The parameters are referred to as the quad rotor prototype which is preliminarily designed in our lab, refer to Fig 3.
TABLE 1 MODEL PARAMETERS IN DEMONSTRATOR OF QUADROTOR
parameter
description Value in
quadrotor dynamic model
modeling error percent in controller
m Mass of quadrotor 1.77kg 120% Lr, Lx,
Ly Lever arm length
0.420m,0.362m,0.212m
100%
Ixx Body inertia of x
axis 2.16*10^-3 kgm^2 75%
Iyy Body inertia of y
axis 4.52*10^-3 kgm^2 120%
Izz Body inertia of z
axis 8.33*10^-3 kgm^2 80%
kf Force coefficient 0.301e-
3N/(rad/s)^2 95%
kt Torque coefficient 0.421e-
5N/(rad/s)^2 85%
k1,k2,k3
Motor model coefficient
20, 0.01, 3.5 0
kl Elastic coefficient
of gear 6000N/m 0
In the controller, the parameters are defined as follows: The natural frequency of slow loop in formula (20) is assumed to be 1 Hz, the damping ratio is chosen as
0.72 according to the experience in simulation. So the proportional parameters in controller are gained in formula (20). In the same way, the natural frequency of pitch and roll attitude in formula (21) and (24) is supposed to be 10 Hz and the damping ratio is chosen as 0.7. However, the natural frequency of yaw attitude is chosen as 2 Hz and damping ratio as 0.7. The gains matrix 1 2 3, ,λ λ λ elements are respectively 0.7, 0.2, 0.05.
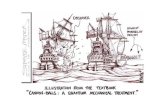
The rectangle shape trajectory is 10 m*10 m field about 10 m altitude, the tracking simulation task is described as taking off, tracking the rectangle shape trajectory, then hovering and changing the yaw in the end point. The results in Fig 4 illustrate the attitude angle variables varying as time. It can be seen that the adaptive dynamic is stable.
0 10 20 30 40 50 60 70
-20
0
20
40
60
80
100
120
140
160
180
attitude angle unit: degree
Time (s)
Atti
tude
Ang
le(d
egre
e)
Фθψ
FIG 4 ATTITUDE ANGLE ФΘΨDYNAMIC
02
46
810
02
46
8100
2
4
6
8
10
trajectory tracking simulation
Take off
trajectory tracking
FIG 5 TRAJECTORY TRACKING PERFORMANCE OF THE
ADAPTIVE SLIDING MODE CONTROL
The results in Fig 5 illustrate the trajectory tracking performance of adaptive sliding mode control law developed in this paper. The modeling difference between plant model and the adaptive sliding mode controller includes two aspects: no motor dynamic

International Journal of Automation and Control Engineering (IJACE) Volume 3 Issue 1, February 2014 www.seipub.org/ijace
25
model in controller, and deviation of quad rotor body inertia, mass and aerodynamic coefficients etc. But the proposed controller behaves perfectly at the reference altitude and trajectory track seen in Fig 5.
Conclusions
The analysis presented here has shown the hover and trajectory tracking capability of proposed adaptive sliding mode controller. A nonlinear dynamic model of the quad rotor with I configuration was provided, and a controller based on the adaptive sliding mode control was synthesized for the purpose of stabilization and trajectory tracking. The proposed control strategy can enhance the robustness of controller under the existence of model deviation. The control law behaved perfectly at the reference altitude and trajectory track in simulation.
REFERENCES
A. Das, K. Subbarao, and F. Lewis, “Dynamic inversion with
zero-dynamics stabilisation for quadrotor control”,
Control Theory Appli-cations, IET, vol. 3, no. 3, pp. 303–
314, March 2009.
A. Rahideh, A.H. Bajodah, M.H. Shaheed; “Real time
adaptive nonlinear model inversion control of a twin
rotor MIMO system using neural networks”,
Engineering Applications of Artificial Intelligence 25
(2012) 1289–1297
Chih-Lyang Hwang; “Hybrid Neural Network Under-
Actuated Sliding-Mode Control for Trajectory tracking of
Quad-Rotor Unmanned Aerial Vehicle”, IEEE World
Congress on Computational Intelligence June,10-15,2012-
Brisbane, Australia.
Cosmin Coza and C.J.B Macnab; “A New Robust Adaptive-
Fuzzy Control method Applied to Quadrotor Helicopter
Stabilization”, Fuzzy Information Processing Society,
2006. NAFIPS 2006. Annual meeting of the North
American, Date 3-6 June 2006
Hyon Lim, Jaemann Park, Daewon Lee, and H.J. Kim; “Build
Your Own Quadrotor”, IEEE ROBOTICS &
AUTOMATION MAGAZINE, SEPTEMBER 2012
Hakim Bouadi, S.Simoes Cunha, A.Drouin and F.Mora-
Camin o; “Adaptive Sliding Mode Control for Quadrotor
Attitude Stabilization and Altitude Tracking”, 12th IEEE
international Symposium on Computational Intelligence
and Informatics. 21-22 November, 2011, Budapest,
Hungary.
J. Zhang L. Yang G. Shen; “New hybrid adaptive control
approach for aircraftwith centre of gravity variation”,
IET Control Theory Appl., 2012, Vol. 6, Iss. 14, pp. 2179–
2187
Jin Young Choi, Dongkyoung Chwa; “Adaptive Control
Based on a Parametric Affine Model for Tail-Controlled
Missiles”, IEEE TRANSACTIONS ON AEROSPACE
AND ELECTRONIC SYSTEMS VOL. 42, NO. 2 APRIL
2006
Lifeng Wang, Yichong He, Zhixiang Zhang, Congkui
He;”Trajectory Tracking of Quadrotor Aerial Robot
Using Improved Dynamic Inversion Method”, Intelligent
Control and Automation, Vol.4 No.4, NOV 2013
Ming Xin, Yunjun Xu, Ricky Hopkins; “Trajectory Control of
Miniature Helicopters Using a Unified Nonlinear
Optimal Control Technique”, Journal of Dynamic
Systems, Measurement, and Control NOVEMBER 2011,
Vol. 133.
Mingu Kim, Youdan Kim, Jaiung Jun; “Adaptive Sliding
Mode Control using Slack Variables for Affine
Underactuated systems”, 51st IEEE Conference on
Decision and Control, December 10-13, 2012, Maui,
Hawaii, USA
Rolf T. Rysdyk and Dr. Anthony J. Calise; “Adaptive
nonlinear Controll for Tiltrotor Aircraft”, Proceedings of
the 1998 IEEE International Conference on Control
Applications, Trieste, Italy, 1-4 September, 1998
S. Barghandan, M. A. Badamchizadeh; “A New Approach
for Designing Robust Adaptive Fuzzy Sliding Mode
Controller”, Electrical Engineering (ICEE), 2013 21st
Iranian Conference on, Date 14-16 May 2013
S.Lee, C.Ha, B.S.Kim; “Adaptive nonlinear control system
design for helicopter robust command augmentation”,
Aerospace Science and Technology, 9(2005)241-251
W. Mackunis, Z.D.Wilcox, M. K. Kaiser, and W. E. Dixon;
“Global Adaptive Output Feedback Tracking Control of
an Unmanned Aerial Vehicle”, IEEE Transactions on
Control systems technology, Vol.18,No.6,November 2010
Ying-Jeh Huang, Tzu-Chun Kuo, Shin-Hung Chang;
“Adaptive sliding-mode Control for Nonlinear Systems
with Uncertain Parameters”, IEEE Transactions on
System, man and Cybernetics-Part B:cybernetics, Vol. 38,
No. 2, Aprial 2008

www.seipub.org/ijace International Journal of Automation and Control Engineering (IJACE) Volume 3 Issue 1, February 2014
26
Lifeng Wang was born in Shenyang, China, in 1967.3. In 2000, he gained the Ph.D in the field of Aero Propulsion System from Beihang University in Beijing, China.
He worked as an engineer in Shenyang Aircraft Institute from 1989 to 2000. At
present, he is professor in automatic control field in North China University of Technology. He once acted as vice dean
of college responsible for graduated students. He held more than 20 papers published and indexed by EI, ISTP etc. His current research interest is aero propulsion system control and aerial robot automatic control.
Chongkui He was born in 1986. At present, he acts as master students in North China University of Technology.
Pei Zhu was born in 1983. Currently, he is master students in North China University of Technology.