20 A Thin, Linear, Vibrating Beam Model: An Example of a Higher Order PDEjbell/pde_notes/20_Beam...
11
Click here to load reader
Transcript of 20 A Thin, Linear, Vibrating Beam Model: An Example of a Higher Order PDEjbell/pde_notes/20_Beam...

20 A Thin, Linear, Vibrating Beam Model:
An Example of a Higher Order PDE
For a thin beam of modest displacement, negligible rotary inertia, and stressthat can be considered not to vary significantly across a beam section, wehave the Euler-Bernoulli beam equation
EI∂4u
∂x4+ ρ
∂2u
∂t2= F (x, t) (1)
where u(x, t) is the displacement of the beam’s centerline from the x-axis attime t, F represents the distributed body forces, E is Young’s modulus, Iis moment of inertia (EI is sometimes denoted flexural rigidity), and ρ is(linear) density of the beam. Here we take E, I, ρ as positive constants, anddefine α2 := EI/ρ.
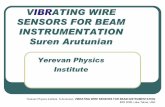
As a fourth-order equation we need to impose four boundary conditions.Without loss of generality, consider what boundary conditions we can imposeat x = 0 (see figure 1):
• free end: uxx(0, t) = 0, uxxx(0, t) = 0 ;
• clamped end: u(0, t) = 0 = ux(0, t) ;
• simply-supported/hinged end: u(0, t) = uxx(0, t) = 0 .
20.1 Examples of unforced beam problems
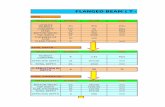
Example: both ends simply supported (no body forces; see figure 2(a)):
utt = −α2uxxxx 0 < x < 1 , t > 0
u(0, t) = 0 = uxx(0, t) t > 0
u(1, t) = 0 = uxx(1, t)
u(x, 0) = f(x) , ut(x, 0) = g(x) 0 < x < 1
Separating variables, let u(x, t) = X(x)T (t). Then
− 1
α2T
d2T
dt2=
1
X
d4X
dx4= λ ⇒ d2T
dt2+ α2λT = 0 ,
1

Figure 1: Visualizing beam boundary conditions at x = 0:(a) free-end b.c.(b) clamped-end b.c. (c) simply-supported/hinged-end b.c.
andd4Xdx4− λX = 0 0 < x < 1
X(0) = X(1) = d2Xdx2
(0) = d2Xdx2
(1) = 0 .
(2)
Without going into a detailed argument, assume the eigenvalues of thisproblem are real. Let a solution to (2) be λ,X(x). Multiply the equation(2) by X and integrate. Since∫ 1
0
Xd4X
dx4dx = X
d3X
dx3|10 −
dX
dx
d2X
dx2|10 +
∫ 1
0
(d2X
dx2)2dx =
∫ 1
0
(d2X
dx2)2dx ,
then∫ 1
0
(d2X
dx2)2dx− λ
∫ 1
0
X2dx = 0 ⇒ λ =
∫ 1
0
(d2X
dx2)2dx/
∫ 1
0
X2dx .
Thus, λ ≥ 0. If λ = 0, then X(x) = Ax3+Bx2+Cx+D, so X ′′ = 6Ax+2B.X(0) = D = 0, X ′′(0) = 2B = 0, X ′′(1) = 6A = 0, X(1) = C = 0,so X ≡ 0. Hence, λ = 0 can not be an eigenvalue. For λ > 0, T (t) =a cos(α
√λt) + b sin(α
√λt), and for the EVP, let X = erx; upon substituting
into the equation, r4 − λ = 0, or r2 = ±√λ, or r = ±λ1/4,±iλ1/4. For
convenience, let µ = λ1/4. Then X(x) = A cos(µx)+B sin(µx)+Ccosh(µx)+Dsinh(µx). Now X(0) = A + C = 0, 0 = X ′′(0) = −µ2A + µ2C = −2µ2A,so A = C = 0. Also, X(1) = 0 = X ′′(1) implies D = 0, so finally we haveB sin(µ) = 0. Since B 6= 0 (otherwise X ≡ 0), so sin(µ) = 0. This gives
µ = µn = nπ, for n = 1, 2, . . . (so λ1/2n = µ2
n = n2π2). Hence, X(x) =
2

Figure 2: Beam boundary conditions for examples/exercises:(a) simply-supported b.c.s at both ends; (b) beam clamped at the x = 0 end, freeat the x = 1 end
Xn(x) = sin(nπx)⇒
u(x, t) =∞∑n=1
an cos(αn2π2t) + bn sin(αn2π2t) sin(nπx) .
Also,
f(x) = u(x, 0) =∑∞
n=1 an sin(nπx) → an = 2∫ 1
0f(x) sin(nπx)dx
g(x) = ut(x, 0) =∑∞
n=1 αn2π2bn sin(nπx) → bn = 2
αn2π2
∫ 1
0g(x) sin(nπx)dx .
Exercise: For the above problem find u(x, t) whena) f(x) = g(x) = sin(πx);b) f(x) = 1− x2, g(x) ≡ 0.
Exercise: Suppose the above beam is “weakly” damped, that is, it is stillsimply supported on both ends (see figure 2(a)), but now
utt + kut + α2uxxxx = 0 .
Assume 0 < k < 2απ2, and show that
u(x, t) = e−kt/2∞∑n=1
an cos(ωnt) + bn sin(ωnt) sin(nπx) ,
where ωn :=√
4α2λn − k2/2.
3

Exercise: Clamped end on the left, free end on the right (see figure 2(b)):
utt = −α2uxxxx 0 < x < 1 , t > 0
u(0, t) = 0 = ux(0, t) t > 0
uxx(1, t) = 0 = uxxx(1, t)
u(x, 0) = f(x) , ut(x, 0) = g(x) 0 < x < 1
1. Obtain the fourth-order EVP and show that λ = 0 can not be aneigenvalue.
2. Obtain the transcendental relation that µ = λ1/4 satisfies, and showthere is an infinite number of solutions, 0 < µ1 < µ2 < . . .. Thus, theassociated eigenfunctions have the form
Xn(x) = cos(µnx)−cosh(µnx)+sin(µn)− sinh(µn)
cos(µn) + cosh(µn)(sin(µnx)−sinh(µnx)) .
3. Assume Xn are orthogonal set of functions. Write the form of u(x, t)and formulas for the coefficients.
Exercise: Consider a model for a thin beam that has length 1, is clamped atx = 0, and is simply supported at x = 1. Assume general initial conditions.Find the transcendental relation that determines the eigenvalues and writeout the associated eigenfunctions (no arbitrary constants). Then solve the tequation and write the series solution for the displacement u.
Exercise: Consider a flexible beam of unit length clamped at both ends.Hence, small transverse wave motion in the beam can be modeled by
utt + α2uxxxx = 0 0 < x < 1 , t > 0
u(0, t) = 0 = u(0, t) t > 0
ux(1, t) = 0 = ux(1, t)
u(x, 0) = f(x) , ut(x, 0) = g(x) 0 < x < 1 .
4

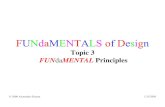
Figure 3: Rotating beam for the exercise below
Given a solution u(x, t), show that the energy functional
E(t) :=1
2
∫ 1
0
(ut)2 + α2(uxx)2dx
is conserved; that is, E is independent of t for all t ≥ 0.
Exercise: Consider a special case of a rotor, i.e. an Euler-Bernoulli beamthat is rotating. If somehow we can have it vibrate only in one plane and besimply supported at both ends, then we might consider a model of the form
utt + α2uzzzz − Ω2u = 0 0 < z < l , t > 0
u(0, t) = 0 = uzz(0, t) t > 0
u(l, t) = 0 = uzz(l, t) .
This is similar to the first example except for the Ω-spin term. How doesthis affect the vibrating modes (eigenvalues) of the problem, and what mightyou surmise about adding spin to the beam this way?
5

Remark: In thinking about the model for a piano string almost everyonemodels it as an ideal string
ρA∂2u
∂t2= T
∂2u
∂x20 < x < l ,
where, as usual, T is the tension, ρ is the linear density, and A is the (uniform)cross-sectional area of the string. Howison 1 commented that a real pianostring has a small bending stiffness, so a combination of the string modeland the beam model might be a more appropriate model for piano wiredisplacement:
ρA∂2u
∂t2− T ∂
2u
∂x2+ EAk2
∂4u
∂x4= 0 ,
where E is Young’s modulus 2 and k is radius of gyration of the cross-section.(For example, for a cross-section that is circular with radius a, k2 = a2/2.)
To get a better idea of the relative size of this new term, we need tonon-dimensionalize (that is, scale) the equation. Let x = x/l, so ∂/∂x =(1/l)∂/∂x, etc. by the chain rule. So we are scaling the spatial variable bythe length of the string. Similarly, let t = ct/l, where c2 = T/ρA, so that chas units of length/time, i.e. of speed. Thus x and t are dimensionless. Nowlet u(x, t) = u(x, t), substitute the derivatives into the above equation, thenmultiply through by l2/ρAc2 and drop the tilde notation (for convenience).Thus,
∂2u
∂t2− ∂2u
∂x2+ ε
∂4u
∂x4= 0 where ε :=
EAk2
T l2.
Example: Typical values would be a = 1 mm, E ≈ 2 × 1011 (SI units),ρ = 7800, l = 1 m, T = 1000 N . This gives ε ≈ 3.1 × 10−4, quite small,but the term is negligible and can be dropped only if the fourth-order termremains small over the whole domain, except perhaps right at the spatialboundary.
20.2 Periodic forcing of a thin beam
Historical note: Broughton bridge (Manchester, England), 1831This suspension bridge collapsed when soldiers were marching across it. The
1S. Howison, Practical Applied Mathematics: Modeling, Analysis, Approxi-mation, Cambridge Univ. Press, 2005
2Young’s modulus, sometimes called the elastic modulus, is a measure of stress/strain.
6

Figure 4: Cartoon of my Florida draw bridge for the periodically forced beamproblem.
collapse could have been caused either by the weight of the soldiers exceed-ing the capacity of the bridge, or their synchronized steps causing a beatingor resonance situation associated with the bridge. But, as a consequence ofthe incident, all armies break cadence crossing bridges. However, this hasnot been followed necessarily by marching bands. The author experienced abeating situation with a steel draw bridge marching across it with a band inthe Orange Bowl Parade in Miami, Florida when he was in high school (seefigure 4). We basically fell all over each other. The experience motivates thenext problem.
Example: Consider the problem
ρutt = −EIuxxxx + a cos(ωt)φm(x) 0 < x < l , t > 0 (3)
where φm(x) is one of the eigenfunctions of the problem’s EVP to be deter-mined. Also
u(x, 0) = 0 = ut(x, 0) 0 < x < lu(0, t) = 0 = uxx(0, t) t > 0uxx(l, t) = 0 = uxxx(l, t) t > 0
(4)
Exercise: Show that the non-forced, steady state solution is u(x) = Ax,where A is an arbitrary constant.
7

Homogeneous problem:ρutt = −EIuxxxx 0 < x < l
u(0, t) = 0 = uxx(0, t) t > 0
uxx(l, t) = 0 = uxxx(l, t) .
With u(x, t) = T (t)φ(x), we have ρEI
1Td2Tdt2
= − 1φd4φdx4
= −λ, so
d4φdx4− λφ = 0 0 < x < l
φ(0) = 0 = d2φdx2
(0)
d2φdx2
(l) = 0 = d3φdx3
(l)
Assume λ ≥ 0. For the characteristic equation, φ = erx, we obtain r4− λ, orr2 = ±
√λ, which gives r = ±λ1/4, ±iλ1/4, assuming λ > 0. If λ = 0, from
the exercise above, φ = φ0(x) = Ax, that is, 0 is an eigenvalue. Now forλ > 0, define µ := λ1/4. Then φ(x) = Acosh(µx) +Bsinh(µx) +C cos(µx) +D sin(µx). Also, φ′′(x) = µ2Acosh(µx)+Bsinh(µx)−C cos(µx)−D sin(µx).So φ(0) = A + C and φ′′(0) = µ2(A − C). Hence, A = C = 0, so φ′′(x) =µ2Bsinh(µx)−D sin(µx) and φ′′′(x) = µ3Bcosh(µx)−D cos(µx). Thus
φ′′(l) = 0 = µ2Bsinh(µl)−D sin(µl)φ′′′(l) = 0 = µ3Bcosh(µl)−D cos(µl) .
This can be written in matrix form as sinh(µl) − sin(µl)
cosh(µl) − cos(µl)
B
D
=
0
0
Since B,D can not be zero, we need the determinent of the matrix to be 0 fora non-zero solution vector. Hence, cosh(µl) sin(µl)− sinh(µl) cos(µl) = 0, or
tanh(µl) = tan(µl) .
8

Figure 5: Sketch of graph of tanh(y) versus tan(y), showing the orderedsequence of positive eigenvalues.
Let y = µl, then from figure 5 we see that there is an ordered increasing setof solutions yk, k = 1, 2, . . .. For “large” k, yk ∼ arctan(1) + kπ = π/4 + kπ,and yk = µkl, or λk = (yk/l)
4. Now Bsinh(yk)−D sin(yk) = 0, so B = Bk =sin(yk)sinh(yk)
Dk, which gives, up to a multiplicative constant,
φn(x) = sin(µnx) +sin(µnl)
sinh(µnl)sinh(µnx) .
So, in equation (3) the spatial part of the forcing is one of these eigenfunc-tions.
Now, for equation (3), let u(x, t) = T (t)φm(x); then,
ρd2T
dt2(t)φm(x) = −EIT (t)
d4φmdx4
(x) + a cos(ωt)φm(x) ,
but since d4φm/dx4 = λmφm, then
d2Tdt2
+ α2λmT = aρ
cos(ωt) t > 0
T (0) = 0 = dTdt
(0) .
Case 1: ω2 6= EIρλm
Thus, the right side function is not a solution to the homogeneous equation.
9

Figure 6: Beating behavior as discussed in case 1 of the periodically forcedbeam problem.
So let Tpart(t) = K cos(ωt); upon substituting into the equation, we have
−ω2K + (EI/ρ)λmK = a/ρ. Define ω2m := EI
ρλm. Then K = a/ρ
ω2m−ω2 , so
T (t) = A cos(ωmt) +B sin(ωmt) +a/ρ
ω2m − ω2
cos(ωt) .
Now T (0) = A+ a/ρω2m−ω2 = 0 and dT
dt(0) = ωmB = 0, so
T (t) =a/ρ
ω2m − ω2
cos(ωt)− cos(ωmt)
= [2a/ρ
ω2m − ω2
sin(ωm − ω
2t)] sin(
ωm + ω
2t) .
after use of a trig addition formula. In the interesting case where 0 <|ωm − ω| << 1, we have a large amplitude factor multiplying a “large”frequency sin(ωm+ω
2t), namely the term in square brackets, with this ampli-
tude having “small” frequency = large period (see figure 6).
Case 2: ω2 = ω2m
In this case the forcing function is a solution to the homogeneous equation,so
d2T
dt2+ ω2T =
a
ρcos(ωt)
If we let Tpart(t) = K1t cos(ωt)+K2t sin(ωt) via the undetermined coefficientmethod, then upon substituting this into the equation, and using the initial
10

conditions, we obtain K1 = 0, and
T (t) =at
2ρωsin(ωt) .
That is, we have the resonance condition of having the amplitude go un-bounded as t → ∞. Finally, in this case u(x, t) = at
2ρωsin(ωt)φm(x). (This
case is not realistic since the model assumptions do not allow for large am-plitude motion.)
11