1 PROOF OF LEMMA 3 2 PROOF OF THEOREM 5cs-people.bu.edu/jmzhang/BMS/BMS_PAMI_supp.pdf · 2015. 8....
4
1 1 PROOF OF LEMMA 3 For convenience, let h + I (S, t) , min π∈Π S,t β + I (π), h - I (S, t) , max π 0 ∈Π S,t β - I (π 0 ), β I (π) , β I (π) + - β I (π) - . Therefore, ϕ I (S, t)= h + I (S, t) - h - I (S, t) and d I (S, t)= min π∈Π S,t β I (π). We first restate Lemma 5 in our paper as follows. Lemma 1. Given an N -level image F and a seed set S, the distance transform Θ S ϕ (F ) obeys the linear-threshold superposition: Θ S ϕ (F )= N-1 X k=0 Θ S ϕ (B F k ). (1) Proof: To avoid unnecessary clutter in notation, we use Θ to denote Θ S ϕ , and B k to denote B F k . Recall that for each pixel t, Θ(B k )(t)= h + B k (S, t) - h - B k (S, t). When B k (t)=1, we have h + B k (S, t)=1. In this case, Θ(B k )(t)=0 iff there is a path π joining a seed s ∈ S and t, such that β - B k (π)=1. This means that π is in the white set of B k , and it follows that β - F (π) >k. Thus, when B k (t)=1, Θ(B k )(t)=0 iff there exists a path π joining a seed s and t, where β - F (π) >k. Namely, when B k (t)=1, Θ(B k )(t)=0 ⇐⇒ k<h - F (S, t). Since k<h - F (S, t) indicates B k (t)=1, it follows that B k (t)=1 ∧ Θ(B k )(t)=0 ⇐⇒ k<h - F (S, t). Similarly, we have B k (t)=0 ∧ Θ(B k )(t)=0 ⇐⇒ k ≥ h + F (S, t). It follows that Θ(B k )(t)=0 ⇐⇒ k<h - F (S, t) ∨ k ≥ h + F (S, t). Note that Θ(B k )(t) is either 0 or 1. Therefore, Θ(B k )(t)=1 ⇐⇒ h - F (S, t) ≤ k<h + F (S, t). Then for each t, N-1 X k=0 Θ(B k )(t)= N-1 X k=0 δ ( h - F (S, t) ≤ k<h + F (S, t) ) = h + F (S, t) - h - F (S, t) = Θ(F ). 2 PROOF OF THEOREM 5 2.1 Preliminaries We first introduce several concepts and results that are necessary for our proof of Theorem 5 in our paper. In particular, we will prove a generalized version of Alexander’s lemma. 2.1.1 Alexander’s Lemma The following is a version of Alexander’s lemma [1]. Lemma 2. Let s and t be two points in the topological space D = [0, 1] 2 , and P and Q be two disjoint closed sets in D. If there exist a path from s to t in D \ P and a path from s to t in D \ Q, then there exists a path from s to t in D \ (P ∪ Q). Proof: See Alexander’s lemma for simply connected spaces in [2] and Theorem 8.1, p. 100 in [1]. An intuitive interpretation is shown in Fig. 1(a). As P and Q are disjoint closed sets, they cannot “touch” each other’s boundaries. Then if neither P nor Q can block s from t, P ∪ Q cannot, either, The following result is a generalization of Lemma 2. An interpretation is shown in Fig. 1(b). Theorem 3. Consider the topological space D = [0, 1] 2 . Let S ⊂ D be a connected set, t ∈ D a point, and P and Q two disjoint closed sets in D. If there exist a path from S to t in D \ P and a path from S to t in D \ Q, then there exists a path from S to t in D \ (P ∪ Q). Proof: We will first modify P and Q while keeping the preceding assumptions about P and Q unchanged. Step 1. Let P denote D \ P and C t P ⊂ P denote the connected component of P that contains t. Then we change P and Q to P 1 and Q 1 respectively, s.t. P 1 = P ∪ ( P \ C t P ) , Q 1 = Q \ ( P \ C t P ) . Step 2. Following the same notations, we make similar changes to P 1 and Q 1 : Q 2 = Q 1 ∪ Q 1 \ C t Q1 , P 2 = P 1 \ Q 1 \ C t Q1 . Fig. 2 gives an example to show how the above steps work. In this example, each step fills the holes inside one of the sets. Generally, as we shall prove in the following, these two steps make the complement of P 2 ∪ Q 2 a path connected set that contains t. We now show that the assumptions for P and Q are inherited by P 2 and Q 2 . For this purpose, it suffices to show that these assumptions hold for P 1 and Q 1 , because step 2 is a symmetric operation of step 1. First, we show P 1 and Q 1 are two disjoint closed set in D. It is straightforward to see that P 1 and Q 1 are disjoint. D = [0, 1] 2 is locally connected, and P = D\P is open in D. Each connected component of an open
Transcript of 1 PROOF OF LEMMA 3 2 PROOF OF THEOREM 5cs-people.bu.edu/jmzhang/BMS/BMS_PAMI_supp.pdf · 2015. 8....

1
1 PROOF OF LEMMA 3
For convenience, let
h+I (S, t) , min
π∈ΠS,t
β+I (π),
h−I (S, t) , maxπ′∈ΠS,t
β−I (π′),
βI(π) , βI(π)+ − βI(π)−.
Therefore, ϕI(S, t) = h+I (S, t)−h−I (S, t) and dI(S, t) =
minπ∈ΠS,tβI(π).
We first restate Lemma 5 in our paper as follows.
Lemma 1. Given an N -level image F and a seed set S,the distance transform ΘS
ϕ(F) obeys the linear-thresholdsuperposition:
ΘSϕ(F) =
N−1∑k=0
ΘSϕ(BFk ). (1)
Proof: To avoid unnecessary clutter in notation, we useΘ to denote ΘS
ϕ, and Bk to denote BFk .Recall that for each pixel t,
Θ(Bk)(t) = h+Bk
(S, t)− h−Bk(S, t).
When Bk(t) = 1, we have h+Bk
(S, t) = 1. In this case,Θ(Bk)(t) = 0 iff there is a path π joining a seed s ∈ Sand t, such that β−Bk
(π) = 1. This means that π is in thewhite set of Bk, and it follows that β−F (π) > k. Thus,when Bk(t) = 1, Θ(Bk)(t) = 0 iff there exists a pathπ joining a seed s and t, where β−F (π) > k. Namely,when Bk(t) = 1,
Θ(Bk)(t) = 0⇐⇒ k < h−F (S, t).
Since k < h−F (S, t) indicates Bk(t) = 1, it follows that
Bk(t) = 1 ∧Θ(Bk)(t) = 0⇐⇒ k < h−F (S, t).
Similarly, we have
Bk(t) = 0 ∧Θ(Bk)(t) = 0⇐⇒ k ≥ h+F (S, t).
It follows that
Θ(Bk)(t) = 0⇐⇒ k < h−F (S, t) ∨ k ≥ h+F (S, t).
Note that Θ(Bk)(t) is either 0 or 1. Therefore,
Θ(Bk)(t) = 1⇐⇒ h−F (S, t) ≤ k < h+F (S, t).
Then for each t,
N−1∑k=0
Θ(Bk)(t) =
N−1∑k=0
δ(h−F (S, t) ≤ k < h+
F (S, t))
= h+F (S, t)− h−F (S, t)
= Θ(F).
2 PROOF OF THEOREM 52.1 PreliminariesWe first introduce several concepts and results thatare necessary for our proof of Theorem 5 in our paper.In particular, we will prove a generalized version ofAlexander’s lemma.
2.1.1 Alexander’s LemmaThe following is a version of Alexander’s lemma [1].
Lemma 2. Let s and t be two points in the topologicalspace D = [0, 1]2, and P and Q be two disjoint closed setsin D. If there exist a path from s to t in D \P and a pathfrom s to t in D \Q, then there exists a path from s to tin D \ (P ∪Q).
Proof: See Alexander’s lemma for simply connectedspaces in [2] and Theorem 8.1, p. 100 in [1].
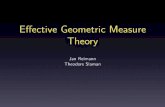
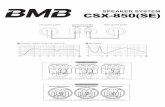
An intuitive interpretation is shown in Fig. 1(a). AsP and Q are disjoint closed sets, they cannot “touch”each other’s boundaries. Then if neither P nor Q canblock s from t, P ∪Q cannot, either,
The following result is a generalization of Lemma2. An interpretation is shown in Fig. 1(b).
Theorem 3. Consider the topological space D = [0, 1]2.Let S ⊂ D be a connected set, t ∈ D a point, and P andQ two disjoint closed sets in D. If there exist a path fromS to t in D \ P and a path from S to t in D \ Q, thenthere exists a path from S to t in D \ (P ∪Q).
Proof: We will first modify P and Q while keeping thepreceding assumptions about P and Q unchanged.
Step 1. Let P denote D \P and CtP⊂ P denote the
connected component of P that contains t. Then wechange P and Q to P1 and Q1 respectively, s.t.
P1 = P ∪(P \ Ct
P
),
Q1 = Q \(P \ Ct
P
).
Step 2. Following the same notations, we makesimilar changes to P1 and Q1:
Q2 = Q1 ∪(Q1 \ CtQ1
),
P2 = P1 \(Q1 \ CtQ1
).
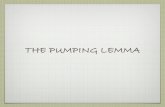
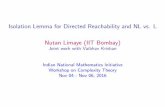
Fig. 2 gives an example to show how the abovesteps work. In this example, each step fills the holesinside one of the sets. Generally, as we shall prove inthe following, these two steps make the complementof P2 ∪Q2 a path connected set that contains t.
We now show that the assumptions for P and Q areinherited by P2 and Q2. For this purpose, it sufficesto show that these assumptions hold for P1 and Q1,because step 2 is a symmetric operation of step 1.
First, we show P1 and Q1 are two disjoint closed setin D. It is straightforward to see that P1 and Q1 aredisjoint. D = [0, 1]2 is locally connected, and P = D\Pis open in D. Each connected component of an open

2
st
P
Q
(a)
S
t
P
Q
(b)
Fig. 1: An illustration of Lemma 2 and Theorem 3. P and Q aretwo disjoint closed sets in [0, 1]2. In (a), there is a path from s tot which does not meet P , and a path from s to t which does notmeet Q (see the two dash lines). Then there exist a path (the solidline) from s to t which does not meet P ∪Q. In (b), a generalizedscenario is shown, where the seed set S is not necessarily singleton,but a connected set. If S and t can be connected by paths that donot meet P and Q respectively, then S and t can be connected bya path that does not meet P ∪Q.
t
P
Q
(a)
t
P
Q
1
1
(b)
t
P
Q
2
2
(c)
Fig. 2: An example to show the effects of the two modificationsteps. In (a), the set shown in red, P , and the set shown in green,Q, are two disjoint closed set in [0, 1]2. After step 1, the hole insideP is filled (see P1 in (b)). Similarly, after step 2, the hole insideQ1 is filled (see Q2 in (3)). Generally, these two steps make thecomplement of P2 ∪Q2 a path connected set that contains t.
set in a locally connected space is open in that space[3] (Theorem 25.3 at p. 161). It follows that P \ Ct
Pis
an open subset in D, because P \ CtP
is the union ofall the components of P except Ct
P. Thus, Q1 is closed
in D. Furthermore, it is easy to see that P1 = D \CtP
,so P1 is closed in D.
Second, we show there exist a path from S to t inD \P1 and a path from S to t in D \Q1. As discussedabove, D \ P1 = Ct
P. Recall that Ct
Pis the connected
component of D \ P that contains t. Therefore, thepath from S to t in D \P must be included in D \P1.Moreover, the path from S to t in D \ Q is includedin D \Q1 for D \Q ⊂ D \Q1.
Similarly, P2 and Q2 have all the properties dis-cussed above. Now we show that D\(P2∪Q2) is pathconnected. It is easy to verify the following facts:
P ∪Q ⊂ P2 ∪Q2, (2)
P 1 = CtP, (3)
P2 = P1 ∩ CtQ1, (4)
Q2 = CtQ1. (5)
Then we have
D \ (P2 ∪Q2) = P2 ∪Q2
= P 2 ∩Q2
= P1 ∩ CtQ1∩ Ct
Q1
=(P 1 ∪ CtQ1
)∩ Ct
Q1
= P 1 ∩Q2
Therefore, for each x ∈ D\(P2∪Q2), we have x ∈ P 1 =CtP
(see Eqn. 3). Note that every open connected setin a locally path connected space is path connected[3] (Exercise 4 at p. 162). Therefore, P 1 is also pathconnected, and x and t are path connected in P 1. Itfollows that there exists a path joining x and t in P 2,because P 1 ⊂ P 2. Similarly, x ∈ D \ (P2 ∪Q2) ⇒ x ∈Q2 = Ct
Q1(see Eqn. 5), so there exists a path joining
x and t in Q2. Recall that P2 and Q2 are two disjointclosed sets in D. According to Lemma 2, there exists apath joining x and t in D\(P2∪Q2). Thus, D\(P2∪Q2)is path connected.
Since S is connected, there exists a point s ∈ Scontained in D \ (P2 ∪ Q2). To see this, recall thatthere exist a path in P 2 joining S and t, and a path inQ2 joining S and t, so S \ P2 6= ∅ and S \ Q2 6= ∅.If S ⊂ P2 ∪ Q2, then S can be divided into twodisjoint nonempty closed sets in S (S∩P2 and S∩Q2),contradicting the assumption that S is connected.D \ (P2 ∪ Q2) is path connected, so there is a path
from s to t in D\(P2∪Q2). This path must be includedin D \ (P ∪ Q), because (P ∪ Q) ⊂ (P2 ∪ Q2). Thus,there is a path from S to t in D \ (P ∪Q).
2.1.2 Hyxel and Supercover
The following concepts of hyxel and supercover arefor k-D digital images. A k-D digital image I can berepresented by a pair (V, I), where V ⊂ Zk is a set ofregular grid points, I : V → R is a function that mapseach grid point x ∈ V to a real value I(x). Moreover,we assume k-D digital images are rectangular, i.e.V =
∏ki=1{1, · · · , ni}. In particular, we are interested
in the case when k = 2.Next, we introduce hyxel [4], [5], a useful concept
in digital topology.
Definition 1. A hyxel Hx for a grid point x in a k-Dimage I = (V, I) is a unit k-D cube centered at t, i.e.
Hx =
[x1 −
1
2, x1 +
1
2
]× · · · ×
[xk −
1
2, xk +
1
2
],
where x = (x1, · · · , xk) ∈ V ⊂ Zk. Hyxels are thegeneralization of pixels in the 2-D images.
Since hyxels and grid points in Zk have a one-to-one correspondence, the connectivity of a set of hyxelscan be induced by the adjacency relationship betweengrid points.

3
Definition 2. A sequence of hyxels is a nadj-path if thecorresponding sequence of grid points is a path interms of n-adjacency. A set of hyxels is nadj-connectedif any pair of hyxels in this set are connected by anadj-path contained in this set.
Definition 3. The supercover S(M) of a point set Min Rk is the set of all hyxels that meet M .
The following is a result given in [4].
Lemma 4. Let M ⊂ Rk be a connected set. Then S(M)is 2kadj-connected.
Proof: See [4], [5]. Note that 2kadj-connectivity is equiv-alent to the concept of (k− 1)-connectivity defined in[4].
2.2 Proof of Theorem 5We first restate Theorem 5 in our paper as follows.
Definition 4 (Definition 2 in our paper). Given agrayscale image I, εI = maxi,j |I(i)−I(j)| is the max-imum local difference, where pixel i and j are arbitrary8-adjacent neighbours.
Theorem 5 (Theorem 5 in our paper). Given a 2-Ddigital image I with 4-connected paths, if the seed set S isconnected, then ΘS
ϕ(I) approximates the MBD transformΘSd (I) with errors no more than 2εI , i.e. for each pixel t,
0 ≤ dI(S, t)− ϕI(S, t) ≤ 2εI . (6)
Proof: First we need to show that in the continuoussetting I = (D, I), where D ⊂ [0, 1]2, I : D → R iscontinuous, and the seed set S is connected, ϕI(S, t)
and dI(S, t) are equivalent (compare Theorem 1 in[6]).
As discussed in [6], in the continuous setting, thedefinition of ϕI(S, t) and dI(S, t) becomes
ϕI(S, t) = h+
I(S, t)− h−
I(S, t)
= infπ∈ΠS,t
β+
I(π)− sup
π′∈ΠS,t
β−I
(π′), (7)
dI(S, t) = infπ∈ΠS,t
βI(π). (8)
In order to prove dI(S, t) = ϕI(S, t), we need to showthat for any ε > 0, there exists a path π ∈ ΠS,t suchthat
h−I
(S, t)− ε < minxI(π(x)) ≤ max
xI(π(x)) <
h+
I(S, t) + ε.
(9)
Equivalently, we need to show there exists a pathπ ∈ ΠS,t in D \ (P ∪Q), where P = {x ∈ D : I(x) ≤h−I
(S, t)− ε} and Q = {x ∈ D : I(x) ≥ h+
I(S, t)+ ε}. It
is easy to see that P and Q are two disjoint closed setin D, and there exist paths from S to t in D \ P andD \Q respectively (see the definition of h+
I(S, t) and
h−I
(S, t) in Eqn. 7). According to Theorem 3, Eqn. 9 is
proved, and thus ϕI(S, t) = dI(S, t) in the continuoussetting.
Returning to the proof of Theorem 5, we do thesame trick as in [6] to translate the digital versionof the problem to the continuous setting. We canget a continuous image I = {D, I} by bilinearlyinterpolating the digital image I = {V, I}. Note thatthe seed set S in I is the union of the hyxels (pixels)of the 4adj-connected seeds in I. Thus, S is connectedin D. According to Eqn. 9, for any ε > 0, there existsa path π′ ∈ ΠS,t such that
h−I
(S, t)− ε < minxI(π′(x)) ≤ max
xI(π′(x)) <
h+
I(S, t) + ε.
(10)
Then the supercover voxelization of π′ is applied. Ac-cording to Lemma 4, the resultant pixel set includes a4adj-path π that joins S and t. Because |I(x)−I(y)| ≤ εIfor any y ∈ D that is covered by hyxel (pixel) Hx, wehave
h−I
(S, t)− εI − ε < minxI(π(x)) ≤ max
xI(π(x)) <
h+
I(S, t) + εI + ε.
(11)
Similarly, we have
h−I
(S, t)− εI − ε < h−I (S, t) ≤ h+I (S, t) <
h+
I(S, t) + εI + ε.
(12)
As ε→ 0, Eqn. 11 indicates
dI(S, t) ≤ ϕI(S, t) + 2εI , (13)
and Eqn. 12 indicates
ϕI(S, t) ≤ ϕI(S, t) + 2εI . (14)
Each discrete 4adj-path on the digital image I hasa continuous counterpart in I, which is constructedby linking the line segments between consecutivepixels on the discrete path. It is easy to see thatthe values on this continuous path are the linearinterpolations of the values on the discrete path, forI is obtained by bilinearly interpolating I. Thus,dI(S, t) ≤ dI(S, t) and ϕI(S, t) ≤ ϕI(S, t). Moreover,recall that ϕI(S, t) = dI(S, t), and ϕI(S, t) is a lowerbound of dI(S, t) [6]. Then we have
ϕI(S, t) ≤ ϕI(S, t) ≤ dI(S, t) ≤ ϕI(S, t) + 2εI . (15)
It immediately follows that
0 ≤ dI(S, t)− ϕI(S, t) ≤ 2εI . (16)
Remark. The above result can be easily generalized tok-D images. Its proof is analogous to the ones in [6],[7]. The basic idea is to reduce the problem in the highdimension to the 2-D case via homotopy [6].

4
REFERENCES[1] M. H. A. Newman, Elements of the topology of plane sets of points.
University Press, 1939.[2] M. Kallipoliti and P. Papasoglu, “Simply connected homoge-
neous continua are not separated by arcs,” Topology and itsApplications, vol. 154, no. 17, pp. 3039–3047, 2007.
[3] J. R. Munkres, Topology. Prenctice Hall, 2000.[4] V. E. Brimkov, E. Andres, and R. P. Barneva, “Object discretiza-
tions in higher dimensions,” Pattern Recognition Letters, vol. 23,no. 6, pp. 623–636, 2002.
[5] D. Cohen-Or and A. Kaufman, “Fundamentals of surface vox-elization,” Graphical models and image processing, vol. 57, no. 6,pp. 453–461, 1995.
[6] R. Strand, K. C. Ciesielski, F. Malmberg, and P. K. Saha, “Theminimum barrier distance,” CVIU, vol. 117, no. 4, pp. 429–437,2013.
[7] K. C. Ciesielski, R. Strand, F. Malmberg, and P. K. Saha,“Efficient algorithm for finding the exact minimum barrierdistance,” CVIU, vol. 123, pp. 53–64, 2014.