Ορισμός & Ανίχνευση Οπτικών Οροσήμων για Πλοήγηση σε...
16
ΕΚΕΦΕ «Δημόκριτος» ΕΚΕΦΕ «Δημόκριτος» Ινστιτούτο Πληροφορικής & Τηλεπικοινωνιών Ινστιτούτο Πληροφορικής & Τηλεπικοινωνιών Ορισμός & Ανίχνευση Οπτικών Οροσήμων για Πλοήγηση σε εσωτερικούς χώρους Δ. Κοσμόπουλος – Κ. Χανδρινός Δ. Κοσμόπουλος – Κ. Χανδρινός Email: {dkosmo, kostel}@iit.demokritos.gr Email: {dkosmo, kostel}@iit.demokritos.gr Παρουσίαση στο πλαίσιο του Παρουσίαση στο πλαίσιο του Δεύτερου Πανελλήνιου Συνεδρίου Τεχνητής Νοημοσύνης Δεύτερου Πανελλήνιου Συνεδρίου Τεχνητής Νοημοσύνης Θεσσαλονίκη, 12 Απριλίου Θεσσαλονίκη, 12 Απριλίου 200 200 2 2
description
ΕΚΕΦΕ «Δημόκριτος» Ινστιτούτο Πληροφορικής & Τηλεπικοινωνιών. Ορισμός & Ανίχνευση Οπτικών Οροσήμων για Πλοήγηση σε εσωτερικούς χώρους. Δ. Κοσμόπουλος – Κ. Χανδρινός Email: {dkosmo, kostel}@iit.demokritos.gr. - PowerPoint PPT Presentation
Transcript of Ορισμός & Ανίχνευση Οπτικών Οροσήμων για Πλοήγηση σε...

ΕΚΕΦΕ «Δημόκριτος»ΕΚΕΦΕ «Δημόκριτος»
Ινστιτούτο Πληροφορικής & ΤηλεπικοινωνιώνΙνστιτούτο Πληροφορικής & Τηλεπικοινωνιών
Ορισμός & Ανίχνευση Οπτικών Οροσήμων για Πλοήγηση σε
εσωτερικούς χώρους Δ. Κοσμόπουλος – Κ. ΧανδρινόςΔ. Κοσμόπουλος – Κ. Χανδρινός
Email: {dkosmo, kostel}@iit.demokritos.grEmail: {dkosmo, kostel}@iit.demokritos.gr
Παρουσίαση στο πλαίσιο τουΠαρουσίαση στο πλαίσιο τουΔεύτερου Πανελλήνιου Συνεδρίου Τεχνητής ΝοημοσύνηςΔεύτερου Πανελλήνιου Συνεδρίου Τεχνητής Νοημοσύνης
Θεσσαλονίκη, 12 ΑπριλίουΘεσσαλονίκη, 12 Απριλίου 200 20022

2
Το πρόβλημα
Πλοήγηση ρομποτικής Πλοήγηση ρομποτικής πλατφόρμας με αξιοποίηση πλατφόρμας με αξιοποίηση
οπτικής πληροφορίας οπτικής πληροφορίας
(υπολογιστική όραση)(υπολογιστική όραση)

3
Αυτόνομη ρομποτική πλοήγηση Παρά τον όγκο εργασίαςΠαρά τον όγκο εργασίας, , η αυτόνομη η αυτόνομη
ρομποτική πλοήγηση ρομποτική πλοήγηση χωρίς περιορισμούς χωρίς περιορισμούς δεν δεν έχει λυθείέχει λυθεί
Εξαιρετικά αποτελέσματα για ελεγχόμενα Εξαιρετικά αποτελέσματα για ελεγχόμενα περιβάλλονταπεριβάλλοντα
Ανάγκη να λυθούν πολλά διαπλεκόμενα Ανάγκη να λυθούν πολλά διαπλεκόμενα προβλήματαπροβλήματα, , όπωςόπως: : Μοντελοποίηση περιβάλλοντοςΜοντελοποίηση περιβάλλοντος Αντίληψη περιβάλλοντος & αυτογνωσία Αντίληψη περιβάλλοντος & αυτογνωσία Αναγνώριση στόχουΑναγνώριση στόχου Εκτέλεση σχεδιασμούΕκτέλεση σχεδιασμού / / επιβεβαίωση κίνησηςεπιβεβαίωση κίνησης

4
Εύρος λύσεων
ΛύσειςΛύσεις Μετρική προσέγγισηΜετρική προσέγγιση Τοπολογική προσέγγισηΤοπολογική προσέγγιση Σύντηξη πληροφορίας από αισθητήρεςΣύντηξη πληροφορίας από αισθητήρες Διαμόρφωση περιβάλλοντοςΔιαμόρφωση περιβάλλοντος Χρήση ολικής οπτικής πληροφορίαςΧρήση ολικής οπτικής πληροφορίας Μοντελοποίηση περιβάλλοντοςΜοντελοποίηση περιβάλλοντος......

5
Πλοήγηση με οπτική πληροφορία
Η πλοήγηση με οπτική πληροφορία Η πλοήγηση με οπτική πληροφορία ακολουθεί συνήθως τοπολογική προσέγγισηακολουθεί συνήθως τοπολογική προσέγγιση:: Κατασκευάζει έναν τοπολογικό χάρτη του κόσμου Κατασκευάζει έναν τοπολογικό χάρτη του κόσμου Προσδιορίζει την τρέχουσα θέση ως προς χάρτηΠροσδιορίζει την τρέχουσα θέση ως προς χάρτη Υποστηρίζει την πλοήγηση με αναπαράσταση Υποστηρίζει την πλοήγηση με αναπαράσταση
σχεδίου πορείας με όρους οπτικών ενδιάμεσων σχεδίου πορείας με όρους οπτικών ενδιάμεσων μεταξύ αρχής και τέλους πορείαςμεταξύ αρχής και τέλους πορείας..
Η αναγνώριση Η αναγνώριση ““οπτικών οροσήμωνοπτικών οροσήμων”” διατρέχει διατρέχει όλες τις επιμέρους φάσειςόλες τις επιμέρους φάσεις..

6
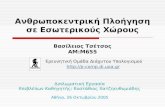
Η προσέγγισή μας
E d g e D e te c to rim a g e
H o u g hT ra n s fo rm e r
C o rn e rD e te c to r
e d g e s
e d g e s
V a n is h in gP o in t
C a lc u la to rlin e s
C o rn e rS e le c to r
b o rd e rs
c o rn e rs
P o in tC lu s te re r
p o in tss e t o f
c lu s te rs
L a n d m a rkD a ta b a s e
re fe re n c es e t(s ) o fc lu s te rs
M e tricC a lc u la to r
s im ila ritym e tric
Αναγνώριση οπτικών οροσήμων βασισμένων σε Αναγνώριση οπτικών οροσήμων βασισμένων σε αντικείμενα του χώρου που αναπαρίσταται ως αντικείμενα του χώρου που αναπαρίσταται ως
γράφοςγράφος Τα αντικείμενα οριοθετούνται από τις κορυφές τους Τα αντικείμενα οριοθετούνται από τις κορυφές τους
(γωνίες)(γωνίες)

7
Αναγνώριση κορυφών
Επιλογή αλγορίθμου για εξαγωγή Επιλογή αλγορίθμου για εξαγωγή κορυφώνκορυφών
Kanade-Lucas-Tomasi (KLT) vs. Kanade-Lucas-Tomasi (KLT) vs. SUSANSUSAN
Επιλογή κορυφών σε ωφέλιμα τμήματα Επιλογή κορυφών σε ωφέλιμα τμήματα της εικόνας της εικόνας

8
Σημείο διαφυγής
Αναγνώριση σημείου Αναγνώριση σημείου διαφυγής στον διαφυγής στον
«απέναντι» τοίχο«απέναντι» τοίχο
Αξιοποίηση της Αξιοποίηση της εξαγωγής ακμών εξαγωγής ακμών
για τον ορισμό των για τον ορισμό των επιφανειώνεπιφανειών

9
Ομαδοποίηση (clustering)
Προσομοίωση «βαρυτικών» δυνάμεωνΠροσομοίωση «βαρυτικών» δυνάμεων
Η σταθερά Η σταθερά ΚΚ ρυθμιστής του πλήθους ρυθμιστής του πλήθους των ομάδωντων ομάδων
22
21 ˆˆr
Kr
r
mmKrF

10
Μετρική σύγκρισης ομάδων Αναπαράσταση ομάδων ως διανύσματα με Αναπαράσταση ομάδων ως διανύσματα με
συντεταγμένες:συντεταγμένες: Πλήθος κορυφώνΠλήθος κορυφών Απόσταση Απόσταση Mahalanobis Mahalanobis του κέντρου βάρους από του κέντρου βάρους από
σημείο διαφυγήςσημείο διαφυγής Γωνία θέασης κέντρου βάρους από σημείο Γωνία θέασης κέντρου βάρους από σημείο
διαφυγήςδιαφυγής

11
Μετρική σύγκρισης ομάδων Σύγκριση με αποθηκευμένα ορόσημαΣύγκριση με αποθηκευμένα ορόσημα
222 )()()(
1
CjCiBjBiAjAiij xxxxxxkF
M
i
N
jijF
1 1

12
Πειραματικά αποτελέσματα

13
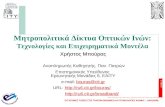
Πειραματικά αποτελέσματα
0 50 100 150 200 250
0
50
100
150
200
250
0 50 100 150 200 250
0
50
100
150
200
250
0 50 100 150 200 250
0
50
100
150
200
250

14
Πειραματικά αποτελέσματα

15
Συμπεράσματα Μέθοδος για την ποιοτική αναγνώριση Μέθοδος για την ποιοτική αναγνώριση
οπτικών οροσήμων οπτικών οροσήμων Περιορισμός κλειστών χώρων (σημείο Περιορισμός κλειστών χώρων (σημείο
διαφυγής)διαφυγής) Υψηλού επιπέδου πλοήγηση Υψηλού επιπέδου πλοήγηση vs. vs.
χαμηλού επιπέδου (π.χ. αποφυγή χαμηλού επιπέδου (π.χ. αποφυγή εμποδίων) εμποδίων)

16
Ορισμός & Ανίχνευση Οπτικών Οροσήμων
Κωνσταντίνος ΧανδρινόςΚωνσταντίνος Χανδρινός
IIT – NCSR “Demokritos”IIT – NCSR “Demokritos”
Athens, GreeceAthens, Greece
More info: More info: [email protected]@iit.demokritos.gr
http://www.iit.demokritos.gr/skel/http://www.iit.demokritos.gr/skel/ΥΓΕΙΟΡΟΜΠΟΤ - ΠΕΝΕΔ 99ΥΓΕΙΟΡΟΜΠΟΤ - ΠΕΝΕΔ 99
ΕΜΠ – ΕΚΕΦΕ «Δ» - ΠΑΠΕΙΕΜΠ – ΕΚΕΦΕ «Δ» - ΠΑΠΕΙ