Licenciatura em Engenharia...
12
Licenciatura em Engenharia Civil MECÂNICA I 2ª Chamada – 08/07/2002 NOME: __________________________________________________________________________ 1) (3 VAL.) a) Verifique se o sistema articulado plano ilustrado na figura é globalmente isostático. Justifique. O sistema ilustrado na figura é internamente hipo- estático, uma vez que o número de barras, b = 8, é inferior a 2n-3 = 9 (em que o nº de nós é n = 6). Ou seja, a condição necessária de rigidez, b = 2n-3, não é verificada, logo o sistema não é globalmente isostático. ____________________________________ b) O que entende por conceito de deslocamento virtual, usado no Princípio dos Trabalhos Virtuais. No âmbito do Princípio dos Trabalhos Virtuais, deslocamento virtual é um deslocamento infinitesimal do sistema em estudo, compatível com as ligações ao exterior. ________________________________________________________________________________ ________________________________________________________________________________ c) Num cabo submetido a uma carga distribuída vertical, mostre que a componente horizontal da força de tracção no cabo é igual em todos os pontos. Considerando que o ponto O se encontra na posição mais baixa do cabo e estudando o equilíbrio entre o ponto O e o ponto arbitrário C, verifica-se que: T cx = T c ·cos θ = T o T cy = T c ·sen θ = P Ou seja, a componente horizontal, T cx , é sempre igual a T o em todos os pontos. _________________________ d) O bloco assente sobre a superfície, inclinada de um ângulo θ em relação à horizontal, encontra-se numa situação de movimento iminente. Determine o coeficiente de atrito estático em função do ângulo θ. A reacção, R, decompõe-se nas componentes normal, N = P·cosθ, e tangencial (devida ao atrito), F e = P·senθ. Em situação de movimento iminente, a componente F e é definida por: F e = f e ·N, em que f e é o coeficiente de atrito estático. Assim: f e = F e /N = (P·senθ)/( P·cosθ) = tg θ. Ou seja, f e = tg θ. _________________ θ P R F =Psenθ e N=Pcosθ
Transcript of Licenciatura em Engenharia...
Licenciatura em Engenharia Civil MECÂNICA I
2ª Chamada – 08/07/2002
NOME: ___________________________________________________________________________
1) (3 VAL.)
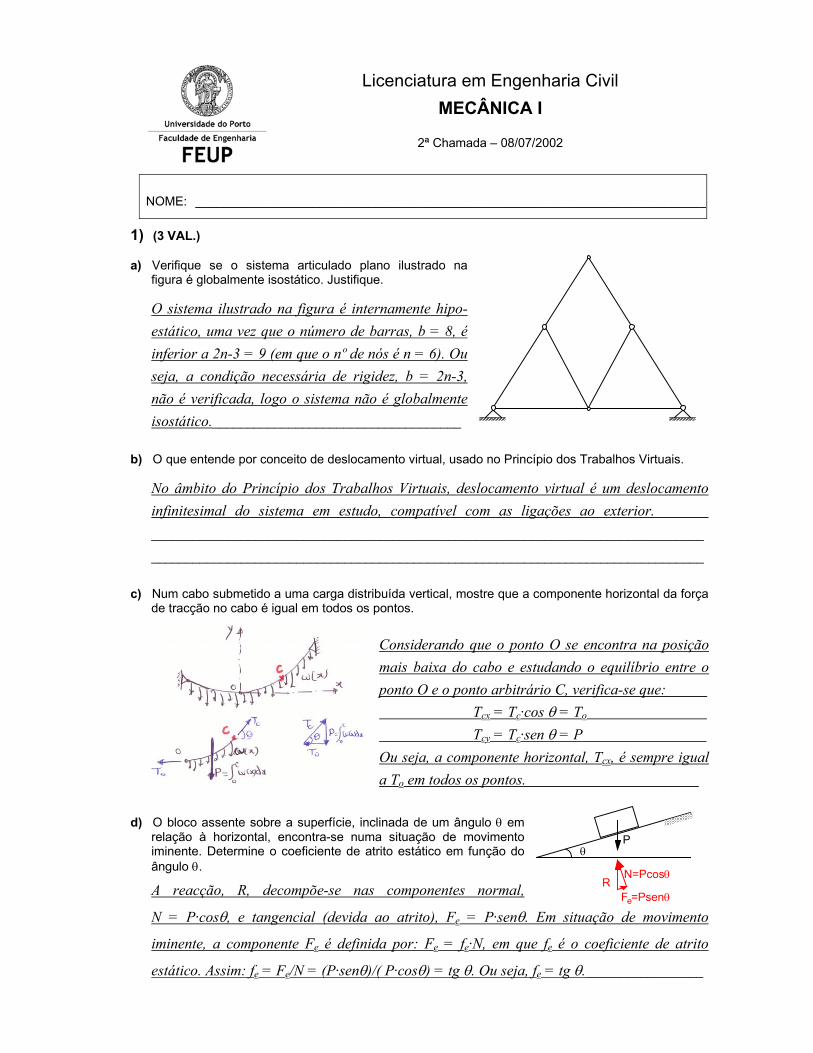
a) Verifique se o sistema articulado plano ilustrado na figura é globalmente isostático. Justifique.
O sistema ilustrado na figura é internamente hipo-estático, uma vez que o número de barras, b = 8, é inferior a 2n-3 = 9 (em que o nº de nós é n = 6). Ou seja, a condição necessária de rigidez, b = 2n-3, não é verificada, logo o sistema não é globalmente isostático.____________________________________
b) O que entende por conceito de deslocamento virtual, usado no Princípio dos Trabalhos Virtuais.
No âmbito do Princípio dos Trabalhos Virtuais, deslocamento virtual é um deslocamento infinitesimal do sistema em estudo, compatível com as ligações ao exterior. ________________________________________________________________________________
________________________________________________________________________________
c) Num cabo submetido a uma carga distribuída vertical, mostre que a componente horizontal da força de tracção no cabo é igual em todos os pontos.
Considerando que o ponto O se encontra na posição mais baixa do cabo e estudando o equilíbrio entre o ponto O e o ponto arbitrário C, verifica-se que: Tcx = Tc·cos θ = To Tcy = Tc·sen θ = P Ou seja, a componente horizontal, Tcx, é sempre igual a To em todos os pontos._________________________
d) O bloco assente sobre a superfície, inclinada de um ângulo θ em relação à horizontal, encontra-se numa situação de movimento iminente. Determine o coeficiente de atrito estático em função do ângulo θ.
A reacção, R, decompõe-se nas componentes normal,
N = P·cosθ, e tangencial (devida ao atrito), Fe = P·senθ. Em situação de movimento
iminente, a componente Fe é definida por: Fe = fe·N, em que fe é o coeficiente de atrito
estático. Assim: fe = Fe/N = (P·senθ)/( P·cosθ) = tg θ. Ou seja, fe = tg θ._________________
θP
RF =Psenθe
N=Pcosθ


Sandra Nunes Julho 2002 1/3
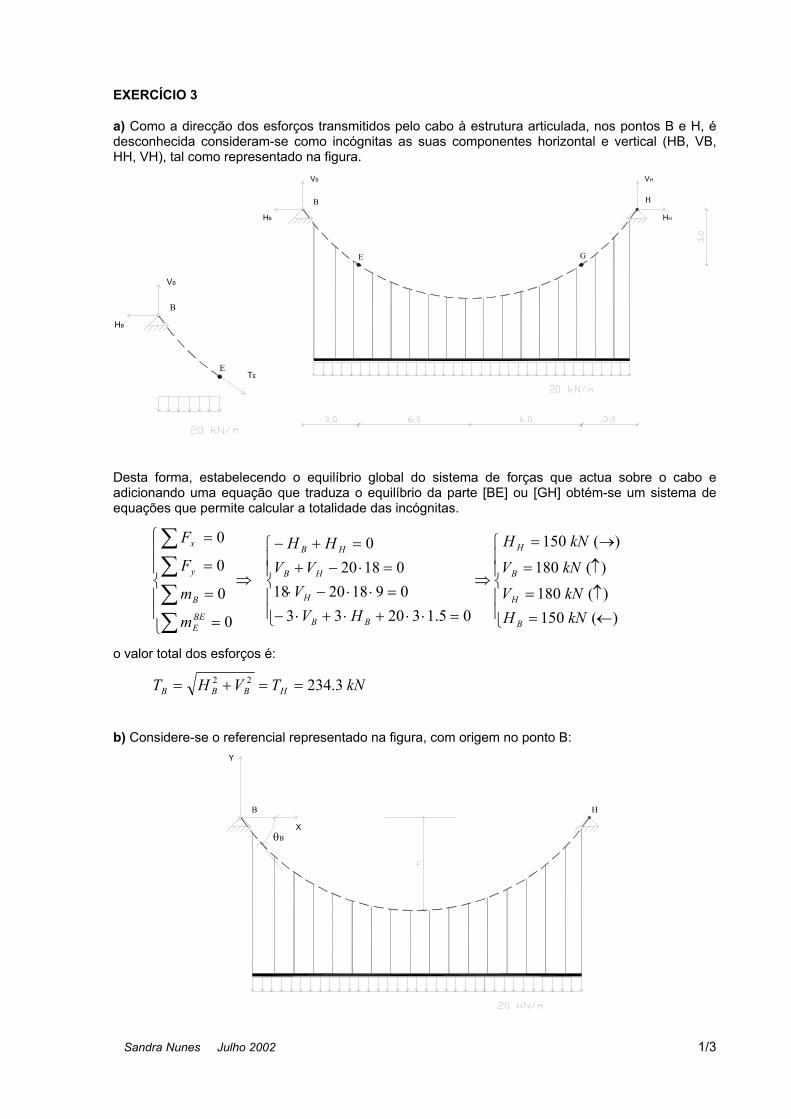
EXERCÍCIO 3
a) Como a direcção dos esforços transmitidos pelo cabo à estrutura articulada, nos pontos B e H, é desconhecida consideram-se como incógnitas as suas componentes horizontal e vertical (HB, VB, HH, VH), tal como representado na figura.
E
HB
VB
B
TE
B
E
H
VB
HB
VH
HH
G
Desta forma, estabelecendo o equilíbrio global do sistema de forças que actua sobre o cabo e adicionando uma equação que traduza o equilíbrio da parte [BE] ou [GH] obtém-se um sistema de equações que permite calcular a totalidade das incógnitas.
←=↑=
↑=
→=
⇒
=⋅⋅+⋅+⋅−=⋅⋅−⋅=⋅−+
=+−
⇒
=
=
=
=
∑∑∑∑
)(150)(180)(180
)(150
05.13203309182018
018200
0
0
0
0
kNHkNV
kNV
kNH
HVVVVHH
m
m
F
F
B
H
B
H
BB
H
HB
HB
BEE
B
y
x
o valor total dos esforços é:
kNTVHT HBBB 3.23422 ==+=
b) Considere-se o referencial representado na figura, com origem no ponto B: Y
B H
XθΒ

Sandra Nunes Julho 2002 2/3
i) sendo º19.50150180
−=−=−= arctgHVarctgB
BBθ
1500 === HB HHT
xdxdxxwWx x
2020)(0 0
=== ∫ ∫
a equação do cabo pode ser obtida a partir da seguinte equação:
xxdxxxyxtgTW
dxdy x
B ⋅−=−⋅
=⇒−⋅
=+= ∫ 2.115
)2.1152()(
150180
15020 2
00
θ
ii) A flecha é a distância medida na vertical entre os apoios e o ponto mais baixo do cabo que ocorre quando:
mxxdxdy 90
150180
150200 =⇒=−
⋅⇒=
4.5)9( −=== xyflecha
iii) O esforço é máximo nos pontos de inclinação máxima, ou seja, B e H , e vale:
kNTTT HBmáx 3.234===
o esforço no cabo é mínimo no ponto de cota mais baixa, de coordenadas (9.0,-5.4) (m), e vale:
kNTT 1500min ==
b) A estrutura articulada representada na figura constitui uma viga Gerber (o corpo I [ABCDEF] apoia-se no corpo II [FGHIJK]).
A
D
C E
B F
KG
J
I
H
180 kN
150 kN
180 kN
150 kN
VK
HK
HJ
VD
Sandra Nunes Julho 2002 3/3
O equilíbrio do sistema de forças fica assegurado se forem satisfeitas as seguintes equações:
←=↑=
↑=
→−=
⇒
=⋅+⋅−=⋅−⋅+⋅+⋅−
=−−+=+−−−
⇒
=
=
=
=
∑∑∑∑
+
+
+
)(180)(180)(180
)(180
0918090331801818018
01801800150150
0
0
0
0
kNHkNVkNV
kNH
VHV
VVHH
m
m
F
F
J
D
K
K
D
JD
KD
KJ
IF
IIIK
IIIy
IIIx
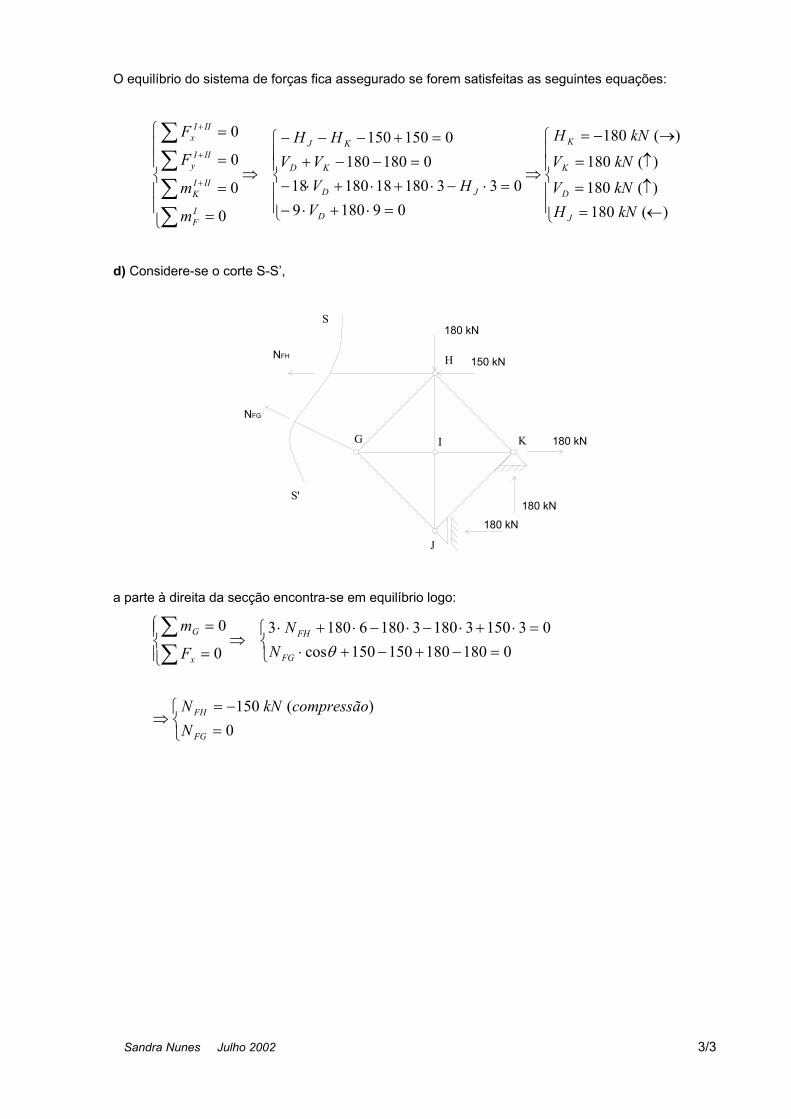
d) Considere-se o corte S-S’,
G
180 kN
180 kN
I
J
K 180 kN
150 kN
180 kN
H
S
S'
NFH
NFG
a parte à direita da secção encontra-se em equilíbrio logo:
=−=
⇒
=−+−+⋅=⋅+⋅−⋅−⋅+⋅
⇒
=
=
∑∑
0)(150
0180180150150cos031503180318061803
0
0
FG
FH
FG
FH
x
G
NcompressãokNN
NN
F
mθ
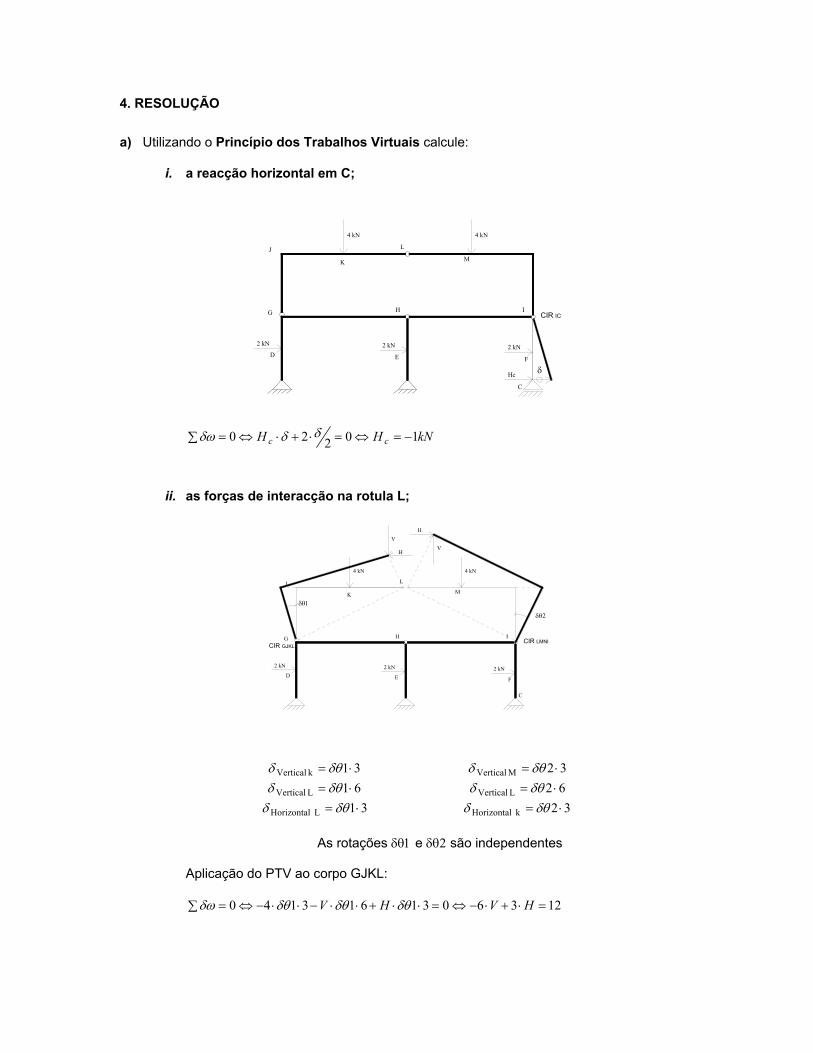
4. RESOLUÇÃO
a) Utilizando o Princípio dos Trabalhos Virtuais calcule:
i. a reacção horizontal em C;
δ
CIR IC
K
4 kN
J
G
D
2 kN 2 kN
E
H
L
4 kN
M
I
F
2 kN
C
Hc
kNHH cc 10220 −=⇔=⋅+⋅⇔=∑ δδδω
ii. as forças de interacção na rotula L;
K
4 kN
J
G
D
2 kN 2 kN
E
H
L
4 kN
M
I
F
2 kN
C
CIR GJKLCIR LMNI
δθ1
δθ2
VH
HV
31k Vertical ⋅= δθδ 32M Vertical ⋅= δθδ 61L Vertical ⋅= δθδ 62L Vertical ⋅= δθδ
31L Horizontal ⋅= δθδ 32k Horizontal ⋅= δθδ
As rotações δθ1 e δθ2 são independentes
Aplicação do PTV ao corpo GJKL:
1236031613140 =⋅+⋅−⇔=⋅⋅+⋅⋅−⋅⋅−⇔=∑ HVHV δθδθδθδω
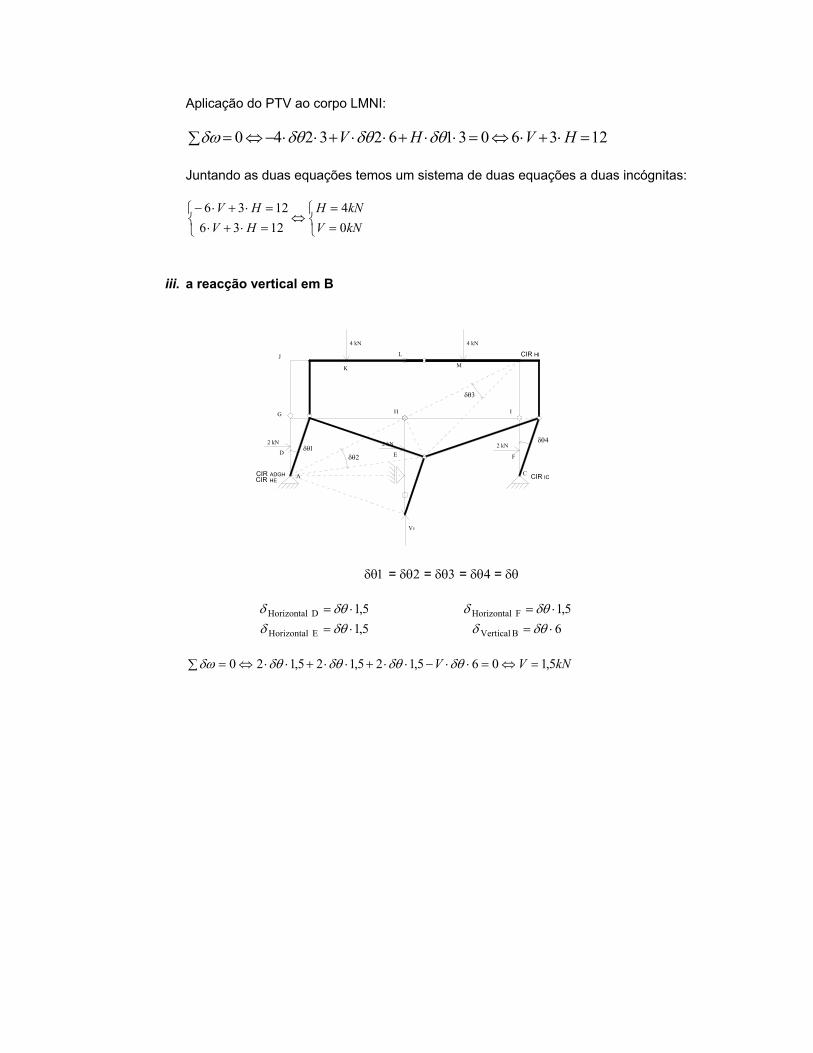
Aplicação do PTV ao corpo LMNI:
1236031623240 =⋅+⋅⇔=⋅⋅+⋅⋅+⋅⋅−⇔=∑ HVHV δθδθδθδω Juntando as duas equações temos um sistema de duas equações a duas incógnitas:
==
⇔
=⋅+⋅=⋅+⋅−
kNVkNH
HVHV
04
12361236
iii. a reacção vertical em B
K
4 kN
J
G
D
2 kN 2 kN
E
H
L
4 kN
M
I
F
2 kN
CCIR ADGH CIR IC
CIR HI
AHECIR
δθ1δθ2
δθ3
δθ4
VE
δθ1 = δθ2 = δθ3 = δθ4 = δθ
5,1D Horizontal ⋅= δθδ 5,1F Horizontal ⋅= δθδ 5,1E Horizontal ⋅= δθδ 6B Vertical ⋅= δθδ
kNVV 5,1065,125,125,120 =⇔=⋅⋅−⋅⋅+⋅⋅+⋅⋅⇔=∑ δθδθδθδθδω
Licenciatura em Engenharia Civil MECÂNICA I
2ª chamada – 08/07/2002
NOME: ___________________________________________________________________________
Não esqueça de escrever o
nome Assinale nas quadrículas verdadeiro V ou falso F .
Nota: Poderão existir nenhuma ou mais do que uma resposta verdadeiras.
COTAÇÕES: i. As respostas têm todas a mesma cotação.
ii. As respostas erradas descontam um terço das respectivas cotações.
iii. As respostas com quadrículas em branco não descontam.
a) F Para que dois sistemas de vectores sejam equivalentes, é condição necessária e suficiente
que tenham os mesmos momentos em três pontos quaisquer. V Num sistema plano de vectores concorrentes num ponto, o momento desse torsor num
ponto qualquer fora do plano pode ser não nulo. F Num sistema de vectores com suportes paralelos, o equilíbrio é garantido desde que o
vector principal seja nulo.
b) V O método do polígono funicular pode ser usado para determinar o centro de um sistema de
vectores paralelos e ainda para determinar o centróide de um sistema de vectores quaisquer.
V Num sistema de forças redutíveis a binário, o polígono funicular correspondente é aberto. F Num sistema de forças em equilíbrio estático, o polígono funicular pode ser fechado ou
aberto.
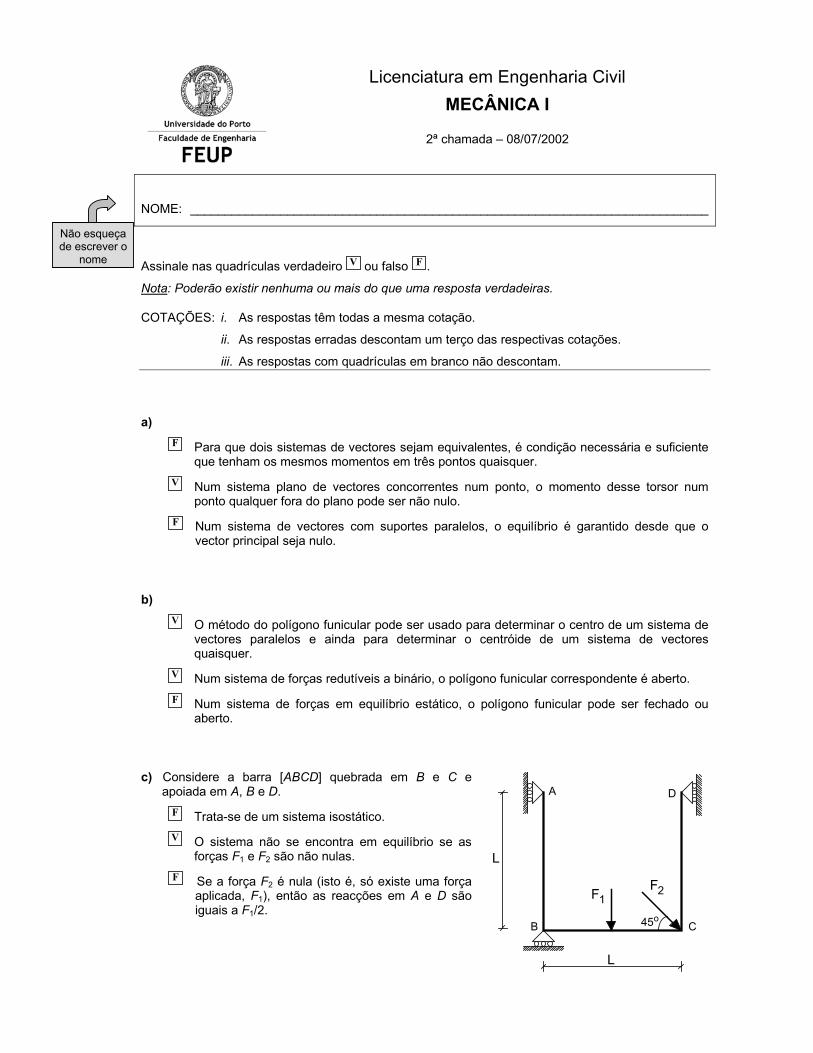
c) Considere a barra [ABCD] quebrada em B e C e apoiada em A, B e D. F Trata-se de um sistema isostático. V O sistema não se encontra em equilíbrio se as
forças F1 e F2 são não nulas. F Se a força F2 é nula (isto é, só existe uma força
aplicada, F1), então as reacções em A e D são iguais a F1/2.
A
B C
D
F1F2
45o
L
L
d) F As reacções que ocorrem nos apoios dos sistemas materiais caracterizam-se por serem
forças interiores. V Um sistema material tridimensional diz-se em equilíbrio estável quando os seus apoios
estão colocados de forma a impedirem os seis graus de liberdade independentes. F No espaço tridimensional, um apoio com cinco graus de liberdade caracteriza-se por ter
uma reacção com cinco componentes independentes.
e) F Na análise de cabos, considera-se que eles são elementos perfeitamente flexíveis, ou seja,
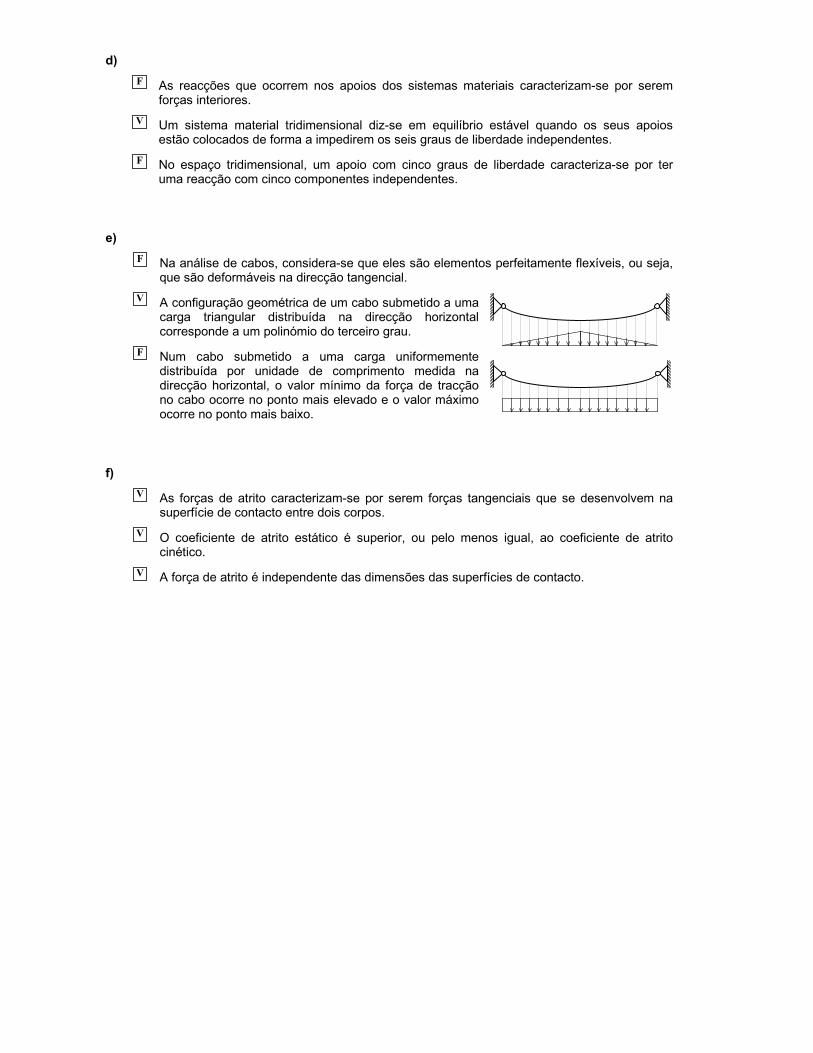
que são deformáveis na direcção tangencial. V A configuração geométrica de um cabo submetido a uma
carga triangular distribuída na direcção horizontal corresponde a um polinómio do terceiro grau.
F Num cabo submetido a uma carga uniformemente distribuída por unidade de comprimento medida na direcção horizontal, o valor mínimo da força de tracção no cabo ocorre no ponto mais elevado e o valor máximo ocorre no ponto mais baixo.
f) V As forças de atrito caracterizam-se por serem forças tangenciais que se desenvolvem na
superfície de contacto entre dois corpos. V O coeficiente de atrito estático é superior, ou pelo menos igual, ao coeficiente de atrito
cinético. V A força de atrito é independente das dimensões das superfícies de contacto.