Interface dynamics for incompressible flows in...
81
Interface dynamics for incompressible flows in 2D Diego Córdoba Interface dynamics for incompressible flows in 2D
Transcript of Interface dynamics for incompressible flows in...

Interface dynamics for incompressible flowsin 2D
Diego Córdoba
Interface dynamics for incompressible flows in 2D

Equation
ρt + u · ∇ρ = 0,∇ · u = 0,
ρ(x1, x2, t) =
ρ1, x ∈ Ω1(t)ρ2, x ∈ Ω2(t),
with ρ(x , t) an active scalar, (x , t) ∈ R2 × R+, ρ1 6= ρ2 areconstants, and Ω2(t) = R2 r Ω1(t).
1 SQG sharp front: ρ temperature,
u = (−R2ρ,R1ρ), Rj = iξj/|ξ|.
2 Muskat: ρ density, µ viscosity
µ
κu = −∇p − (0, gρ), Darcy’s law.
3 Water wave: ρ density,
ρ(ut + (u · ∇)u) = −∇p − (0, gρ), Euler.
Interface dynamics for incompressible flows in 2D

The SQG equation
Equation
θt + u · ∇θ = 0,
u = ∇⊥ψ, θ = −(−∆)1/2ψ,
with θ(x , t) the temperature, (x , t) ∈ R2 × R+.
Constantin, Majda, and Tabak (1994)
Interface dynamics for incompressible flows in 2D

Sharp fronts
We consider weak solutions given by
θ(x1, x2, t) =
θ1, Ω(t)θ2, R2 r Ω(t).
Interface dynamics for incompressible flows in 2D

The 2-D vortex patch problem
Contour equation
wt + u · ∇w = 0,
u = ∇⊥ψ, w = ∆ψ,
where the vorticity is given by
w(x1, x2, t) =
w0, Ω(t)0, R2 r Ω(t).
Chemin (1993)Bertozzi and Constantin (1993)
Interface dynamics for incompressible flows in 2D

The 2-D patch problem for SQG
Rodrigo (2005), for a periodic C∞ front, i.e.
θ(x1, x2, t) =
θ1, f (x1, t) > x2θ2, f (x1, t) ≤ x2.
Interface dynamics for incompressible flows in 2D

The α-patch model
Córdoba, Fontelos, Mancho and Rodrigo (2005)
Contour equation
θt + u · ∇θ = 0,
u = ∇⊥ψ, θ = −(−∆)1−α/2ψ, 0 < α ≤ 1,
where the active scalar θ(x , t) satisfies
θ(x1, x2, t) =
θ1, Ω(t)θ2, R2 r Ω(t).
Interface dynamics for incompressible flows in 2D

The contour equation
∂Ω(t) = x(γ, t) = (x1(γ, t), x2(γ, t)) : γ ∈ [−π, π] = T,
where x(γ, t) is one to one. We have
∇⊥θ = (θ1 − θ2) ∂γx(γ, t) δ(x − x(γ, t)),
u = −(−∆)α/2−1∇⊥θ,
and it gives
u(x , t) = − Θα
2π
∫T
∂γx(γ − η, t)|x − x(γ − η, t)|α
dη.
Interface dynamics for incompressible flows in 2D

The normal velocity of the systems reads
u(x(γ, t), t) · ∂⊥γ x(γ, t) = − Θα
2π
∫T
∂γx(γ − η, t) · ∂⊥γ x(γ, t)|x(γ, t)− x(γ − η, t)|α
dη.
The tangential velocity does not change the shape of theboundary, so that we fix the contour α-patch equations asfollows:
Contour equation
xt (γ, t) =Θα
2π
∫T
∂γx(γ, t)− ∂γx(γ − η, t)|x(γ, t)− x(γ − η, t)|α
dη, 0 < α ≤ 1,
x(γ,0) = x0(γ).
Interface dynamics for incompressible flows in 2D

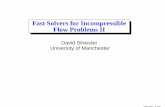
Numerical simulations
Close caption of the corner region at t=16.515 for α = 0.5 (a)and t= 4.464 for α = 1 (b). Observe that the singularity ispoint-like in both cases.
Interface dynamics for incompressible flows in 2D

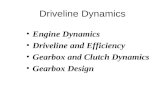
Numerical simulations
Evidence of finite time singularity. (a) Evolution of the inverse ofthe maximum curvature with time. (b) Evolution of the minimumdistance between patches with time. (Insets) Here, werepresent the latest stage of the evolution together with itslinear interpolation.
Interface dynamics for incompressible flows in 2D

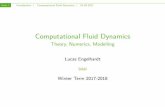
Numerical simulations
Rescaled profiles at 20 different times in the interval (3.46,4.46)for the case α = 1.
Interface dynamics for incompressible flows in 2D

Local well-posedness in Hs for 0 < α ≤ 1
We define
F (x)(γ, η, t) =|η|
|x(γ, t)− x(γ − η, t)|∀ γ, η ∈ [−π, π],
withF (x)(γ,0, t) = |∂γx(γ, t)|−1.
Gancedo (2008)
Theorem
Let x0(γ) ∈ Hk (T) for k ≥ 3 with F (x0)(γ, η) <∞. Then thereexists a time T > 0 so that there is a unique solution to theα-patch model for 0 < α ≤ 1 in C1([0,T ]; Hk (T)), withx(γ,0) = x0(γ).
Interface dynamics for incompressible flows in 2D

Existence for α = 1; the SQG sharp front
We modify the equation as follows:
Contour equation
xt (γ, t) =
∫T
∂γx(γ, t)− ∂γx(γ − η, t)|x(γ, t)− x(γ − η, t)|
dη + λ(γ, t)∂γx(γ, t), (1)
with
λ(γ, t) =γ+π
2π
∫T
∂γx(γ, t)|∂γx(γ, t)|2
·∂γ(∫
T
∂γx(γ, t)−∂γx(γ−η, t)|x(γ, t)−x(γ−η, t)|
dη)dγ
−∫ γ
−π
∂γx(η, t)|∂γx(η, t)|2
·∂η(∫
T
∂γx(η, t)−∂γx(η−ξ, t)|x(η, t)−x(η−ξ, t)|
dξ)dη.
(2)
Interface dynamics for incompressible flows in 2D

We get|∂γx(γ, t)|2 = A(t).
Hou, Lowengrub and Shelley (1997)
Extra cancellations:
∂γx(γ, t) · ∂2γx(γ, t) = 0,
and∂γx(γ, t) · ∂3
γx(γ, t) = −|∂2γx(γ, t)|2.
Interface dynamics for incompressible flows in 2D

Darcy’s law
Lawµ
κv = −∇p − (0,0, g ρ),
v velocity, p pressure, µ viscosity, κ permeability, ρ density, andg acceleration due to gravity.
Muskat (1937)Saffman and Taylor (1958)
Equation (Hele–Shaw)
12µb2 v = −∇p − (0, g ρ),
b distance between the plates.
Interface dynamics for incompressible flows in 2D

Smooth initial data with µ = const .
Equation
ρt + v · ∇ρ = 0v = −∇p − (0, ρ)div v = 0
Two-dimensional mass balanceequation in porous media (2DPM)
v(x) =1
2πPV
∫R2
(−2y1y2
|y |4,y2
1 − y22
|y |4) ρ(x − y)dy − 1
2(0, ρ(x)) ,
(∂t + v · ∇)∇⊥ρ = (∇v)∇⊥ρ.
Interface dynamics for incompressible flows in 2D

Local existence.Singularities with infinite energy, with a stream functiongiven by
ψ(x1, x2, t) = x2f (x1, t) + g(x1, t).
Blow-up ⇔∫ T
0‖∇ρ‖BMO(t) dt =∞.
Geometric constraints: η =∇⊥ρ|∇⊥ρ|
.
Numerical simulations: ‖∇ρ‖L∞(t) ∼ et .
Interface dynamics for incompressible flows in 2D

Cordoba-Gancedo (2007)
We consider the case where the fluid has different densities,that is ρ is represented by
ρ(x1, x2, t) =
ρ1, x2 > f (x1, t)ρ2, x2 < f (x1, t)
being f the interface. Then we have
Equation
dfdt
(x , t) =ρ2 − ρ1
2πPV
∫R
(∂x f (x , t)− ∂x f (x − α, t))α
α2 + (f (x , t)− f (x − α, t))2 dα
f (x ,0) = f0(x); x ∈ R.
ρt + v · ∇ρ = 0v = −∇p − (0, ρ)div v = 0
⇔ 2DPM contour equation
Interface dynamics for incompressible flows in 2D

The linearized equation
If we neglect the terms of order greater than one
ft =ρ1 − ρ2
2(H∂x f ) =
ρ1 − ρ2
2Λf ,
f (x ,0) = f0(x).
Applying the Fourier transform we get
f (ξ) = f0(ξ)eρ1−ρ2
2 |ξ|t .
Problemρ1 < ρ2 stable case,ρ1 > ρ2 unstable case.
Interface dynamics for incompressible flows in 2D

Local well-posedness for the stable case (ρ2 > ρ1)
The following theorem follows
Theorem
Let f0(x) ∈ Hk for k ≥ 3 and ρ2 > ρ1. Then there exists a timeT > 0 so that there is a unique solution to 2DPM contourequation in C1([0,T ]; Hk ) with f (x ,0) = f0(x).
Interface dynamics for incompressible flows in 2D

Global existence?
L∞ decays.∫f (x , t) dx =
∫f0(x) dx .
Global existence for small initial data:∑|ξ||f (ξ)| << 1.
Interface dynamics for incompressible flows in 2D

Ill-posedness for the unstable case (ρ1 > ρ2)
We define‖g‖b =
∑|g(ξ)|eb|ξ| b ≥ 0.
If ‖g‖b <∞, g is analytic in |=z| < b.
We get global solutions for the 2-D stable case f (x , t), x ∈ R,with
‖∂x f‖a(t) ≤ C(ε) exp((2σa− |ρ2 − ρ1|t)/4),
‖Λ1+γ f0‖0 < C,
and‖Λ1+γ+ζ f0‖0 =∞,
for γ, ζ > 0.
Interface dynamics for incompressible flows in 2D

We takefλ(x1, t) = λ−1f (λx1,−λt + λ1/2),
fλλ>0 a family of solutions to the unstable case. Then
‖fλ‖Hs (0) = |λ|s−32 ‖f‖Hs (λ
12 ) ≤ C|λ|s−
32 ‖f‖1(λ
12 ) ≤ C|λ|s−
32 e−λ
1/2,
and
‖fλ‖Hs (λ−1/2) = |λ|s−32 ‖f‖Hs (0) ≥ |λ|s−
32 C‖Λ1+γ+ζ f0‖0 =∞,
for s > 3/2 and γ, ζ small enough.
TheoremLet s > 3/2, then for any ε > 0 there exists a solution f of2DPM contour equation with ρ1 > ρ2 and 0 < δ < ε such that‖f‖Hs (0) ≤ ε and ‖f‖Hs (δ) =∞.
Interface dynamics for incompressible flows in 2D

The Muskat problem
Equation
ρt + u · ∇ρ = 0,∇ · u = 0,µ
κu = −∇p − (0, gρ),
(µ, ρ)(x , t) =
(µ1, ρ1), x ∈ Ω1(t)(µ2, ρ2), x ∈ Ω2(t),
Siegel, Caflish & Howison (2004)Ambrose (2004)
Interface dynamics for incompressible flows in 2D

We shall consider z(α + 2πk , t) = z(α, t) + (2πk ,0).Darcy’s law yields
ω(x , t) = $(α, t)δ(x − z(α, t)),
Biot-Savart
u(x , t) =1
2πPV
∫(x − z(β, t)⊥
|x − z(β, t)|2$(β, t)dβ,
and taking limits
uj(z(α, t), t) = BR(z, $)(α, t)∓ $(α, t)2|∂αz(α, t)|2
∂αz(α, t) j = 1,2,
where
BR(z, $)(α, t) =1
2πPV
∫(z(α, t)− z(β, t)⊥
|z(α, t)− z(β, t)|2$(β, t)dβ.
Interface dynamics for incompressible flows in 2D

Closing the equation: In search of a relationship between z and$ Beginning with Darcy’s law:
µj
κuj = −∇pj − (0, g ρj)
First we substitute uj by its formula involving Birkhoff-Rott.Next, for each j, we write its scalar product with ∂αz(α), andfinally we subtract both expressions to get
µ2 + µ1
2κ$(α, t) +
µ2 − µ1
κBR(z, $)(α, t) · ∂αz(α, t)
= −(∇p2(z(α, t), t)−∇p1(z1(α, t), t))·∂αz(α, t)−g(ρ2−ρ1) ∂αz2(α, t)
= −∂α(p2(z(α, t), t)− p1(z(α, t), t))− g(ρ2 − ρ1) ∂αz2(α, t)
Since
∂α(p2(z(α, t), t)− p1(z(α, t), t)) = 0
Interface dynamics for incompressible flows in 2D

Darcy’s law implies
∆p(x , t) = −div (µ(x , t)κ
u(x , t))− g ∂x2ρ(x , t),
therefore∆p(x , t) = Π(α, t)δ(x − z(α, t)),
where Π(α, t) is given by
Π(α, t) = (µ2 − µ1
κu(z(α, t), t) ·∂⊥α z(α, t) + g(ρ2−ρ1)∂αz1(α, t)).
It follows that:
p(x , t) = − 12π
∫T
ln(
cosh(x2−z2(α, t))−cos(x1−z1(α, t)))Π(α, t)dα,
for x 6= z(α, t), implying the important identity
p2(z(α, t), t) = p1(z(α, t), t), (3)
which is just a mathematical consequence of Darcy’s law,making unnecessary to impose it as a physical assumption.
Interface dynamics for incompressible flows in 2D

Then
$(α, t) + AµT ($)(α, t) = −2gκC(ρ, µ)∂αz2(α, t)
where
T ($) = 2BR(z, $) · ∂αz, Aµ =µ2 − µ1
µ2 + µ1 , C(ρ, µ) =ρ2 − ρ1
µ2 + µ1 .
Baker, Meiron & Orszag (1982) |λ| < 1 for (I + AµT ).
Contour equation
zt (α, t) = BR(z, $)(α, t) + c(α, t)∂αz(α, t),$(α, t) = (I + AµT )−1(−2gκC(ρ, µ)∂αz2)(α, t).
Interface dynamics for incompressible flows in 2D

Cordoba, Cordoba & Gancedo (2008).
Theorem
Let z0(γ) ∈ Hk (T) for k ≥ 3, F (z0)(α, β) <∞ and
σ0(α) = −(∇p2(z0(α),0)−∇p1(z0(α),0)) · ∂⊥α z0(α) > 0.
Then there exists a time T > 0 so that there is a solution to thecontour equation in C1([0,T ]; Hk (T)) with z(α,0) = z0(α).
where
σ(α) = −(∇p2(z(α))−∇p1(z(α))) · ∂⊥α z(α)
= µ2−µ1
κ BR(z, $)(α) · ∂⊥α z(α) + g(ρ2 − ρ1)∂αz1(α).
Interface dynamics for incompressible flows in 2D

Energy estimates:
|||z|||2 = ‖z‖2H3 + ‖F (z)‖2L∞ , ‖(I + AµT )−1‖H
12→H
12≤ eC|||z|||2 ,
We can estimate as follows:
‖$‖H2 ≤ eC|||z|||2 .
Interface dynamics for incompressible flows in 2D

By energy estimates we obtain
ddt|||z|||2(t) ≤ −K
∫Tσ(α, t)∂3
αz(α, t) · Λ(∂3αz)(α, t)dα + eC(|||z|||2).
Pointwise inequality:
f Λ(f ) ≥ 12
Λ(f 2).
−∫
Tσ∂3
αz·Λ(∂3αz)dα ≤ −1
2
∫TσΛ(|∂3
αz|2)dα = −12
∫T
Λ(σ)|∂3αz|2dα
as long asσ(α, t) > 0.
Interface dynamics for incompressible flows in 2D

Sketch of the proof
Estimates on the arc-chord condition
Lemmad
dt‖F(z)‖2
L∞(t) ≤ expC(‖F(z)‖2L∞(t) + ‖z‖2
H3(t))
17

Sketch of the proof
Estimate for the evolution of the minimum of the difference of the gradientsof the pressure in the normal direction. This quantity is given by
σ(α) =µ2 − µ1
kBR(z,$)(α) · ∂⊥α z(α) + g(ρ2 − ρ1)∂αz1(α).
Lemma Let z(α) be a solution of the system with z(α, t) ∈ C1([0, T ];H3),and
m(t) = mınα∈T
σ(α, t).
Then
m(t) ≥ m(0)−∫ t
0
expC(‖F(z)‖2L∞(s) + ‖z‖2
H3(s))ds.
18

Sketch of the proof
Regularizing the system
Let zε(α, t) be a solution of the following system:
zε,δt (α, t) = BRδ(zε,δ, $ε,δ)(α, t) + cε,δ(α, t)∂αzε,δ(α, t),
zε,δ(α, 0) = z0(α),
where
BRδ(z,$)(α, t) =(− 1
4π
∫T$(β, t)
tanh(z2(α,t)−z2(β,t)2 )(1 + tan2(z1(α,t)−z1(β,t)2 ))
tan2(z1(α,t)−z1(β,t)2 ) + tanh2(z2(α,t)−z2(β,t)2 ) + δdβ,
1
4π
∫T$(β, t)
tan(z1(α,t)−z1(β,t)2 )(1− tanh2(z2(α,t)−z2(β,t)2 ))
tan2(z1(α,t)−z1(β,t)2 ) + tanh2(z2(α,t)−z2(β,t)2 ) + δdβ
),
19

$ε,δ(α, t) = −µ2 − µ1
µ2 + µ1φε ∗ φε ∗ (2BR(zε,δ, $ε,δ) · ∂αzε,δ)(α)
−2kgρ2 − ρ1
µ2 + µ1φε ∗ φε ∗ (∂αz
ε,δ2 )(α),
cε,δ(α, t) =α + π
2π
∫T
∂αzε,δ(α, t)
|∂αzε,δ(α, t)|2· ∂αBRδ(zε,δ, $ε,δ)(α, t)dα
−∫ α
−π
∂αzε,δ(β, t)
|∂αzε,δ(α, t)|2· ∂βBRδ(zε,δ, $ε,δ)(β, t)dβ,
φ ∈ C∞c (R), φ(α) ≥ 0, φ(−α) = φ(α),
∫Rφ(α)dα = 1, φε(α) = φ(α/ε)/ε,
for ε > 0 and δ > 0.
20

Sketch of the proof
The next step is to integrate the system during a time T with T independentof ε. If z0(α) ∈ Hn, we have the solution zε ∈ C1([0, T ε];Hn) and that
mε(t) ≥ m(0)−∫ t
0
expC(‖F(zε)‖2L∞(s) + ‖zε‖2
H3(s))ds,
formε(t) = mın
α∈Tσε(α, t),
and t ≤ T ε.If initially σ(α, 0) > 0, there is a time depending on ε, denoted by T ε again,
in which σε(α, t) > 0.
21

Sketch of the proof
For t ≤ T ε
d
dt‖zε‖2
Hn(t) ≤ I + expC(‖F(zε)‖2L∞(t) + ‖zε‖2
Hn(t)),
for
I = − k
2π(µ1+µ2)
∫T
σε(α, t)
|∂αzε(α, t)|2φε ∗ (∂nαz
ε)(α, t) · Λ(φε ∗ (∂nαzε))(α, t)dα
≤ − k
2π(µ1+µ2)Aε(t)
∫Tσε(α, t)
1
2Λ(|φε ∗ (∂nαz
ε)|2)(α, t)dα.
= − k
2π(µ1+µ2)Aε(t)
∫T
Λ(σε)(α, t)1
2|φε ∗ (∂nαz
ε)|2(α, t)dα,
we obtain
I ≤ C‖F(zε)‖L∞‖Λ(σε)‖L∞‖∂nαzε‖2L2 ≤ expC(‖F(zε)‖2
L∞ + ‖zε‖2H3).
22

Sketch of the proof
Finally, for t ≤ T ε we have
d
dt‖zε‖2
Hn(t) ≤ C expC(‖F(zε)‖2L∞(t) + ‖zε‖2
Hn(t)).
and
d
dt‖F(zε)‖2
L∞(t) ≤ C expC(‖F(zε)‖2L∞(t) + ‖zε‖2
H3(t)),
Therefore
d
dt(‖zε‖2
Hn(t) + ‖F(zε)‖2L∞(t)) ≤ C expC(‖zε‖2
Hn(t) + ‖F(zε)‖2L∞(t))
for t ≤ T ε.Integrating together with
mε(t) ≥ m(0)−∫ t
0
expC(‖F(zε)‖2L∞(s) + ‖zε‖2
H3(s))ds,
q.e.d.
23

The fluid interface problem
Equation
ρt + u · ∇ρ = 0,∇ · u = 0,ρ(ut + (u · ∇)u) = −∇p − (0, gρ),
ρ(x , t) =
ρ1, x ∈ Ω1(t)ρ2, x ∈ Ω2(t),
Interface dynamics for incompressible flows in 2D

Previous works
Rayleigh (1879)Taylor (1950)Craig (1985)Ebin (1987)Beale, Hou & Lowengrub (1993)Wu (1997)Christodoulou & Lindblad (2000)Lindblad (2005)Ambrose & Masmoudi (2005)Coutand & Shkoller (2007)Shatah & Zeng (2008)Zhang & Zhang (2008)
Interface dynamics for incompressible flows in 2D

Contour equation
We consider ∂Ωj(t) = z(α, t) = (z1(α, t), z2(α, t)) : α ∈ R:z(α + 2πk , t) = z(α, t) + (2πk ,0),
z(α + 2πk , t) = z(α, t).
We study the irrotational case
ω(x , t) = $(α, t)δ(x − z(α, t)).
Biot-Savart yields
u(x , t) =1
2πPV
∫(x − z(β, t))⊥
|x − z(β, t)|2$(β, t)dβ,
for x 6= z(α, t).
Interface dynamics for incompressible flows in 2D

Contour equation
We consider ∂Ωj(t) = z(α, t) = (z1(α, t), z2(α, t)) : α ∈ R:z(α + 2πk , t) = z(α, t) + (2πk ,0),
z(α + 2πk , t) = z(α, t).
We study the irrotational case
ω(x , t) = $(α, t)δ(x − z(α, t)).
Biot-Savart yields
u(x , t) =1
2πPV
∫(x − z(β, t))⊥
|x − z(β, t)|2$(β, t)dβ,
for x 6= z(α, t).
Interface dynamics for incompressible flows in 2D

Contour equation
We consider ∂Ωj(t) = z(α, t) = (z1(α, t), z2(α, t)) : α ∈ R:z(α + 2πk , t) = z(α, t) + (2πk ,0),
z(α + 2πk , t) = z(α, t).
We study the irrotational case
ω(x , t) = $(α, t)δ(x − z(α, t)).
Biot-Savart yields
u(x , t) =1
2πPV
∫(x − z(β, t))⊥
|x − z(β, t)|2$(β, t)dβ,
for x 6= z(α, t).
Interface dynamics for incompressible flows in 2D

Then ( Bernoulli’s law)
Contour equation
$t = −2Aρ∂tBR(z, $) · ∂αz − Aρ∂α(|$|2
4|∂αz|2) + ∂α(c$)
+ 2Aρc ∂αBR(z, $) · ∂αz(α, t)− 2Aρg∂αz2,
(4)
for Aρ = (ρ2 − ρ1)/(ρ2 + ρ1) and c parametrization freedom.
Contour equation
zt = BR(z, $) + c ∂αz. (5)
Equations (4) and (5) give weak solutions of Euler.
We can choose c to get |∂αz(α, t)|2 = A(t).
Interface dynamics for incompressible flows in 2D

Then ( Bernoulli’s law)
Contour equation
$t = −2Aρ∂tBR(z, $) · ∂αz − Aρ∂α(|$|2
4|∂αz|2) + ∂α(c$)
+ 2Aρc ∂αBR(z, $) · ∂αz(α, t)− 2Aρg∂αz2,
(4)
for Aρ = (ρ2 − ρ1)/(ρ2 + ρ1) and c parametrization freedom.
Contour equation
zt = BR(z, $) + c ∂αz. (5)
Equations (4) and (5) give weak solutions of Euler.
We can choose c to get |∂αz(α, t)|2 = A(t).
Interface dynamics for incompressible flows in 2D

Then ( Bernoulli’s law)
Contour equation
$t = −2Aρ∂tBR(z, $) · ∂αz − Aρ∂α(|$|2
4|∂αz|2) + ∂α(c$)
+ 2Aρc ∂αBR(z, $) · ∂αz(α, t)− 2Aρg∂αz2,
(4)
for Aρ = (ρ2 − ρ1)/(ρ2 + ρ1) and c parametrization freedom.
Contour equation
zt = BR(z, $) + c ∂αz. (5)
Equations (4) and (5) give weak solutions of Euler.
We can choose c to get |∂αz(α, t)|2 = A(t).
Interface dynamics for incompressible flows in 2D

Then ( Bernoulli’s law)
Contour equation
$t = −2Aρ∂tBR(z, $) · ∂αz − Aρ∂α(|$|2
4|∂αz|2) + ∂α(c$)
+ 2Aρc ∂αBR(z, $) · ∂αz(α, t)− 2Aρg∂αz2,
(4)
for Aρ = (ρ2 − ρ1)/(ρ2 + ρ1) and c parametrization freedom.
Contour equation
zt = BR(z, $) + c ∂αz. (5)
Equations (4) and (5) give weak solutions of Euler.
We can choose c to get |∂αz(α, t)|2 = A(t).
Interface dynamics for incompressible flows in 2D

Conditions
Arc-chord:
F(z)(α, β, t) =|β|
|z(α, t)− z(α− β, t)|∀α, β ∈ (−π, π),
andF(z)(α,0, t) =
1|∂αz(α, t)|
.
Rayleigh-Taylor:
σ(α, t) = −(∇p2(z(α, t), t)−∇p1(z(α, t), t)) ·∂⊥α z(α, t) > 0.
Interface dynamics for incompressible flows in 2D

Conditions
Arc-chord:
F(z)(α, β, t) =|β|
|z(α, t)− z(α− β, t)|∀α, β ∈ (−π, π),
andF(z)(α,0, t) =
1|∂αz(α, t)|
.
Rayleigh-Taylor:
σ(α, t) = −(∇p2(z(α, t), t)−∇p1(z(α, t), t)) ·∂⊥α z(α, t) > 0.
Interface dynamics for incompressible flows in 2D

Local-existence
Cordoba, Cordoba & Gancedo (2008)
Theorem
Let z0(α) ∈ Hk and $0(α) ∈ Hk−1 for k ≥ 4,
F(z0)(α, β) <∞, and σ(α,0) > 0.
Then there exists a time T > 0 so that we have a solution to (4)and (5) in the case ρ1 = 0, where z(α, t) ∈ C1([0,T]; Hk ) and$(α, t) ∈ C1([0,T]; Hk−1) with z(α,0) = z0(α) and$(α,0) = $0(α).
Interface dynamics for incompressible flows in 2D

The linearized equation
ftt (α, t) = −σΛ(f )(α, t),
σ < 0⇒ e|σξ|
12 t , e−|σξ|
12 t
σ > 0⇒ cos(|σξ|12 t), sin(|σξ|
12 t)
It can be written as follows:
ft (α, t) = H(g)(α, t),gt (α, t) = −σ∂αf (α, t),
and therefore
EL(t) =
∫(σ|∂αf |2 + |Λ
12 g|2)dα.
Interface dynamics for incompressible flows in 2D

The linearized equation
ftt (α, t) = −σΛ(f )(α, t),
σ < 0⇒ e|σξ|
12 t , e−|σξ|
12 t
σ > 0⇒ cos(|σξ|12 t), sin(|σξ|
12 t)
It can be written as follows:
ft (α, t) = H(g)(α, t),gt (α, t) = −σ∂αf (α, t),
and therefore
EL(t) =
∫(σ|∂αf |2 + |Λ
12 g|2)dα.
Interface dynamics for incompressible flows in 2D

The linearized equation
ftt (α, t) = −σΛ(f )(α, t),
σ < 0⇒ e|σξ|
12 t , e−|σξ|
12 t
σ > 0⇒ cos(|σξ|12 t), sin(|σξ|
12 t)
It can be written as follows:
ft (α, t) = H(g)(α, t),gt (α, t) = −σ∂αf (α, t),
and therefore
EL(t) =
∫(σ|∂αf |2 + |Λ
12 g|2)dα.
Interface dynamics for incompressible flows in 2D

Energy of the system
Case z ∈ H4:
E(t) = ‖z‖2H3(t) +
∫ π
−π
σ(α, t)ρ2|∂αz(α, t)|2
|∂4αz(α, t)|2dα
+ ‖F(z)‖2L∞(t) + ‖$‖2H2(t) + ‖ϕ‖2H4− 1
2(t),
for σ(α, t) > 0 and ϕ(α, t) given by
ϕ(α, t) =$(α, t)
2|∂αz(α, t)|− c(α, t)|∂αz(α, t)|.
Beale, Hou & Lowengrub (1993)Ambrose & Masmoudi (2005)
Interface dynamics for incompressible flows in 2D

Equation in terms of ϕ(α, t)
Case Aρ = 0 (vortex sheet problem):
$t (α, t) = ∂α(c$)(α, t).
Kelvin-Helmholtz instability arises.
The linear formulation is given by
ftt (α, t) = −∂2αf (α, t) ⇒ e|ξ|t , e−|ξ|t
Case Aρ = 1 (water wave):
ϕt = −∂α(ϕ2)
2|∂αz|− B(t)ϕ− ∂tBR(z, $) · ∂αz
|∂αz|
− g∂αz2
|∂αz|− ∂t (c|∂αz|).
Interface dynamics for incompressible flows in 2D

Equation in terms of ϕ(α, t)
Case Aρ = 0 (vortex sheet problem):
$t (α, t) = ∂α(c$)(α, t).
Kelvin-Helmholtz instability arises.
The linear formulation is given by
ftt (α, t) = −∂2αf (α, t) ⇒ e|ξ|t , e−|ξ|t
Case Aρ = 1 (water wave):
ϕt = −∂α(ϕ2)
2|∂αz|− B(t)ϕ− ∂tBR(z, $) · ∂αz
|∂αz|
− g∂αz2
|∂αz|− ∂t (c|∂αz|).
Interface dynamics for incompressible flows in 2D

Equation in terms of ϕ(α, t)
Case Aρ = 0 (vortex sheet problem):
$t (α, t) = ∂α(c$)(α, t).
Kelvin-Helmholtz instability arises.
The linear formulation is given by
ftt (α, t) = −∂2αf (α, t) ⇒ e|ξ|t , e−|ξ|t
Case Aρ = 1 (water wave):
ϕt = −∂α(ϕ2)
2|∂αz|− B(t)ϕ− ∂tBR(z, $) · ∂αz
|∂αz|
− g∂αz2
|∂αz|− ∂t (c|∂αz|).
Interface dynamics for incompressible flows in 2D

Estimates on the inverse operator (I + T )−1
Let T be defined by T (u)(α, t) = 2BR(z,u)(α) · ∂αz(α),
then T : L2 → H1 and ‖T‖L2→H1 ≤ ‖F(z)‖4L∞‖z‖4C2,δ .
$t (α, t) = (I + T )−1(R(z, $))(α, t).
Baker, Meiron & Orszag (1982).Córdoba, Córdoba & Gancedo (2008):
‖(I + T )−1‖L2→L2 ≤ eC(‖z‖2H3 +‖F (z)‖2
L∞ ),
(conformal mappings, Hopf lemma andDahlberg-Harnack).
Interface dynamics for incompressible flows in 2D

Estimates on the inverse operator (I + T )−1
Let T be defined by T (u)(α, t) = 2BR(z,u)(α) · ∂αz(α),
then T : L2 → H1 and ‖T‖L2→H1 ≤ ‖F(z)‖4L∞‖z‖4C2,δ .
$t (α, t) = (I + T )−1(R(z, $))(α, t).
Baker, Meiron & Orszag (1982).Córdoba, Córdoba & Gancedo (2008):
‖(I + T )−1‖L2→L2 ≤ eC(‖z‖2H3 +‖F (z)‖2
L∞ ),
(conformal mappings, Hopf lemma andDahlberg-Harnack).
Interface dynamics for incompressible flows in 2D

Estimates on the inverse operator (I + T )−1
Let T be defined by T (u)(α, t) = 2BR(z,u)(α) · ∂αz(α),
then T : L2 → H1 and ‖T‖L2→H1 ≤ ‖F(z)‖4L∞‖z‖4C2,δ .
$t (α, t) = (I + T )−1(R(z, $))(α, t).
Baker, Meiron & Orszag (1982).Córdoba, Córdoba & Gancedo (2008):
‖(I + T )−1‖L2→L2 ≤ eC(‖z‖2H3 +‖F (z)‖2
L∞ ),
(conformal mappings, Hopf lemma andDahlberg-Harnack).
Interface dynamics for incompressible flows in 2D

Estimates on the inverse operator (I + T )−1
Let T be defined by T (u)(α, t) = 2BR(z,u)(α) · ∂αz(α),
then T : L2 → H1 and ‖T‖L2→H1 ≤ ‖F(z)‖4L∞‖z‖4C2,δ .
$t (α, t) = (I + T )−1(R(z, $))(α, t).
Baker, Meiron & Orszag (1982).Córdoba, Córdoba & Gancedo (2008):
‖(I + T )−1‖L2→L2 ≤ eC(‖z‖2H3 +‖F (z)‖2
L∞ ),
(conformal mappings, Hopf lemma andDahlberg-Harnack).
Interface dynamics for incompressible flows in 2D

Estimates on the inverse operator (I + T )−1
Let T be defined by T (u)(α, t) = 2BR(z,u)(α) · ∂αz(α),
then T : L2 → H1 and ‖T‖L2→H1 ≤ ‖F(z)‖4L∞‖z‖4C2,δ .
$t (α, t) = (I + T )−1(R(z, $))(α, t).
Baker, Meiron & Orszag (1982).Córdoba, Córdoba & Gancedo (2008):
‖(I + T )−1‖L2→L2 ≤ eC(‖z‖2H3 +‖F (z)‖2
L∞ ),
(conformal mappings, Hopf lemma andDahlberg-Harnack).
Interface dynamics for incompressible flows in 2D

A priori energy estimates
E(t) = ‖z‖2H3(t) +
∫ π
−π
σ(α, t)ρ2|∂αz(α, t)|2
|∂4αz(α, t)|2dα
+ ‖F(z)‖2L∞(t) + ‖$‖2H2(t) + ‖ϕ‖2H4− 1
2(t).
LemmaLet z(α, t) and $(α, t) be a solution of (4) and (5). Then, thefollowing a priori estimate holds:
ddt
E(t) ≤ Cmq(t)
exp(CE(t)),
for m(t) = minα∈[−π,π]
σ(α, t) = σ(αt , t) > 0 and C and q some
universal constants.
Interface dynamics for incompressible flows in 2D

The Rayleigh-Taylor condition
The true energy: ERT (t) = E(t) +1
mε(t).
One gets σε(α, t) ∈ C1([0,T ε]× [−π, π]),
and therefore mε(t) is Lipschitz.
ddt
(mε)(t) = σεt (αt , t),ddt
(1
mε)(t) =
−σεt (αt , t)(mε(t))2 ,
for almost every t .It yields
ddt
ERT (t) ≤ C exp(CERT (t)),
almost everywhere and therefore
ERT (t) ≤ − 1C
ln(exp(−CERT (0))− C2t).
Interface dynamics for incompressible flows in 2D

The Rayleigh-Taylor condition
The true energy: ERT (t) = E(t) +1
mε(t).
One gets σε(α, t) ∈ C1([0,T ε]× [−π, π]),
and therefore mε(t) is Lipschitz.
ddt
(mε)(t) = σεt (αt , t),ddt
(1
mε)(t) =
−σεt (αt , t)(mε(t))2 ,
for almost every t .It yields
ddt
ERT (t) ≤ C exp(CERT (t)),
almost everywhere and therefore
ERT (t) ≤ − 1C
ln(exp(−CERT (0))− C2t).
Interface dynamics for incompressible flows in 2D

The Rayleigh-Taylor condition
The true energy: ERT (t) = E(t) +1
mε(t).
One gets σε(α, t) ∈ C1([0,T ε]× [−π, π]),
and therefore mε(t) is Lipschitz.
ddt
(mε)(t) = σεt (αt , t),ddt
(1
mε)(t) =
−σεt (αt , t)(mε(t))2 ,
for almost every t .It yields
ddt
ERT (t) ≤ C exp(CERT (t)),
almost everywhere and therefore
ERT (t) ≤ − 1C
ln(exp(−CERT (0))− C2t).
Interface dynamics for incompressible flows in 2D

The Rayleigh-Taylor condition
The true energy: ERT (t) = E(t) +1
mε(t).
One gets σε(α, t) ∈ C1([0,T ε]× [−π, π]),
and therefore mε(t) is Lipschitz.
ddt
(mε)(t) = σεt (αt , t),ddt
(1
mε)(t) =
−σεt (αt , t)(mε(t))2 ,
for almost every t .It yields
ddt
ERT (t) ≤ C exp(CERT (t)),
almost everywhere and therefore
ERT (t) ≤ − 1C
ln(exp(−CERT (0))− C2t).
Interface dynamics for incompressible flows in 2D

Vortex Sheets
Equation
ut + (u · ∇)u = −∇p,
∇ · u = 0,
ω(x , t) = $(α, t)δ(x − z(α, t)).
Contour equation
zt = BR(z, $) + c∂αz,$t = ∂α(c$)
(6)
Interface dynamics for incompressible flows in 2D

Vortex Sheets
Equation
ut + (u · ∇)u = −∇p,
∇ · u = 0,
ω(x , t) = $(α, t)δ(x − z(α, t)).
Contour equation
zt = BR(z, $) + c∂αz,$t = ∂α(c$)
(6)
Interface dynamics for incompressible flows in 2D

The Parametrization
Linearizing$(α, t) = 1⇒ e|ξ|t , e−|ξ|t .
We study the case:∫$(α,0)dα = 0.
We take a parametrization given by c = 12H($).Let us point out
that for z(α, t) = (α,0) it follows:
BR(z, $)(α, t) =12
H($)(α, t)(0,1).
For the amplitude one finds
$t −12∂α($H$) = 0.
Castro, Córdoba & Gancedo (2009)
Interface dynamics for incompressible flows in 2D

The Parametrization
Linearizing$(α, t) = 1⇒ e|ξ|t , e−|ξ|t .
We study the case:∫$(α,0)dα = 0.
We take a parametrization given by c = 12H($).Let us point out
that for z(α, t) = (α,0) it follows:
BR(z, $)(α, t) =12
H($)(α, t)(0,1).
For the amplitude one finds
$t −12∂α($H$) = 0.
Castro, Córdoba & Gancedo (2009)
Interface dynamics for incompressible flows in 2D

The Parametrization
Linearizing$(α, t) = 1⇒ e|ξ|t , e−|ξ|t .
We study the case:∫$(α,0)dα = 0.
We take a parametrization given by c = 12H($).Let us point out
that for z(α, t) = (α,0) it follows:
BR(z, $)(α, t) =12
H($)(α, t)(0,1).
For the amplitude one finds
$t −12∂α($H$) = 0.
Castro, Córdoba & Gancedo (2009)
Interface dynamics for incompressible flows in 2D

The Parametrization
Linearizing$(α, t) = 1⇒ e|ξ|t , e−|ξ|t .
We study the case:∫$(α,0)dα = 0.
We take a parametrization given by c = 12H($).Let us point out
that for z(α, t) = (α,0) it follows:
BR(z, $)(α, t) =12
H($)(α, t)(0,1).
For the amplitude one finds
$t −12∂α($H$) = 0.
Castro, Córdoba & Gancedo (2009)
Interface dynamics for incompressible flows in 2D

The Parametrization
Linearizing$(α, t) = 1⇒ e|ξ|t , e−|ξ|t .
We study the case:∫$(α,0)dα = 0.
We take a parametrization given by c = 12H($).Let us point out
that for z(α, t) = (α,0) it follows:
BR(z, $)(α, t) =12
H($)(α, t)(0,1).
For the amplitude one finds
$t −12∂α($H$) = 0.
Castro, Córdoba & Gancedo (2009)
Interface dynamics for incompressible flows in 2D

Ill-posedness for the amplitude equation
If we takeΩ(α, t) = H$(α, t)− i$(α, t),
by using the Green’s function, Ω can be extended analyticallyon the unit ball and satisfies
Ωt (u, t)−12
iuΩ(u, t)Ωu(u, t) = 0, with u = reiα.
Complex trajectories:
Xt (u, t) = −12
iX (u, t)Ω(X (u, t), t), with X (u,0) = u.
Therefore Ω(X (u, t), t) = Ω(u,0) and X (u, t) = ue−12 iΩ(u,0)t .
Interface dynamics for incompressible flows in 2D

Ill-posedness for the amplitude equation
If we takeΩ(α, t) = H$(α, t)− i$(α, t),
by using the Green’s function, Ω can be extended analyticallyon the unit ball and satisfies
Ωt (u, t)−12
iuΩ(u, t)Ωu(u, t) = 0, with u = reiα.
Complex trajectories:
Xt (u, t) = −12
iX (u, t)Ω(X (u, t), t), with X (u,0) = u.
Therefore Ω(X (u, t), t) = Ω(u,0) and X (u, t) = ue−12 iΩ(u,0)t .
Interface dynamics for incompressible flows in 2D

Ill-posedness for the amplitude equation
If we takeΩ(α, t) = H$(α, t)− i$(α, t),
by using the Green’s function, Ω can be extended analyticallyon the unit ball and satisfies
Ωt (u, t)−12
iuΩ(u, t)Ωu(u, t) = 0, with u = reiα.
Complex trajectories:
Xt (u, t) = −12
iX (u, t)Ω(X (u, t), t), with X (u,0) = u.
Therefore Ω(X (u, t), t) = Ω(u,0) and X (u, t) = ue−12 iΩ(u,0)t .
Interface dynamics for incompressible flows in 2D

Ill-posedness for the amplitude equation
If we takeΩ(α, t) = H$(α, t)− i$(α, t),
by using the Green’s function, Ω can be extended analyticallyon the unit ball and satisfies
Ωt (u, t)−12
iuΩ(u, t)Ωu(u, t) = 0, with u = reiα.
Complex trajectories:
Xt (u, t) = −12
iX (u, t)Ω(X (u, t), t), with X (u,0) = u.
Therefore Ω(X (u, t), t) = Ω(u,0) and X (u, t) = ue−12 iΩ(u,0)t .
Interface dynamics for incompressible flows in 2D

The formula X (u, t) = ue−12 iΩ(u,0)t yields
|X (eiα0 , t)| < 1 for $(α0,0) > 0 and t > 0.
If we denote X (eiα0 , t) = R(α0, t)eiΘ(α0,t), Ω satisfies
dnΩ
dΘn (X (eiα0 , t), t) =dnΩdαn (eiα0 ,0)
(1− 12Ωα(eiα0 ,0)t)n+1
+ “l.o.t.”.
Interface dynamics for incompressible flows in 2D

The formula X (u, t) = ue−12 iΩ(u,0)t yields
|X (eiα0 , t)| < 1 for $(α0,0) > 0 and t > 0.
If we denote X (eiα0 , t) = R(α0, t)eiΘ(α0,t), Ω satisfies
dnΩ
dΘn (X (eiα0 , t), t) =dnΩdαn (eiα0 ,0)
(1− 12Ωα(eiα0 ,0)t)n+1
+ “l.o.t.”.
Interface dynamics for incompressible flows in 2D