



γλώσσες
Σελίδες
Νομικός


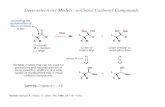
Maxwellian models oversimplified viscoelas3c responses and thus give approximate predic3ons.
FALL 2014: EMCH 315 1
Creep ε
εo
t
Real
Maxwell Model
To overcome limitations of Maxwell model alternative arrangements of elements have been proposed: e.g. ______________________ Model with_____________________ arrangement of spring and dashpot.
Most materials exhibit nonlinear creep rates
models steady-state creep (i.e. constant creep rate )
Voight-Kelvin parallel

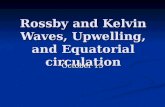
Voight-‐Kelvin Material Model: beLer represents ___________________ _______________________ creep.
Ini3ally the dashpot must carry the en3re force because the spring can carry a force only when extended. The force in the V-‐K model will be equal to the force in the dashpot________the force in the spring: hence ____________ {_______________________} Strains are no longer______________ as the dashpot will __________ the spring to have the same deforma3on thus deforma3on compa3bility: _____________
FALL 2014: EMCH 315 2
σ
plus σ = σs + σd statically indeterminant
independent constrain
ε = εs = εd
non-steady state transient

Equilibrium and compa3bility arguments can be rewriLen to convey that the response is ____________________.
force equilibrium: σ(t) = σs(t) + σd(t)
compa3bility: ε(t) = εs(t) = εd(t)
stress-‐strain rela3onship for the spring:
stress strain rela3onship for the dashpot:
FALL 2014: EMCH 315 3
_______________
_______________
_______________
_______________
σs(t) = Eεs(t)
dεd/dt = (1/η)σd(t)
σs(t) = Eε(t)
dε/dt = (1/η)σd(t)
time-dependent

To determine the governing cons3tu3ve equa3on, subs3tute the equa3ons for the spring and dashpot into the equilibrium equa3on. The governing stress-‐strain differen3al equa3on: Stress depends not only on the strain, but also the strain rate Solu3on to the first-‐order linear differen3al equa3on (see next slide)
FALL 2014: EMCH 315 4
σ =η dε(t )dt
+ Eε(t )
ε(t ) = σE1− e− t /τ⎡⎣ ⎤⎦ where τ =η E

FALL 2014: EMCH 315 5

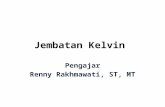
An instantaneous strain cannot be imposed as the dashpot must deform prior to the spring in the V-‐K model.
FALL 2014: EMCH 315 6
ε
t
Imposed condition σ
σo
t
Non-linear creep response

at t = 0 at time t as t → ∞
An instantaneous strain ___________ be imposed because the model can only deform with 3me as the dashpot must deform prior to the spring in the V-‐K model.
FALL 2014: EMCH 315 7
ε
t
ε(t ) = σE1− e− t /τ⎡⎣ ⎤⎦
cannot
ε∞ = σ/E
ε = 0

FALL 2014: EMCH 315 8
ε
t
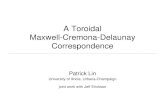
Now we remove the stress at some arbitrary time
ε1
models __________________ creep: ____________ down as time passes
strain ___________ toward ____________ due to spring in parallel arrangement __________ on the dashpot εo
εo
εp
εp
t1
Maxwell Model
Voight-Kelvin
transient slows
decreases zero
pulling

FALL 2014: EMCH 315 9
ε
t
σ = Eε +η dεdt
= 0ε1
⇒η dεdt
= −Eε
The time-dependent strain can be determined after we remove the stress at a new t=0, while ε = ε1.
can’t account for __________________ for a constant strain, dε/dt = 0 and εE = σ
ε = ε1e− t /τ
stress relaxation

FALL 2014: EMCH 315 10
Viscoelas3c Materials Their uses Asphalt Roads (moves with t and T) Silly puLy Toys Polymeric foams Seat Cushions, maLress topper Glass Dinnerware, labware Rubber Bands Hold things together Metals (T >Tm/2) W filament in light bulbs, turbine blades
Plas3c/polymer items Sun glasses Rubber bumpers in cars Absorbs energy from impact Wood Sagging with 3me as viscoelas3c response Nylon Guitar String Rockin’ Out! Steel plates coated with viscoelas3c polymer
Damping of vibra3onal energy
Discs in human spines Slip disc, rupture of discs Skin Holds us together New born baby’s skull Protects the brain and other important parts

Examples and Applica3ons of Viscoelas3c Materials
• Creep and Recovery
Materials which behave elas3cally at room temperature oien aLain significant viscoelas3c proper3es when heated. Such is the case with metal turbine blades in jet engines, which reach very high temperatures and need to withstand very high tensile stresses. Conven3onal metals can creep significantly at high temperatures and this has led to the development of creep-‐resistant alloys; turbine blades are now oien made of so called superalloys which contain some or all of nickel, cobalt, chromium, aluminum, 3tanium, tungsten and molybdenum.
FALL 2014: EMCH 315 11

Examples and Applica3ons of Viscoelas3c Materials
• Creep and Recovery
Disks in the human spine are viscoelas3c. Creep under normal body weight and get shorter with 3me. Lying down allows the spinal disks to recover, and thus most people are taller in the morning than in the evening.
Skin 3ssue is viscoelas3c. Ex. Pinching the skin at the back of the hand; it takes 3me to recover back to its original flat posi3on. The longer the skin is held in the pinched posi3on, the longer it takes to recover. The more rapidly it is pinched, the less 3me it takes to recover – it behaves “more elas3cally”.
FALL 2014: EMCH 315 12

Examples and Applica3ons of Viscoelas3c Materials
• Creep and Recovery
Wood is viscoelas3c. Creep under the weight of the roof and garavity can take many decades or centuries to be no3ceable.
Polymer foams used in seat cushions. Seat cushions creep to allow progressive conforma3on of the cushion to the body shape.
FALL 2014: EMCH 315 13

Examples and Applica3ons of Viscoelas3c Materials
• Energy Absorp3on
Viscoelas3c materials have the property of absorbing vibra3onal energy, damping the vibra3ons.
Used in tall buildings which can vibrate when dynamically loaded by wind or earthquakes.
Viscoelas3c materials are excellent impact absorbers. A peak impact force can be reduced by a factor of two if an impact buffer is made of viscoelas3c, rather than elas3c materials. Elastomers (any of various substances resembling rubber) are highly viscoelas3c and make good impact absorbers.
FALL 2014: EMCH 315 14

Examples and Applica3ons of Viscoelas3c Materials
• Energy Absorp3on Viscoelas3c materials are used in automobile bumpers, on computer drives to protect from mechanical shock, in helmets (the foam padding inside), in wrestling mats, etc. Viscoelas3c materials are also used in shoe insoles to reduce impact transmiLed to a person's skeleton. The car3lage at the ends of the femur and 3bia, in the knee joint, is a natural shock absorber. In an osteoarthri3c knee, the car3lage has degraded -‐ some3mes the bones grind against each other causing great pain. Synthe3c viscoelas3c materials can be injected directly into an osteoarthri3c knee, enveloping car3lage-‐deficient joints and ac3ng as a lubricant and shock absorber
FALL 2014: EMCH 315 15

FALL 2014: EMCH 315 16
The behavior of many viscoelastic materials lies between the behavior of a spring or a dashpot and is described by a combination of the Hookean (spring) and Newtonian (dashpot) elements. A couple of possibilities:
σ
σ
time __________ response
time __________ response

The models described so far provide a qualita3ve illustra3on of the viscoelas3c behavior of polymers.
• The Maxwell element is the most suited to represent fluid polymers: the permanent flow predominates on the longer term, while the short-‐term response is elas3c.
• The Voight-‐Kelvin element, with an added spring and, if necessary, a dashpot, is beLer suited to describe the nature of a solid polymer.
FALL 2014: EMCH 315 17

Both models, the Maxwell element and the Voight-‐Kelvin element, are limited in their representa3on of the actual viscoelas3c behavior.
Maxwell • Capable of modeling both
stress relaxa3on and creep. • Predicts that the stress relaxes
to zero: In reality, the stress levels off at some finite value.
• Predicts that creep strain accumulates linearly with 3me; in reality, strain can accumulate non-‐linearly.
Voight-‐Kelvin • Predicts the more realis3c
case of transient (non-‐linear) creep.
• Predicts recovery. • Cannot impose instantaneous
strain, thus, cannot model stress relaxa3on.
FALL 2014: EMCH 315 18

– elas3c (ability to stretch and return to its original length)
– plas3c (permanent deforma3on) – viscoelas3c (elas3c and 3me-‐dependent response) – creep (length changes over 3me under constant load)
FALL 2014: EMCH 315 19
General descrip3ons of mechanical responses are

E MCH 315 Mechanical Response of Engineering Materials
Lecture 27 Creep I Chap. 10
FALL 2014: EMCH 315 Lecture 27: Slide 20

FALL 2014: EMCH 315 21

FALL 2014: EMCH 315 22
Creep Experiment

Defini3on: _______________ that increases as a func3on of _____________ and _____________ under ________________. For _____________ solids, service _____________________ exceed ___________ of Tm.
FALL 2014: EMCH 315 23
Permanent strain time temperature constant stress
temperatures (absolute) 30 - 40%
Response
tr
ε0
ε
t
σ
t
Imposed condition
TIME
crystalline

Three stages of creep behavior: Stage I
FALL 2014: EMCH 315 24
t1
ε1
I II III
ε2
t2 tr
ε0
ε
t
Primary Stage -- a.k.a. ______________
slope of ε vs t plot is the strain rate: Slope initially high then slope __________ until it becomes constant Decreasing transient creep strain rate due to _____________ processes:
at the ____________- thermally activated softening (or annealing) dominates
_____________ strain hardening
facilitates increasing creep resistance
decreases
opposing beginning
eventually

Three stages of creep behavior: Stage II
FALL 2014: EMCH 315 25
t1
ε1
I II III
ε2
t2 tr
ε0
ε
t
Secondary Stage -- a.k.a. ______________
II.
continued strain-hardening and ongoing annealing processes reach _______________ equilibrium 90% of life
initiates when ε becomes _______________ after Stage Iconstant
steady - state

Three stages of creep behavior: Stage III
FALL 2014: EMCH 315 26
t1
ε1
I II III
ε2
t2 tr
ε0
X rupture
ε
t
___________________ III. initiates at end of stage II when increases in an _________ manner deformation becomes _________ by the formation of a ________ as in a tension test thus represents onset of structural _________ leading to fracture/rupture terminates at time-to-rupture (tr)
ε unstable
localized neck
instability

Two types of design situa3ons occur in engineering prac3ce.
• _____________________– limits on total amount of strain tolerated by structural element (e.g. minimal clearances) – ____________________
• _________________________– life3me of the component prior to failure is cri3cal (creep strains can be tolerated) – _____________________
We want to determine
FALL 2014: EMCH 315 27
(requires predictive equations for ________________.
(requires predictive equations for ______________.)
ε = f (material properties, σ, T, t).
steady-state creep
creep rupture

Strain-‐limited design and predic3ve equa3ons for steady-‐state creep.
FALL 2014: EMCH 315 28
ε tot (t) =The total strain is calculated as
I II
ε
t
ε ssε0
3 contributions to the total strain. (i) instantaneous ____:
strain generated at loading
(ii) transient _______ : time dependent contribution β and η depend on stress, temperature, and material
(iii) steady-state _____ contribution when strain rate is constant

The transient term can be considered negligible rela3ve to the steady-‐state term.
FALL 2014: EMCH 315 29
I II III
ε
t
ε ss
calculation for the steady-state or linear creep rate
ε1,t1ε2,t2
ε tot (t) = εo +
ε ss =

Steady-‐state creep rates depend on stress and temperature.
FALL 2014: EMCH 315 30
What we want to know is the functional dependence of ____________________________________so that we can use this for design.
Raising either σ or T ________
Different constant stress levels at the same temperature.
The same constant stress levels for different temperatures.
ε ss

FALL 2014: EMCH 315 31
An equation of the form:
Where: A = coefficient, _________________________. ΔH = activation energy k = Boltzman’s constant (k = 1.38x10-23 J/K or
k = 6.79x10-23 in-lb/R) T = __________________________ ____________ R = 460 + °F
Ae -ΔH/kT εss =
describes steady state creep.
K = 273 + °C
(potential energy necessary to ____________
1/T
ln ε
ss
constant σ Ta
−1
Tb−1
Tc−1
material- and stress- dependent
temperature (absolute degrees)
drive creep

FALL 2014: EMCH 315 32
Consider two sets of data were collected each at different levels of constant stress.
1/T
ln ε
ss
σ1 σ2
same slope different slope
1/T
ln ε
ss
σ1 σ2
-ΔH k
-ΔH k ΔH (σ ) = ΔH
Activation energy can be stress dependent so _______________
ε ss = Ae kT

New material parameter .
FALL 2014: EMCH 315 33
φ =εoσ o
m
ε ssεo
= σσ o
⎛⎝⎜
⎞⎠⎟
m
e−ΔH (σ )
kT ε ss = φσ me
−ΔHkT ⇒
We consider cases when the instantaneous load can be considered quasi-static and the strain rate is __________:
ε ss =
σσ o
⎛⎝⎜
⎞⎠⎟
m
e−ΔH (σ )
kT
____________ creep rate equation.
Experimentally determined rela3onships for the stress dependence of the
steady-‐state creep rate are of the form ________
Normalized (or non-dimensionalized) form:
ϕ, m, and H are material parameters.

FALL 2014: EMCH 315 34
Shown below is the steady-state strain rate creep response for Al, determined at 230oC. What is the equation relating the steady-state strain rate to stress? What are the values of the two parameters for Al?
Recalling that we can rewrite the Dorn-‐Miller creep rate equa3on as and set
Rewrite a simplified form of the Dorn-Miller equation as
In-class problem (solution method for HW6 #1)
ε ss ∝σ m
ε ss =
1σ o
⎛⎝⎜
⎞⎠⎟
m
e−ΔH (σ )
kT σ m
B = 1σ o
⎛⎝⎜
⎞⎠⎟
m
e−ΔH (σ )
kT
NOTE: At a single temperature there is no way to say anything about temperature dependence of the strain rate. Using this form we can simply solve for two
parameters B and m

FALL 2014: EMCH 315 35
Take the logarithm of both sides “m” is the slope and can be calculated as sub
log εss = logB + m logσ
Solve for two parameters B and m
m =
log10 ε ss1 − log10 ε ss2( )log10σ 1 − log10σ 2( ) =
m typically ranges from 4.0 ≤ m ≤6.0
(σ 1, ε ss1)
B =ε ssσ m =

FALL 2014: EMCH 315 36
ln ε ss = ln
σσ o
⎛⎝⎜
⎞⎠⎟
m
+ − ΔH (σ )k
⎛⎝⎜
⎞⎠⎟1T
Taking the natural logarithm of ε ss :
In-class problem: Determine the complete Dorn-Miller steady state creep rate equation.
ε ss =
σσ o
⎛⎝⎜
⎞⎠⎟
m
e−ΔH (σ )
kT
can determine ΔH(σ ) from the slope of ln ε ss vs 1/T
By analyzing experimental data, we can ascertain whether the activation energy ΔH(σ) is indeed stress dependent.
we must determine _______________.

FALL 2014: EMCH 315 37
slope
δ (ln ε ss )δ (1 /T ) σ
= − ΔH (σ )k
Compare steady-state creep data for two different constant stress levels.
δ (ln ε ss )δ (1 /T ) σ =4 ksi
= δ (ln ε ss )δ (1 /T ) σ =6ksi

FALL 2014: EMCH 315 38
since slopes are iden3cal ⇒____________and activation energy is _______________
slope is defined by δ (ln ε ss )
δ (1 /T ) σ
=
for one value of σ, substitute Boltzman’s constant k (J/K or in-lb/R) in order to determine ΔH
Note units for k Convert T to R (T in °F) or Convert T to K (T in °C)
HW6 # 3: Given ΔH(σ) Plot

By analyzing data for different stress levels, we can determine the .
• Compare the same steady-‐state creep data for
FALL 2014: EMCH 315 39
Taking the logarithm of both sides to the base 10log10 ε ss = log10 B +m log10σ
remaining terms; .
different constant temperatures.
Use simplified D-M eqnε ss = Bσ
m

known data points will establish to determine σo
We can determine the Dorn-‐Miller steady state creep rate equa3on
With m, subs3tute previously determined and use data points to determine .
FALL 2014: EMCH 315 40
�
ε ss =
σσ o
⎛⎝⎜
⎞⎠⎟
m
e−ΔHkT
ΔH known σo
complete
εss ; T ; σ �
(see Example Prob. 10.2 for solution).
Top Related