



γλώσσες
Σελίδες
Νομικός


Preface
ElementaryLinear
Algebra
Introduction toGeometricComputing
Data Structuresand Algorithms
ObjectOrientation
(C++)
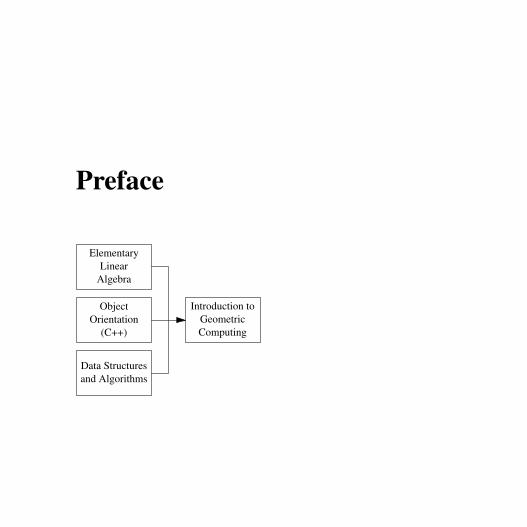
ComputerGraphics
and
Visualization
ComputationalGeometry Robotics Computer
Vision
Computer-AidedDesign
GeographicInformation
Systems
Classical Geometry Computing
Geometric Computing

Chapter 1
P (x, y)
x
y
x
y
Point E2d P[5];
P[0]. . . P[4]
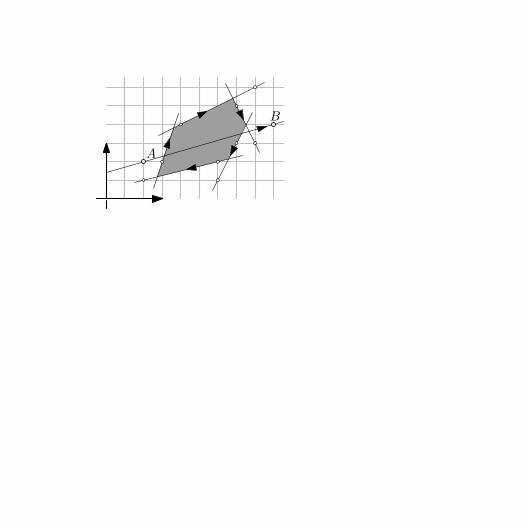
A
B
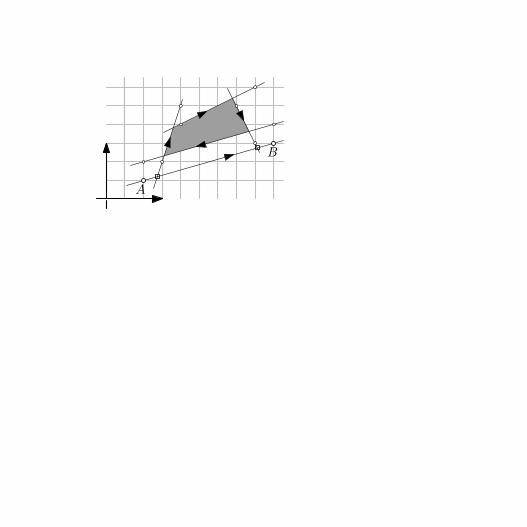
A
B
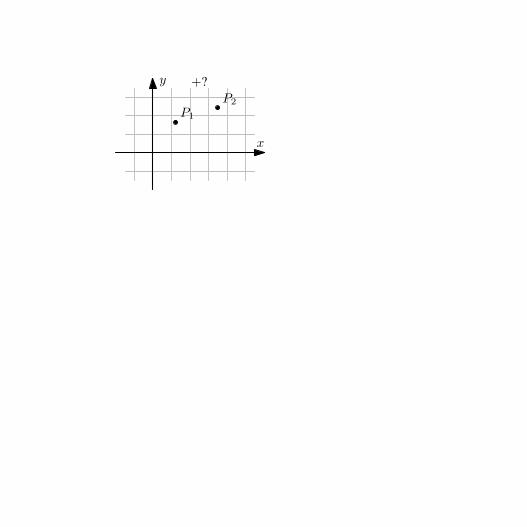
P2
x
y
P1
+?
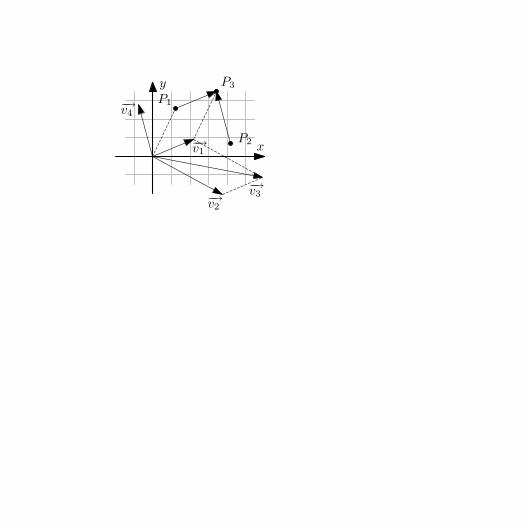
P3
x
yP1
−→v1
P2
−→v2
−→v4
−→v3
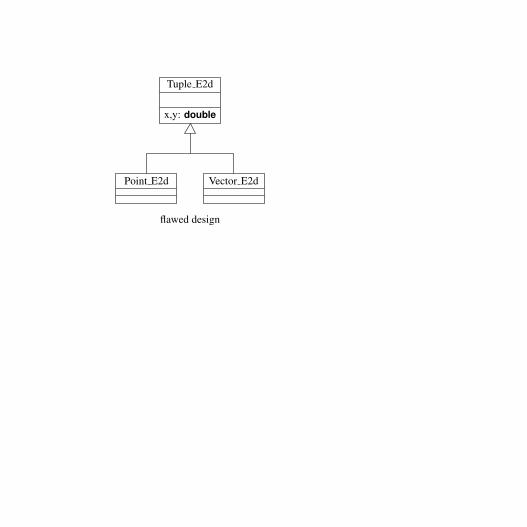
Tuple E2d
x,y: double
Point E2d Vector E2d
flawed design
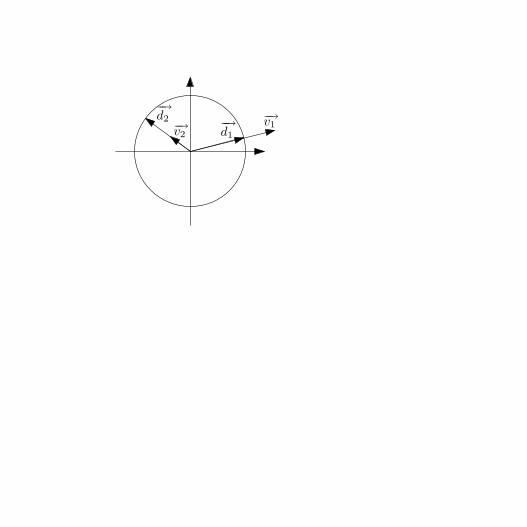
−→v1−→v2−→d1
−→d2

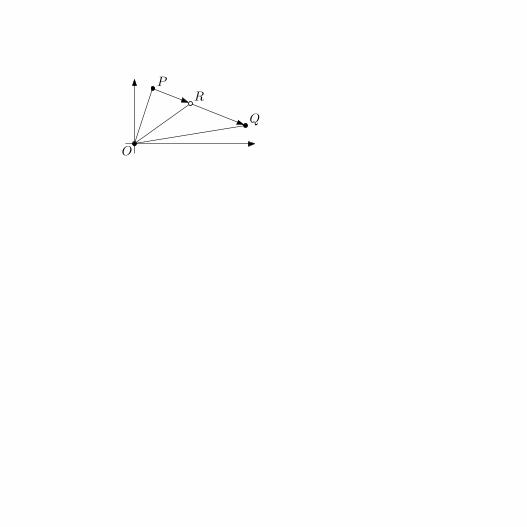
P
Q
R
O
P
Q
R
O
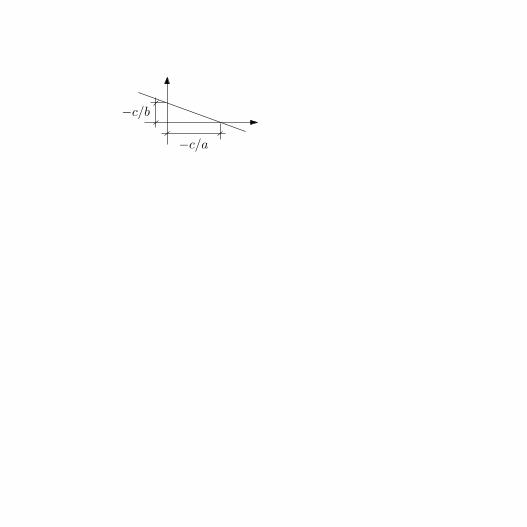
−c/a
−c/b
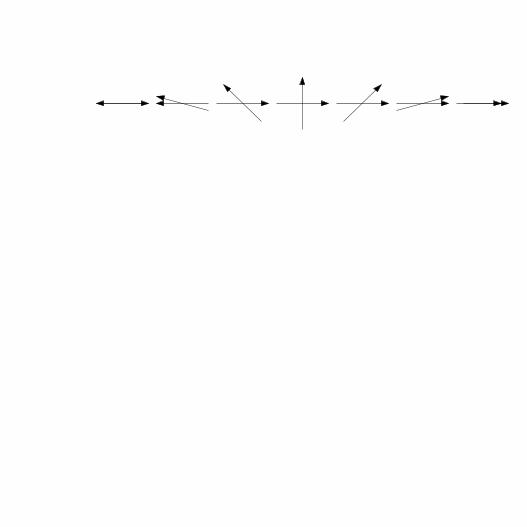
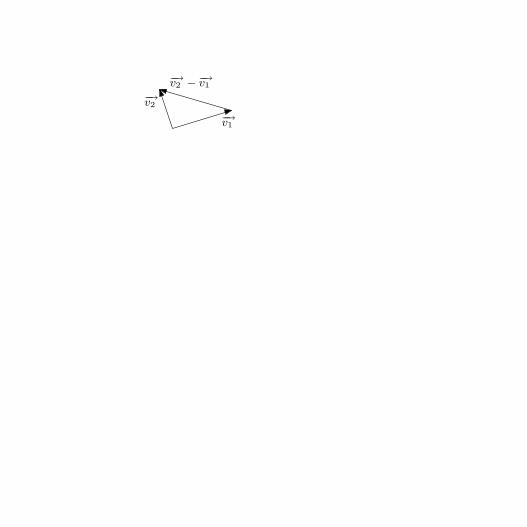
−→v1
−→v2
−→v2 −−→v1
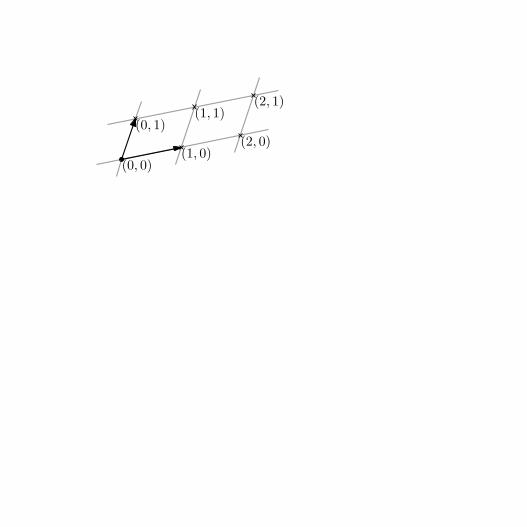
(0, 0)(1, 0)
(2, 0)(0, 1)
(1, 1)(2, 1)
−→v1
−→v2
−→v1−→v2
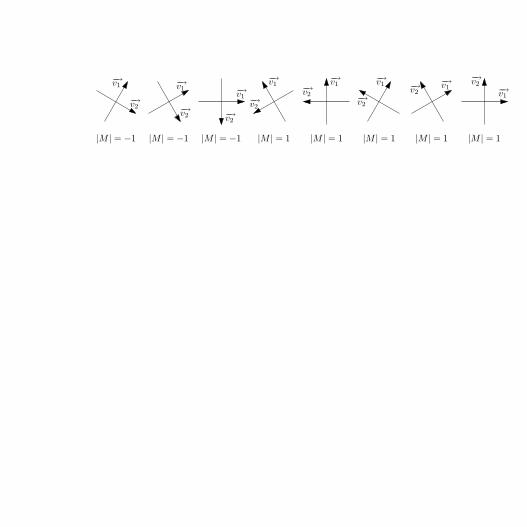
−→v1
−→v2
−→v1−→v2 −→v1
−→v2−→v1
−→v2
−→v1
−→v2
−→v1
−→v2
|M | = 1 |M | = 1|M | = 1|M | = 1|M | = 1|M | = −1|M | = −1|M | = −1
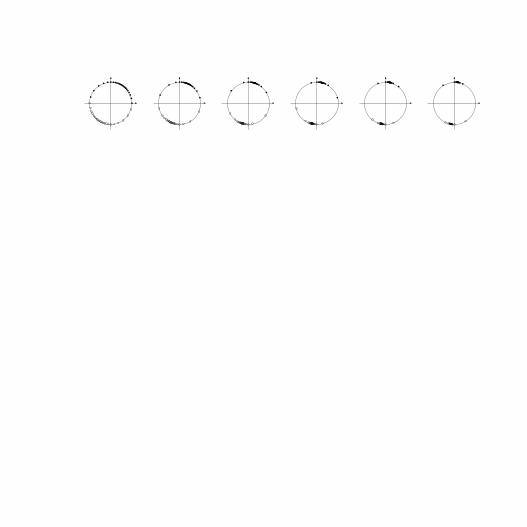
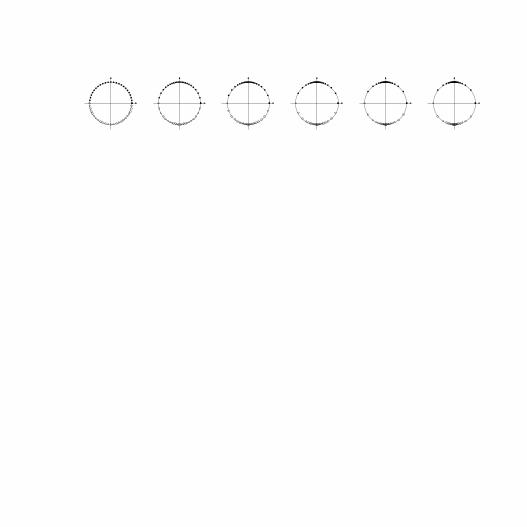
Chapter 2
−ve
+ve +ve
−ve
0 0
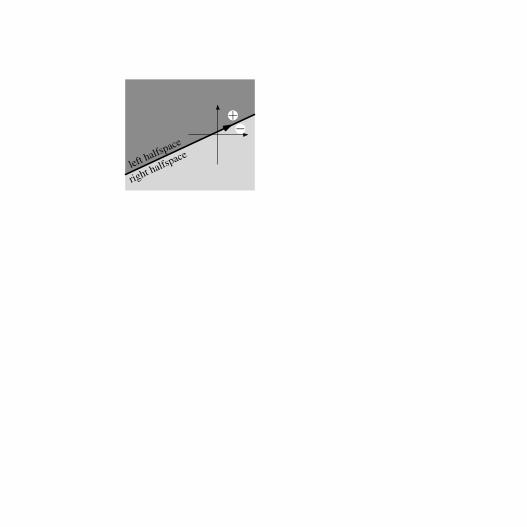
left halfspace
right halfspace
+−
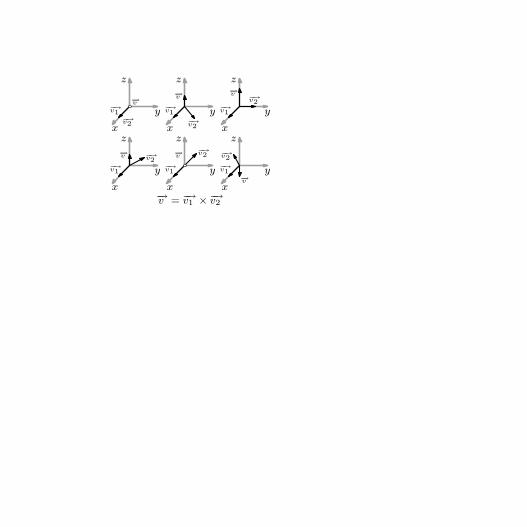
−→v = −→v1 ×−→v2
x
y
z
x
y
z
x
y
z
x
y
z
x
y
z
x
y
z
−→v−→v1
−→v2
−→v−→v1
−→v2
−→v
−→v1
−→v2−→v
−→v1
−→v2−→v−→v1
−→v2
−→v
−→v1−→v2
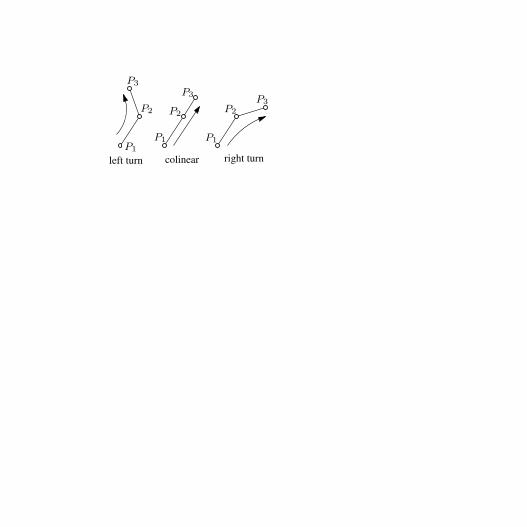
P1 P1
P2 P2
P3P3
left turn colinear right turnP1
P2
P3
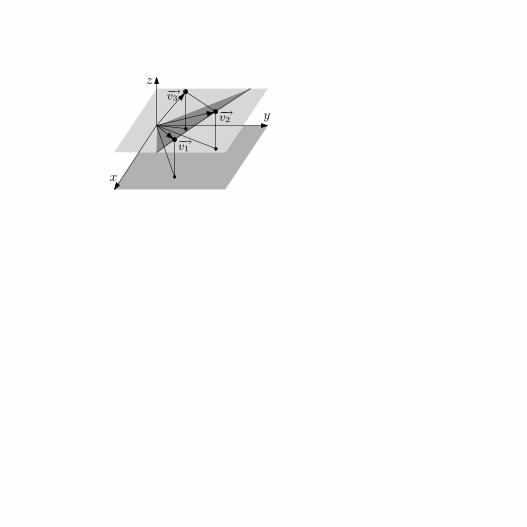
x
y
z−→v3
−→v1
−→v2

p1p2
p3
q
insidecircle
oncircle
boundary
outsidecircle
p1p2
p3
qp1
p2
p3
q
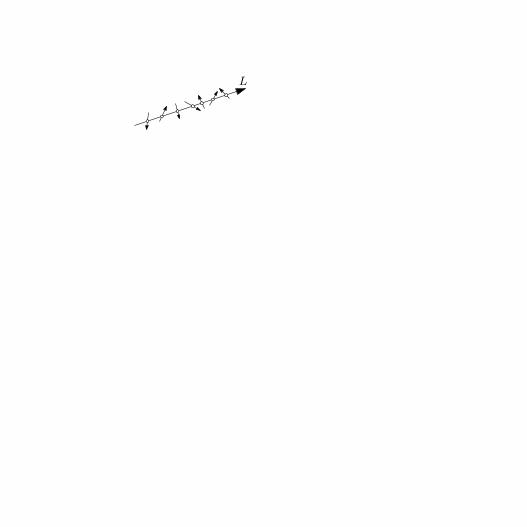
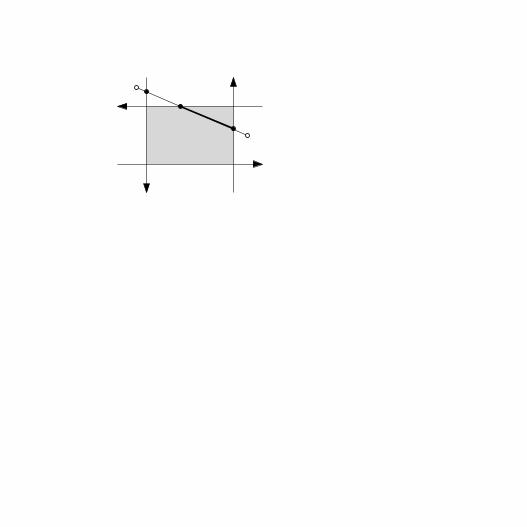
L
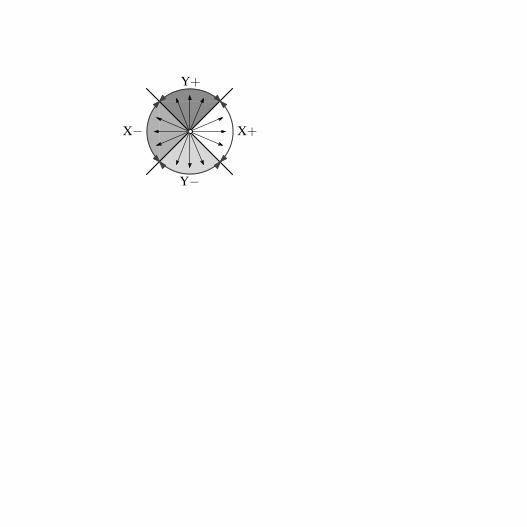
X+
Y+
Y−
X−
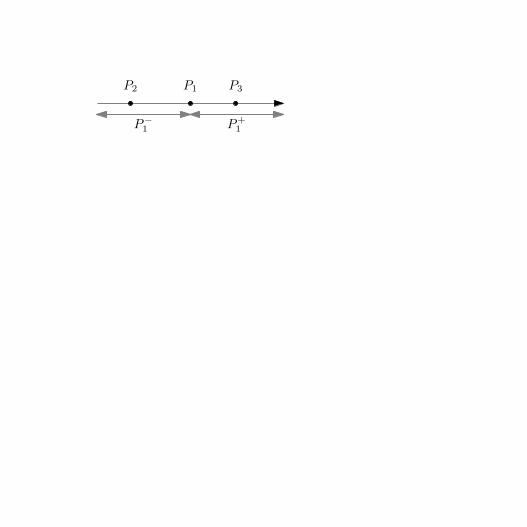
P1P2 P3
P+1P−1

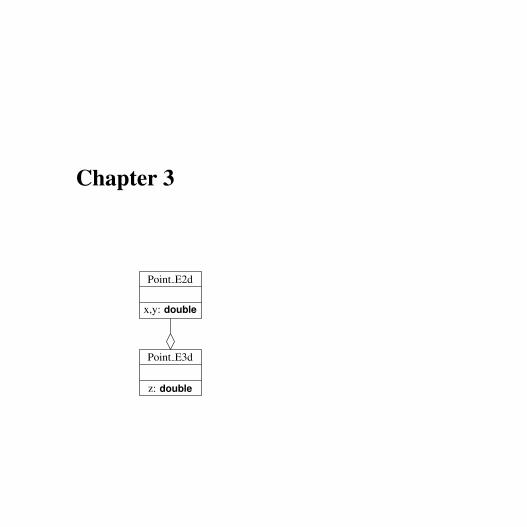
Chapter 3
Point E2d
x,y: double
Point E3d
z: double
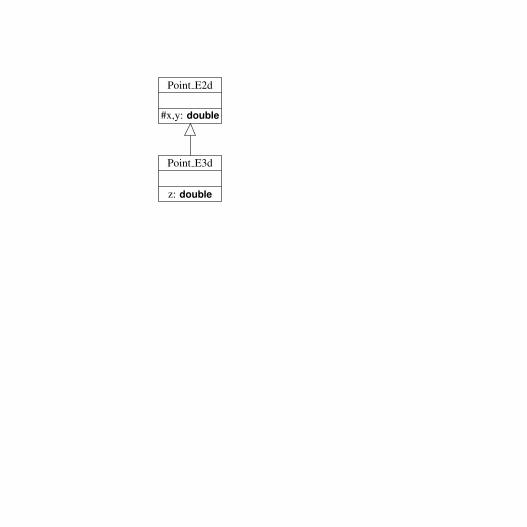
Point E2d
#x,y: double
Point E3d
z: double
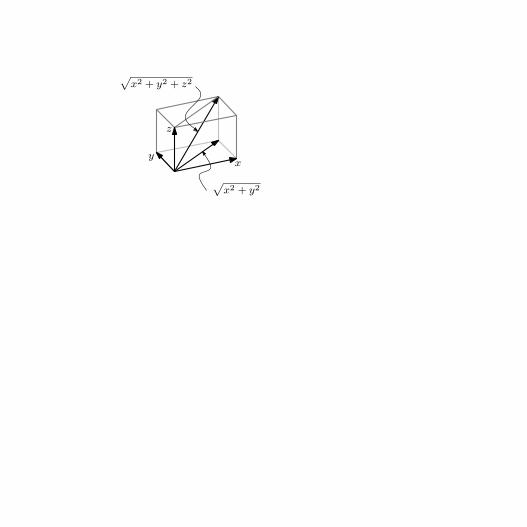
xy
z
px2 + y2
px2 + y2 + z2
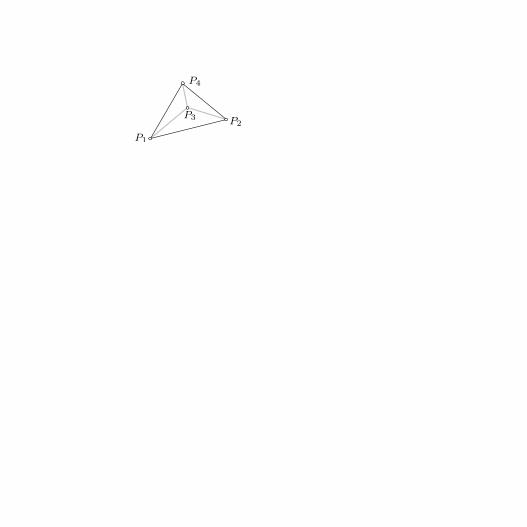
P1
P3
P4
P2
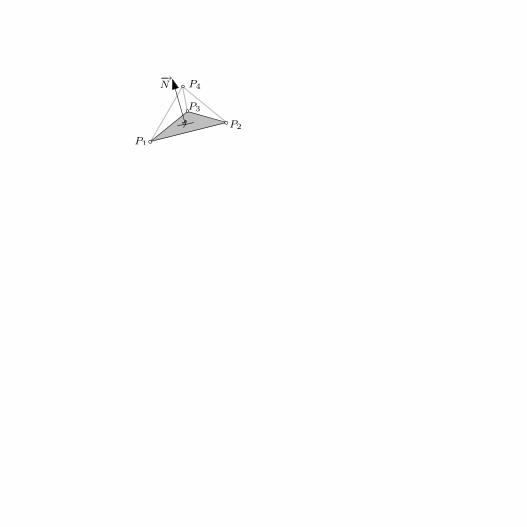
P1
P3
P4
P2
−→N
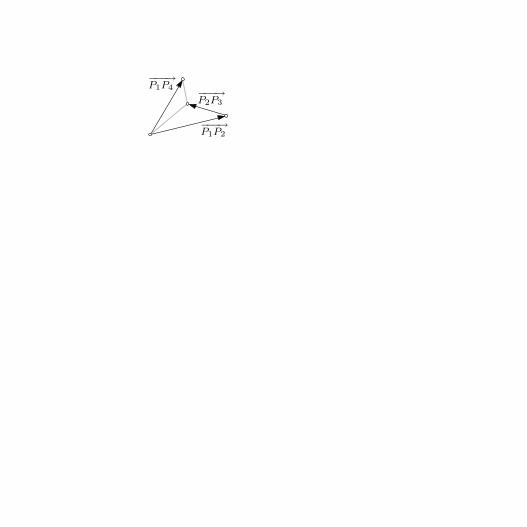
−−−→P1P2
−−−→P2P3
−−−→P1P4
Chapter 4
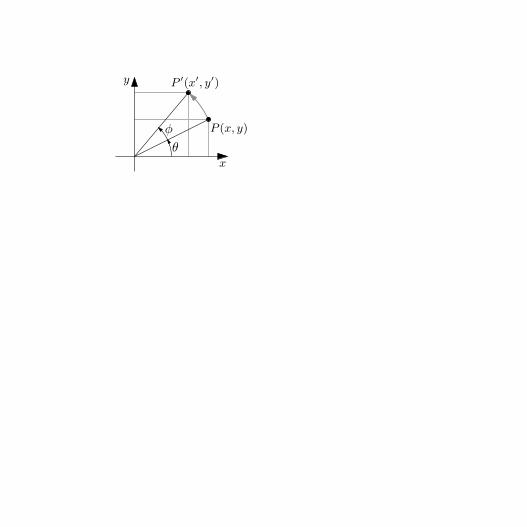
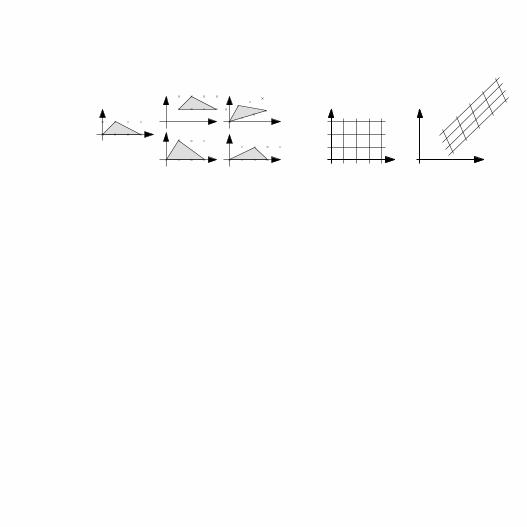
θ
φ
P ′(x′, y′)
P (x, y)
x
y

−→v
T −→v′ = T (−→v ) = −→v
T
PT P ′ = T (P )
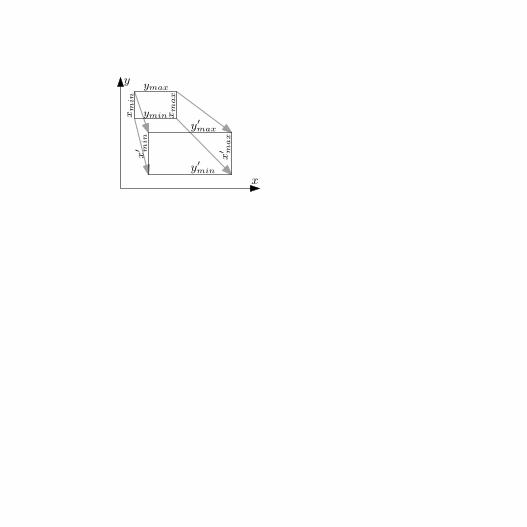
x
y
ymin
ymax
y′min
y′max
xm
in
xm
ax
x′ m
in
x′ m
ax
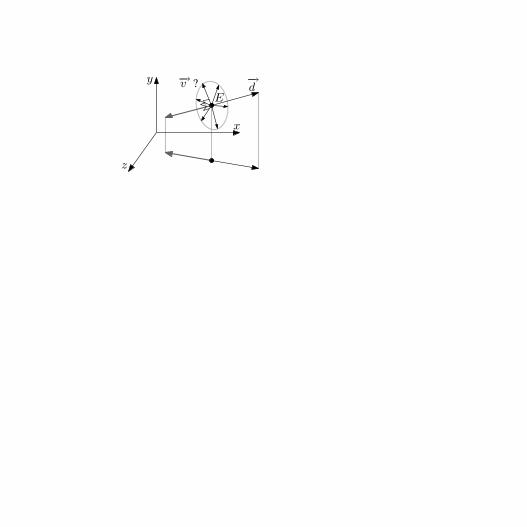
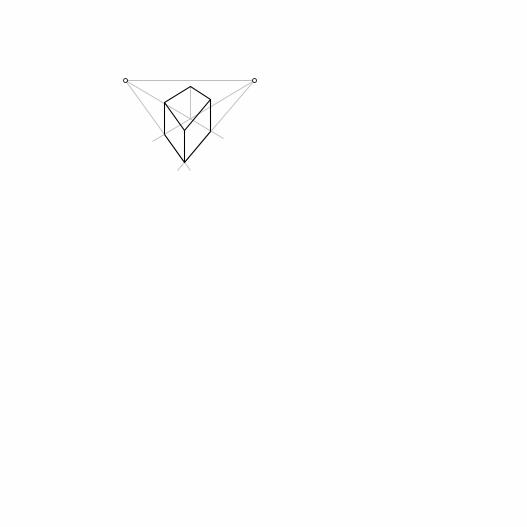
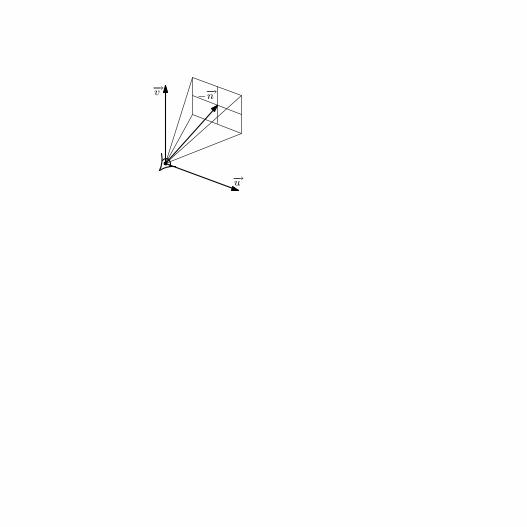
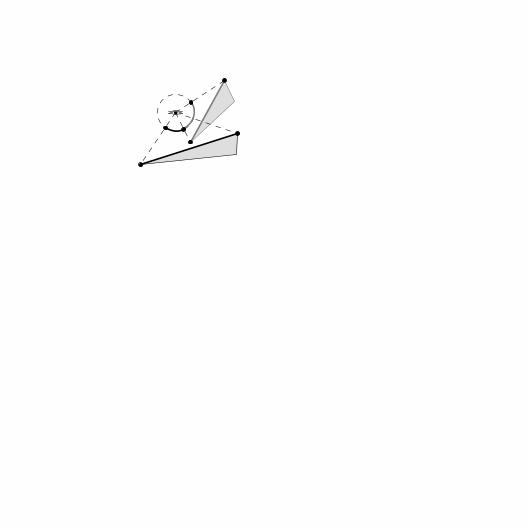
E
−→d
x
y
z
−→v ?
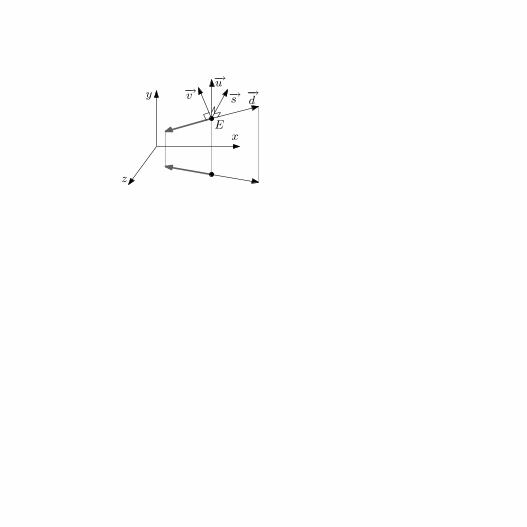
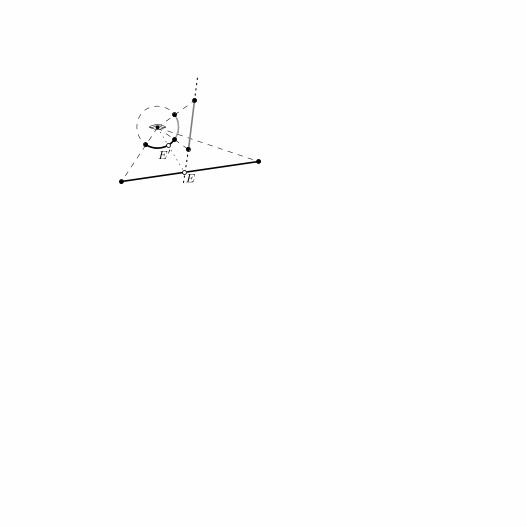
E
−→d
x
y
z
−→v−→u−→s
x
y
z
x
y
z
x
y
z
x
y
z
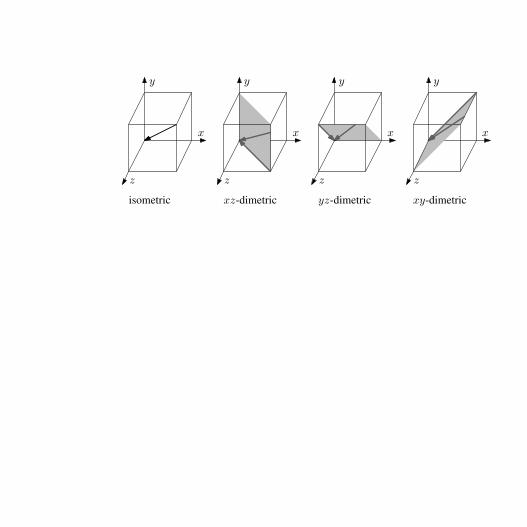
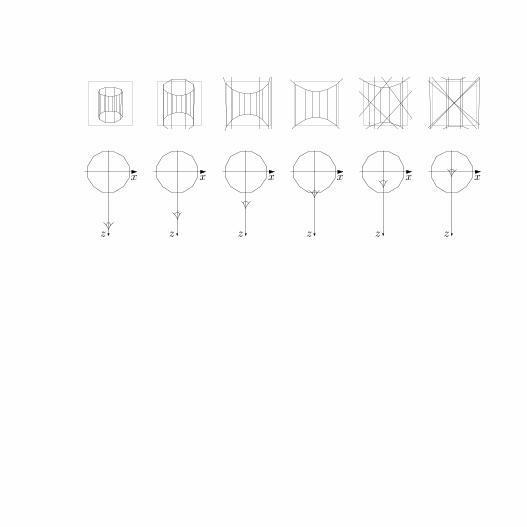
xz-dimetric yz-dimetric xy-dimetricisometric
x
y
z
x
y
z
x
y
z
x
y
z
x
y
z
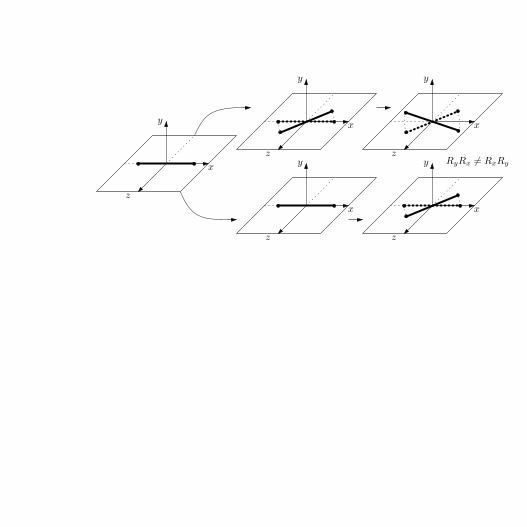
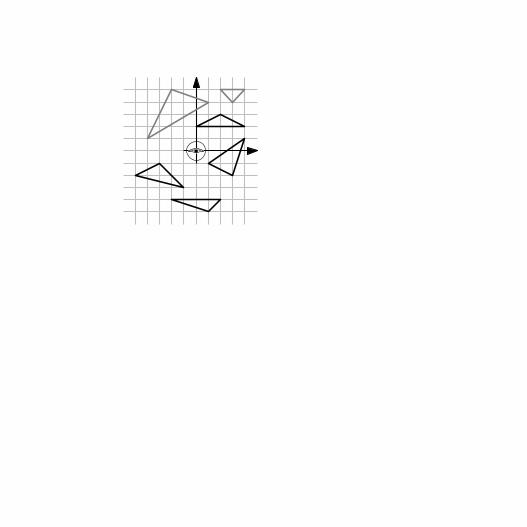
RyRx 6= RxRy
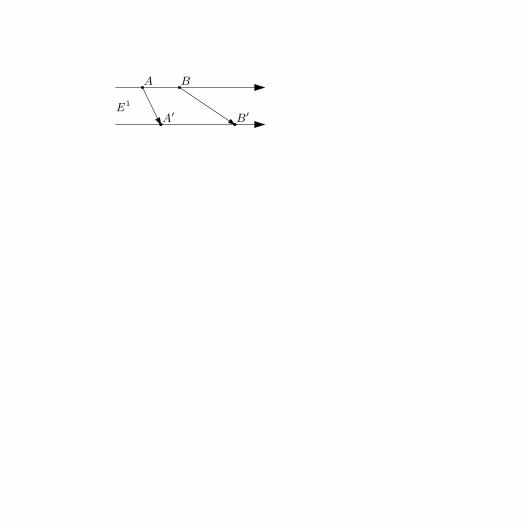
E1
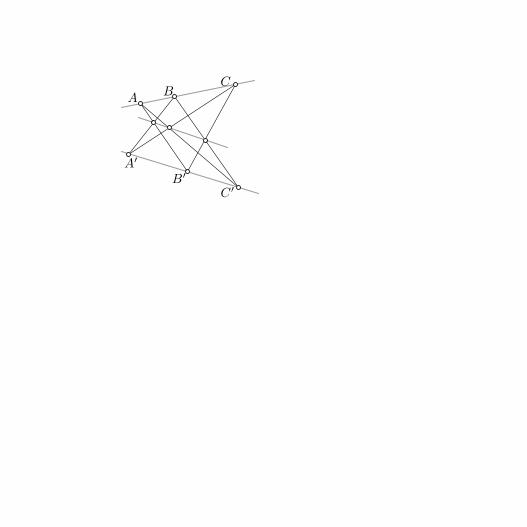
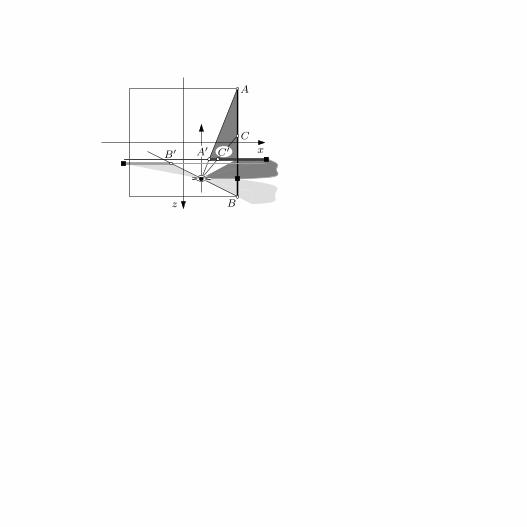
A B
A′ B′
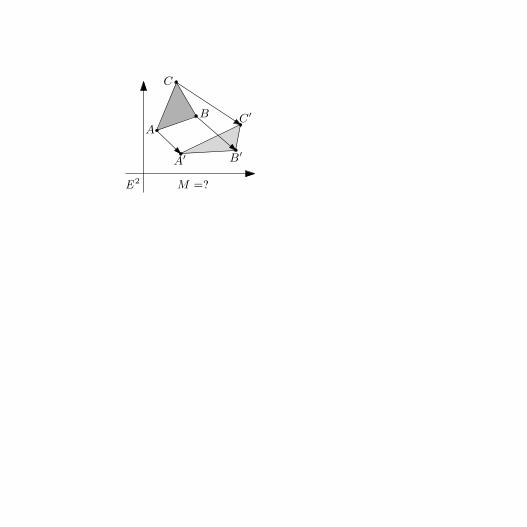
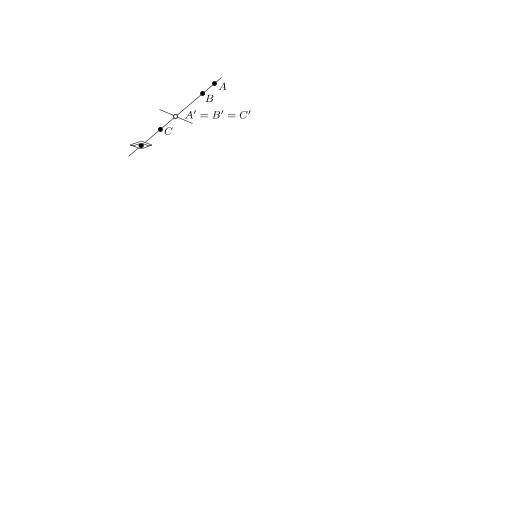
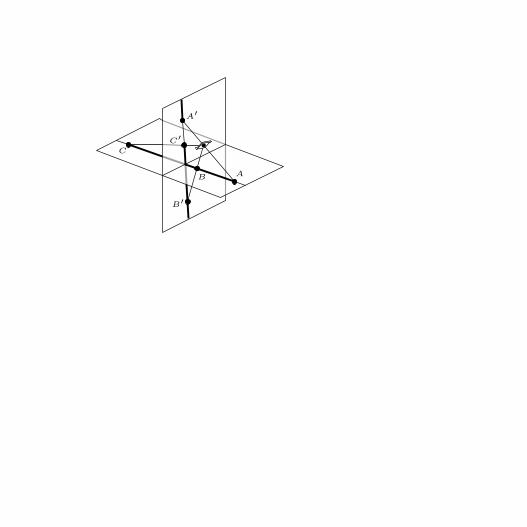
A
B
C
A′ B′
C′
M =?E2

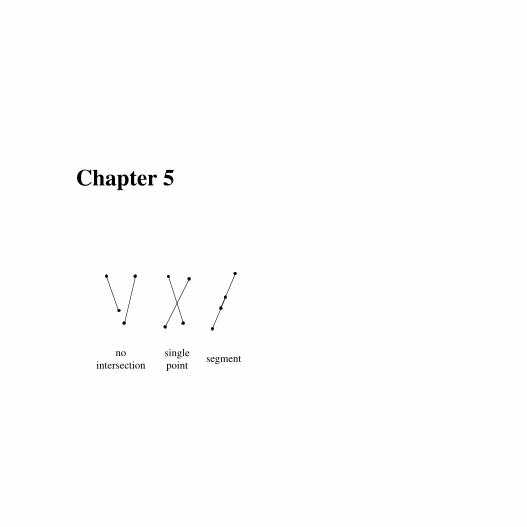
Chapter 5
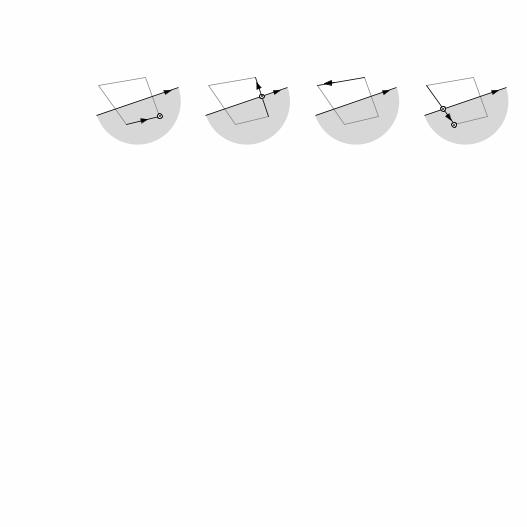
nointersection
singlepoint
segment
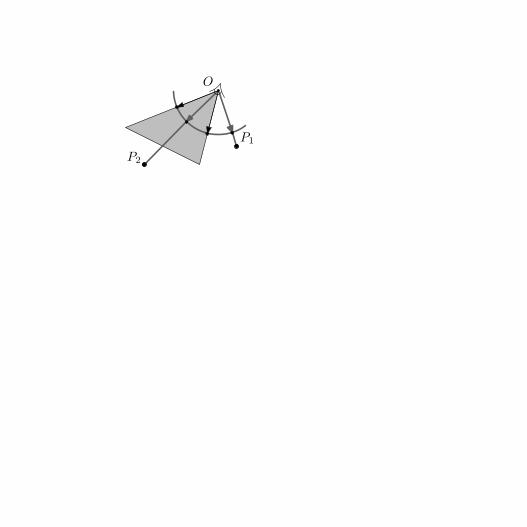
O
P1
P2
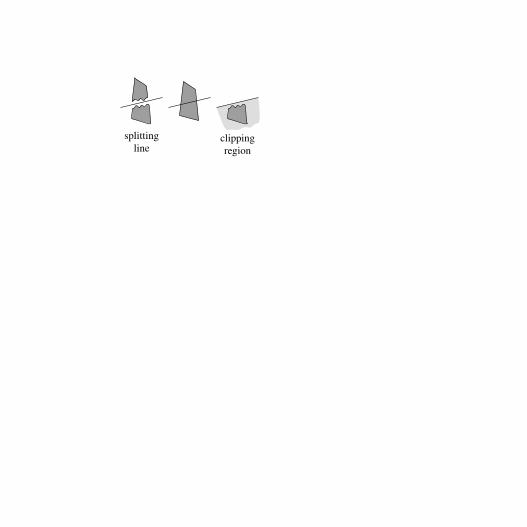
splittingline
clippingregion
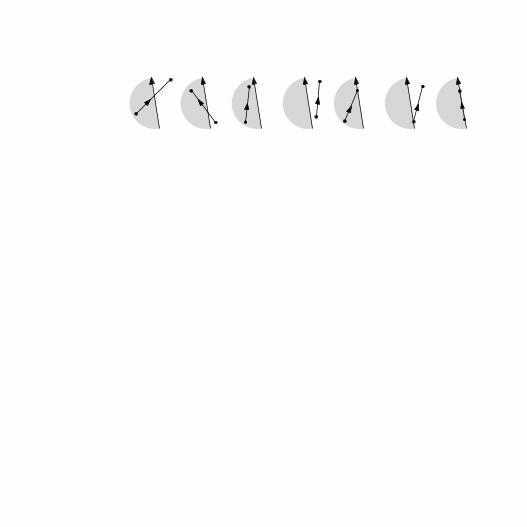
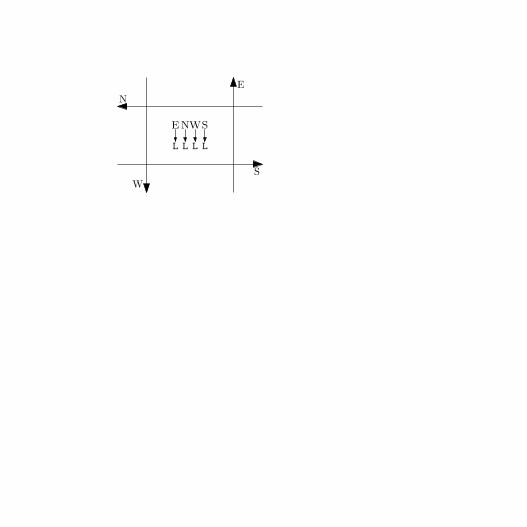
EN
WS
ENWS
L L LL
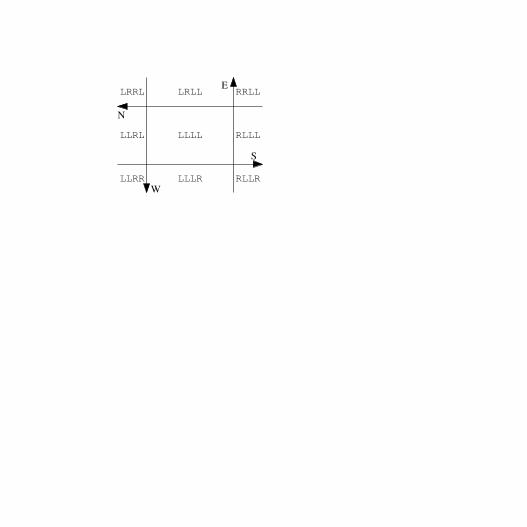
E
N
W
S
LLLL
LRLL
LLLR
RLLL
RRLLLRRL
LLRL
LLRR RLLR

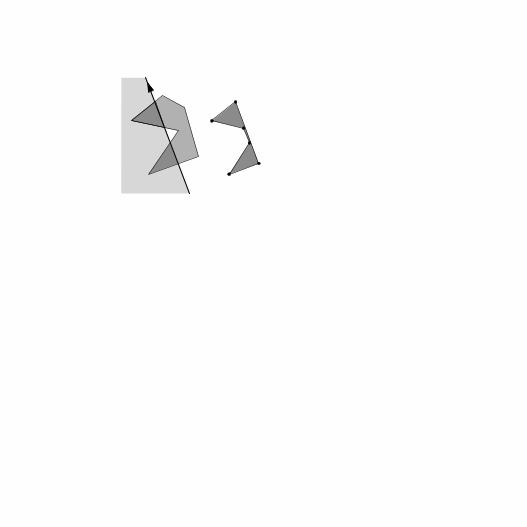
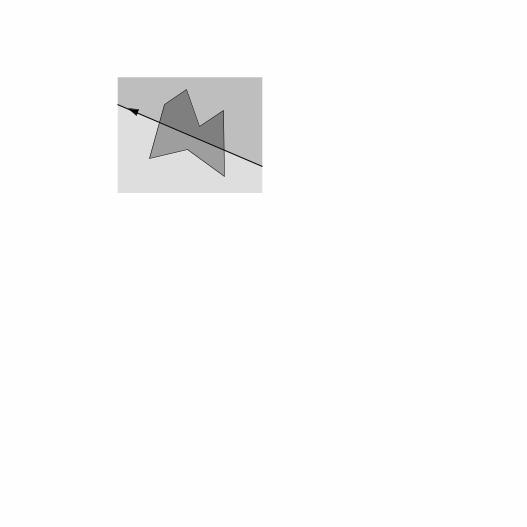

East-HalfspaceClipping
North-HalfspaceClipping
West-HalfspaceClipping
South-HalfspaceClipping
InputPolygon
OutputPolygon

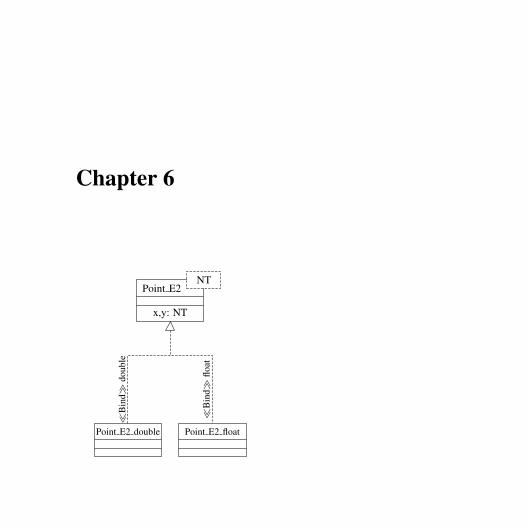
Chapter 6
Point E2
�B
ind�
doub
le
Point E2 double Point E2 float
NT
x,y: NT
�B
ind�
float
+×
3 42
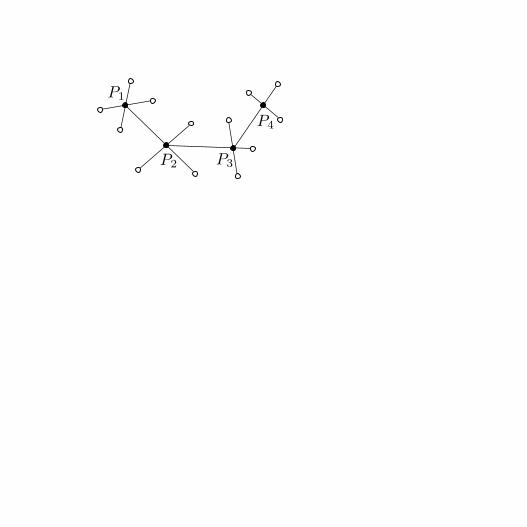
P1
P2 P3
P4
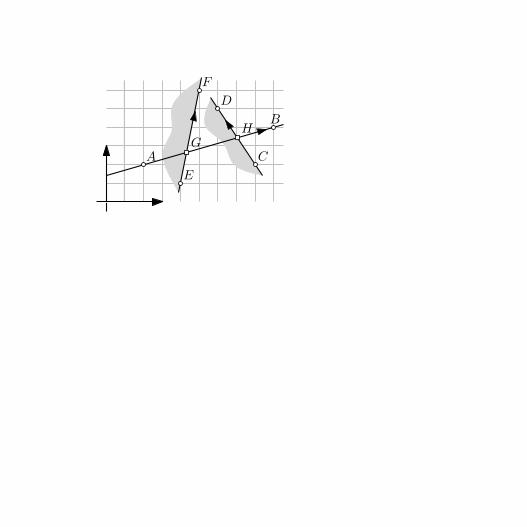
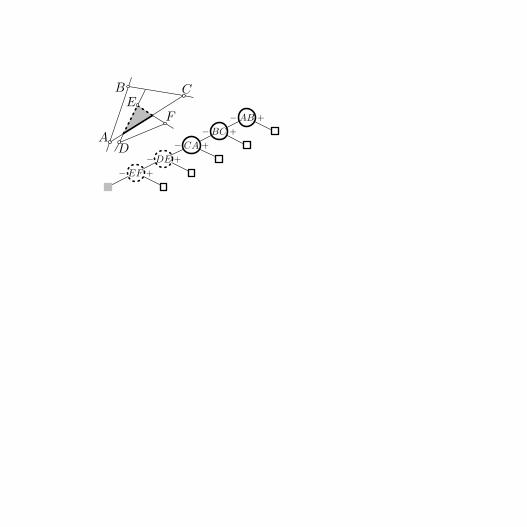
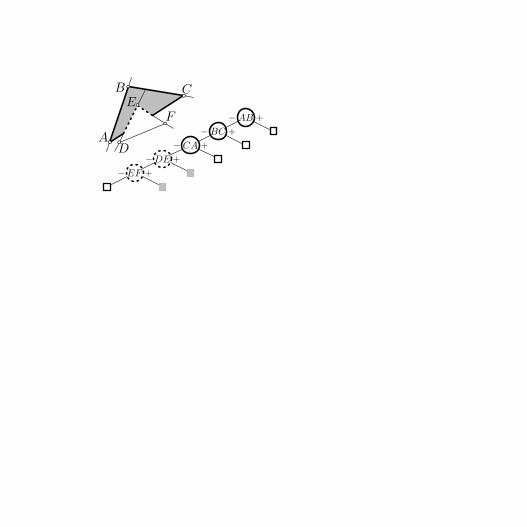
A
B
C
D
E
GH
F

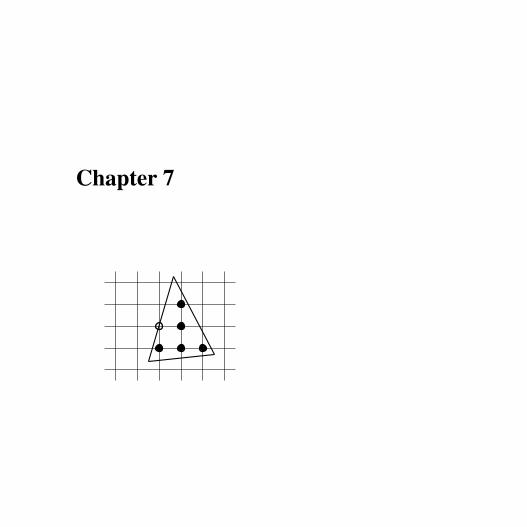
Chapter 7
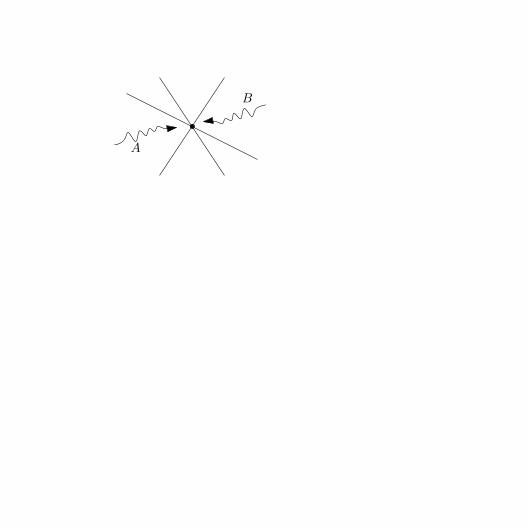
A
B
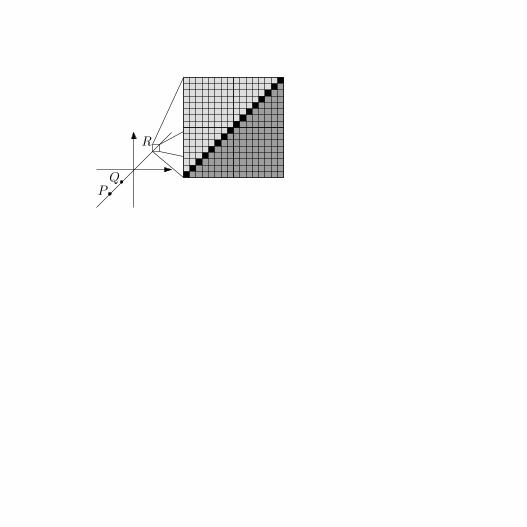
PQ
R
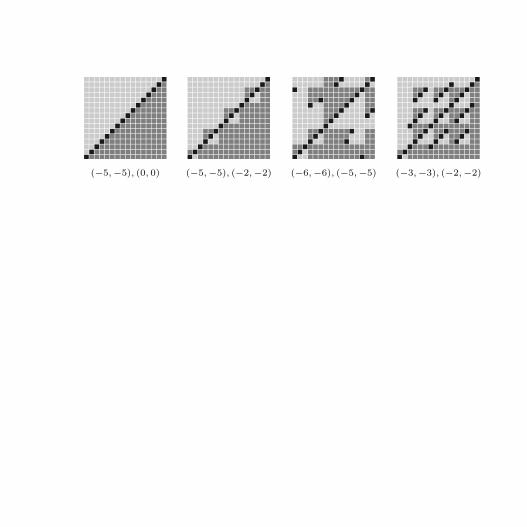
(−5,−5), (0, 0) (−5,−5), (−2,−2) (−6,−6), (−5,−5) (−3,−3), (−2,−2)
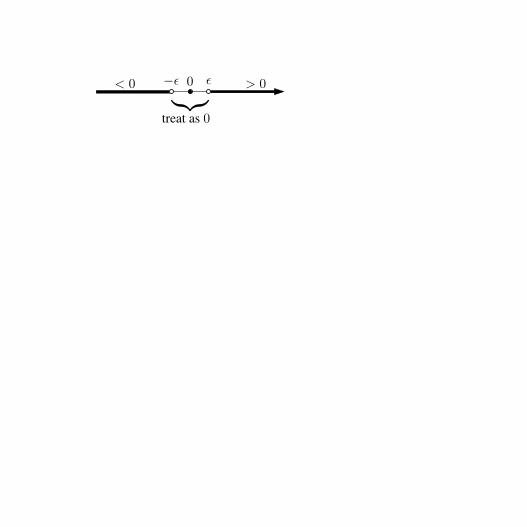
0−ε ε︸︷︷︸treat as 0
> 0< 0

Chapter 8
P−→d

P
Q
R
S
T
P+
P−
antipode of P
P ′
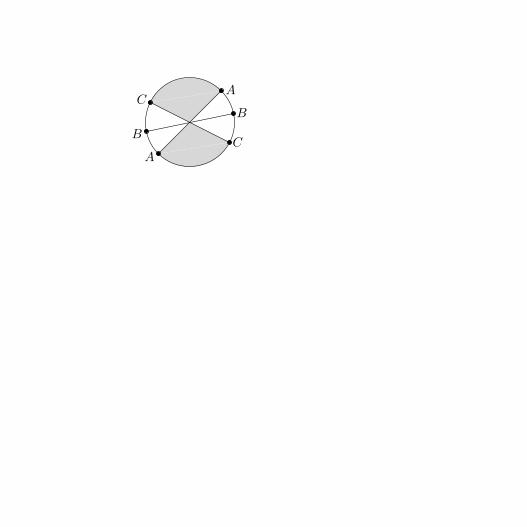
AB
C
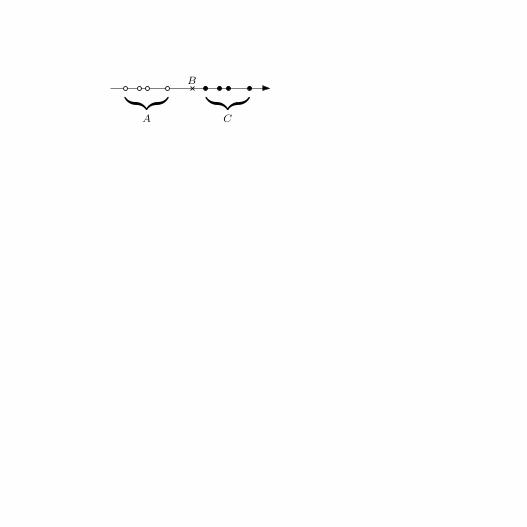
A ≤ B
B ≤ CC ≤ A
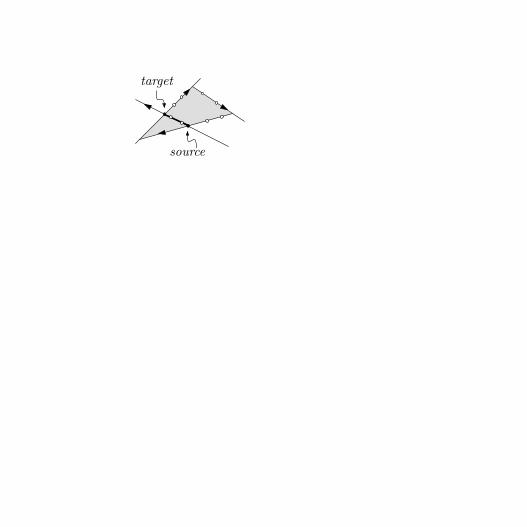
P
Ssource
Starget
s2s1
s2s1s2
s1
s2
s1

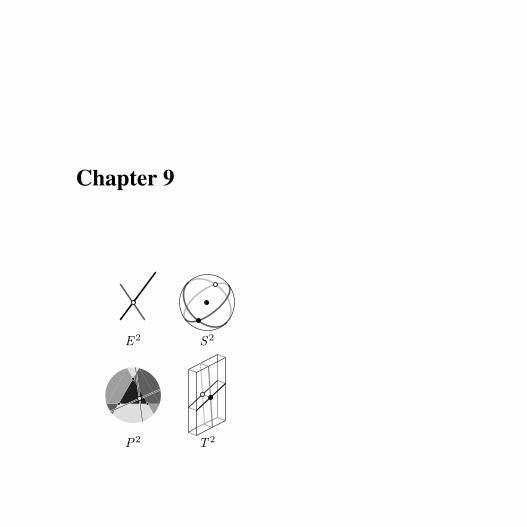
Chapter 9
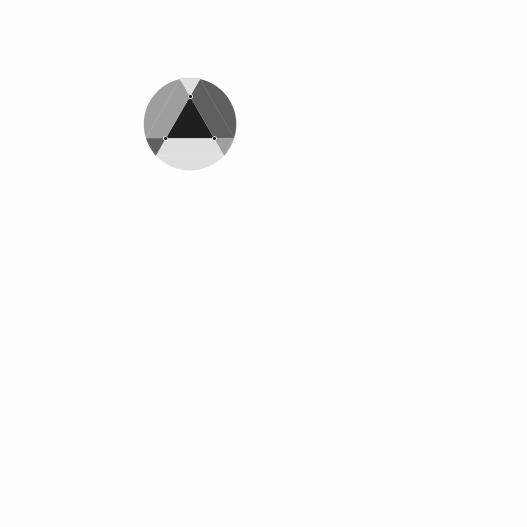
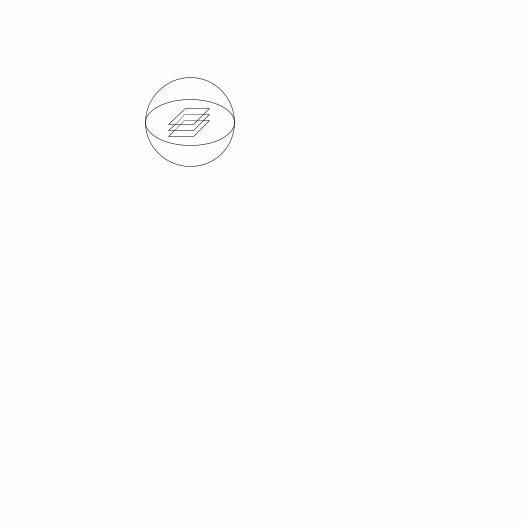
E 2 S 2
P2 T 2
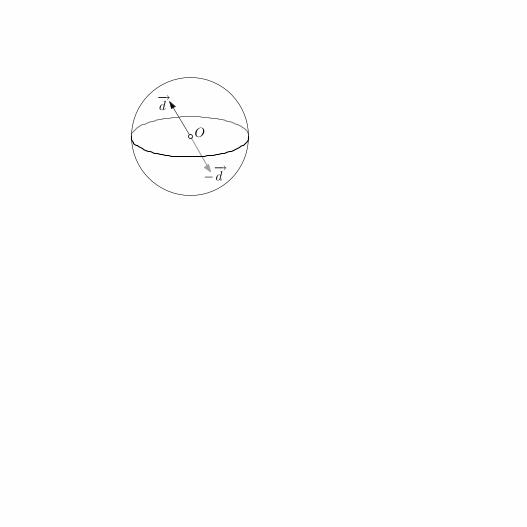
O
−→d
−−→d
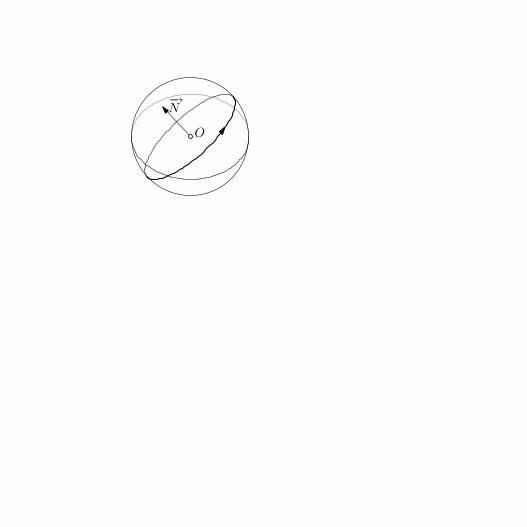
−→N
O
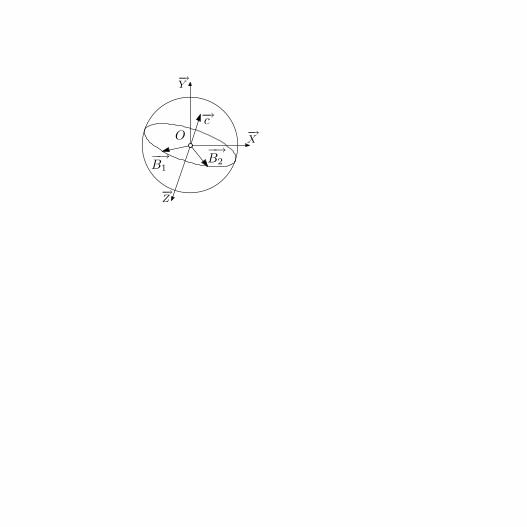
−→Y
−→X
−→Z
O
−→c
−→B1
−→B2
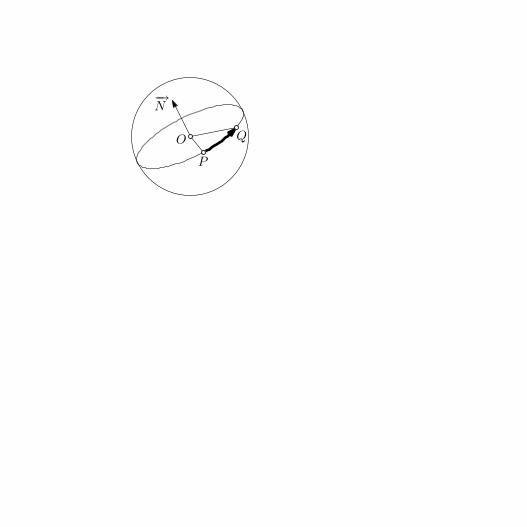
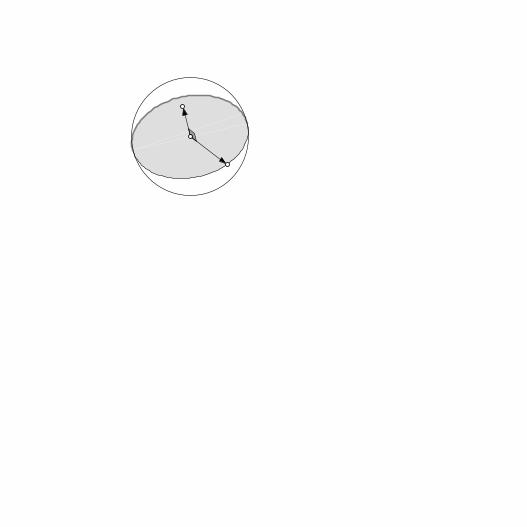
O
P
Q
−→N

−→N
O
P
Q
−→M
O
P
Q
(P, Q,−→M ) (P, Q,
−→N )
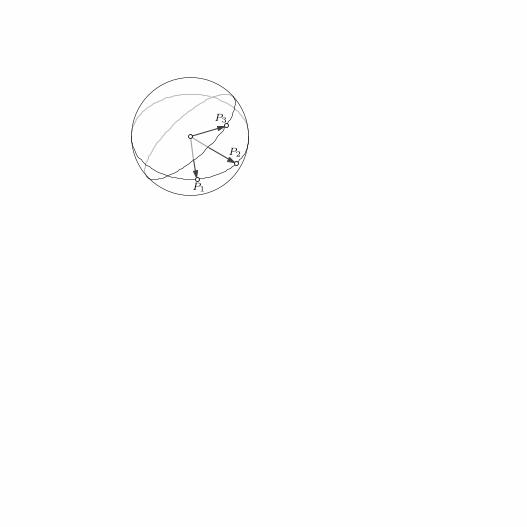
P1
P2
P3
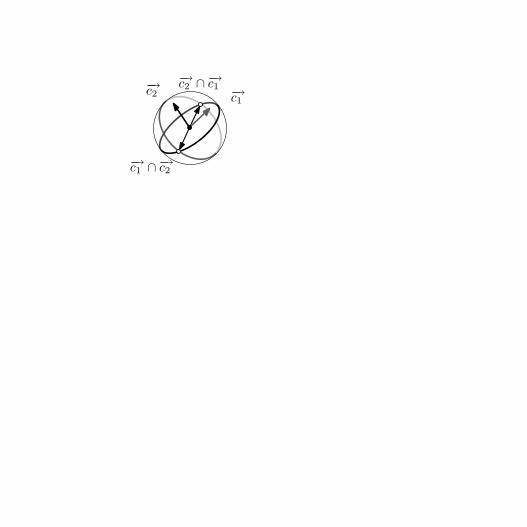
−→c1
−→c2
−→c1 ∩ −→c2
−→c2 ∩ −→c1


Chapter 10

Chapter 11
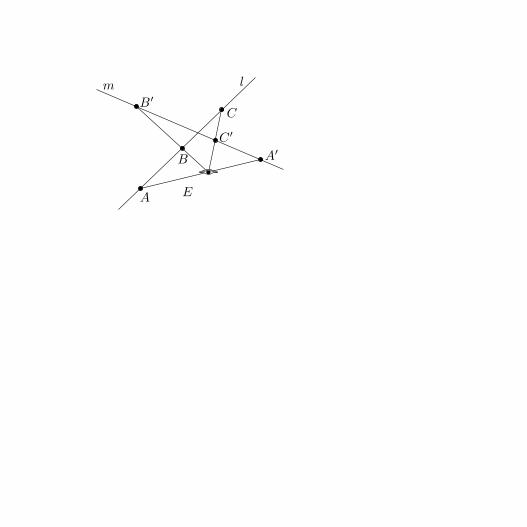
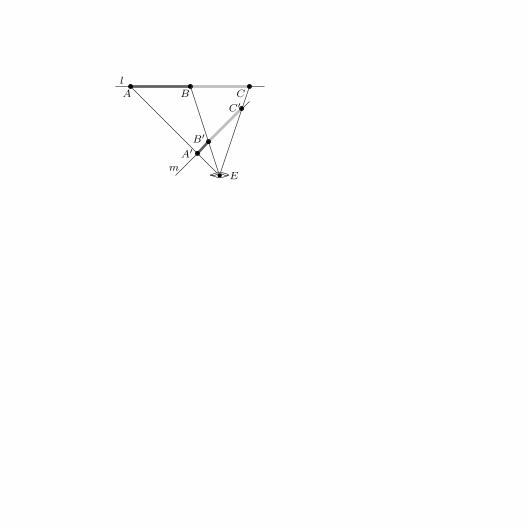
l
m
E
A
A′
B
B′
C
C′
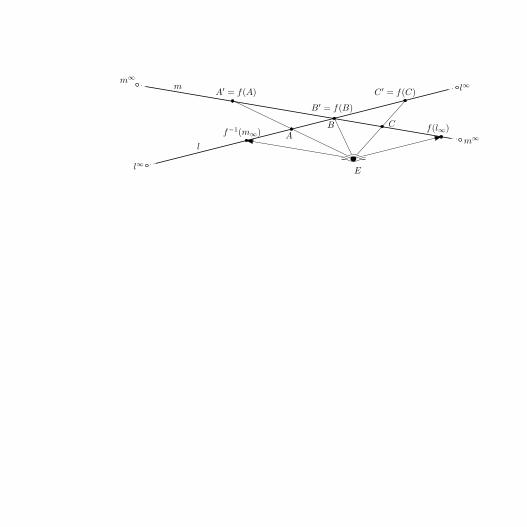
AB C
B′ = f(B)
A′ = f(A) C ′ = f(C)m∞
E
l
f(l∞)f−1(m∞)m∞
l∞m
l∞
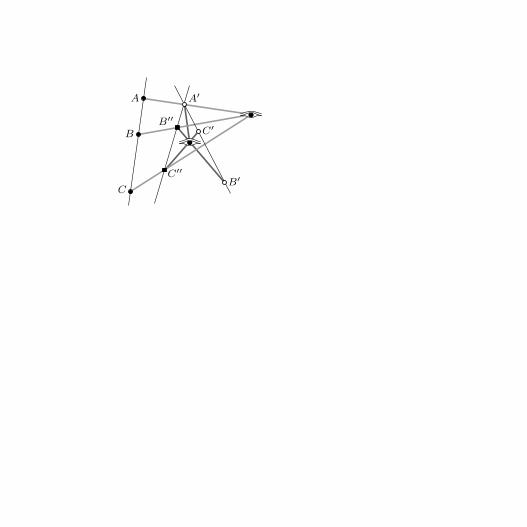
A
B
C
A′
B′
C′B′′
C′′
AB
C
A′ = B′ = C′
B︸︷︷︸ ︸︷︷︸CA
lm
A
B
C
A′
B′
C ′
E
l
m
A B C
A′B′
C′
E
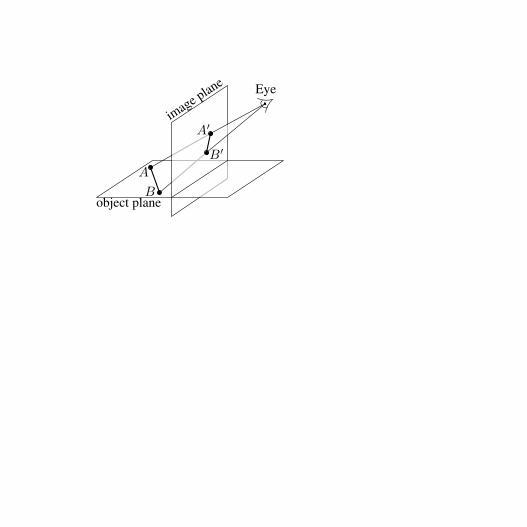
A
B
A′
B′
image plane Eye
object plane
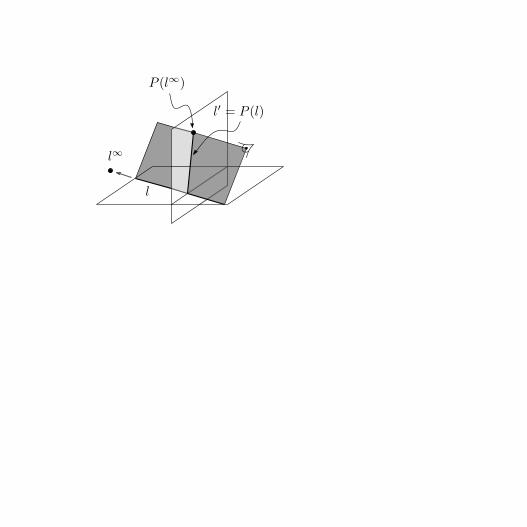
l∞
P (l∞)
l
l′ = P (l)
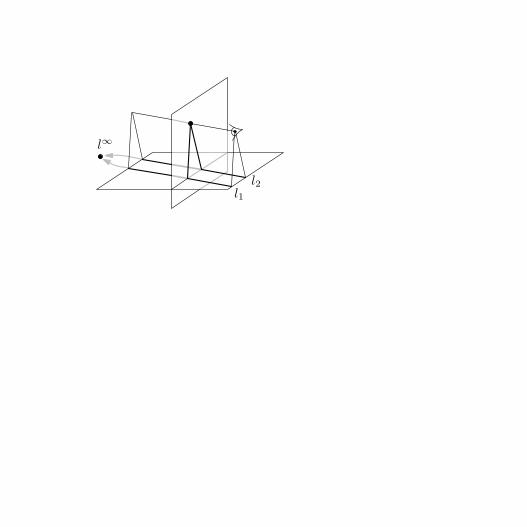
l∞
l1l2
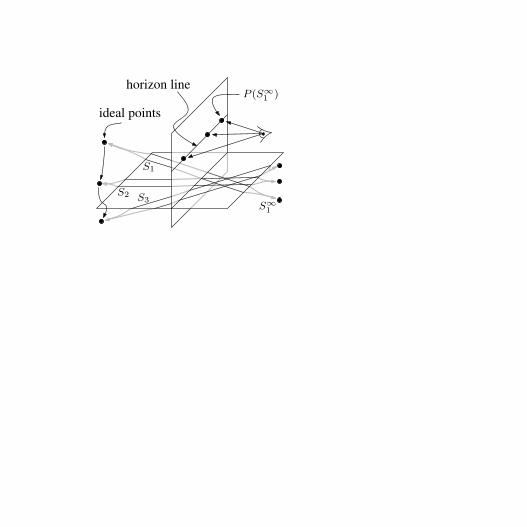
horizon line
ideal pointsP (S∞1 )
S∞1
S1
S2 S3
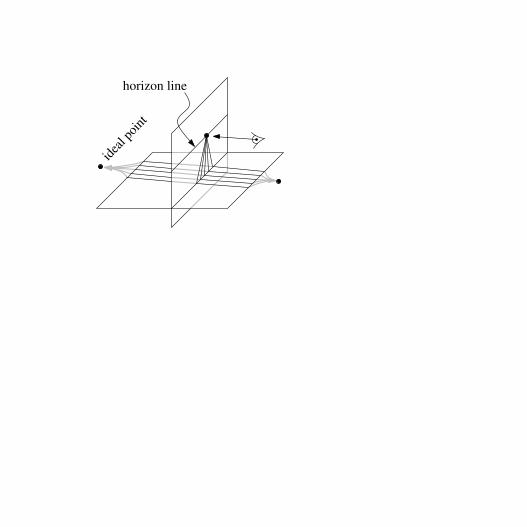
horizon lineide
alpo
int
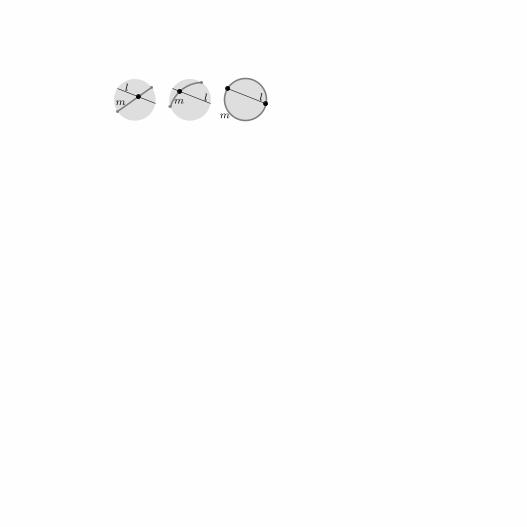
l
m lm l
m
A
B
C
C
B
A
AB
C
A′
B′
C′

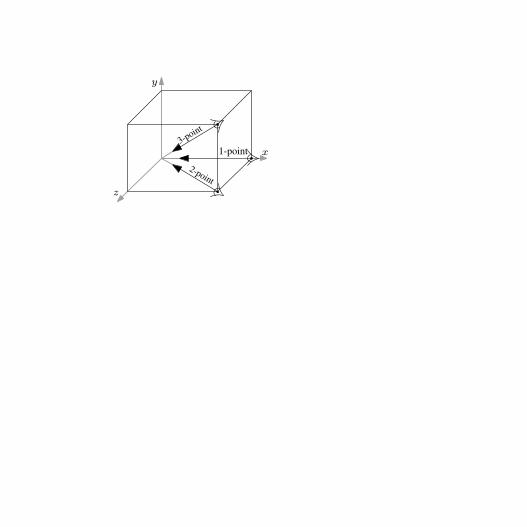
1-point
y
x
z
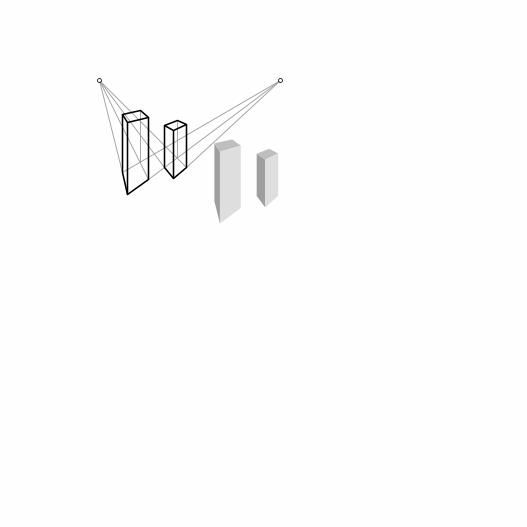
2-point
3-point
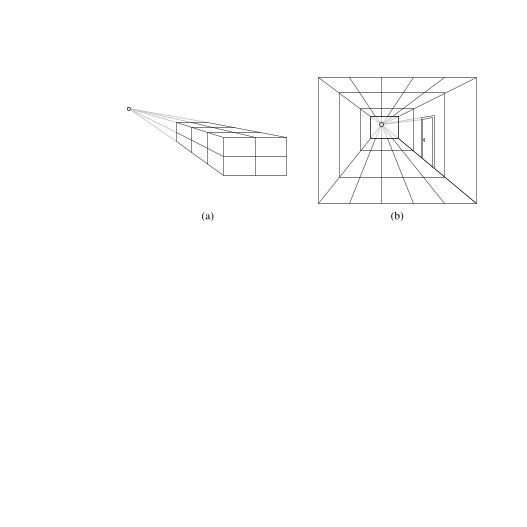
(b)(a)


AA′
BB′
C
C ′
O
A
A′
C ′
BC
B′
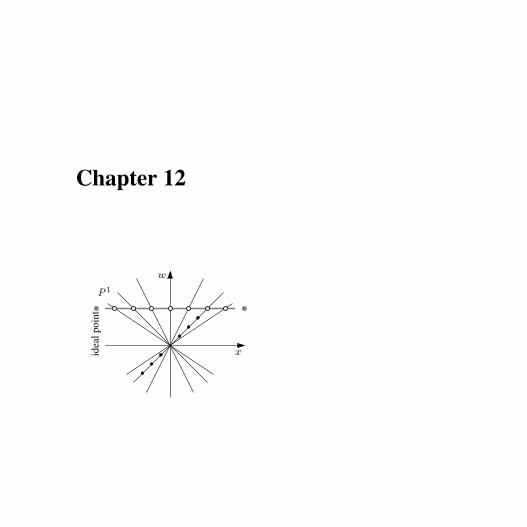
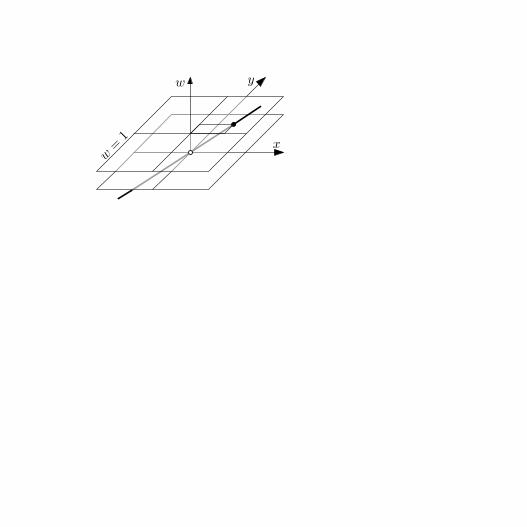
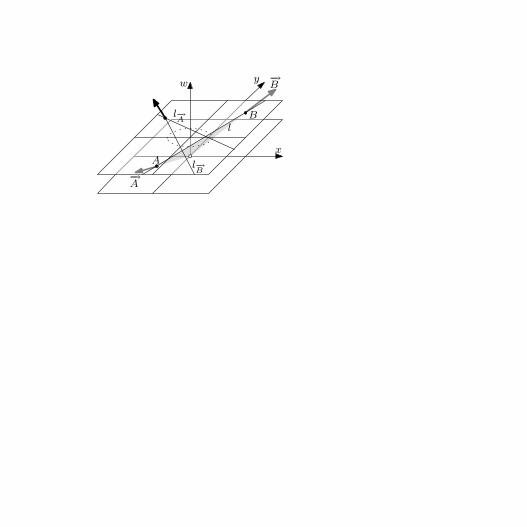
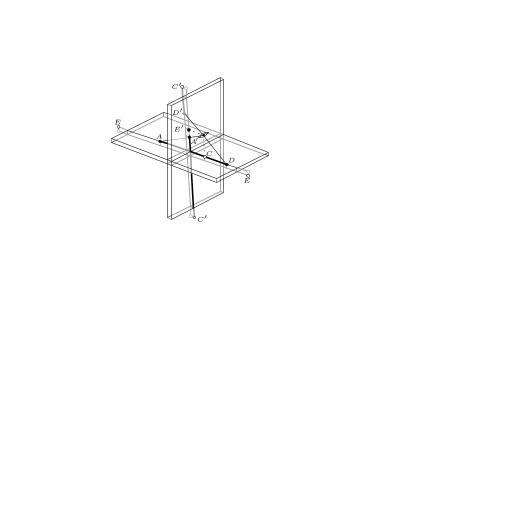
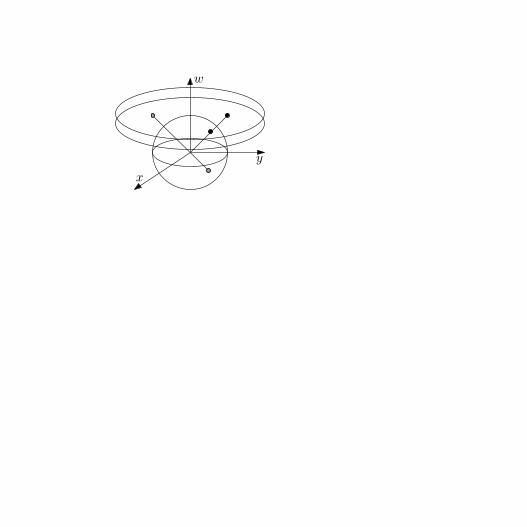
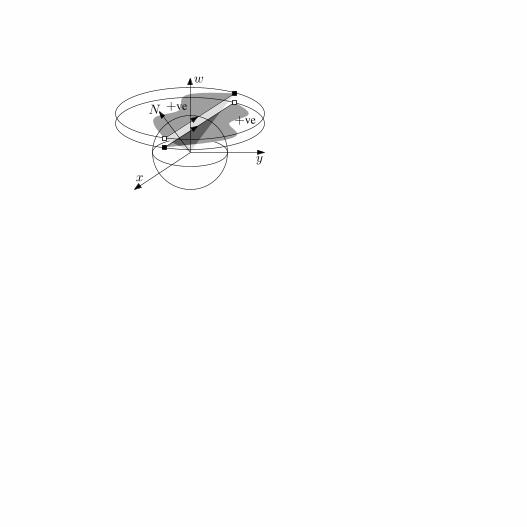
Chapter 12
x
w
idea
lpoi
nt
P1
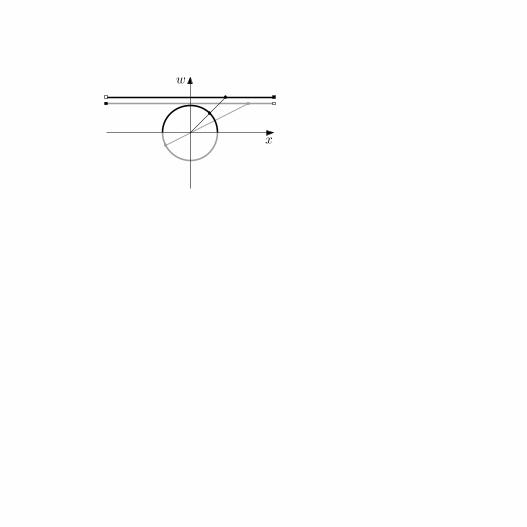
x
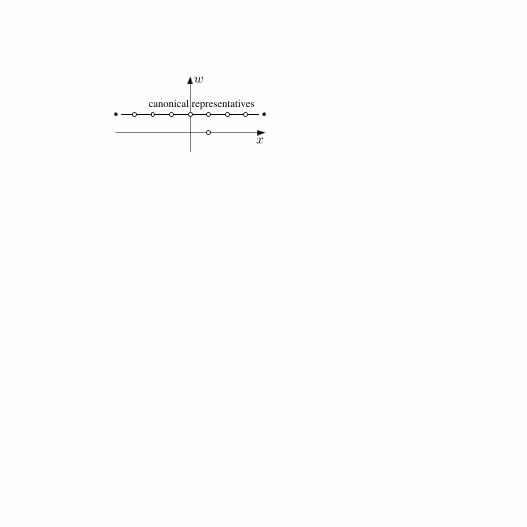
w
canonical representatives
x
w
x
w
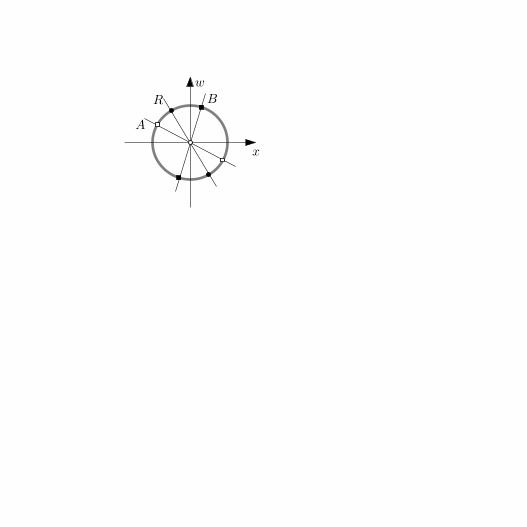
A
BR
x
yww
=1
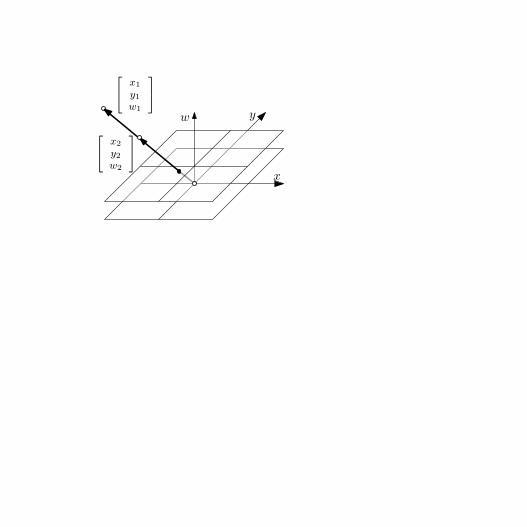
x
yw
24 x1
y1
w1
3524 x2
y2
w2
35
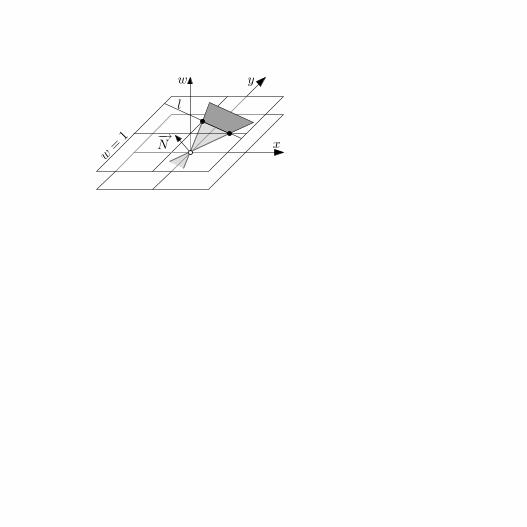
w
l
x
y
w=
1 −→N
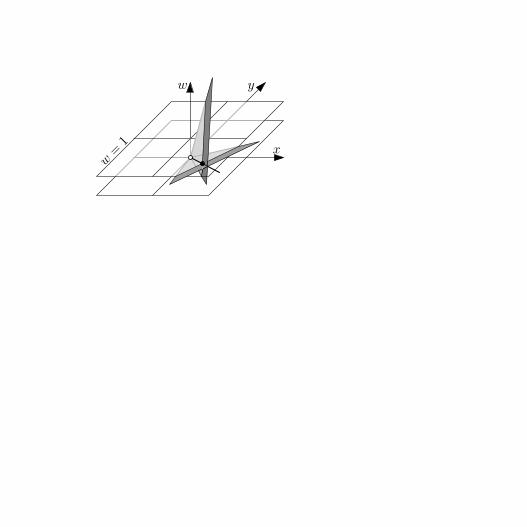
w
x
yw
=1
x
yw
A
Bl
−→A
−→B
l−→B
l−→A
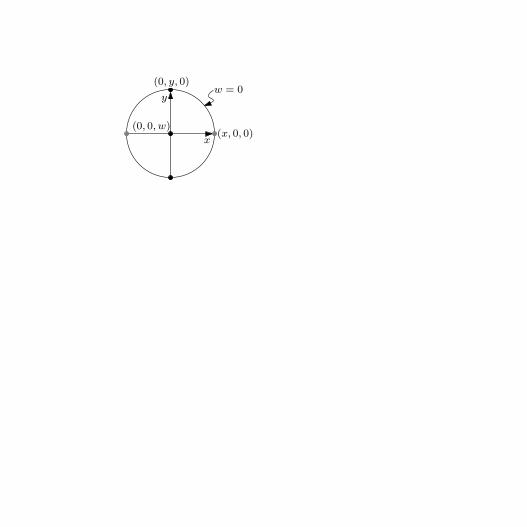
x
y
(0, y, 0)
(x, 0, 0)(0, 0, w)
w = 0
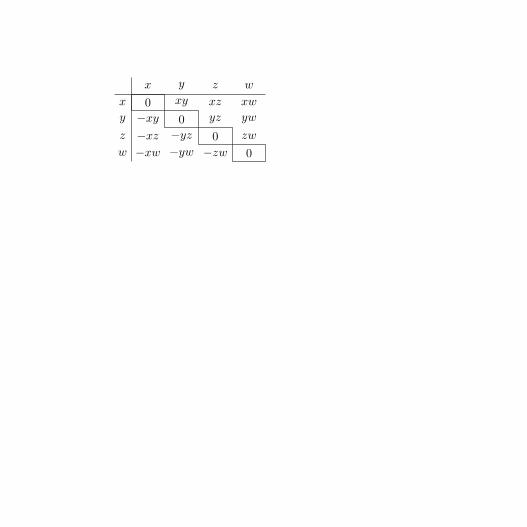
x y z w
0 xy xz xw
−xy 00
0−xz
−xw
−yz
x
y
z
w
yz yw
zw
−yw −zw

x
y
z (x, 0, 0, 0)
(0, y, 0, 0)
(0, 0, z, 0)
(0, 0, 0, w)
w = 0

(wx, w/k)
(wx, w)(x, 1)(kwx, w)
(kx, 1)

(wx, w)(x, 1)(wx + wt, w)
(x + t, 1)
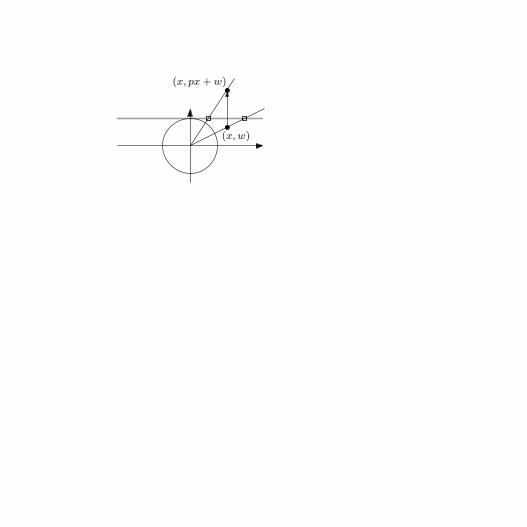
(x, w)
(x, px + w)

slope = p
slope = −p
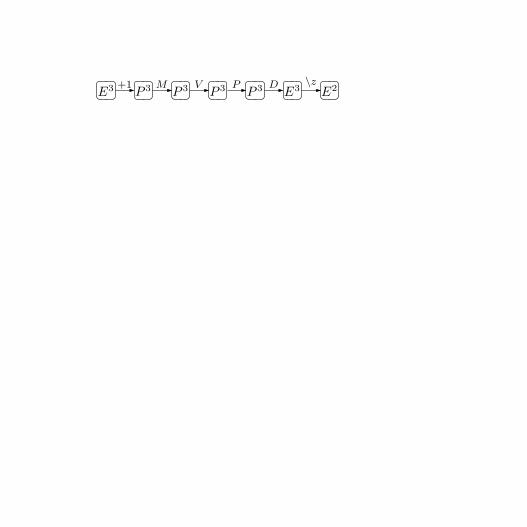
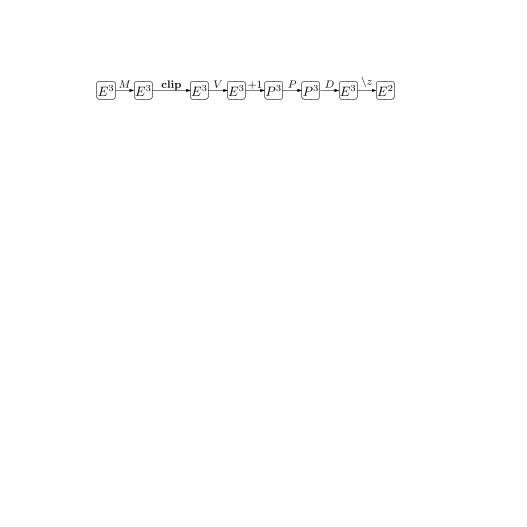
E3 P 3 P 3 P 3 P 3 E3 E2M V P D+1 \z
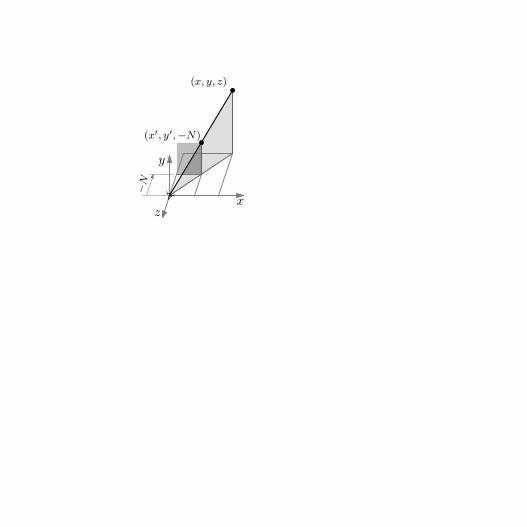
x
y
z
(x, y, z)
(x′, y′,−N)−
N
x
y
z
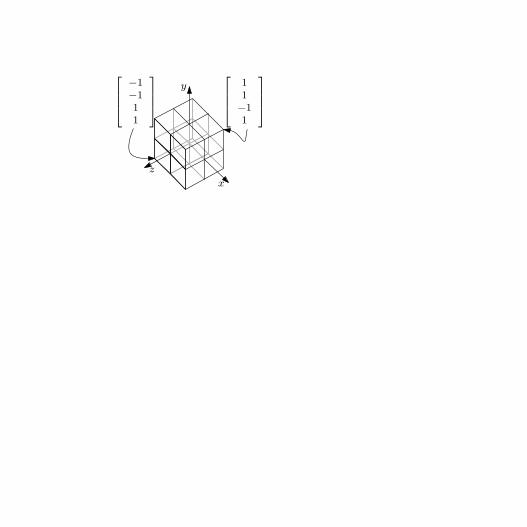
2664−1−111
37752664
11−11
3775
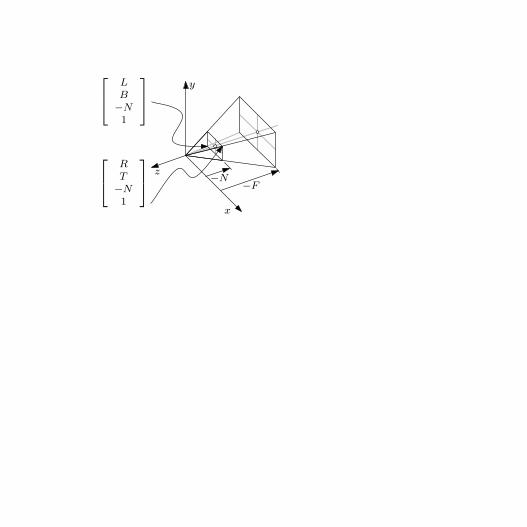
LB−N1
R
T−N1
x
y
z −N−F
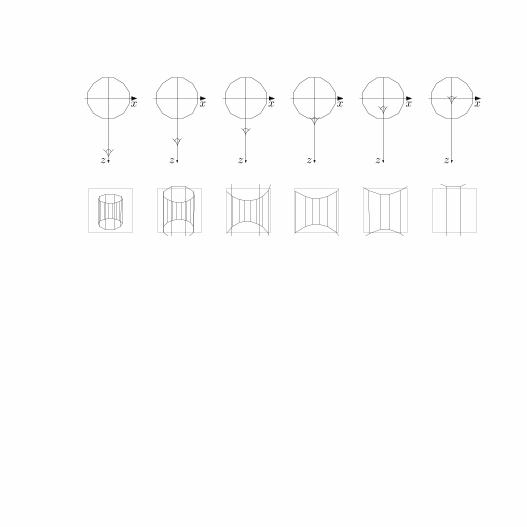
x
z
x
z
x
z
x
z
x
z
x
z
y
x
z
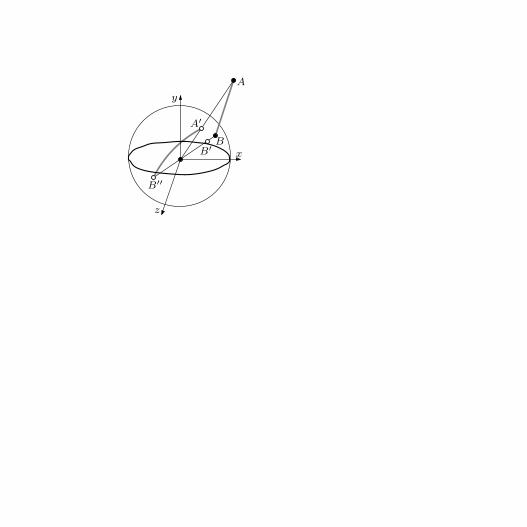
A
B
A′
B′
B′′
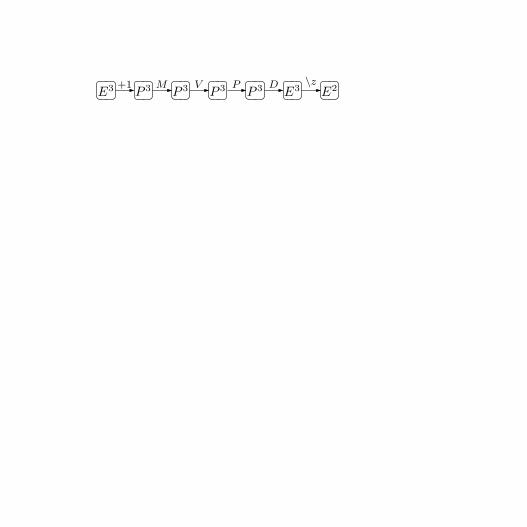
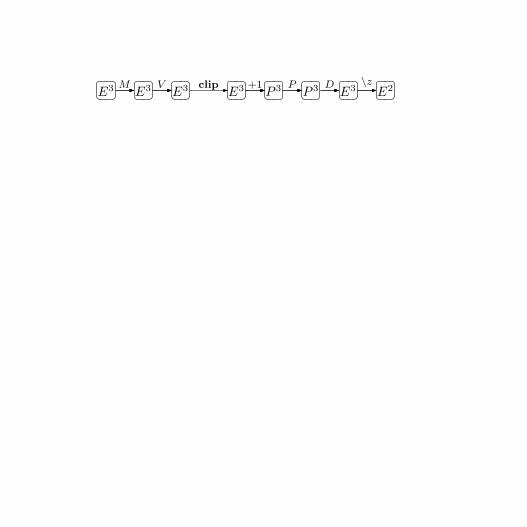
E3 P 3 P 3 P 3 P 3 E3 E2M V P D+1 \z
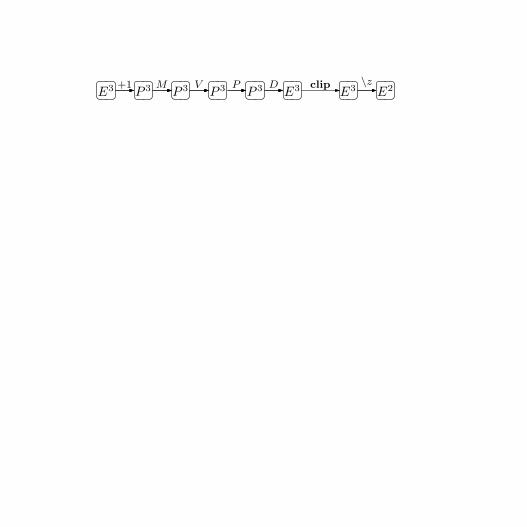
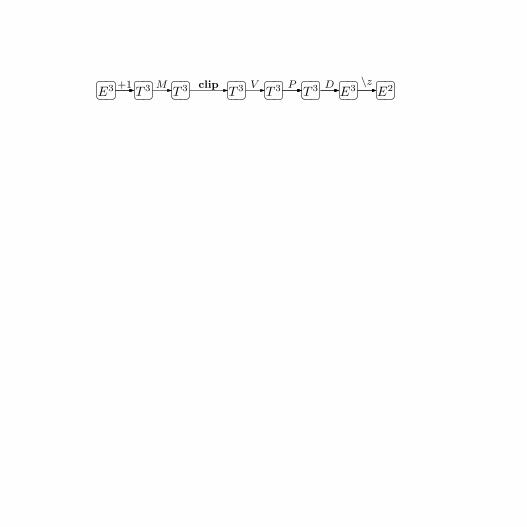
E3 P 3 P 3 P 3 P 3 E3 E2M V P D clip \zE3+1
E3 P 3 P 3 E3 E2M P D \z+1E3 E3Vclip
E3
E3 P 3 P 3 E3 E2M V P Dclip \zE3 +1
E3 E3
AB C
A′
B′ C′
O

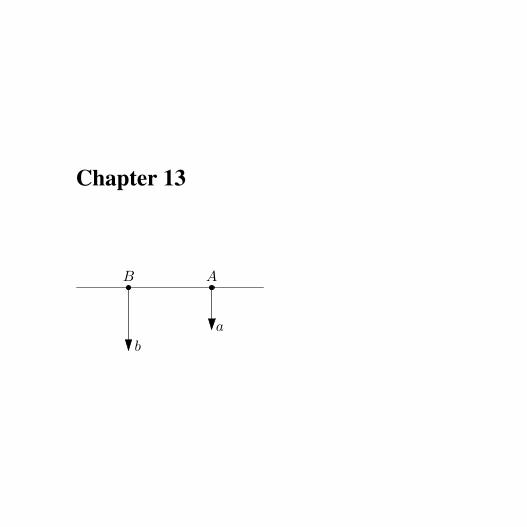
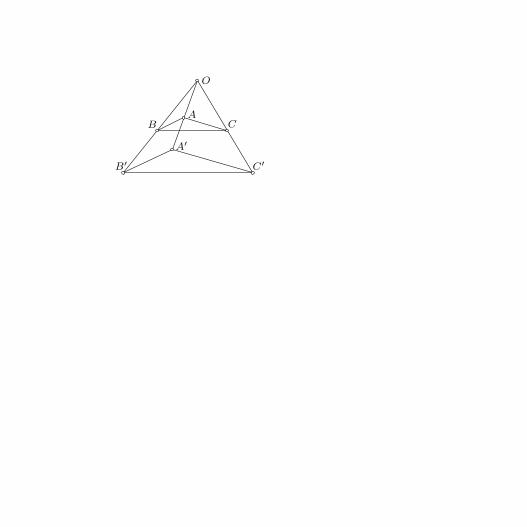
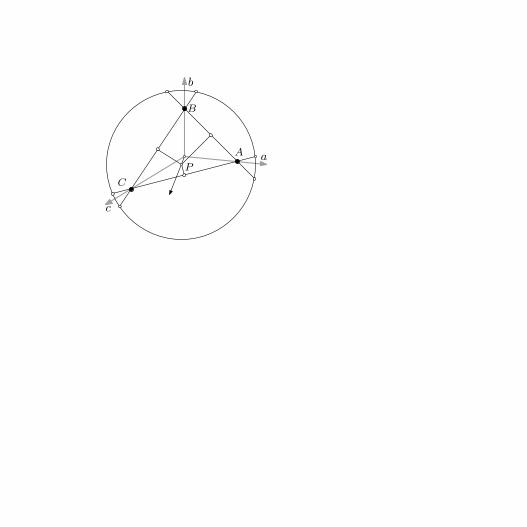
Chapter 13
AB
a
b
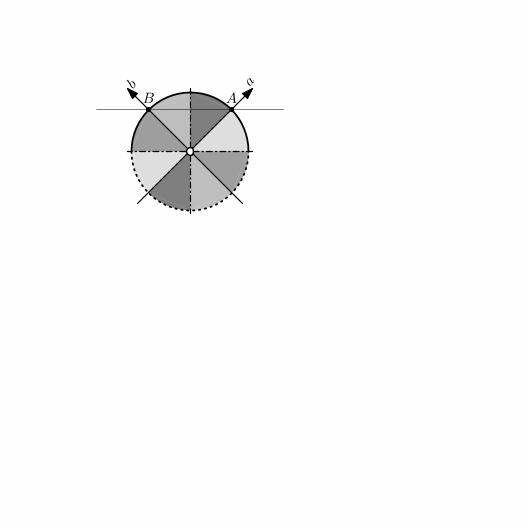
ABab
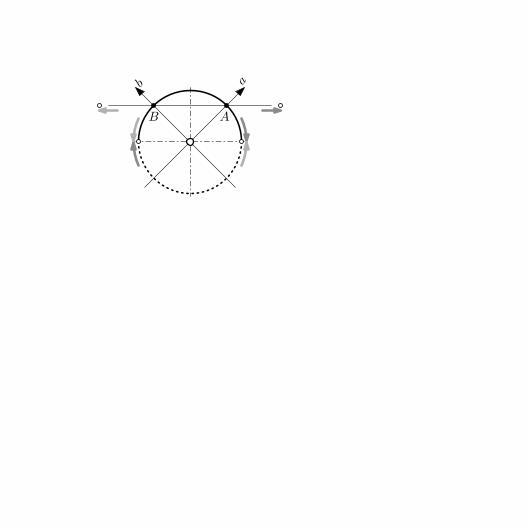
AB
ab
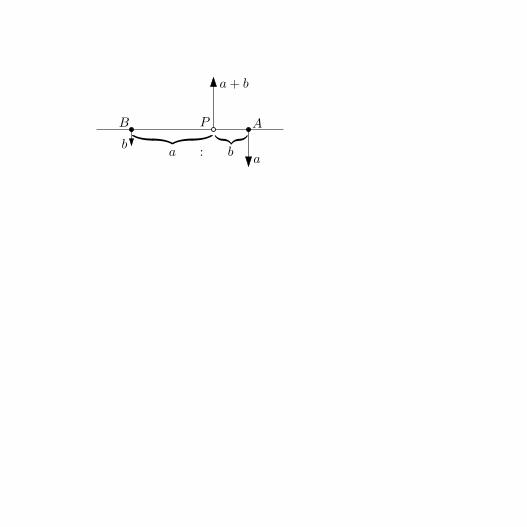
AB P
ba
a + b
︸︷︷︸︸︷︷︸a b:
A
B
P (a, b)
b
a
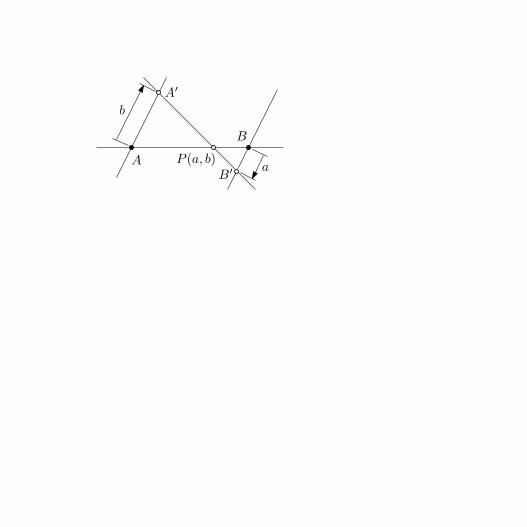
A′
B′
AB ab
Q
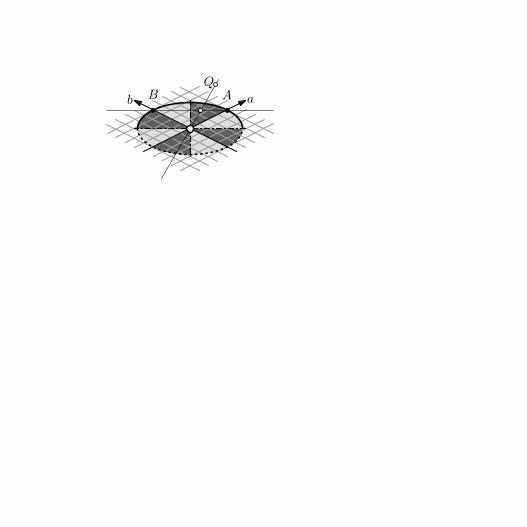
A
B
C
P
c
a
b
l
A
B
C
P
c
a
b
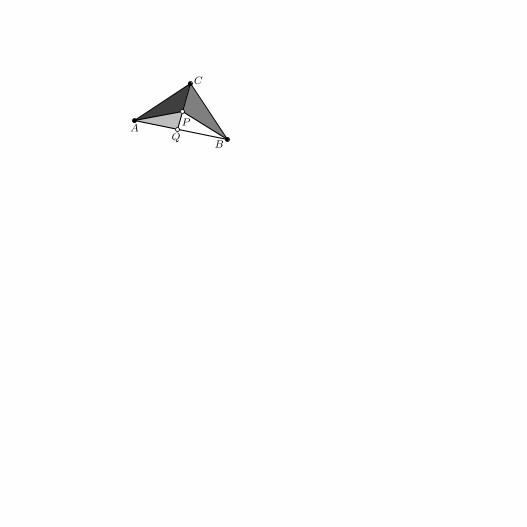
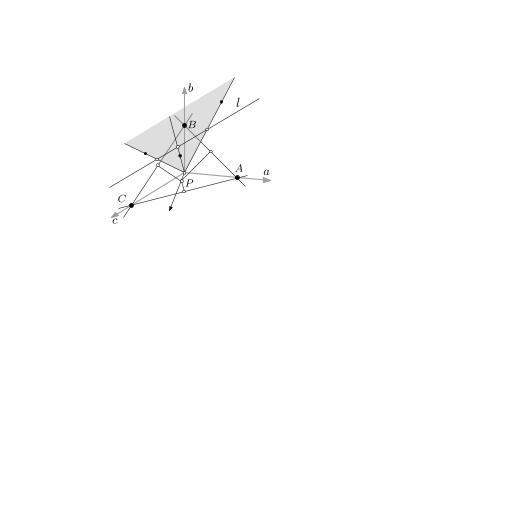
A
B
C
P
Q
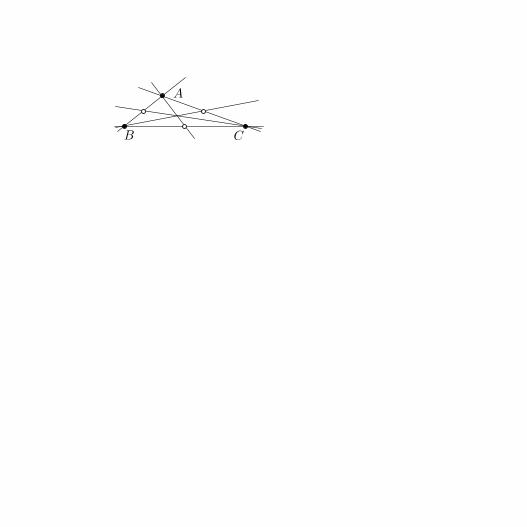
A
B C
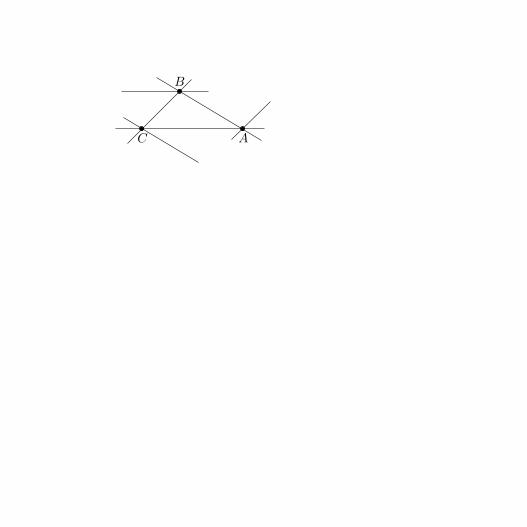
A
B
C

Chapter 14

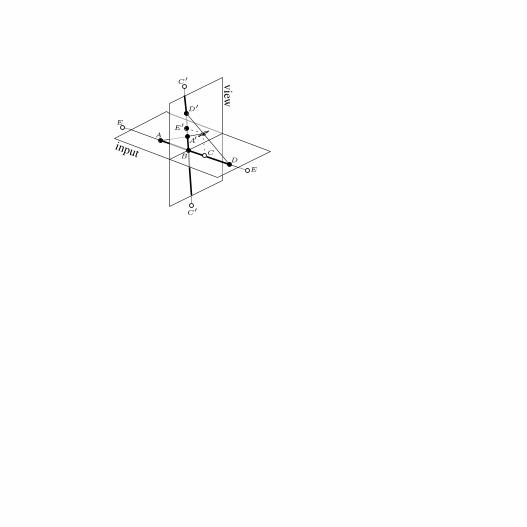
D
A
C
C′
D′
E
E
C′
E′
A′
B
view
input
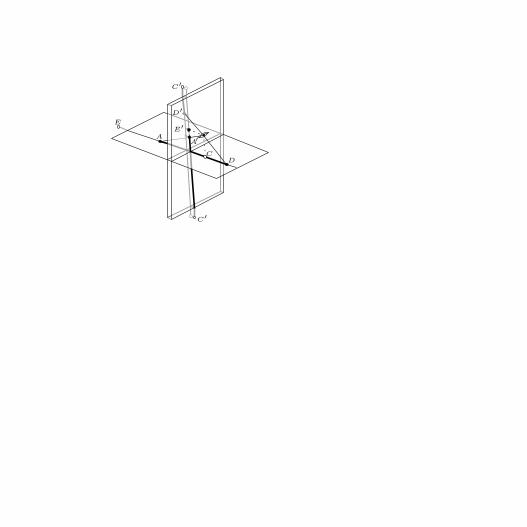
A
C
A′
C′
D
E
C′
E′
D′
A
C
A′
C′
D
E
E
C′
E′
D′
x
w
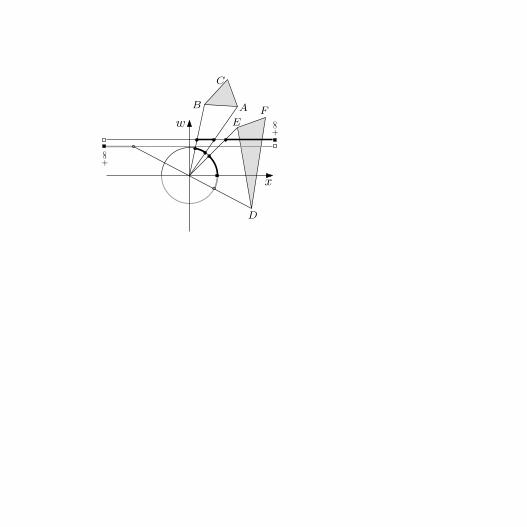
AB
C
D
EF
+∞
+∞
x
w
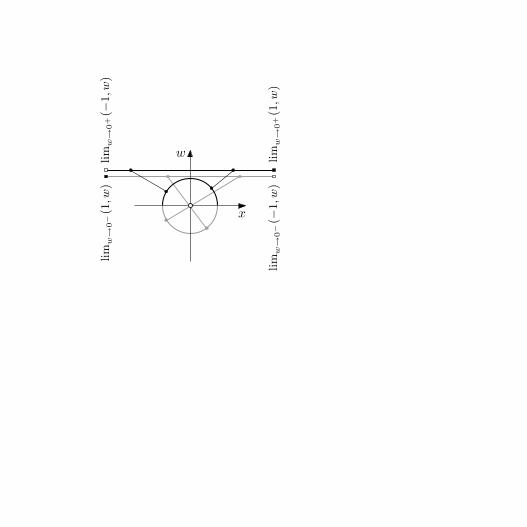
x
w
lim
w→
0+(−
1,w
)
lim
w→
0−
(−1,w
)lim
w→
0+(1
,w)
lim
w→
0−
(1,w
)
x
y
w
x
y
w
+ve+ve
N

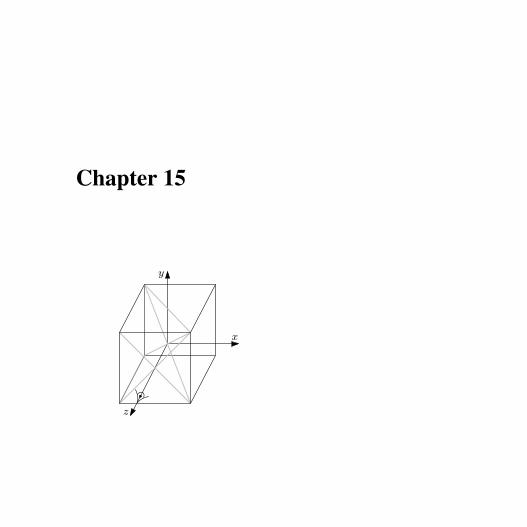
Chapter 15
x
y
z
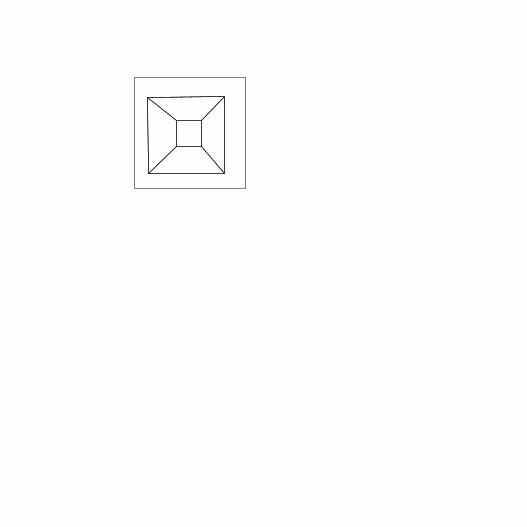
A
B
B′
C
x
z
A′ C′
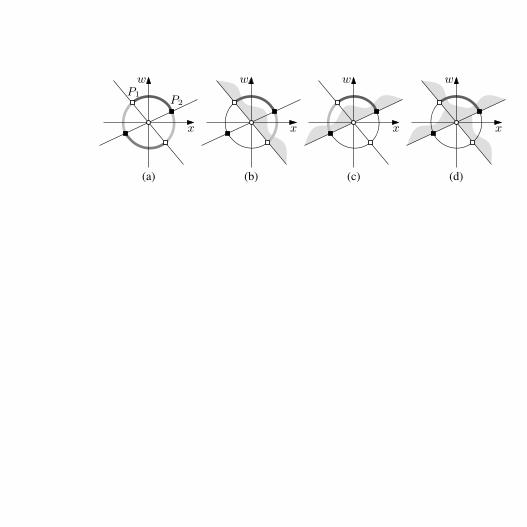
w
x
(a)
P2P1
(b) (d)(c)
w
x
w
x
w
x
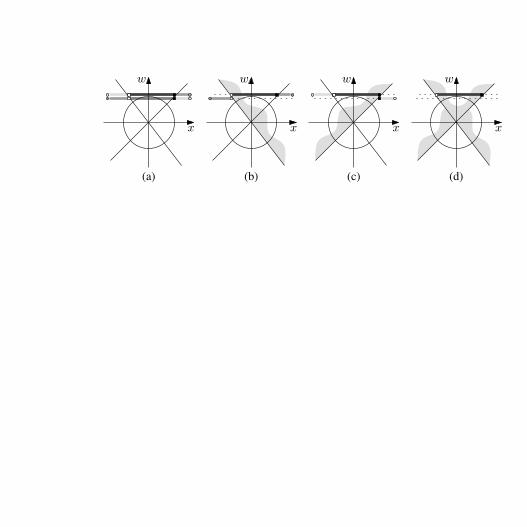
w
x
(a) (b) (d)
w
x
w
x
w
x
(c)
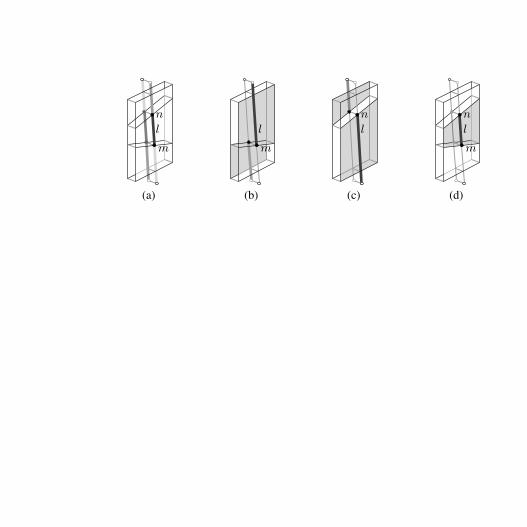
(a) (b) (d)(c)
m
n
l
m
l
n
l
m
n
l
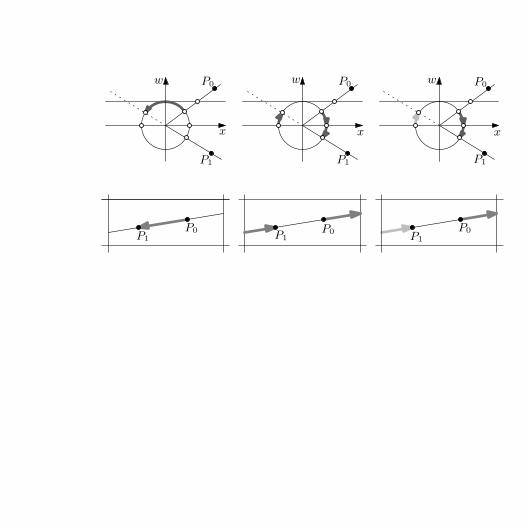
w
x
P0
P1
w
x
P0
P1
w
x
P0
P1
P0P1
P0P1
P0P1
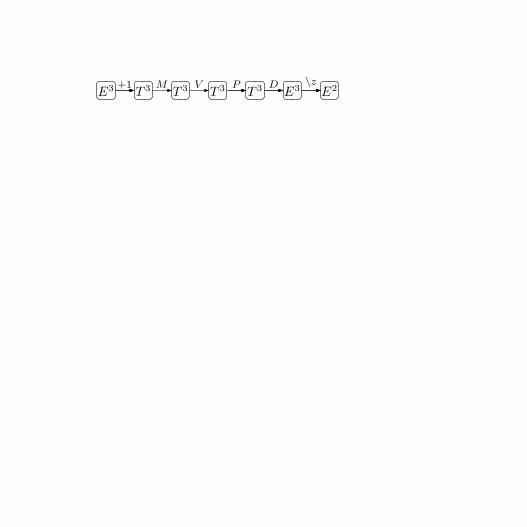
E3 T 3 E3 E2V P D \z+1T 3 T 3M
T 3
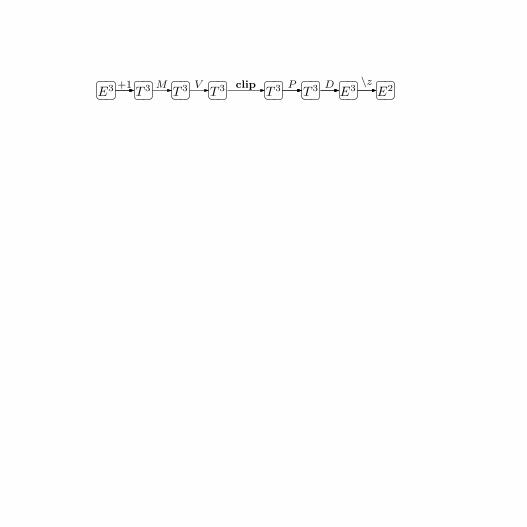
E3 T 3 E3 E2V P Dclip \z+1T 3T 3 T 3M
T 3
E3 T 3 E3 E2V P Dclip \z+1T 3T 3 T 3M
T 3
E3 T 3 E3 E2V P Dclip \z+1T 3 T 3 T 3M
T 3
x
z
x
z
x
z
x
z
x
z
x
z
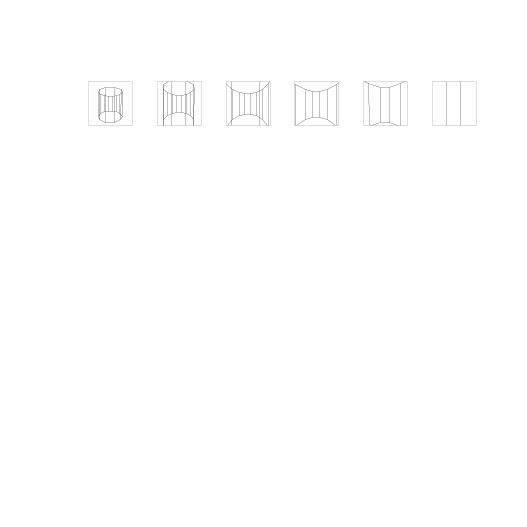
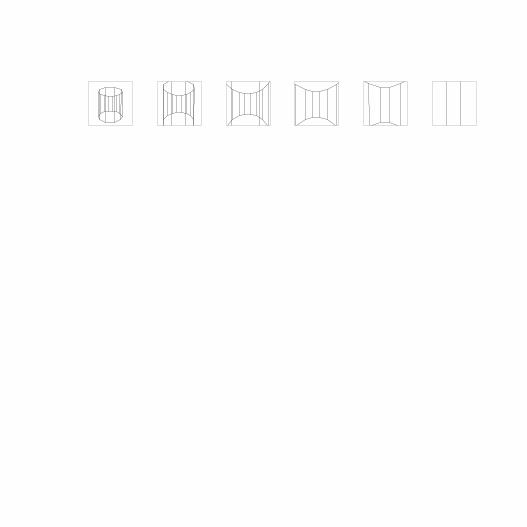
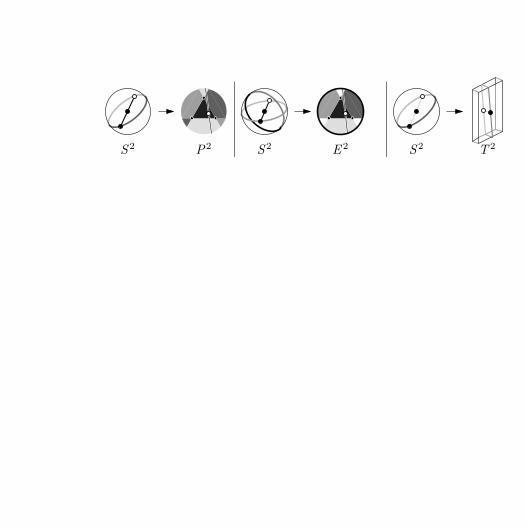
S 2 P2 T 2S 2 E 2 S 2
Chapter 16
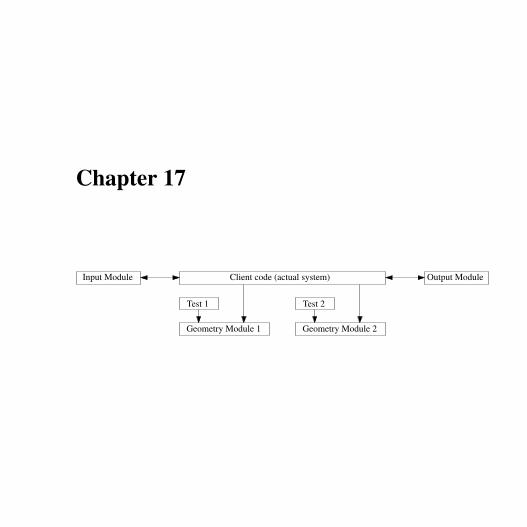
Chapter 17
Geometry Module 1 Geometry Module 2
Test 1 Test 2
Client code (actual system)Input Module Output Module

Chapter 18

Chapter 19

Chapter 20
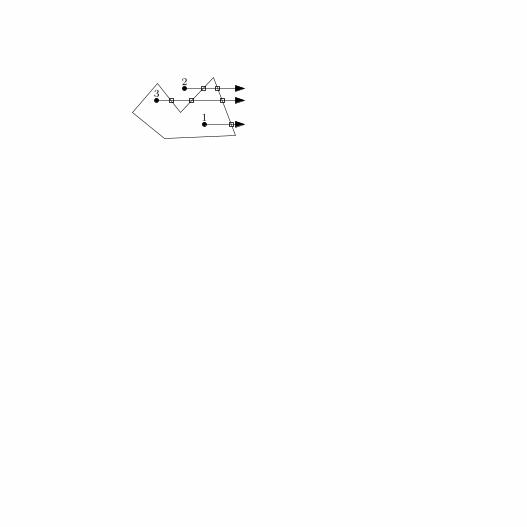
1
32

2?

1 + 1 = 2 =⇒ outside?
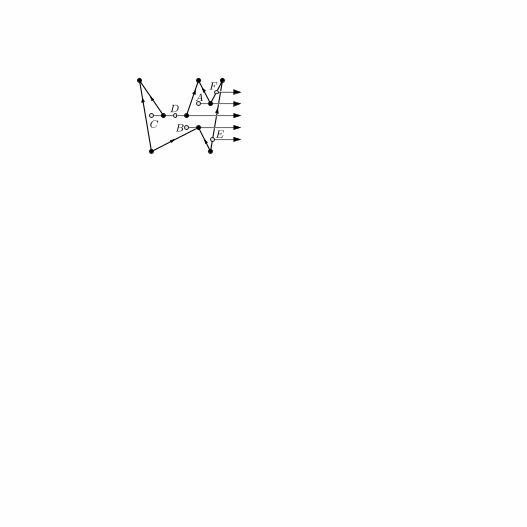
A
BC
D
E
F

≤<
ignored

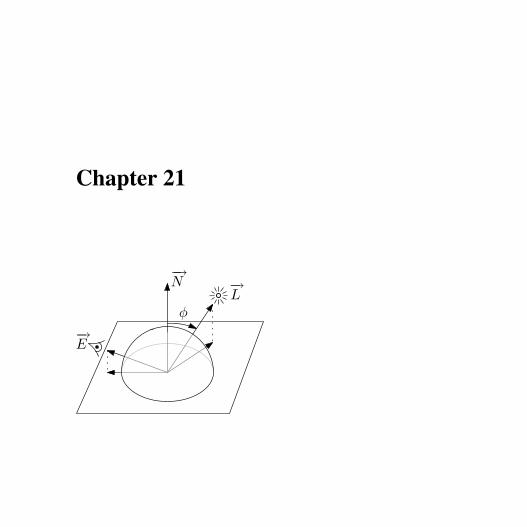
Chapter 21
−→E
−→N −→
Lφ

−→E
−→N
ψ
−→H −→
L

−→N
−→L
−→N
−→N
ambient+
diffuse (per light)
−→L
−→L
specular (per light) a + d + s
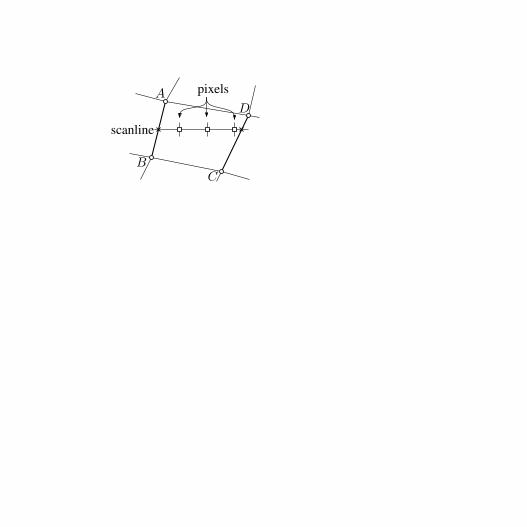
scanline
A
BC
D
pixels
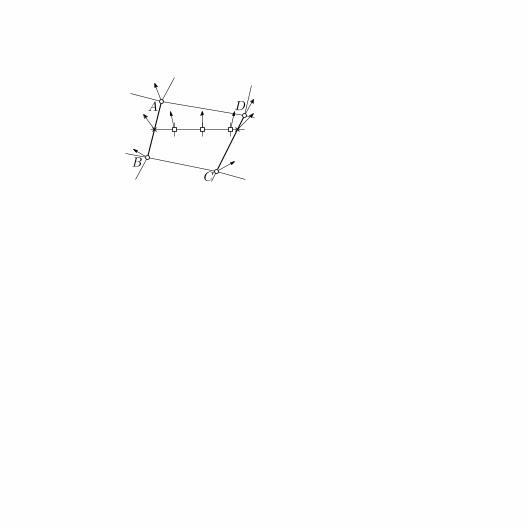
A
BC
D

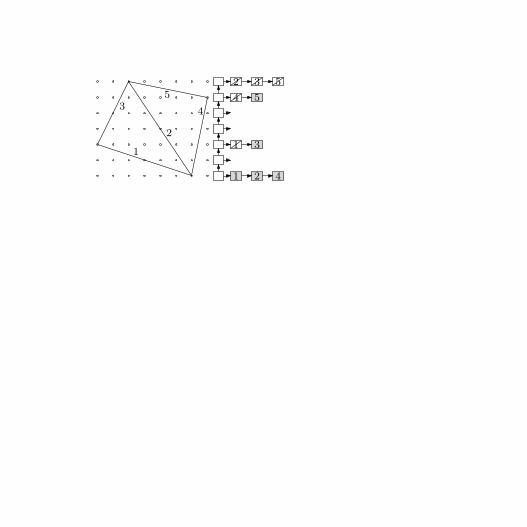
Chapter 22
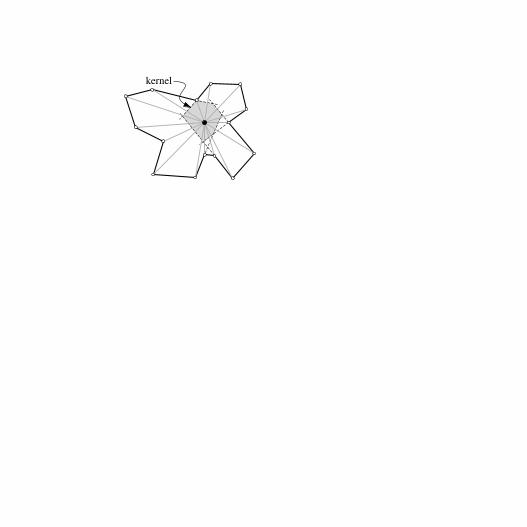
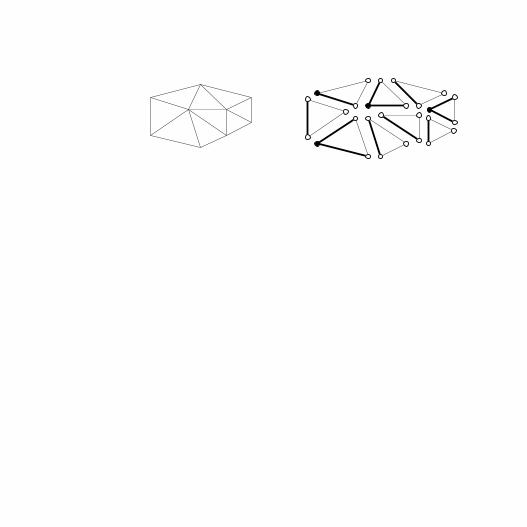
kernel
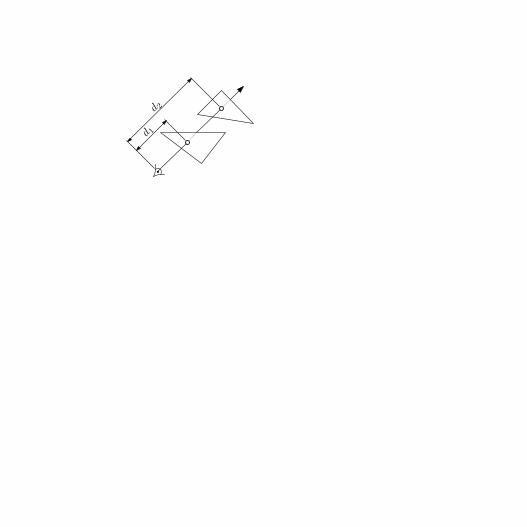
d 1
d 2
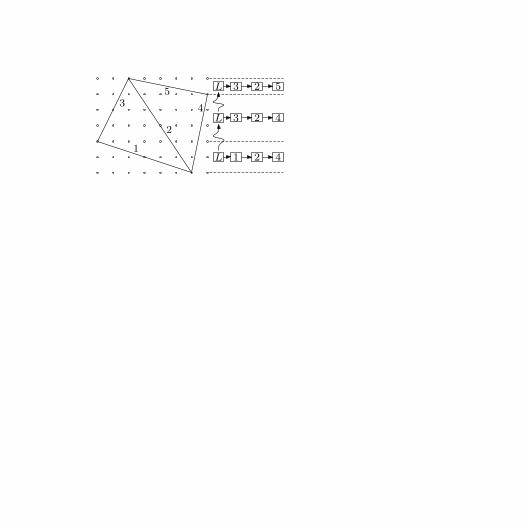
35
2
4
1
4
41
L
L
3 2 5
3 2
L 2
3
35
2
4
1
4
41
32 5
2
1
5
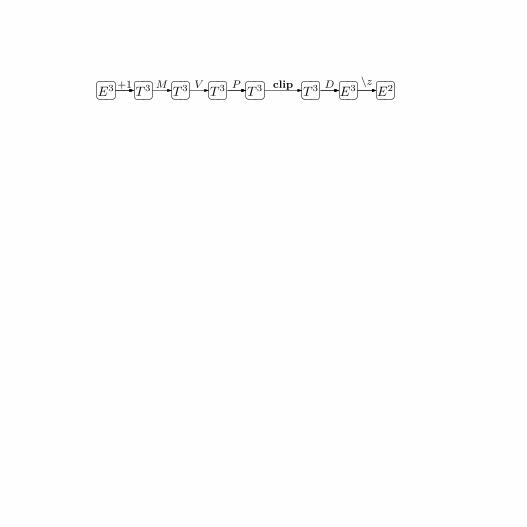
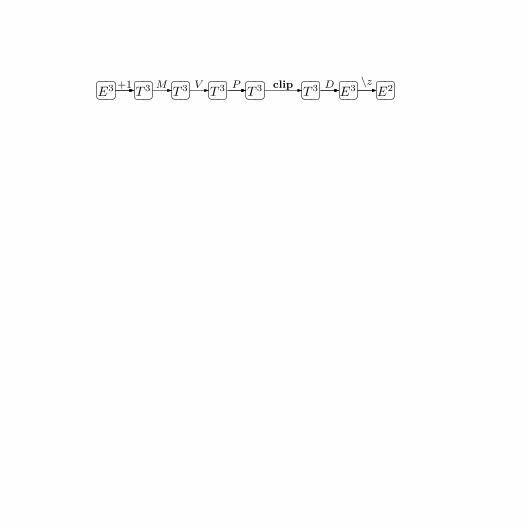
E3 T 3 E3 E2V P Dclip \z+1T 3 T 3 T 3M
T 3

E3 T 3 E3 E2(N)V P Dclip Vis+1T 3 T 3 T 3M
T 3

E3 T 3 E3 E2(N)V P Dclip Vis+1T 3 T 3 T 3M
T 3 ShadeT 3

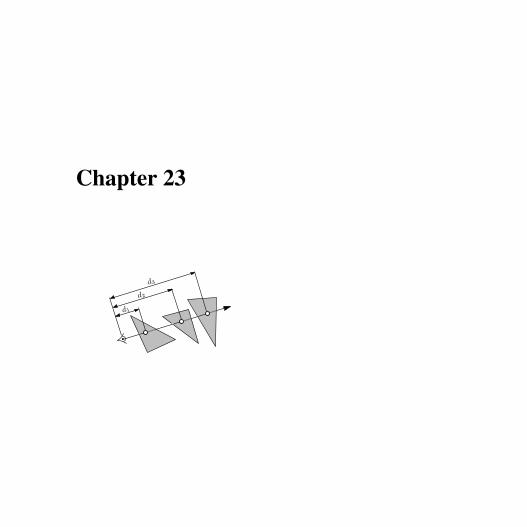
Chapter 23
d1
d2
d3
−→u
−→v −−→n
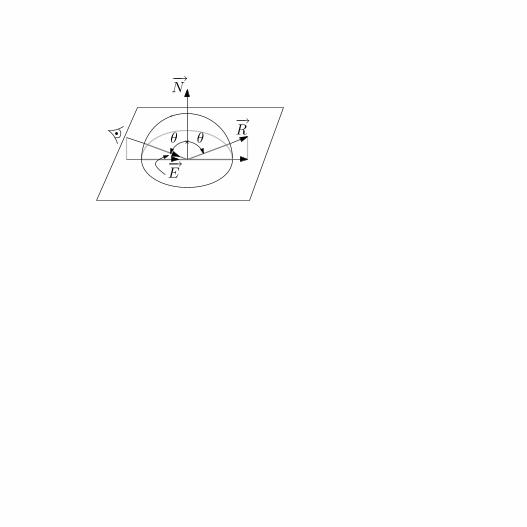
−→E
−→N
−→R
θ θ
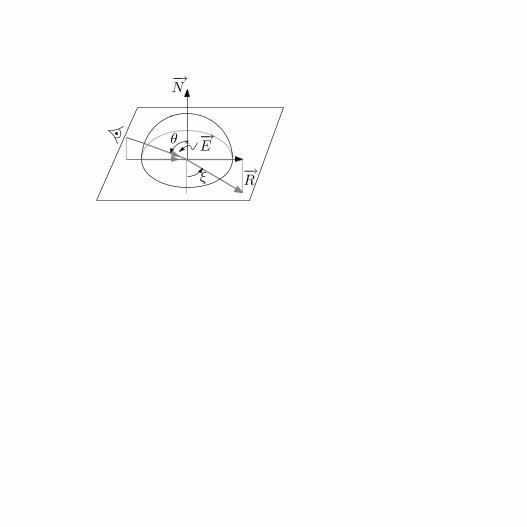
−→E
−→N
−→R
θ
ξ

Chapter 24
Nk −Rk
< 0
R
> 0

LL
LR RR
RL
N
Chapter 25


Chapter 26

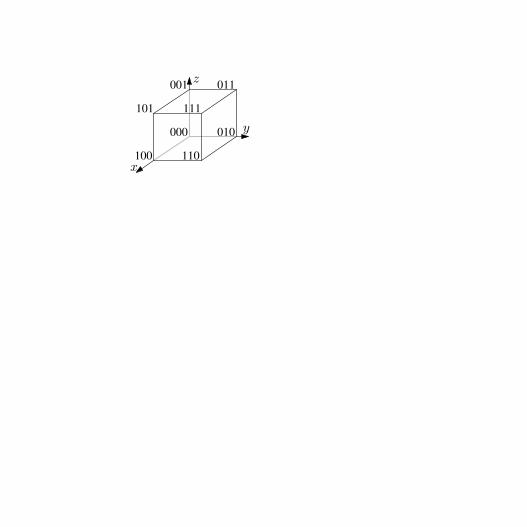
z
y
x
000
100
001 011
010
111
110
101
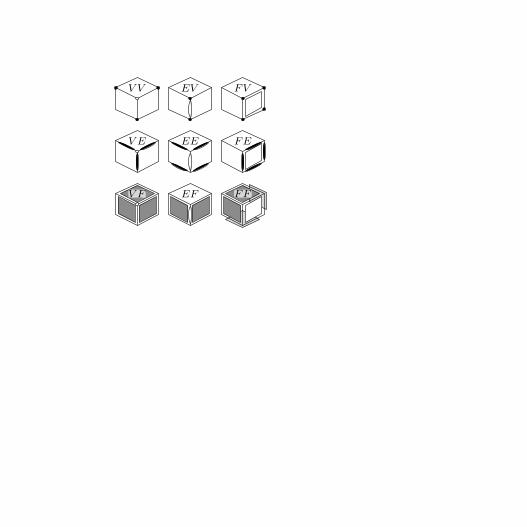
V V EV FV
V E EE FE
EF FFV F
x
y
z
x
y
z
x
y
z
1
1
t

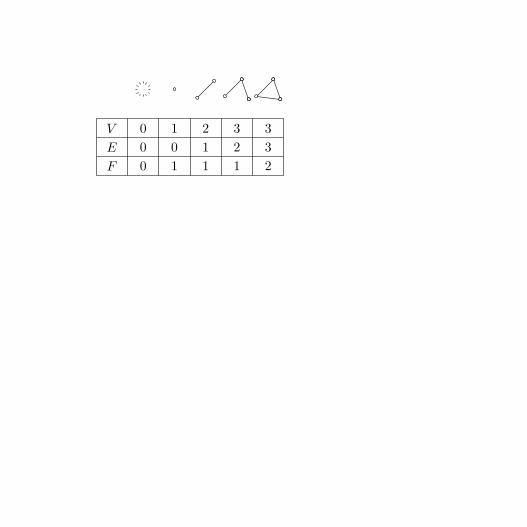
V
E
F
1
0 1
211
000
21
3 3
23
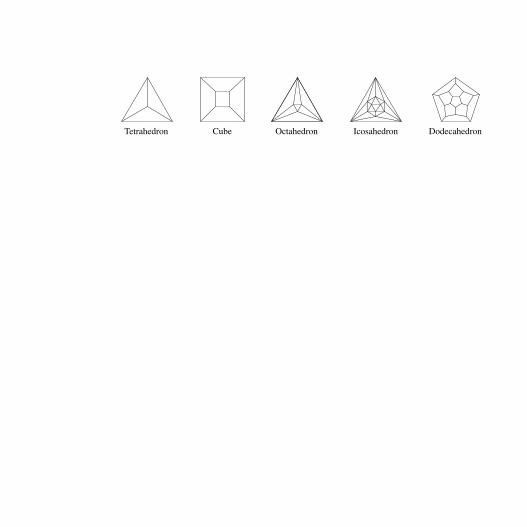
Tetrahedron Cube Octahedron Icosahedron Dodecahedron
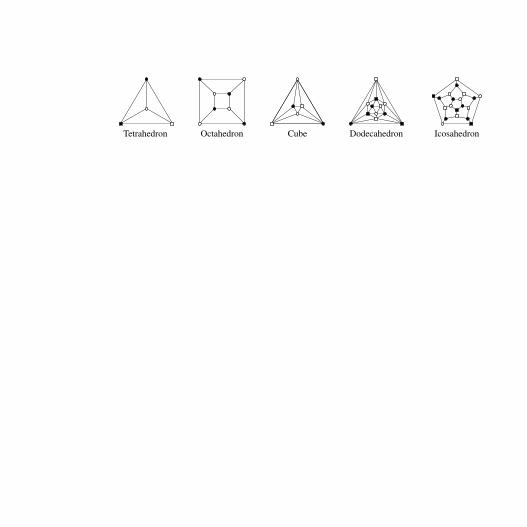
Tetrahedron CubeOctahedron IcosahedronDodecahedron
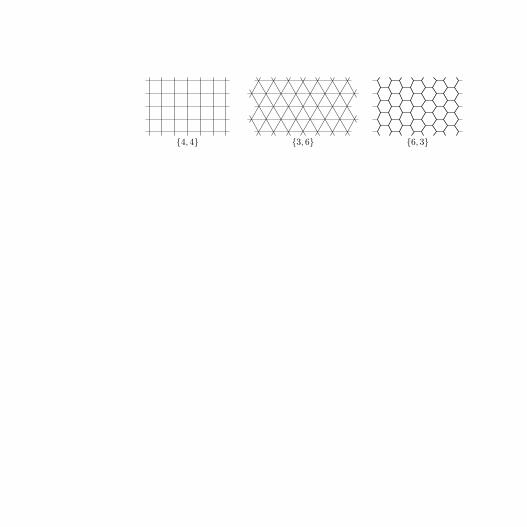
{4, 4} {3, 6} {6, 3}
. . .
Chapter 27

outgoing edge
sourcetarget
succpred
twin
faceedge F
F
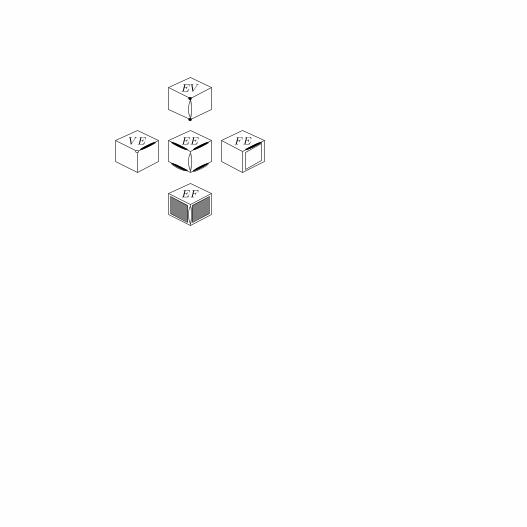
EV
V E EE FE
EF
TF
TF
TF
TFTF
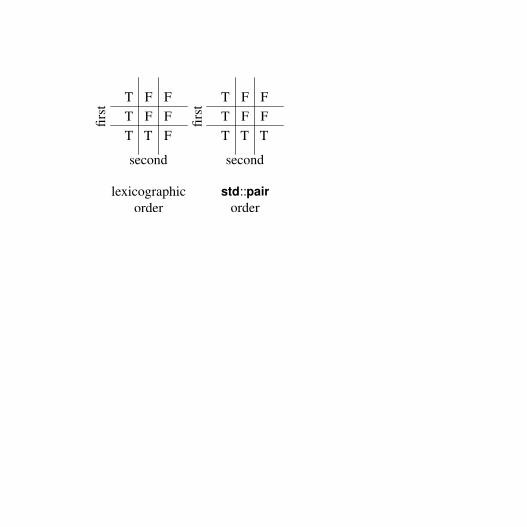
T
F
T
FTF
lexicographicorder
std::pairorder
Ffir
st
second second
first
T
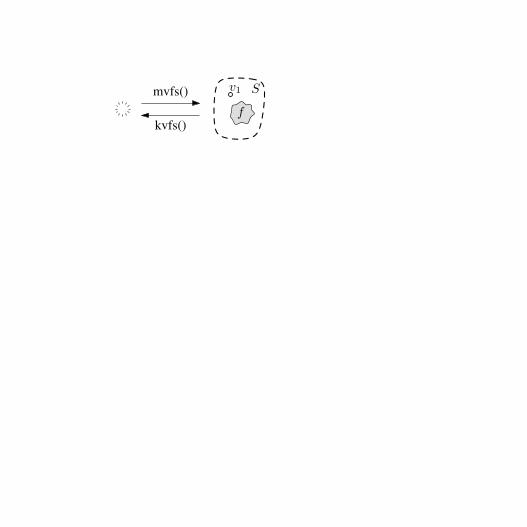
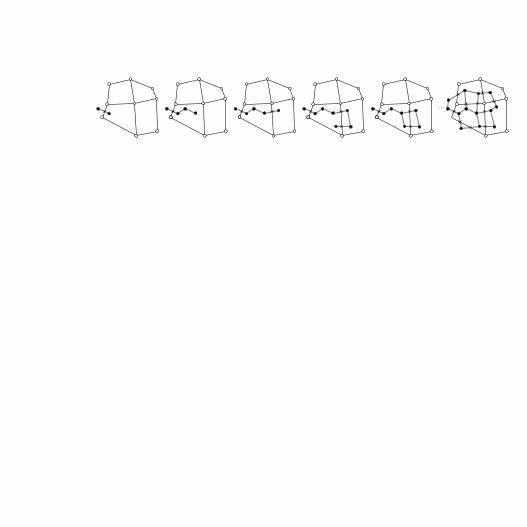
kvfs()
mvfs() v1 S
f
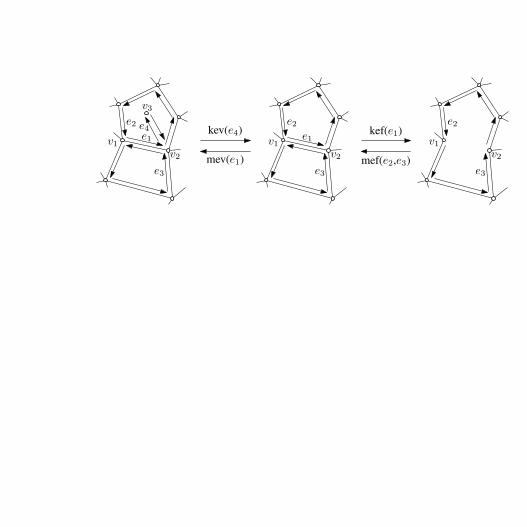
kef(e1)
mef(e2,e3)mev(e1)
kev(e4)v1
v2
e1
e3
e2
v3
e4
v1
v2
e1
e3
e2
v1
v2
e3
e2
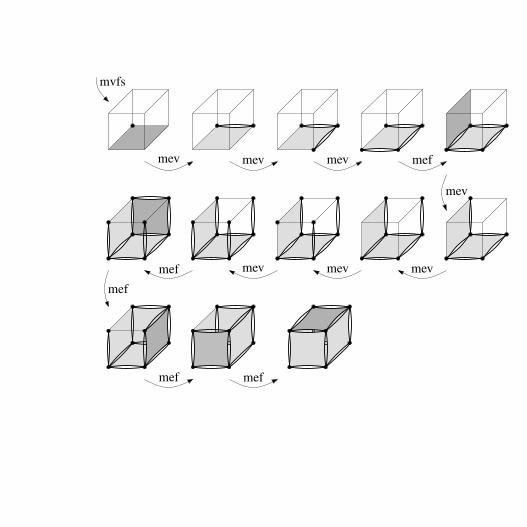
mev mev mev mef
mvfs
mev
mevmevmevmef
mef
mef mef


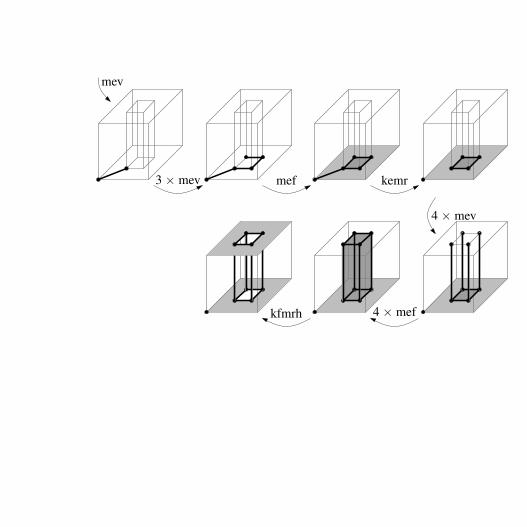
mev
3 × mev mef kemr
4 × mefkfmrh
4 × mev


Chapter 28
−3 0 2 5
−3
0
25
a
c
b
a
b
c

−3 0 2 5
−3
0
25
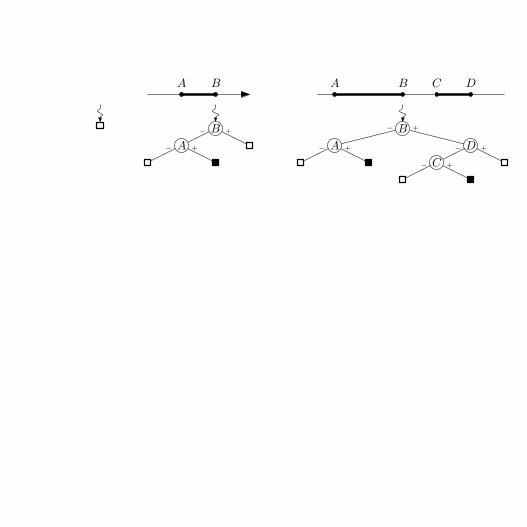
A− +
− + − +
− +
− +
− +
A B A B
B
A
B
C
D
DC
A
B
B
A
A B
− + − +
− +− +
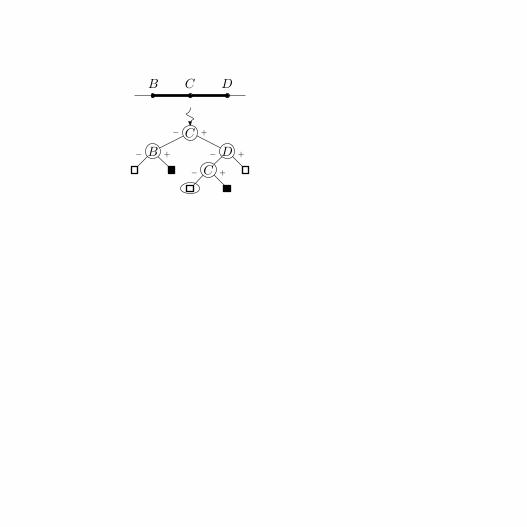
− +
− +
− +
− +
B
B
C
D
DC
C
C D
C D
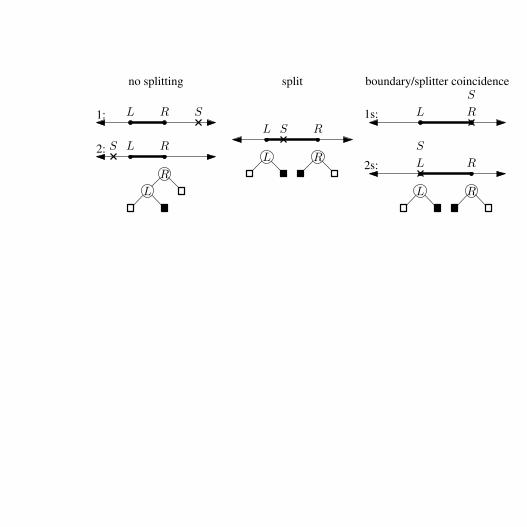
L R S
L RS
L RS
L
R
L R
1:
2:
splitno splitting
L R
S
L R
S
1s:
2s:
L R
boundary/splitter coincidence
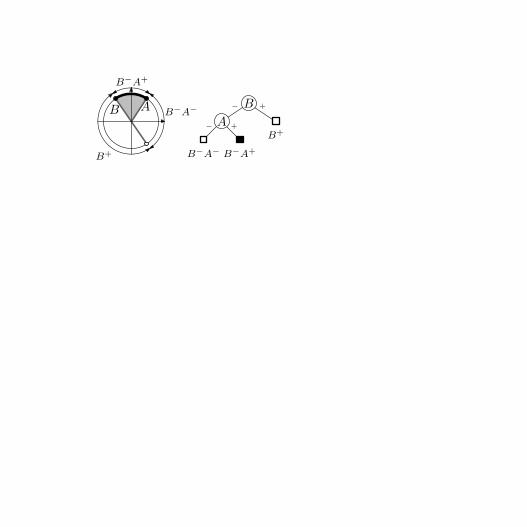
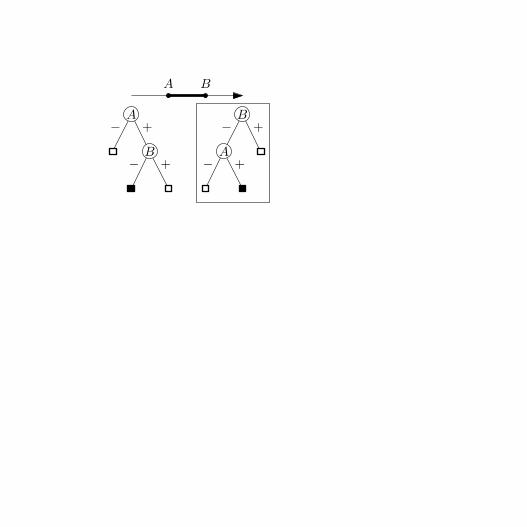
AB B
A
− +
− +
B+
B−A+
B−A−
B−A+B−A−
B+

P
P+ = φP− = S
−
+P −
+P
split
−
+P −
+P
P+ = SP− = φ
−
+P −
+P −
+P −
+
split
st s
ts
t s t s t s
tstst
case b case c1 case c2 case c3 case d case a1case a3case a2
ABB
A
B
A C
− +
− +
− +
− + − +
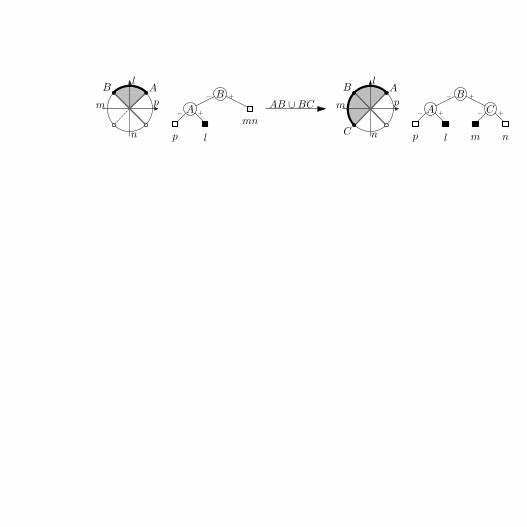
l
m
n l
AB
C
l
m
n
mn
p
p
p
lp nm
AB ∪BC
B
C
C
B
− +
− +
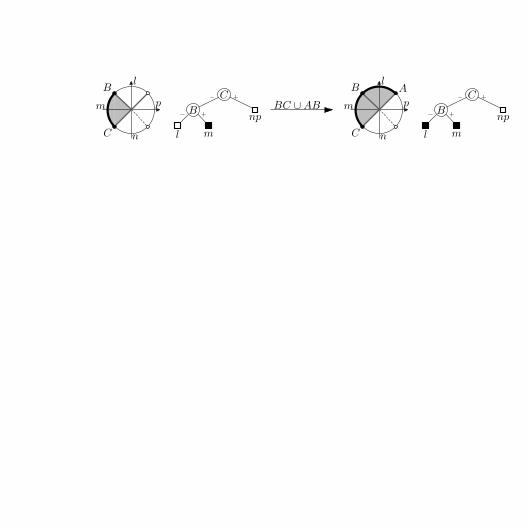
l
m
n m
AB
C
l
m
n
np
p
l
pC
B
− +
− +
m
np
l
BC ∪AB
A
B B− +

E2
+ +
+
E3
+ +
+
+
+−
+−
+
−
+
−
+
−+
−
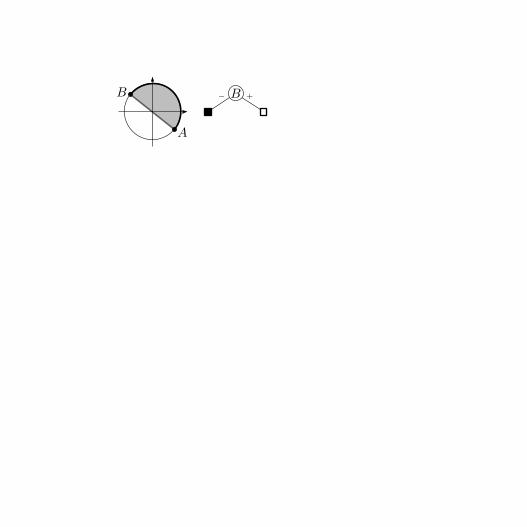
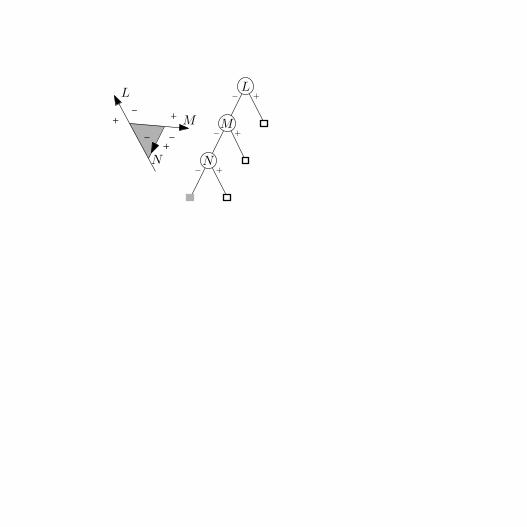
M
N
M
N
L+−
+−
+−
L
+
−
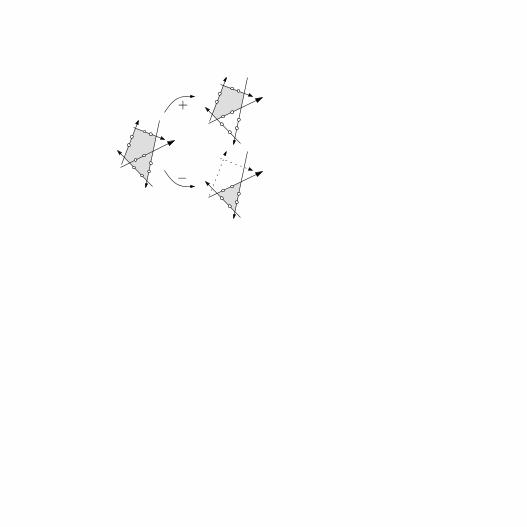
(a)
(b)
(c)
(d)
(e)
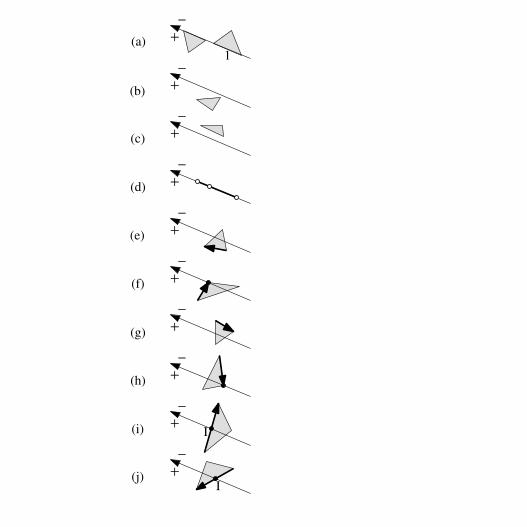
1
+
−+
−
+
−+
−
+
−+
−
+
−+
−
+
−+
−
(f)
(g)
(h)
(i)
(j)
I
I
+
−+
−
+
−+
−
+
−+
−
+
−+
−
+
−+
−
BC
AB
CA
EF
F D
BC
AB
CA
A
B C
D
F
E
A
BC

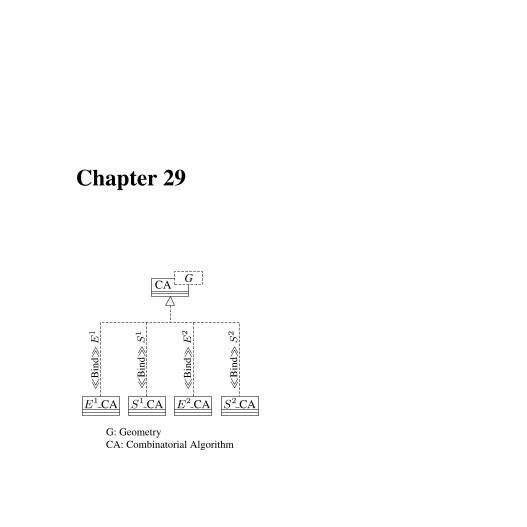
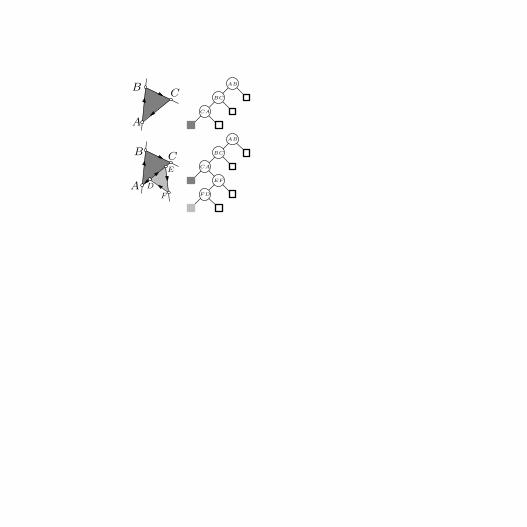
Chapter 29
G: GeometryCA: Combinatorial Algorithm
E1 CA S1 CA E2 CA S2 CA
�B
ind�
E1
�B
ind�
S1
�B
ind�
E2
�B
ind�
S2
CA G
B C
D
EF
A
CA
BC
+
+
+
−−
−
EF
FD
DE
+
+
+
−−
−
AB
D
F
B C
A CA
BC
+
+
+
−−
−
EF
FD
DE
+
+
+
−−
−
AB
B C
D
EF
ACA
BC
+
+
+
−−
−
EF
DE
+
+
−−
AB
BE
DA
C
F
CA
BC
+
+
+
−−
−
EF
DE
+
+
−−
AB
source
target
A
B
A
B

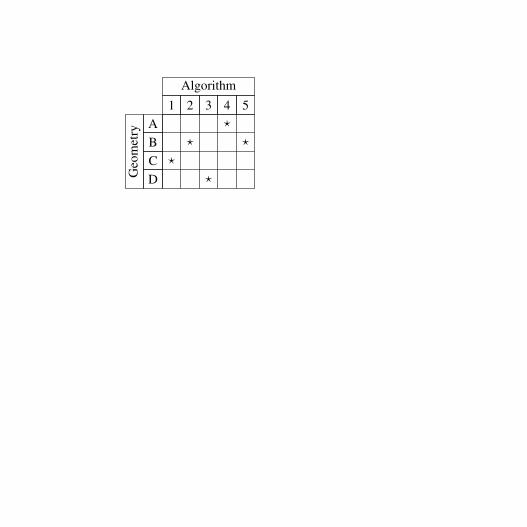
Algorithm
Geo
met
ry
1 2 3 4 5ABCD
?
?
?
?
?
Chapter 30
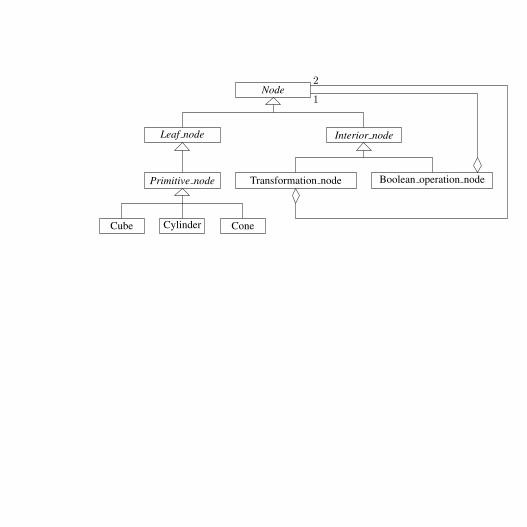
Node
Primitive node Transformation node Boolean operation node
Cylinder ConeCube
Leaf node Interior node
2
1
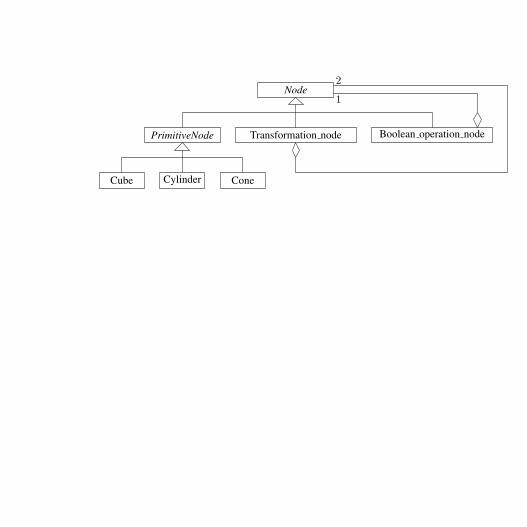
PrimitiveNode Transformation node Boolean operation node
Cylinder ConeCube
Node2
1
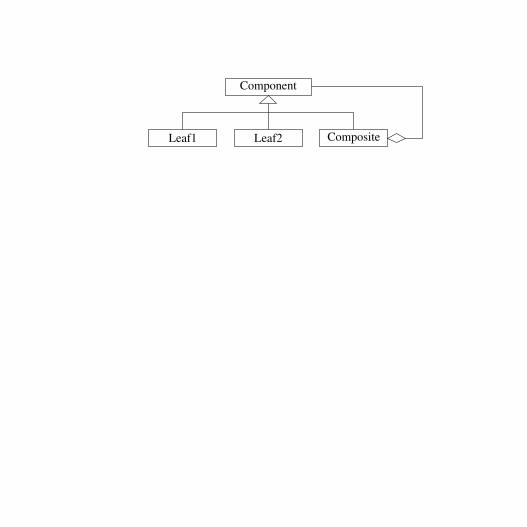
Component
Leaf1 Leaf2 Composite
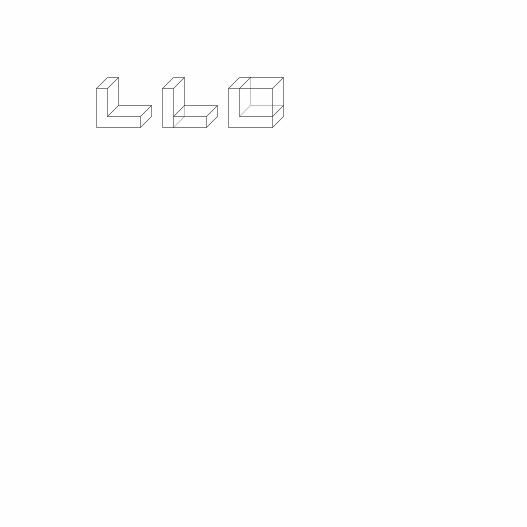
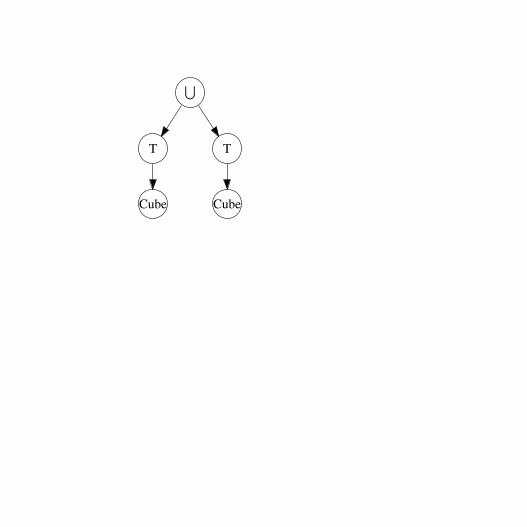
⋃
Cube
T
Cube
T
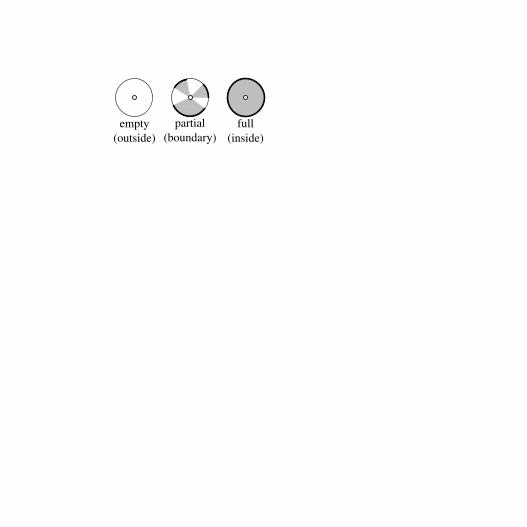
empty(outside)
partial(boundary)
full(inside)
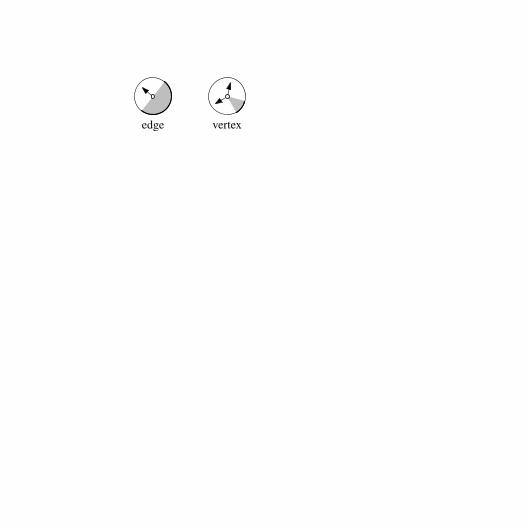
edge vertex

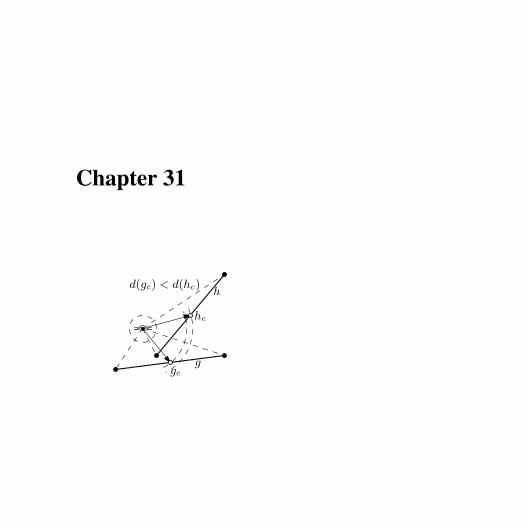
Chapter 31
h
hc
ggc
d(gc) < d(hc)
E
E′
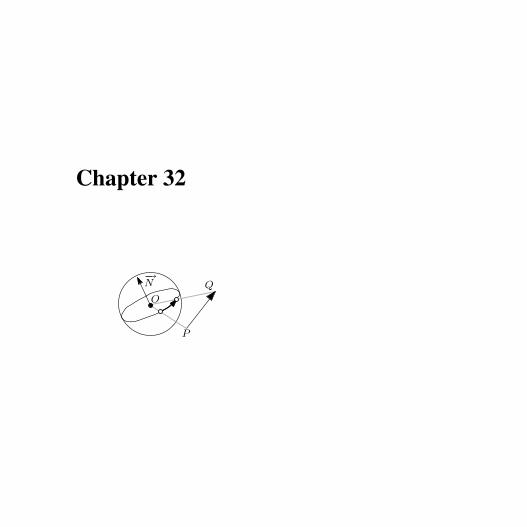
Chapter 32
P
Q−→N
O

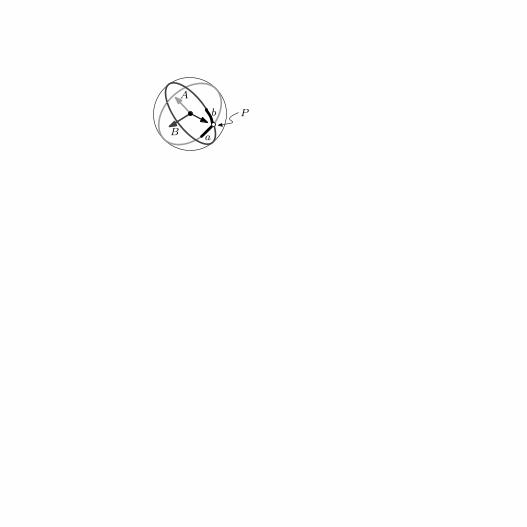
A
B a
b P


Appendix A
letter
210 mm8.5”
A4
297m
m11”
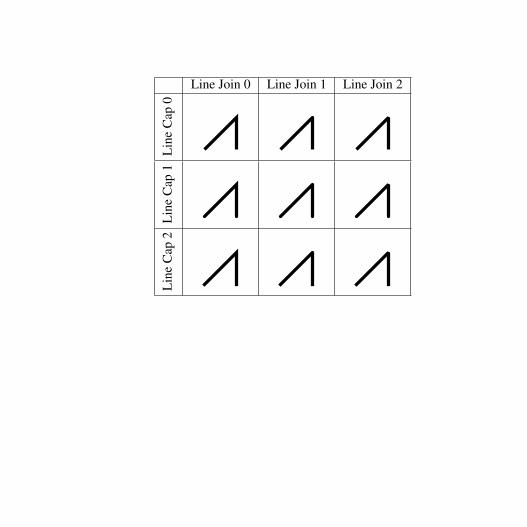
Line Join 0 Line Join 1 Line Join 2
Lin
eC
ap0
Lin
eC
ap1
Lin
eC
ap2


Cogito ergo sum
Cogito ergo sum

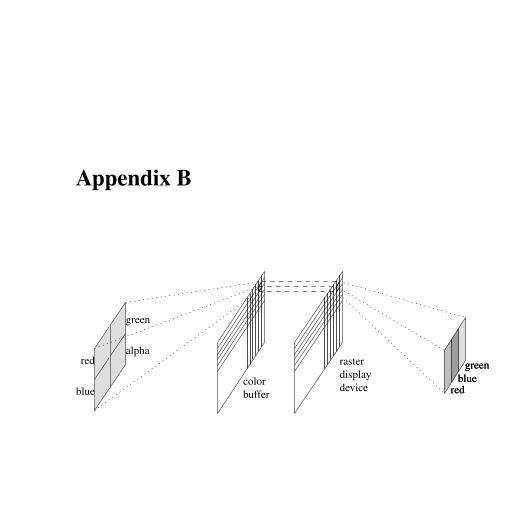
Appendix B
colorbuffer
rasterdisplaydevice red
bluegreen
redblue
greenred
green
blue
alpha
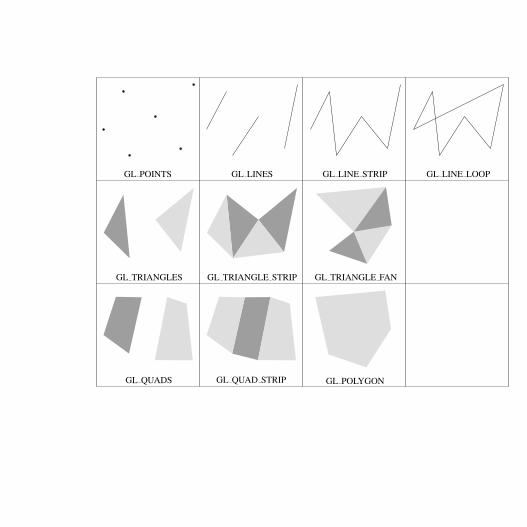
GL LINES GL LINE STRIP GL LINE LOOP
GL TRIANGLES GL TRIANGLE STRIP GL TRIANGLE FAN
GL QUAD STRIPGL QUADS GL POLYGON
GL POINTS
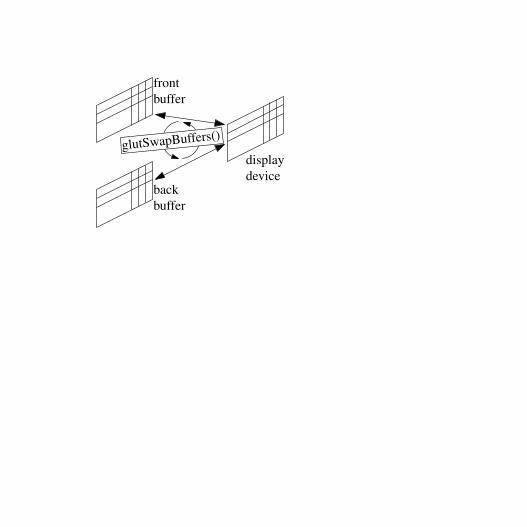
frontbuffer
backbuffer
displaydevice
glutSwapBuffers()
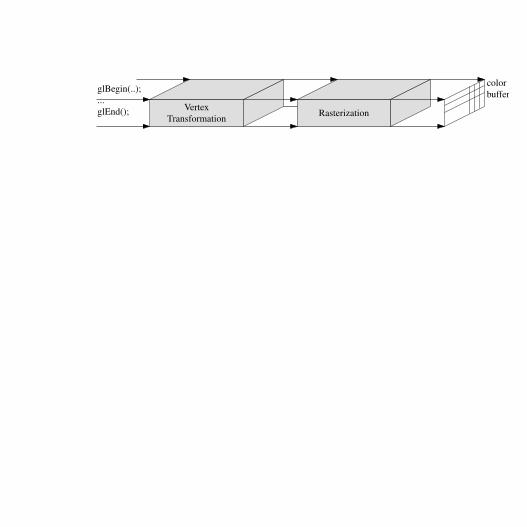
colorbuffer
VertexTransformation Rasterization
glBegin(..);...glEnd();
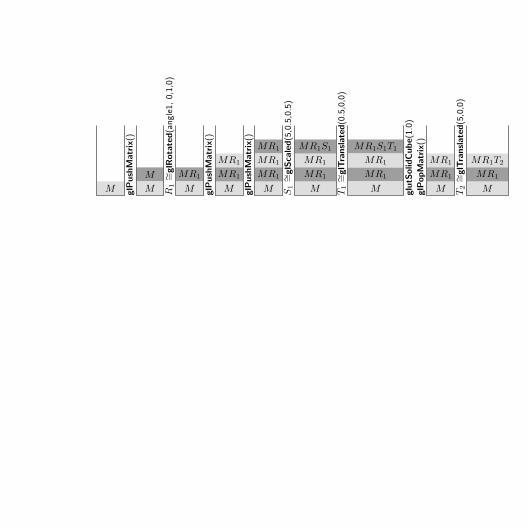
glP
ush
Matr
ix()
R1∼ =
glR
ota
ted(a
ngle
1,0,1
,0)
glP
ush
Matr
ix()
glP
ush
Matr
ix()
S1∼ =
glS
cale
d(5
,0.5
,0.5
)
T1∼ =
glT
ranslate
d(0
.5,0
,0)
glu
tSolid
Cube(
1.0
)
glP
opM
atr
ix()
T2∼ =
glT
ranslate
d(5
,0,0
)
M
MR1
MR1
MR1
M M
M
M
MR1
M
MR1
MR1
M
MR1
MR1
MR1S1
M
MR1
MR1
MR1S1T1
M
MR1
MR1
M
MR1
MR1T2

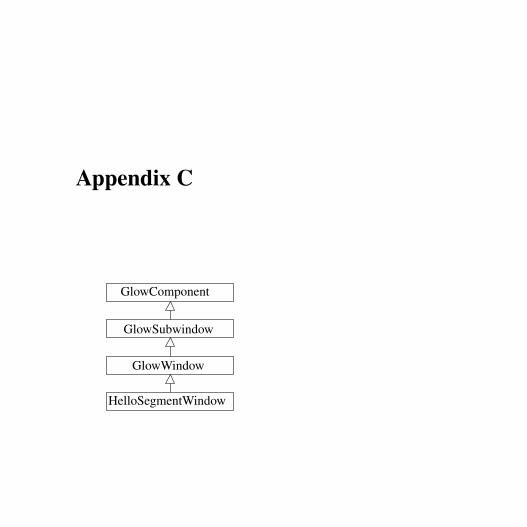
Appendix C
GlowComponent
GlowSubwindow
GlowWindow
HelloSegmentWindow

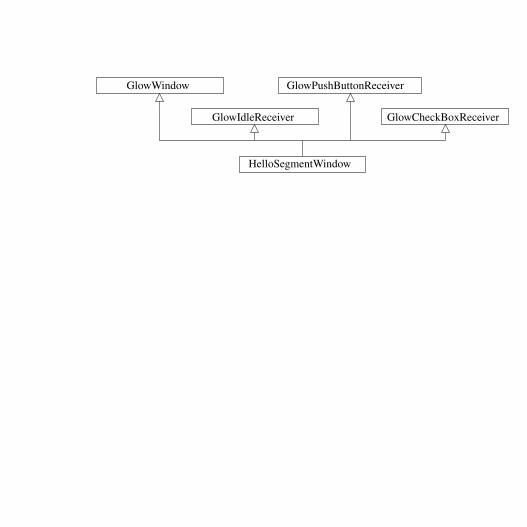
GlowWindow
HelloSegmentWindow
GlowCheckBoxReceiver
GlowPushButtonReceiver
GlowIdleReceiver
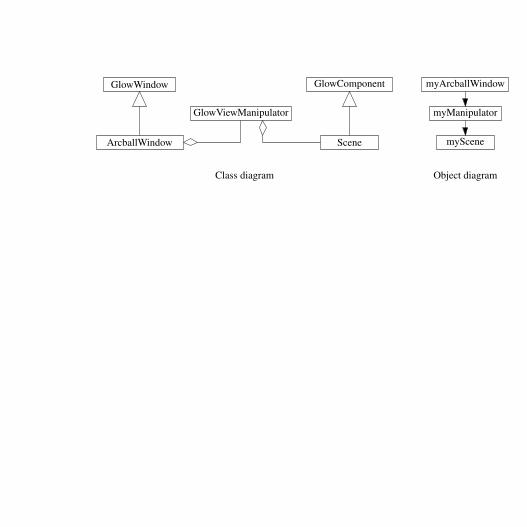
Scene
GlowComponentGlowWindow
GlowViewManipulator
Class diagram Object diagram
myArcballWindow
myManipulator
mySceneArcballWindow
Top Related