





γλώσσες
Σελίδες
Νομικός

![Page 1: [IEEE 1999 2nd Workshop on Signal Processing Advances in Wireless - Annapolis, MD, USA (9-12 May 1999)] 1999 2nd IEEE Workshop on Signal Processing Advances in Wireless Communications](https://reader043.fdocument.org/reader043/viewer/2022022201/5750a48a1a28abcf0cab232d/html5/page/1.jpg)
JOINT ANGLE AND DELAY ESTIMATION (JADE) FOR FADING MULTIPATH SIGNALS IN a-STABLE NOISE
B. Kannan W. J . Fitzgerald Signal Processing Lab, Department of Engineering, University of Cambridge
Cambridge CB2 lPZ, UK e-mail: [email protected], fax: 44 01223 332662
ABSTRACT
In wireless communications, transmitted signals arrive at the base station via multiple paths. Estimating each path’s angle of arrival (AOA) and propagation delay is necessary for several applications such as mobile local- isation for emergency services and advanced handover schemes. In conventional JADE methods, the channel impulse response is estimated first from the received samples and then this impulse response is used to esti- mate AOAs and time delays of the multiple paths. In this paper, we propose a Bayesian approach for joint AOA and time delay estimation of fading multipath signals in symmetric a-stable noise. Approximating a-stable noise by Gaussian mixtures, we derive a poste- rior probability density for the AOAs, time delays and the fade amplitudes given the received samples and the model order (number of multipaths). This posterior probability is then used with the Metropolis-Hasting algorithm to derive the samples for the AOAs, time delays and the fade amplitudes. Unlike the conven- tional subspace-based methods, this algorithm can be used with significantly lower number of samples.
1. INTRODUCTION
The estimation of the AOA and the time delay is a central problem in many fields such as radar, sonar and wireless communication, as these estimates can be used for advanced handover schemes or for emergency local- isation. Various sensor array processing methods have been proposed for estimating the AOAs and the time delays of the multiple paths. These include subspace- based methods [l, 21 and maximum likelihood method
The signal processing literature has traditionally been dominated by Gaussian noise model assumptions. However, many classes of noise encountered in the real- world such as underwater acoustic noise, low frequency electromagnetic disturbances, atmospheric noise etc., exhibit outliers that will not fit into a Gaussian noise model. There are several distributions such as log-
11, 31.
normal distribution, Gaussian mixtures, generalised Gaussian models, Cauchy distribution etc., that are used in the literature to model the non-Gaussian noise. Among all these distributions, the a-stable distribution proves to be a more efficient model. Fractional lower order moments methods [4] are used in impulsive noise environments to estimate the signal parameters. In multipath scenario, it is often assumed that the AOAs, time delays and the fade amplitudes are con- stant over each block of transmitted data. In conven- tional methods [l, 21, assuming a Gaussian noise, a training sequence is used to estimate the impulse re- sponse of the channel and then this information is used to estimate the AOAs and the time delays. In this pa- per, we propose a Bayesian approach where the train- ing sequence in each block is used for joint angle and delay estimation of the multiple paths in an additive symmetric a-stable noise (non-Gaussian) environment.
2. PROBLEM FORMULATION
Consider an uniform linear array (ULA) composed of L sensors. We assume that a narrow band transmitted signal is received via M different paths at the ULA and the received data are corrupted by additive zero mean symmetric a-stable (SaS) [5] noise. Let b denotes the fade amplitudes of the multipath signals. We can rep- resent the received data (one block of data) x(k) as
x ( k ) = A(4)Bs(k) +v(k) for IC = 1, 2, ..., N (1)
where B is diagonal matrix of vector b and x(k) and v(k) are L x l vectors. A(4) is a L x M steering matrix
A(4) = M4l) a ( 4 2 ) . . . . . . 4 4 M ) I (2)
where a(4i) is a L x 1 steering vector and can be written as
a(4i) = [I cos(4i) .... COS((L - 1)4i)lT (3)
with
r$i = fodsin(&)/c for i = 1, 2, ..., M (4)
333 0-7803-5599-7/99/$10.OOOl999 IEEE
![Page 2: [IEEE 1999 2nd Workshop on Signal Processing Advances in Wireless - Annapolis, MD, USA (9-12 May 1999)] 1999 2nd IEEE Workshop on Signal Processing Advances in Wireless Communications](https://reader043.fdocument.org/reader043/viewer/2022022201/5750a48a1a28abcf0cab232d/html5/page/2.jpg)
where c and Oi are the speed and AOA of the ith signal respectively. s ( k ) is a M x l vector where the ith row is defined as
0 2 -
0 15
0 1 .
(5) aClua1 p . 4 --
1 Gsuse rnmura e p ~ r o i
- i :; ! I
with ri and q j representing the ith path delay and the j t h transmitted bit sequence respectively. g ( k ) is the modulation waveform and T is the symbol period. Taking into account all the data in x(k), s ( k ) and v(k) for k = l . . . ,N, we can modify (1) as
X = A(4)BS + V (6)
where X, S and V are L x N , A4 x N and L x N matrices respectively.
3. MODELLING &-STABLE NOISE BY GAUSSIAN MIXTURES
The characteristic function [5] of an a-stable distribu- tion is represented by:
$( tu ) = exP{jP - Y I w l a [I + jPsign(w)h(w, ..)I) (7)
where
tan?, i f a f 1 $Iog(wI, i f a = 1
h(w , a ) =
The parameters a , P , y and p are defined as follows: 0 a (0 < a 5 2) is called the characteristic exponent. A large value for a indicates a light tail.
,B (-1 5 p 5 1) is called the symmetry parameter. ,k? = 0 corresponds to a symmetric distribution ( S a S ) . ,f3 < 0 and ,B > 0 correspond to the negatively skewed and positively skewed distribution respectively. 0 p (-co < p < m) is the location parameter. 0 y (0 < y 5 m) is called the dispersion parameter and is a measure of the deviation of the distribution around the mean. An a-stable distribution can be approximated by a finiteGaussian mixture [6] as shown below:
K
Pa,P,-/,&) = riJ% P , Oi) (8) i=l
where N ( n , p , ~ i ) denotes a Gaussian distribution with mean p and standard deviation ui. ri is the scaling factor of the ith component. Given the parameters a , @, y, p and the number of Gaussian components I<, we can use the algorithm in [B] to estimate the ri and ' ~ i
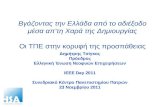
(for i = l . . .K) . Figure (1) shows the Gaussian mixture approximation of an S a S for cy = 1.1 and .P = 0.2. In
I , -40 -30 -20 -10 0 10 20 30 4
Figure 1. Gaussian mixture approximation when a = 1.1 and /3 = 0.2
4. METROPOLIS-HASTING ALGORITHM
We use the Metropolis-Hasting (M-H) [8] algorithm to get the samples of the marginal posterior probability densities of the unknown parameters from their joint posterior probability density function. The energy @(z) of a posterior distribution p ( z I X,M) is defined by
where
The Metropolis algorithm can be defined by the following steps: 0 Given the current parameter vector z' at the k t h iteration, draw the parameter vector zkzi at the ( k + l)th iteration from a symmetric proposal density. 0 Evaluate the energy difference S = @(d) - @(zizA). 0 If 6 2 0, then assign zk+l = zb+l n e w .
0 If S < 0, then assign zk+' = zk:: with probability e6 or assign zk+' = Z' with probability (1 - e 6 ) .
5. DETERMINATION OF POSTERIOR PROBABILITY
In this section, we will derive the joint posterior prob- ability densities for AOAs, time delays and fade ampli- tudes for the S a S noise. From Bayes' theorem [9, lo], we can write the posterior probability density of the
334
![Page 3: [IEEE 1999 2nd Workshop on Signal Processing Advances in Wireless - Annapolis, MD, USA (9-12 May 1999)] 1999 2nd IEEE Workshop on Signal Processing Advances in Wireless Communications](https://reader043.fdocument.org/reader043/viewer/2022022201/5750a48a1a28abcf0cab232d/html5/page/3.jpg)
parameter vector z (which characterises both the sig- nal and noise models), given the data matrix X and the model order M , as
0.6
05-
0.4
where z = [z1 ... z p ] , p(z I M ) is the a priori probability density of the parameters, p(X I z , M ) is the likelihood function and p(X I M ) is the evidence. Let our parameter vector z be [e, T, b, r , U]. Here b, T and 8 are M x 1 vectors representing the fade am- plitude, delay and AOA components of M multipath signals respectively. U and r denote the sta.ndard de- viation vector and the scaling vector of the Gaussian mixture respectively. Then from (6) and (8), the like- lihood function for the received data can be written as
- - _ _ - _ - _ _ - - _ -._ -
-
where
-- MSE ol firs1 pslh
Assuming a uniform prior for 8 and r , and a Raleigh distribution (with unit variance) for fade amplitudes, we can write the negative logarithm of the posterior distribution of 8, 7 and b given all other parameters as
6. SIMULATION AND DISCUSSION Various simulations are performed to investigate the performance of our method and the results are com- pared with the numerically calculated CRLB. In this simulation, we use one BPSK signal which is modu- lated by a raised cosine pulse whose excess bandwidth 0.35. The modulation waveform is zero outside the in- terval [-3T 3T]. The symbol time T is normalised to one second. Simulations are carried out for two multi- ple paths with AOAs [3Oo;4O0], delays [0.5;1.5] and fade amplitudes [0.8;1]. We use a 20 symbols long training sequence and an oversampling rate of 5. The samples of time delays and AOAs are drawn using the Metropolis-Hasting algorithm. As we cannot ana- lytically integrate out the fade amplitudes as nuisance parameters, we are deriving samples for them together with other parameters and then ignore them at the end. The MSEs of the parameters are calculated for various characteristic exponent and dispersion parameters.
For each a (or y), we performed 50 (=P) Monte Carlo runs taking 1000 samples for each of the parameters. The MSE of the 8j is calculated as
l P 2 M S E ( S j ) = - ( S j - 8ji) where j = [ l , 21 i=l
(15)
In ( 15), Sj is the target AOA of the j t h signal and 8j.i is the estimated mean value for the AOA of the j t h signal at the ith Monte Carlo run.
6.1. Effect of LY on parameter estimation In order to study the effect of a on our estimation, we vary a while fixing the value of y at 0.2. Using (Pscys as the energy function, we use the above MCMC al- gorithm with 8 array elements. Figure (2) shows the behaviour of the MSE vs (Y of the AOA of both paths. Figure (3) shows the behaviour of the MSE of the time
1.31 , I
.i 1.1 ..
, -- MSE of tlret palh
MSE d second path
I 0.5 1 1.5 2
characteristic emonem
0.3
Figure 2. Effect of the a on AOA estimation
delay estimates vs a. As expected, the MSE is decreas- ing when the a is increased.
Figure 3. Effect of a on time delay estimation
335
![Page 4: [IEEE 1999 2nd Workshop on Signal Processing Advances in Wireless - Annapolis, MD, USA (9-12 May 1999)] 1999 2nd IEEE Workshop on Signal Processing Advances in Wireless Communications](https://reader043.fdocument.org/reader043/viewer/2022022201/5750a48a1a28abcf0cab232d/html5/page/4.jpg)
6.2. Effect of y on parameter estimation We have repeated the simulation for an SaS noise (0=1.3) using @sus as our energy function. The dis- persion factor y is varied from 0.1 to 1 to produce dif- ferent impulsive noise. The mean of the MSE of estimated AOA and time de- lay of the both paths vs * are plotted in figure (4) and figure (5) respectively. We can see from these figures that the MSEs are approaching the CRLB when y is decreased.
3 5 .i ’
.-- MSE - - CRLB
Figure 4. Effect of y on AOA estimation
x 10-
I --- MSE
CRLB 8 ;
Figure 5. Effect of y on time delay estimation
7. CONCLUSION
In this paper, we presented a Bayesian approach for joint estimation of AOAs and time delays of fading mul- tipath signals. Unlike the conventional subspace-based methods, this new Bayesian approach can be used with amialler number of received data to jointly extract the AOAs and the time delays of multipath signals in a- stable noise. We can also extend this idea to design a robust beamformer in impulsive noise environments where the AOAs of the multipath signals can be mod- elled as random variables to compensate for the move-
ments of the receiver and the transmitter in mobile communication systems.
REFERENCES
[l] C. B. Papadias M. C. Vanderveen and A. Paulraj, “Joint angle and delay estimation (jade) for multi- path signals arriving at an antenna array,” IEEE communications letter, vol. 1, no. 1, pp. 12-14, January 1997.
[a] M. C. Vanderveen Alll-Jan van der Veen and A. Paulraj, “Joint angle and delay estimation us- ing shift-invariance techniques,” IEEE Transca- tions on signal processing, pp. 1-14, 1997.
[3] M. Wax and A. Leshem, “Joint estimation of time delays and directions of arrival of multiple reflec- tions of aknown signal,” IEEE, pp. 2622-2625, 1996.
“TDE, DOA and re- lated parameter estimation problems in impulsive noise,” in Signal Processing Workshop o n Higher Order Statzsiics, July 1997, pp. 273-277.
[5] Min Shao and Chrysostomos L. Nikias, “Signal processing with fractional lower order moments: Stable processes and their applications,” Proceed- ings of the IEEE, vol. 81, no. 7, pp. 986-1009, July 1993.
[SI C. Molina E. E. Kuruoglu and W. J . Fitzgerald, “Approximation of a-stable probabilty densities using finite mixtures of gaussians,” in Proceedings of EUPSICO’98, September 1998.
[7] George A. Tsihrintzis and Chrysostomos L. Nikias, “Fast estimation of the parameters of alpha-stable impulsive interference,” IEEE Transactions on Signal Processing, vol. 44, no. 6, pp. 1492-1503, June 1996.
“Self-targeting candidates for Metropolis-Hasting algorithms,” Technical Report, Univeristy of Iowa and Colorado State University, Jan. 1998.
[9] J . J . K. 0 Ruanaidh and W. J . Fitzgerald, Numer- ical Bayesian methods applied to signal processing, Springer- Verlag, New York, Inc., 1996.
[lo] B. Kannan and W. J . Fitzgerald, “A numerical bayesian approach for doa and frequency estima- tion of exponential signlas in gaussian and non- gaussian noise,” in Ninth IEEE SP Workshop on Statistical Signal and Array Processing, September
[4] A. Swami and 5. Sadler,
[8] 0. Stramer and R. L. Tweedie,
1998, pp. 264-267.
336
Top Related