





γλώσσες
Σελίδες
Νομικός


Universitat Hamburg
MIN-FakultatDepartment Informatik
- Einfuhrung in die Robotik
Einfuhrung in die Robotik
Jianwei [email protected]
Universitat HamburgFakultat fur Mathematik, Informatik und NaturwissenschaftenDepartment Informatik
Technische Aspekte Multimodaler Systeme
16. Juni 2009
J. Zhang 296
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung Einfuhrung in die Robotik
Gliederung
Allgemeine InformationenEinfuhrungKoordinaten eines ManipulatorsKinematik-GleichungenKinematik-GleichungenInverse Kinematik von ManipulatorenDifferentielle Bewegungen mit homogenen TransformationenJacobi-Matrix eines ManipulatorsAufgabenbeschreibungRobotergrammierung auf drei EbenenTrajektoriegenerierungTrajektoriengenerierungEinfuhrung in RCCL
J. Zhang 297

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung Einfuhrung in die Robotik
Gliederung (cont.)
DynamikRoboterregelung
Klassifikation der Regelung von RoboterarmenGelenkregler des PUMA-RobotersInterne Sensorik von RoboternRegelungssystem eines RobotersLineare Regelung fur TrajektorienverfolgungModellbasierte Regelung fur TrajektorienverfolgungRegelung im Kartesischen RaumHybride Regelung der Kraft und Position
Programmierung auf Aufgabenebene und BahnplanungGrundlage zur Programmierung auf AufgabenebeneObjekt-Darstellung
J. Zhang 298
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung Einfuhrung in die Robotik
Gliederung (cont.)
Motivation der BahnplanungBewegungsplanungKonfiguration eines ArtefaktesPlanung geometrischer BahnenSichtbarkeitsgraphTangentengraphVoronoi-DiagrammHeuristische Suche
Programmierung auf Aufgabenebene und BahnplanungProgrammierung auf Aufgabenebene und BahnplanungArchitekturen sensorbasierter intelligenter SystemeAus- und Ruckblick
J. Zhang 299

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Klassifikation der Regelung von Roboterarmen Einfuhrung in die Robotik
Klassifikation der Regelung von Roboterarmen
Als reines Problem der Trajektorie-Verfolgung:
I Regelung im Gelenkraum: PID, plus modellbasierte.
I Regelung im Kartesischen Raum: Gelenk-basierend, uberKinematik-Berechnung oder uber inverse Jacobi-Berechnung.
I Adaptive Regelung: modell-bezogene adaptive Regelung,selbst-tunend.
Hybride Regelung von Kraft und Position: (aktuellesForschungsthema)
J. Zhang 300
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Klassifikation der Regelung von Roboterarmen Einfuhrung in die Robotik
Architektur des Regelungssystems von PUMA-Robotern - I
I Das gesamte System ist eine Hierarchie mit zwei Ebenen.
I Der DEC LSI-11 Rechner schickt alle 28ms neue Gelenk-Werte zurRegler-Interface.
I Die zu uberwindende Distanz wird in 32 (moglich auch in23 = 8, 24 = 16, 26 = 64, . . . ) Inkremente gleichmassig zerlegt und siewerden zum Gelenkregler weiter geschickt.
J. Zhang 301

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Gelenkregler des PUMA-Roboters Einfuhrung in die Robotik
Gelenkregler des PUMA-Roboters
I Die Gelenkregelung arbeitet dann in 0.875 ms Takt.
I Encoder werden als Positionssensor eingesetzt.
I Potentiometer werden fur grobe Positionsschatzung benutzt (nurPUMA-560).
I Kein Tachometer vorhanden. Gelenkgeschwindigkeit wird uber dieDifferenzierung der Gelenkpositionen geschatzt.
J. Zhang 302
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Gelenkregler des PUMA-Roboters Einfuhrung in die Robotik
Optische Encoder in einem Roboter
I Ein optischer Leser liest die Linien.
I Die Scheibe dreht sich wenn der Gelenkmotor sich bewegt (mit einemVerhaltnis 1:1 am Beispiel des PUMA-Roboters. Uber Getriebe ist dieGenauigkeit ca. 0.0001 Rad/Bit).
I Eine spezielle Linie wird als “Null-Anzeige” markiert.
J. Zhang 303

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Interne Sensorik von Robotern Einfuhrung in die Robotik
Interne Sensorik von Robotern
Die Sensoren befinden sich im Roboter und erfassen den internenZustand des Roboters, u.a. die aktuelle Position und Geschwindigkeitjedes Gelenkes.Positionsmesssyteme:Potentiometer,Drehimpulsgeber (Encoder),Winkelcodier,Resolver, ...Geschwindigkeitsmessung:Fur die direkte Geschwindigkeitsmessung an rotatorischen Gelenkenwerden haufig sogenannte Tachometer eingesetzt.
Indirekt lassen sich Geschwindigkeiten auch mit Positionsinformationen
bestimmen.
J. Zhang 304
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Interne Sensorik von Robotern Einfuhrung in die Robotik
Arbeitsprinzip eines Winkelgebers
J. Zhang 305

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Interne Sensorik von Robotern Einfuhrung in die Robotik
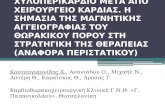
Arbeitsprinzip eines Resolvers (Drehmelders)
ASM Robotik
J. Zhang 306
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Interne Sensorik von Robotern Einfuhrung in die Robotik
Sensoren: Klassifikationshierarchie
J. Zhang 307

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Regelungssystem eines Roboters Einfuhrung in die Robotik
Regelungssystem eines Roboters
J. Zhang 308
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Regelungssystem eines Roboters Einfuhrung in die Robotik
Regelungssystem eines Roboters
Fuhrungsgroße:Θd(t),Θd(t),Θd(t).Fehlergroße:
E = Θd −Θ, E = Θd − Θ
Ausgangsgroße:Θ(t),Θ(t).Stellgroße:τ .
J. Zhang 309

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Regelungssystem eines Roboters Einfuhrung in die Robotik
Schaltung eines DC-Motors
Die Schaltung laßt sich mit einer differenziellen Gleichung erster Ordnungbeschreiben:
la ia + raia = va − ke θm
J. Zhang 310
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Regelungssystem eines Roboters Einfuhrung in die Robotik
Verbindung eines Motors mit einem Gelenk
Sei das Ubersetzungsverhaltnis η, dann gilt:
τm = (Im + I/η2)θm + (bm + b/η2)θm
wobei τm = kmia, Im und I jeweils die Massentragheit desMotor-Drehzylinders und der Last ist, und bm und b die Reibungsfaktorensind.Darstellung mit Gelenkvariablen:
τ = (Im + η2Im)θ + (bm + η2bm)θ
J. Zhang 311

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Lineare Regelung fur Trajektorienverfolgung Einfuhrung in die Robotik
Lineare Regelung fur Trajektorienverfolgung
f ′ = xd + kv e + kpe + ki
∫edt (26)
(26) wird als das Gesetz der PID-Regelung bezeichnet.
J. Zhang 312
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Lineare Regelung fur Trajektorienverfolgung Einfuhrung in die Robotik
P-, I- und D-Regler
P-Regler (Proportionalregler):τ(t) = kp · e(t). Der Verstarkungsfaktor kp bestimmt die Empfindlichkeit.
I-Regler (Integrator):
τ(t) = ki ·∫ t
t0e(t ′)dt ′. Langanhaltende Fehler werden dadurch
aufsummiert.
D-Regler (Differentialtor):τ(t) = kv · e(t). Dieser Regler zeigt eine empfindliche Reaktion aufzeitliche Anderungen der Regelabweichung.
Kombination ⇒ PID-Regler:
τ(t) = kp · e(t) + kv · e(t) + ki
∫ t
t0
e(t ′)dt ′
J. Zhang 313

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Modellbasierte Regelung fur Trajektorienverfolgung Einfuhrung in die Robotik
Modellbasierte Regelung fur Trajektorienverfolgung
Die dynamische Gleichung:
τ = M(Θ)Θ + V (Θ, Θ) + G (Θ)
wobei M(Θ) die lageabhagige n× n-Massenmatrix eines Manipulators ist,
V (Θ, Θ) ein n × 1-Vektor der Zentripetal- und Coriolis-Terme ist, und
G (Θ) eine komplizierte Funktion von Θ, die Position aller Gelenke des
Manipulators, ist.
J. Zhang 314
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Modellbasierte Regelung fur Trajektorienverfolgung Einfuhrung in die Robotik
Wie Regelt man Roboter besser?
Forschung:
Modell-basierte Regelung,
adaptive Regelung
Regelungssysteme der Industrieroboter:
PID-Regelung + Schwerkraft-Kompensation:
τ = Θd + Kv E + KpE + Ki
∫Edt + G (Θ)
J. Zhang 315

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Regelung im Kartesischen Raum Einfuhrung in die Robotik
Regelung im Kartesischen Raum - Verfahren I
Gelenk-basierte Regelung mit Kartesischen Bahneingangen:
J. Zhang 316
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Regelung im Kartesischen Raum Einfuhrung in die Robotik
Regelung im Kartesischen Raum - Verfahren II
Kartesische Regelung uber Kinematik-Berechnung:
J. Zhang 317

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Regelung im Kartesischen Raum Einfuhrung in die Robotik
Regelung im Kartesischen Raum - Verfahren III
Kartesische Regelung uber inverse Jacobi-Berechnung:
J. Zhang 318
Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Hybride Regelung der Kraft und Position Einfuhrung in die Robotik
Hybride Regelung der Kraft und Position
Bei manchen Aufgaben mussen sowohl Position als auch Kraft aufdem Endeffektor geregelt werden: Montage, Abschleifen,Tur-Offnen und Schließen, Kurbel-Drehung ...
J. Zhang 319

Universitat Hamburg
MIN-FakultatDepartment Informatik
Roboterregelung - Hybride Regelung der Kraft und Position Einfuhrung in die Robotik
Hybride Regelung der Kraft und Position
Ein Verfahren zur Kraftregelung:
Zwei Ruckkopplungsschleife fur separate Regelung von Positionund Kraft.
J. Zhang 320
Top Related