





γλώσσες
Σελίδες
Νομικός


Closed magnetic geodesics on Riemann surfaces
Matthias Schneider
Mathematisches InstitutUniversity of Heidelberg
April 8. 2011, Sevilla

The problemGiven
I an oriented (compact) surface (M, g) with a Riemannianmetric g ,
I a smooth (positive) function k : M → R.
Problem: Existence of a closed immersed curve γ : S1 → M withgeodesic curvature kg (γ, t) = k(γ(t)).
I Geodesic curvature:kg (γ, t) := |γ(t)|−3g 〈Dt,g γ(t), Jg (γ(t))γ(t)〉,Jg (p): rotation by +π/2 in TpM w.r.t. the given orientationand metric.
I These curves are called magnetic geodesics. Theycorrespond to trajectories of a charged particle on M in amagnetic field with magnetic form kdµg and solve
Dt,g γ = |γ|gk(γ)Jg (γ)γ.

The problemGiven
I an oriented (compact) surface (M, g) with a Riemannianmetric g ,
I a smooth (positive) function k : M → R.
Problem: Existence of a closed immersed curve γ : S1 → M withgeodesic curvature kg (γ, t) = k(γ(t)).
I Geodesic curvature:kg (γ, t) := |γ(t)|−3g 〈Dt,g γ(t), Jg (γ(t))γ(t)〉,Jg (p): rotation by +π/2 in TpM w.r.t. the given orientationand metric.
I These curves are called magnetic geodesics. Theycorrespond to trajectories of a charged particle on M in amagnetic field with magnetic form kdµg and solve
Dt,g γ = |γ|gk(γ)Jg (γ)γ.

The problemGiven
I an oriented (compact) surface (M, g) with a Riemannianmetric g ,
I a smooth (positive) function k : M → R.
Problem: Existence of a closed immersed curve γ : S1 → M withgeodesic curvature kg (γ, t) = k(γ(t)).
I Geodesic curvature:kg (γ, t) := |γ(t)|−3g 〈Dt,g γ(t), Jg (γ(t))γ(t)〉,Jg (p): rotation by +π/2 in TpM w.r.t. the given orientationand metric.
I These curves are called magnetic geodesics. Theycorrespond to trajectories of a charged particle on M in amagnetic field with magnetic form kdµg and solve
Dt,g γ = |γ|gk(γ)Jg (γ)γ.

The spherical geometry
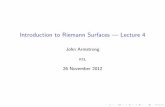
Example 1: The round sphere (S2, g0) with k ≡ k0.
I S2 = ∂B1(0) ⊂ R3
I g0 induced metric
I Gauss curvatureKg0 ≡ 1
I Magnetic geodesicswith k0 = 1.

The spherical geometry
Example 1: The round sphere (S2, g0) with k ≡ k0.
I S2 = ∂B1(0) ⊂ R3
I g0 induced metric
I Gauss curvatureKg0 ≡ 1
I Magnetic geodesicswith k0 = 1.

The spherical geometry
Example 1: The round sphere (S2, g0) with k ≡ k0.
I S2 = ∂B1(0) ⊂ R3
I g0 induced metric
I Gauss curvatureKg0 ≡ 1
I Magnetic geodesicswith k0 = 1.

The spherical geometry
Example 1: The round sphere (S2, g0) with k ≡ k0.
I S2 = ∂B1(0) ⊂ R3
I g0 induced metric
I Gauss curvatureKg0 ≡ 1
I Magnetic geodesicswith k0 = 1.

The hyperbolic geometry
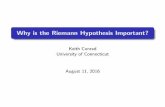
Example 2: The hyperbolic plane (H, gH) with k ≡ k0.
I H = B1(0) ⊂ R2
I gH =4(1− |x |2)−2gR2
I Gauss curvatureKgH ≡ −1
I Magnetic geodesicsfor k0 = 2

The hyperbolic geometry
Example 2: The hyperbolic plane (H, gH) with k ≡ k0.
I H = B1(0) ⊂ R2
I gH =4(1− |x |2)−2gR2
I Gauss curvatureKgH ≡ −1
I Magnetic geodesicsfor k0 = 2

The hyperbolic geometry
Example 2: The hyperbolic plane (H, gH) with k ≡ k0.
I H = B1(0) ⊂ R2
I gH =4(1− |x |2)−2gR2
I Gauss curvatureKgH ≡ −1
I Magnetic geodesicsfor k0 = 2

The hyperbolic geometry
Example 2: The hyperbolic plane (H, gH) with k ≡ k0.
I H = B1(0) ⊂ R2
I gH =4(1− |x |2)−2gR2
I Gauss curvatureKgH ≡ −1
I Magnetic geodesicsfor k0 = 2

The hyperbolic geometry
Example 2: The hyperbolic plane (H, gH) with k ≡ k0.
I H = B1(0) ⊂ R2
I gH =4(1− |x |2)−2gR2
I Gauss curvatureKgH ≡ −1
I Magnetic geodesicsfor k0 = 2

The hyperbolic geometry
Example 2: The hyperbolic plane (H, gH) with k ≡ k0.
I H = B1(0) ⊂ R2
I gH =4(1− |x |2)−2gR2
I Gauss curvatureKgH ≡ −1
I Magnetic geodesicsfor k0 = 2

Methods and approaches
There is a vast literature on the existence of closed magneticgeodesics.
I Theory of dynamical systems: Arnold ’86, Ginzburg ’96Magnetic geodesics are periodic orbits of a twistedHamiltonian flow withH = 1
2 |q|2, twisted symplectic form ω = −dλ+ π∗(kµg ),
π : TM → M, µg volume form, λ canonical 1-form (qdq).
I Morse-Novikov theory: Novikov ’84, Taimanov ’92Minimize E (γ) := 1
2
∫S1 |γ|2 + ”
∫B kµg” where ∂B = γ.
If dθ = kµg , then ”∫B kµg” =
∫γ θ.
In general, the functional E is multi-valued.
I Aubry-Mather-Theorie: Contreras, Macarini, Paternain ’04Mane’s critical value, existence on compact surfaces, if kµg isexact.

Methods and approaches
There is a vast literature on the existence of closed magneticgeodesics.
I Theory of dynamical systems: Arnold ’86, Ginzburg ’96Magnetic geodesics are periodic orbits of a twistedHamiltonian flow withH = 1
2 |q|2, twisted symplectic form ω = −dλ+ π∗(kµg ),
π : TM → M, µg volume form, λ canonical 1-form (qdq).
I Morse-Novikov theory: Novikov ’84, Taimanov ’92Minimize E (γ) := 1
2
∫S1 |γ|2 + ”
∫B kµg” where ∂B = γ.
If dθ = kµg , then ”∫B kµg” =
∫γ θ.
In general, the functional E is multi-valued.
I Aubry-Mather-Theorie: Contreras, Macarini, Paternain ’04Mane’s critical value, existence on compact surfaces, if kµg isexact.

Methods and approaches
There is a vast literature on the existence of closed magneticgeodesics.
I Theory of dynamical systems: Arnold ’86, Ginzburg ’96Magnetic geodesics are periodic orbits of a twistedHamiltonian flow withH = 1
2 |q|2, twisted symplectic form ω = −dλ+ π∗(kµg ),
π : TM → M, µg volume form, λ canonical 1-form (qdq).
I Morse-Novikov theory: Novikov ’84, Taimanov ’92Minimize E (γ) := 1
2
∫S1 |γ|2 + ”
∫B kµg” where ∂B = γ.
If dθ = kµg , then ”∫B kµg” =
∫γ θ.
In general, the functional E is multi-valued.
I Aubry-Mather-Theorie: Contreras, Macarini, Paternain ’04Mane’s critical value, existence on compact surfaces, if kµg isexact.

Methods and approaches
There is a vast literature on the existence of closed magneticgeodesics.
I Theory of dynamical systems: Arnold ’86, Ginzburg ’96Magnetic geodesics are periodic orbits of a twistedHamiltonian flow withH = 1
2 |q|2, twisted symplectic form ω = −dλ+ π∗(kµg ),
π : TM → M, µg volume form, λ canonical 1-form (qdq).
I Morse-Novikov theory: Novikov ’84, Taimanov ’92Minimize E (γ) := 1
2
∫S1 |γ|2 + ”
∫B kµg” where ∂B = γ.
If dθ = kµg , then ”∫B kµg” =
∫γ θ.
In general, the functional E is multi-valued.
I Aubry-Mather-Theorie: Contreras, Macarini, Paternain ’04Mane’s critical value, existence on compact surfaces, if kµg isexact.

Open problems
I Conjecture (*1): (Arnold ’81)If (M, g) is compact oriented surface and k is positive, thenthere is a closed k-magnetic geodesic.More precisely, there are at least two for M = S2 and at leastthree in all other cases.
I Arnold ’84: (*1) is true for a flat torus (T 2, g0).I Ginzburg ’96: (*1) is true for (M, g), if k >>> 1.
existence, if 0 < k <<< 1.I (*1) is wrong for (H/Γ, g0) with Kg0 ≡ −1 and k ≡ 1.
”Horocycle flow”, Hedlund ’36, Ginzburg ’96
I Conjecture (*2): Novikov ’82, Rosenberg and Smith ’10On (S2, g) with k positive, there is an embedded closedk-magnetic geodesic.

Open problems
I Conjecture (*1): (Arnold ’81)If (M, g) is compact oriented surface and k is positive, thenthere is a closed k-magnetic geodesic.More precisely, there are at least two for M = S2 and at leastthree in all other cases.
I Arnold ’84: (*1) is true for a flat torus (T 2, g0).I Ginzburg ’96: (*1) is true for (M, g), if k >>> 1.
existence, if 0 < k <<< 1.I (*1) is wrong for (H/Γ, g0) with Kg0 ≡ −1 and k ≡ 1.
”Horocycle flow”, Hedlund ’36, Ginzburg ’96
I Conjecture (*2): Novikov ’82, Rosenberg and Smith ’10On (S2, g) with k positive, there is an embedded closedk-magnetic geodesic.

Open problems
I Conjecture (*1): (Arnold ’81)If (M, g) is compact oriented surface and k is positive, thenthere is a closed k-magnetic geodesic.More precisely, there are at least two for M = S2 and at leastthree in all other cases.
I Arnold ’84: (*1) is true for a flat torus (T 2, g0).I Ginzburg ’96: (*1) is true for (M, g), if k >>> 1.
existence, if 0 < k <<< 1.I (*1) is wrong for (H/Γ, g0) with Kg0 ≡ −1 and k ≡ 1.
”Horocycle flow”, Hedlund ’36, Ginzburg ’96
I Conjecture (*2): Novikov ’82, Rosenberg and Smith ’10On (S2, g) with k positive, there is an embedded closedk-magnetic geodesic.

Results
I (*1) is true for (S2, g), if Kg ≥ 0 and k > 0, i.e. there are twoclosed k-magnetic geodesics in this case. (S. ’10)
I There is a closed k-magnetic geodesic, if χ(M) < 0, Kg ≥ −1and k > 1. (S. ’10)
I (*2) holds for (S2, g), i.e. there are two closed embeddedk-magnetic geodesics, under each of the following threeassumptions:
1. k > 0 and g is 14 -pinched (sup Kg < 4 inf Kg ), (S. ’09)
2. k is large enough depending on g . (S. ’09)
3. Kg > 0 and k is small enough depending on g . (Rosenberg &S. ’11)

Results
I (*1) is true for (S2, g), if Kg ≥ 0 and k > 0, i.e. there are twoclosed k-magnetic geodesics in this case. (S. ’10)
I There is a closed k-magnetic geodesic, if χ(M) < 0, Kg ≥ −1and k > 1. (S. ’10)
I (*2) holds for (S2, g), i.e. there are two closed embeddedk-magnetic geodesics, under each of the following threeassumptions:
1. k > 0 and g is 14 -pinched (sup Kg < 4 inf Kg ), (S. ’09)
2. k is large enough depending on g . (S. ’09)
3. Kg > 0 and k is small enough depending on g . (Rosenberg &S. ’11)

Results
I (*1) is true for (S2, g), if Kg ≥ 0 and k > 0, i.e. there are twoclosed k-magnetic geodesics in this case. (S. ’10)
I There is a closed k-magnetic geodesic, if χ(M) < 0, Kg ≥ −1and k > 1. (S. ’10)
I (*2) holds for (S2, g), i.e. there are two closed embeddedk-magnetic geodesics, under each of the following threeassumptions:
1. k > 0 and g is 14 -pinched (sup Kg < 4 inf Kg ), (S. ’09)
2. k is large enough depending on g . (S. ’09)
3. Kg > 0 and k is small enough depending on g . (Rosenberg &S. ’11)

Results
I (*1) is true for (S2, g), if Kg ≥ 0 and k > 0, i.e. there are twoclosed k-magnetic geodesics in this case. (S. ’10)
I There is a closed k-magnetic geodesic, if χ(M) < 0, Kg ≥ −1and k > 1. (S. ’10)
I (*2) holds for (S2, g), i.e. there are two closed embeddedk-magnetic geodesics, under each of the following threeassumptions:
1. k > 0 and g is 14 -pinched (sup Kg < 4 inf Kg ), (S. ’09)
2. k is large enough depending on g . (S. ’09)
3. Kg > 0 and k is small enough depending on g . (Rosenberg &S. ’11)

Results
I (*1) is true for (S2, g), if Kg ≥ 0 and k > 0, i.e. there are twoclosed k-magnetic geodesics in this case. (S. ’10)
I There is a closed k-magnetic geodesic, if χ(M) < 0, Kg ≥ −1and k > 1. (S. ’10)
I (*2) holds for (S2, g), i.e. there are two closed embeddedk-magnetic geodesics, under each of the following threeassumptions:
1. k > 0 and g is 14 -pinched (sup Kg < 4 inf Kg ), (S. ’09)
2. k is large enough depending on g . (S. ’09)
3. Kg > 0 and k is small enough depending on g . (Rosenberg &S. ’11)

Results
I (*1) is true for (S2, g), if Kg ≥ 0 and k > 0, i.e. there are twoclosed k-magnetic geodesics in this case. (S. ’10)
I There is a closed k-magnetic geodesic, if χ(M) < 0, Kg ≥ −1and k > 1. (S. ’10)
I (*2) holds for (S2, g), i.e. there are two closed embeddedk-magnetic geodesics, under each of the following threeassumptions:
1. k > 0 and g is 14 -pinched (sup Kg < 4 inf Kg ), (S. ’09)
2. k is large enough depending on g . (S. ’09)
3. Kg > 0 and k is small enough depending on g . (Rosenberg &S. ’11)

Hopf tori in S3
Following Barros, Ferrandez, Lucas ’99 we consider
S3 = (z1, z2) : z1, z2 ∈ C, |z1|2 + |z2|2 = 4
and the Hopf map H : S3 → S2 defined by
H(z1, z2) :=1
4
(|z1|2 − |z2|2, 2z1z2
)∈ ∂B1(0) ⊂ R3.
For any metric metric g on S2, we define a metric g on S3 by
g(V ,W ) := H∗g(V ,W ) + θ(V )θ(W ),
where θ|x(V ) := 12〈ix ,V 〉R4 .
If γ is a closed (embedded) curve in S2, then H−1(γ) is a flat(embedded) torus in S3 with mean curvature
HgH−1(γ(t)) =
1
2kg (γ, t).

Hopf tori in S3
Consequently we find
I Given k : S2 → R positive, then there are two embedded toriin the round S3 with prescribed mean curvature k H.
I Given a 14 -pinched metric g on S2 and c > 0, then there are
two embedded tori in (S3, g) with constant mean curvature c .

An outline of the proof
Closed k-magnetic geodesics correspond to zeros of the vector fieldXg ,k on H2,2(S1,M) given by
Xk,g (γ) := (−D2t,g + 1)−1
(− Dt,g γ + |γ|gJg (γ)γ
).
Note that
TγH2,2(S1,M) = Periodic H2,2 − vector fields along γ.
For θ ∈ S1 = R/Z consider the action on H2,2(S1,M) defined by
(θ ∗ γ)(t) := γ(t + θ).
The vector field Xk,g is invariant under the S1-action and any zerocomes along with a S1 orbit of zeros.

An outline of the proof
I Step 1: Count zero orbits, i.e. define a S1-degree.
I Step 2: Compute the S1-degree in an unperturbed situation.e.g. constant curvature and k .
I Step 3: Prove compactness of the set of zero orbits and use ahomotopy argument.

An outline of the proof
I Step 1: Count zero orbits, i.e. define a S1-degree.
I Step 2: Compute the S1-degree in an unperturbed situation.e.g. constant curvature and k .
I Step 3: Prove compactness of the set of zero orbits and use ahomotopy argument.

An outline of the proof
I Step 1: Count zero orbits, i.e. define a S1-degree.
I Step 2: Compute the S1-degree in an unperturbed situation.e.g. constant curvature and k .
I Step 3: Prove compactness of the set of zero orbits and use ahomotopy argument.

Step 1: The S1-degree
We follow the degree theory of Tromba ’78 and give aS1-equivariant version. To this end we note:
I Fix a zero γ of Xk,g . By standard regularity results γ is inH4,2(S1,M) and the map θ 7→ θ ∗ γ is C 2 from S1 toH2,2(S1,M). Hence, γ is in the kernel of DgXk,g |γ .
I Define a vector field Wg on H2,2(S1,M) by
Wg (γ) = (−(Dt,g )2 + 1)−1γ.
The vector field Xk,g is orthogonal to Wg . Consequently,
DgXk,g |γ : TγH2,2(S1,M)→ 〈Wg (γ)〉⊥.
Note that γ /∈ 〈Wg (γ)〉⊥.

Step 1: The S1-degree
We follow the degree theory of Tromba ’78 and give aS1-equivariant version. To this end we note:
I Fix a zero γ of Xk,g . By standard regularity results γ is inH4,2(S1,M) and the map θ 7→ θ ∗ γ is C 2 from S1 toH2,2(S1,M). Hence, γ is in the kernel of DgXk,g |γ .
I Define a vector field Wg on H2,2(S1,M) by
Wg (γ) = (−(Dt,g )2 + 1)−1γ.
The vector field Xk,g is orthogonal to Wg . Consequently,
DgXk,g |γ : TγH2,2(S1,M)→ 〈Wg (γ)〉⊥.
Note that γ /∈ 〈Wg (γ)〉⊥.

Step 1: The S1-degree
DefinitionThe zero orbit S1 ∗ γ is called nondegenerate, if
DgXk,g |γ : 〈Wg (γ)〉⊥ −→ 〈Wg (γ)〉⊥
is an isomorphism.
DefinitionWe define the local S1-degree of a nondegenerate zero orbit S1 ∗ γby
degloc,S1(Xk,g ,S1 ∗ γ) := sgnDgXk,g |γ ,
where sgnDgXk,g |γ denotes the usual Leray-Schauder degree.Note that the map DgXk,g |γ is of the form identity − compact.

Step 1: The S1-degree
Let M be an open S1-invariant subset of curves in H2,2(S1,M).We assume that Xk,g is proper in M, i.e.
γ ∈M : Xk,g (γ) = 0
is compact.Using an equivariant version of the Sard-Smale lemma, theS1-degree χS1(Xk,g ,M) ∈ Z is defined by
χS1(Xk,g ,M) :=∑
S1∗γ⊂M whereYk,g (S1∗γ)=0
degloc,S1(Yk,g , S1 ∗ γ),
where Yk,g is a small perturbation of Xk,g with only finitely manycritical orbits in M, that are all nondegenerate.

The Poincare map
Let S1 ∗ γ be an isolated zero orbit of Xk,g and consider thecorresponding periodic orbit in the unit tangent bundle
Σ1M := (x ,V ) ∈ TM : |V |g = 1.
We fix a transversal section E in Σ1M at the pointθ := (γ(0), |γ(0)|−1γ(0)) and denote by P : B1 ∩ E → B2 ∩ E thePoincare map, where B1, B2 are open neighborhoods of θ.
Lemma (S. ’09, Nikishin ’74, Simon ’74)
Under the above assumptions θ is an isolated fixed point of P andthere holds
degloc,S1(Xk,g , S1 ∗ γ) = −i(P, θ) ≥ −1,
where i(P, θ) denotes the index of the isolated fixed point θ.

Step 2: Computation of the S1 degree
Fix (M, g0) with a constant curvature metric g0 andk0 > 0 , if M = S2
k0 >> 1, if M 6= S2,
and consider the set of curves
MA := γ ∈ H2,2(S1,M) : γ 6= 0, γ is Alexandrov embedded.
and additionally for M = S2
ME := γ ∈ H2,2(S1, S2) : γ 6= 0, γ is embedded.
Then the set of zero orbits in MA as well as in ME is parametrizedby M.

Step 2: Computation of the S1 degree
To compute the S1-degree, choose a Morse function k1 on M andreplace k0 by k0 + εk1.As ε→ 0+ we find
I To every critical point w ∈ M of k1 corresponds exactly onezero orbit S1 ∗ γw of Xk0+εk1,g0 .
I degloc,S1(Xk0+εk1,g0 ,S1 ∗ γw ) = − degloc,S1(∇k1,w).
I These are all zero orbits in MA or ME .
Hence
χS1(Xk0,g0 ,ME ) = χS1(Xk0,g0 ,MA)
= χS1(Xk0+εk1,g0 ,MA) = −χ(M).

Step 2: Computation of the S1 degree
To compute the S1-degree, choose a Morse function k1 on M andreplace k0 by k0 + εk1.As ε→ 0+ we find
I To every critical point w ∈ M of k1 corresponds exactly onezero orbit S1 ∗ γw of Xk0+εk1,g0 .
I degloc,S1(Xk0+εk1,g0 , S1 ∗ γw ) = − degloc,S1(∇k1,w).
I These are all zero orbits in MA or ME .
Hence
χS1(Xk0,g0 ,ME ) = χS1(Xk0,g0 ,MA)
= χS1(Xk0+εk1,g0 ,MA) = −χ(M).

Step 2: Computation of the S1 degree
To compute the S1-degree, choose a Morse function k1 on M andreplace k0 by k0 + εk1.As ε→ 0+ we find
I To every critical point w ∈ M of k1 corresponds exactly onezero orbit S1 ∗ γw of Xk0+εk1,g0 .
I degloc,S1(Xk0+εk1,g0 , S1 ∗ γw ) = − degloc,S1(∇k1,w).
I These are all zero orbits in MA or ME .
Hence
χS1(Xk0,g0 ,ME ) = χS1(Xk0,g0 ,MA)
= χS1(Xk0+εk1,g0 ,MA) = −χ(M).

Step 2: Computation of the S1 degree
To compute the S1-degree, choose a Morse function k1 on M andreplace k0 by k0 + εk1.As ε→ 0+ we find
I To every critical point w ∈ M of k1 corresponds exactly onezero orbit S1 ∗ γw of Xk0+εk1,g0 .
I degloc,S1(Xk0+εk1,g0 , S1 ∗ γw ) = − degloc,S1(∇k1,w).
I These are all zero orbits in MA or ME .
Hence
χS1(Xk0,g0 ,ME ) = χS1(Xk0,g0 ,MA)
= χS1(Xk0+εk1,g0 ,MA) = −χ(M).

Step 3: Compactness
A priori estimates: Fix (M, g) and γ ∈MA, i.e. there is animmersion F : B → M such that γ = F (∂B).Gauss-Bonnet applied to (B,F ∗g) yields
2π =
∫B
KF∗gdVF∗g +
∫∂B
kF∗gdSF∗g
≥ min(Kg )vol(B) +
∫γ
kgdSg
≥ min(Kg )vol(B) + L(γ) min(k)
I If Kg ≥ 0, then L(γ) ≤ 2π(min(k))−1.
I If Kg ≡ −1, then the (hyperbolic) isoperimetric inequalitygives L(γ) ≥ vol(B). Hence L(γ) ≤ 2π(min(k)− 1)−1.For the general case Kg ≥ −1 we use a conformal change ofthe metric in B.

Step 3: Compactness
A priori estimates: Fix (M, g) and γ ∈MA, i.e. there is animmersion F : B → M such that γ = F (∂B).Gauss-Bonnet applied to (B,F ∗g) yields
2π =
∫B
KF∗gdVF∗g +
∫∂B
kF∗gdSF∗g
≥ min(Kg )vol(B) +
∫γ
kgdSg
≥ min(Kg )vol(B) + L(γ) min(k)
I If Kg ≥ 0, then L(γ) ≤ 2π(min(k))−1.
I If Kg ≡ −1, then the (hyperbolic) isoperimetric inequalitygives L(γ) ≥ vol(B). Hence L(γ) ≤ 2π(min(k)− 1)−1.For the general case Kg ≥ −1 we use a conformal change ofthe metric in B.

Step 3: Compactness
A priori estimates: Fix (M, g) and γ ∈MA, i.e. there is animmersion F : B → M such that γ = F (∂B).Gauss-Bonnet applied to (B,F ∗g) yields
2π =
∫B
KF∗gdVF∗g +
∫∂B
kF∗gdSF∗g
≥ min(Kg )vol(B) +
∫γ
kgdSg
≥ min(Kg )vol(B) + L(γ) min(k)
I If Kg ≥ 0, then L(γ) ≤ 2π(min(k))−1.
I If Kg ≡ −1, then the (hyperbolic) isoperimetric inequalitygives L(γ) ≥ vol(B). Hence L(γ) ≤ 2π(min(k)− 1)−1.For the general case Kg ≥ −1 we use a conformal change ofthe metric in B.

Step 3: Compactness
This yields compactness in MA, because the limit of Alexandrovembedded locally convex curves remains Alexandrov embedded.Using the homotopy invariance of the S1-degree, we find
−χ(M) = χS1(Xk0,g0 ,MA) = χS1(Xk,g ,MA).
In particular, if M = S2, the S1-degree is −2.Since the local S1-degree of an isolated zero orbit is greater thanor equal to −1, there are at least two zero orbits.

Step 3: Compactness
We consider M = S2 and embedded in curves in ME .
I To obtain a contradiction, assume there are embedded curvesconverging to γ0, which has positive geodesic curvature and isnot embedded.
I Let (Ω0, g) be the interior of γ0 considered as a Riemanniansurface with boundary. Fix a touching point γ0(s1) = γ0(s2).The point γ0(s1) = γ0(s2) corresponds to two differentboundary points of Ω0.
I Let β be the curve of minimal length in Ω0 connecting thetwo boundary points.
I By the maximum principle β cannot touch the boundary of Ω0
and is therefore a geodesic in the interior of Ω0.
I Thus, β is a stable geodesic loop in S2.

Step 3: Compactness
We consider M = S2 and embedded in curves in ME .
I To obtain a contradiction, assume there are embedded curvesconverging to γ0, which has positive geodesic curvature and isnot embedded.
I Let (Ω0, g) be the interior of γ0 considered as a Riemanniansurface with boundary. Fix a touching point γ0(s1) = γ0(s2).The point γ0(s1) = γ0(s2) corresponds to two differentboundary points of Ω0.
I Let β be the curve of minimal length in Ω0 connecting thetwo boundary points.
I By the maximum principle β cannot touch the boundary of Ω0
and is therefore a geodesic in the interior of Ω0.
I Thus, β is a stable geodesic loop in S2.

Step 3: Compactness
We consider M = S2 and embedded in curves in ME .
I To obtain a contradiction, assume there are embedded curvesconverging to γ0, which has positive geodesic curvature and isnot embedded.
I Let (Ω0, g) be the interior of γ0 considered as a Riemanniansurface with boundary. Fix a touching point γ0(s1) = γ0(s2).The point γ0(s1) = γ0(s2) corresponds to two differentboundary points of Ω0.
I Let β be the curve of minimal length in Ω0 connecting thetwo boundary points.
I By the maximum principle β cannot touch the boundary of Ω0
and is therefore a geodesic in the interior of Ω0.
I Thus, β is a stable geodesic loop in S2.

Step 3: Compactness
We consider M = S2 and embedded in curves in ME .
I To obtain a contradiction, assume there are embedded curvesconverging to γ0, which has positive geodesic curvature and isnot embedded.
I Let (Ω0, g) be the interior of γ0 considered as a Riemanniansurface with boundary. Fix a touching point γ0(s1) = γ0(s2).The point γ0(s1) = γ0(s2) corresponds to two differentboundary points of Ω0.
I Let β be the curve of minimal length in Ω0 connecting thetwo boundary points.
I By the maximum principle β cannot touch the boundary of Ω0
and is therefore a geodesic in the interior of Ω0.
I Thus, β is a stable geodesic loop in S2.

Step 3: Compactness
We consider M = S2 and embedded in curves in ME .
I To obtain a contradiction, assume there are embedded curvesconverging to γ0, which has positive geodesic curvature and isnot embedded.
I Let (Ω0, g) be the interior of γ0 considered as a Riemanniansurface with boundary. Fix a touching point γ0(s1) = γ0(s2).The point γ0(s1) = γ0(s2) corresponds to two differentboundary points of Ω0.
I Let β be the curve of minimal length in Ω0 connecting thetwo boundary points.
I By the maximum principle β cannot touch the boundary of Ω0
and is therefore a geodesic in the interior of Ω0.
I Thus, β is a stable geodesic loop in S2.

Step 3: Compactness
Consequently, if ME is not compact, then there is a stablegeodesic loop β inside Ω0 ⊂ S2.Hence
I inj(g) ≤ 12L(β) < 1
4L(γ0), a contradiction if k >> 1.
I If Kg > 0 then from Klingenberg ’78 and Bonnet-Meyer
π(
sup Kg
)− 12 ≤ inj(g) ≤ 1
2L(β) ≤ 1
2π(
inf Kg
)− 12 ,
a contradiction, if g is 1/4-pinched.

Step 3: Compactness
Consequently, if ME is not compact, then there is a stablegeodesic loop β inside Ω0 ⊂ S2.Hence
I inj(g) ≤ 12L(β) < 1
4L(γ0), a contradiction if k >> 1.
I If Kg > 0 then from Klingenberg ’78 and Bonnet-Meyer
π(
sup Kg
)− 12 ≤ inj(g) ≤ 1
2L(β) ≤ 1
2π(
inf Kg
)− 12 ,
a contradiction, if g is 1/4-pinched.

The Legendrian Seifert conjecture
Closed magnetic geodesics correspond to periodic trajectories of avector field Φ on the unit tangent bundle of (S2, g)
Σ1S2 := (x ,V ) ∈ TS2 : |V |g = 1 ∼= RP3 1:2←−− S3
Lift Φ to a vector field Φ on S3.

The Legendrian Seifert conjecture
I Seifert 1950: Exists a vector field on S3 without periodic orbit?
I Kuperberg 1994: There is a smooth vector field on S3 withoutperiodic orbit.
I Hofer 1993: Every Reeb vector field V on (S3, λ) has aperiodic orbit.contact structure: λ ∧ dλ 6= 0, Reeb vector field: dλ(V , ·) = 0and λ(V ) = 1. (Weinstein conjecture, Taubes 2007.)
I Φ is Legendrian for the (standard) contact structure λ liftedfrom Σ1S2, i.e. λ(Φ) = 0.
I Open question: Existence of periodic orbits of Legendrianvector fields on S3 (with standard contact structure)?

The Legendrian Seifert conjecture
I Seifert 1950: Exists a vector field on S3 without periodic orbit?
I Kuperberg 1994: There is a smooth vector field on S3 withoutperiodic orbit.
I Hofer 1993: Every Reeb vector field V on (S3, λ) has aperiodic orbit.contact structure: λ ∧ dλ 6= 0, Reeb vector field: dλ(V , ·) = 0and λ(V ) = 1. (Weinstein conjecture, Taubes 2007.)
I Φ is Legendrian for the (standard) contact structure λ liftedfrom Σ1S2, i.e. λ(Φ) = 0.
I Open question: Existence of periodic orbits of Legendrianvector fields on S3 (with standard contact structure)?

The Legendrian Seifert conjecture
I Seifert 1950: Exists a vector field on S3 without periodic orbit?
I Kuperberg 1994: There is a smooth vector field on S3 withoutperiodic orbit.
I Hofer 1993: Every Reeb vector field V on (S3, λ) has aperiodic orbit.contact structure: λ ∧ dλ 6= 0, Reeb vector field: dλ(V , ·) = 0and λ(V ) = 1. (Weinstein conjecture, Taubes 2007.)
I Φ is Legendrian for the (standard) contact structure λ liftedfrom Σ1S2, i.e. λ(Φ) = 0.
I Open question: Existence of periodic orbits of Legendrianvector fields on S3 (with standard contact structure)?
Top Related