





γλώσσες
Σελίδες
Νομικός

Traitement du Signal Imprimé le 07/01/09 65
Université Paris-Sud
ORSAYDépartement Mesures Physiques
Année 2003-04
Cours de Traitement du SignalPartie 3
Application au filtrage numérique
Roger REYNAUD
tempsfréquences
e 2πj ν t
δ(f-ν)
Réel
Imaginaire
Réel
Imaginaire
La figure symbolise la transformation de Fourierpermettant de passer d'une représentationtemporelle complexe (ici la fonction de base del’analyse en diagramme de Bode en analogique) àune représentation fréquentielle complexeéquivalente
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
66 Département Mesures physiques IUT Orsay
Plan du cours
Partie 1
• Transformation Temps Fréquence
Partie 2
Signal continu Signal échantillonné
Partie 3
•Application au filtrage numérique
Analogique NumériqueFiltrage numérique................................................................... 67
Chaîne de traitement numérique.....................................................................67Transmittance en z..........................................................................................68Filtres numériques non récursifs.....................................................................68Filtres numériques récursifs............................................................................69Stabilité d'un filtre numérique récursif ...........................................................70Exemple : intégrateur numérique ...................................................................72Exemple de filtre passe-bas.............................................................................74
Synthèse de filtres numériques .................................................. 75Filtres non récursifs à phase linéaire...............................................................75Méthode avec échantillonnage de la réponse impulsionnelle.........................75Méthode avec échantillons en fréquence dans un gabarit ..............................78Filtres récursifs................................................................................................79Synthèse à partir d'une équation différentielle du 2ème ordre .......................79Synthèse à partir de filtre prototype et transformation bilinéaire...................80Exemple d'un passe-bande étroit.....................................................................82
Régulateur numérique............................................................... 84CNA et présence d’un bloqueur .....................................................................84
Bibliographie ............................................................................ 86
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Traitement du signal- MCPC 2000-01 07/01/09 67
67
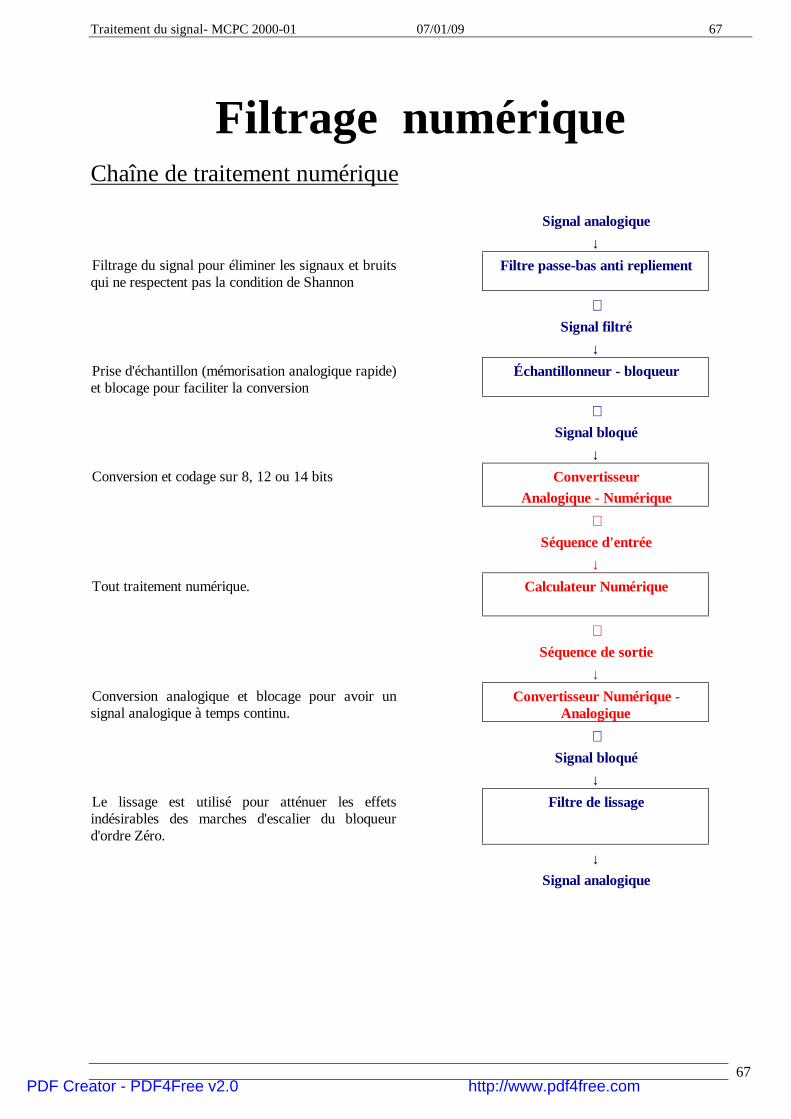
Filtrage numériqueChaîne de traitement numérique
Signal analogique ↓
Filtrage du signal pour éliminer les signaux et bruitsqui ne respectent pas la condition de Shannon
Filtre passe-bas anti repliement
Signal filtré
↓Prise d'échantillon (mémorisation analogique rapide)et blocage pour faciliter la conversion
Échantillonneur - bloqueur
Signal bloqué
↓Conversion et codage sur 8, 12 ou 14 bits Convertisseur
Analogique - Numérique
Séquence d'entrée ↓
Tout traitement numérique. Calculateur Numérique
Séquence de sortie
↓Conversion analogique et blocage pour avoir unsignal analogique à temps continu.
Convertisseur Numérique -Analogique
Signal bloqué
↓Le lissage est utilisé pour atténuer les effetsindésirables des marches d'escalier du bloqueurd'ordre Zéro.
Filtre de lissage
↓ Signal analogique
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com

68 Département Mesures Physiques - IUT Orsay
68
Transmittance en zDirac en entrée : {δk} {h k} réponse impulsionnelle du filtre.
Entrée quelconque : {xn } {yn } = {xn } ⊗ {h k} avec yn = ∑∞
0=k
hk xn-k
L’entrée et la sortie possèdent leur transformée en Z.
Z {xn }=∆ ∑∞+
= 0n
xn z-n = X(z) et Z {yn }=∆ ∑∞+
= 0n
yn z-n = Y(z)
Un produit de convolution dans un espace correspond à un produit simple dans l’autre espace transformé.
Y(z) = X(z) . H(z)
Alors la Transmittance en z du filtre vaut : H(Z) =Y(Z)X(Z)
= Z {h k}
La relation est l'analogue du cas continu : la transmittance en Z du filtre linéaire est la transformée en Z de laséquence réponse impulsionnelle du filtre numérique.
Réponse harmonique : transmittance isochroneLa transmittance habituelle H(jωTe) est obtenue pour la variable Z décrivant le lieu des fréquence pures,correspondant dans l’espace des Z au cercle unité : Z = exp(-jωTe) pour toute valeur de ω.
Stabilité d'un filtre numériqueSupposons que nous puissions mettre H(z) sous la forme du rapport de deux polynômes en Z, l’un au numérateur
N(Z) et l’autre au dénominateur D(Z), alors nous dirons que le filtre de transmittance H(Z) =N(Z)D(Z)
est stable si
tous les pôles de H(Z) (par définition il s’agit des racines du polynôme D(Z) au dénominateur) sont à l'intérieur ducercle de rayon unité.Cela correspond aux filtres dont la réponse impulsionnelle tend vers 0 au bout d'un certain temps.
k→ ∞lim h k → 0
Filtres numériques non récursifsLa récursivité traduit la notion de dépendance du calcul de {yn } en fonction d'autres éléments de la série {yn }elle-même. Les filtres les plus simples sont justement ceux pour lesquels cette dépendance n'existe pas. De telsfiltres sont dits non récursifs.On suppose ici ne s'intéresser qu'aux seuls filtres causaux. Alors supposons que la sortie ne dépend que d'unnombre fini d'entrées antérieures :yn = a0 .xn + a1 .xn − 1 + …+ a k .xn − k
H(Z) =Y(Z)X(Z)
= Z{h k} = a0 . + a1 .Z−1+ …+ a k .Z−k
Cette équation est analogue au produit de convolution entre {x k} et {h k} et nous obtenons donc que {h k} ={a k} Ces filtres sont de ce fait aussi appelés filtre à réponse impulsionnelle finie RIF. Ils sont toujours stablespar absence de dénominateur dans H(Z).
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com

Traitement du signal- MCPC 2000-01 07/01/09 69
69
Filtres numériques récursifs
{x k} H(Z) {y k}
La dépendance entre l'échantillon yn est le reste des séries {y k} et {x k} est aussi supposée de type causal. yn estdéfini à partir des échantillons antérieurs des {y k} et {x k}. L'algorithme donnant yn est la formule derécurrence suivante vraie pour toute valeur de n .
Formule de récurrence de départ :sn = a0 .xn + a1 .xn − 1 + …+ a k .xn − k - (b1 .yn − 1 + b2 .yn − 2 + …+ b p .yn − p )
On rappelle l'effet d'une translation dans le temps ou retard sur une série quelconque {fn }.
Z {fn − k} = z−k •Z {fn }
On reconstruit alors la Transformée en Z de la série {sn } dénommée Y(Z) à partir de la formule de récurrenceprécédente.
Y(Z) = Z {yn } =∆ ∑n=0
∞yn z−n
Y(Z) = ∑n=0
∞(a0 xn + a1xn − 1 + …+ a kxn − k - b1yn − 1+ …+ b pyn − p ) z−n
Y(Z) = a0 .∑n=0
∞xn z−n + a1 . ∑
n=0 ∞+ xn − 1z−n + …+ a k .∑
n=0
∞xn − kz−n
- b1 .∑n=0
∞yn − 1z−n - …- b p .∑
n=0
∞yn − p z−n
Y(Z) = a0 . X(Z) + a1 .z−1 X(Z)+ …+ a k .z−k X(Z) - b1 .z−1 Y(Z) - …- b p .z−p
Y(Z)
En factorisant Y(Z), nous obtenons le transmittance en Z
H(Z) =Y(Z)X(Z)
= Z{h k} =a0 +a1z−1+…+a kz−k
1+b1z−1+…+b pz−p
La réponse impulsionnelle d'un tel filtre est infinie, bien qu'il soit défini à partir d'un nombre fini de coefficientsa k et b p . C'est pourquoi ces filtres sont aussi appelés à réponse impulsionnelle infinie RII.
{x k} H(Z) = _____N(Z)
D(Z){y k}
Structure d'un filtre numérique récursif
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com

70 Département Mesures Physiques - IUT Orsay
70
Stabilité d'un filtre numérique récursifUn filtre est stable si la réponse impulsionnelle tend vers 0 au bout d'un certain temps.
k→ ∞lim h k → 0
La forme H(Z) =N(Z)D(Z)
est une fraction de deux polynômes en z−1 . Elle peut se mettre sous une forme
différente en décomposant ce rapport en "éléments simples".Si le polynôme au numérateur N(Z) est de rang supérieur au polynôme au dénominateur D(Z), nous effectuons ladivision de ces deux polynômes. Le résultat s'écrit :
N(Z) = Q(Z)•D(Z) + R(Z) ce qui donne H(Z) = Q(Z) +R(Z)D(Z)
avec R(Z) de rang strictement inférieur à D(Z).
Le résultat montre que la transmittance en Z est celle d'un filtre qui se met sous la forme d'une somme de deux
filtres de transmittance respective Q(Z) etR(Z)D(Z)
.
• Le premier filtre est un filtre RII toujours stable, c'est-à-dire que lorsque son entrée devient nulle, la sortiecorrespondante tend vers zéro au bout d'un certain temps. Ce n'est pas cette composante qui amène unedivergence du filtre numérique.
• On est ramené pour le second terme au cas : le polynome au numérateur N(Z) est de rang strictement inférieurau polynome au dénominateur D(Z). La décomposition en "éléments simples" fait alors apparaître la notionde pôles, c'est-à-dire les racines du polynôme D(Z) au dénominateur.
Dans le cas de polynômes à coefficients réels, les racines sont soient réelles soient appairées par deux etcomplexes conjuguées l'une de l'autre. De plus chaque racine peut être soit simple, soit multiple. Nous écrivonsune décomposition canonique en racines simples ou complexes conjuguées :
D(Z) = ∏p i réel
(1 - p i z−1) • ∏pi complexe
(1 - p i z−1) •(1 - p i z−1)
La décomposition en éléments simples ou complexes conjuguées de H(Z) est alors [voir cours de math] :
H(Z) =N(Z)D(Z)
= ∑p i réel
α i
1 - p i z−1 + ∑p i complexe
α i + βi z−1
1 - (p i + p i )z−1+ p i p i z−2
Le résultat montre que la transmittance en H(Z) est celle d'un filtre qui se met sous la forme d'une somme d'uncertain nombre de filtres de transmittance respective :
Øα i
1 - p i z−1 Ordre 1
Øα i + βi z−1
1 - (p i + p i )z−1+ p i p i z−2 Ordre 2
Sous cette forme et avec l'hypothèse où tous les pôles sont distincts, l'étude de la stabilité du filtre H(Z) se ramèneà l'étude de la stabilité des filtres récursifs d'ordre 1 ou 2 formant la décomposition. Lorsque l'entrée communeaux filtres en parallèle devient nulle, la sortie correspondante est la somme des sorties. Si aucune composanten'amène une divergence, toutes les sorties tendent vers zéro et leur somme finie tend aussi vers zéro. Le filtrenumérique H(Z) est stable.
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Traitement du signal- MCPC 2000-01 07/01/09 71
71
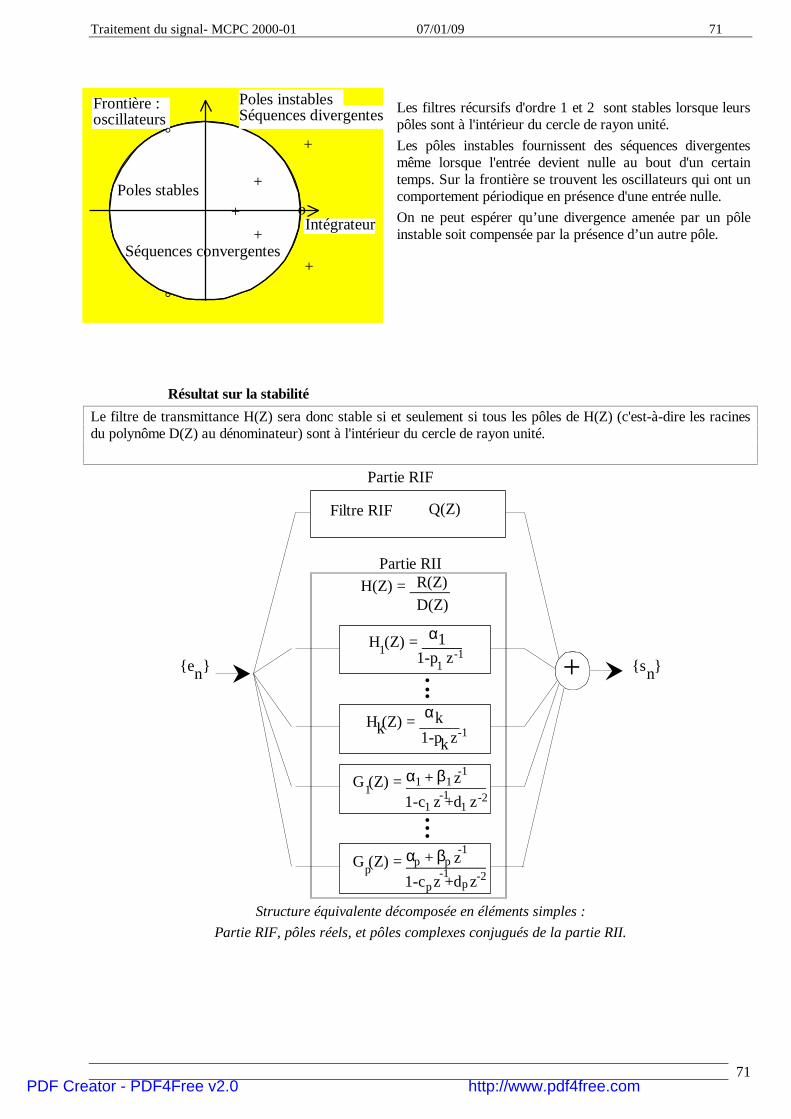
Les filtres récursifs d'ordre 1 et 2 sont stables lorsque leurspôles sont à l'intérieur du cercle de rayon unité.Les pôles instables fournissent des séquences divergentesmême lorsque l'entrée devient nulle au bout d'un certaintemps. Sur la frontière se trouvent les oscillateurs qui ont uncomportement périodique en présence d'une entrée nulle.On ne peut espérer qu’une divergence amenée par un pôleinstable soit compensée par la présence d’un autre pôle.
Résultat sur la stabilitéLe filtre de transmittance H(Z) sera donc stable si et seulement si tous les pôles de H(Z) (c'est-à-dire les racinesdu polynôme D(Z) au dénominateur) sont à l'intérieur du cercle de rayon unité.
H(Z) = _____D(Z)
{e }n
Q(Z)Filtre RIF
R(Z)
H (Z) = _____1α1
1-p z1
H (Z) = _____kαk
k
G (Z) = __________1α1 +
Partie RIF
Partie RII
+ {s }n
1-p z
1-c z +d z
-1
-1
β1 z-1
-2-1
•••
•••
G (Z) = __________pαp +1-c z +d z
βp z-1
-2-1pp
1 1
Structure équivalente décomposée en éléments simples :Partie RIF, pôles réels, et pôles complexes conjugués de la partie RII.
++
+
+
+
Poles instablesSéquences divergentes
Poles stables
Séquences convergentes
oIntégrateur
Frontière :oscillateurs
°
°
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com

72 Département Mesures Physiques - IUT Orsay
72
Exemple : intégrateur numérique
H(Z) =__. _____1 + z
1 - z{e }n
{s }nTe2 -1
-1
Question 1 : Détermination de l'algorithme et de la réponse impulsionnelle {hn }de ce filtre. Retrouver lecalcul par la méthode des trapèzes.
H(Z) =S(Z)E(Z) =
Te2
.1+ z−1
1 - z−1 ⇔ S(Z) - z−1 S(Z) =Te2
. [E(Z) + z−1 E(Z)]
Intégrale par la méthode des trapèzes.
nTe(n-1)Te
xn-1
x n
tÉgalité de deux polynômes vraie quelquesoit z ⇒ les coefficients des deux polynômes sont égaux ∀n.
⇒ Algorithme sn = sn − 1 +Te2
(en + en − 1 )
En première approximation,
nTe−Te
nTe
∫ e(t)dt = Aire du trapèze grisé
s(nTe) - s(nTe -Te) = Te.e(nTe) + e(nTe -Te)
2La réponse impulsionnelle est alors obtenue comme la réponse à un Dirac en utilisant la formule de récurrence.
h0 =Te2
(δ0 + δ− 1) =Te2
h1 = h0 +Te2
(δ1+ δ0 ) = Te
h2 = h1 = Te = h3 = … = hn
Question 2 - Etudier la stabilité de ce filtre.Le filtre intégrateur représente le cas limite des fonctions de transfert stables. En effet, il admet 1 comme pôle réelsimple. Il ne vérifie donc pas l'inégalité stricte qui définit la frontière de stabilité (pôle à l'intérieur du cercle unité).Cela se traduit évidemment par le fait que la condition de stabilité exprimée par :Un système est stable si et seulement si, soumis à une entrée nulle à partir d'un certain échantillon, la sortie tendvers zéro au bout d'un certain temps.L'exemple de la réponse impulsionnelle montre en fait que la sortie devient constante à partir du moment oùl'entrée devient nulle. Ceci est bien conforme au fonctionnement d'un intégrateur et montre un comportementpossible des filtres à la limite de la condition d'instabilité, c'est-à-dire lorsqu'ils ont des pôles sur le cercle de rayonunité.
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com

Traitement du signal- MCPC 2000-01 07/01/09 73
73
Question 3 - Etudier la réponse en fréquence de ce filtre. Tracer le module et l'argument de H fonction deω dans la limite de Shannon.
H( z=e jωTe ) =Te2
.1+ z−1
1 - z−1 =Te2
.1+e−jωTe
1 -e−jωTe =Te2
.exp(-jω
Te2
)
exp(-jωTe2
).
exp(jωTe2
) + exp(-jωTe2
)
exp(jωTe2
) - exp(-jωTe2
)
0,4
1
2
fFe
H
0,30,20,10 0,5
H(z) =Te2
.2cos(ω
Te2
)
2jsin(ωTe2
)=
Te2
.-j
tan(ωTe2
)= H ejφ ⇒ H =
Te2
.1
tan(ωTe2
)0< f < ½ Fe
⇒ φ = -π2
0< f < ½ . Fe
On retrouve la formule concernant l'intégrateur analogique en faisant tendre la période d'échantillonnage Te vers
0. Dans ce cas tan(ωTe2
) tend vers ωTe2
et H(jω) =1jω
4 Déterminer la séquence de sortie {sn } pour l'entrée {en } = {un } - {un − 4}
Pour déterminer la séquence de sortie, nous traçons un tableau dont les lignes sont les différentes variablesintervenant dans la formule de récurrence, et dont les colonnes représentent le défilement des indices derécurrence.n -2 -1 0 1 2 3 4 5 6 7en-1 0 0 0 1 1 1 1 0 0 0
en 0 0 1 1 1 1 0 0 0 0
sn-1 0 0 0 Te2
3Te2
5Te2
7Te2
4 Te 4 Te 4 Te
sn 0 0 Te2
3Te2
5Te2
7Te2
4 Te 4 Te 4 Te 4Te
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com

74 Département Mesures Physiques - IUT Orsay
74
Exemple de filtre passe-bas
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com

Synthèse de filtres numériquesFiltres non récursifs à phase linéaire
{e k} H(Z) {s k}
La dépendance entre l'échantillon de sortie s et l’entrée {e k} est de type causal. L'algorithme donnant sn suit laformule de récurrence vraie pour toute valeur de n :
sn = a0 .en + a1 .en − 1 + …+ aN −1 .en +1−N = ∑k=0
N-1a k .en − k
A partir des remarques suivantes, on va pouvoir réaliser des filtres causaux à phase linéaire.
La réponse en fréquence d'un filtre est la transformée de Fourier de la réponse impulsionnelle de ce filtre.
H(jω) = F [h(t)]
L'argument de la réponse en fréquence d'un filtre de réponse impulsionnelle symétrique est nul, car satransformée de Fourier est suivant l'axe réel.Par translation dans le temps d’un valeur τ d'une réponse impulsionnelle pour la faire passer de symétrique àcausale, on introduit un déphasage linéaire sur la réponse en fréquence du filtre
H1(jω) = F [h(t-τ)] = e−jωτF [h(x)] = e−jωτ H(jω)
Méthode avec échantillonnage de la réponse impulsionnelleMéthode avec prototype en fréquence, échantillonnage et troncature de la réponse
impulsionnelle en temps.a• Nous partons de la réponse en fréquence que nous désirons G(jω) appelée le prototype dans le domainedes fréquences en faisant les hypothèses que cette dernière est une fonction réelle ou imaginaire pure.b• Nous sommes alors capables de calculer la réponse impulsionnelle g(k.Te) correspondante par
transformée de Fourier inverse g(t) = F−1[G(jω)] . Si la réponse en fréquence a un support borné, alors la
réponse correspondante en temps a un support infini. Cette réponse peut donc comporter un nombre infini determes. Nous réalisons alors une troncature symétrique g'(t) de la réponse impulsionnelle g(t) à un nombre fini determes. Ce nombre N est choisi impair pour simplifier. A cause de la troncature, la réponse en fréquence
correspondante n'est plus G(jω) mais G'(jω) = F [g'(t)].
c• Nous utilisons alors comme réponse impulsionnelle causale h(k.Te) la réponse impulsionnelle g'(k.Te)décalée d'un nombre ½ (N-1) d'échantillons. Ceci correspond à un décalage temporel assimilable à un retard purvalant τ = ½ (N-1)×Te. Ce décalage introduit un terme de phase linéaire en fréquence dans la réponse spectralequi vaut φ = – ½ (N-1)×Te.ω.
d• Le résultat est une réponse en fréquence qui vaut finalement H(jω) = e−jωτ G'(jω), qui est donc celle
d'un filtre à phase linéaire, mais qui n'est pas la réponse en fréquence du filtre prototype initial G(jω).
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
76 Département Mesures Physiques - IUT Orsay
76
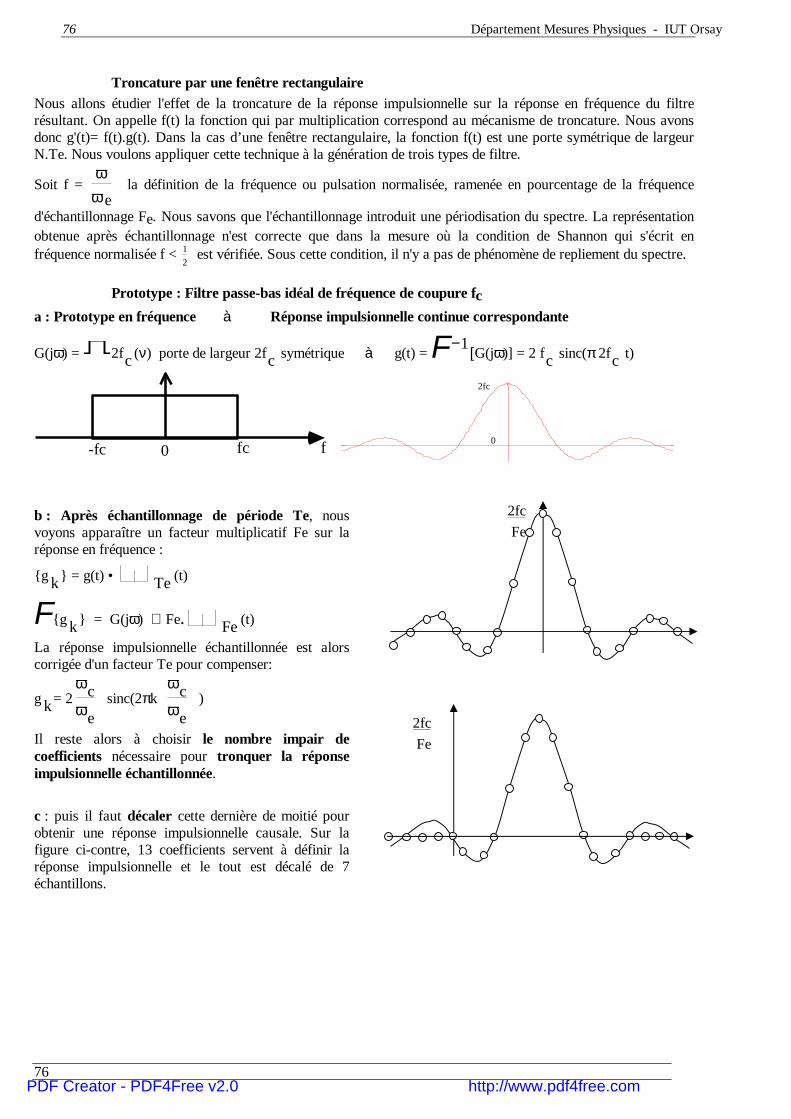
Troncature par une fenêtre rectangulaireNous allons étudier l'effet de la troncature de la réponse impulsionnelle sur la réponse en fréquence du filtrerésultant. On appelle f(t) la fonction qui par multiplication correspond au mécanisme de troncature. Nous avonsdonc g'(t)= f(t).g(t). Dans la cas d’une fenêtre rectangulaire, la fonction f(t) est une porte symétrique de largeurN.Te. Nous voulons appliquer cette technique à la génération de trois types de filtre.
Soit f =ω
eωla définition de la fréquence ou pulsation normalisée, ramenée en pourcentage de la fréquence
d'échantillonnage Fe. Nous savons que l'échantillonnage introduit une périodisation du spectre. La représentationobtenue après échantillonnage n'est correcte que dans la mesure où la condition de Shannon qui s'écrit enfréquence normalisée f < 1
2est vérifiée. Sous cette condition, il n'y a pas de phénomène de repliement du spectre.
Prototype : Filtre passe-bas idéal de fréquence de coupure fca : Prototype en fréquence à Réponse impulsionnelle continue correspondante
G(jω) = 2fc (ν) porte de largeur 2fc symétrique à g(t) = F−1[G(jω)] = 2 fc sinc(π 2fc t)
-fc 0 fc f
b : Après échantillonnage de période Te, nousvoyons apparaître un facteur multiplicatif Fe sur laréponse en fréquence :
{g k} = g(t) • Te (t)
F{g k} = G(jω) ⊗ Fe. Fe (t)
La réponse impulsionnelle échantillonnée est alorscorrigée d'un facteur Te pour compenser:
g k= 2ω cω e
sinc(2πk ω cω e
)
Il reste alors à choisir le nombre impair decoefficients nécessaire pour tronquer la réponseimpulsionnelle échantillonnée.
c : puis il faut décaler cette dernière de moitié pourobtenir une réponse impulsionnelle causale. Sur lafigure ci-contre, 13 coefficients servent à définir laréponse impulsionnelle et le tout est décalé de 7échantillons.
2fcFe
2fcFe
0
2fc
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Traitement du signal- MCPC 2000-01 07/01/09 77
77
0
1
-0.5 0 0.5
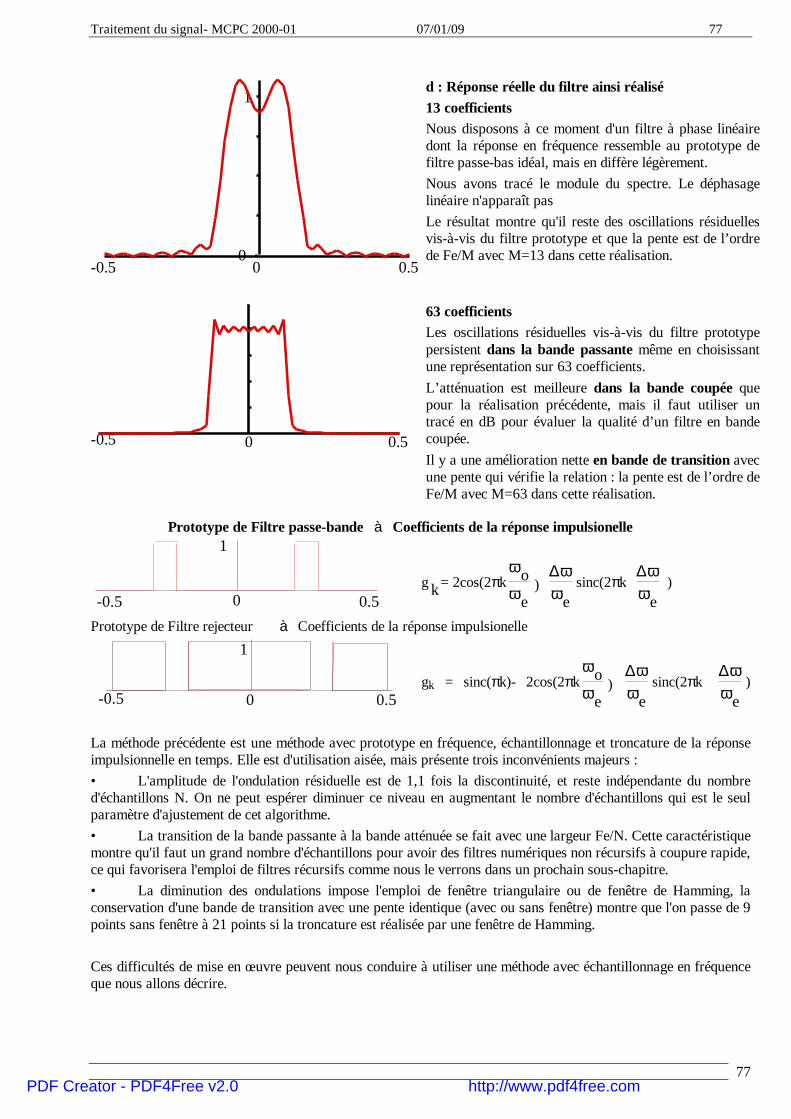
d : Réponse réelle du filtre ainsi réalisé13 coefficientsNous disposons à ce moment d'un filtre à phase linéairedont la réponse en fréquence ressemble au prototype defiltre passe-bas idéal, mais en diffère légèrement.Nous avons tracé le module du spectre. Le déphasagelinéaire n'apparaît pasLe résultat montre qu'il reste des oscillations résiduellesvis-à-vis du filtre prototype et que la pente est de l’ordrede Fe/M avec M=13 dans cette réalisation.
-0.5 0 0.5
63 coefficientsLes oscillations résiduelles vis-à-vis du filtre prototypepersistent dans la bande passante même en choisissantune représentation sur 63 coefficients.L’atténuation est meilleure dans la bande coupée quepour la réalisation précédente, mais il faut utiliser untracé en dB pour évaluer la qualité d’un filtre en bandecoupée.Il y a une amélioration nette en bande de transition avecune pente qui vérifie la relation : la pente est de l’ordre deFe/M avec M=63 dans cette réalisation.
Prototype de Filtre passe-bande à Coefficients de la réponse impulsionelle1
-0.5 0 0.5g k= 2cos(2πk
ω oω e
)∆ωω e
sinc(2πk ∆ωω e
)
Prototype de Filtre rejecteur à Coefficients de la réponse impulsionelle
-0.5 0 0.5
1
gk = sinc(πk)- 2cos(2πkω oω e
)∆ωω e
sinc(2πk ∆ωω e
)
La méthode précédente est une méthode avec prototype en fréquence, échantillonnage et troncature de la réponseimpulsionnelle en temps. Elle est d'utilisation aisée, mais présente trois inconvénients majeurs :• L'amplitude de l'ondulation résiduelle est de 1,1 fois la discontinuité, et reste indépendante du nombred'échantillons N. On ne peut espérer diminuer ce niveau en augmentant le nombre d'échantillons qui est le seulparamètre d'ajustement de cet algorithme.• La transition de la bande passante à la bande atténuée se fait avec une largeur Fe/N. Cette caractéristiquemontre qu'il faut un grand nombre d'échantillons pour avoir des filtres numériques non récursifs à coupure rapide,ce qui favorisera l'emploi de filtres récursifs comme nous le verrons dans un prochain sous-chapitre.• La diminution des ondulations impose l'emploi de fenêtre triangulaire ou de fenêtre de Hamming, laconservation d'une bande de transition avec une pente identique (avec ou sans fenêtre) montre que l'on passe de 9points sans fenêtre à 21 points si la troncature est réalisée par une fenêtre de Hamming.
Ces difficultés de mise en œuvre peuvent nous conduire à utiliser une méthode avec échantillonnage en fréquenceque nous allons décrire.
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
78 Département Mesures Physiques - IUT Orsay
78
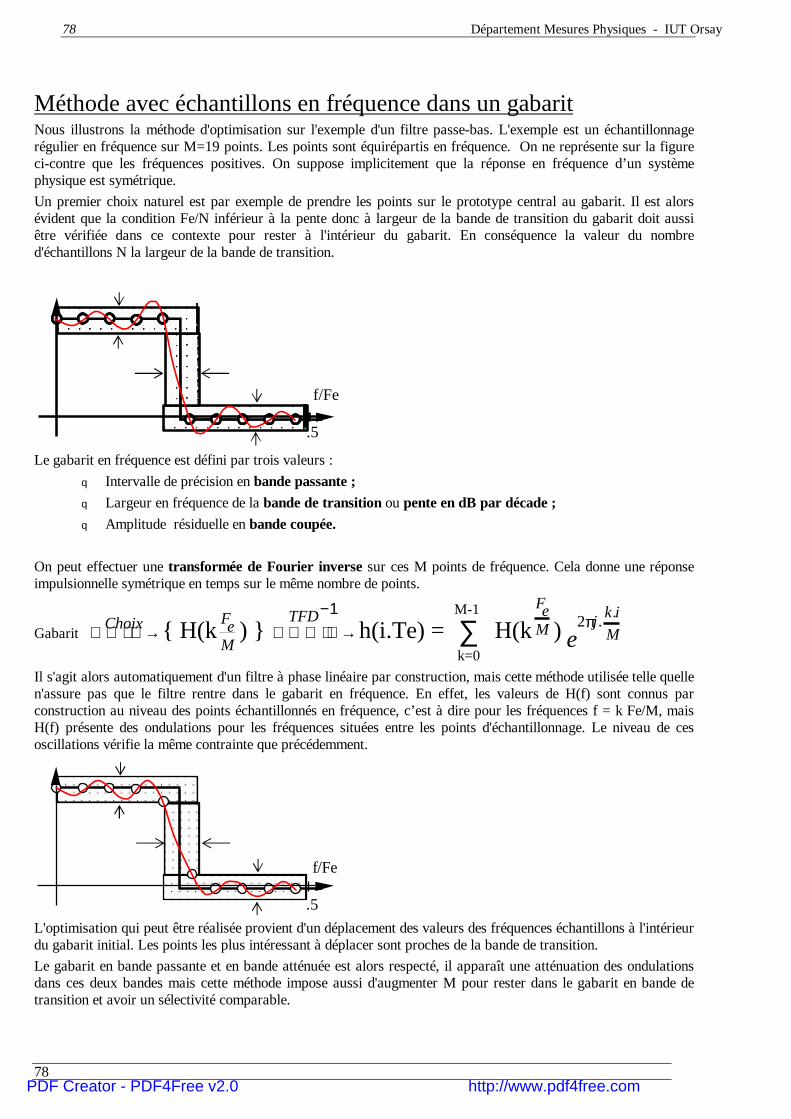
Méthode avec échantillons en fréquence dans un gabaritNous illustrons la méthode d'optimisation sur l'exemple d'un filtre passe-bas. L'exemple est un échantillonnagerégulier en fréquence sur M=19 points. Les points sont équirépartis en fréquence. On ne représente sur la figureci-contre que les fréquences positives. On suppose implicitement que la réponse en fréquence d’un systèmephysique est symétrique.Un premier choix naturel est par exemple de prendre les points sur le prototype central au gabarit. Il est alorsévident que la condition Fe/N inférieur à la pente donc à largeur de la bande de transition du gabarit doit aussiêtre vérifiée dans ce contexte pour rester à l'intérieur du gabarit. En conséquence la valeur du nombred'échantillons N la largeur de la bande de transition.
f/Fe
.5
Le gabarit en fréquence est défini par trois valeurs :q Intervalle de précision en bande passante ;q Largeur en fréquence de la bande de transition ou pente en dB par décade ;q Amplitude résiduelle en bande coupée.
On peut effectuer une transformée de Fourier inverse sur ces M points de fréquence. Cela donne une réponseimpulsionnelle symétrique en temps sur le même nombre de points.
Gabarit → Choix { H(k FeM
) } →1−TFD
h(i.Te) = ∑k=0
M-1H(k
FeM ) e
2πj. k.iM
Il s'agit alors automatiquement d'un filtre à phase linéaire par construction, mais cette méthode utilisée telle quellen'assure pas que le filtre rentre dans le gabarit en fréquence. En effet, les valeurs de H(f) sont connus parconstruction au niveau des points échantillonnés en fréquence, c’est à dire pour les fréquences f = k Fe/M, maisH(f) présente des ondulations pour les fréquences situées entre les points d'échantillonnage. Le niveau de cesoscillations vérifie la même contrainte que précédemment.
L'optimisation qui peut être réalisée provient d'un déplacement des valeurs des fréquences échantillons à l'intérieurdu gabarit initial. Les points les plus intéressant à déplacer sont proches de la bande de transition.Le gabarit en bande passante et en bande atténuée est alors respecté, il apparaît une atténuation des ondulationsdans ces deux bandes mais cette méthode impose aussi d'augmenter M pour rester dans le gabarit en bande detransition et avoir un sélectivité comparable.
f/Fe
.5
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Traitement du signal- MCPC 2000-01 07/01/09 79
79
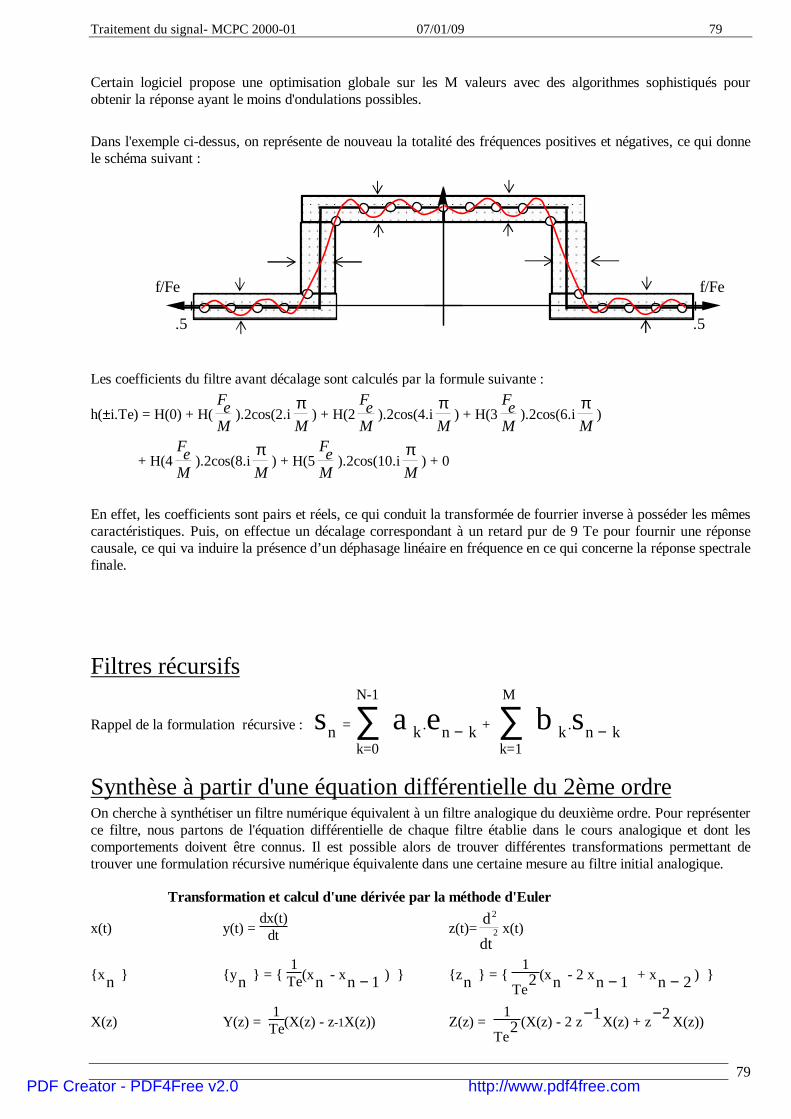
Certain logiciel propose une optimisation globale sur les M valeurs avec des algorithmes sophistiqués pourobtenir la réponse ayant le moins d'ondulations possibles.
Dans l'exemple ci-dessus, on représente de nouveau la totalité des fréquences positives et négatives, ce qui donnele schéma suivant :
Les coefficients du filtre avant décalage sont calculés par la formule suivante :
h(±i.Te) = H(0) + H(FeM
).2cos(2.iπM
) + H(2FeM
).2cos(4.iπM
) + H(3FeM
).2cos(6.iπM
)
+ H(4FeM
).2cos(8.iπM
) + H(5FeM
).2cos(10.iπM
) + 0
En effet, les coefficients sont pairs et réels, ce qui conduit la transformée de fourrier inverse à posséder les mêmescaractéristiques. Puis, on effectue un décalage correspondant à un retard pur de 9 Te pour fournir une réponsecausale, ce qui va induire la présence d’un déphasage linéaire en fréquence en ce qui concerne la réponse spectralefinale.
Filtres récursifs
Rappel de la formulation récursive : sn =∑k=0
N-1
a k .en − k + ∑k=1
M
b k .sn − k
Synthèse à partir d'une équation différentielle du 2ème ordreOn cherche à synthétiser un filtre numérique équivalent à un filtre analogique du deuxième ordre. Pour représenterce filtre, nous partons de l'équation différentielle de chaque filtre établie dans le cours analogique et dont lescomportements doivent être connus. Il est possible alors de trouver différentes transformations permettant detrouver une formulation récursive numérique équivalente dans une certaine mesure au filtre initial analogique.
Transformation et calcul d'une dérivée par la méthode d'Euler
x(t) y(t) =dx(t)
dt z(t)=2d2
dtx(t)
{xn } {yn } = {1
Te(xn - xn − 1 ) } {zn } = {1
Te2 (xn - 2 xn − 1 + xn − 2 ) }
X(z) Y(z) =1
Te(X(z) - z-1X(z)) Z(z) =1
Te2 (X(z) - 2 z−1X(z) + z−2 X(z))
f/Fe
.5
f/Fe
.5
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com

80 Département Mesures Physiques - IUT Orsay
80
Dans l'espace de Laplace, la dérivée est un opérateur qui s'exprime par D(p) =Y(p)X(p)
= p
Dans l'espace en Z, la dérivée est un opérateur qui s'exprime par D(z) =1
Te(1 - z−1)
Filtre passe-bas L'équation analogique est s(t) +2mω 0
ddt
s(t) +1ω 0
2
2d2
dts(t) = e(t)
La transformation donne
sn +2mω 0 Te
(sn - sn − 1) +1
(ω 0 Te)2 (sn - 2 sn − 1 + sn − 2 ) = en
sn (1 +2mω 0 Te
+1
(ω 0 Te)2 ) - 2 sn − 1(m
ω 0 Te+
1(ω 0 Te)2 ) + sn − 2
1(ω 0 Te)2 = en
Par analogie avec la formule de récurrence sn = a0 en + b1 sn − 1 + b2 sn − 2 , nous trouvons lescoefficients du filtre récursif à implanter.
ao =(ω 0 Te)2
(ω 0 Te)2 + 2m.ω 0 Te + 1
b1 =2m ω 0 Te + 2
(ω 0 Te)2 + 2m.ω 0 Te + 1
b2 =-1
(ω 0 Te)2 + 2m.ω 0 Te + 1
Dans le cadre de filtre passe-bande et réjecteur, on propose de partir des équations analogiques suivantes qui sontduales de la précédente :
Filtre passe-bande L'équation analogique est s(t) +2mω 0
ddt
s(t) +1ω 0
2
2d2
dts(t) =
2mω 0
ddt
e(t)
Filtre rejecteur s(t) +2mω 0
ddt
s(t) +1ω 0
2
2d2
dts(t) = e(t) +
1ω 0
2
2d2
dte(t)
Synthèse à partir de filtre prototype et transformation bilinéaire
Le point de départ de cette méthode est de reproduire un certain nombre de filtres analogiques dont les propriétéset les caractéristiques ont été bien étudiées par ailleurs dans le monde "analogique". Le filtre de départ est alors unfiltre prototype tels que Butterworth, Bessel, Tchebycheff, fonctions elliptiques.Le choix de ce filtre se fait en fonction de caractéristiques particulières que l'on aimerait retrouver et reproduiredans le monde numérique. Il faut remarquer à ce niveau que la connaissance du filtre prototype nous renseigneseulement sur ce qui se passe en fréquence (donc sur l'axe des imaginaires purs).Il est à noter aussi que le mécanisme d'échantillonnage doit reproduire un mécanisme de repliement du spectreavec une périodicité de fréquence Fe.
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Traitement du signal- MCPC 2000-01 07/01/09 81
81
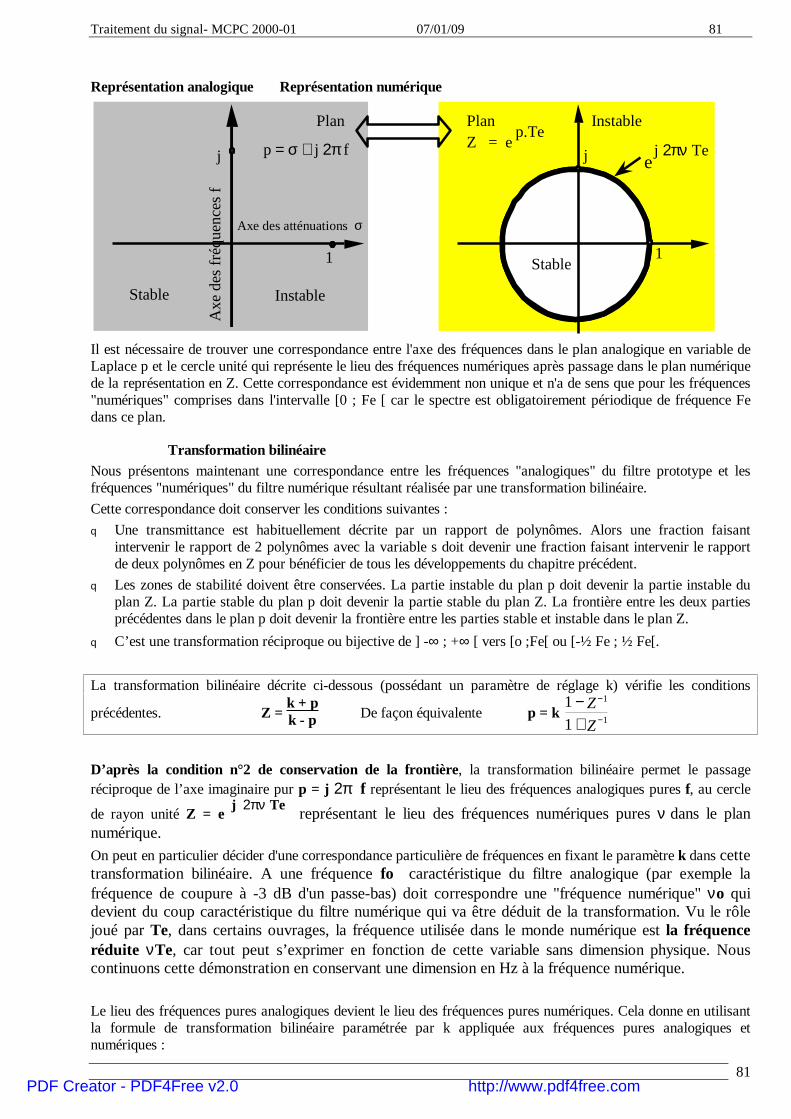
Représentation analogique Représentation numérique
Plan
p = σ + j 2π f
InstableStable
Axe
desf
réqu
ence
sf
Planp.Te
Instable
Stable
Z = e
1
jj
1
j 2πν Tee
Axe des atténuations σ
Il est nécessaire de trouver une correspondance entre l'axe des fréquences dans le plan analogique en variable deLaplace p et le cercle unité qui représente le lieu des fréquences numériques après passage dans le plan numériquede la représentation en Z. Cette correspondance est évidemment non unique et n'a de sens que pour les fréquences"numériques" comprises dans l'intervalle [0 ; Fe [ car le spectre est obligatoirement périodique de fréquence Fedans ce plan.
Transformation bilinéaireNous présentons maintenant une correspondance entre les fréquences "analogiques" du filtre prototype et lesfréquences "numériques" du filtre numérique résultant réalisée par une transformation bilinéaire.Cette correspondance doit conserver les conditions suivantes :q Une transmittance est habituellement décrite par un rapport de polynômes. Alors une fraction faisant
intervenir le rapport de 2 polynômes avec la variable s doit devenir une fraction faisant intervenir le rapportde deux polynômes en Z pour bénéficier de tous les développements du chapitre précédent.
q Les zones de stabilité doivent être conservées. La partie instable du plan p doit devenir la partie instable duplan Z. La partie stable du plan p doit devenir la partie stable du plan Z. La frontière entre les deux partiesprécédentes dans le plan p doit devenir la frontière entre les parties stable et instable dans le plan Z.
q C’est une transformation réciproque ou bijective de ] -∞ ; +∞ [ vers [o ;Fe[ ou [-½ Fe ; ½ Fe[.
La transformation bilinéaire décrite ci-dessous (possédant un paramètre de réglage k) vérifie les conditions
précédentes. Z =k + pk - p De façon équivalente p = k
1− −1Z1+ −1Z
D’après la condition n°2 de conservation de la frontière, la transformation bilinéaire permet le passageréciproque de l’axe imaginaire pur p = j 2π f représentant le lieu des fréquences analogiques pures f, au cercle
de rayon unité Z = e j 2πν Te représentant le lieu des fréquences numériques pures ν dans le plannumérique.On peut en particulier décider d'une correspondance particulière de fréquences en fixant le paramètre k dans cettetransformation bilinéaire. A une fréquence fo caractéristique du filtre analogique (par exemple lafréquence de coupure à -3 dB d'un passe-bas) doit correspondre une "fréquence numérique" νo quidevient du coup caractéristique du filtre numérique qui va être déduit de la transformation. Vu le rôlejoué par Te, dans certains ouvrages, la fréquence utilisée dans le monde numérique est la fréquenceréduite νTe, car tout peut s’exprimer en fonction de cette variable sans dimension physique. Nouscontinuons cette démonstration en conservant une dimension en Hz à la fréquence numérique.
Le lieu des fréquences pures analogiques devient le lieu des fréquences pures numériques. Cela donne en utilisantla formule de transformation bilinéaire paramétrée par k appliquée aux fréquences pures analogiques etnumériques :
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
82 Département Mesures Physiques - IUT Orsay
82
p = j 2π f = k1− −1Z1+ −1Z
= k1− e -j 2πν Te
1+ e -j 2πν Te
= ke +j πν Te − e -j πν Te
e +j πν Te + e -j πν Te
= k2j sin(π ν.Te)2 cos (π ν.Te)
= k j tan(π ν.Te)⇔ 2π f = k tan(π ν.Te) = k tan(π νFe )
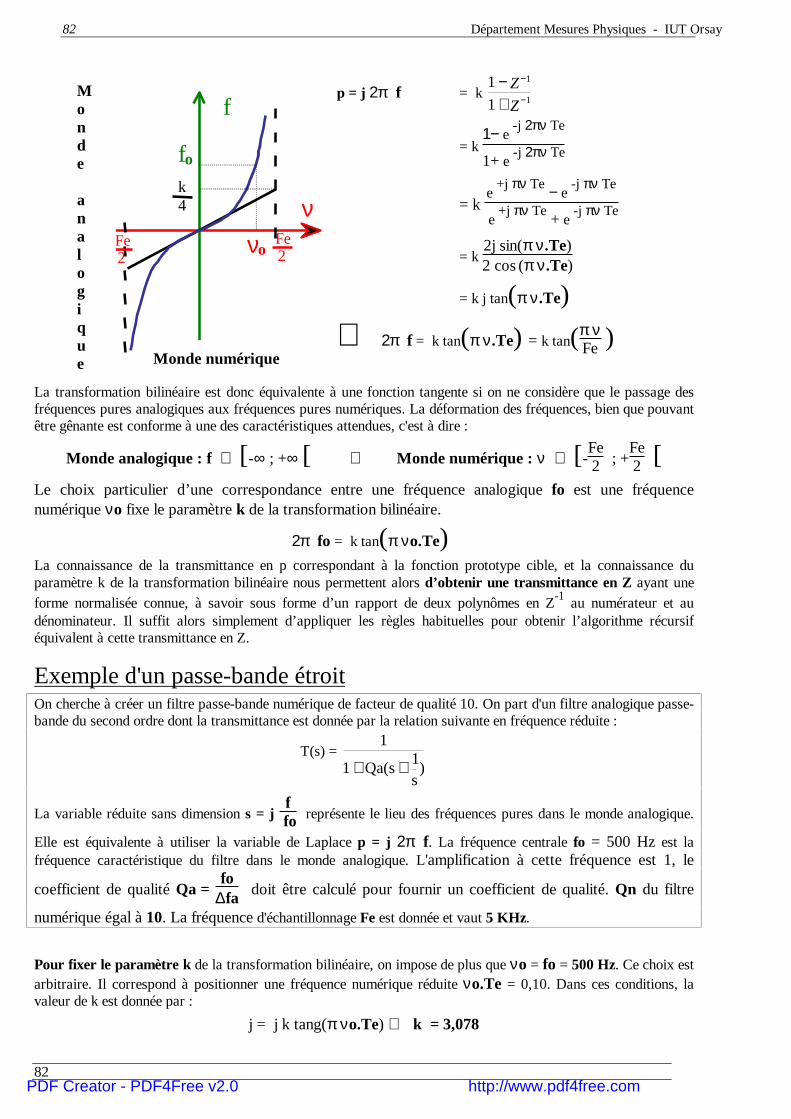
La transformation bilinéaire est donc équivalente à une fonction tangente si on ne considère que le passage desfréquences pures analogiques aux fréquences pures numériques. La déformation des fréquences, bien que pouvantêtre gênante est conforme à une des caractéristiques attendues, c'est à dire :
Monde analogique : f ∈ [-∞ ; +∞ [ ⇔ Monde numérique : ν ∈ [-Fe2 ; +
Fe2 [
Le choix particulier d’une correspondance entre une fréquence analogique fo est une fréquencenumérique νo fixe le paramètre k de la transformation bilinéaire.
2π fo = k tan(π νo.Te)La connaissance de la transmittance en p correspondant à la fonction prototype cible, et la connaissance duparamètre k de la transformation bilinéaire nous permettent alors d’obtenir une transmittance en Z ayant uneforme normalisée connue, à savoir sous forme d’un rapport de deux polynômes en Z-1 au numérateur et audénominateur. Il suffit alors simplement d’appliquer les règles habituelles pour obtenir l’algorithme récursiféquivalent à cette transmittance en Z.
Exemple d'un passe-bande étroitOn cherche à créer un filtre passe-bande numérique de facteur de qualité 10. On part d'un filtre analogique passe-bande du second ordre dont la transmittance est donnée par la relation suivante en fréquence réduite :
T(s) =1
1+Qa(s + 1s)
La variable réduite sans dimension s = jffo représente le lieu des fréquences pures dans le monde analogique.
Elle est équivalente à utiliser la variable de Laplace p = j 2π f. La fréquence centrale fo = 500 Hz est lafréquence caractéristique du filtre dans le monde analogique. L'amplification à cette fréquence est 1, le
coefficient de qualité Qa =fo∆fa doit être calculé pour fournir un coefficient de qualité. Qn du filtre
numérique égal à 10. La fréquence d'échantillonnage Fe est donnée et vaut 5 KHz.
Pour fixer le paramètre k de la transformation bilinéaire, on impose de plus que νo = fo = 500 Hz. Ce choix estarbitraire. Il correspond à positionner une fréquence numérique réduite νo.Te = 0,10. Dans ces conditions, lavaleur de k est donnée par :
j = j k tang(π νo.Te) ⇔ k = 3,078
f
νk4
Fe2
Fe2- νo
fo
Monde numérique
Monde
analogique
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Traitement du signal- MCPC 2000-01 07/01/09 83
83
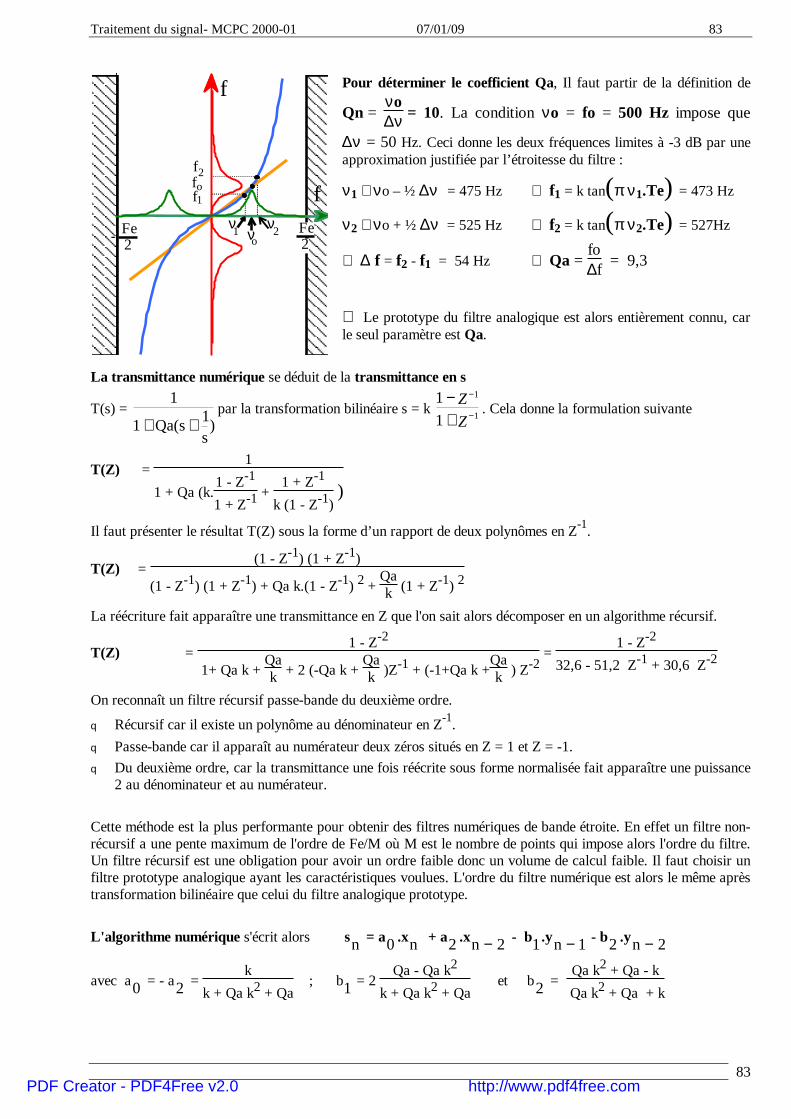
Pour déterminer le coefficient Qa, Il faut partir de la définition de
Qn =νo∆ν = 10. La condition νo = fo = 500 Hz impose que
∆ν = 50 Hz. Ceci donne les deux fréquences limites à -3 dB par uneapproximation justifiée par l’étroitesse du filtre :
ν1 ≅ νo – ½ ∆ν = 475 Hz ⇒ f1 = k tan(π ν1.Te) = 473 Hz
ν2 ≅ νo + ½ ∆ν = 525 Hz ⇒ f2 = k tan(π ν2.Te) = 527Hz
⇒ ∆ f = f2 - f1 = 54 Hz ⇒ Qa =fo∆f = 9,3
⇒ Le prototype du filtre analogique est alors entièrement connu, carle seul paramètre est Qa.
La transmittance numérique se déduit de la transmittance en s
T(s) =1
1 +Qa(s + 1s)
par la transformation bilinéaire s = k1− −1Z1+ −1Z
. Cela donne la formulation suivante
T(Z) =1
1 + Qa (k.1 - Z-1
1 + Z-1 +1 + Z-1
k (1 - Z-1))
Il faut présenter le résultat T(Z) sous la forme d’un rapport de deux polynômes en Z-1.
T(Z) =(1 - Z-1) (1 + Z-1)
(1 - Z-1) (1 + Z-1) + Qa k.(1 - Z-1) 2 +Qak (1 + Z-1) 2
La réécriture fait apparaître une transmittance en Z que l'on sait alors décomposer en un algorithme récursif.
T(Z) =1 - Z-2
1+ Qa k +Qak + 2 (-Qa k +
Qak )Z-1 + (-1+Qa k +
Qak ) Z-2
=1 - Z-2
32,6 - 51,2 Z-1 + 30,6 Z-2
On reconnaît un filtre récursif passe-bande du deuxième ordre.
q Récursif car il existe un polynôme au dénominateur en Z-1.q Passe-bande car il apparaît au numérateur deux zéros situés en Z = 1 et Z = -1.q Du deuxième ordre, car la transmittance une fois réécrite sous forme normalisée fait apparaître une puissance
2 au dénominateur et au numérateur.
Cette méthode est la plus performante pour obtenir des filtres numériques de bande étroite. En effet un filtre non-récursif a une pente maximum de l'ordre de Fe/M où M est le nombre de points qui impose alors l'ordre du filtre.Un filtre récursif est une obligation pour avoir un ordre faible donc un volume de calcul faible. Il faut choisir unfiltre prototype analogique ayant les caractéristiques voulues. L'ordre du filtre numérique est alors le même aprèstransformation bilinéaire que celui du filtre analogique prototype.
L'algorithme numérique s'écrit alors sn = a0 .xn + a2 .xn − 2 - b1 .yn − 1 - b2 .yn − 2
avec a0 = - a2 =k
k + Qa k2 + Qa; b1 = 2
Qa - Qa k2
k + Qa k2 + Qaet b2 =
Qa k2 + Qa - kQa k2 + Qa + k
f
fFe2
Fe2-
fo
νo
f2
f1
ν1 ν2
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
84 Département Mesures Physiques - IUT Orsay
84
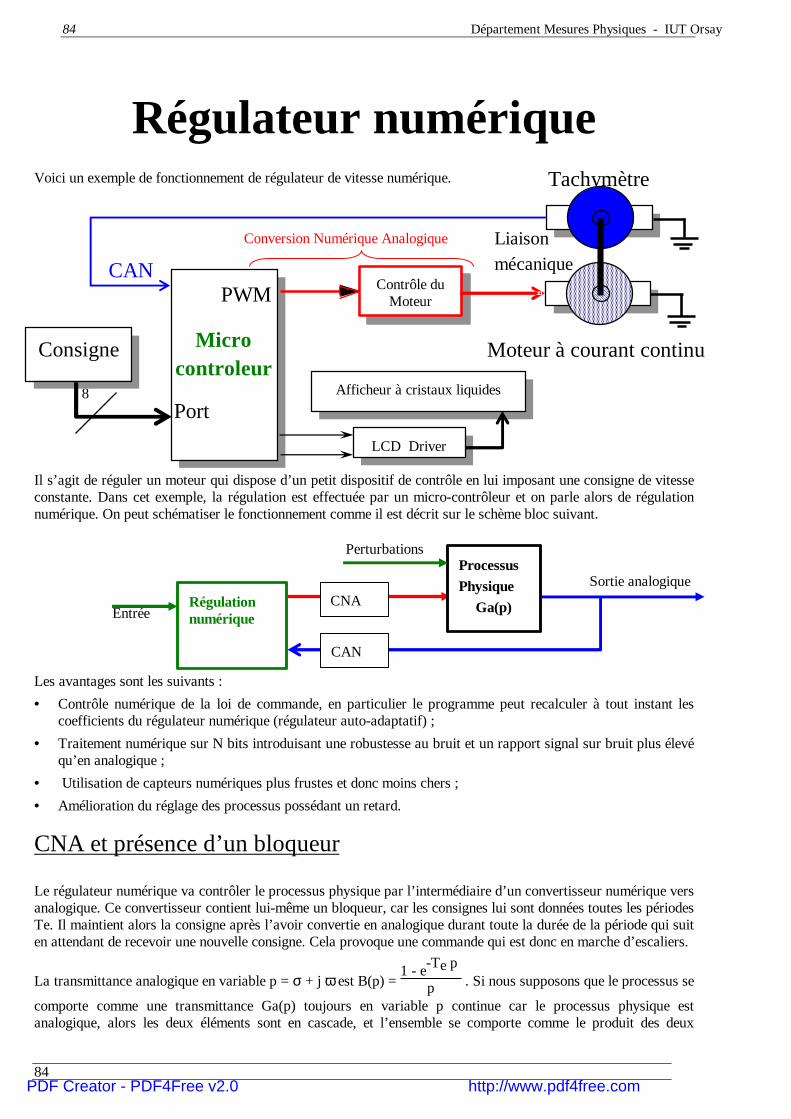
Régulateur numériqueVoici un exemple de fonctionnement de régulateur de vitesse numérique.
Il s’agit de réguler un moteur qui dispose d’un petit dispositif de contrôle en lui imposant une consigne de vitesseconstante. Dans cet exemple, la régulation est effectuée par un micro-contrôleur et on parle alors de régulationnumérique. On peut schématiser le fonctionnement comme il est décrit sur le schème bloc suivant.
Les avantages sont les suivants :• Contrôle numérique de la loi de commande, en particulier le programme peut recalculer à tout instant les
coefficients du régulateur numérique (régulateur auto-adaptatif) ;• Traitement numérique sur N bits introduisant une robustesse au bruit et un rapport signal sur bruit plus élevé
qu’en analogique ;• Utilisation de capteurs numériques plus frustes et donc moins chers ;• Amélioration du réglage des processus possédant un retard.
CNA et présence d’un bloqueur
Le régulateur numérique va contrôler le processus physique par l’intermédiaire d’un convertisseur numérique versanalogique. Ce convertisseur contient lui-même un bloqueur, car les consignes lui sont données toutes les périodesTe. Il maintient alors la consigne après l’avoir convertie en analogique durant toute la durée de la période qui suiten attendant de recevoir une nouvelle consigne. Cela provoque une commande qui est donc en marche d’escaliers.
La transmittance analogique en variable p = σ + j ω est B(p) =1 - e-Te p
p . Si nous supposons que le processus se
comporte comme une transmittance Ga(p) toujours en variable p continue car le processus physique estanalogique, alors les deux éléments sont en cascade, et l’ensemble se comporte comme le produit des deux
Tachymètre
Contrôle duMoteur
Microcontroleur
PWM
PortAfficheur à cristaux liquides
LCD Driver
8
Liaisonmécanique
Consigne
CANConversion Numérique Analogique
Moteur à courant continu
EntréeRégulationnumérique
CNA
ProcessusPhysique
Ga(p)
CAN
Perturbations
Sortie analogique
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com

Traitement du signal- MCPC 2000-01 07/01/09 85
85
transmittances B(p) Ga(p) =1 - e-Te p
p Ga(p). La sortie du processus est de nouveau échantillonnée avec la
même période pour servir de référence au régulateur numérique. Dans le monde numérique, il est alors caractérisépar une fonction de transfert en z de la forme :
G(z) = (1-z-1) Z[Ga(p)p ]
La présence du bloqueur se traduit donc par un polynôme multiplicatif en (1-z-1) au numérateur et par un termediviseur en 1/p qui intervient en modifiant la transmittance analogique du processus physique lui-même avanttransformation en Z.
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
86 Département Mesures Physiques - IUT Orsay
86
BibliographieNiveau IUT
J.L. AZAN, Précis d’électronique, Cours et exercices résolus, Tome 1 &2, Collection enseignement supérieurdes techniques industrielles, Bréal, 1994.
M. BELLANGER, Traitement numérique du signal, 6ème édition, Dunod 1998.
F. COTTET, Traitement des signaux et acquisition de données, Dunod 1997.
F. COTTET, Aide-mémoire de traitement du signal, Dunod, 2000.
A. DELUZURIEUX, M. RAMI, Problèmes d’électronique numérique : échantillonnage, filtrage,asservissement, modulation, BTS-IUT, EYROLLES, 1989.
J. MAX et J.-L. LACOUME, Méthodes et techniques de traitement du signal et application aux mesuresphysiques, 5ème édition, Dunod 2000.
============ Université Paris-Sud ==========
ORSAYDépartement Mesures Physiques
2ème année
PDF Creator - PDF4Free v2.0 http://www.pdf4free.com
Top Related