



γλώσσες
Σελίδες
Νομικός


AMERICAN RESEARCH PRESS
Pierre A. Millette
E l a s t o d y n a m i c so f t h e
S p a c e t i m e C o n t i n u u mA Spacetime Physics Theory of Gravitation,
Electromagnetism and Quantum Physics
STCED
ρc2 = 4κ0ε

American Research Press
Pierre A. Millette
E l a s t o d y n a m i c so f t h e
S p a c e t i m e C o n t i n u u m
A Spacetime Physics Theory of Gravitation,Electromagnetism and Quantum Physics
– S T C E D –
Rehoboth, New Mexico, USA
— 2017 —

This book is published and distributed in agreement with the Budapest Open Ini-tiative. This means that the electronic copies of the book should always be accessedfor reading, download, copying, and re-distribution for any user free of charge. Toorder printed copies of the book, please contact the Publisher. The book can bedownloaded on-line, free of charge, from the following primary web-sites:
Progress in Physics, the American journal of physics (USA):http://ptep-online.com/index files/books.html
The Abraham Zelmanov Journal (International):http://zelmanov.ptep-online.com/books.html
Copyright © Pierre A. Millette, 2017
All rights reserved. Electronic copying, print copying and distribution of this bookfor non-commercial, academic or individual use can be made by any user withoutpermission or charge. Any part of this book being cited or used howsoever in otherpublications must acknowledge this publication. No part of this book may be re-produced in any form whatsoever (including storage in any media) for commercialuse without the prior permission of the copyright holder. Requests for permissionto reproduce any part of this book for commercial use must be addressed to theAuthor. The Author retains his rights to use this book as a whole or any part ofit in any other publications and in any way the Author sees fit. This CopyrightAgreement shall remain valid even if the Author transfers copyright of the book toanother party.
Cover image: The illustration representing a spacetime continuum deformation hasbeen prepared by the author, incorporating a helix wave from Wikimedia Commons,available atPage URL: https://commons.wikimedia.org/wiki/FileFile URL: https://upload.wikimedia.org/wikipedia/commons/d/de/Circular.Polarization.Circularly.Polarized.LightAttribution: By Dave3457 (Own work) [Public domain], via Wikimedia Commons.
This book was typeset using the LATEX typesetting system.
ISBN 978-1-59973-401-9
American Research Press, Box 141, Rehoboth, NM 87322, USAStandard Address Number: 297-5092Printed in the United States of America

Table of Contents
Foreword . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
Preface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
Chapter 1 Strained Spacetime
§1.1 Properties of the spacetime continuum . . . . . . . . . . . . . . . . . . . . . 17
§1.2 Strained spacetime and the natural decomposition of thespacetime metric tensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
§1.3 Decomposition of tensor fields in strained spacetime . . . . . . . 25
§1.4 The physicality of four-dimensional spacetime. . . . . . . . . . . . . .26
Chapter 2 Spacetime Continuum Elastodynamics
§2.1 Model of the spacetime continuum . . . . . . . . . . . . . . . . . . . . . . . . . 27
§2.2 Stress-strain relation of the spacetime continuum . . . . . . . . . . 29
§2.3 Rest-mass energy relation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
§2.4 Dilatation-distortion decomposition of the Ricci tensor . . . . . 33
§2.5 Relation between General Relativity and STCED . . . . . . . . . . 37
§2.6 The question of relativistic mass . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Chapter 3 Spacetime Wave Equations
§3.1 Kinematic relations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
§3.2 Dynamic equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
§3.3 Displacement wave equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
§3.4 Continuity equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
§3.5 Field wave equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
§3.6 Spin analysis of the wave equations . . . . . . . . . . . . . . . . . . . . . . . . 50
Chapter 4 Electromagnetism in STCED
§4.1 Electromagnetic field strength . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
§4.2 Maxwell’s equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
§4.3 Current density four-vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
§4.4 Lorenz condition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56
§4.5 Four-vector potential . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56

4 Table of Contents
§4.6 Electromagnetism and the STC volume force . . . . . . . . . . . . . . 56
§4.7 Homogeneous Maxwell equation . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
§4.8 Electromagnetic implications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Chapter 5 Energy in the Spacetime Continuum
§5.1 Strain energy density of the spacetime continuum . . . . . . . . . . 61
§5.2 Physical interpretation of the strain energy density . . . . . . . . 61
§5.3 Electromagnetic strain energy density. . . . . . . . . . . . . . . . . . . . . .63
§5.4 Electromagnetic field strain energy density and thephoton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Chapter 6 Spacetime Continuum Volume Force
§6.1 STC volume force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
§6.2 Linear elastic volume force. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
§6.3 Discussion of linear elastic volume force results . . . . . . . . . . . . 77
§6.4 Designer STC volume forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Chapter 7 Quantum Mechanical Volume Force
§7.1 Derivation of a quantum mechanical volume force . . . . . . . . . .79
§7.2 Displacements equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82
§7.3 Wave equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .83
§7.4 Alternative derivation of the quantum mechanical volumeforce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
§7.5 Alternative volume forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Chapter 8 Defects in the Spacetime Continuum
§8.1 Analysis of spacetime continuum defects . . . . . . . . . . . . . . . . . . . 93
§8.2 Defects in four-dimensional spacetime. . . . . . . . . . . . . . . . . . . . . .95
§8.3 Defects and the incompatibility tensor . . . . . . . . . . . . . . . . . . . . . 95
§8.4 Defects and the volume force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
§8.5 Defects dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Chapter 9 Dislocations in the Spacetime Continuum
§9.1 Analysis of spacetime continuum dislocations . . . . . . . . . . . . . 103
§9.2 Screw dislocations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
§9.3 Edge dislocations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110

Table of Contents 5
§9.4 Volterra discrete dislocation line . . . . . . . . . . . . . . . . . . . . . . . . . . 126
§9.5 deWit discrete dislocation line . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
§9.6 Curved dislocations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .134
Chapter 10 Disclinations in the Spacetime Continuum
§10.1 Analysis of spacetime continuum disclinations . . . . . . . . . . . . 137
§10.2 Volterra dislocations and disclinations . . . . . . . . . . . . . . . . . . . . 140
§10.3 Volterra wedge disclinations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
§10.4 Volterra twist disclinations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
§10.5 deWit discrete disclination lines . . . . . . . . . . . . . . . . . . . . . . . . . . 158
§10.6 deWit wedge disclinations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
§10.7 deWit twist disclinations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
Chapter 11 Field Theory of Defects
§11.1 Analysis of distributions of defect densities . . . . . . . . . . . . . . . 173
§11.2 Dislocation and disclination densities . . . . . . . . . . . . . . . . . . . . . 173
§11.3 Defect densities in continua . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .174
§11.4 Differential geometry of defects . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
§11.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Chapter 12 Wave-Particle Duality in STCED
§12.1 Wave-particle duality in electromagnetism . . . . . . . . . . . . . . . . 179
§12.2 Photon wavefunction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
§12.3 Physical interpretation of the photon wavefunction. . . . . . . .181
§12.4 Wave-particle duality in STCED. . . . . . . . . . . . . . . . . . . . . . . . . .182
Chapter 13 Wavefunctions, operators and measurements
§13.1 The mathematics of wavefunctions . . . . . . . . . . . . . . . . . . . . . . . .187
§13.2 Wavefunctions and operators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
§13.3 The EPR paradox and Bell’s inequality . . . . . . . . . . . . . . . . . . . 193
§13.4 Physically realistic quantum mechanics . . . . . . . . . . . . . . . . . . . 202
Chapter 14 STCED Framework for Quantum Physics
§14.1 Framework for quantum physics . . . . . . . . . . . . . . . . . . . . . . . . . . 205
§14.2 Quantization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206

6 Table of Contents
§14.3 Symmetry considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
§14.4 Bosons and fermions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .208
§14.5 Quantum electrodynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
Chapter 15 Properties of Defects in Quantum Physics
§15.1 Properties of screw dislocations . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
§15.2 Properties of edge dislocations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
§15.3 Properties of wedge disclinations. . . . . . . . . . . . . . . . . . . . . . . . . .216
§15.4 Properties of twist disclinations . . . . . . . . . . . . . . . . . . . . . . . . . . .218
Chapter 16 Defect Strain Energy in Quantum Physics
§16.1 Screw dislocation transverse strain energy . . . . . . . . . . . . . . . . 221
§16.2 Edge dislocation longitudinal strain energy . . . . . . . . . . . . . . . 224
§16.3 Edge dislocation transverse strain energy . . . . . . . . . . . . . . . . . 227
§16.4 Wedge disclination longitudinal strain energy . . . . . . . . . . . . . 233
§16.5 Wedge disclination transverse strain energy . . . . . . . . . . . . . . . 235
§16.6 Twist disclination longitudinal strain energy . . . . . . . . . . . . . . 236
§16.7 Twist disclination transverse strain energy . . . . . . . . . . . . . . . . 238
Chapter 17 Defect Interactions in Quantum Physics
§17.1 Defect interactions in STCED . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
§17.2 Displacement defect interactions . . . . . . . . . . . . . . . . . . . . . . . . . . 243
§17.3 Displacement defect interaction strain energy . . . . . . . . . . . . . 254
§17.4 Overlap interaction of multiple defects . . . . . . . . . . . . . . . . . . . . 265
Chapter 18 Quantum Physics in STCED
§18.1 Quantum particles from defects and their interactions. . . . .273
§18.2 Feynman diagrams and defect interactions . . . . . . . . . . . . . . . . 280
§18.3 Interpretation of defect strain energy interactions . . . . . . . . . 281
§18.4 Physical explanations of QED phenomena . . . . . . . . . . . . . . . . 284
§18.5 Nonlocality of quantum phenomena. . . . . . . . . . . . . . . . . . . . . . .286
§18.6 Entangled states in quantum physics. . . . . . . . . . . . . . . . . . . . . .286
Chapter 19 Spacetime Continuum Characteristics
§19.1 The spacetime Burgers dislocation constant b0 andPlanck’s constant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .287

Table of Contents 7
§19.2 Spacetime continuum constants . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
§19.3 Action in the spacetime continuum . . . . . . . . . . . . . . . . . . . . . . . 292
§19.4 Volume dilatation and rest-mass energy density . . . . . . . . . . . 294
§19.5 Dark matter and dark energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296
Chapter 20 Conclusion
§20.1 A new spacetime physics theory . . . . . . . . . . . . . . . . . . . . . . . . . . 299
§20.2 Physical explanations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .299
§20.2 Evolution of the theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
Glossary of Physical Symbols. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .313
Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336

8

Foreword
There is an old idea that the space-time background of the world canbe represented as a continuous medium. Really, the modern mechanicsof a continuum medium uses a similar mathematical basis as GeneralRelativity, but applied to a three-dimensional physical medium in a flatthree-dimensional space: see the famous four-volume A Course in Con-tinuum Mechanics by L. I. Sedov∗, or the less-comprehensive Fluid Me-chanics by L. D. Landau & E. M. Lifshitz†. Why not use this approachin General Relativity? Namely, — if the space-time curvature is con-nected with such a continuous material object as the field of gravitation,why not consider the other geometric properties of the space-time back-ground in analogy to the physical properties of a continuous medium?This approach could result in a complete geometric interpretation ofclassical mechanics as a result. This idea fired the minds of theoreticalphysicists commencing in probably that year when the General Theoryof Relativity had been introduced in 1915.
Many prominent theoretical physicists worked on this problem inthe 1930s and 1940s. L. D. Landau and E. M. Lifshitz, A. L. Zelmanov,A. Lichnerowicz, L. I. Sedov and others were among them. For example,in 1944, Zelmanov considered the evolution of cosmological models inChronometric Invariants‡, where he introduced the space viscosity, thevolume deformation, and the three-dimensional curvature in analogy tothe similar factors in the continuous media mechanics. However thismovement had ended in the 1960s: no full representation of the space-time as a continuous medium was suggested. I asked Leonid I. Sedov,on occasion, why this occurred? He answered that there was an insur-mountable obstacle along the way: many geometric properties of thespace-time did not find respective analogies in the mechanics of a con-tinuous medium; so only a very partial mathematical analogy betweena continuous medium and the four-dimensional space-time exists.
In this view, this new research done by Pierre A. Millette opens verypromising possibilities for further development of the General Theory ofRelativity. His comprehensive study on this subject is presented here.
∗Sedov L. I. A Course in Continuum Mechanics, Vols I–IV. Wolters-NoordhoffPubl., 1971.
†Landau L. D. & Lifshitz E. M. Fluid Mechanics. Pergamon Press, 1959.‡Zelmanov A. L. Chronometric Invariants: On Deformations and the Curvature
of Accompanying Space. American Research Press, 2006.

10 Foreword
Because so many new developments are contained in his book, I wouldrecommend to read it chapter-by-chapter from the very beginning.
The key idea realized by the author of this book, Pierre A. Millette,is that the space strains are somehow connected with the space-timecurvature. He then has supported this idea by an elegant mathematicalsolution, based on a plain decomposition of any 2nd rank symmetrictensor into two parts, named the dilatation-distortion decomposition.So forth, applying the decomposition to the energy-momentum stresstensor and to the Ricci tensor, he has demonstrated how the volumedilatation results in the rest-mass energy density, while the volume de-formation results in the space-time curvature and, thus, gravitation andthe gravitational field energy. So forth, he actually resolved the old-timediscussion that was so popular among the relativists commencing in the1960s: whether gravitational waves are the waves of the space-time cur-vature or the waves of the volume deformation of space? Now, lookingat Millette’s results, we see that this question was an actual tautology,because the one results in the other, and vice versa.
The same decomposition is then applied to the symmetric term ofthe electromagnetic field tensor, thus resulting in the “strained” elec-tromagnetic field theory, with many interesting sequences.
Among the other derived results, which are many in the book (alldeveloped on the same basis of the aforementioned decomposition), Iwould emphasise the elastic volume force, the quantum mechanical vol-ume force, the linear and rotational defects of the space-time, the space-time dislocations and disclinations, the wave function and the basics ofquantum mechanics that takes the aforementioned decomposition andits sequences into account, the particle physics which, in the frameworkof the theory, associates known types of the elementary particles withrespective defects of the space-time. . . All these and other problems areexplained in the other chapters of the book.
As a result, I see that Pierre A. Millette has created an absolutelyoriginal extension of Einstein’s version of the General Theory of Relativ-ity. This extension, having the same Riemannian basis as the “classical”General Relativity, meanwhile provides the closest analogy between thespace-time background and a continuous medium.
I therefore very much hope that the Spacetime Continuum Elasto-dynamics — the new extension of the “classical” General Theory ofRelativity — will turn, again, the attention of scientists to the space-time analogy with a continuous medium. This new extension clearlyshows that the General Theory of Relativity in its “classical form” in-troduced already by Einstein is not something fossilized but still is a

Foreword 11
wide field for further development and extensions even without the useof extra-dimensions or modifications of the Riemannian mathematicalbasis.
Puschino, November 16, 2016 Dmitri Rabounski
Editor-in-Chief
Progress in Physics

12

Preface
This book is about spacetime physics, in particular as it concerns grav-itation, electromagnetism and quantum physics. The purpose of thisbook is to lay the theoretical foundations of the Elastodynamics ofthe Spacetime Continuum, allowing physicists to study and performresearch in this new area of spacetime physics.
The theory you will be exploring in this book has been developedover many decades, and it is an ongoing work in progress. The de-velopment of the concepts started in the late-70s during my graduatestudies in Physics. Modern physics, especially electromagnetism, quan-tum theory and the relativity theories was exciting, and so were thenumerous challenges of what was not known, and in many cases, stillis not known 40 years later. This theory was molded by the questionsthat did not have answers – it provides some answers, but still, manyquestions remain to be answered.
The idea of the particulate nature of longitudinal vibrations alongthe direction of propagation was first conceived in 1979. The resolu-tion of wave-particle duality that will be described in this book fol-lowed thereafter. The identification of rest-mass with a change in thevolume of spacetime was obtained in 1982. Similarly, electromagneticwaves were identified with massless transverse waves propagating in thespacetime continuum that same year.
The proportionality of mass to the trace of the strain tensor wasderived in 1983, as expressed in the equation given by (2.24), ρc2 =4κ0 ε, an equation that is as important to STCED as E = mc2 is torelativistic physics. The application of continuum mechanics to thespacetime continuum was developed, and the rest sorted out: energydensity, electromagnetism, the wave equations, quantum physics, andso on... all while working full time in the high-technology sector.
Publishing my research proved to be difficult. As was to be expected,publishing a new spacetime model that is not mainstream was problem-atic. As pointed out by Thomas Kuhn [158], many career physicists feelthreatened by new paradigms.
The core of STCED was summarized into a series of papers, with thefirst one corresponding to the early sections of this book [181]. Aftera number of rejections, I had the good fortune of submitting my pa-per to the journal Progress in Physics, which is an open-access journalpublished and distributed in accordance with the Budapest Open Ini-tiative [221]. Progress in Physics publishes papers on advanced studies

14 Preface
in theoretical and experimental physics, including related themes frommathematics. Editor-in-Chief Dr. Dmitri Rabounski accepted and pub-lished my paper and subsequent papers. I am grateful to Progress inPhysics for being available to independent scientists to publish theirwork, independently of the pressures from academia for conformance tothe mainstream of physics. This has resulted in a fruitful collaborationwith the journal.
The difficulty in writing such a book is to clearly convey the newideas and understanding that come with a new theory. The language ofphysics is mathematics, but physics is not pure mathematics. Mathe-matics needs to be guided by physical considerations, otherwise physi-cal theories are developed that have no connection to the real physicalworld.
Physics also needs to be able to describe the physical world in aspoken language such as english or francais and, in so doing, providean interpretation of the mathematical language used and of the physicsof the theory. There is a complex interplay between the two as spo-ken language can end up driving the mathematical language as is seentoday in some areas of physics. However, at the end of the day, themathematical language must be prime, not its interpretation.
This highlights the importance of the understanding attached to themathematical language used in physics, leading to a correct interpreta-tion of what the mathematics are saying. In this book, care is takento provide an understanding in spoken language of the mathematicallanguage used in the development of STCED to ensure that confusionin its interpretation is minimized.
We will derive a large number of new equations and relations in thisbook. It is easy to get lost in that number and miss the importantequations derived from the theory. Consequently, we will be puttingboxes around some of the important new results in the early chaptersto highlight their significance to the reader.
A note on continuum mechanics terminology. The subjectmatter covered in this book covers many fields of physics, including gen-eral relativity, electromagnetism, quantum theory, elasticity and con-tinuum mechanics. The terminology used in the literature is in generalconsistent across the different fields.
However, there are some differences within continuum mechanics, inparticular with respect to defect theory, where there are some inconsis-tencies in the terminology used in the literature. This is not surprisinggiven that the development of defect theory was initiated in the twenti-eth century and is still an area of active research. We will point out the

Preface 15
inconsistencies in the relevant sections of the book as the terminology isencountered. A glossary of the self-consistent physical symbols used inthis book is included at the end of the book (see page 313) to facilitatethe reading of this book.
A note on spacetime continuum constants. Note that in thisbook, we denote the STCED spacetime continuum constants with adiacritical mark over the symbols (for example κ0, λ0, µ0, ρ0) to differ-entiate them from similar symbols used in other fields of physics. Thisallows us to retain existing symbols such as µ0 for the electromagneticpermeability of free space, compared to the Lame elastic constant µ0
used to denote the spacetime continuum shear modulus.A note on units and constants in equations. In general rel-
ativity and in quantum electrodynamics, it is customary to use “ge-ometrized units” and “natural units” respectively, where the principalconstants are set equal to 1. The use of these units facilitates calcula-tions since cumbersome constants do not need to be carried throughoutderivations. However, the absence of constants also obscures the physicsof the equations. In this book, all constants are retained in the deriva-tions, to provide physical insight into the nature of the equations underdevelopment.
In addition, we use rationalized MKSA units (Systeme Interna-tional) for electromagnetism, as the traditionally used Gaussian unitsare gradually being replaced by rationalized MKSA units in more recenttextbooks (see for example [13]).
With these clarifications, we are now ready to tackle the Elastody-namics of the Spacetime Continuum.
Ottawa, September 5, 2016 Pierre A. Millette

16

Chapter 1
Strained Spacetime
§1.1 Properties of the spacetime continuum
The publication of the General Theory of Relativity (GTR) by AlbertEinstein in 1915 [77] was a watershed moment in our understandingof spacetime and gravitation. This led to an ever growing cascade ofresearch and publications that continues unabated to this day. Einsteinhimself spent his last forty years of research until his death in 1955working mostly on his search for a unified field theory of gravitationand electromagnetism.
General relativity is essentially a theory of the geometry of space-time, which is generated by the energy-momentum present in spacetime.Gravitation is then simply the effect of that geometry on the massespresent in spacetime. This can be represented as
Gravitation
6
STC Geometry
6
Energy-momentum
Mathematically, this is described by the deceptively compact Ein-stein field equations
Gµν = −κ Tµν (1.1)
where Gµν is the Einstein tensor describing the geometry of spacetime,Tµν represents the energy-momentum in the spacetime and κ = 8πG/c4
where G is the gravitational constant and c is the speed of light. Theabove equation actually represents 16 separate non-linear coupled par-tial differential equations, which belies the simplicity and elegance of(1.1).
Unlike Einstein, who was searching for a spacetime geometrical de-scription of his unified field theory, in this book, we consider the physicsof the spacetime continuum, to develop a theory that brings gravitation,

18 Chapter 1 Strained Spacetime
electromagnetism and quantum physics under one umbrella descriptionwhich we call spacetime physics. This provides an alternate perspectiveto the problem of describing the dynamics of the spacetime continuum(STC ), separate from the geometrical description pursued over the lastone hundred years of GTR. This perspective derives from general rela-tivity, starting with the Einstein field equations (1.1), and leads us tounderstand the geometrical description of GTR.
§1.1.1 Stresses and strains in the spacetime continuum
The first inkling that there is more to spacetime than just its geometry,is the representation of the energy-momentum in Einstein’s field equa-tions (1.1) above: Tµν is called the energy-momentum stress tensor.The word stress implies that forces are being applied to the space-time continuum by the energy-momentum present in its structure. Atthe same time, this also implies that spacetime is indeed a continuumthat is warped by the presence of energy-momentum. From continuummechanics, we know that the application of stresses to the spacetimecontinuum must result in strains in its structure, hence the terminologystrained spacetime. We will derive this result in the next section §1.2.
The deformation of the spacetime continuum is a physical process,as shown by the deflection of light by the sun. Einstein in defending histheory in 1918 stated [78]:
Whereas according to the special theory of relativity a part ofspace without matter and without electromagnetic field seemsto be completely empty, that is to say not characterised by anyphysical properties, according to the general theory of relativityeven space that is empty in this sense has physical properties.
More than forty years later, in 1952, Einstein wrote in Appendix V,Relativity and the Problem of Space, of his book on Relativity [79]:
There is no such thing as an empty space, i.e. a space withoutfield. Space-time does not claim existence on its own, but onlyas a structural quality of the field.
Einstein, throughout his search for a unified field theory of the gravi-tational and electromagnetic fields after the publication of his GeneralTheory of Relativity, recognized that spacetime has physical propertiesof its own [154]. Hence general relativity implicitly leads us to the real-ization that the spacetime continuum must be a deformable continuum,where the deformations are physical in nature.
The assignment of physical dynamic properties to the spacetime ofgeneral relativity has been considered previously. For example, Sakha-

§1.1 Properties of the spacetime continuum 19
rov [233] considers a “metrical elasticity” of space in which generalizedforces oppose the curving of space. Blair [20, p. 3–4] notes the very largevalue of the proportionality constant in the inverse of (1.1). This leadshim to point out that spacetime is an elastic medium that can sup-port waves, but its extremely high stiffness means that extremely smallamplitude waves have a very high energy density. He notes that thecoupling constant c4/8πG can be considered as a modulus of elasticityfor spacetime, and identifies the quantity c3/G with the characteris-tic impedance of spacetime [20, p. 45]. Tartaglia et al have recentlyexplored strained spacetime in the cosmological context, as an exten-sion of the spacetime Lagrangian to obtain a generalized Einstein equa-tion [254,255].
The physical properties of the spacetime continuum can be tracedinto other areas of physical theory. The vacuum of electromagnetic the-ory can also be identified with the spacetime continuum. This vacuumhas various physical properties such as the characteristic impedance ofthe vacuum Z0 = 376.73 Ω, the electromagnetic permittivity of the vac-uum ε0 = 8.854× 10−12 F m−1, the electromagnetic permeability of thevacuum µ0 = 12.566 × 10−7 N A−2 and the speed of electromagneticwaves in vacuo c = 2.998 × 108 m s−1. These are physical electromag-netic properties of the spacetime continuum observed during physicalelectromagnetic processes in the vacuum of space that hint at a connec-tion between general relativity and electromagnetism via the spacetimecontinuum.
At the other end of the distance scale, we encounter the vacuumof quantum physics [23, 190, 191]. The vacuum of quantum electrody-namics is characterized by a constant creation/annihilation of (virtual)particles, corresponding to the state of constant vibration of the space-time continuum due to its energy-momentum content. The quantumvacuum also provides a physical framework for various quantum effectssuch as vacuum polarization, zero-point energy, the Casimir force, theAharonov-Bohm effect, and is the seat of physical quantum processes inthe vacuum that again hint at a connection between general relativityand quantum physics via the spacetime continuum. The omnipresentquantum vacuum is in effect the spacetime continuum, seen from upclose, with its microscopic properties made more evident by the micro-scopic scale of quantum phenomena.
In all of these cases, from the macroscopic to the microscopic, thespacetime continuum is not an empty canvas, but rather has physicalproperties of its own. It is understandable that physicists and mathe-maticians (not to mention philosophers) do not all have the same per-

20 Chapter 1 Strained Spacetime
spective on the emptiness of the vacuum (see [25,234]). One can alwayscreate an empty underlying mathematical structure used to “measure”the deviations of the spacetime continuum from a reference state, butthere is no doubt that the spacetime continuum of physical theory ischaracterized by physical dynamic properties.
§1.1.2 Deformations of the spacetime continuum
Recognizing that the spacetime continuum of general relativity is a de-formable continuum leads to a different approach to characterize thedynamics of the spacetime continuum. As seen in section §1.1.1, theenergy-momentum stress tensor leads to strains in the spacetime con-tinuum and the strains result in the displacement of the elements of thespacetime continuum from equilibrium, corresponding to the spacetimecontinuum (STC ) deformations. The spacetime continuum itself is themedium that supports those deformations and is consequently deformedby the energy-momentum in its structure. This can be represented as
STC Deformations
6
Energy-momentum
The methods of continuum mechanics applied to the spacetime con-tinuum are used for the analysis of the STC deformations in four dimen-sions. This allows us to study the behaviour of the spacetime contin-uum at a local level, as it is being deformed by the presence of energy-momentum. The analysis can be defined both for small infinitesimaldeformations and for large finite deformations.
The combination of all STC deformations generates the geometryof the spacetime continuum used in general relativity. The geometry ofthe spacetime continuum of general relativity resulting from the energy-momentum stress tensor can thus be seen to be a representation of thedeformations of the spacetime continuum resulting from the strains gen-erated by the energy-momentum stress tensor. And as before, gravita-tion is then simply the effect of that geometry on the masses present inspacetime.
The analysis of STC deformations is thus seen to be an additionallayer of details in our understanding of the dynamics of the spacetimecontinuum. Consequently, general relativity must be used in combina-tion with continuum mechanics for a complete description of the dy-

§1.2 Strained spacetime and the metric tensor decomposition 21
namics of the spacetime continuum, from the microscopic to the macro-scopic. This can be represented as
Gravitation
6
STC Geometry
6
STC Deformations
6
Energy-momentum
This theory is referred to as the Elastodynamics of the SpacetimeContinuum (STCED) (see Millette [180–188]). In this theory, the space-time continuum is analyzed within the framework of continuum me-chanics and general relativity. Hence, while general relativity can bedescribed as a top-down theory of the spacetime continuum, the Elasto-dynamics of the Spacetime Continuum can be described as a bottom-uptheory of the spacetime continuum. STCED provides a fundamentaldescription of the processes underlying the dynamics of the spacetimecontinuum.
Given that the combination of all deformations present in the space-time continuum generates its geometry, STCED thus provides a de-scription complementary to that of general relativity. While GTR isconcerned with modeling the resulting geometry of the spacetime contin-uum, STCED is used to analyze the deformations generating that geom-etry. General relativity is thus the theory used to provide a macroscopic,large-scale description of the spacetime continuum, while STCED isused to provide a microscopic, small- to intermediate-scale descriptionof the fundamental spacetime continuum processes, reaching down tothe quantum level. The unification of general relativity and quantumphysics is accomplished via STCED, the theory of the Elastodynamicsof the Spacetime Continuum.
§1.2 Strained spacetime and the natural decomposition of thespacetime metric tensor
We start by demonstrating from first principles that spacetime is strai-ned by the presence of mass. In addition, we find that this provides a

22 Chapter 1 Strained Spacetime
natural decomposition of the spacetime metric tensor of general relativ-ity into a background and a dynamical part, and of spacetime tensorfields, both of which are still unresolved and are the subject of contin-uing investigations (see for example [46, 47, 63, 157, 250]). We find thatthe presence of mass results in strains in the spacetime continuum, andthat those strains correspond to the dynamical part of the spacetimemetric tensor.
In section §1.1.1, we noted that the energy-momentum stress tensorleads to strains in the spacetime continuum, and we mentioned that wewould derive this result in this section. This we accomplish by usingthe time-honoured tradition in physics of analyzing such problems byintroducing test objects, in this case a test mass, into a well-understoodsituation, and evaluating the consequences of this action. As a result,we will also solve a long-standing problem of general relativity.
There is no straightforward definition of local energy density of thegravitational field in general relativity [271, see p. 84, p. 286] [46, 140,251]. This arises because the spacetime metric tensor includes boththe background spacetime metric and the local dynamical effects of thegravitational field. No natural way of decomposing the spacetime metrictensor into its background and dynamical parts is known.
In this section, we propose a natural decomposition of the space-time metric tensor into a background and a dynamical part. We alsodemonstrate that the energy-momentum stress tensor generates strainsin the spacetime continuum. This is derived from first principles byintroducing a test mass in the spacetime continuum described by thebackground metric, and calculating the effect of this test mass on themetric.
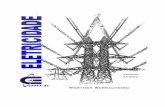
Consider the diagram of Figure 1.1. Points A and B of the spacetimecontinuum, with coordinates xµ and xµ+dxµ respectively, are separatedby the infinitesimal line element
ds2 = gµν dxµdxν (1.2)
where gµν is the metric tensor describing the background state of thespacetime continuum.
We now introduce a test mass in the spacetime continuum and ex-amine the consequences of this action. This results in the displacementof point A to A, where the displacement is written as uµ. Similarly, thedisplacement of point B to B is written as uµ + duµ. The infinitesimal
line element between points A and B is given by ds2.
By reference to Figure 1.1, the infinitesimal line element ds2
can be

§1.2 Strained spacetime and the metric tensor decomposition 23
Figure 1.1: Effect of a test mass on the background metric tensor
A : xµ
B : xµ + dxµ
ds2
A : xµ + uµ
B : xµ + dxµ + uµ + duµ
ds2
uµ
uµ + duµ
expressed in terms of the background metric tensor as
ds2
= gµν(dxµ + duµ)(dxν + duν). (1.3)
Multiplying out the terms in parentheses, we get
ds2
= gµν(dxµdxν + dxµduν + duµdxν + duµduν). (1.4)
Expressing the differentials du as a function of x, this equation becomes
ds2
= gµν(dxµdxν + dxµ uν ,α dxα + uµ,α dx
αdxν+
+uµ,α dxα uν ,β dx
β)(1.5)
where the comma (,) denotes partial differentiation. Rearranging thedummy indices, this expression can be written as
ds2
= (gµν + gµα uα,ν + gαν u
α,µ + gαβ u
α,µu
β,ν) dxµdxν (1.6)
and lowering indices, the equation becomes
ds2
= (gµν + uµ,ν + uν,µ + uα,µuα,ν) dxµdxν . (1.7)

24 Chapter 1 Strained Spacetime
The expression (uµ;ν+uν;µ+uα;µuα;ν) is equivalent to the definitionof the strain tensor εµν of continuum mechanics. The strain εµν isexpressed in terms of the displacements uµ of a continuum through thekinematic relation [237, see p. 149] [104, see pp. 23–28]:
εµν = 12 (uµ;ν + uν;µ + uα;µuα
;ν) (1.8)
where the semicolon (;) denotes covariant differentiation. Substitutingfor εµν from (1.8) into (1.7), we get
ds2
= (gµν + 2 εµν) dxµdxν . (1.9)
Setting [104, see p. 24]
gµν = gµν + 2 εµν (1.10)
then (1.9) becomes
ds2
= gµν dxµdxν (1.11)
where gµν is the metric tensor describing the spacetime continuum withthe test mass.
From (1.9) and (1.2), we obtain
ds2
= ds2 + 2 εµν dxµdxν . (1.12)
The change in the line element resulting from the generated strains isthen given by
12
(ds
2− ds2
)= εµν dx
µdxν . (1.13)
Given that gµν is the background metric tensor describing the back-ground state of the continuum, and gµν is the spacetime metric tensordescribing the final state of the continuum with the test mass, then 2 εµνmust represent the dynamical part of the spacetime metric tensor dueto the test mass:
gdynµν = 2 εµν (1.14)
with a corresponding line element
ds2dyn = 2 εµν dx
µdxν . (1.15)
We are thus led to the conclusion that applied stresses due to thepresence of energy-momentum result in strains in the spacetime contin-uum. Those strains correspond to the dynamical part of the spacetime

§1.3 Decomposition of tensor fields in strained spacetime 25
metric tensor. In addition, we obtain a natural way of decomposingthe spacetime metric tensor into a background spacetime metric anda dynamical part corresponding to the local dynamical effects of thegravitational field, given by twice the strain tensor.
It is important to note that these results also apply to the spacetimeof general relativity.
§1.3 Decomposition of tensor fields in strained spacetime
In this section, we consider the decomposition of spacetime tensor fieldsof rank 2. As opposed to vector fields which can be decomposed intolongitudinal (irrotational) and transverse (solenoidal) components us-ing the Helmholtz representation theorem [237, see pp. 260–261], thedecomposition of spacetime tensor fields can be done in many ways (seefor example [47,63,157,250]).
The application of continuum mechanics to the spacetime contin-uum offers a natural decomposition of tensor fields, in terms of dilata-tions and distortions [104, see pp. 58–60]∗. A dilatation corresponds toa change of volume of the spacetime continuum without a change ofshape while a distortion corresponds to a change of shape of the space-time continuum without a change in volume. As we will see in chapter2, dilatations correspond to longitudinal displacements and distortionscorrespond to transverse displacements of the elements of the spacetimecontinuum [237, see p. 260].
The strain tensor εµν can thus be decomposed into a strain deviationtensor eµν (the distortion) and a scalar es (the dilatation) accordingto [104, see pp. 58–60]:
εµν = eµν + esgµν (1.16)
whereeµν = εµν − esδµν (1.17)
es = 14 ε
αα = 1
4 ε. (1.18)
Similarly, the energy-momentum stress tensor Tµν is decomposedinto a stress deviation tensor tµν and a scalar ts according to
Tµν = tµν + tsgµν (1.19)
where similarlytµν = Tµν − tsδµν (1.20)
∗see footnote on page 28 on the terminology used.

26 Chapter 1 Strained Spacetime
ts = 14 T
αα = 1
4 T. (1.21)
This decomposition of spacetime tensor fields of rank 2 in termsof dilatation and distortion components allows us to also decomposerelations involving these tensor fields into separate dilatation and dis-tortion relations. We will apply this decomposition to the Ricci tensorin section §2.4 once the basis of the theory of the Elastodynamics of theSpacetime Continuum has been developed in the next chapter 2.
§1.4 The physicality of four-dimensional spacetime
Minkowski [192, 213] first introduced the concept of a four-dimensionalspacetime and the description of particles in this spacetime as worldlinesin 1908. This has given rise to the question whether four-dimensionalspacetime is real or a mathematical abstraction. Eddington [213] con-sidered this question in 1921:
It was shown by Minkowski that all these fictitious spaces andtimes can be united in a single continuum of four dimensions.The question is often raised whether this four-dimensional space-time is real, or merely a mathematical construction; perhaps itis sufficient to reply that it can at any rate not be less real thanthe fictitious space and time which it supplants.
Petkov [212, 213] provides a cogent summary of Minkowski’s paper.Worldlines of particles at rest are vertical straight lines in a space−ctdiagram, while particles moving at a constant velocity v are obliquelines and accelerated particles are curved lines. This provides a physi-cal explanation for length contraction as a manifestation of the realityof a particle’s extended worldline, where the cross-section measured byan observer moving relative to it (i.e. at an oblique line in the space−ctdiagram), creates the difference in perceived length between a body atrest and one in movement. Minkowski’s work demonstrates the physi-cality of four-dimensional spacetime, and that indeed, four-dimensionalphysics is spacetime geometry.

Chapter 2
Spacetime Continuum Elastodynamics
§2.1 Model of the spacetime continuum
In this chapter, we derive the Elastodynamics of the Spacetime Contin-uum by applying continuum mechanical results to strained spacetime.Based on this model, a stress-strain relation is derived for the spacetimecontinuum. We apply that stress-strain relation to show that rest-massenergy density arises from the volume dilatation of the spacetime con-tinuum. Then we apply the natural decomposition of tensor fields instrained spacetime, in terms of dilatations and distortions, to the Riccitensor of general relativity, and conclude with a demonstration of therelation between general relativity and STCED.
The model of the spacetime continuum used in the theory of the Elas-todynamics of the Spacetime Continuum is an extension of the generalrelativistic spacetime continuum based on continuum mechanics. Thespacetime continuum is modelled as a four-dimensional differentiablemanifold endowed with a metric gµν . It is a continuum that can un-dergo deformations and support the propagation of such deformations.A continuum that is deformed is strained.
An infinitesimal element of the unstrained continuum is character-ized by a four-vector xµ, where µ = 0, 1, 2, 3. The time coordinate isx0 ≡ ct.
A deformation of the spacetime continuum corresponds to a stateof the spacetime continuum where its elements are displaced from theirunstrained positions∗. Under deformation, an infinitesimal element atxµ is displaced to a new position xµ +uµ, where uµ is the displacementof the infinitesimal element from its unstrained position xµ.
The spacetime continuum is approximated by a deformable linearelastic medium that obeys Hooke’s law. For a general anisotropic con-tinuum in four dimensions [104, see pp. 50–53],
Eµναβ εαβ = Tµν (2.1)
where εαβ is the strain tensor, Tµν is the energy-momentum stress ten-sor, and Eµναβ is the elastic moduli tensor.
∗As used in most continuum mechanics textbooks (see for example [43,115]).

28 Chapter 2 Spacetime Continuum Elastodynamics
The spacetime continuum is further assumed to be isotropic and ho-mogeneous. This assumption is in agreement with the conservation lawsof energy-momentum and angular momentum as expressed by Noether’stheorem [147, see pp. 23–30]. For an isotropic medium, the elastic mod-uli tensor simplifies to [104]:
Eµναβ = λ0(gµνgαβ) + µ0(gµαgνβ + gµβgνα) (2.2)
where λ0 and µ0 are the Lame elastic constants of the spacetime con-tinuum. µ0 is the shear modulus (the resistance of the continuum todistortions) and λ0 is expressed in terms of κ0, the bulk modulus (theresistance of the continuum to dilatations) according to
λ0 = κ0 − µ0/2 (2.3)
in a four-dimensional continuum.The relation between κ, and µ and λ in N dimensions is given by
[149, p. 769]
κ =2µ+Nλ
N. (2.4)
Another elastic constant that is used in the literature is Poisson’s ratioν given by [149, p. 770]
ν =λ
2µ+ (N − 1)λ. (2.5)
We do not use Poisson’s ratio in this book, but this relation may beneeded when converting equations from the literature.
A dilatation, given by the divergence of the displacements, corre-sponds to a change of volume of the spacetime continuum without achange of shape∗ while a distortion, given by the gradient of the dis-placements, corresponds to a change of shape (shear) of the spacetimecontinuum without a change in volume†. As we saw in §1.3, spacetimetensor fields can be decomposed in terms of dilatation and distortioncomponents which allows us to also decompose relations involving thesetensor fields into separate dilatation and distortion relations.
∗As used in all continuum mechanics textbooks.†As used for example in [59, 104, 163]. This is one of the terms where there
are other definitions given by some authors in defect theory. For example, Volterra[269], in his study of elastic deformations of multiply-connected solids in 1907 calledthem distortions (also used by [219] in his extension of Volterra’s work), but thatterminology was subsequently changed to dislocations and disclinations.

§2.2 Stress-strain relation of the spacetime continuum 29
We remind the reader that in this book, we denote the STCEDspacetime continuum constants κ0, λ0, µ0, ρ0 with a diacritical markover the symbols to differentiate them from similar symbols used inother fields of physics. This allows us to retain existing symbols suchas µ0 for the electromagnetic permeability of free space, compared tothe Lame elastic constant µ0 used to denote the spacetime continuumshear modulus.
§2.2 Stress-strain relation of the spacetime continuum
The introduction of strains in the spacetime continuum as a result ofthe energy-momentum stress tensor allows us to use by analogy resultsfrom continuum mechanics, in particular the stress-strain relation, toprovide a better understanding of strained spacetime. The stress-strainrelation is a characteristic of a continuum, and for a linear elastic con-tinuum obeying Hooke’s law, the stress-strain relation is linear. Oneof the consequences of linearity is that the principle of superposition isapplicable, as observed in physical laws [227].
By substituting (2.2) into (2.1), we obtain the stress-strain relationfor an isotropic and homogeneous spacetime continuum
2µ0εµν + λ0g
µνε = Tµν (2.6)
where
ε = εαα (2.7)
is the trace of the strain tensor obtained by contraction. The volumedilatation ε is defined as the change in volume per original volume [237,see pp. 149–152] and is an invariant of the strain tensor.
It is interesting to note that the structure of (2.6) is similar to thatof the field equations of general relativity, viz.
Rµν − 12 g
µνR = −κ Tµν (2.8)
where κ = 8πG/c4 and G is the gravitational constant. This strength-ens our conjecture that the geometry of the spacetime continuum canbe seen to be a representation of the deformations of the spacetime con-tinuum resulting from the strains generated by the energy-momentumstress tensor. We will come back to the relation between STCED andgeneral relativity in section §2.5 in this chapter.
Using (1.16) to (1.21) into the strain-stress relation of (2.6) and mak-ing use of (2.10) and (2.3), we obtain separated dilatation and distortion

30 Chapter 2 Spacetime Continuum Elastodynamics
relations respectively:
dilatation : ts = 2(µ0 + 2λ0)es = 4κ0es = κ0ε
distortion : tµν = 2µ0eµν .
(2.9)
The distortion-dilatation decomposition is evident in the dependence ofthe dilatation relation on the bulk modulus κ0 and of the distortionrelation on the shear modulus µ0. The dilatation relation of (2.9) corre-sponds to rest-mass energy as we will see in the next section §2.3, whilethe distortion relation is traceless and thus massless, and correspondsto shear transverse waves.
This decomposition of spacetime continuum deformations into amassive dilatation and a massless transverse wave distortion provides amechanism for wave-particle duality. This could explain why dilatation-measuring apparatus measure the massive “particle” properties of thedeformation, while distortion-measuring apparatus measure the mass-less transverse “wave” properties of the deformation. Wave-particleduality will be considered in more details in chapter 12.
§2.3 Rest-mass energy relation
We now derive a relation for rest-mass energy density that clarifies thenature of mass in the spacetime continuum of STCED. As derived in(2.6), the stress-strain relation for an isotropic and homogeneous space-time continuum can be written as:
2µ0εµν + λ0g
µνε = Tµν .
The contraction of (2.6) yields the relation
2(µ0 + 2λ0)ε = Tαα ≡ T. (2.10)
The time-time component T 00 of the energy-momentum stress tensorrepresents the total energy density given by [206, see pp. 37–41]
T 00(xk) =
∫d3pEp f(xk,p) (2.11)
where Ep = (ρ2c4 + p2c2)1/2, ρ is the rest-mass energy density, c is thespeed of light, p is the momentum 3-vector and f(xk,p) is the distri-bution function representing the number of particles in a small phase

§2.3 Rest-mass energy relation 31
space volume d3x d3p. The space-space components T ij of the energy-momentum stress tensor represent the stresses within the medium givenby
T ij(xk) = c2∫d3p
pipj
Epf(xk,p) . (2.12)
They are the components of the net force acting across a unit area of asurface, across the xi planes in the case where i = j. In the simple caseof a particle, they are given by [72, see p. 117]
T ii = ρ vivi (2.13)
where vi are the spatial components of velocity. If the particles aresubjected to forces, these stresses must be included in the energy-momentum stress tensor.
Explicitly separating the time-time and the space-space components,the trace of the energy-momentum stress tensor is written as
Tαα = T 00 + T ii . (2.14)
Substituting from (2.11) and (2.12), using the Minkowski metric ηµν ofsignature (+ – – –), we obtain:
Tαα(xk) =
∫d3p
(Ep −
p2c2
Ep
)f(xk,p) (2.15)
which simplifies to
Tαα(xk) = ρ2c4∫d3p
f(xk,p)
Ep. (2.16)
Using the relation [206, see p. 37]
1
Ehar(xk)=
∫d3p
f(xk,p)
Ep(2.17)
in equation (2.16), we obtain the relation
Tαα(xk) =ρ2c4
Ehar(xk)(2.18)
where Ehar(xk) is the Lorentz invariant harmonic mean of the energy
of the particles at xk.

32 Chapter 2 Spacetime Continuum Elastodynamics
In the harmonic mean of the energy of the particles Ehar, the mo-mentum contribution p will tend to average out and be dominated bythe mass term ρc2, so that we can write
Ehar(xk) ∼= ρc2 . (2.19)
Substituting for Ehar in (2.18), we obtain the relation
Tαα(xk) ∼= ρc2 . (2.20)
The total rest-mass energy density of the system is obtained by inte-grating over all space:
Tαα =
∫d3x Tαα(xk) . (2.21)
The expression for the trace derived from (2.14) depends on thecomposition of the sources of the gravitational field. Considering theenergy-momentum stress tensor of the electromagnetic field, we canshow that Tαα = 0 as expected for massless photons, while
T 00 =ε02
(E2 + c2B2
)is the total energy density, where ε0 is the electromagnetic permittivityof free space, and E and B have their usual significance (see section§5.3).
Hence Tαα corresponds to the invariant rest-mass energy densityand we write
Tαα = T = ρc2 (2.22)
where ρ is the rest-mass density. Using (2.22) into (2.10), the relationbetween the invariant volume dilatation ε and the invariant rest-massenergy density becomes
2(µ0 + 2λ0)ε = ρc2 (2.23)
or, in terms of the bulk modulus κ0,
ρc2 = 4κ0 ε . (2.24)
This equation demonstrates that rest-mass energy density arisesfrom the volume dilatation of the spacetime continuum. The rest-massenergy is equivalent to the energy required to dilate the volume of the

§2.4 Ricci tensor dilatation-distortion decomposition 33
spacetime continuum. It is a measure of the energy stored in the space-time continuum that is perceived as mass. The volume dilatation is aninvariant, as is the rest-mass energy density.
This is an important result as it demonstrates that mass is not in-dependent of the spacetime continuum, but rather mass is part of thespacetime continuum fabric itself. As we will see in chapter 3, mass re-sults from the dilatation of the spacetime continuum in the longitudinalpropagation of energy-momentum in the spacetime continuum. Matterdoes not warp spacetime, but rather, matter is warped spacetime (i.e.dilated spacetime). The universe consists of the spacetime continuumand energy-momentum that propagates in it by deformation of its (i.e.STC ) structure.
Another important consequence of this relation is that it providesa definition of mass. The definition of mass is still one of the openquestions in physics, with most authors adopting an indirect definitionof mass based on the ratio of force to acceleration [137, see chapter 8].However, mass is one of the fundamental dimensions of modern systemsof units, and as such, should be defined directly, not indirectly. This isa reflection of the current lack of understanding of the nature of mass inmodern physics. STCED provides a direct physical definition of mass:mass is the invariant change in volume of spacetime in the longitudinalpropagation of energy-momentum in the spacetime continuum.
§2.4 Dilatation-distortion decomposition of the Riccitensor
In this section, we apply the natural decomposition of spacetime contin-uum tensor fields, based on the continuum mechanical decompositionof tensors in terms of dilatations and distortions, to the Ricci tensorused in general relativity. From this, we will show that this results ina separation of the field equations of general relativity into a dilatationrelation and a distortion relation. We will then evaluate these equationsin the weak field approximation to show that the longitudinal dilatationmass relation leads to Poisson’s equation for a newtonian gravitationalpotential, and that the transverse distortion wave relation leads to thelinearized field equation of gravity in the Transverse Traceless gauge.Hence the results derived in STCED also apply to general relativity.
As shown in section §1.3, the stress tensor Tµν of general relativitycan be separated into a stress deviation tensor tµν and a scalar ts ac-cording to (1.19), (1.20) and (1.21). The Ricci curvature tensor Rµν canalso be separated into a curvature deviation tensor rµν (corresponding

34 Chapter 2 Spacetime Continuum Elastodynamics
to a distortion) and a scalar rs (corresponding to a dilatation) accordingto
Rµν = rµν + rs gµν (2.25)
where similarlyrµν = Rµν − rs δµν (2.26)
rs = 14 R
αα = 1
4 R (2.27)
where R is the contracted Ricci curvature tensor.Using (1.19) to (1.21) and (2.25) to (2.27) into the field equations of
general relativity [271, see p. 72],
Rµν − 12 g
µνR = −κTµν (2.28)
where again κ = 8πG/c4 and G is the gravitational constant, we obtaina separation of the field equations of general relativity into dilatationand distortion relations respectively:
dilatation : rs = −κ ts
distortion : rµν = κ tµν .(2.29)
The dilatation relation of (2.29) can also be expressed as
R = −κ T. (2.30)
The distortion-dilatation separation of tensor fields is thus also ap-plicable to the field equations of general relativity, resulting in separateddilatation and distortion relations. This result follows from the geom-etry of the spacetime continuum used in general relativity being gen-erated by the combination of all deformations present in the spacetimecontinuum as seen previously.
§2.4.1 Weak field approximation
We now evaluate these separated field equations (2.29) in the weak fieldapproximation to show that these relations satisfy the massive longitu-dinal dilatation and massless transverse distortion results of STCED.
In the weak field approximation [193, see pp. 435–441], the metrictensor gµν is written as gµν = ηµν +hµν where ηµν is the flat spacetimediagonal metric with signature (+ – – –) and |hµν | 1. The connectioncoefficients are then given by
Γµαβ = 12 η
µν(hαν,β + hβν,α − hαβ,ν) (2.31)

§2.4 Ricci tensor dilatation-distortion decomposition 35
or, after raising the indices,
Γµαβ = 12 (hα
µ,β + hβ
µ,α − hαβ,µ). (2.32)
The Ricci tensor is also linearized to give
Rµν = Γαµν,α − Γαµα,ν (2.33)
which becomes
Rµν = 12 (hµ
α,να + hν
α,µα − hµν,αα − hαα,µν). (2.34)
The contracted Ricci tensor
R = gµνRµν ' ηµνRµν (2.35)
then becomes
R = 12 η
µν(hµα,να + hν
α,µα − hµν,αα − hαα,µν) (2.36)
which, after raising the indices and re-arranging the dummy indices,simplifies to
R = hαβ,αβ − hαα,ββ . (2.37)
§2.4.2 Dilatation (mass) relation
Making use of (2.37) and (2.27) into the dilatation relation (2.30), weobtain the longitudinal dilatation mass relation
hαα,ββ − hαβ,αβ = κT (2.38)
and, substituting for κ from (2.28) and T = ρc2 from (2.22),
∇2hαα − ∂α∂βhαβ =8πG
c2ρ (2.39)
where ρ is the rest-mass density. This equation is shown to lead toPoisson’s equation for a newtonian gravitational potential in the nextsection.
The second term of (2.39) would typically be set equal to zero usinga gauge condition analogous to the Lorenz condition [193, see p. 438].However, the second term is a divergence term, and it should not be setequal to zero in the general case where sources may be present.

36 Chapter 2 Spacetime Continuum Elastodynamics
§2.4.3 Static newtonian gravitational field
We consider the metric perturbation [193, see pp. 412–416]
h00 = −2Φ/c2
hii = 0, for i = 1, 2, 3(2.40)
where Φ is a static (i.e. time independent) newtonian gravitationalfield. Then the term
hαβ,αβ = h00,00 = 0 (2.41)
and (2.38) becomes∇2h0
0 = κT. (2.42)
Using h00 from (2.40) and κ from (2.28), (2.42) becomes
∇2Φ =4πG
c2T. (2.43)
Substituting for T = ρc2 from (2.22), we obtain
∇2Φ = 4πGρ (2.44)
where ρ is the mass density. This equation is Poisson’s equation for anewtonian gravitational potential.
§2.4.4 Distortion (wave) relation
Combining (2.34) and (2.37) with (2.26) and (2.27) into the distortionrelation of (2.29), we obtain the transverse distortion wave relation
12 (hµα,ν
α + hνα,µα − hµν,αα − hαα,µν)−
− 14 ηµν(hαβ,αβ − hαα,ββ) = κtµν
(2.45)
where tµν is obtained from (1.20) and (1.21). This equation can beshown to be equivalent to the equation derived by Misner et al [193, seetheir Eq.(18.5)] from which they derive their linearized field equationand transverse wave equation in the Transverse Traceless gauge [193, seepp. 946–950]. This shows that this equation of the linearized theory ofgravity corresponds to a transverse wave equation.
This result highlights the importance of carefully selecting the gaugetransformation used to simplify calculations. For example, the use ofthe Transverse Traceless gauge eliminates massive solutions which, as

§2.5 General Relativity and STCED relation 37
shown above, are longitudinal in nature, while yielding only non-massive(transverse) solutions for which the trace equals zero.
We thus find that the dilatation-distortion decomposition of ten-sor fields also applies to general relativity. In addition, the results ofSTCED are found to be applicable to general relativity. As mentionedpreviously, this is not surprising as the postulates of STCED derive fromgeneral relativity, and vice versa in that the geometry of spacetime usedin general relativity derives from the combination of the spacetime de-formations of STCED.
§2.5 Relation between General Relativity and STCED
The previous section §2.4 shows that the results of STCED should beapplicable to general relativity. This is a reasonable expectation, giventhat the postulates of STCED derive from general relativity. In thissection, we show the relation between the general relativistic spacetimegeometry and its generation from the combination of the spacetimedeformations of STCED.
This is derived from the STCED stress-strain relation of (2.6), viz.
2µ0εµν + λ0g
µνε = Tµν
and the Einstein field equations of general relativity of (2.8), viz.
Rµν − 12 g
µνR = −κ Tµν .
As noted in §2.2, the structure of the STCED stress-strain relation (2.6)is similar to that of the Einstein field equations of general relativity (2.8).
Eq. (2.8) is a field equation in terms of the curvature of the space-time continuum while (2.6) is a field equation in terms of the strainsof the spacetime continuum which are themselves expressed in terms ofdisplacements uµ from the equilibrium position xµ. Both field equationsare thus describing the same phenomenon of spacetime warping fromdifferent perspectives.
However, the Ricci curvature tensor Rµν is a function of the connec-tion coefficients Γ and their derivatives which are in turn functions ofthe derivative of the metric tensor gµν . On the other hand, the straintensor εµν is expressed as the difference between the deformed metricgµν and the original metric gµν
εµν = 12 (gµν − gµν) (2.46)
which is at most a function of the derivative of the metric tensor. Thecurvature description is understandably going to be more complicated

38 Chapter 2 Spacetime Continuum Elastodynamics
than the strain description as it needs to account for the combinationof the simpler deformations causing the geometry of the spacetime con-tinuum.
Eq. (2.8) is a complex relation that corresponds to a macroscopicdescription of the gravitational field equations in terms of the geometryof spacetime. Eq. (2.6) is a simpler relation which corresponds to amicroscopic description of the deformations of the spacetime continuumdue to energy-momentum. The geometry of spacetime used in (2.8)should thus be considered to be a linear composition (represented by asum) of STC deformations, starting with the total energy-momentumgenerating the geometry of general relativity, TµνGR, being a compositionof the energy-momentum of the individual deformations of STCED,TµνSTCED:
TµνGR =∑
TµνSTCED . (2.47)
Substituting into (2.47) from (2.6) and (2.8), we obtain
− 1
κ[Rµν − 1
2 gµνR
]=∑[
2µ0 εµν + λ0 g
µνε]. (2.48)
This explains the complexity of (2.8) relative to (2.6).Contraction of (2.48) yields the relation
1
κR =
∑2(µ0 + 2λ0) ε (2.49)
which, using (2.3) and (2.24), simplifies to
1
κR =
∑4 κ0 ε =
∑ρ c2 (2.50)
i.e. the curvature of the spacetime continuum arises from the com-position of the effect of individual deformations and is proportional tothe rest-mass energy density present in the spacetime continuum. Sub-stituting for R/κ from (2.50) into (2.48), and rearranging terms, weobtain
1
κRµν =
∑[(λ0 + µ0)gµνε− 2µ0 ε
µν]. (2.51)
Eq. (2.50) and (2.51) give the relation between the microscopic de-scription of the strains (i.e. deformations of the spacetime continuum)and the macroscopic description of the gravitational field in terms of thecurvature of the spacetime continuum resulting from the combination ofthe many microscopic displacements of the spacetime continuum fromequilibrium.

§2.6 The question of relativistic mass 39
§2.5.1 The cosmological constant
The observant reader will notice that the Einstein field equations of gen-eral relativity of (2.8) does not include the cosmological constant term+Λgµν where Λ is the cosmological constant. The cosmological constantterm was initially introduced by Einstein [76] to deal with the cosmolog-ical solutions of his field equations. As the STCED stress-strain relationof (2.6) provides a local small- to intermediate-scale description of thefundamental processes of the spacetime continuum, it is not meant to bea cosmological relation, which is the domain of the macroscopic, large-scale description of the spacetime continuum provided by the GeneralTheory of Relativity. Hence there is no purpose in using the cosmologi-cal constant in the comparison of the STCED stress-strain relation andthe Einstein field equations of general relativity of the previous section§2.5. There is no value in introducing the cosmological constant in theElastodynamics of the Spacetime Continuum.
It should be noted that the cosmological constant term +Λgµν canbe equivalently incorporated in the second term − 1
2 gµνR of the Einstein
field equations by writing the cosmological constant as
Λ = − 12 δR (2.52)
and incorporating it in the second term of the Einstein field equationsas − 1
2 gµνR′ where R′ = R + δR. Given the previous considerations
summarized in (2.50), we see that the introduction of the cosmologicalconstant term +Λgµν is equivalent to introducing additional rest-massenergy density in the spacetime continuum. The resurgent interest inthe cosmological constant is due to this characteristic, which is seen as apossible solution to the question of dark matter and dark energy whichis considered to be a major problem by modern cosmologists. We willcome back to this question in chapter 19 of this book.
§2.6 The question of relativistic mass
The concept of relativistic mass has been part of special relativisticphysics since it was first introduced by Einstein [74, 75]. Other termi-nology is also used for relativistic mass. For example, Aharoni [2] refersto it as the “relative mass”, while Dixon [65] refers to it as “appar-ent mass”. Relativistic mass is often considered to represent an actualincrease in the inertial mass of a body [212].
However, there have been objections raised against this concept[257]. In this section, we will show that the inertial mass of a body

40 Chapter 2 Spacetime Continuum Elastodynamics
is the rest-mass energy while the relativistic mass is in effect an effec-tive mass m∗
m∗ = γm0 , (2.53)
where
γ =1
(1− β2)1/2
, (2.54)
β = v/c and m0 is the rest-mass which, in STCED, corresponds tothe invariant longitudinal volume dilatation given by (2.24) which isequivalent to the inertial mass.
Clearly, the invariant longitudinal volume dilatation does not in-crease with velocity as it is an invariant. An effective mass is oftenintroduced in dynamic equations in various fields of physics. Here theeffective mass allows us to write the energy E as the sum of the rest-mass and the kinetic energy K of the body, which is typically writtenas
E = m∗c2 = m0c2 +K (2.55)
to giveK = (γ − 1)m0c
2 . (2.56)
Of course, the actual energy relation in special relativity is quadratic,given by
E2 = m20c
4 + p2c2 , (2.57)
where p is the momentum. Making use of the effective mass (2.53)allows us to obtain a linear expression from (2.57), starting from
m∗2c4 = γ2m20c
4 = m20c
4 + p2c2 , (2.58)
which becomespc =
√γ2 − 1m0c
2 (2.59)
orpc = βγm0c
2 =v
cγm0c
2 =v
cE . (2.60)
Thenp = m∗v . (2.61)
As [212, see p. 112] shows, the γ factor corresponds to the derivativeof time with respect to proper time, i.e.
dt
dτ=
1
(1− β2)1/2
= γ , (2.62)

§2.6 The question of relativistic mass 41
such that the velocity with respect to the proper time, u, is given by
u = γv . (2.63)
Hence using (2.63) in (2.61), (2.61) becomes the correct special rela-tivistic relation
p = m0u , (2.64)
which again shows that m∗ in (2.61) is an effective mass when dealingwith dynamic equations in the local time t instead of the invariantproper time τ . It is easy to see that differentiating (2.64) with respectto proper time results in a force law that obeys Newton’s law with therest-mass acting as the inertial mass, as is expected from STCED.
Hence we find that relativistic mass results from dealing with massin local time t instead of the invariant proper time τ and is an effectsimilar to length contraction and time dilation.

42

Chapter 3
Spacetime Wave Equations
§3.1 Kinematic relations
As we have seen previously in section §1.2, the strain εµν can be ex-pressed in terms of the displacement uµ through the kinematic rela-tion [237, see pp. 149–152]:
εµν = 12 (uµ;ν + uν;µ + uα;µuα
;ν) (3.1)
where the semicolon (;) denotes covariant differentiation. For smalldisplacements, this expression can be linearized to give the symmetrictensor
εµν = 12 (uµ;ν + uν;µ) = u(µ;ν) (3.2)
where the parentheses around the indices of u(µ;ν) denote a symmetriccombination of the indices. We use the small displacement approxima-tion in this analysis.
An antisymmetric tensor ωµν can also be defined from the displace-ment uµ. This tensor is called the rotation tensor and is defined as [237]:
ωµν = 12 (uµ;ν − uν;µ) = u[µ;ν] (3.3)
where the square brackets around the indices of u[µ;ν] denote an anti-symmetric combination of the indices.
Where needed, displacements in expressions derived from (3.2) willbe written as u‖ while displacements in expressions derived from (3.3)will be written as u⊥. Using different symbolic subscripts for thesedisplacements provides a reminder that symmetric displacements arealong the direction of motion (longitudinal), while antisymmetric dis-placements are perpendicular to the direction of motion (transverse).
In general, we have [237]
uµ;ν = εµν + ωµν (3.4)
where the tensor uµ;ν is a combination of symmetric and antisymmetrictensors. Lowering index ν and contracting, we get the volume dilatationof the spacetime continuum
uµ;µ = εµµ = u‖µ
;µ = ε (3.5)

44 Chapter 3 Spacetime Wave Equations
where the relationωµµ = u⊥
µ;µ = 0 (3.6)
has been used.
§3.2 Dynamic equations
In this section, we consider the dynamics of the spacetime continuum,more specifically its elastodynamic equations given that the spacetimecontinuum is modelled as a linear elastic continuum obeying Hooke’slaw. In general, a volume (or body) force Xν may be present in thespacetime continuum, representing the forces internal to the continuum.
§3.2.1 Equilibrium condition
Under equilibrium conditions, the dynamics of the spacetime continuumis described by the equation [104, see pp. 88–89],
Tµν ;µ = −Xν (3.7)
where Xν is the volume force. As Wald [271, see p. 286] points out, ingeneral relativity the local energy density of matter as measured by agiven observer is well-defined, and the relation
Tµν ;µ = 0 (3.8)
can be taken as expressing local conservation of the energy-momentumof matter. However, it does not in general lead to a global conservationlaw. The value Xν = 0 is thus taken to represent the macroscopic localcase, while (3.7) provides a more general relation.
At the microscopic level, energy is conserved within the limits of theHeisenberg Uncertainty Principle. The volume force may thus be verysmall, but not exactly zero. It again makes sense to retain the volumeforce in the equation, and use (3.7) in the general case, while (3.8) canbe used at the macroscopic local level, obtained by setting the volumeforce Xν equal to zero.
§3.2.2 Dynamic equation
In three-dimensional space, the dynamic equation is written as [104, seepp. 88–89]
T ij ,j = −Xi + ρ0ui (3.9)
where ρ0 corresponds to the spacetime continuum density, Xi is thevolume force, the comma (,) represents differentiation and u denotes the

§3.3 Displacement wave equation 45
derivative with respect to time. Substituting for εµν = 12 (uµ;ν + uν;µ)
in (2.6), using (2.7) and uµ;µ = εµµ = ε in this equation, we obtain
µ0−→∇2ui + (µ0 + λ0)ε;i = −Xi + ρ0u
i (3.10)
which, upon converting the time derivative to indicial notation and re-arranging, is written as
µ0−→∇2ui − ρ0c
2ui,00 + (µ0 + λ0)ε;i = −Xi . (3.11)
We use the arrow above the nabla symbol to indicate the three-dimensio-nal gradient whereas the four-dimensional gradient is written with noarrow. Using the relation [180]
c =
õ0
ρ0(3.12)
in the above, (3.11) becomes
µ0(−→∇2ui − ui,00) + (µ0 + λ0)ε;i = −Xi (3.13)
and, combining the space and time derivatives, we obtain
µ0∇2ui + (µ0 + λ0)ε;i = −Xi . (3.14)
This equation is the space portion of the STCED displacement waveequation (3.18)
µ0∇2uν + (µ0 + λ0)ε;ν = −Xν .
Hence the dynamics of the spacetime continuum is described by the dy-namic equation (3.7), which includes the accelerations from the appliedforces.
§3.3 Displacement wave equation
We derive the STCED displacement wave equation from the stress-strain relation (2.6) for the spacetime continuum. Substituting for Tµν
from (2.6), (3.7) becomes
2µ0εµν
;µ + λ0gµνε;µ = −Xν (3.15)
and, using (3.2),
µ0(uµ;νµ + uν;µ
µ) + λ0ε;ν = −Xν . (3.16)

46 Chapter 3 Spacetime Wave Equations
Interchanging the order of differentiation in the first term and using(3.5) to express ε in terms of u, this equation simplifies to
µ0uν;µ
µ + (µ0 + λ0)uµ;µν = −Xν (3.17)
which can also be written as
µ0∇2uν + (µ0 + λ0)ε;ν = −Xν . (3.18)
This is the displacement wave equation seen in the previous section§3.2.2.
In the case where there is no volume force (Xν = 0), we obtain themacroscopic displacement wave equation
∇2uν = − µ0 + λ0
µ0ε;ν . (3.19)
where ∇2 is the four-dimensional operator and again the semi-colon(;) represents covariant differentiation. This equation has stationarysolutions (∂tu
ν = 0) for −∞ < x, y, z <∞ [216, see p. 544]:
uν(x, y, z) =1
4π
µ0 + λ0
µ0
×+∞∫∫∫−∞
ε;ν(ξ, η, ζ) dξdηdζ√(x− ξ)2 + (y − η)2 + (z − ζ)2
.
(3.20)
The general time-dependent solutions for −∞ < x, y, z < ∞ are givenby [216, see p. 412]:
uν(x, y, z, t) =1
4π
µ0 + λ0
µ0
×∫∫∫r≤ct
1
rε;ν(ξ, η, ζ, t− r/c) dξdηdζ
+1
4πc
∂
∂t
∫∫r=ct
fν(ξ, η, ζ)
rdS
+1
4πc
∫∫r=ct
gν(ξ, η, ζ)
rdS
(3.21)

§3.3 Displacement wave equation 47
wherer =
√(ξ − x)2 + (η − y)2 + (ζ − z)2
fν(x, y, z) = uν |t=0
gν(x, y, z) = ∂tuν |t=0
and where the integration is performed over the surface of the sphere(r = ct) and the volume of the sphere (r ≤ ct) with center at (x, y, z).
The R.H.S. of (3.19) is a source term, proportional to a current-liketerm ε;ν which we call the dilatation current written as ξν (not the sameas coordinate ξ used in (3.20) and (3.21))
ξν = ε;ν = ∇ξ . (3.22)
Eq. (3.19) then becomes
∇2uν = − µ0 + λ0
µ0ξν (3.23)
and the general displacement wave equation (3.18) with a non-zero vol-ume force becomes
µ0∇2uν + (µ0 + λ0) ξν = −Xν . (3.24)
Eqs. (3.23) and (3.24) can be separated into longitudinal and trans-verse components. Separating uν into a longitudinal (irrotational) com-ponent uν‖ and a transverse (solenoidal) component uν⊥ using the Helm-
holtz theorem in four dimensions [283] according to
uν = uν‖ + uν⊥ , (3.25)
and similarly for the separation of the dilatation current ξν into a longi-tudinal (irrotational) component ξν‖ and a transverse (solenoidal) com-ponent ξν⊥
ξν = ξν‖ + ξν⊥ , (3.26)
and the volume force Xν into a longitudinal (irrotational) componentXν‖ and a transverse (solenoidal) component Xν
⊥
Xν = Xν‖ +Xν
⊥ , (3.27)
the displacement wave equation (3.24) with a volume force can be sep-arated into a longitudinal displacement equation
µ0∇2uν‖ = −(µ0 + λ0) ξν‖ −Xν‖ (3.28)

48 Chapter 3 Spacetime Wave Equations
and a transverse displacement equation
∇2uν⊥ = − µ0 + λ0
µ0ξν⊥ −
1
µ0Xν⊥ (3.29)
which, in the absence of a current (ξν⊥ = 0), becomes
∇2uν⊥ = − 1
µ0Xν⊥ . (3.30)
These equations correspond to a wave and a particle displacement equa-tion respectively, and hence displacement equations (3.23) and (3.24)include wave-particle duality in their formulation.
§3.4 Continuity equation
We derive a continuity equation for STC deformations. Taking thedivergence of (3.4), we obtain
uµ;νµ = εµν ;µ + ωµν ;µ. (3.31)
Interchanging the order of partial differentiation in the first term, andusing (3.5) to express u in terms of ε, this equation simplifies to
εµν ;µ + ωµν ;µ = ε;ν = ξν . (3.32)
Hence the divergence of the strain and rotation tensors equals the gradi-ent of the massive volume dilatation, the dilatation current, which actsas a source term. This is the continuity equation for deformations ofthe spacetime continuum.
§3.5 Field wave equations
We now obtain a series of specialized field wave equations from thedisplacement wave equation.
§3.5.1 Dilatational (longitudinal) wave equation
Taking the divergence of (3.17) and interchanging the order of partialdifferentiation in the first term, we obtain
(2µ0 + λ0)uµ;µνν = −Xν
;ν . (3.33)
Using (3.5) to express u in terms of ε, this equation simplifies to
(2µ0 + λ0)ε;νν = −Xν
;ν (3.34)

§3.5 Field wave equations 49
or
(2µ0 + λ0)∇2ε = −Xν;ν . (3.35)
In the case where there is no volume force (Xν = 0), we obtain themacroscopic longitudinal wave equation
(2µ0 + λ0)∇2ε = 0. (3.36)
The volume dilatation ε satisfies a wave equation known as the dilata-tional wave equation [237, see p. 260]. The solutions of the homogeneousequation are dilatational waves which are longitudinal waves, propagat-ing along the direction of motion. Dilatations thus propagate in thespacetime continuum as longitudinal waves.
§3.5.2 Rotational (transverse) wave equation
Differentiating (3.17) with respect to xα, we obtain
µ0uν;µ
µα + (µ0 + λ0)uµ;µ
να = −Xν;α. (3.37)
Interchanging the dummy indices ν and α, and subtracting the resultingequation from (3.37), we obtain the relation
µ0(uν;µµα − uα;µ
µν) = −(Xν;α −Xα;ν). (3.38)
Interchanging the order of partial differentiations and using the defini-tion of the rotation tensor ωνα of (3.3), the following wave equation isobtained:
µ0∇2ωµν = −X [µ;ν] (3.39)
where X [µ;ν] is the antisymmetric component of the gradient of thevolume force defined as
X [µ;ν] = 12 (Xµ;ν −Xν;µ) . (3.40)
In the case where there is no volume force (Xν = 0), we obtain themacroscopic transverse wave equation
µ0∇2ωµν = 0. (3.41)
The rotation tensor ωµν satisfies a wave equation known as the rota-tional wave equation [237, see p. 260]. The solutions of the homogeneousequation are rotational waves which are transverse waves, propagatingperpendicular to the direction of motion. Massless waves thus propagatein the spacetime continuum as transverse waves.

50 Chapter 3 Spacetime Wave Equations
§3.5.3 Strain (symmetric) wave equation
A corresponding symmetric wave equation can also be derived for thestrain εµν . Starting from (3.37), interchanging the dummy indices νand α, adding the resulting equation to (3.37), and interchanging theorder of partial differentiation, the following wave equation is obtained:
µ0∇2εµν + (µ0 + λ0)ε;µν = −X(µ;ν) (3.42)
where X(µ;ν) is the symmetric component of the gradient of the volumeforce defined as
X(µ;ν) = 12 (Xµ;ν +Xν;µ) . (3.43)
In the case where there is no volume force (Xν = 0), we obtain themacroscopic symmetric wave equation
∇2εµν = − µ0 + λ0
µ0ε;µν . (3.44)
This strain wave equation is similar to the displacement wave equation(3.19).
§3.6 Spin analysis of the wave equations
We thus find that deformations propagate in the spacetime continuumby longitudinal and transverse wave displacements. As mentioned pre-viously, this is in keeping with wave-particle duality, with the transversemode corresponding to the wave aspects and the longitudinal mode cor-responding to the particle aspects.
We consider the spin of the scalar, vector and tensor fields for thewave equations derived in this chapter [102, p, 31]. We note that as seenin chapter 1, (1.16) to (1.18), the strain tensor εµν can be separated intothe traceless, and hence massless, part of εµν of spin 2 given by [149,p. 753]
εµν(2) = eµν = εµν − 14 δ
µνε (3.45)
and the trace, and hence massive, part of εµν of spin 0 given by
εµν(0) = esδµν = 1
4 δµνε . (3.46)
The rotation tensor ωµν of (3.3) can be written as a rotation vector,also known as the spin vector ωµ given by
ωµ = 12 ε
µαβ ωαβ . (3.47)

§3.6 Spin analysis of the wave equations 51
The trace of the antisymmetric field ωµν is zero, and hence massless.The field ωµν is of spin 1, and since it is massless, it does not have aspin 0 component. This field will be studied in more details in chapter4 and will be seen to correspond to electromagnetism.
From (3.4), viz.
uµ;ν = εµν + ωµν ,
we can write uµ;ν as a combination of spin 0, 1 and 2 fields. From (3.45)and (3.46),
εµν = eµν + 14 δ
µνε
= εµν(2) + εµν(0)
(3.48)
and from (3.47),
ωµν(1) = 12 ε
µνα ωα . (3.49)
Then
uµ;ν = εµν(0) + εµν(2) + ωµν(1) , (3.50)
i.e. a combination of spin 0 (mass as deformation particle aspect), spin 1(electromagnetism) and spin 2 (deformation wave aspect). Substitutingfrom (3.45), (3.46) and (3.49), (3.50) becomes
uµ;ν = 14 δ
µνε+ eµν + 12 ε
µνα ωα . (3.51)
Note that some authors also refer to uµ;ν as the distortion tensor βµν [59](see the footnote on page 28 on the terminology used in this book). Inthis work, we will use βµν when referring specifically to the distortiontensor.
The wave equations derived in this chapter can be further charac-terized as follows.
§3.6.1 Scalar field equation
The dilatational wave equation (3.35) is a nonhomogeneous scalar fieldequation. The quanta of the scalar field are spin 0 (spinless) parti-cles [102,113]. The scalar field ε corresponds to the massive particle asper (2.24). Massive particles are longitudinal wave solutions of the di-latational (longitudinal) wave equation, propagating along the directionof motion.

52 Chapter 3 Spacetime Wave Equations
§3.6.2 Vector field equation
The displacement wave equation (3.18) is a nonhomogeneous vectorfield equation. It is similar to the Proca equation for spin-1 particles(massive vector boson). As shown in (3.28) and (3.29), this equationcorresponds to both a wave and a particle displacement equation re-spectively, and hence includes wave-particle duality in its formulation.The Proca equation is considered in more details in section §4.8.2 inchapter 4.
§3.6.3 Massless vector field equation
The rotational wave equation (3.39) is a nonhomogeneous antisymmet-ric tensor field equation equivalent to a massless vector wave equation.The quanta of the vector field are equivalent to massless spin 1 trans-verse waves [113]. The massless transverse waves will be seen to beelectromagnetic waves in chapter 4. The solutions of the rotational(transverse) wave equation are transverse waves, propagating perpen-dicular to the direction of motion.
§3.6.4 Symmetric tensor field equation
The strain wave equation (3.42) is a nonhomogeneous symmetric tensorfield equation. The quanta of this tensor field are equivalent to masslesstransverse waves of spin 2 and, as seen above, massive particles of spin0 [113] (see section §3.6.1 above). This explains wave-particle duality,with the spin 2 transverse mode corresponding to the wave aspectsand the spin 0 longitudinal mode corresponding to the particle aspects.The massless transverse waves of spin 2 are the gravitational waves ofGeneral Relativity with the corresponding graviton quanta.

Chapter 4
Electromagnetism in STCED
§4.1 Electromagnetic field strength
Since Einstein first published his General Theory of Relativity in 1915,the problem of the unification of gravitation and electromagnetism hasbeen and remains the subject of continuing investigation (see for exam-ple [24, 44, 48, 127, 220, 240, 241, 272, 284] for recent attempts). Einsteinhimself spent a good part of his remaining years of research on theinvestigation of Unified Field Theory.
In this chapter, we derive electromagnetism from the Elastodynam-ics of the Spacetime Continuum. STCED is based on the application ofa continuum mechanical approach to the spacetime continuum. Electro-magnetism is found to come out naturally from the theory in a straight-forward manner. While the search has been for a geometric unifica-tion, instead, the solution is found to lie in the physical properties ofthe spacetime continuum, in its displacements from equilibrium. Thistheory thus provides a unified description of the spacetime deforma-tion processes underlying general relativistic gravitation and electro-magnetism, in terms of spacetime continuum displacements resultingfrom the strains generated by the energy-momentum stress tensor.
In the Elastodynamics of the Spacetime Continuum, the antisym-metric rotation tensor ωµν is given by (3.3), viz.
ωµν = 12 (uµ;ν − uν;µ) (4.1)
where uµ is the displacement of an infinitesimal element of the spacetimecontinuum from its unstrained position xµ. This tensor has the samestructure as the electromagnetic field-strength tensor Fµν defined as[136, see p. 550]:
Fµν = ∂µAν − ∂νAµ (4.2)
where Aµ is the electromagnetic potential four-vector (φ/c,A), φ is thescalar potential and A the vector potential.
Identifying the rotation tensor ωµν with the electromagnetic field-strength tensor according to
Fµν = ϕ0ωµν (4.3)

54 Chapter 4 Electromagnetism in STCED
leads to the relationAµ = − 1
2 ϕ0uµ⊥ (4.4)
where the symbolic subscript ⊥ of the displacement uµ indicates thatthe relation holds for a transverse displacement (perpendicular to thedirection of motion). The constant of proportionality ϕ0 is referred toas the “STC electromagnetic shearing potential constant”, and it hasunits of [V · s ·m−2] or equivalently [T].
Due to the difference in the definition of ωµν and Fµν with re-spect to their indices, a negative sign is introduced, and is attributed to(4.4). This relation provides a physical explanation of the electromag-netic potential: it arises from transverse (shearing) displacements of thespacetime continuum, in contrast to mass which arises from longitudi-nal (dilatational) displacements of the spacetime continuum. Shearedspacetime is manifested as electromagnetic potentials and fields.
§4.2 Maxwell’s equations
Taking the divergence of the rotation tensor of (4.1), gives
ωµν ;µ = 12 (uµ;ν
µ − uν;µµ). (4.5)
Recalling (3.17), viz.
µ0uν;µ
µ + (µ0 + λ0)uµ;µν = −Xν
where Xν is the volume force and λ0 and µ0 are the Lame elastic con-stants of the spacetime continuum, substituting for uν;µ
µ from (3.17)into (4.5), interchanging the order of partial differentiation in uµ;ν
µ in(4.5), and using the relation uµ;µ = εµµ = ε from (3.5), we obtain
ωµν ;µ =2µ0 + λ0
2µ0ε;ν +
1
2µ0Xν . (4.6)
As seen previously in section §3.2, in the macroscopic local case, thevolume force Xν is set equal to zero to obtain the macroscopic relation
ωµν ;µ =2µ0 + λ0
2µ0ε;ν (4.7)
Using (4.3) in (4.7), we obtain
Fµν ;µ = ϕ02µ0 + λ0
2µ0ε;ν . (4.8)

§4.3 Current density four-vector 55
§4.3 Current density four-vector
Comparing (4.8) with the covariant form of Maxwell’s equations [45, seepp. 42–43]
Fµν ;µ = µ0jν (4.9)
where jν is the current density four-vector (c%, j), % is the charge den-sity scalar, and j is the current density vector, we obtain the followingrelation for the current density four-vector jν
jν =ϕ0
µ0
2µ0 + λ0
2µ0ε;ν (4.10)
or, in terms of the dilatation current ξν ,
jν =ϕ0
µ0
2µ0 + λ0
2µ0ξν . (4.11)
(Note the difference between µ0 and µ0 as discussed under “A note onspacetime continuum constants” in the Preface.) This relation providesa physical explanation of the current density four-vector: it arises fromthe 4-gradient of the volume dilatation of the spacetime continuum (thedilatation current). A corollary of this relation is that massless (trans-verse) waves cannot carry an electric charge.
Substituting for jν from (4.10) in the relation [10, see p. 94]
jνjν = %2c2, (4.12)
we obtain the expression for the charge density
% =1
2
ϕ0
µ0c
2µ0 + λ0
2µ0
√ε;νε;ν (4.13)
or, using the relation c = 1/√ε0µ0,
% =1
2ϕ0ε0c
2µ0 + λ0
2µ0
√ε;νε;ν . (4.14)
Up to now, our identification of the rotation tensor ωµν of the Elasto-dynamics of the Spacetime Continuum with the electromagnetic field-strength tensor Fµν has generated consistent results, with no contra-dictions.

56 Chapter 4 Electromagnetism in STCED
§4.4 Lorenz condition
The Lorenz condition can be derived directly from the theory. Takingthe divergence of (4.4), we obtain
Aµ;µ = − 12 ϕ0u⊥
µ;µ. (4.15)
From (3.6), (4.15) simplifies to
Aµ;µ = 0. (4.16)
The Lorenz condition is thus obtained directly from the theory. Thereason for the value of zero is that transverse displacements are masslessbecause such displacements arise from a change of shape (distortion) ofthe spacetime continuum, not a change of volume (dilatation).
§4.5 Four-vector potential
Substituting (4.4) into (4.5) and rearranging terms, we obtain the equa-tion
∇2Aν −Aµ;νµ = ϕ0 ω
µν;µ (4.17)
and, using (4.3) and (4.9), this equation becomes
∇2Aν −Aµ;νµ = µ0 j
ν . (4.18)
which is similar to the Proca equation to be considered in more detailsin section §4.8.2.
Interchanging the order of partial differentiation in the term Aµ;νµ
and using the Lorenz condition of (4.16), we obtain the well-known waveequation for the four-vector potential [45, see pp. 42–43]
∇2Aν = µ0 jν . (4.19)
The results we obtain are thus consistent with the macroscopic theoryof electromagnetism, with no contradictions.
§4.6 Electromagnetism and the STC volume force
We now investigate the impact of the volume force Xν on the equationsof electromagnetism. Recalling (4.6), Maxwell’s equation in terms ofthe rotation tensor is given by
ωµν ;µ =2µ0 + λ0
2µ0ε;ν +
1
2µ0Xν . (4.20)

§4.6 Electromagnetism and the STC volume force 57
Substituting for ωµν from (4.3), this equation becomes
Fµν ;µ = ϕ02µ0 + λ0
2µ0ε;ν +
ϕ0
2µ0Xν . (4.21)
The additional Xν term can be allocated in one of two ways:
1. either jν remains unchanged as given by (4.10) and the expressionfor Fµν ;µ has an additional term as developed in the first sectionbelow;
2. or Fµν ;µ remains unchanged as given by (4.9) and the expressionfor jν has an additional term as developed in the second sectionbelow.
Option 2 is shown in the following derivation to be the logically consis-tent approach.
§4.6.1 jν unchanged (contradiction)
Using (4.10) into (4.21), Maxwell’s equation becomes (jν unchanged)
Fµν ;µ = µ0 jν +
ϕ0
2µ0Xν . (4.22)
Using (4.20) into (4.17) and making use of the Lorenz condition, thewave equation for the four-vector potential becomes
∇2Aν − ϕ0
2µ0Xν = µ0 j
ν . (4.23)
In this case, the equations for Fµν ;µ and Aν both contain an additionalterm proportional to Xν .
We show that this option is not logically consistent as follows. Using(4.10) into the continuity condition for the current density [45]
∂νjν = 0 (4.24)
yields the expression∇2ε = 0. (4.25)
This equation is valid in the macroscopic case where Xν = 0, but dis-agrees with the general case (non-zero Xν) given by (3.35), viz.
(2µ0 + λ0)∇2ε = −Xν;ν .
The analysis in this section leads to a contradiction and consequentlyis not valid.

58 Chapter 4 Electromagnetism in STCED
§4.6.2 Fµν;µ unchanged (logically consistent)
Proper treatment of the general case requires that the current densityfour-vector be proportional to the RHS of (4.21) as follows (Fµν ;µ un-changed):
µ0 jν = ϕ0
2µ0 + λ0
2µ0ε;ν +
ϕ0
2µ0Xν . (4.26)
This yields the following general form of the current density four-vector:
jν =1
2
ϕ0
µ0 µ0
[(2µ0 + λ0) ε;ν +Xν
]. (4.27)
Using this expression in the continuity condition for the current densitygiven by (4.24) yields (3.35) as required.
Using (4.27) into (4.21) yields the same covariant form of the Max-well equations as in the macroscopic case:
Fµν ;µ = µ0 jν (4.28)
and the same four-vector potential equation
∇2Aν = µ0 jν (4.29)
in the Lorenz gauge.
§4.7 Homogeneous Maxwell equation
The validity of this analysis can be further demonstrated from the ho-mogeneous Maxwell equation [45]
∂αF βγ + ∂βF γα + ∂γFαβ = 0. (4.30)
Taking the divergence of this equation over α,
∂α∂αF βγ + ∂α∂
βF γα + ∂α∂γFαβ = 0. (4.31)
Interchanging the order of differentiation in the last two terms and mak-ing use of (4.28) and the antisymmetry of Fµν , we obtain
∇2F βγ + µ0(jβ;γ − jγ;β) = 0. (4.32)
Substituting for jν from (4.27),
∇2F βγ = − ϕ0
2µ0
[(2µ0 + λ0)(ε;βγ − ε;γβ) + (Xβ;γ −Xγ;β)
]. (4.33)

§4.8 Electromagnetic implications 59
Equation (3.42), viz.
µ0∇2εµν + (µ0 + λ0)ε;µν = −X(µ;ν)
shows that ε;µν is a symmetric tensor. Consequently the difference term(ε;βγ − ε;γβ) disappears and (4.33) becomes
∇2F βγ = − ϕ0
2µ0(Xβ;γ −Xγ;β). (4.34)
Expressing Fµν in terms of ωµν using (4.3), the resulting equation isidentical to (3.39), viz.
µ0∇2ωµν = −X [µ;ν]
confirming the validity of this analysis of electromagnetism includingthe volume force.
Equations (4.27) to (4.29) are the self-consistent electromagneticequations derived from the Elastodynamics of the Spacetime Contin-uum with the volume force. In conclusion, Maxwell’s equations remainunchanged. The current density four-vector is the only quantity affectedby the volume force, with the addition of a second term proportional tothe volume force.
It is interesting to note that the current density obtained from thequantum mechanical Klein-Gordon equation with an electromagneticfield also consists of the sum of two terms [113, see p. 35]. We willreturn to this peculiarity in section §7.1.
§4.8 Electromagnetic implications
In this section, we consider implications of the STCED model withrespect to electromagnetism.
§4.8.1 Electromagnetic mass
From this model, we see that the concept of electromagnetic mass thatwas pursued in the nineteenth century [137, see chapter 11] is not validas electromagnetism is transverse and massless, and has no massivelongitudinal component.
§4.8.2 Proca-like equation
As discussed previously in section §3.6.2, the displacement wave equa-tion (3.18) is similar to a Proca-like vector field equation. In the macro-scopic case where the volume force Xν is equal to zero, one obtains theclassical four-vector potential wave equation (4.19).

60 Chapter 4 Electromagnetism in STCED
However, in the case of a non-zero volume force as is expected at thequantum level, an additional term is present in (4.18). We show this bysubstituting the general form of the current density four-vector (4.26)into (4.18):
∇2Aν −Aµ;νµ = ϕ0
2µ0 + λ0
2µ0ε;ν +
ϕ0
2µ0Xν . (4.35)
The first term on the R.H.S. is written as the classical current densityfour-vector
µ0 jνclassical = ϕ0
2µ0 + λ0
2µ0ε;ν . (4.36)
Using (4.36) into (4.35) and rearranging, we obtain
∇2Aν −Aµ;νµ −
ϕ0
2µ0Xν = µ0 j
νclassical (4.37)
which includes an additional term on the L.H.S. as found in the Procaequation.
In Chapter 7, we will derive a quantum mechanical volume forcewhich will be seen to be of the form
Xν ∝ −Aν . (4.38)
Substituting for (4.38) into (4.37), the wave equation for the four-vectorpotential becomes
∇2Aν −Aµ;νµ +KAν = µ0 j
νclassical (4.39)
where K is a constant. The second term on the L.H.S. of the equationcan be set to zero using the Lorenz condition (4.16). The resulting equa-tion is similar to the well-known Proca equation [136] and is investigatedfurther in section §7.3.5.

Chapter 5
Energy in the Spacetime Continuum
§5.1 Strain energy density of the spacetime continuum
Energy in the spacetime continuum is present as strain energy density.This strain energy density is a scalar given by [104, see p. 51]
E = 12 T
αβεαβ (5.1)
where εαβ is the strain tensor and Tαβ is the energy-momentum stresstensor. Introducing the strain and stress deviators from (1.16) and(1.19), this equation becomes
E = 12
(tαβ + tsg
αβ)
(eαβ + esgαβ) . (5.2)
Multiplying and using relations eαα = 0 and tαα = 0 from the definitionof the strain and stress deviators, we obtain
E = 12
(4tses + tαβeαβ
). (5.3)
Using (2.9) to express the stresses in terms of the strains, this expressionbecomes
E = 12 κ0 ε
2 + µ0 eαβeαβ (5.4)
where the Lame elastic constant of the spacetime continuum µ0 is theshear modulus (the resistance of the continuum to distortions) and κ0
is the bulk modulus (the resistance of the continuum to dilatations).Alternatively, again using (2.9) to express the strains in terms of thestresses, this expression can be written as
E =1
2κ0t2s +
1
4µ0tαβtαβ . (5.5)
§5.2 Physical interpretation of the strain energy density
We observe in (5.4) and (5.5) that the strain energy density is separatedinto two terms: the first one expresses the dilatation energy density (the“mass” longitudinal term) while the second one expresses the distortionenergy density (the “massless” transverse term):
E = E‖ + E⊥ (5.6)

62 Chapter 5 Energy in the Spacetime Continuum
where
E‖ =1
2κ0ε
2 ≡ 1
2κ0t2 (5.7)
and
E⊥ = µ0eαβeαβ ≡
1
4µ0tαβtαβ . (5.8)
Using (2.24) into (5.7), we obtain
E‖ =1
32 κ0
[ρc2]2. (5.9)
The rest-mass energy density divided by the bulk modulus κ0, and thetransverse energy density divided by the shear modulus µ0, have dimen-sions of energy density as expected.
Multiplying (5.5) by 32 κ0 and using (5.9), we obtain
32 κ0 E = ρ2c4 + 8κ0
µ0tαβtαβ . (5.10)
Noting that tαβtαβ is quadratic in structure, we see that this equationis similar to the energy relation of Special Relativity [161, see p. 51] forenergy density
E2 = ρ2c4 + p 2c2 (5.11)
where E is the total energy density and p the momentum density.The quadratic structure of the energy relation of Special Relativity
is thus found to be present in the Elastodynamics of the SpacetimeContinuum. Equations (5.10) and (5.11) also imply that the kineticenergy pc is carried by the distortion part of the deformation, while thedilatation part carries only the rest-mass energy.
This observation is in agreement with photons which are massless(E‖ = 0), as will be shown in the next section §5.3, but still carrykinetic energy in the transverse electromagnetic wave distortions (E⊥ =tαβtαβ/4µ0).
As we will see in forthcoming chapters, the dilatation energy densityE‖ is usually fairly straightforward to calculate as it is proportional tothe square of the spacetime continuum volume dilatation ε, which isitself equal to the trace of the strain tensor
ε = Trace(εµν) . (5.12)
However, the calculation of the distortion energy density E⊥ is usuallya time-consuming exercise that results in complicated expressions.

§5.3 Electromagnetic strain energy density 63
§5.3 Electromagnetic strain energy density
The strain energy density of the electromagnetic energy-momentumstress tensor is now calculated. Starting from the symmetric electro-magnetic stress tensor [45, see pp. 64–66]
Θµν =1
µ0
(FµαF
αν +1
4gµνFαβFαβ
)≡ σµν , (5.13)
with gµν = ηµν of signature (+ – – –), and the field-strength tensorcomponents [45, see p. 43]
Fµν =
0 −Ex/c −Ey/c −Ez/c
Ex/c 0 Bz −ByEy/c −Bz 0 Bx
Ez/c By −Bx 0
(5.14)
and
Fµν =
0 Ex/c Ey/c Ez/c
−Ex/c 0 Bz −By−Ey/c −Bz 0 Bx
−Ez/c By −Bx 0
, (5.15)
we obtain [45, see p. 66] [193, see p. 141],
σ00 = 12
(ε0E
2 + 1µ0B2)
= 12 ε0
(E2 + c2B2
)σ0j = σj0 = 1
cµ0(E ×B)
j= ε0c (E ×B)
j= 1
c Sj
σjk = −(ε0E
jEk + 1µ0BjBk
)+ 1
2 δjk(ε0E
2 + 1µ0B2)
= −ε0[(EjEk + c2BjBk
)− 1
2 δjk(E2 + c2B2
)](5.16)
where Sj is the Poynting vector, and where we use the notation σµν ≡Θµν as a generalization of the σij Maxwell stress tensor notation. Hencethe electromagnetic stress tensor is given by [45, see p. 66]:
σµν =
12 ε0
(E2 + c2B2
)Sx/c Sy/c Sz/c
Sx/c −σxx −σxy −σxzSy/c −σyx −σyy −σyzSz/c −σzx −σzy −σzz
, (5.17)

64 Chapter 5 Energy in the Spacetime Continuum
where σij is the Maxwell stress tensor. Using the relation σαβ =ηαµηβνσ
µν to lower the indices of σµν , we obtain
σµν =
12 ε0
(E2 + c2B2
)−Sx/c −Sy/c −Sz/c
−Sx/c −σxx −σxy −σxz−Sy/c −σyx −σyy −σyz−Sz/c −σzx −σzy −σzz
. (5.18)
§5.3.1 Longitudinal (mass) term
The longitudinal mass term is calculated from (5.7) and (1.21):
E‖ =1
2κ0t2s =
1
32κ0(σαα)2. (5.19)
The term σαα is calculated from:
σαα = ηαβσαβ
= ηα0σα0 + ηα1σ
α1 + ηα2σα2 + ηα3σ
α3
= η00σ00 + η11σ
11 + η22σ22 + η33σ
33.
(5.20)
Substituting from (5.17) and the metric ηµν of signature (+ – – –), weobtain:
σαα =1
2ε0(E2 + c2B2
)+ σxx + σyy + σzz. (5.21)
Substituting from (5.16), this expands to:
σαα = 12 ε0
(E2 + c2B2
)+ ε0
(Ex
2 + c2Bx2)
+
+ ε0(Ey
2 + c2By2)
+ ε0(Ez
2 + c2Bz2)−
− 32 ε0
(E2 + c2B2
) (5.22)
and further,
σαα = 12 ε0
(E2 + c2B2
)+ ε0
(E2 + c2B2
)−
− 32 ε0
(E2 + c2B2
).
(5.23)
Henceσαα = 0 (5.24)

§5.3 Electromagnetic strain energy density 65
and, substituting into (5.19),
E‖ = 0 (5.25)
as expected [45, see pp. 64–66]. This derivation thus shows that the rest-mass energy density of the photon is zero, i.e. the photon is massless.
§5.3.2 Transverse (massless) term
The transverse term is calculated from (5.8), viz.
E⊥ =1
4µ0tαβtαβ . (5.26)
Given that ts = 14 σ
αα = 0, then tαβ = σαβ and the terms σαβσαβ are
calculated from the components of the electromagnetic stress tensorsof (5.17) and (5.18). Substituting for the diagonal elements and mak-ing use of the symmetry of the Poynting component terms and of theMaxwell stress tensor terms from (5.17) and (5.18), this expands to:
σαβσαβ = 14 ε
20
(E2 + c2B2
)2+
+ ε20[(ExEx + c2BxBx
)− 1
2
(E2 + c2B2
)]2+
+ ε20[(EyEy + c2ByBy
)− 1
2
(E2 + c2B2
)]2+
+ ε20[(EzEz + c2BzBz
)− 1
2
(E2 + c2B2
)]2−− 2
(Sx/c
)2 − 2(Sy/c
)2 − 2(Sz/c
)2+
+ 2 (σxy)2 + 2 (σyz)2 + 2 (σzx)2.
(5.27)
The EB terms expand to:
EB terms = ε20
[14
(E2 + c2B2
)2+
+(Ex
2 + c2Bx2)2 − (Ex2 + c2Bx
2) (E2 + c2B2
)+
+(Ey
2 + c2By2)2 − (Ey2 + c2By
2) (E2 + c2B2
)+
+(Ez
2 + c2Bz2)2 − (Ez2 + c2Bz
2) (E2 + c2B2
)+
+ 34
(E2 + c2B2
)2 ].
(5.28)

66 Chapter 5 Energy in the Spacetime Continuum
Simplifying,
EB terms = ε20
[ (E2 + c2B2
)2 − (Ex2 + c2Bx2+
+Ey2 + c2By
2 + Ez2 + c2Bz
2) (E2 + c2B2
)+
+(Ex
2 + c2Bx2)2
+(Ey
2 + c2By2)2
+
+(Ez
2 + c2Bz2)2 ]
(5.29)
which gives
EB terms = ε20
[ (E2 + c2B2
)2 − (E2 + c2B2)2
+
+(Ex
2 + c2Bx2)2
+(Ey
2 + c2By2)2
+
+(Ez
2 + c2Bz2)2 ]
(5.30)
and finally
EB terms = ε20
[ (Ex
4 + Ey4 + Ez
4)
+
+ c4(Bx
4 +By4 +Bz
4)
+
+ 2c2(Ex
2Bx2 + Ey
2By2 + Ez
2Bz2) ].
(5.31)
Including the EB terms in (5.27), substituting from (5.16), expandingthe Poynting vector and rearranging, we obtain
σαβσαβ = ε20
[ (Ex
4 + Ey4 + Ez
4)
+ c4(Bx
4 +By4 +Bz
4)+
+ 2c2(Ex
2Bx2 + Ey
2By2 + Ez
2Bz2) ]−
− 2ε20c2[
(EyBz − EzBy)2
+ (−ExBz + EzBx)2
+
+ (ExBy − EyBx)2]
+ 2ε20
[ (ExEy + c2BxBy
)2+
+(EyEz + c2ByBz
)2+(EzEx + c2BzBx
)2 ].
(5.32)

§5.3 Electromagnetic strain energy density 67
Expanding the quadratic expressions,
σαβσαβ = ε20
[ (Ex
4 + Ey4 + Ez
4)
+
+ c4(Bx
4 +By4 +Bz
4)+
+ 2c2(Ex
2Bx2 + Ey
2By2 + Ez
2Bz2) ]−
− 2ε20c2[Ex
2By2 + Ey
2Bz2 + Ez
2Bx2+
+Bx2Ey
2 +By2Ez
2 +Bz2Ex
2−
− 2(ExEyBxBy + EyEzByBz + EzExBzBx
)]+
+ 2ε20
[(Ex
2Ey2 + Ey
2Ez2 + Ez
2Ex2)+
+ 2c2(ExEyBxBy + EyEzByBz + EzExBzBx
)+
+ c4(Bx
2By2 +By
2Bz2 +Bz
2Bx2) ].
(5.33)
Grouping the terms in powers of c together,
1
ε20σαβσαβ =
[ (Ex
4 + Ey4 + Ez
4)
+
+ 2(Ex
2Ey2 + Ey
2Ez2 + Ez
2Ex2)]
+
+ 2c2[(Ex
2Bx2 + Ey
2By2 + Ez
2Bz2)−
−(Ex
2By2 + Ey
2Bz2 + Ez
2Bx2+
+Bx2Ey
2 +By2Ez
2 +Bz2Ex
2)+
+ 4(ExEyBxBy + EyEzByBz+
+EzExBzBx)]
+ c4[ (Bx
4 +By4 +Bz
4)
+
+ 2(Bx
2By2 +By
2Bz2 +Bz
2Bx2) ].
(5.34)

68 Chapter 5 Energy in the Spacetime Continuum
Simplifying,
1
ε20σαβσαβ =
(Ex
2 + Ey2 + Ez
2)2
+
+ 2c2(Ex
2 + Ey2 + Ez
2) (Bx
2 +By2 +Bz
2)−
− 2c2[2(Ex
2By2 + Ey
2Bz2 + Ez
2Bx2+
+Bx2Ey
2 +By2Ez
2 +Bz2Ex
2)−
− 4(ExEyBxBy + EyEzByBz + EzExBzBx
)]+
+ c4(Bx
2 +By2 +Bz
2)2
(5.35)
which is further simplified to
1
ε20σαβσαβ =
(E4 + 2c2E2B2 + c4B4
)−
− 4c2[
(EyBz −ByEz)2+ (EzBx −BzEx)
2+
+ (ExBy −BxEy)2].
(5.36)
Making use of the definition of the Poynting vector from (5.16), weobtain
σαβσαβ = ε20(E2 + c2B2
)2−− 4ε20c
2[(E ×B)x
2 + (E ×B)y2 + (E ×B)z
2] (5.37)
and finally
σαβσαβ = ε20(E2 + c2B2
)2 − 4
c2(Sx
2 + Sy2 + Sz
2). (5.38)
Substituting in (5.26), the transverse term becomes
E⊥ =1
4µ0
[ε20(E2 + c2B2
)2 − 4
c2S2
](5.39)
or
E⊥ =1
µ0
[Uem
2 − 1
c2S2
](5.40)
where Uem = 12 ε0(E2+c2B2) is the electromagnetic field energy density.

§5.4 EM field strain energy density and the photon 69
§5.4 Electromagnetic field strain energy density and thephoton
S is the electromagnetic energy flux along the direction of propaga-tion [45, see p. 62]. As noted by Feynman [100, see pp. 27-1–2], localconservation of the electromagnetic field energy can be written as
−∂Uem∂t
= ∇ · S, (5.41)
where the term E · j representing the work done on the matter insidethe volume is 0 in the absence of charges (due to the absence of mass).By analogy with the current density four-vector jν = (c%, j), where % isthe charge density, and j is the current density vector, which obeys asimilar conservation relation, we define the Poynting four-vector
Sν = (cUem,S) , (5.42)
where Uem is the electromagnetic field energy density, and S is thePoynting vector. Furthermore, as per (5.41), Sν satisfies
∂νSν = 0 . (5.43)
Using definition (5.42) in (5.40), that equation becomes
E⊥ =1
µ0c2SνS
ν . (5.44)
The indefiniteness of the location of the field energy referred to by Feyn-man [100, see p. 27-6] is thus resolved: the electromagnetic field energyresides in the distortions (transverse displacements) of the spacetimecontinuum.
Hence the invariant electromagnetic strain energy density is givenby
E =1
µ0c2SνS
ν (5.45)
where we have used ρ = 0 as per (5.24). This confirms that Sν asdefined in (5.42) is a four-vector.
It is surprising that a longitudinal energy flow term is part of thetransverse strain energy density i.e. S2/µ0c
2 in (5.40). We note thatthis term arises from the time-space components of (5.17) and (5.18)and can be seen to correspond to the transverse displacements along thetime-space planes which are folded along the direction of propagation

70 Chapter 5 Energy in the Spacetime Continuum
in 3-space as the Poynting vector. The electromagnetic field energydensity term Uem
2/µ0 and the electromagnetic field energy flux termS2/µ0c
2 are thus combined into the transverse strain energy density.The negative sign arises from the signature (+ – – –) of the Minkowskimetric tensor ηµν .
This longitudinal electromagnetic energy flux is massless as it is dueto distortion, not dilatation, of the spacetime continuum. However,because this energy flux is along the direction of propagation (i.e. lon-gitudinal), it gives rise to the particle aspect of the electromagneticfield, the photon. As shown in [164, see pp. 174-5] [120, see p. 58], inthe quantum theory of electromagnetic radiation, an intensity operatorderived from the Poynting vector has, as expectation value, photons inthe direction of propagation.
This implies that the (pc)2 term of the energy relation of Special Rel-ativity needs to be separated into transverse and longitudinal masslessterms as follows:
E2 = ρ2c4︸︷︷︸E‖
+ p2‖c
2 + p2⊥c
2︸ ︷︷ ︸massless E⊥
(5.46)
where p‖ is the massless longitudinal momentum density. (5.40) showsthat the electromagnetic field energy density term Uem
2/µ0 is reducedby the electromagnetic field energy flux term S2/µ0c
2 in the transversestrain energy density, due to photons propagating in the longitudinaldirection. Hence we can write [120, see p. 58]∫
V
1
µ0c2S2dV =
∑k
nkhνk. (5.47)
where h is Planck’s constant and nk is the number of photons of fre-quency νk. Thus the kinetic energy is carried by the distortion partof the deformation, while the dilatation part carries only the rest-massenergy, which in this case is 0.
As shown in (5.9), (5.10) and (5.11), the constant of proportionalityto transform energy density squared (E2) into strain energy density (E)is 1/(32κ0):
E‖ =1
32κ0
[ρc2]2
(5.48)
E =1
32κ0E2 (5.49)
E⊥ =1
32κ0
[p2‖c
2 + p2⊥c
2]
=1
4µ0tαβtαβ . (5.50)

§5.4 EM field strain energy density and the photon 71
Substituting (5.40) into (5.50), we obtain
E⊥ =1
32κ0
[p2‖c
2 + p2⊥c
2]
=1
µ0
[Uem
2 − 1
c2S2
](5.51)
and
p2‖c
2 + p2⊥c
2 =32κ0
µ0
[Uem
2 − 1
c2S2
]. (5.52)
This suggests thatµ0 = 32κ0 , (5.53)
to obtain the relation
p2‖c
2 + p2⊥c
2 = Uem2 − 1
c2S2 . (5.54)

72

Chapter 6
Spacetime Continuum Volume Force
§6.1 STC volume force
The volume (or body) force Xν has been introduced in the equilibriumdynamic equation of the spacetime continuum in (3.7) of section §3.2.1viz.
Tµν ;µ = −Xν . (6.1)
Comparison with the corresponding general relativistic expression sho-wed that the volume force is equal to zero at the macroscopic local level.Indeed, as pointed out by Wald [271, see p. 286], in general relativitythe local energy density of matter as measured by a given observer iswell-defined, and the relation
Tµν ;µ = 0 (6.2)
can be taken as expressing local conservation of the energy-momentumof matter.
It was also pointed out in that section that at the microscopic level,energy is known to be conserved only within the limits of the HeisenbergUncertainty Principle, suggesting that the volume force may be verysmall, but not exactly zero. This is analogous to quantum theory wherePlanck’s constant h must be taken into consideration at the microscopiclevel while at the macroscopic level, the limit h→ 0 holds.
In this chapter, we investigate the volume force and its impact onthe equations of the Elastodynamics of the Spacetime Continuum.
§6.2 Linear elastic volume force
First we consider a simple linear elastic volume force. Based on theresults obtained, we will then consider a variation of that linear elasticvolume force based on the Klein-Gordon quantum mechanical currentdensity in the next chapter.
We investigate a volume force that consists of an elastic linear forcein a direction opposite to the displacements. This is the well-knownelastic “spring” force
Xν = k0uν (6.3)

74 Chapter 6 Spacetime Continuum Volume Force
where k0 is the postulated elastic force constant of the spacetime contin-uum volume force. Eq. (6.3) is positive as the volume force Xν is definedpositive in the direction opposite to the displacement [104]. Introduc-tion of this volume force into our previous analysis of the spacetimecontinuum wave equations in sections §3.3 and §3.5 yields the followingrelations.
§6.2.1 Displacement wave equation
Substituting (6.3) into (3.18), viz.
µ0∇2uν + (µ0 + λ0)ε;ν = −Xν , (6.4)
the dynamic equation in terms of displacements becomes
µ0∇2uν + (µ0 + λ0)ε;ν = −k0uν . (6.5)
This equation can be rewritten as
∇2uν +k0
µ0uν = − µ0 + λ0
µ0ε;ν . (6.6)
This displacement equation is similar to a nonhomogeneous Klein-Gor-don equation for a vector field, with a source term.
Separating uν into a longitudinal (irrotational) component uν‖ and a
transverse (solenoidal) component uν⊥ using the Helmholtz theorem infour dimensions [283] according to
uν = uν‖ + uν⊥ , (6.7)
and similarly separating the dilatation current ξν = ε;ν into a longitu-dinal component ξν‖ and a transverse component ξν⊥
ξν = ξν‖ + ξν⊥ , (6.8)
and substituting into (6.6), we obtain the separated equations
∇2uν‖ +k0
µ0uν‖ = − µ0 + λ0
µ0ξν‖
∇2uν⊥ +k0
µ0uν⊥ = − µ0 + λ0
µ0ξν⊥
(6.9)
which becomes
∇2uν⊥ +k0
µ0uν⊥ = 0 (6.10)
in the case where ξν⊥ = 0. The wave equation for uν‖ describes thepropagation of longitudinal displacements, while the wave equation foruν⊥ describes the propagation of transverse displacements.

§6.2 Linear elastic volume force 75
§6.2.2 Wave equations
Additional wave equations as shown in section §3.5, can be derived fromthis volume force.
Dilatational (longitudinal) wave equation. Substituting (6.3) into(3.35), viz.
(2µ0 + λ0)∇2ε = −Xν;ν , (6.11)
the longitudinal (dilatational) wave equation becomes
(2µ0 + λ0)∇2ε = −k0uν
;ν . (6.12)
Using uµ;µ = ε from (3.5) and rearranging, this equation can be rewrit-ten as
∇2ε+k0
2µ0 + λ0ε = 0 . (6.13)
This wave equation applies to the volume dilatation ε. This equation issimilar to the homogeneous Klein-Gordon equation for a scalar field, afield whose quanta are spinless particles [113].
Rotational (transverse) wave equation. Substituting (6.3) into(3.39), viz.
µ0∇2ωµν = −X [µ;ν] , (6.14)
the transverse (rotational) wave equation becomes
µ0∇2ωµν = − k0
2(uµ;ν − uν;µ) . (6.15)
Using the definition of ωµν from (3.3) and rearranging, this equationcan be rewritten as
∇2ωµν +k0
µ0ωµν = 0 . (6.16)
This antisymmetric equation is also similar to an homogeneous Klein-Gordon equation for an antisymmetric tensor field.
Strain (symmetric) wave equation. Substituting (6.3) into (3.42),viz.
µ0∇2εµν + (µ0 + λ0)ε;µν = −X(µ;ν), (6.17)
the symmetric (strain) wave equation becomes
µ0∇2εµν + (µ0 + λ0)ε;µν = − k0
2(uµ;ν + uν;µ). (6.18)

76 Chapter 6 Spacetime Continuum Volume Force
Using the definition of εµν from (3.2) and rearranging, this equation canbe rewritten as
∇2εµν +k0
µ0εµν = − µ0 + λ0
µ0ε;µν . (6.19)
This symmetric equation is also similar to a nonhomogeneous Klein-Gordon equation for a symmetric tensor field with a source term.
§6.2.3 Electromagnetism
We consider the impact of this volume force on the equations of elec-tromagnetism derived previously. Substituting (6.3) into (4.20), viz.
ωµν ;µ =2µ0 + λ0
2µ0ε;ν +
1
2µ0Xν , (6.20)
Maxwell’s equations in terms of the rotation tensor become
ωµν ;µ =2µ0 + λ0
2µ0ε;ν +
k0
2µ0uν . (6.21)
Separating uν into its longitudinal (irrotational) component uν‖ and its
transverse (solenoidal) component uν⊥ using the Helmholtz theorem infour dimensions [283] according to
uν = uν‖ + uν⊥, (6.22)
substituting for ωµν from Fµν = ϕ0ωµν and for uν⊥ from Aµ = − 1
2 ϕ0uµ⊥,
this equation becomes
Fµν ;µ = ϕ02µ0 + λ0
2µ0ε;ν +
ϕ0k0
2µ0uν‖ −
k0
µ0Aν . (6.23)
Proper treatment of this case requires that the current density four-vector be proportional to the RHS of (6.23) as follows:
µ0jν =
ϕ0
2µ0
[(2µ0 + λ0) ε;ν + k0u
ν‖
]− k0
µ0Aν . (6.24)
This thus yields the following microscopic form of the current densityfour-vector:
jν =ϕ0
2µ0µ0
[(2µ0 + λ0)ε;ν + k0u
ν‖
]− k0
µ0µ0Aν . (6.25)

§6.3 Discussion of linear elastic volume force results 77
We thus find that the second term is proportional to Aν as is thesecond term of the current density obtained from the quantum mechani-cal Klein-Gordon equation with an electromagnetic field [113, see p. 35].in addition, we find that jν includes a longitudinal component k0u
ν‖
propagating along the direction of propagation.
§6.3 Discussion of linear elastic volume force results
This section has been useful in that consideration of a simple linearelastic volume force leads to equations which are of the Klein-Gordontype. The wave equations that are obtained for the scalar ε, the 4-vector uν , and the symmetric and antisymmetric tensors εµν and ωµν
respectively, are all equations that are similar to homogeneous or non-homogeneous Klein-Gordon equations. The solutions of these equationsare well understood [216, see pp. 414–433].
It should be noted that we cannot simply put
m2c2
~2=
k0
2µ0 + λ0(6.26)
orm2c2
~2=k0
µ0(6.27)
from the Klein-Gordon equation, as the expression to use depends onthe wave equation considered. This ambiguity in the equivalency of theconstant m2c2/~2 to STCED constants indicates that the postulatedelastic linear volume force proposed in (6.3) is not quite correct, even ifit is a step in the right direction. It has provided insight into the impactof the volume force on this analysis, but the volume force is not quitethe simple linear elastic expression considered in (6.3).
In the next chapter, we will derive a volume force from the generalcurrent density four-vector expression (4.27) seen previously in section§4.6.2. We find that the volume force (6.3) and consequently the currentdensity four-vector (6.25) need to be modified.
§6.4 Designer STC volume forces
The spacetime continuum volume force can thus be tailored to the space-time continuum characteristics. This we half-jokingly refer to as de-signer volume forces, that is volume forces designed to meet the needsof the spacetime continuum under consideration. This approach is simi-lar to that followed to design Lagrangians in quantum electrodynamics.

78 Chapter 6 Spacetime Continuum Volume Force
As we will see in the upcoming chapters on spacetime continuum de-fects, the characteristics of the spacetime continuum can vary dependingon the nature and density of defects in its structure.
In the next chapter 7, we derive a quantum mechanical volume forcebased on the similarity in the structure of the current density four-vectorin STCED and that derived from the spin-0 Klein-Gordon equation. Itis expected that other STC volume forces can be derived from similaridentifications with other equations.
Eshelby [92] and deWit [60, 61] point out that a fictitious volumeforce can be used to simulate the field of a defect in the spacetime contin-uum. deWit [61] provides examples, including one for an isotropic con-tinuum. This approach provides another method of obtaining spacetimecontinuum volume forces tailored to the characteristics of the spacetimecontinuum. This is considered further in section §8.4.

Chapter 7
Quantum Mechanical Volume Force
§7.1 Derivation of a quantum mechanical volume force
In this chapter, we derive a quantum mechanical volume force basedon the similarity in the structure of the current density four-vector inSTCED and the one from the spin-0 Klein-Gordon equation. Henceone identification of the volume force based on quantum mechanicalconsiderations is possible by comparing (4.27), viz.
jν =1
2
ϕ0
µ0 µ0
[(2µ0 + λ0)ε;ν +Xν
], (7.1)
with the quantum mechanical expression of the current density four-vector jν obtained from the Klein-Gordon equation for a spin-0 particle.The Klein-Gordon equation can also describe the interaction of a spin-0particle with an electromagnetic field. The current density four-vectorjν in that case is written as [113, see p. 35]
jν =ie~2m
(ψ∗∂νψ − ψ ∂νψ∗)− e2
mAν(ψψ∗) (7.2)
where the superscript ∗ denotes complex conjugation.The first term of (7.2) includes the following derivative-like expres-
sion:i(ψ∗∂νψ − ψ ∂νψ∗). (7.3)
It is generated by multiplying the Klein-Gordon equation for ψ by ψ∗
and subtracting the complex conjugate [113]. The general form of theexpression can be generated by writing
ψ ∼ exp(iϑ) (7.4)
which is a qualitative representation of the wavefunction. One can thensee that with (7.4), the expression
∂ν(ψψ∗) (7.5)
has the qualitative structure of (7.3) although it is not strictly equiva-lent. However, given that the steps followed to generate (7.3) are not

80 Chapter 7 Quantum Mechanical Volume Force
repeated in this derivation, strict equivalence is not expected. Replacing(7.3) with (7.5), (7.2) becomes
jν =e~2m
∂ν(ψψ∗)− e2
mAν(ψψ∗) . (7.6)
We see that the first term of (7.6) is similar to the first term of (7.1)and setting them to be equal, we obtain
ϕ0
2µ0 µ0(2µ0 + λ0)ε;ν =
e~2m
∂ν(ψψ∗). (7.7)
Similarly, the second terms of (7.1) and (7.2) are also similar and settingthem to be equal, we obtain
ϕ0
2µ0 µ0Xν = −e
2
mAν(ψψ∗). (7.8)
The equalities (7.7) and (7.8) thus result from the comparison of (7.1)and (7.2).
The first identification that can be determined from (7.7) is
ε (xµ) = υ0ψψ∗ (7.9)
where the proportionality constant has been set to υ0 which has unitsof [m3]. While ε which is the change in volume per original volumeas a function of position xµ, which is stated explicitly in (7.9), is adimensionless quantity, the Klein-Gordon wavefunction ψ has units ofL−Nn/2 and the norm of the wavefunction ψψ∗ has units L−Nn whereN is the number of particles and n is the number of spatial dimensions.For one particle in three-dimensional space, the units of the propor-tionality constant υ0 are thus [m3]. This equation indicates that theKlein-Gordon quantum mechanical wavefunction describes longitudinalwave propagations in the spacetime continuum corresponding to thevolume dilatation associated with the particle property of an object.
Making use of (7.9) in (7.7), the STC electromagnetic shearing po-tential constant ϕ0 of (4.4) is then given by:
ϕ0 =2µ0
2µ0 + λ0
µ0
υ0
e~2m
. (7.10)
The units of ϕ0 are [V · s ·m−2] or [T] as required. Using (7.5) and (7.9)in (7.2), we obtain
jν =e~
2mυ0ε;ν − e2
mυ0Aνε (xµ) . (7.11)

§7.1 Derivation of a QM volume force 81
The units of jν are [C · s−1 ·m−2] as required.
Using (4.4) viz.
Aν = − 12 ϕ0u
ν⊥ (7.12)
and (7.9) in (7.8), the quantum mechanical volume force is given by
Xν =µ0µ0
υ0
e2
mε (xµ) uν⊥. (7.13)
Using the definition for the dimensionless fine structure constant α =µ0ce
2/h, (7.13) becomes
Xν =µ0α
υ0
h
mcε (xµ) uν⊥ (7.14)
or
Xν =µ0α
υ0λc ε (xµ) uν⊥ (7.15)
where λc = h/mc is the electron’s Compton wavelength.
Thus the STCED elastic force constant of (6.3) is given by
k0 =µ0µ0
υ0
e2
m=µ0α
υ0
h
mc=µ0α
υ0λc , (7.16)
where we have included the constant υ0 in k0. The volume force isproportional to ε (xµ)uν⊥ as opposed to just uν as in (6.3):
Xν = k0 ε (xµ) uν⊥ . (7.17)
The units are [N ·m−3] as expected.
The volume force Xν is proportional to the Planck constant as sus-pected previously. This explains why the volume force tends to zeroin the macroscopic case. The volume force is also proportional to theSTC volume dilatation ε (xµ) in addition to the displacements uν⊥. Thismakes sense as all deformations, both distortions and dilatations, shouldbe subject to the STC elastic spring force. This is similar to an elasticspring law as Xν is defined positive in the direction opposite to the dis-placement [104]. The volume force also describes the interaction with anelectromagnetic field given that (7.2) from which it is derived includeselectromagnetic interactions.

82 Chapter 7 Quantum Mechanical Volume Force
§7.2 Displacements equation
Substituting (7.17) into (6.4), the dynamic equation in terms of dis-placements becomes
µ0∇2uν + (µ0 + λ0)ε;ν = −k0 ε(xµ)uν⊥. (7.18)
This equation can be rewritten as
∇2uν +k0
µ0ε (xµ) uν⊥ = − µ0 + λ0
µ0ε;ν . (7.19)
We note that ε(xµ) is a scalar function of 4-position only, and plays a rolesimilar to the potential V (r ) in the Schrodinger equation. Indeed, ε(xµ)represents the mass energy structure (similar to an energy potential)impacting the solutions of this equation.
Separating uν into its longitudinal (irrotational) component uν‖ and
its transverse (solenoidal) component uν⊥ using the Helmholtz theoremin four dimensions [283] according to
uν = uν‖ + uν⊥ , (7.20)
and similarly separating the dilatation current ξν = ε;ν into a longitu-dinal component ξν‖ and a transverse component ξν⊥
ξν = ξν‖ + ξν⊥ , (7.21)
we obtain the separated equations
∇2uν‖ = − µ0 + λ0
µ0ξν‖
∇2uν⊥ +k0
µ0uν⊥ = − µ0 + λ0
µ0ξν⊥
(7.22)
which becomes
∇2uν⊥ +k0
µ0uν⊥ = 0 (7.23)
in the case where ξν⊥ = 0. The wave equation for uν‖ describes thepropagation of longitudinal displacements, while the wave equation foruν⊥ describes the propagation of transverse displacements.

§7.3 Wave equations 83
§7.2.1 Longitudinal displacements equation
Substituting for ε;ν from (7.11) in the first equation of (7.22), we obtain
∇2uν‖ = −2kL~
(e2
mυ0 j
ν + eAνε (xµ)
)(7.24)
where the dimensionless ratio
kL =µ0 + λ0
µ0(7.25)
has been introduced. Hence the source term on the RHS of this equa-tion includes the mass resulting from the dilatation displacements, thecurrent density four-vector, and the vector potential resulting from thedistortion displacements. It provides a full description of the gravita-tional and electromagnetic interactions at the microscopic level.
§7.2.2 Transverse displacements equation
Substituting for uν⊥ from (4.4) in the second equation of (7.22), weobtain
∇2Aν +k0
µ0ε (xµ) Aν = 0. (7.26)
Substituting for k0 from (7.16), this equation becomes
∇2Aν +µ0
υ0
e2
mε (xµ) Aν = 0 (7.27)
or
∇2Aν +α
υ0
h
mcε (xµ) Aν = 0 . (7.28)
This equation is similar to a Proca equation except that the coefficient ofAν is not the familiar m2c2/~2. Given that transverse displacements aremassless, the Proca equation coefficient is not expected given its usualinterpretation that it represents the mass of the particle described bythe equation. This is discussed in more details in section §7.3.5.
§7.3 Wave equations
We derive the additional wave equations as shown in section §3.5, fromthis volume force.

84 Chapter 7 Quantum Mechanical Volume Force
§7.3.1 Longitudinal wave equation
Substituting (7.17) into (6.11), the longitudinal (dilatational) wave equ-ation becomes
(2µ0 + λ0)∇2ε = −∇ν[k0 ε (xµ) uν⊥
]. (7.29)
Taking the divergence on the RHS, using uν⊥;ν = 0 from (3.6) andrearranging, this equation can be rewritten as
∇2ε = − k0
2µ0 + λ0uν⊥ε;ν . (7.30)
Substituting for uν⊥ from (4.4), for k0 from (7.16) and for ε;ν from (7.11),we obtain
∇2ε− 4e2
~2AνAν ε = 4
mυ0
~2Aνjν . (7.31)
Recognizing thate2AνAν = P νPν = −m2c2, (7.32)
and substituting in (7.31), the equation becomes
∇2ε+ 4m2c2
~2ε = 4
mυ0
~2Aνjν . (7.33)
This is the Klein-Gordon equation except for the factor of 4 multiplyingthe ε coefficient and the source term. The term on the RHS of thisequation is an interaction term of the form A · j.
As identified from (7.9) and confirmed by this equation, the Klein-Gordon quantum mechanical wavefunction describes longitudinal wavepropagations in the spacetime continuum corresponding to the volumedilatation associated with the particle property of an object. The RHSof the equation indicates an interaction between the longitudinal currentdensity jν and the transverse vector potential Aν . This is interpretedin electromagnetism as energy in the static magnetic induction field toestablish the steady current distribution [52, see p. 150]. It is also theform of the interaction term introduced in the vacuum Lagrangian forclassical electrodynamics [197, see p. 428].
Although (7.33) with the m2c2/~2 coefficient is how the Klein-Gor-don equation is typically written, (7.31) is a more physically accurateway of writing that equation, i.e.
~2
4∇2ε− e2AνAν ε = mυ0A
νjν , (7.34)

§7.3 Wave equations 85
as the massive nature of the equation resides in its solutions ε (xµ). Theconstant m needs to be interpreted in the same way as the constant e.The constant e in the Klein-Gordon equation is the elementary unit ofelectrical charge (notwithstanding the quark fractional charges), not theelectrical charge of the particle represented by the equation. Similarly,the constant m in the Klein-Gordon equation needs to be interpretedas the elementary unit of mass (the electron’s mass), not the mass ofthe particle represented by the equation. That is obtained from thesolutions ε (xµ) of the equation.
§7.3.2 Transverse wave equation
Using (7.17) into (6.14), the transverse (rotational) wave equation be-comes
µ0∇2ωµν = − k0
2[(εuµ⊥);ν − (εuν⊥);µ] . (7.35)
Using (3.3) and rearranging, this equation can be rewritten as
∇2ωµν +k0
µ0ε (xµ) ωµν =
1
2
k0
µ0(ε;µuν⊥ − ε;νuµ⊥) . (7.36)
Substituting for ωµν using Fµν = ϕ0ωµν from (4.3), for uν⊥ from (4.4),
for k0 from (7.16) and for ε;ν from (7.11), we obtain
∇2Fµν +µ0
υ0
e2
mε (xµ) Fµν = µ0
e
~(Aµjν −Aνjµ) . (7.37)
This equation can also be written as
∇2Fµν +α
υ0λc ε (xµ) Fµν = µ0
e
~(Aµjν −Aνjµ) . (7.38)
This is a new equation of the electromagnetic field strength Fµν . Theterm on the RHS of this equation is an interaction term of the formA×j.In electromagnetism, this term is the volume density of the magnetictorque (magnetic torque density), and is interpreted as the “longitu-dinal tension” between two successive current elements (Helmholtz’slongitudinal tension), observed experimentally by Ampere (hairpin ex-periment) [228].
§7.3.3 Strain wave equation
Substituting (7.17) into (6.17), the strain (symmetric) wave equationbecomes
µ0∇2εµν + (µ0 + λ0)ε;µν = − k0
2[(εuµ⊥);ν + (εuν⊥);µ] (7.39)

86 Chapter 7 Quantum Mechanical Volume Force
which can be rewritten as
∇2εµν +µ0 + λ0
µ0ε;µν =
=1
2
k0
µ0[ε (uµ;ν
⊥ + uν;µ⊥ ) + (ε;µuν⊥ + ε;νuµ⊥)] .
(7.40)
Substituting for uν⊥ from (4.4), for k0 from (7.16) and for ε;ν from (7.11),we obtain
∇2εµν + kL ε;µν = kT
2m
~2(Aµjν +Aνjµ) +
+kTε
υ0
[e
~(Aµ;ν +Aν;µ) +
2e2
~2(AµAν +AνAµ)
] (7.41)
where the dimensionless ratio
kT =2µ0 + λ0
µ0(7.42)
has been introduced and ratio kL has been used from (7.25). The lastterm can be summed to 2AµAν . This new equation for the symmetricstrain tensor field includes on the RHS symmetric interaction terms be-tween the current density four-vector and the vector potential resultingfrom the distortion displacements and between the vector potential andthe mass resulting from the dilatation displacements.
§7.3.4 Simplified wave equations
Inspection of the wave equations derived previously shows that commonfactors are associated with Aν and jν in all the equations. We thusintroduce the reduced physical variables A∗ν and j∗ν defined accordingto
A∗ν = eAν
j∗ν =m
ejν ,
(7.43)
and A∗ν and j∗ν defined according to
A∗ν =2e
~Aν
j∗ν =2m
e~jν .
(7.44)

§7.3 Wave equations 87
The various wave equations then simplify to the following.
Longitudinal displacements equation
∇2uν‖ = −2kL~
(υ0 j∗ν + εA∗ν) (7.45)
∇2uν‖ = −kL(υ0 j
∗ν + εA∗ν)
(7.46)
Transverse displacements equation
∇2A∗ν +α
υ0λc εA
∗ν = 0 (7.47)
∇2A∗ν +α
υ0λc εA
∗ν = 0 (7.48)
Longitudinal wave equation
~2
4∇2ε−A∗νA∗ν ε = υ0A
∗νj∗ν (7.49)
∇2ε−A∗νA∗ν ε = υ0A∗νj∗
ν(7.50)
Transverse wave equation
∇2Fµν +α
υ0λc ε (xµ) Fµν = µ0
e
~m(A∗µj∗ν −A∗νj∗µ) (7.51)
∇2Fµν +α
υ0λc ε (xµ) Fµν = 1
2 µ0 µB(A∗µj∗ν −A∗νj∗µ
)(7.52)
Strain wave equation
∇2εµν + kL ε;µν = kT
2
~2(A∗µj∗ν +A∗νj∗µ) +
+kTε
υ0
[1
~(A∗µ;ν +A∗ν;µ) +
2
~2(A∗µA∗ν +A∗νA∗µ)
] (7.53)
∇2εµν + kL ε;µν = 1
2 kT(A∗µj∗ν +A∗νj∗µ
)+
+ 12 kT
ε
υ0[(A∗µ;ν +A∗ν;µ) + (A∗µA∗ν +A∗νA∗µ)]
(7.54)

88 Chapter 7 Quantum Mechanical Volume Force
§7.3.5 Proca wave equation
As seen in section §4.8.2, a Proca-like equation (4.37) is obtained fromthe electromagnetic equations with a volume force Xν given by
∇2Aν −Aµ;νµ −
ϕ0
2µ0Xν = µ0 j
νclassical . (7.55)
Using the volume force derived from (7.8) and (7.9), (7.55) becomes
∇2Aν −Aµ;νµ +
µ0e2
m
ε(xµ)
υ0Aν = µ0 j
νclassical . (7.56)
Re-arranging the derivatives in the second term on the L.H.S. and usingthe Lorenz condition (4.16), we obtain
∇2Aν +µ0e
2
m
ε(xµ)
υ0Aν = µ0 j
νclassical (7.57)
which is similar to (7.27) obtained previously in section §7.2.2. Thisequation can be rewritten as
∇2Aν + αh
mc
ε(xµ)
υ0Aν = µ0 j
νclassical . (7.58)
This equation has the same structure as the Proca equation, althoughthe coefficient of the second term on the L.H.S. is not the familiar(mc/~)2.
§7.4 Alternative derivation of the quantum mechanicalvolume force
In this section we consider an alternative derivation of the quantummechanical volume force from the comparison of (7.1) viz.
jν =1
2
ϕ0
µ0 µ0
[(2µ0 + λ0)ε;ν +Xν
](7.59)
and (7.2) viz.
jν =ie~2m
(ψ∗∂νψ − ψ ∂νψ∗)− e2
mAν(ψψ∗) . (7.60)
Based on (7.4), we write ψ as
ψ = A exp(iϑ) (7.61)

§7.4 Alternative derivation of the QM volume force 89
where A is the amplitude of the wavefunction. Then
∂νψ = iA exp(iϑ) ∂νϑ (7.62)
and
i(ψ∗∂νψ − ψ ∂νψ∗) = −2A∗A ∂νϑ = −2 |A|2 ∂νϑ (7.63)
which can be seen to be a type of antisymmetrical derivative
∂ν(ψψ∗) = i(ψ∗∂νψ − ψ ∂νψ∗) , (7.64)
to generate a transverse quantity in line with (7.60) which is an equationfor the transverse current jν = jν⊥ in terms of the transverse vectorpotential Aν ∝ uν⊥.
Substituting (7.61) and (7.63) into (7.60), we obtain
jν = −e~m|A|2 ∂νϑ− e2
m|A|2Aν (7.65)
or
jν = − e
m|A|2 [~ ∂νϑ+ eAν ] . (7.66)
Comparing (7.59) and (7.65), the first term of (7.59) is similar to thefirst term of (7.65) and setting them to be equal, we obtain
ϕ0
2µ0 µ0(2µ0 + λ0)ε;ν = −e~
m|A|2 ∂νϑ . (7.67)
Similarly, the second terms of (7.59) and (7.65) are also similar andsetting them to be equal, we obtain
ϕ0
2µ0 µ0Xν = −e
2
m|A|2Aν . (7.68)
The equalities (7.67) and (7.68) result from the comparison of (7.59)and (7.60).
From (7.67) and (7.63), we see that
ε;ν = −2 υ0|A|2 ∂νϑ (7.69)
and hence
ε (xµ) = υ0|A|2 (7.70)

90 Chapter 7 Quantum Mechanical Volume Force
where the proportionality constant υ0 has been introduced as in §7.1.This leads to the STC electromagnetic shearing potential constant ϕ0
as defined previously in (7.10):
ϕ0 =2µ0
2µ0 + λ0
µ0
υ0
e~2m
. (7.71)
Setting ε (xµ) = υ0ψψ∗ = υ0|A|2 as done in (7.9), results in the volume
force Xν (7.17) as used in section §7.1. Setting ε;ν equal to (7.63) leadsto relation (7.7) and the results of sections §7.1 to §7.3.
However, the approach followed in this section provides another wayof allocating the variables. In the relations (7.67) and (7.68), the factor|A|2 is common to both, and represents the intensity of the unnormal-ized wavefunction. We see that the current density jν given by (7.66)consists of the ratio e/m multiplied by the intensity of the wavefunctionand by the sum of two terms, the first representing the energy in thewave from (7.67) and the second the energy from the vector potentialfrom (7.68).
From (7.68), we can determine the volume force, given by
Xν = −2µ0 µ0
ϕ0
e2
m|A|2Aν . (7.72)
Using (4.4), (7.72) can be rewritten as
Xν = µ0 µ0e2
m|A|2 uν⊥ . (7.73)
Defining k0, the elastic force constant of the STC volume force, givenby
k0 = µ0 µ0e2
m= µ0α
h
mc, (7.74)
then the volume force is given by
Xν = k0 |A|2 uν⊥ . (7.75)
Setting ε (xµ) = υ0ψψ∗ = υ0|A|2, we obtain (7.16) and (7.17) as previ-
ously:
k′0 =µ0µ0
υ0
e2
m=µ0α
υ0
h
mc, (7.76)
where we have included the constant υ0 in k′0. Then the volume forceis proportional to ε (xµ)uν⊥ as previously:
Xν = k′0 ε (xµ) uν⊥ . (7.77)

§7.4 Alternative derivation of the QM volume force 91
Eq. (7.77) is equivalent to (7.75).Using the volume force (7.72) in (7.59), the following expression is
obtained for ξν = ε;ν :
ε;ν =2µ0
2µ0 + λ0
µ0
ϕ0
[jν +
e2
m|A|2Aν
]. (7.78)
This equation is the same as the one used in sections §7.1 to §7.3 ob-tained by setting ε (xµ) = υ0ψψ
∗ = υ0|A|2. From (7.67), we can alsowrite
ε;ν = − 2µ0
2µ0 + λ0
µ0
ϕ0
e~m|A|2 ∂νϑ . (7.79)
Equating (7.78) and (7.79), we obtain
jν = − e
m|A|2 [~ ∂νϑ+ eAν ] (7.80)
which is the same as (7.66), indicating that the equations are self-consis-tent.
Usingϑ = kµx
µ , (7.81)
where kµ is the 4-vector wavevector given by (ω/c,k), ∂νϑ is given by
∂νϑ = kν (7.82)
and (7.80) becomes
jν = − e
m|A|2 [~ kν + eAν ] . (7.83)
The time component is given by
jt = − e
mc|A|2 [~ω + eφ] . (7.84)
and the space component by
j = − e
m|A|2 [~k + eA] . (7.85)
We obtain explicitly the sum of two terms, with the first giving theenergy in the wave given by the Einstein quantum mechanical expressionand the second giving the energy in the vector potential.
Substituting (7.82) into (7.79), the dilatation current becomes
ξν = ε;ν = − 2µ0
2µ0 + λ0
µ0
ϕ0
e~m|A|2 kν = −2 υ0|A|2 kν (7.86)

92 Chapter 7 Quantum Mechanical Volume Force
or alternatively
ξν = ε;ν = − 2µ0
2µ0 + λ0
µ0
ϕ0υ0
e~mε (xµ) kν = −2 ε (xµ) kν . (7.87)
These results are supplemental to those of sections §7.1 to §7.3.
§7.5 Alternative volume forces
This chapter provides an example of a volume force derived from com-parison with the Klein-Gordon current density for spin-0 particles withelectromagnetic interaction. It has one unknown parameter υ0, of units[m−3], which corresponds to the normalization factor for the Klein-Gordon wavefunction norm. It corresponds to an inverse volume andcould be set to an appropriate constant such as
υ0 =(mc
~
)3
(7.88)
orυ0 = (b0)
−3. (7.89)
The actual value depends on the actual equivalent Klein-Gordon solu-tions under consideration.
This procedure of devising a volume force for a given situation pro-vides one approach to dealing with quantum physics in STCED. Thisis an approach similar to how Lagrangians are determined in quantumelectrodynamics. The results obtained in this chapter provide interest-ing insights into the physical nature of the quantum level. However, theKlein-Gordon equation has limitations as a relativistic quantum waveequation [113], and the quantum mechanical volume force derived fromthe equation should thus be considered to have limited application. Insubsequent chapters, we consider a more general approach to analyz-ing quantum physics based on the analysis of defects in the spacetimecontinuum.

Chapter 8
Defects in the Spacetime Continuum
§8.1 Analysis of spacetime continuum defects
Given that the spacetime continuum behaves as a deformable medium,there is no reason not to expect dislocations, disclinations and otherdefects to be present in the spacetime continuum. Dislocations anddisclinations of the spacetime continuum represent the fundamental dis-placement processes that occur in its structure. These fundamentaldisplacement processes should correspond to basic quantum phenom-ena and provide a framework for the description of quantum physics inSTCED.
In the following chapters, we use the word defect to mean specif-ically dislocations and disclinations, but without in general excludingother defects such as point defects. Dislocations are translational defor-mations, while disclinations are rotational deformations. Defects canbe characterized using the Volterra [269] classification or using the the-ory of topological stability [151]. The two methods are not equivalentand the topological classification is usually used as a supplement to theVolterra classification.
Dislocations and disclinations can be analyzed as either discrete de-fect lines, continuous infinitesimal defect loops, or as continuous distri-butions of defect densities [62], which is more suited to the methods ofdifferential geometry. This breakdown applies both to dislocations anddisclinations. The theory of disclinations is an extension of dislocationtheory, that includes both dislocations and disclinations. It reduces todislocation theory in the absence of disclinations.
Using defect density distributions results in field equations usingthe methods of differential geometry. These are also amenable to gaugetheories and the modern theoretical descriptions are mostly in terms ofgauge theory and differential geometry, using continuous distributions ofdefect densities (see for example [149]). Defect theory is applied mostlyto condensed matter physics, although the extension of differential ge-ometry methods to cosmic strings is an ongoing effort.
We will cover the analysis of distributions of defect densities in a laterseparate chapter (chapter 11). In the following chapters on dislocationsand disclinations, we cover discrete line defects, and to some degree,

94 Chapter 8 Defects in the Spacetime Continuum
infinitesimal defect loops, both of which are not given much coveragein modern defect analysis. These we will find provide a description ofbasic quantum processes in the microscopic description of the spacetimecontinuum.
Our analysis of spacetime defects is done in the isotropic linear elas-tic continuum we have been considering till now. However, it shouldbe noted that modern defect theory in condensed matter physics is anadvanced discipline that is rich in results derived from more complexcontinuum models.
Volterra [269] first studied and classified the elastic deformations ofmultiply-connected solids in 1907. These he named distortions, whichwas later changed by Love [165] to dislocations. The growing impor-tance of rotational dislocations prompted Frank [105] to rename those todisinclinations which he later shortened to disclinations, the term that isstill used today [60]. Defect theory has been the subject of investigationsince the first half of the twentieth century and is a well-developed dis-cipline in continuum mechanics [123, 132, 153, 159, 198, 273]. The morerecent formulation of defects in solids is based on gauge theory anddifferential geometry as discussed previously [73,149].
The last quarter of the twentieth century has seen the investiga-tion of spacetime topological defects in the context of string theory,particularly cosmic strings [169, 219], and cosmic expansion [230, 253].Teleparallel spacetime with defects [169,267,268] has resulted in a differ-ential geometry of defects, which can be folded into the Einstein-CartanTheory (ECT) of gravitation, an extension of Einstein’s theory of grav-itation that includes torsion [230, 231]. Recently, the phenomenologyof spacetime defects has been considered in the context of quantumgravity [128–130].
There are many papers that have been published on the subjectof defects in the spacetime continuum. Unfortunately, like all areasunder development, there are papers that have errors, while others haveinconsistencies that are not fatal, but that lead to conclusions that arequestionable if not incorrect. The specific papers will in most casesnot be identified, although some may be mentioned where required.While not claiming to be infallible, the results presented in the followingchapters on defects in the spacetime continuum and its application toquantum physics provide a self-consistent picture in agreement with theestablished references in this area of research.

§8.2 Defects in four-dimensional spacetime 95
§8.2 Defects in four-dimensional spacetime
The theory of defects in three-dimensional space is well developed, in-cluding non-linearity, finite displacements, fracture mechanics, etc. Thetheory of defects in four-dimensional spacetime is limited to an elastichomogeneous spacetime continuum, based on the properties indicatedby the physical laws, as discussed in section §2.1.
The challenge we face lies in extending the three-dimensional elastichomogeneous space theory to four dimensions. For example, Puntigamet al [219], in extending the Volterra defect analysis from three to fourdimensions, considered the problem topologically, deforming Minkowskispacetime by 4 dislocations and 6 disclinations into 10 differently struc-tured Riemann-Cartan spacetimes. Instead of the process described byVolterra [269], the cut is three-dimensional (instead of two-dimensionalas in the Volterra process). Although this is a mathematically validprocedure which may well bring to light new physical processes, this isnot strictly equivalent to Volterra’s analysis.
An equally valid approach is to apply Volterra’s analysis to the four-dimensional spacetime continuum. Then the challenge is the applicationof the analysis to cases that involve the time ct dimension, such as forexample a screw dislocation or an edge dislocation along the ct-axis.The problem then becomes one of analyzing the ct-axis consequenceson a case-by-case basis as we will see in the following chapters.
As noted by Nabarro [200, see p. 588], Frank seems to have beenthe first to have raised the possibility of time-like dislocations, in whicha clock taken around a circuit would lose or gain a definite interval oftime.
§8.3 Defects and the incompatibility tensor
The spacetime continuum overall is isotropic and elastic, with defects inits structure. The approach followed in our analysis of spacetime con-tinuum defects is to start from the elastic theory and add the defects todetermine their impact. We thus consider an elastic isotropic homoge-neous spacetime continuum as our starting point. The distortion tensorβµν is defined according to [59]
βµν = uµ;ν (8.1)
which equals, as per (3.4),
βµν = εµν + ωµν (8.2)

96 Chapter 8 Defects in the Spacetime Continuum
where εµν is the symmetric strain tensor and ωµν is the antisymmetricrotation tensor.
The strain tensor is also subject to compatibility conditions which areboth necessary and sufficient conditions to determine a single-valued dis-placement field uµ. The compatibility conditions are valid in a simply-connected continuum∗ such that when it is deformed, it remains contin-uous, free of gaps. The compatibility conditions in three-dimensionalspace are written as
∇×∇× ε = εijk εlmn εil,jm = 0 (8.3)
where εijk is the permutation symbol. There is no straightforward equiv-alent of the curl operator (or cross-product) in four dimensions, so careis required when converting (8.3) for the spacetime continuum.
The derivation in [119, see p. 262] shows that conversion of three-dimensional indices to four-dimensional indices is valid in this case, re-sulting in the following compatibility equations:
εµν;αβ + εαβ;µν − εµβ;να − εαν;βµ = 0 . (8.4)
Provided that the permutation symbol in the four-dimensional space-time continuum εαβγ is defined as per the three-dimensional permuta-tion symbol, i.e. equal to +1 for even permutations of αβγ, −1 for oddpermutations of αβγ, 0 for other cases, we can write
inc εµν = εαγµ εβδν εαβ;γδ = 0 (8.5)
where inc is the incompatibility operator. There are 10 linearly inde-pendent conditions in four dimensions.
In defect theory, gaps are generated as a result of the defect defor-mations, and the continuum can become multiply-connected. In thatcase, the compatibility conditions may not be equal to zero, but ratherequal to the incompatibility tensor, ıµν :
inc εµν = ıµν . (8.6)
This tensor is symmetric and satisfies the continuity condition
ıµν ;ν = 0 . (8.7)
∗In a simply-connected continuum, a closed curve within the continuum can beshrunk to a point.

§8.4 Defects and the volume force 97
The properties of the incompatibility tensor will be explored further inlater sections.
For an elastic strain tensor, the incompatibility tensor ıµν = 0 as thespacetime continuum is then simply-connected. An elastic continuumwith defects will include localized defects where the incompatibility ten-sor is not zero, in a continuum that obeys the compatibility conditions(8.5) in most locations. The strain tensor can then be broken downinto [60]
∗εµν = εµν + /εµν (8.8)
where ∗εµν represents the total (effective) strain tensor including thedefects, εµν is the elastic strain tensor and /εµν is the defect strain ten-sor. Note that the defect tensors are also often referred to as plasticfields to denote non-elastic plastic deformations in the field theory ofelastoplasticity.
Substituting (8.8) into (8.6), the incompatibility tensor is then givenby
ıµν = inc ∗εµν = εαγµ εβδν /εαβ;γδ (8.9)
where we have usedinc εµν = 0 (8.10)
for the elastic strain tensor εµν .Similarly, the rotation tensor and the distortion tensor can usually
be separated into elastic and defect parts,
∗ωµν = ωµν + /ωµν (8.11)
∗βµν = βµν + /βµν . (8.12)
However, the displacement uµ cannot be split into elastic and defectparts in all cases [62].
§8.4 Defects and the volume force
As mentioned in §8.3, the strain tensor in the elastic homogeneous space-time continuum considered in this book is elastic and the incompatibilitytensor ıµν = 0. However, defects in the spacetime continuum introduceimperfections in the continuum that can result in the incompatibilitytensor ıµν 6= 0. Eshelby [60, 92] showed that a defect described by astrain tensor /εµν can be represented by a fictitious volume force
Xν = −Eµναβ/εαβ;µ . (8.13)

98 Chapter 8 Defects in the Spacetime Continuum
This can be shown from (3.7), viz.
Tµν ;µ = −Xν ,
making use of (2.6) and (8.8) into the above equation, to obtain
2µ0εµν
;µ + 2µ0/εµν
;µ + λ0ε;ν + λ0/ε
;ν = −Xν . (8.14)
Since the elastic strain tensor εµν has a volume force of zero, we obtain
Xν = −(2µ0/ε
µν;µ + λ0/ε
;ν). (8.15)
However, it should be noted that the volume force for a defect couldstill be zero if the situation is such that the incompatibility tensor iszero. In the absence of defects, /εµν = 0, the incompatibility tensor iszero, and the volume force is also zero.
In chapter 7, we derived a non-zero quantum mechanical volumeforce which indicates the presence of defects in the spacetime continuumat the quantum level.
§8.5 Defects dynamics
In section §3.3, we showed that the dynamics of the spacetime contin-uum is described by the dynamic equation (3.18), which includes theaccelerations from the applied forces, viz.
µ0∇2uν + (µ0 + λ0)ε;ν = −Xν .
In this analysis, we consider the simpler problem of defects in anisotropic continuum under equilibrium conditions with no volume force.As seen in §6.4, the field of a defect in the spacetime continuum canalways be simulated by a fictitious volume force if necessary. Then(3.18) becomes
µ0∇2uν + (µ0 + λ0)ε;ν = 0, (8.16)
where ∇2 is the four-dimensional operator and the semi-colon (;) rep-resents covariant differentiation.
Separating uν into its longitudinal (irrotational) component uν‖ and
its transverse (solenoidal) component uν⊥ using the Helmholtz theoremin four dimensions [283] according to
uν = uν‖ + uν⊥, (8.17)

§8.5 Defects dynamics 99
(8.16) can be separated into a screw dislocation displacement (trans-verse) equation
µ0∇2uν⊥ = 0 (8.18)
and an edge dislocation displacement (longitudinal) equation
∇2uν‖ = − µ0 + λ0
µ0ε;ν . (8.19)
The components of the energy-momentum stress tensor are givenby [193]:
T 00 = H
T 0j = sj
T i0 = gi
T ij = σij
(8.20)
where H is the total energy density, sj is the energy flux vector, gi is themomentum density vector, and σij is the Cauchy stress tensor which isthe ith component of force per unit area at xj .
From the stress tensor Tµν , we can calculate the strain tensor εµν
and then calculate the strain energy density of the dislocations. Asshown in §2.1, for a general anisotropic continuum in four dimensions,the spacetime continuum is approximated by a deformable linear elasticmedium that obeys Hooke’s law [104, see pp. 50–53]
Eµναβεαβ = Tµν (8.21)
where Eµναβ is the elastic moduli tensor. For an isotropic and homo-geneous medium, the elastic moduli tensor simplifies to [104]:
Eµναβ = λ0
(gµνgαβ
)+ µ0
(gµαgνβ + gµβgνα
). (8.22)
For the metric tensor gµν , we use the flat spacetime diagonal metricηµν with signature (+ – – –) as the spacetime continuum is locally flat atthe microscopic level. Substituting for (8.22) into (8.21) and expanding,

100 Chapter 8 Defects in the Spacetime Continuum
we obtain
T 00 = (λ0 + 2µ0) ε00 − λ0 ε11 − λ0 ε
22 − λ0 ε33
T 11 = −λ0 ε00 + (λ0 + 2µ0) ε11 + λ0 ε
22 + λ0 ε33
T 22 = −λ0 ε00 + λ0 ε
11 + (λ0 + 2µ0) ε22 + λ0 ε33
T 33 = −λ0 ε00 + λ0 ε
11 + λ0 ε22 + (λ0 + 2µ0) ε33
Tµν = 2µ0 εµν , µ 6= ν.
(8.23)
In terms of the stress tensor, the inverse of (8.23) is given by
ε00 =1
4µ0(2λ0 + µ0)
[(3λ0 + 2µ0)T 00+
+ λ0 (T 11 + T 22 + T 33)]
ε11 =1
4µ0(2λ0 + µ0)
[(3λ0 + 2µ0)T 11+
+ λ0 (T 00 − T 22 − T 33)]
ε22 =1
4µ0(2λ0 + µ0)
[(3λ0 + 2µ0)T 22+
+ λ0 (T 00 − T 11 − T 33)]
ε33 =1
4µ0(2λ0 + µ0)
[(3λ0 + 2µ0)T 33+
+ λ0 (T 00 − T 11 − T 22)]
εµν =1
2µ0Tµν , µ 6= ν.
(8.24)
where T ij = σij . We calculate ε = εαα from the values of (8.24). Usingηµν , (2.3) and Tαα = ρc2 from (2.22), we obtain (2.24) as required.This confirms the validity of the strain tensor in terms of the energy-momentum stress tensor as given by (8.24).
Eshelby [93–95] introduced an elastic field energy-momentum tensorfor continuous media to deal with cases where defects (such as dis-locations) lead to changes in configuration. The displacements uν are

§8.5 Defects dynamics 101
considered to correspond to a field defined at points xµ of the spacetimecontinuum. This tensor was first derived by Morse and Feshback [196]for an isotropic elastic medium, using dyadics. The energy flux vectorsj and the field momentum density vector gi are then given by [93,196]:
sj = −uk σkj
gi = ρ0 uk,i uk
bij = Lδij − uk,i σkj
(8.25)
where ρ0 is the density of the medium, in this case the spacetime con-tinuum, L is the Lagrangian equal to K − W where W is the strainenergy density and K is the kinetic energy density (H = K +W ), andbij is known as the Eshelby stress tensor [173, see p. 27]. If the energy-momentum stress tensor is symmetric, then gi = si. In this paper, weconsider the case where there are no changes in configuration, and usethe energy-momentum stress tensor given by (8.20) and (8.23).

102

Chapter 9
Dislocations in the Spacetime Continuum
§9.1 Analysis of spacetime continuum dislocations
In this chapter, we investigate dislocations in the spacetime continuumin the context of STCED. The approach followed till now by investiga-tors has been to use Einstein-Cartan differential geometry, with dislo-cations (translational deformations) impacting curvature and disclina-tions (rotational deformations) impacting torsion. The dislocation itselfis modelled via the line element ds2 [219].
In this chapter, we investigate spacetime continuum dislocations us-ing the underlying displacements uν and the energy-momentum stresstensor. We thus work from the RHS of the general relativistic equa-tion (the stress tensor side) rather than the LHS (the geometric tensorside). It should be noted that the general relativistic equation used canbe the standard Einstein equation or a suitably modified version, as inEinstein-Cartan or Teleparallel formulations.
In this section, we review the basic physical characteristics and dy-namics of dislocations in the spacetime continuum. The energy-momen-tum stress tensor was considered in section §8.5. A detailed review ofstationary and moving screw and edge dislocations follows in sections§9.2 and §9.3, along with their strain energy density as calculated fromSTCED. The Volterra and deWit treatment of discrete dislocation linesis then covered in sections §9.4 and §9.5, and we close with curved dis-locations in sections §9.6. The relation of spacetime continuum defectsto quantum physics is covered starting in chapter 14.
A dislocation is characterized by its dislocation-displacement vector,known as the Burgers vector, bµ in a four-dimensional continuum, de-fined positive in the direction of a vector ξµ tangent to the dislocationline in the spacetime continuum [123, see pp.17–24].
A Burgers circuit encloses the dislocation. A similar reference cir-cuit can be drawn to enclose a region free of dislocation (see Fig. 9.1).The Burgers vector is the vector required to make the Burgers circuitequivalent to the reference circuit (see Fig. 9.2). It is a measure of thedisplacement between the initial and final points of the circuit due tothe dislocation.
It is important to note that there are two conventions used to definethe Burgers vector. In this chapter, we use the convention used by

104 Chapter 9 Dislocations in the Spacetime Continuum
Figure 9.1: A reference circuit in a region free of dislocation, S: start,F: finish
66--
??S
F
Hirth [123] referred to as the local Burgers vector. The local Burgersvector is equivalently given by the line integral
bµ =
∮C
∂uµ
∂sds (9.1)
taken in a right-handed sense relative to ξµ, where uµ is the displace-ment vector.
A dislocation is thus characterized by a line direction ξµ and a Burg-ers vector bµ. There are two types of dislocations: an edge dislocationfor which bµξµ = 0 and a screw dislocation which can be right-handedfor which bµξµ = b, or left-handed for which bµξµ = −b, where b isthe magnitude of the Burgers vector. Arbitrary mixed dislocations canbe decomposed into a screw component, along vector ξµ, and an edgecomponent, perpendicular to vector ξµ.
The edge dislocation was first proposed by Orowan [205], Polanyi[215] and Taylor [256] in 1934, while the screw dislocation was proposedby Burgers [28] in 1939. In this chapter, we extend the concept ofdislocations to the elastodynamics of the spacetime continuum. Edgedislocations correspond to dilatations (longitudinal displacements) andhence have an associated rest-mass energy, while screw dislocations cor-

§9.2 Screw dislocations 105
Figure 9.2: A dislocation showing the Burgers vector bµ, direction vectorξµ which points into the paper and the Burgers circuit, S: start, F: finish
EEEEEEEEE
EEEEEEEEE
EEEEEEEEE
EEEEEEEEE
6-
SF
bµ
eξµ
respond to distortions (transverse displacements) and are massless [187].
§9.2 Screw dislocations
We first consider the simplest dislocation, the discrete screw dislocation,both in the stationary and the moving case.
§9.2.1 Stationary screw dislocation
We consider a stationary screw dislocation in the spacetime contin-uum, with cylindrical polar coordinates (r, θ, z), with the dislocationline along the z-axis (see Fig. ??). Then the Burgers vector is alongthe z-axis and is given by br = bθ = 0, bz = b, the magnitude of theBurgers vector. The only non-zero component of the deformations isgiven by [123, see pp. 60–61] [153, see p. 51]
uz =b
2πθ =
b
2πtan−1 y
x. (9.2)
This solution satisfies (8.18), the screw dislocation displacement eq-uation seen previously in section §8.5.

106 Chapter 9 Dislocations in the Spacetime Continuum
Figure 9.3: A stationary screw dislocation in cartesian (x, y, z) andcylindrical polar (r, θ, z) coordinates.
Similarly, the only non-zero components of the stress and straintensors are given by
σθz =b
2π
µ0
r
εθz =b
4π
1
r
(9.3)
respectively.The rotation tensor is calculated from (3.3), viz.
ωµν = 12 (uµ;ν − uν;µ) .
Substituting for the displacements from (9.2), we find that the onlynon-zero component of the rotation tensor is
ωzθ = −ωθz =b
4π. (9.4)
In terms of the rotation vector, using (10.1) viz.
ωα =1
2εαµν ωµν ,

§9.2 Screw dislocations 107
we obtain
ωr = − b
4π. (9.5)
Using (14.3), the rotation vector can also be written as
ωr = − b2, (9.6)
where, as we will see in section §14.2, b = b/2π. For the stationary screwdislocation of (9.2), we thus obtain a constant, left-handed rotationvector. Note that if we consider a stationary screw dislocation with anegative Burgers vector −b (b > 0),
uz = − b
2πθ = − b
2πtan−1 y
x, (9.7)
we obtain a constant, right-handed rotation vector
ωr =b
4π. (9.8)
It should be noted that even though (9.6) is similar to ~/2, the units ofb are [m] while those of ~ are [J ·s], and are thus not the same quantities.
§9.2.2 Moving screw dislocation
We now consider the previous screw dislocation, moving along the x-axis, parallel to the dislocation, at a constant speed vx = v. Equation(8.16) then simplifies to the wave equation for massless transverse shearwaves for the displacements uz along the z-axis, with speed ct = c givenby (3.12), where ct is the speed of the transverse waves correspondingto c the speed of light.
If coordinate system (x′, y′, z′, t′) is attached to the uniformly mov-ing screw dislocation, then the transformation between the stationaryand the moving screw dislocation is given by [123]
x′ =x− vt
(1− v2/c2)1/2
y′ = y
z′ = z
t′ =t− vx/c2
(1− v2/c2)1/2.
(9.9)

108 Chapter 9 Dislocations in the Spacetime Continuum
which is the special relativistic transformation.The only non-zero component of the deformation in cartesian coor-
dinates is given by [123, see pp. 184–185]
uz =b
2πtan−1 αy
x− vt, (9.10)
where
α =
√1− v2
c2. (9.11)
The Lorentz gamma-factor is given by
γ =1
α=
(1− v2
c2
)− 12
. (9.12)
This solution also satisfies the screw dislocation displacement equation(8.18). It simplifies to the case of the stationary screw dislocation whenthe speed v = 0.
Using (9.9) into (9.10) to transform to the moving coordinate system(x′, y′, z′, t′), we obtain
uz′ =b
2πtan−1 y
′
x′, (9.13)
and the rotation vector is given by
ωr′ = − b
4π(9.14)
in the moving coordinate system (x′, y′, z′, t′), the same as (9.5) in thestationary coordinate system.
The only non-zero components of the stress tensor in cartesian co-ordinates are given by [123]
σxz = −bµ0
2π
αy
(x− vt)2 + α2y2
σyz =bµ0
2π
α(x− vt)(x− vt)2 + α2y2
.
(9.15)
The only non-zero components of the strain tensor in cartesian coordi-nates are derived from εµν = 1
2 (uµ;ν + uν;µ) [180, see Eq.(41)]:
εxz = − b
4π
αy
(x− vt)2 + α2y2
εyz =b
4π
α(x− vt)(x− vt)2 + α2y2
,
(9.16)

§9.2 Screw dislocations 109
in an isotropic continuum.Non-zero components involving time are given by
εtz = εzt =1
2
(∂uz∂(ct)
+∂ut∂z
)εtz =
b
4π
v
c
αy
(x− vt)2 + α2y2
(9.17)
where ut = 0 has been used. This assumes that the screw dislocation isfully formed and moving with velocity v as described. Using (8.23), thenon-zero stress components involving time are given by
σtz = σzt =bµ0
2π
v
c
αy
(x− vt)2 + α2y2. (9.18)
Screw dislocations are thus found to be Lorentz invariant.
§9.2.3 Screw dislocation strain energy density
We consider the stationary screw dislocation in the spacetime continuumof section §9.2.1, with cylindrical polar coordinates (r, θ, z), with thedislocation line along the z-axis and the Burgers vector along the z-axisbz = b.
Then the strain energy density of the screw dislocation is given bythe transverse distortion energy density [180, see Eq. (74)]
E⊥ = µ0 eαβeαβ (9.19)
where from [180, see Eq. (33)],
eαβ = εαβ − esgαβ (9.20)
where es = 14 ε
αα is the dilatation which for a screw dislocation is equal
to 0. The screw dislocation is thus massless and E‖ = 0.The non-zero components of the strain tensor are as defined in (9.3).
HenceE⊥ = µ0
(εθz
2 + εzθ2). (9.21)
Substituting from (9.3),
E⊥ =µ0 b
2
8π2
1
r2= E . (9.22)
We now consider the more general case of the moving screw dis-location in the spacetime continuum of section §9.2.2, with cartesian

110 Chapter 9 Dislocations in the Spacetime Continuum
coordinates (x, y, z). The non-zero components of the strain tensor areas defined in (9.16) and (9.17). Substituting in (9.19), the equationbecomes [180, see Eqs.(114–115)]
E⊥ = 2µ0
(−εtz2 + εxz
2 + εyz2). (9.23)
Substituting from (9.16) and (9.17) into (9.23), the screw dislocationstrain energy density becomes
E⊥ =µ0 b
2
8π2
α2
(x− vt)2 + α2y2= E . (9.24)
This equation simplifies to (9.22) in the case where v = 0, as expected.In addition, the energy density (which is quadratic in energy as per [180,see Eq.(76)]) is multiplied by the special relativistic α factor.
§9.2.4 Screw dislocation current and charge density
The current density four-vector is calculated from (4.10), viz.
jν =ϕ0
µ0
2µ0 + λ0
2µ0ε;ν =
ϕ0
2µ0 α0ε;ν
and the charge density from (4.14), viz.
% =1
2ϕ0ε0c
2µ0 + λ0
2µ0
√ε;νε;ν =
ϕ0ε0c
4α0
√ε;νε;ν
where ϕ0 is the spacetime continuum electromagnetic shearing potentialconstant and
α0 =µ0
2µ0 + λ0.
For the screw dislocation,
jν = 0 (9.25)
% = 0 (9.26)
given that ε = 0.
§9.3 Edge dislocations
We next consider discrete edge dislocations, both in the stationary andthe moving case.

§9.3 Edge dislocations 111
Figure 9.4: A stationary edge dislocation in cartesian (x, y, z) and cylin-drical polar (r, θ, z) coordinates.
§9.3.1 Stationary edge dislocation
We consider a stationary edge dislocation in the spacetime continuum incartesian coordinates (x, y, z), with the dislocation line along the z-axisand the Burgers vector bx = b, by = bz = 0 (see Fig. ??). Then the non-zero components of the deformations are given in cartesian coordinatesby [123, see p. 78]
ux =b
2π
(tan−1 y
x+
µ0 + λ0
2µ0 + λ0
xy
x2 + y2
)
uy = − b
2π
(1
2
µ0
2µ0 + λ0ln(x2 + y2)+
+1
2
µ0 + λ0
2µ0 + λ0
x2 − y2
x2 + y2
).
(9.27)
This solution results in a non-zero R.H.S. of the edge dislocation dis-placement equation (8.19) as required. Equation (8.19) can be evaluatedto give a value of ε in agreement with the results of section §9.3.4 asshown in that section.
The rotation tensor is calculated from (3.3). Substituting for thedisplacements from (9.27), we find that the only non-zero component of

112 Chapter 9 Dislocations in the Spacetime Continuum
the rotation tensor is
ωxy = −ωyx =b
2π
x
x2 + y2. (9.28)
In terms of the rotation vector, using (10.1), we obtain
ωz =b
π
x
x2 + y2. (9.29)
In cylindrical polar coordinates, the rotation vector can also be writtenas
ωz =b
π
cos θ
r. (9.30)
For a stationary edge dislocation, we thus obtain a right-handed rotationvector that decreases as 1/r and varies sinusoidally with θ.
The cylindrical polar coordinate description of the edge dislocationis more complex than the cartesian coordinate description. We thus usecartesian coordinates in the following sections, transforming to polarcoordinate expressions as warranted. The non-zero components of thestress tensor in cartesian coordinates are given by [123, see p. 76]
σxx = −bµ0
π
µ0 + λ0
2µ0 + λ0
y(3x2 + y2)
(x2 + y2)2
σyy =bµ0
π
µ0 + λ0
2µ0 + λ0
y(x2 − y2)
(x2 + y2)2
σzz =1
2
λ0
µ0 + λ0(σxx + σyy)
= −bµ0
π
λ0
2µ0 + λ0
y
x2 + y2
σxy =bµ0
π
µ0 + λ0
2µ0 + λ0
x(x2 − y2)
(x2 + y2)2.
(9.31)
The non-zero components of the strain tensor in cartesian coordi-

§9.3 Edge dislocations 113
nates are derived from εµν = 12 (uµ;ν + uν;µ) [180, see Eq.(41)]:
εxx = − b
2π
y
x2 + y2
(1 +
µ0 + λ0
2µ0 + λ0
x2 − y2
x2 + y2
)= − by
2π
(3µ0 + 2λ0)x2 + µ0y2
(2µ0 + λ0) (x2 + y2)2
εyy = − b
2π
µ0
2µ0 + λ0
y
x2 + y2
(1− µ0 + λ0
µ0
2x2
x2 + y2
)=by
2π
(µ0 + 2λ0)x2 − µ0y2
(2µ0 + λ0) (x2 + y2)2
(9.32)
εxy =b
2π
µ0 + λ0
2µ0 + λ0
x(x2 − y2)
(x2 + y2)2
in an isotropic continuum.
§9.3.2 Moving edge dislocation
We now consider the previous edge dislocation, moving along the x-axis, parallel to the z-axis, along the slip plane x−z, at a constantspeed vx = v. The solutions of (8.16) for the moving edge dislocationthen include both longitudinal and transverse components. The onlynon-zero components of the deformations in cartesian coordinates aregiven by [273, see pp. 39–40] [96, see pp. 218–219]
ux =bc2
πv2
(tan−1 αly
x− vt− α2
2 tan−1 αy
x− vt
)uy =
bc2
2πv2
(αl ln
[(x− vt)2 + α2
l y2]−
− α22
αln[(x− vt)2 + α2y2
]),
(9.33)
where
α2 =
√1− v2
2c2, (9.34)
αl =
√1− v2
c2l(9.35)

114 Chapter 9 Dislocations in the Spacetime Continuum
and cl is the speed of longitudinal deformations given by
cl =
√2µ0 + λ0
ρ0. (9.36)
Similarly to (9.12), we have
γ2 =1
α2=
(1− v2
2c2
)− 12
γl =1
αl=
(1− v2
c2l
)− 12
.
(9.37)
This solution again results in a non-zero R.H.S. of the edge dislocationdisplacement equation (8.19) as required, and (8.19) can be evaluatedto give a value of ε as in section §9.3.4. This solution simplifies to thecase of the stationary edge dislocation when the speed v = 0.
The rotation tensor is calculated from (3.3). Substituting for the dis-placements from (9.33), we find that the only non-zero space componentof the rotation tensor is
ωxy = −ωyx =b
2π
α22
α
x− vt(x− vt)2 + (αy)2
. (9.38)
In terms of the rotation vector, using (10.1), we obtain
ωz =b
π
α22
α
x− vt(x− vt)2 + (αy)2
. (9.39)
From (9.11) and (9.34), using a Taylor expansion for α−1, we have
α22
α' 1− v4
4c4→ 1 (9.40)
and hence
ωz →b
π
x− vt(x− vt)2 + (αy)2
. (9.41)
This expression is the same as that of the stationary edge dislocationof (9.29) in the case where v → 0. For a moving edge dislocation, wethus find that the z-component of the rotation vector includes only thetransverse terms of the dislocation, with the longitudinal terms can-celling out.

§9.3 Edge dislocations 115
The non-zero time components of the rotation tensor are also ob-tained from (3.3) and (9.33):
ωxt =1
2
(1
c
∂ux∂t− ∂ut∂x
)= −ωtx
=b
2π
c
v
(αly
(x− vt)2 + (αly)2− α2
2
αy
(x− vt)2 + (αy)2
)ωyt = − b
2π
c
v
(αl(x− vt)
(x− vt)2 + (αly)2− α2
2
α2
α(x− vt)(x− vt)2 + (αy)2
).
(9.42)
The corresponding space rotation vector components are then given by
ωx = − bπ
c
v
(αl(x− vt)
(x− vt)2 + (αly)2− α2
2
α
x− vt(x− vt)2 + (αy)2
)ωy = − b
π
c
v
(αly
(x− vt)2 + (αly)2− α2
2
αy
(x− vt)2 + (αy)2
).
(9.43)
The x- and the y-components of the rotation vector include both trans-verse and longitudinal terms of the dislocation.
Finally, the time component of the rotation vector is given by
ωt = εtxy ωxy + εtyx ω
yx
= ωxy − ωyx = 2ωxy
=b
π
α22
α
x− vt(x− vt)2 + (αy)2
.
(9.44)
The non-zero components of the stress tensor in cartesian coordi-nates are given by [123, see pp. 189–190] [273, see pp. 39–40]
σxx =bc2y
πv2
(λ0α
3l − (2µ0 + λ0)αl
(x− vt)2 + α2l y
2+
2µ0α22α
(x− vt)2 + α2y2
)
σyy =bc2y
πv2
((2µ0 + λ0)α3
l − λ0αl(x− vt)2 + α2
l y2− 2µ0α
22α
(x− vt)2 + α2y2
) (9.45)

116 Chapter 9 Dislocations in the Spacetime Continuum
σzz =1
2
λ0
µ0 + λ0(σxx + σyy)
=λ0b
π
c2
c2l
−αly(x− vt)2 + α2
l y2
=b
π
λ0µ0
2µ0 + λ0
−αly(x− vt)2 + α2
l y2
σxy =µ0bc
2
πv2
(2αl(x− vt)
(x− vt)2 + α2l y
2− α2
2(α+ 1/α)(x− vt)(x− vt)2 + α2y2
).
It is important to note that for a screw dislocation, the stress on theplane x− vt = 0 becomes infinite at v = c. This sets an upper limit onthe speed of screw dislocations in the spacetime continuum, and providesan explanation for the speed of light limit. This upper limit also appliesto edge dislocations, as the shear stress becomes infinite everywhere atv = c, even though the speed of longitudinal deformations cl is greaterthan that of transverse deformations c [123, see p. 191] [273, see p. 40].
The non-zero components of the strain tensor in cartesian coordi-nates are derived from εµν = 1
2 (uµ;ν + uν;µ) [180, see Eq.(41)]:
εxx =bc2y
πv2
(−αl
(x− vt)2 + (αly)2+
α22α
(x− vt)2 + (αy)2
)
εyy =bc2y
πv2
(α3l
(x− vt)2 + (αly)2− α2
2α
(x− vt)2 + (αy)2
)
εxy =bc2
2πv2
(2αl(x− vt)
(x− vt)2 + (αly)2− α2
2(α+ 1/α)(x− vt)(x− vt)2 + (αy)2
) (9.46)
in an isotropic continuum.Non-zero components involving time are given by
εtx = εxt =1
2
(∂ux∂(ct)
+∂ut∂x
)εty = εyt =
1
2
(∂uy∂(ct)
+∂ut∂y
)
εtx =b
2π
c
v
(αly
(x− vt)2 + α2l y
2− α2
2
αy
(x− vt)2 + α2y2
)
εty = − b
2π
c
v
(αl(x− vt)
(x− vt)2 + α2l y
2− α2
2
α2
α(x− vt)(x− vt)2 + α2y2
)(9.47)

§9.3 Edge dislocations 117
where ut = 0 has been used. This assumes that the edge dislocation isfully formed and moving with velocity v as described. Using (8.23), thenon-zero stress components involving time are given by
σtx =bµ0
π
c
v
(αly
(x− vt)2 + α2l y
2− α2
2
αy
(x− vt)2 + α2y2
)
σty = −bµ0
π
c
v
(αl(x− vt)
(x− vt)2 + α2l y
2− α2
2
α2
α(x− vt)(x− vt)2 + α2y2
).
(9.48)
§9.3.3 Edge dislocation strain energy density
As we have seen in section §9.2.3, the screw dislocation is massless asε = 0 and hence E‖ = 0 for the screw dislocation: it is a pure distortion,with no dilatation. In this section, we evaluate the strain energy densityof the edge dislocation.
As seen in [180, see section 8.1], the strain energy density of thespacetime continuum is separated into two terms: the first one expressesthe dilatation energy density (the mass longitudinal term) while the sec-ond one expresses the distortion energy density (the massless transverseterm):
E = E‖ + E⊥ (9.49)
where
E‖ =1
2κ0ε
2 ≡ 1
32κ0
(ρc2)2 ≡ 1
2κ0t2s (9.50)
where ε is the volume dilatation and ρ is the mass energy density of theedge dislocation, and
E⊥ = µ0eαβeαβ ≡
1
4µ0tαβtαβ (9.51)
where from [180, see Eq. (36)] the energy-momentum stress tensor Tαβ isdecomposed into a stress deviation tensor tαβ and a scalar ts, accordingto
tαβ = Tαβ − tsgαβ (9.52)
where ts = 14 T
αα. Then the dilatation strain energy density of the
edge dislocation is given by the (massive) longitudinal dilatation energydensity (9.50) and the distortion (massless) strain energy density of theedge dislocation is given by the transverse distortion energy density(9.51).

118 Chapter 9 Dislocations in the Spacetime Continuum
§9.3.4 Stationary edge dislocation strain energy density
We first consider the case of the stationary edge dislocation of section§9.3.1. The volume dilatation ε for the stationary edge dislocation isgiven by
ε = εαα = εxx + εyy (9.53)
where the non-zero diagonal elements of the strain tensor are obtainedfrom (9.32). Substituting for εxx and εyy from (9.32), we obtain
ε = − bπ
µ0
2µ0 + λ0
y
x2 + y2. (9.54)
In cylindrical polar coordinates, (9.54) is expressed as
ε = − bπ
µ0
2µ0 + λ0
sin θ
r. (9.55)
We can disregard the negative sign in (9.54) and (9.55) as it can beeliminated by using the FS/RH convention instead of the SF/RH con-vention for the Burgers vector [123, see p. 22]).
As mentioned in section §9.3.1, the volume dilatation ε can be cal-culated from the edge dislocation displacement (longitudinal) equation(8.19), viz.
∇2uν‖ = − µ0 + λ0
µ0ε;ν .
For the x-component, this equation gives
∇2ux =∂2ux∂x2
+∂2ux∂y2
= − µ0 + λ0
µ0ε,x. (9.56)
Substituting for ux from (9.27), we obtain
∇2ux = −2b
π
µ0 + λ0
2µ0 + λ0
xy
(x2 + y2)2= − µ0 + λ0
µ0ε,x. (9.57)
Hence
ε,x =2b
π
µ0
2µ0 + λ0
xy
(x2 + y2)2(9.58)
and
ε =2b
π
µ0
2µ0 + λ0
∫xy
(x2 + y2)2dx. (9.59)

§9.3 Edge dislocations 119
Evaluating the integral [281], we obtain
ε = − bπ
µ0
2µ0 + λ0
y
x2 + y2(9.60)
in agreement with (9.54).Similarly for the y-component, substituting for uy from (9.27), the
equation
∇2uy =∂2uy∂x2
+∂2uy∂y2
= − µ0 + λ0
µ0ε,y (9.61)
gives
ε,y = − bπ
µ0
2µ0 + λ0
x2 − y2
(x2 + y2)2. (9.62)
Evaluating the integral [281]
ε = − bπ
µ0
2µ0 + λ0
∫x2 − y2
(x2 + y2)2dy, (9.63)
we obtain
ε = − bπ
µ0
2µ0 + λ0
y
x2 + y2(9.64)
again in agreement with (9.54).The mass energy density is calculated from (2.24)
ρc2 = 4κ0 ε = 2(2λ0 + µ0) ε (9.65)
where (2.3) has been used. Substituting for ε from (9.54), the massenergy density of the stationary edge dislocation is given by
ρc2 =4b
π
κ0µ0
2µ0 + λ0
y
x2 + y2. (9.66)
In cylindrical polar coordinates, (9.66) is expressed as
ρc2 =4b
π
κ0µ0
2µ0 + λ0
sin θ
r. (9.67)
Using (9.54) in (9.50), the stationary edge dislocation longitudinaldilatation strain energy density is then given by
E‖ =b2
2π2
κ0 µ20
(2µ0 + λ0)2
y2
(x2 + y2)2. (9.68)

120 Chapter 9 Dislocations in the Spacetime Continuum
In cylindrical polar coordinates, (9.68) is expressed as
E‖ =b2
2π2
κ0 µ20
(2µ0 + λ0)2
sin2 θ
r2. (9.69)
The distortion strain energy density is calculated from (9.51), viz.
E⊥ = µ0eαβeαβ .
As seen previously in (9.20),
eαβ = εαβ − esgαβ (9.70)
where es = 14 ε is the volume dilatation calculated in (9.54). Then
eαβeαβ =(εαβ − 1
4 εgαβ) (εαβ − 1
4 εgαβ)
(9.71)
and the distortion strain energy density equation becomes
E⊥ = µ0
(εαβεαβ − 1
4 εgαβεαβ − 1
4 εgαβεαβ + 1
16 ε2gαβgαβ
)= µ0
(εαβεαβ − 1
4 ε2 − 1
4 ε2 + 1
4 ε2) (9.72)
for gαβ = ηαβ . Hence
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (9.73)
This expression is expanded using the non-zero elements of the straintensor (9.32) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 − 14 ε
2)
(9.74)
where 2εxy2 = εxy
2 + εyx2. Substituting from (9.32) and (9.54) in the
above, simplifying the β20 terms, followed by the other terms, completing
the squares for r2 and performing polynomial division, we obtain
E⊥ =µ0 b
2
4π2
2 β20 x
2 + α20 y
2
(x2 + y2)2(9.75)
where
α0 =µ0
2µ0 + λ0(9.76)
β0 =µ0 + λ0
2µ0 + λ0. (9.77)

§9.3 Edge dislocations 121
Substituting for α20 and β2
0 , (9.75) becomes
E⊥ =b2
4π2
µ0
(2µ0 + λ0)2
2(µ0 + λ0)2 x2 + µ20 y
2
(x2 + y2)2. (9.78)
In cylindrical polar coordinates, (9.78) is expressed as
E⊥ =b2
4π2
µ0
(2µ0 + λ0)2
2(µ0 + λ0)2 cos2 θ + µ20 sin2 θ
r2. (9.79)
This equation can also be written as
E⊥ =µ0 b
2
4π2
(α2
0
sin2 θ
r2+ 2β2
0
cos2 θ
r2
). (9.80)
§9.3.5 Moving edge dislocation strain energy density
We next consider the general case of the moving edge dislocation inthe spacetime continuum of section §9.3.2, with cartesian coordinates(x, y, z). We first evaluate the volume dilatation ε for the moving edgedislocation. The volume dilatation is given by
ε = εαα = εxx + εyy (9.81)
where the non-zero diagonal elements of the strain tensor are obtainedfrom (9.46). Substituting for εxx and εyy from (9.46) in (9.81), we noticethat the transverse terms cancel out, and we are left with the followinglongitudinal term:
ε =bc2y
πv2
α3l − αl
(x− vt)2 + α2l y
2(9.82)
This equation can be further reduced to
ε =bc2
πv2
v2
cl2αly
(x− vt)2 + α2l y
2(9.83)
and finally, using c2/cl2 = µ0/(2µ0 + λ0) (see (3.12) and (9.36)),
ε(xi, t) =b
2π
2µ0
2µ0 + λ0
αly
(x− vt)2 + α2l y
2. (9.84)
As we have seen previously, the mass energy density is calculatedfrom (9.65)
ρc2 = 4κ0 ε = 2(2λ0 + µ0) ε. (9.85)

122 Chapter 9 Dislocations in the Spacetime Continuum
Substituting for ε from (9.84), the mass energy density of an edge dis-location is given by
ρ(xi, t) c2 =
b
2π
8κ0µ0
2µ0 + λ0
αly
(x− vt)2 + α2l y
2. (9.86)
Using (9.84) in (9.50), the edge dislocation longitudinal dilatation strainenergy density is then given by
E‖ =1
2κ0
(b
2π
2µ0
2µ0 + λ0
αly
(x− vt)2 + α2l y
2
)2
. (9.87)
The distortion strain energy density is calculated from (9.73) as de-rived from (9.51). The expression is expanded using the non-zero ele-ments of the strain tensor (9.46) and (9.47) to obtain [180, see Eqs.(114–115)])
E⊥ = µ0
(εxx
2 + εyy2 − 2εtx
2 − 2εty2 + 2εxy
2 − 14 ε
2)
(9.88)
Substituting from (9.46), (9.47) and (9.82) in the above and simplifying,we obtain
E⊥ =µ0 b
2
π2
c4
v4[α4
2
2α2
((1 + α2)2 − v2/c2
)(x− vt)2 + 2α4(1 + α2
2) y2
r∗4−
− 2αl α22 α
(1 + α2
2/α2)
(x− vt)2 +(α2
2 + α2l
)y2
r∗2 r∗2l+
+α2l
(1 + α22) (x− vt)2 +
(α2
2 + α4l − 1
4 v4/c4l
)y2
r∗4l
](9.89)
where
r∗2 = (x− vt)2 + α2y2 (9.90)
r∗2l = (x− vt)2 + α2l y
2 . (9.91)
We consider the above equations for the moving edge dislocation inthe limit as v → 0. Then the terms
αy
(x− vt)2 + α2y2→ sin θ
r(9.92)

§9.3 Edge dislocations 123
andx− vt
(x− vt)2 + α2y2→ cos θ
r(9.93)
in cylindrical polar coordinates. Similarly for the same terms with αlinstead of α.
The volume dilatation obtained from (9.84) is then given in cylin-drical polar coordinates (r, θ, z) by
ε→ b
2π
2µ0
2µ0 + λ0
sin θ
r. (9.94)
The mass energy density is obtained from (9.86) to give
ρc2 → b
2π
8κ0µ0
2µ0 + λ0
sin θ
r. (9.95)
From (9.87), the edge dislocation dilatation strain energy density is thengiven by
E‖ →b2
2π2
κ0 µ20
(2µ0 + λ0)2
sin2 θ
r2. (9.96)
These equations are in agreement with (9.55), (9.67) and (9.69) respec-tively.
The edge dislocation distortion strain energy density in the limit asv → 0 is obtained by using (9.92) and (9.93) in (9.46), (9.47) and (9.82)to compute (9.88). For example, εxx becomes
εxx =b c2
πv2
(−1 + α2
2
) sin θ
r. (9.97)
Using these limiting values in (9.46) and (9.47), and c2/cl2 = µ0/(2µ0 +
λ0) (see (3.12) and (9.36)) in the expression for ε in (9.94), equation(9.88) then becomes:
E⊥ →µ0 b
2
π2
c4
v4
[− 1
4
v4
cl4sin2 θ
r2+(−1 + α2
2
)2 sin2 θ
r2+
+(α2l − α2
2
)2 sin2 θ
r2+
(2αl − α2
2
(α+
1
α
))2cos2 θ
r2−
− v2
c2(1− α2
2
)2 sin2 θ
r2− v2
c2
(−αl +
α22
α
)2cos2 θ
r2
].
(9.98)

124 Chapter 9 Dislocations in the Spacetime Continuum
Using the definitions of α2, α22 and α2
l from (9.11), (9.34) and (9.35)respectively, using the first term of the Taylor expansion for α and αlas v → 0, and neglecting the terms multiplied by −v2/c2 in (9.98) asthey are of order v6/c6, (9.98) becomes
E⊥ →µ0 b
2
π2
c4
v4
[(−1
4
v4
cl4+
v4
4c4+
(−v
2
c2l+
v2
2c2
)2)
sin2 θ
r2+
+4
(1− v2
2c2l− 1 +
v2
2c2
)2cos2 θ
r2
].
(9.99)Squaring and simplifying, we obtain
E⊥ →µ0 b
2
π2
c4
v4
[(3
4
v4
cl4− v4
c2l c2
+v4
2c4
)sin2 θ
r2+
+
(v4
cl4− 2
v4
c2l c2
+v4
c4
)cos2 θ
r2
] (9.100)
and further
E⊥ →µ0 b
2
2π2
[(1− 2
c2
c2l+
3
2
c4
cl4
)sin2 θ
r2+
+ 2
(1− 2
c2
c2l+c4
cl4
)cos2 θ
r2
].
(9.101)
Using c2/cl2 = µ0/(2µ0 + λ0) (see (3.12) and (9.36)), (9.101) becomes
E⊥ →µ0 b
2
2π2
[(1− 2 α0 +
3
2α2
0
)sin2 θ
r2+
+ 2(1− 2α0 + α2
0
) cos2 θ
r2
] (9.102)
where (1− 2α0 + α2
0
)= (1− α0)
2= β0 (9.103)
and α0 and β0 are as defined in (9.76). This equation represents theimpact of the time terms included in the calculation of E⊥ and the limitoperation v → 0 used in (9.89). Adding the terms of the sin2 θ/r2
coefficient by setting c ' cl in (9.100), we obtain the same term as in(9.80). Hence, comparing this expression with (9.80) for the stationarydislocation, we find that it has the same structure, with some additionaldetails resulting from the time limit operation.

§9.3 Edge dislocations 125
§9.3.6 Edge dislocation current and charge density
The current density four-vector is calculated from (4.10), viz.
jν =ϕ0
µ0
2µ0 + λ0
2µ0ε;ν =
ϕ0
2µ0α0ε;ν
and the charge density from (4.14), viz.
% =1
2ϕ0ε0c
2µ0 + λ0
2µ0
√ε;νε;ν =
ϕ0ε0c
4α0
√ε;νε;ν
where ϕ0 is the spacetime continuum electromagnetic shearing potentialconstant.
We first consider the stationary edge dislocation. Using the expres-sion for ε from (9.64), the non-zero components of the current densityare given by
jx =ϕ0b
πµ0
xy
r4=
ϕ0b
2πµ0
sin 2θ
r2
jy = −ϕ0b
πµ0
x2 − y2
r4= −ϕ0b
πµ0
cos 2θ
r2
(9.104)
where r2 = x2 + y2. The charge density is given by
% = ± 1
4πϕ0ε0c
b
r2. (9.105)
The sign depends on the problem under consideration.The charge is given by integrating % over the volume V :
Q =
∫V
% dV =
∫V
% r2dr sinϕdϕdθ (9.106)
in spherical polar coordinates. This becomes
Q = ± 1
4πϕ0ε0c b
∫ R
0
dr
∫ π
0
sinϕdϕ
∫ 2π
0
dθ (9.107)
where R is the “radius” of the deformation. Evaluating the integrals,we get
Q = ±ϕ0ε0c bR (9.108)
where the units are [C] as expected. Using (14.2),
Q = ±nϕ0ε0c b0R = ±n ϕ0b0µ0c
R (9.109)

126 Chapter 9 Dislocations in the Spacetime Continuum
where n is the number of elementary Burgers displacement b0.We next consider the moving edge dislocation. Using the expression
for ε from (9.84), the non-zero components of the current density aregiven by
jx = −ϕ0b
πµ0αl
(x− vt)y[(x− vt)2 + (αly)2]
2
jy =ϕ0b
2πµ0αl
(x− vt)2 − (αly)2
[(x− vt)2 + (αly)2]2
jct =ϕ0b
πµ0αlv
c
(x− vt)y[(x− vt)2 + (αly)2]
2 .
(9.110)
The charge density is given by
% = ± 1
4πϕ0ε0c αl
b
(x− vt)2 + (αly)2[1 + 2(1 + α0)
v2
c2(x− vt)2y2
[(x− vt)2 + (αly)2]2
] 12
(9.111)
and for v/c 1
% ' ± 1
4πϕ0ε0c αl
b
(x− vt)2 + (αly)2[1 + (1 + α0)
v2
c2(x− vt)2y2
[(x− vt)2 + (αly)2]2
].
(9.112)
which tends to
%→ ± 1
4πϕ0ε0c αl
b
(x− vt)2 + (αly)2(9.113)
and the results of the stationary edge dislocation as v → 0. The signagain depends on the problem under consideration.
§9.4 Volterra discrete dislocation line
In this section, we consider a discrete straight dislocation line runningalong the z-axis, composed of both screw and edge dislocations firstproposed by Volterra [269]. The dislocations include a screw dislocationwith displacement bz and edge dislocations with displacements bx andby. We will review the Volterra analysis in greater details in §10.2.

§9.4 Volterra discrete dislocation line 127
The displacements are given by
ux =1
2π(bxθ − by ln r)
uy =1
2π(byθ + bx ln r)
uz =1
2πbzθ
(9.114)
where
r2 = x2 + y2 (9.115)
θ = arctan(yx
). (9.116)
The components of the strain tensor in cartesian coordinates arederived from εµν = 1
2 (uµ;ν + uν;µ):
εxx = − bx2π
y
r2− by
2π
x
r2
εyy =bx2π
y
r2+by2π
x
r2
εzz = 0
εxy =bxπ
x
r2− byπ
y
r2
εyz =bz2π
x
r2
εxz = − bz2π
y
r2.
(9.117)
The volume dilatation ε for the discrete dislocation line is then givenby
ε = εαα = εxx + εyy + εzz . (9.118)
Substituting for εxx, εyy and εzz from (9.117), we obtain
ε = 0 . (9.119)
Hence the mass energy density is zero
ρc2 = 0 (9.120)

128 Chapter 9 Dislocations in the Spacetime Continuum
and the longitudinal dilatation strain energy density is also zero
E‖ = 0 . (9.121)
This indicates a problem with the Volterra displacements (9.114) as thevolume dilatation of an edge dislocation is not equal to zero.
The distortion strain energy density is calculated from (9.143)
E⊥ = µ0
(εαβεαβ − 1
4 ε2), (9.122)
using the non-zero elements of the strain tensor (9.117) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 + 2εyz2 + 2εxz
2). (9.123)
Substituting from (9.117) in the above, we obtain
E⊥ =µ0
4π2
(b2zr2
+ 2
(b2x + b2y
)r2
+ 2(bxx− byy)
2
r4
). (9.124)
The components of the stress tensor in cartesian coordinates aregiven by:
σxx = − µ0bxπ
y
r2− µ0by
π
x
r2
σyy =µ0bxπ
y
r2+µ0byπ
x
r2
σzz = 0
σxy =2µ0bxπ
x
r2− 2µ0by
π
y
r2
σyz =µ0bzπ
x
r2
σxz = − µ0bzπ
y
r2.
(9.125)
The volume force calculated from [62]
Xν = −σµν ;µ , (9.126)
gives
Xx =µ0bxπ
2xy
r4+µ0byπ
x2 − y2
r4
Xy = − µ0byπ
2xy
r4+µ0bxπ
x2 − y2
r4
Xz = 0
(9.127)

§9.5 deWit discrete dislocation line 129
and the fields are not in equilibrium. As pointed out by deWit [62], thisis another problem with the Volterra displacements in that there is a netvolume force present. Another example, for the stationary screw (9.3)and edge (9.31) dislocations considered previously, it is straightforwardto show that there is no net volume force present (Xν = 0).
§9.5 deWit discrete dislocation line
In this section, we consider a discrete straight dislocation line runningalong the z-axis, composed of both screw and edge dislocations as de-rived by deWit [62] to correct the Volterra displacements so that no netvolume force is present
Displacements are often difficult to derive, and minimal simplifiedexpressions are often used. For example, the Volterra dislocation ex-pressions that we analyzed in the previous section §9.4 are a case inpoint. deWit mentions that the displacements (9.128) are as he derivedthem, “except for some trivial constants”. In our work, correct dis-placement expressions are needed as they are the basis of the physicalcharacteristics of the deformations, including their strain energy density.
The deWit displacements are given by [62]
ux =bx2π
(θ + β0
xy
r2
)+
by2π
(α0 ln r + β0
y2
r2
)uy = − bx
2π
(α0 ln r + β0
x2
r2
)+
by2π
(θ − β0
xy
r2
)uz =
bz2π
θ
(9.128)
where
α0 =µ0
2µ0 + λ0(9.129)
β0 =µ0 + λ0
2µ0 + λ0. (9.130)
The components of the strain tensor in cartesian coordinates are

130 Chapter 9 Dislocations in the Spacetime Continuum
derived from εµν = 12 (uµ;ν + uν;µ):
εxx = − bx2π
(α0
y
r2+ β0
2x2y
r4
)+
by2π
(α0
x
r2− β0
2xy2
r4
)εyy = − bx
2π
(α0
y
r2− β0
2x2y
r4
)+
by2π
(α0
x
r2+ β0
2xy2
r4
)εzz = 0
εxy =bx2π
β0
(x
r2− 2xy2
r4
)− by
2πβ0
(y
r2− 2x2y
r4
)εyz =
bz4π
x
r2
εxz = − bz4π
y
r2.
(9.131)
The volume dilatation ε for the discrete dislocation line is then givenby
ε = εαα = εxx + εyy + εzz . (9.132)
Substituting for εxx, εyy and εzz from (9.131), we obtain
ε = − 1
π
µ0
2µ0 + λ0
bxy − byxr2
. (9.133)
The mass energy density is calculated from (2.24), viz.
ρc2 = 4κ0 ε = 2(2λ0 + µ0) ε .
Substituting for ε from (9.133), using the positive value of ε as persection §9.3.4, the mass energy density of the discrete dislocation line isgiven by
ρc2 =4
π
κ0µ0
2µ0 + λ0
bxy − byxr2
. (9.134)
The components of the stress tensor in cartesian coordinates are

§9.5 deWit discrete dislocation line 131
given by [62]:
σxx = − µ0bxπ
β0
(y
r2+
2x2y
r4
)+µ0byπ
β0
(x
r2− 2xy2
r4
)σyy = − µ0bx
πβ0
(y
r2− 2x2y
r4
)+µ0byπ
β0
(x
r2+
2xy2
r4
)σzz = − 1
π
µ0λ0
2µ0 + λ0
(bxy − byx
r2
)σxy =
µ0bxπ
β0
(x
r2− 2xy2
r4
)− µ0by
πβ0
(y
r2− 2x2y
r4
)σyz =
µ0bz2π
x
r2
σxz = − µ0bz2π
y
r2.
(9.135)
As shown in [62], the volume force is zero,
Xν = −σµν ;µ = 0 , (9.136)
and the fields are in equilibrium.
We now consider the rotation tensor defined by (3.3), viz.
ωµν = 12 (uµ;ν − uν;µ) .
Given that uµ;ν = uν;µ, the diagonal elements of the rotation tensor arezero. Only the off-diagonal elements are non-zero. Substituting for thedisplacements from (9.131), we obtain
ωxy = −ωyx =1
2π
bxx+ byy
r2
ωyz = −ωzy = − bz4π
x
r2
ωxz = −ωzx =bz4π
y
r2.
(9.137)
In terms of the rotation vector, using (10.1) viz.
ωα =1
2εαµν ωµν ,

132 Chapter 9 Dislocations in the Spacetime Continuum
we obtain
ωx = − bz4π
x
r2
ωy = − bz4π
y
r2
ωz =1
2π
bxx+ byy
r2.
(9.138)
The x and y components of the rotation vector are the components ofbz along those axes respectively, attenuated by a factor 1/r, while the zcomponent of the rotation vector is the moment of the components ofbx and by along the x and y axes also attenuated by a factor 1/r.
§9.5.1 deWit dislocation line strain energy density
The strain energy density of the discrete dislocation line is calculated asfollows. Using (9.133) in (9.50), the discrete dislocation line longitudinaldilatation strain energy density is then given by
E‖ =1
2π2
κ0 µ20
(2µ0 + λ0)2
(bxy − byx)2
r4. (9.139)
The distortion strain energy density is calculated from (9.51), viz.
E⊥ = µ0eαβeαβ .
As seen previously in (9.20),
eαβ = εαβ − esgαβ (9.140)
where es = 14 ε is the volume dilatation calculated in (9.54). Then
eαβeαβ =(εαβ − 1
4 εgαβ) (εαβ − 1
4 εgαβ)
(9.141)
and the distortion strain energy density equation becomes
E⊥ = µ0
(εαβεαβ − 1
4 εgαβεαβ − 1
4 εgαβεαβ + 1
16 ε2gαβgαβ
)= µ0
(εαβεαβ − 1
4 ε2 − 1
4 ε2 + 1
4 ε2) (9.142)
for gαβ = ηαβ . Hence
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (9.143)

§9.5 deWit discrete dislocation line 133
This expression is expanded using the non-zero elements of the straintensor (9.131) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 + 2εyz2 + 2εxz
2 − 14 ε
2). (9.144)
Substituting from (9.131) and (9.133) in the above and simplifying, weobtain
E⊥ =µ0
8π2
b2zr2
+µ0
4π2α2
0
(bxy − byx)2
r4+
+µ0
2π2β2
0
(bxx+ byy)2
r4− 3
2π2
µ0λ0
2µ0 + λ0
bxbyxy
r4.
(9.145)
Setting bz = 0 and by = 0 in the above, we obtain the distortion strainenergy density expression (9.75) for the stationary edge dislocation.
Substituting from (9.138) and (9.139), (9.145) becomes
E⊥ =µ0
8π2
b2zr2
+1
2
µ0
κ0E‖ + 2µ0
(µ0 + λ0
2µ0 + λ0
)2
ω2z−
− 3
2π2
µ0λ0
2µ0 + λ0
bxbyxy
r4.
(9.146)
The first term is the screw dislocation strain energy density of (9.22),the second term is proportional to the edge dislocation distortion strainenergy density arising from the longitudinal strain energy density of(9.139), the third term is the edge dislocation distortion strain energydensity arising from the rotation vector of (9.138) and the last termis a moment distortion strain energy density term. It is interesting tonote that there are no interaction terms (cross-terms) between screwand edge dislocations for a dislocation line. However, as we will see insection §18.4.1, a dislocation line does exhibit self-energy processes.
§9.5.2 deWit dislocation line current and charge density
The current density four-vector is calculated from (4.10), viz.
jν =ϕ0
µ0
2µ0 + λ0
2µ0ε;ν =
ϕ0
2µ0α0ε;ν
and the charge density from (4.14), viz.
% =1
2ϕ0ε0c
2µ0 + λ0
2µ0
√ε;νε;ν =
ϕ0ε0c
4α0
√ε;νε;ν

134 Chapter 9 Dislocations in the Spacetime Continuum
where ϕ0 is the spacetime continuum electromagnetic shearing potentialconstant.
Using the expression for ε from (9.133), the non-zero components ofthe current density are given by
jx =ϕ0
2πµ0
byr2 + 2x (bxy − byx)
r4
jy = − ϕ0
2πµ0
bxr2 − 2y (bxy − byx)
r4
(9.147)
where r2 = x2 + y2. The charge density is given by
% = ± 1
4πϕ0ε0c
1
r2
√b2x + b2y . (9.148)
The sign depends on the problem under consideration.
§9.6 Curved dislocations
In this section, we consider the equations for generally curved disloca-tions (also known as infinitesimal dislocation loops) generated by in-finitesimal elements of a dislocation. These allow us to handle complexdislocations that are encountered in the spacetime continuum.
§9.6.1 The Burgers displacement equation
The Burgers displacement equation for an infinitesimal element of adislocation dl = ξdl in vector notation is given by [123, see p. 102]
u(r) =b
4π
∫A
R · dAR2
− 1
4π
∮C
b× dl′
R+
+1
4π
µ0 + λ0
2µ0 + λ0∇
[∮C
(b × R) · dl′
R
] (9.149)
where u is the displacement vector, r is the vector to the displaced point,r′ is the vector to the dislocation infinitesimal element dl′, R = r′ − r,b is the Burgers vector, and closed loop C bounds the area A.

§9.6 Curved dislocations 135
In tensor notation, (9.149) is given by
uµ(rν) = − 1
8π
∫A
bµ∂
∂x′α(∇′2R
)dAα−
− 1
8π
∮C
bβ εµβγ ∇′2Rdx′γ−
− 1
4π
µ0 + λ0
2µ0 + λ0
∮C
bβ εβαγ ∂2R
∂x′µ ∂x′αdx′γ
(9.150)
where εαβγ is the permutation symbol, equal to 1 for cyclic permuta-tions, −1 for anti-cyclic permutations, and 0 for permutations involvingrepeated indices. As noted by Hirth [123, see p. 103], the first term ofthis equation gives a discontinuity ∆u = b over the surface A, whilethe two other terms are continuous except at the dislocation line. Thisequation is used to calculate the displacement produced at a point r byan arbitrary curved dislocation by integration over the dislocation line.
§9.6.2 The Peach and Koehler stress equation
The Peach and Koehler stress equation for an infinitesimal element ofa dislocation is derived by differentiation of (9.150) and substitution ofthe result in (8.23) [123, see p. 103–106]. In this equation, the disloca-tion is defined continuous except at the dislocation core, removing thediscontinuity over the surface A and allowing to express the stresses interms of line integrals alone.
σµν = − µ0
8π
∮C
bα εβαµ∂
∂x′β(∇′2R
)dx′ν−
− µ0
8π
∮C
bα εβαν∂
∂x′β(∇′2R
)dx′µ−
− µ0
4π
µ0 + λ0
2µ0 + λ0
∮C
bα εβαγ×
×(
∂3R
∂x′β ∂x′µ∂x′ν− δµν
∂
∂x′β(∇′2R
))dx′γ .
(9.151)
This equation is used to calculate the stress field of an arbitrary curveddislocation by line integration.

136

Chapter 10
Disclinations in the Spacetime Continuum
§10.1 Analysis of spacetime continuum disclinations
In this chapter, we investigate disclinations in the spacetime continuumin the context of STCED. As discussed in section §9.1, the theory ofdisclinations is derived by introducing disclinations in the theory ofdislocations, as the theory of disclinations is actually a combined theoryof dislocations and disclinations. The term dispiration is also used toindicate a defect that is a combination of both a translation and arotation.
A disclination is a deformation characterized by a discrete rotationΩ which is represented by the Frank vector Ωµ in a four-dimensionalcontinuum. The rotation is about an axis L in the spacetime continuum.This corresponds to a closure failure of the rotation of a closed circuitaround the disclination line L.
Three types of disclinations can be distinguished (see Fig. 10.1): i) awedge disclination, in which the Frank vector Ωµ is parallel to the axisL and to the cut; ii) a splay disclination, in which the Frank vector Ωµ
is perpendicular to the axis L and parallel to the cut; and iii) a twistdisclination, in which the Frank vector Ωµ is perpendicular to the axis Land to the cut. Note that some authors consider the splay disclinationto be a special case of the twist disclination.
The Frank vector is the fundamental invariant of a disclination. Itis for disclinations what the Burgers vector is for dislocations. In acontinuous isotropic continuum, the Burgers and Frank vectors can bearbitrarily small. This allows us to characterize disclinations similarlyto how dislocations are characterized using a Burgers circuit integral(see section §9.1). As seen in section §3.1, the local rotation tensor isdefined using (3.3), viz.
ωµν = 12 (uµ;ν − uν;µ) .
A rotation vector ωα can be associated with the rotation tensor ωµν
according to
ωα = 12 ε
αµν ωµν (10.1)

138 Chapter 10 Disclinations in the Spacetime Continuum
Figure 10.1: Three types of disclinations: wedge (top), splay (middle),twist (bottom) [150].
where the permutation symbol εαµν is as defined in §8.3, equal to +1for even permutations of αµν, −1 for odd permutations of αµν, 0 forother cases. Then the Frank vector is given by the line integral
Ωµ =
∮C
dωµ (10.2)
where the contour C encloses the disclination line L. Note that theFrank vector can also be associated with a rotation tensor
Ωµ = 12 ε
µαβ Ωαβ . (10.3)

§10.1 Analysis of disclinations 139
In section §9.1, we saw that the Burgers vector is a measure of thedisplacement between the initial and final points of a Burgers circuitdue to a dislocation. This displacement represents a discontinuity inthe spacetime continuum resulting from the dislocation. For a defectthat includes dislocations and disclinations, this discontinuity is char-acterized by Weingarten’s theorem [59,60,150]: following an irreduciblecircuit in a multiply-connected continuum satisfying the elastic com-patibility conditions, the discontinuity in the rotation and displacementcan only consist of a constant vector (the Burgers vector) and a fixedrotation (the Frank vector), given by [60]
[uµ] = bµ + εµαβ Ωαxβ (10.4)
[ωα] = Ωα (10.5)
where the [ ] notation represents a discontinuous change. Frank vectorssatisfy a Kirchhoff relation at disclination nodes, as do Burgers vectorsat dislocation nodes.
Disclinations, as rotational deformations, are associated with spaceswith torsion Sλµν defined by
Sλµν = 12
(Γλµν − Γλνµ
), (10.6)
which is the antisymmetric component of the connection Γλµν and whichtransforms like a proper tensor.
The contortion tensor Kλµν is built from the torsion tensor as fol-
lows:
Kλµν = 1
2
(Sλ·µν − S λ
µ·ν − S λν·µ)
(10.7)
It can more explicitly be defined in terms of the associated torsion tensorSµνλ = Sµν
αgαλ as
Kµνλ = Sµνλ − Sνλµ + Sλµν . (10.8)
The contortion can also be defined in terms of the connection as follows:
Kλµν = Γλµν −
λµ ν
(10.9)
whereλµ ν
is the Christoffel symbol. Note that in a space with torsion,
the gamma connection coefficient is not symmetric over the indices µν,while the Christoffel symbol is, hence explaining relation (10.9).

140 Chapter 10 Disclinations in the Spacetime Continuum
Another field arising from torsion is the bend-twist field [60, 149],also known as torsion-flexure in civil engineering or curvature-twist, isdefined as the gradient of the rotation vector:
κµν = ωµ;ν (10.10)
where the diagonal elements describe a twisting and the off-diagonalelements describe a bending.
§10.2 Volterra dislocations and disclinations
Volterra [269] in his analysis of 1907 considered 6 types of defects: 3dislocations and 3 disclinations. The dislocations included the screwdislocation with displacement bz and two edge dislocations with dis-placements bx and by. The disclinations included the wedge disclinationnormal to the dxy surface, and two twist disclinations normal to the dyzand dzx surfaces. He was the first to derive the displacements for thedislocations and disclinations about the z-axis as follows [198, see p. 58]:
2πux = (bx − dzxz + dxyy) arctan(yx
)+
+ 12 (−by − dyzz − α0 dxyx) ln(x2 + y2)
2πuy = (by − dxyx+ dyzz) arctan(yx
)+
+ 12 (bx − dzxz − α0 dxyy) ln(x2 + y2)
2πuz = (bz − dyzy + dzxx) arctan(yx
)+
+ 12 (dyzx+ dzxy) ln(x2 + y2)
(10.11)
where
α0 =µ0
2µ0 + λ0, (10.12)
the bi’s are dislocation constants specifying the relative displacement ofthe dislocation and the dij ’s are disclination constants specifying theirrelative rotation. These maintain the equilibrium without volume forcesexcept at the core of the defect along the z-axis.

§10.2 Volterra dislocations and disclinations 141
We write (10.11) using the Frank vector as follows:
2πux = (bx − Ωyz + Ωzy) arctan(yx
)+
+ 12 (−by − Ωxz − α0 Ωzx) ln(x2 + y2)
2πuy = (by − Ωzx+ Ωxz) arctan(yx
)+
+ 12 (bx − Ωyz − α0 Ωzy) ln(x2 + y2)
2πuz = (bz − Ωxy + Ωyx) arctan(yx
)+
+ 12 (Ωxx+ Ωyy) ln(x2 + y2)
(10.13)
where (bx, by, bz) is the dislocation Burgers vector and (Ωx,Ωy,Ωz) isthe disclination Frank vector, and where Ωz is the component for thewedge disclination of the core of the defect along the z-axis. Note thatone has
r2 = x2 + y2
θ = arctan(yx
) (10.14)
in cylindrical polar coordinates (r, θ, z).
The rotation tensor and rotation vector are calculated as in section§9.2 from the displacements (10.13). The rotation tensor is then givenby
ωxy =Ωz2π
arctan(yx
)=
Ωz2π
θ
ωyz =Ωx2π
arctan(yx
)− Ωy
4π
[1 + ln
(x2 + y2
)]− bz
4π
=Ωx2π
θ − Ωy4π
(1 + 2 ln r)− bz4π
ωxz = −Ωy2π
arctan(yx
)− Ωx
4π
[1 + ln
(x2 + y2
)]+bz4π
= −Ωy2π
θ − Ωx4π
(1 + 2 ln r) +bz4π
(10.15)

142 Chapter 10 Disclinations in the Spacetime Continuum
and the rotation vector by
ωx =Ωx2π
arctan(yx
)− Ωy
4π
[1 + ln
(x2 + y2
)]− bz
4π
=Ωx2π
θ − Ωy4π
(1 + 2 ln r)− bz4π
ωy =Ωy2π
arctan(yx
)+
Ωx4π
[1 + ln
(x2 + y2
)]− bz
4π
=Ωy2π
θ +Ωx4π
(1 + 2 ln r)− bz4π
ωz =Ωz2π
arctan(yx
)=
Ωz2π
θ .
(10.16)
The bend-twist tensor is given by
κµν = ωµ;ν . (10.17)
The components of the bend-twist tensor in cartesian coordinates arethen given by
κxx = −Ωx2π
y
r2− Ωy
2π
x
r2
κxy =Ωx2π
x
r2− Ωy
2π
y
r2
κxz = 0
κyx = −Ωy2π
y
r2+
Ωx2π
x
r2
κyy =Ωy2π
x
r2+
Ωx2π
y
r2
κyz = 0
κzx = −Ωz2π
y
r2
κzy =Ωz2π
x
r2
κzz = 0 .
(10.18)
The trace of the bend-twist tensor is zero:
Trace(κµν) = καα = 0 . (10.19)

§10.2 Volterra dislocations and disclinations 143
The components of the strain tensor in cartesian coordinates arederived from εµν = 1
2 (uµ;ν + uν;µ):
εxx = − 1
2π(bx − Ωyz + Ωzy)
y
x2 + y2−
− 1
2π(by + Ωxz + α0 Ωzx)
x
x2 + y2− α0
4πΩz ln(x2 + y2)
εyy =1
2π(by − Ωzx+ Ωxz)
x
x2 + y2+
+1
2π(bx − Ωyz − α0 Ωzy)
y
x2 + y2− α0
4πΩz ln(x2 + y2)
εzz = 0
εxy =1
2π(2bx − 2Ωyz + (1− α0) Ωzy)
x
x2 + y2−
− 1
2π(2by + 2Ωxz − (1− α0) Ωzx)
y
x2 + y2
εyz =1
2π(bz − Ωxy + Ωyx)
x
x2 + y2+
+1
2π(Ωxx+ Ωyy)
y
x2 + y2
εxz = − 1
2π(bz − Ωxy + Ωyx)
y
x2 + y2+
+1
2π(Ωxx+ Ωyy)
x
x2 + y2
(10.20)
in an isotropic continuum. The volume dilatation ε for the Volterradislocations and disclinations is then given by
ε = εαα = εxx + εyy + εzz . (10.21)
Substituting for εxx, εyy and εzz from (10.20) into (10.21),
ε = − 1
2π(1 + α0) Ωzx
x
x2 + y2− 1
2π(1 + α0) Ωzy
y
x2 + y2−
− α0
2πΩz ln
(x2 + y2
) (10.22)

144 Chapter 10 Disclinations in the Spacetime Continuum
and using (10.12), we obtain
ε = −Ωz2π
[1 +
µ0
2µ0 + λ0
[1 + ln
(x2 + y2
)]]. (10.23)
The components of the stress tensor in cartesian coordinates areobtained by substituting (10.20) into (8.23):
σxx = 2µ0εxx + λ0ε
= − µ0
π(bx − Ωyz + Ωzy)
y
x2 + y2−
− µ0
π(by + Ωxz + α0 Ωzx)
x
x2 + y2−
− µ0α0
2πΩz ln(x2 + y2)
− Ωzλ0
2π
[1 + α0
[1 + ln
(x2 + y2
)]]σyy = 2µ0εyy + λ0ε
=µ0
π(by − Ωzx+ Ωxz)
x
x2 + y2+
+µ0
π(bx − Ωyz − α0 Ωzy)
y
x2 + y2−
− µ0α0
2πΩz ln(x2 + y2)
− Ωzλ0
2π
[1 + α0
[1 + ln
(x2 + y2
)]]σzz = λ0ε = −Ωzλ0
2π
[1 + α0
[1 + ln
(x2 + y2
)]]σxy =
µ0
π(2bx − 2Ωyz + (1− α0) Ωzy)
x
x2 + y2−
− µ0
π(2by + 2Ωxz − (1− α0) Ωzx)
y
x2 + y2
(10.24)

§10.2 Volterra dislocations and disclinations 145
σyz =µ0
π(bz − Ωxy + Ωyx)
x
x2 + y2+
+µ0
π(Ωxx+ Ωyy)
y
x2 + y2
σxz = − µ0
π(bz − Ωxy + Ωyx)
y
x2 + y2+
+µ0
π(Ωxx+ Ωyy)
x
x2 + y2.
The σxx and σyy components simplify as follows:
σxx = − µ0
π(bx − Ωyz + Ωzy)
y
x2 + y2−
− µ0
π(by + Ωxz + α0 Ωzx)
x
x2 + y2−
− Ωz2π
[λ0(1 + α0) + α0(µ0 + λ0) ln
(x2 + y2
)]σyy =
µ0
π(by − Ωzx+ Ωxz)
x
x2 + y2+
+µ0
π(bx − Ωyz − α0 Ωzy)
y
x2 + y2−
− Ωz2π
[λ0(1 + α0) + α0(µ0 + λ0) ln
(x2 + y2
)].
(10.25)
The mass energy density is calculated from (2.24), viz.
ρc2 = 4κ0 ε = 2(2λ0 + µ0) ε .
Substituting for ε from (10.23), using the positive value of ε as persection §9.3.4, the mass energy density of the Volterra dislocations anddisclinations is given by
ρc2 =2κ0Ωzπ
[1 +
µ0
2µ0 + λ0
[1 + ln
(x2 + y2
)]]. (10.26)
We calculate the strain energy density of the Volterra dislocationsand disclinations as follows. Using (10.23) in (9.50), the longitudinaldilatation strain energy density is then given by
E‖ =κ0Ω2
z
8π2
[1 +
µ0
2µ0 + λ0
[1 + ln
(x2 + y2
)]]2
. (10.27)

146 Chapter 10 Disclinations in the Spacetime Continuum
The distortion strain energy density is calculated from (9.51), viz.
E⊥ = µ0eαβeαβ .
As seen previously, using (9.20), viz.
eαβ = εαβ − esgαβ
where es = 14 ε, (9.51) simplifies to
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (10.28)
This expression is expanded using the non-zero elements of the straintensor (10.20) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 + 2εyz2 + 2εxz
2 − 14 ε
2). (10.29)
Substituting from (10.20) and (10.23) in the above, we obtain
E⊥ =µ0
4π2
(c1x2
r4+ c2
y2
r4+ c3
xy
r4+ c4
x
r2ln r2+
+ c5y
r2ln r2 + c6 ln2 r2 − 4π2ε2
) (10.30)
where the coefficients ci are complicated functions of the following vari-ables:
c1 = f1(x, y, z, bx, by, bz,Ωx,Ωy,Ωz)
c2 = f2(x, y, z, bx, by,Ωx,Ωy,Ωz)
c3 = f3(x, y, z, bx, by,Ωx,Ωy,Ωz)
c4 = α0 (1 + α0) Ω2z x
c5 = α0 (1 + α0) Ω2z y
c6 = 12 α
20 Ω2
z
last term = − 14 Ω2
z
[1 + α0
(1 + ln r2
)]2.
(10.31)
Note that we have explicitly written out the simpler coefficients. Specificcases of the distortion strain energy densities are calculated for combi-nations of the dislocation Burgers vector (bx, by, bz) and the disclinationFrank vector (Ωx,Ωy,Ωz) in other sections of this book.

§10.2 Volterra dislocations and disclinations 147
The volume force for Volterra dislocations and disclinations can becalculated from
Xν = −Tµν ;µ (10.32)
using the stress tensor (10.25). Alternatively, we can make use of (2.6)into the above equation to calculate the volume force from the straintensor using (8.14), viz.
2µ0εµν
;µ + 2µ0/εµν
;µ + λ0ε;ν + λ0/ε
;ν = −Xν .
The full strain tensor of (10.20) can be used in (8.14) as the elasticportion of the strain tensor does not contribute to the volume force,only the defect portion. The volume force is then given by
Xx = − µ0 Ωzπ
(1− 3µ0
2µ0 + λ0− λ0
(2µ0 + λ0)2
)x
x2 + y2−
− µ0
π(−bx + Ωyz + α0 Ωzy)
2xy
(x2 + y2)2−
− µ0
π(−by − Ωxz + Ωzx)
x2 − y2
(x2 + y2)2
Xy = − µ0 Ωzπ
(1− 3µ0
2µ0 + λ0− λ0
(2µ0 + λ0)2
)y
x2 + y2−
− µ0
π(by + Ωxz + α0 Ωzx)
2xy
(x2 + y2)2−
− µ0
π(−bx + Ωyz − Ωzy)
x2 − y2
(x2 + y2)2
Xz = 0 .
(10.33)
The volume force along the z-axis is zero, but there is a net volumeforce along the x-axis and the y-axis.
The Volterra displacements (10.13) can represent dislocations by set-ting the disclination Frank vector (Ωx,Ωy,Ωz) to zero. Stationary screwdislocations are represented by setting bx = by = 0. We then obtain theresults of section §9.2. Stationary edge dislocations are represented bysetting bz = 0. The results are similar to those of section §9.3, exceptthat only bx is not equal to 0 in section §9.3, while both bx and by arenot equal to 0 in Volterra’s displacements (10.13). Volterra dislocationswere considered in greater details in §9.4.
Similarly, (10.13) can represent disclinations by setting the disloca-tion Burgers vector (bx, by, bz) to zero. Stationary wedge disclinations

148 Chapter 10 Disclinations in the Spacetime Continuum
are represented by setting Ωx = Ωy = 0 with only Ωz not equal to zero.We then obtain the results for wedge disclinations of section §10.3. Sta-tionary twist disclinations are represented by setting Ωz = 0. We thenobtain the results for twist disclinations of section §10.4.
§10.3 Volterra wedge disclinations
Stationary wedge disclinations are represented by setting the disloca-tion Burgers vector (bx, by, bz) to zero and the disclination Frank vectorcomponents Ωx = Ωy = 0 with only Ωz not equal to zero in (10.13) toobtain
ux =Ωz2π
[y arctan
(yx
)− α0
2x ln(x2 + y2)
]uy = −Ωz
2π
[x arctan
(yx
)+α0
2y ln(x2 + y2)
]uz = 0
(10.34)
which can also be written as
ux =Ωz2π
[y θ − α0 x ln r]
uy = −Ωz2π
[x θ + α0 y ln r]
uz = 0
(10.35)
where again
r2 = x2 + y2
θ = arctan(yx
) (10.36)
in cylindrical polar coordinates (r, θ, z).
The rotation tensor and rotation vector are calculated as in section§9.2 from the displacements (10.34). The rotation tensor is then givenby
ωxy =Ωz2π
arctan(yx
)=
Ωz2π
θ
ωyz = 0
ωxz = 0
(10.37)

§10.3 Volterra wedge disclinations 149
and the rotation vector by
ωx = 0
ωy = 0
ωz =Ωz2π
arctan(yx
)=
Ωz2π
θ .
(10.38)
The rotation vector has only one component along the z-axis.The bend-twist tensor is given by
κµν = ωµ;ν . (10.39)
The components of the bend-twist tensor in cartesian coordinates arethen given by
κxx = 0 , κxy = 0 , κxz = 0 ,
κyx = 0 , κyy = 0 , κyz = 0 ,
κzx = −Ωz2π
y
r2, κzy =
Ωz2π
x
r2, κzz = 0 .
(10.40)
The diagonal elements are zero, indicating no twist, while the zx andzy off-diagonal elements are non-zero, indicating bending along thatdirection.
The components of the strain tensor in cartesian coordinates arederived from εµν = 1
2 (uµ;ν + uν;µ):
εxx = −Ωz2π
[y2
x2 + y2+ α0
x2
x2 + y2+α0
2ln(x2 + y2)
]εyy = −Ωz
2π
[x2
x2 + y2+ α0
y2
x2 + y2+α0
2ln(x2 + y2)
]εzz = 0
εxy =Ωz2π
(1− α0)xy
x2 + y2
εyz = 0
εxz = 0
(10.41)

150 Chapter 10 Disclinations in the Spacetime Continuum
which can be written as
εxx = −Ωz2π
[y2
r2+ α0
x2
r2+ α0 ln r
]εyy = −Ωz
2π
[x2
r2+ α0
y2
r2+ α0 ln r
]εzz = 0
εxy =Ωz2π
(1− α0)xy
r2
εyz = 0
εxz = 0 .
(10.42)
The volume dilatation ε for the wedge disclination is then given by
ε = εαα = εxx + εyy + εzz . (10.43)
Substituting for εxx, εyy and εzz from (10.41) into (10.43),
ε = −Ωz2π
[1 + α0 + α0 ln
(x2 + y2
)]ε = −Ωz
2π[1 + α0 + 2α0 ln r]
(10.44)
and using (10.12), we obtain
ε = −Ωz2π
[1 +
µ0
2µ0 + λ0
[1 + ln
(x2 + y2
)]]. (10.45)
The components of the stress tensor in cartesian coordinates are

§10.3 Volterra wedge disclinations 151
obtained from (10.24):
σxx = − µ0Ωzπ
α0x2 + y2
x2 + y2−
− Ωz2π
[λ0(1 + α0) + (µ0 + λ0)α0 ln
(x2 + y2
)]σyy = − µ0Ωz
π
x2 + α0y2
x2 + y2−
− Ωz2π
[λ0(1 + α0) + (µ0 + λ0)α0 ln
(x2 + y2
)]σzz = − λ0Ωz
2π
[1 + α0 + α0 ln
(x2 + y2
)]σxy =
µ0Ωzπ
(1− α0)xy
x2 + y2
σyz = 0
σxz = 0
(10.46)
which can also be written as
σxx = − µ0Ωzπ
α0x2 + y2
r2−
− Ωz2π
[λ0(1 + α0) + 2(µ0 + λ0)α0 ln r
]σyy = − µ0Ωz
π
x2 + α0y2
r2−
− Ωz2π
[λ0(1 + α0) + 2(µ0 + λ0)α0 ln r
]σzz = − λ0Ωz
2π[1 + α0 + 2α0 ln r]
σxy =µ0Ωzπ
(1− α0)xy
r2
σyz = 0
σxz = 0 .
(10.47)

152 Chapter 10 Disclinations in the Spacetime Continuum
The mass energy density is calculated from (2.24), viz.
ρc2 = 4κ0 ε = 2(2λ0 + µ0) ε .
Substituting for ε from (10.45), using the positive value of ε as persection §9.3.4, the mass energy density of the wedge disclination is gi-ven by
ρc2 =2κ0Ωzπ
[1 +
µ0
2µ0 + λ0
[1 + ln
(x2 + y2
)]]. (10.48)
We calculate the strain energy density of the wedge disclination asfollows. Using (10.45) in (9.50), the longitudinal dilatation strain energydensity is then given by
E‖ =κ0Ω2
z
8π2
[1 +
µ0
2µ0 + λ0
[1 + ln
(x2 + y2
)]]2
. (10.49)
The distortion strain energy density is calculated from (9.51), viz.
E⊥ = µ0eαβeαβ .
As seen previously, using (9.20), viz.
eαβ = εαβ − esgαβ
where es = 14 ε, (9.51) simplifies to
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (10.50)
This expression is expanded using the non-zero elements of the straintensor (10.42) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 − 14 ε
2). (10.51)
Substituting from (10.42) and (10.45) in the above, we obtain
E⊥ =µ0Ω2
z
4π2
[3
4
(1− 2
3α0 + α2
0
)+ α0 [1 + α0(1 + ln r) ln r]
](10.52)
where
α0 =µ0
2µ0 + λ0. (10.53)
The volume force for wedge disclinations can be calculated from
Xν = −Tµν ;µ (10.54)

§10.4 Volterra twist disclinations 153
using the stress tensor (10.47). The volume force is then given by
Xx = − µ0 Ωzπ
x
x2 + y2
(µ0 + λ0
2µ0 + λ0− 2(1− α0)x2
x2 + y2
)Xy =
µ0 Ωzπ
y
x2 + y2
(µ0 + λ0
2µ0 + λ0− 2(1− α0)y2
x2 + y2
)Xz = 0 .
(10.55)
The volume force along the z-axis is zero, but there is a net volumeforce along the x-axis and the y-axis.
§10.4 Volterra twist disclinations
Stationary twist disclinations are represented by setting the dislocationBurgers vector (bx, by, bz) to zero and the disclination Frank vector com-ponent Ωz = 0 in (10.13). Both Ωx and Ωy are not equal to zero. Notethat we do not differentiate between twist and splay disclinations in thissection as twist disclination expressions include both pure twist discli-nations and splay disclinations. Note that when we need to differentiatebetween splay and twist disclinations, we will use the terminology “puretwist disclination” to refer to the twist disclination. With these substi-tutions, we obtain
ux = −Ωy2π
z arctan(yx
)− Ωx
4πz ln(x2 + y2)
uy =Ωx2π
z arctan(yx
)− Ωy
4πz ln(x2 + y2)
uz =
(−Ωx
2πy +
Ωy2π
x
)arctan
(yx
)+
+
(Ωx4π
x+Ωy4π
y
)ln(x2 + y2)
(10.56)
which can be written as
ux = −Ωy2π
z θ − Ωx2π
z ln r
uy =Ωx2π
z θ − Ωy2π
z ln r
uz =
(−Ωx
2πy +
Ωy2π
x
)θ +
(Ωx2π
x+Ωy2π
y
)ln r
(10.57)

154 Chapter 10 Disclinations in the Spacetime Continuum
in cylindrical polar coordinates (r, θ, z).
The rotation tensor and rotation vector are calculated as in section§9.2 from the displacements (10.56). The rotation tensor is then givenby
ωxy = 0
ωyz =Ωx2π
arctan(yx
)− Ωy
4π
[1 + ln
(x2 + y2
)]=
Ωx2π
θ − Ωy4π
(1 + 2 ln r)
ωxz = −Ωy2π
arctan(yx
)− Ωx
4π
[1 + ln
(x2 + y2
)]= −Ωy
2πθ − Ωx
4π(1 + 2 ln r) .
(10.58)
and the rotation vector by
ωx =Ωx2π
arctan(yx
)− Ωy
4π
[1 + ln
(x2 + y2
)]=
Ωx2π
θ − Ωy4π
(1 + 2 ln r)
ωy =Ωy2π
arctan(yx
)+
Ωx4π
[1 + ln
(x2 + y2
)]=
Ωy2π
θ +Ωx4π
(1 + 2 ln r)
ωz = 0 .
(10.59)
The rotation vector has x and y components, but no z component, whichis associated with the wedge disclination.
The bend-twist tensor is given by
κµν = ωµ;ν . (10.60)
The components of the bend-twist tensor in cartesian coordinates are

§10.4 Volterra twist disclinations 155
then given by
κxx = −Ωx2π
y
r2− Ωy
2π
x
r2,
κxy =Ωx2π
x
r2− Ωy
2π
y
r2, κxz = 0 ,
κyx = −Ωy2π
y
r2+
Ωx2π
x
r2,
κyy =Ωy2π
x
r2+
Ωx2π
y
r2, κyz = 0 ,
κzx = 0 , κzy = 0 , κzz = 0 .
(10.61)
The trace of the bend-twist tensor is zero as required:
Trace(κµν) = καα = 0 , (10.62)
The components of the strain tensor in cartesian coordinates arederived from εµν = 1
2 (uµ;ν + uν;µ):
εxx =Ωy2π
zy
x2 + y2− Ωx
2πz
x
x2 + y2
εyy =Ωx2π
zx
x2 + y2− Ωy
2πz
y
x2 + y2
εzz = 0
εxy = −Ωyπz
x
x2 + y2− Ωx
πz
y
x2 + y2
εyz =
(−Ωx
2πy +
Ωy2π
x
)x
x2 + y2+
+
(Ωx2π
x+Ωy2π
y
)y
x2 + y2
εxz =
(Ωx2π
y − Ωy2π
x
)y
x2 + y2+
+
(Ωx2π
x+Ωy2π
y
)x
x2 + y2.
(10.63)
The volume dilatation ε for the twist disclinations is then given by
ε = εαα = εxx + εyy + εzz . (10.64)

156 Chapter 10 Disclinations in the Spacetime Continuum
Substituting for εxx, εyy and εzz from (10.63) into (10.64),
ε = 0 . (10.65)
Hence the Volterra twist disclination does not have a volume dilatationlike a wedge disclination, but is rather a pure distortion. As we will seelater, this means that there is no rest-mass energy density associatedwith the Volterra twist disclination. We will revisit this result for thedeWit twist disclination.
The components of the stress tensor in cartesian coordinates areobtained from (10.24) as follows:
σxx =µ0Ωyπ
zy
x2 + y2− µ0Ωx
πz
x
x2 + y2
σyy =µ0Ωxπ
zx
x2 + y2− µ0Ωy
πz
y
x2 + y2
σzz = 0
σxy = −2µ0Ωyπ
zx
x2 + y2− 2µ0Ωx
πz
y
x2 + y2
σyz =
(− µ0Ωx
πy +
µ0Ωyπ
x
)x
x2 + y2+
+
(µ0Ωxπ
x+µ0Ωyπ
y
)y
x2 + y2=µ0Ωyπ
σxz =
(µ0Ωxπ
y − µ0Ωyπ
x
)y
x2 + y2+
+
(µ0Ωxπ
x+µ0Ωyπ
y
)x
x2 + y2=µ0Ωxπ
.
(10.66)
The mass energy density is calculated from (2.24), viz.
ρc2 = 4κ0 ε = 2(2λ0 + µ0) ε .
Substituting for ε from (10.65), the mass energy density of the twistdisclinations is 0 as discussed previously:
ρc2 = 0 . (10.67)
Similarly, when we calculate the strain energy density of the twist discli-nations using (10.65) in (9.50), the longitudinal dilatation strain energy

§10.4 Volterra twist disclinations 157
density is also 0 (i.e. it is massless):
E‖ = 0 . (10.68)
The distortion strain energy density is calculated from (9.51), viz.
E⊥ = µ0eαβeαβ .
As seen previously, using (9.20), viz.
eαβ = εαβ − esgαβ
where es = 14 ε, (9.51) simplifies to
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (10.69)
This expression is expanded using the non-zero elements of the straintensor (10.63) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 + 2εyz2 + 2εxz
2 − 14 ε
2). (10.70)
Substituting from (10.63) and (10.65) in the above, we obtain
E⊥ =µ0
2π2
(Ω2x + Ω2
y
)(1 +
z2
r2
)+
+µ0
2π2(Ωxy + Ωyx)
2 z2
r4
(10.71)
which can be also expressed as
E⊥ =µ0
2π2
(Ω2x + Ω2
y
)+
+µ0
2π2
z2
r2
[Ω2x + Ω2
y +(Ωxy + Ωyx)
2
r2
].
(10.72)
The volume force for twist disclinations can be calculated from
Xν = −σµν ;µ (10.73)
using the stress tensor (10.66). The volume force is then given by
Xx =µ0Ωxπ
zx2 − y2
(x2 + y2)2− µ0Ωy
πz
2xy
(x2 + y2)2
Xy = − µ0Ωxπ
z2xy
(x2 + y2)2− µ0Ωy
πz
x2 − y2
(x2 + y2)2
Xz = 0 .
(10.74)
The volume force along the z-axis is zero, but there is a net volumeforce along the x-axis and the y-axis.

158 Chapter 10 Disclinations in the Spacetime Continuum
§10.5 deWit discrete disclination lines
As we have seen in the previous sections on disclinations, deWit [62]points out that the Volterra dislocation and disclination displacements(10.11) are not in equilibrium, and that a volume force Xν is present inthe continuum. He proposed corrected disclination line displacementsthat are in equilibrium, for which no volume force is present (Xν = 0).These are given by [62]
ux = −Ωx2π
z
(µ0
2µ0 + λ0ln r +
µ0 + λ0
2µ0 + λ0
y2
r2
)+
+Ωy2π
z
(θ +
µ0 + λ0
2µ0 + λ0
xy
r2
)−
− Ωz2π
(y θ − µ0
2µ0 + λ0x (ln r − 1)
)uy = −Ωx
2πz
(θ − µ0 + λ0
2µ0 + λ0
xy
r2
)−
− Ωy2π
z
(µ0
2µ0 + λ0ln r +
µ0 + λ0
2µ0 + λ0
x2
r2
)+
+Ωz2π
(x θ +
µ0
2µ0 + λ0y (ln r − 1)
)uz =
Ωx2π
(y θ − µ0
2µ0 + λ0x (ln r − 1)
)−
− Ωy2π
(x θ +
µ0
2µ0 + λ0y (ln r − 1)
)
(10.75)
where r2 = x2 +y2 and θ = arctan(y/x) in cylindrical polar coordinates(r, θ, z). These displacements do not include the dislocation Burgersvector bµ as it has been set to zero. Those were covered in section §9.4.Only disclination displacements are included in the above, modified byDeWit to obtain a zero volume force. We note in particular added termsproportional to x2/r2, y2/r2 and xy/r2 which are present in (10.33). Aspointed out in [62], the asymptotic dependence of the displacements isr ln r.
We simplify (10.75) with the use of the parameters α0 and β0:
ux = −Ωx2π
z
[α0 ln r + β0
y2
r2
]+
Ωy2π
z[θ + β0
xy
r2
]− (10.76)

§10.5 deWit discrete disclination lines 159
− Ωz2π
[y θ − α0 x (ln r − 1)]
uy = −Ωx2π
z[θ − β0
xy
r2
]− Ωy
2πz
[α0 ln r + β0
x2
r2
]+
+Ωz2π
[x θ + α0 y (ln r − 1)]
uz =Ωx2π
[y θ − α0 x (ln r − 1)]− Ωy2π
[x θ + α0 y (ln r − 1)]
where
α0 =µ0
2µ0 + λ0(10.77)
β0 =µ0 + λ0
2µ0 + λ0. (10.78)
The elastic strain components are calculated from εij = 12 (ui,j+uj,i):
εxx = −Ωx2π
z
(α0
x
r2− 2β0
xy2
r4
)−
− Ωy2π
z
(α0
y
r2+ 2β0
x2y
r4
)+
Ωz2π
(α0 ln r + β0
y2
r2
)εyy = −Ωx
2πz
(α0
x
r2+ 2β0
xy2
r4
)−
− Ωy2π
z
(α0
y
r2− 2β0
x2y
r4
)+
Ωz2π
(α0 ln r + β0
x2
r2
)εzz = 0
εxy =Ωx2π
z β0
(y
r2− 2
x2y
r4
)+
+Ωy2π
z β0
(x
r2− 2
xy2
r4
)− Ωz
2πβ0xy
r2
εyz =Ωx2π
β0xy
r2− Ωy
2π
(α0 ln r + β0
x2
r2
)εzx = −Ωx
2π
(α0 ln r + β0
y2
r2
)+
Ωy2π
β0xy
r2.
(10.79)

160 Chapter 10 Disclinations in the Spacetime Continuum
Again, the volume dilatation ε is given by
ε = εαα = εxx + εyy + εzz . (10.80)
Substituting for εxx, εyy and εzz from (10.79) into (10.80), we obtain
ε = − 1
π
µ0
2µ0 + λ0(Ωxx+ Ωyy)
z
r2+
+Ωzπ
(µ0
2µ0 + λ0ln r +
1
2
µ0 + λ0
2µ0 + λ0
).
(10.81)
The components of the stress tensor in cartesian coordinates aregiven by
σxx = − µ0β0
π
[Ωx z
(x
r2− 2
xy2
r4
)+ Ωy z
(y
r2+ 2
x2y
r4
)−
−Ωz
(ln r +
y2
r2+
λ0
2µ0
)]σyy = − µ0β0
π
[Ωx z
(x
r2+ 2
xy2
r4
)+ Ωy z
(y
r2− 2
x2y
r4
)−
−Ωz
(ln r +
x2
r2+
λ0
2µ0
)]σzz = − λ0
π
[α0 (Ωxx+ Ωyy)
z
r2− Ωz
(α0 ln r +
1
2β0
)]σxy =
µ0β0
π
[Ωx z
(y
r2− 2
x2y
r4
)+
+Ωy z
(x
r2− 2
xy2
r4
)− Ωz
xy
r2
]σyz =
µ0Ωxπ
β0xy
r2− µ0Ωy
π
(α0 ln r + β0
x2
r2
)σzx = − µ0Ωx
π
(α0 ln r + β0
y2
r2
)+µ0Ωyπ
β0xy
r2.
(10.82)
Calculating the volume force from
Xν = −σµν ;µ ,
we find that this stress tensor results in no volume force in the continuum(Xν = 0) as required.

§10.5 deWit discrete disclination lines 161
The components of the rotation tensor in cartesian coordinates aregiven by
ωx =Ωx2π
θ
ωy =Ωy2π
θ
ωz =Ωz2π
θ +Ωx2π
yz
r2− Ωy
2π
xz
r2.
(10.83)
The components of the elastic bend-twist tensor in cartesian coor-dinates are given by
κxx = −Ωx2π
y
r2
κyx =Ωx2π
x
r2
κzx = 0
κxy = −Ωy2π
y
r2
κyy =Ωy2π
x
r2
κzy = 0
κxz = −Ωxπ
xyz
r4− Ωy
2πz
[1
r2− 2
x2
r4
]− Ωz
2π
y
r2
κyz = −Ωx2π
z
[1
r2− 2
y2
r4
]+
Ωyπ
xyz
r4+
Ωz2π
x
r2
κzz =Ωx2π
y
r2− Ωy
2π
x
r2.
(10.84)
We find that as expected, the trace of the elastic bend-twist tensor iszero
Trace(κµν) = καα = 0 , (10.85)
indicating that there is no net twist present in the continuum.The mass energy density is calculated from (2.24), viz.
ρc2 = 4κ0 ε = 2(2λ0 + µ0) ε .

162 Chapter 10 Disclinations in the Spacetime Continuum
Substituting for ε from (10.81), using the positive value of ε as persection §9.3.4, the mass energy density of the disclination line is givenby
ρc2 =4κ0
πα0 (Ωxx+ Ωyy)
z
r2− 4κ0Ωz
π
(α0 ln r +
1
2β0
). (10.86)
We will encounter other combinations of positive and negative rest-massenergy density terms in other cases.
We calculate the strain energy density of the disclination line asfollows. Using (10.81) in (9.50), the longitudinal dilatation strain energydensity is then given by
E‖ =κ0
2π2
[−α0 (Ωxx+ Ωyy)
z
r2+ Ωz
(α0 ln r +
1
2β0
)]2
. (10.87)
The distortion strain energy density is calculated from (9.51), viz.
E⊥ = µ0eαβeαβ .
As seen previously, using (9.20), viz.
eαβ = εαβ − esgαβ
where es = 14 ε, (9.51) simplifies to
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (10.88)
This expression is expanded using the non-zero elements of the straintensor (10.79) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 − 14 ε
2). (10.89)
Substituting from (10.79) and (10.81) in the above, we note that E⊥ canbe separated into the following terms:
E⊥ = EW⊥ + ET⊥ + ΩxΩzterms + ΩyΩzterms (10.90)
where EW⊥ is the wedge disclination distortion strain energy densitygiven by (10.108) and ET⊥ is the twist disclination distortion strain en-ergy density given by (10.127). The ΩxΩz and ΩyΩz cross-terms repre-sent the energy interaction terms for the wedge and twist disclinations:
EW−T⊥ int = ΩxΩzterms + ΩyΩzterms . (10.91)

§10.6 deWit wedge disclinations 163
Computing the ΩxΩz terms and the ΩyΩz terms, we obtain thewedge-twist disclination interaction strain energy density
EW−T⊥ int = − µ0ΩxΩz2π2
xz
r2
[2α2
0 ln r + α0β0 + β20
y2
r2
(1− 2y2
r2
)]− µ0ΩyΩz
2π2
yz
r2
[2α2
0 ln r + α0β0 + β20
x2
r2
(1− 2x2
r2
)].
(10.92)
Hence
E⊥ = EW⊥ + ET⊥ + EW−T⊥ int . (10.93)
It is important to note that the interaction does not involve longitu-dinal terms, only distortion terms. In section §17.2, we consider theinteraction terms of dislocations and disclinations arising from the gen-eral displacements derived from the general combined deWit dislocationdisplacements (9.128) and disclination displacements (10.76).
§10.6 deWit wedge disclinations
The deWit wedge disclinations are represented by setting the disclina-tion Frank vector components Ωx = Ωy = 0 with only Ωz not equal tozero in (10.75) to obtain
ux = − Ωz2π
(y θ − α0 x (ln r − 1))
uy =Ωz2π
(x θ + α0 y (ln r − 1))
uz = 0
(10.94)
where r2 = x2 +y2 and θ = arctan(y/x) in cylindrical polar coordinates(r, θ, z).
The elastic strain components are calculated from εij = 12 (ui,j+uj,i):
εxx =Ωz2π
(α0 ln r + β0
y2
r2
)εyy =
Ωz2π
(α0 ln r + β0
x2
r2
)εzz = 0
(10.95)

164 Chapter 10 Disclinations in the Spacetime Continuum
εxy = −Ωz2πβ0xy
r2
εyz = 0
εzx = 0 .
Again, the volume dilatation ε is given by
ε = εαα = εxx + εyy + εzz . (10.96)
Substituting for εxx, εyy and εzz from (10.95) into (10.96), we obtain
ε =Ωzπ
(µ0
2µ0 + λ0ln r +
1
2
µ0 + λ0
2µ0 + λ0
). (10.97)
The components of the stress tensor in cartesian coordinates aregiven by
σxx =µ0β0Ωz
π
(ln r +
y2
r2+
λ0
2µ0
)σyy =
µ0β0Ωzπ
(ln r +
x2
r2+
λ0
2µ0
)σzz =
λ0Ωzπ
(α0 ln r +
1
2β0
)σxy = − µ0β0Ωz
π
xy
r2
σyz = 0
σzx = 0 .
(10.98)
Calculating the volume force from
Xν = −σµν ;µ ,
we find that this stress tensor results in no volume force in the continuum(Xν = 0) as required.
The components of the rotation tensor in cartesian coordinates aregiven by
ωx = 0
ωy = 0
ωz =Ωz2π
.
(10.99)

§10.6 deWit wedge disclinations 165
The components of the elastic bend-twist tensor in cartesian coor-dinates are given by
κxx = 0
κyx = 0
κzx = 0
κxy = 0
κyy = 0
κzy = 0
κxz = −Ωz2π
y
r2
κyz =Ωz2π
x
r2
κzz = 0 .
(10.100)
We find that as expected, the trace of the elastic bend-twist tensor iszero
Trace(κµν) = καα = 0 , (10.101)
indicating that there is no net twist present in the continuum.The mass energy density is calculated from (2.24), viz.
ρc2 = 4κ0 ε = 2(2λ0 + µ0) ε .
Substituting for ε from (10.97), using the positive value of ε as persection §9.3.4, the mass energy density of the wedge disclination is gi-ven by
ρc2 =4κ0Ωzπ
(µ0
2µ0 + λ0ln r +
1
2
µ0 + λ0
2µ0 + λ0
). (10.102)
We calculate the strain energy density of the wedge disclination asfollows. Using (10.97) in (9.50), the longitudinal dilatation strain energydensity is then given by
E‖ =κ0Ω2
z
2π2
(µ0
2µ0 + λ0ln r +
1
2
µ0 + λ0
2µ0 + λ0
)2
(10.103)

166 Chapter 10 Disclinations in the Spacetime Continuum
or
E‖ =κ0Ω2
z
2π2
(α0 ln r +
1
2β0
)2
. (10.104)
The distortion strain energy density is calculated from (9.51), viz.
E⊥ = µ0eαβeαβ .
As seen previously, using (9.20), viz.
eαβ = εαβ − esgαβ
where es = 14 ε, (9.51) simplifies to
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (10.105)
This expression is expanded using the non-zero elements of the straintensor (10.95) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 − 14 ε
2). (10.106)
Substituting from (10.95) and (10.97) in the above and simplifying, weobtain
E⊥ =µ0Ω2
z
4π2
(α2
0 ln2 r + 3α0β0 ln r +3
4β2
0
)(10.107)
which can be further simplified to
E⊥ =µ0Ω2
z
4π2
[(α0 ln r +
3
2β0
)2
−(
3
2β0
)2]. (10.108)
§10.6.1 deWit wedge disclination current and charge density
The current density four-vector is calculated from (4.10), viz.
jν =ϕ0
µ0
2µ0 + λ0
2µ0ε;ν =
ϕ0
2µ0α0ε;ν
and the charge density from (4.14), viz.
% =1
2ϕ0ε0c
2µ0 + λ0
2µ0
√ε;νε;ν =
ϕ0ε0c
4α0
√ε;νε;ν
where ϕ0 is the spacetime continuum electromagnetic shearing potentialconstant.

§10.7 deWit twist disclinations 167
Using the expression for ε from (10.97), the non-zero components ofthe current density are given by
jx =ϕ0Ωz2πµ0
x
r2=ϕ0Ωz2πµ0
cos θ
r
jy = −ϕ0Ωz2πµ0
y
r2=ϕ0Ωz2πµ0
sin θ
r
(10.109)
where r2 = x2 + y2. The charge density is given by
% = ± 1
4πϕ0ε0c
Ωzr2
. (10.110)
The sign depends on the problem under consideration.The charge is given by integrating % over the volume V :
Q =
∫V
% dV =
∫V
% rdr dθ dz (10.111)
in cylindrical polar coordinates. This becomes
Q = ± 1
4πϕ0ε0cΩz
∫ R
b0
1
rdr
∫ 2π
0
dθ
∫ `
0
dz (10.112)
where b0 is the radius of the core of the disclination and R is the “radius”of the cylindrical deformation. Evaluating the integrals, we get
Q = ±1
2ϕ0 ε0 c `Ωz ln
(R
b0
)(10.113)
where Ωz is a rotation along the z-axis, perpendicular to the x-y plane.If a vector perpendicular to the x-y plane can be associated with Ωz,then its units will be [m] along the z-axis, and the units of Q will be[C] as expected. If Ωz is purely a rotation, then the units of Q will be[C ·m−1].
§10.7 deWit twist disclinations
The deWit twist disclinations are represented by setting the disclinationFrank vector component Ωz = 0 in (10.75). Both Ωx and Ωy are notequal to zero. Note that again we do not differentiate between twistand splay disclinations in this section as twist disclination expressionsinclude both pure twist disclinations and splay disclinations. Note thatwhen we need to differentiate between splay and twist disclinations, we

168 Chapter 10 Disclinations in the Spacetime Continuum
will use the terminology “pure twist disclination” to refer to the twistdisclination. With these substitutions, we obtain
ux = −Ωx2π
z
(α0 ln r + β0
y2
r2
)+
Ωy2π
z(θ + β0
xy
r2
)uy = −Ωx
2πz(θ − β0
xy
r2
)− Ωy
2πz
(α0 ln r + β0
x2
r2
)uz =
Ωx2π
(y θ − α0 x (ln r − 1))− Ωy2π
(x θ + α0 y (ln r − 1))
(10.114)
where r2 = x2 +y2 and θ = arctan(y/x) in cylindrical polar coordinates(r, θ, z).
The elastic strain components are calculated from εij = 12 (ui,j+uj,i):
εxx = −Ωx2π
z
(α0
x
r2− 2β0
xy2
r4
)−
− Ωy2π
z
(α0
y
r2+ 2β0
x2y
r4
)εyy = −Ωx
2πz
(α0
x
r2+ 2β0
xy2
r4
)−
− Ωy2π
z
(α0
y
r2− 2β0
x2y
r4
)εzz = 0
εxy =Ωx2π
z β0
(y
r2− 2
x2y
r4
)+
+Ωy2π
z β0
(x
r2− 2
xy2
r4
)εyz =
Ωx2π
β0xy
r2− Ωy
2π
(α0 ln r + β0
x2
r2
)εzx = −Ωx
2π
(α0 ln r + β0
y2
r2
)+
Ωy2π
β0xy
r2.
(10.115)
Again, the volume dilatation ε is given by
ε = εαα = εxx + εyy + εzz . (10.116)

§10.7 deWit twist disclinations 169
Substituting for εxx, εyy and εzz from (10.115) into (10.116), we obtain
ε = − 1
π
µ0
2µ0 + λ0(Ωxx+ Ωyy)
z
r2(10.117)
or
ε = − α0
π(Ωxx+ Ωyy)
z
r2. (10.118)
The components of the stress tensor in cartesian coordinates aregiven by
σxx = − µ0β0
π
[Ωx z
(x
r2− 2
xy2
r4
)+ Ωy z
(y
r2+ 2
x2y
r4
)]σyy = − µ0β0
π
[Ωx z
(x
r2+ 2
xy2
r4
)+ Ωy z
(y
r2− 2
x2y
r4
)]σzz = − λ0
π
[α0 (Ωxx+ Ωyy)
z
r2
]σxy =
µ0β0
π
[Ωx z
(y
r2− 2
x2y
r4
)+ Ωy z
(x
r2− 2
xy2
r4
)]σyz =
µ0Ωxπ
β0xy
r2− µ0Ωy
π
(α0 ln r + β0
x2
r2
)σzx = − µ0Ωx
π
(α0 ln r + β0
y2
r2
)+µ0Ωyπ
β0xy
r2.
(10.119)
Calculating the volume force from
Xν = −σµν ;µ ,
we find that this stress tensor results in no volume force in the continuum(Xν = 0) as required.
The components of the rotation tensor in cartesian coordinates aregiven by
ωx =Ωx2π
θ
ωy =Ωy2π
θ
ωz =Ωx2π
yz
r2− Ωy
2π
xz
r2.
(10.120)

170 Chapter 10 Disclinations in the Spacetime Continuum
The components of the elastic bend-twist tensor in cartesian coor-dinates are given by
κxx = −Ωx2π
y
r2
κyx =Ωx2π
x
r2
κzx = 0
κxy = −Ωy2π
y
r2
κyy =Ωy2π
x
r2
κzy = 0
κxz = −Ωxπ
xyz
r4− Ωy
2πz
(1
r2− 2
x2
r4
)κyz = −Ωx
2πz
(1
r2− 2
y2
r4
)+
Ωyπ
xyz
r4
κzz =Ωx2π
y
r2− Ωy
2π
x
r2.
(10.121)
We find that as expected, the trace of the elastic bend-twist tensor iszero
Trace(κµν) = καα = 0 , (10.122)
indicating that there is no net twist present in the continuum.The mass energy density is calculated from (2.24), viz.
ρc2 = 4κ0 ε = 2(2λ0 + µ0) ε .
Substituting for ε from (10.117), using the positive value of ε as persection §9.3.4, the mass energy density of the twist disclination is givenby
ρc2 =4κ0
π
µ0
2µ0 + λ0(Ωxx+ Ωyy)
z
r2. (10.123)
We calculate the strain energy density of the twist disclination as fol-lows. Using (10.117) in (9.50), the longitudinal dilatation strain energydensity is then given by
E‖ =κ0
2π2
(µ0
2µ0 + λ0(Ωxx+ Ωyy)
z
r2
)2
. (10.124)

§10.7 deWit twist disclinations 171
The distortion strain energy density is calculated from (9.51), viz.
E⊥ = µ0eαβeαβ .
As seen previously, using (9.20), viz.
eαβ = εαβ − esgαβ
where es = 14 ε, (9.51) simplifies to
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (10.125)
This expression is expanded using the non-zero elements of the straintensor (10.115) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 + 2εyz2 + 2εzx
2 − 14 ε
2). (10.126)
Substituting from (10.115) and (10.117) in the above, we obtain
E⊥ =µ0Ω2
x
2π2
[α2
0 ln2 r +β2
0
r2+ 2α0β0
y2
r2ln r+
+[(α2
0 − 12 β
20
)x2 + β2
0y2] z2
r4
]+
+µ0Ω2
y
2π2
[α2
0 ln2 r +β2
0
r2+ 2α0β0
x2
r2ln r+
+[β2
0x2 +
(α2
0 − 12 β
20
)y2] z2
r4
]−
− µ0ΩxΩyπ2
[β0
(α0 ln r + 1
2 β0
)+(β2
0 − 12 α
20
) z2
r2
].
(10.127)
In the case where Ωx = Ωy = Ω, this equation simplifies to
E⊥ =µ0Ω2
2π2
[2α2
0 ln2 r − β20 +
(3α2
0 − β20
) z2
r2
]. (10.128)
§10.7.1 deWit twist dislocation current and charge density
The current density four-vector is calculated from (4.10), viz.
jν =ϕ0
µ0
2µ0 + λ0
2µ0ε;ν =
ϕ0
2µ0α0ε;ν

172 Chapter 10 Disclinations in the Spacetime Continuum
and the charge density from (4.14), viz.
% =1
2ϕ0ε0c
2µ0 + λ0
2µ0
√ε;νε;ν =
ϕ0ε0c
4α0
√ε;νε;ν
where ϕ0 is the spacetime continuum electromagnetic shearing potentialconstant.
Using the expression for ε from (10.118), the non-zero componentsof the current density are given by
jx = − ϕ0
2πµ0
Ωxzr2 − 2xz (Ωxx+ Ωyy)
r4
jy = − ϕ0
2πµ0
Ωyzr2 − 2yz (Ωxx+ Ωyy)
r4
jz = − ϕ0
2πµ0
Ωxx+ Ωyy
r2
(10.129)
where r2 = x2 + y2. The charge density is given by
% = ± 1
4πϕ0ε0c
1
r2
√(Ω2x + Ω2
y
)z2 + (Ωxx+ Ωyy)
2. (10.130)
The sign depends on the problem under consideration.It is interesting to note that the charge density for the previous dis-
locations and disclinations considered (edge dislocation (9.105), deWitdislocation line (9.148), wedge disclination (10.110)) all have the samefunctional dependence:
% = ± 1
4πϕ0ε0c
f(bν ,Ων)
r2, (10.131)
while the charge density for the twist disclination (10.130) also includescoordinates xν in f(bν ,Ων , xν).

Chapter 11
Field Theory of Defects
§11.1 Analysis of distributions of defect densities
In this chapter, we deal with distributions of defect densities, namelydislocation densities and disclination densities. We first consider thetreatment of defect densities based on the tensor methods of defectsanalysis [61,62,149].
We then provide an overview of the gauge theory and Cartan dif-ferential geometry treatment introduced in the 1980s, also referred toas the field theory of defects. The treatment is based on Kleinert [149]who is a key reference on this topic (as applied to condensed matter).This theory is popular for the investigation of defects in condensed mat-ter physics and in string theory due to the mathematical elegance andpopularity of gauge theories and Cartan differential geometry.
However, it should be noted that, as Kroner [156] (quoted in [151])has pointed out, “[a]lthough the field theory of defects has found manyapplications, the early hope that it could become the basis of a generaltheory of plasticity has not been fulfilled”.
§11.2 Dislocation and disclination densities
Dislocation and disclination densities are functions of position and aredenoted as αµν(xξ) and θµν(xξ) respectively. More specifically, they aredefined by [61,62,149]
αµν(xξ) = εµστuν ;στ (xξ)
θµν(xξ) = εµστων ;στ (xξ)(11.1)
respectively, where uν is the displacement vector and ων is the rotationvector. For a defect line along L, (11.1) becomes
αµν(xξ) = δµ(L) (bν − Ωντxτ )
θµν(xξ) = δµ(L) Ων(11.2)
respectively, where bν is the Burgers vector and Ων is the Frank vectordefined as per (10.3), and the defect line L has a core discontinuity in

174 Chapter 11 Field Theory of Defects
the displacement and rotation fields, represented by the delta functionδ(L) (see also (10.4) and subsequent equation). If the disclination axisis passing through x0
τ , then the top equation (11.2) is given by
αµν(xξ) = δµ(L)(bν − εστνΩσ(xτ − x0
τ )). (11.3)
Lazar [162] has proposed an approach to avoid the core discontinuityfor a straight twist disclination in the field theory of elastoplasticity.
For dislocation density tensor αµν , the diagonal elements correspondto screw components, while off-diagonal components correspond to edgecomponents. For disclination density tensor θµν , the diagonal elementscorrespond to wedge components, while off-diagonal components corre-spond to twist components [60]. These defect density tensors satisfy theconservation laws [149]
αµν ;µ = −ενστθστ
θµν ;µ = 0 .(11.4)
In the following sections of this chapter, we will see how these defectdensity tensors impact the geometric properties of the spacetime con-tinuum.
§11.3 Defect densities in continua
The dislocation and disclination density tensors αµν and θµν can bewritten in terms of the defect strain and defect bend-twist tensors as [62]
αµν = −εµστ(/ετν
;σ + ετνλ/κσλ
)θµν = −εµστ/κτ ν ;σ .
(11.5)
The incompatibility tensor is given by [91, p. 124] [62]
ıµν = 12 (εµστατ
ν;σ + ενστατ
µ;σ) (11.6)
where ıµν is symmetric over the indices (µν).The contortion Kµν and bend-twist κµν tensors are expressed in
terms of the dislocation density tensor αµν and the disclination densitytensor θµν as follows [61]:
Kνµ = −αµν + 12 δ
µναλλ (11.7)
θµν − 12 δ
µνθλλ = −εµαβ (/κνβ;α − /καβ ;ν) . (11.8)

§11.4 Differential geometry of defects 175
where /κµν is the defect bend-twist tensor. The inverse relation is givenby
αµν = −Kνµ + δµνKλλ . (11.9)
§11.4 Differential geometry of defects
As pointed out by Kleinert, “[a] crystal filled with dislocations anddisclinations turns out to have the same geometric properties as anaffine space with torsion and curvature, respectively” [149, p. 1333]. Wefollow the development of Kleinert [149, see part IV, chapter 2] in thissection.
To properly deal with rotational deformations in the spacetime con-tinuum, we need to add torsion to the differential geometry of generalrelativity which deals only with curvature. As we saw previously insection §11.1, this means that certain tensors are introduced, which arezero in the absence of torsion, in particular the torsion tensor Sµν
λ
defined bySµν
λ = 12
(Γµν
λ − Γνµλ), (11.10)
which is the antisymmetric part of the connection Γµνλ and which trans-
forms like a proper tensor.The connection can then be decomposed into a Christoffel part and
the contortion tensor. Defining the modified connection Γµνλ accordingto
Γµνλ = Γµντgτλ , (11.11)
the modified connection is written as
Γµνλ = µν, λ+Kµνλ (11.12)
where µν, λ is the Christoffel symbol of the first kind and Kµνλ is thecontortion tensor defined as
Kµνλ = Sµνλ − Sνλµ + Sλµν (11.13)
and Sµνλ = Sµντgτλ. Kµνλ is antisymmetric in the last two indices.
The curvature tensor Rµνστ is still given by
Rµνστ = ∂µΓνστ − ∂νΓµσ
τ + ΓµσκΓνκ
τ − ΓνσκΓµκ
τ . (11.14)
However, it is important to note that the connection is given by (11.12),using (11.11), and includes the contortion tensor in addition to theChristoffel symbol. The curvature tensor of general relativity uses onlythe Christoffel symbol, without the contortion tensor, and is known

176 Chapter 11 Field Theory of Defects
as the Riemann curvature tensor. Spaces with curvature and torsionare known as Riemann-Cartan spaces, while spaces with no torsion areknown as Riemann spaces [149].
We consider the metric tensor of (1.7) for small displacements inMinkowski spacetime:
gµν = ηµν + ∂µuν + ∂νuµ . (11.15)
Then the connection, torsion tensor and curvature tensor are given by[149, p. 1359]
Γµνλ = ∂µ∂νuλ
Sµνλ = 12 (∂µ∂ν − ∂ν∂µ)uλ
Rµνκλ = (∂µ∂ν − ∂ν∂µ) ∂κuλ
(11.16)
respectively. The Einstein tensor is given by [149, p. 1360]
Gµν = 14 eγ
νκλeµγστRκλστ (11.17)
where the Levi-Civita pseudo-tensor eµνστ is the covariant version ofthe Levi-Civita pseudo-tensor εµνστ given by
eµνστ =√−g εµνστ (11.18)
and√−g is the positive determinant of −gµν . Note also that
eµνστ =1√−g
εµνστ . (11.19)
We note that the curvature tensor is that of Riemann-Cartan spaces.The dislocation density tensor is related to the torsion tensor ac-
cording toαµν = εµ
κλΓκλν = εµκλSκλν (11.20)
and from (11.12), to the contortion tensor according to
αµν = εµκλKκλν . (11.21)
Nye’s contortion tensor of rank two is obtained from the contortiontensor using
Kµν = 12 Kµκλε
κλν (11.22)
and substituting into (11.21), we obtain
αµν = −Kνµ + δµνKλλ (11.23)

§11.5 Conclusion 177
as before (see (11.9)). Nye’s contortion tensor can also be written interms of the displacement and rotation fields as
Kµν = ∂µων − ενστ∂σuτµ . (11.24)
The disclination density tensor is related to the Einstein tensor of(11.17)
θµν = Gµν (11.25)
while the incompatibility tensor, also known as the defect density tensor(dislocations and disclinations), is related to the Einstein tensor formedfrom the Riemannian curvature tensor (no torsion), which we denotewith a flat diacritical mark, as follows
ıµν = Gµν . (11.26)
§11.5 Conclusion
This chapter provides a brief introduction to the field theory of defects.As mentioned in section §8.1, using defect density distributions resultsin field equations using the methods of differential geometry which areamenable to gauge theories. The modern theoretical descriptions, usedmostly in condensed matter physics, are mostly in terms of gauge the-ory and differential geometry, using continuous distributions of defectdensities (see for example [149]). At this time, STCED does not usedistributions of defect densities, although its future use is not precluded,and this chapter has been presented for completeness to allow readers toposition research papers in the theoretical framework of defect theory.
It is of particular interest to note that the introduction of small dis-placements in Minkowski spacetime results in the introduction of theinfinitesimal strain tensor in the metric, as seen in (11.15). Of par-ticular interest also is that the dislocation density tensor is related tothe torsion tensor while the disclination density tensor is related to theEinstein tensor. Finally, the incompatibility tensor, also known as thedefect density tensor that includes both dislocations and disclinations,is related to the Einstein tensor formed from the Riemannian curvaturetensor as evidenced in (11.26). This leads us again to the differentialgeometry of the General Theory of Relativity and shows the close rela-tionship between STCED and GTR.

178

Chapter 12
Wave-Particle Duality in STCED
§12.1 Wave-particle duality in electromagnetism
In this chapter, we concentrate on the built-in wave-particle duality thatis present in STCED. We first consider the simpler case of electromag-netism, in particular the photon wavefunction, and then generalize theresult to STCED in general.
In electromagnetism, as shown in §5.3.1, the volume dilatation isgiven by ε = 0. Hence, the photon is massless and there is no longitudi-nal mode of propagation. Electromagnetic waves are massless transversedistortion waves.
Photons correspond to an energy flow along the direction of propa-gation in 3-space resulting from the Poynting vector. This longitudinalelectromagnetic energy flux is massless as it is due to distortion, notdilatation, of the spacetime continuum. However, because this energyflux is along the direction of propagation, it gives rise to the particleaspect of the electromagnetic field, the photon, even though the photonis not a particle.
We should note that the modern understanding of photons is thatthey are massless excitations of the quantized electromagnetic field, notparticles per se. Thus in this case, the kinetic energy in the longitudinaldirection is carried by the distortion part of the deformation, while thedilatation part, which carries the rest-mass energy, is not present asthe mass is 0. This result is thus in agreement with orthodox quantumelectrodynamics.
This situation provides us with an opportunity to investigate thetransverse mode of propagation, independently of the longitudinal mo-de. In general, the transverse propagation of electromagnetic waves isgiven by sinusoidal waves ψ and the intensity of the waves, correspond-ing to the energy density, is given by |ψ|2. This is equivalent to themodulus squared of the wavefunction used in quantum mechanics as aprobability density. A full analysis requires that we investigate furtherthe quantum mechanics of the photon, and in particular, the photonwavefunction.

180 Chapter 12 Wave-Particle Duality in STCED
§12.2 Photon wavefunction
The photon wavefunction is a first quantization description of the elec-tromagnetic field [29, 42]. Historically, this development was not done,as second quantization of the electromagnetic field was first developed.As a result, photon wave mechanics is not fully accepted in the scientificcommunity, mainly because of the differences between particle and pho-ton dynamics. As opposed to a particle, the photon has zero rest-massand propagates at the speed of light. In addition, the position operatorcannot be defined for a photon, only the momentum operator (knownas the photon localization problem).
Bialynicki-Birula [29–33], Sipe [244], and more recently Mohr [194],Raymer and Smith [223–225] and others have derived and promotedthe use of the photon wavefunction. Bialynicki-Birula defines the pho-ton wavefunction as “a complex vector-function of space coordinatesr and time t that adequately describes the quantum state of a singlephoton” [29]. He sees three advantages to introducing a photon wave-function [32]: it provides 1) a unified description of both massive andmassless particles both in first quantization and second quantization;2) an easier description of photon dynamics without having to resort tosecond quantization; 3) new methods of describing photons.
As pointed out in [42] and references therein, the photon wave equa-tion is now used to study the propagation of photons in media, thequantum properties of electromagnetic waves in structured media, andthe scattering of electromagnetic waves in both isotropic and anisotropicinhomogeneous media. Raymer and Smith [224,225] have extended theuse of the photon wavefunction to the analysis of multi-photon statesand coherence theory. To the above list, in this book, we add an ad-ditional benefit of the photon wavefunction: the clarification of thephysical interpretation of the quantum mechanical wavefunction [186].
The photon wavefunction is derived from the description of the elec-tromagnetic field based on the complex form of the Maxwell equa-tions first used by Riemann, Silberstein and Bateman [29] (the Rie-mann–Silberstein vector). As summarized by Bialynicki-Birula [33],“[t]he Riemann–Silberstein vector on the one hand contains full infor-mation about the state of the classical electromagnetic field and on theother hand it may serve as the photon wave function in the quantumtheory”. The Maxwell equations are then written as [29]
i ∂tF(r, t) = c∇× F(r, t)
∇ · F(r, t) = 0(12.1)

§12.3 Photon wavefunction physical interpretation 181
where
F(r, t) =
(D(r, t)√
2ε0+ i
B(r, t)√2µ0R
)(12.2)
and where D(r, t) and B(r, t) have their usual significance.Then the dynamical quantities like the energy density and the Poynt-
ing vector are given by [29]
E =
∫F∗ · F d3r
S =1
2ic
∫F∗ × F d3r
(12.3)
where F∗ denotes the complex conjugate. The sign selected in (12.2)reflects positive helicity (projection of the spin on the direction of mo-mentum) corresponding to left-handed circular polarization. Photons ofnegative helicity corresponding to right-handed circular polarization arerepresented by changing the sign from i to −i in (12.2). Hence (12.2)can be written as
F±(r, t) =
(D(r, t)√
2ε0± i B(r, t)√
2µ0
)(12.4)
to represent both photon polarization states.A photon of arbitrary polarization is thus represented by a combina-
tion of left- and right-handed circular polarization states. The photonwavefunction is then given by the six-component vector
Ψ(r, t) =
(F+(r, t)F−(r, t)
). (12.5)
The corresponding photon wave equation is discussed in [32].
§12.3 Physical interpretation of the photon wavefunction
From (12.5) and (12.4), we calculate the modulus squared of the photonwavefunction to obtain [42]
|Ψ(r, t)|2 =
(ε0|E|2
2+|B|2
2µ0
). (12.6)
The modulus squared of the photon wavefunction Ψ(r, t) gives the elec-tromagnetic energy density at a given position and time. This is thephysical interpretation of the quantum mechanical |Ψ(r, t)|2 for electro-magnetic transverse waves in the absence of longitudinal waves.

182 Chapter 12 Wave-Particle Duality in STCED
Bialynicki-Birula proposes to convert |Ψ(r, t)|2 to a probability den-sity as required by the accepted quantum mechanical probabilistic inter-pretation [32]. This he achieves by dividing the modulus squared of thephoton wavefunction by the expectation value of the energy <E> [32,see his equation (44)]. In this way, it is made to describe in probabilisticterms the energy distribution in space associated with a photon.
Thus the probabilistic formulation of quantum theory is preserved,while the physical interpretation of |Ψ|2 is shown to correspond to an en-ergy density. Raymer and Smith [225] state that “[a] strong argument infavour of the energy-density wave function form of PWM [Photon WaveMechanics] is that it bears strong connections to other, well-establishedtheories—both quantum and classical—such as photodetection theory,classical and quantum optical coherence theory, and the biphoton am-plitude, which is used in most discussions of spontaneous parametricdown conversion”.
Hence, we have to conclude that the appropriate physical interpre-tation of |Ψ|2 is that it represents a physical energy density, not a prob-ability density. However, the energy density can be converted to aprobability density once it is normalized with the system energy (asdone by Bialynicki-Birula for the photon wavefunction). In this way,STCED does not replace the probabilistic formulation of quantum the-ory, it just helps to understand the physics of quantum theory. Thetwo formulations are equivalent, which explains the success of the prob-abilistic formulation of quantum theory. In actual practice, the quan-tum mechanical probability formulation can be used as is, as it givesthe same results as the physical energy density formulation of STCED.However, the physical intensity waves of STCED help us understandthe physics of the quantum mechanical wavefunction and the physics ofwave-particle duality.
It is important to note that the energy density physical interpreta-tion of |Ψ|2 applies just as much to systems as to single particles, as forthe probability density interpretation.
§12.4 Wave-particle duality in STCED
In STCED, the displacement uν of a deformation from its undeformedstate can be decomposed into a longitudinal (dilatation) component uν‖and a transverse (distortion) component uν⊥. The volume dilatation εis given by the relation [180, see (44)]
ε = uµ;µ ≡ u‖µ;µ. (12.7)

§12.4 Wave-particle duality in STCED 183
The longitudinal displacement wave equation and the transverse dis-placement wave equation of a deformation are given respectively by(see §7.2)
∇2uν‖ = − µ0 + λ0
µ0ε;ν
∇2uν⊥ +k0
µ0ε (xµ) uν⊥ = 0
(12.8)
where ∇2 is the four-dimensional operator, λ0 and µ0 are the Lameelastic constants of the spacetime continuum and k0 is the elastic forceconstant of the spacetime continuum. The constant µ0 is the shear mod-ulus (the resistance of the continuum to distortions) and λ0 is expressedin terms of κ0, the bulk modulus (as in section §2.1) according to
λ0 = κ0 − µ0/2 (12.9)
in a four-dimensional continuum. The wave equation for uν‖ describesthe propagation of longitudinal displacements, while the wave equa-tion for uν⊥ describes the propagation of transverse displacements in thespacetime continuum. The STCED deformation wave displacementssolution is similar to Louis de Broglie’s “double solution” [57,58].
§12.4.1 Wave propagation in STCED
The electromagnetic case, as seen in section §12.1, provides a physicalinterpretation of the wavefunction for transverse wave displacements.This interpretation should apply in general to any wavefunction Ψ. InSTCED, in the general case, every deformation can be decomposed intoa combination of a transverse mode corresponding to the wave aspect ofthe deformation, and a longitudinal mode corresponding to the particleaspect of the deformation [181]. Thus the physical interpretation of sec-tion §12.3 applies to the general STCED transverse wave displacements,not only to the electromagnetic ones.
Hence, |Ψ|2 represents the physical intensity (energy density) ofthe transverse (distortion) wave, rather than the probability densityof quantum theory. It corresponds to the transverse field energy of thedeformation. It is not the same as the particle, which corresponds tothe longitudinal (dilatation) wave displacement and is localized withinthe deformation via the massive volume dilatation, as discussed in thenext section §12.4.2. However, |Ψ|2 can be normalized with the systemenergy and converted into a probability density, thus allowing the use ofthe existing probabilistic formulation of quantum theory. Additionally,

184 Chapter 12 Wave-Particle Duality in STCED
the physical intensity waves of STCED help us understand the physicsof wave-particle duality and resolve the paradoxes of quantum theory.
§12.4.2 Particle propagation in STCED
Particles propagate in the spacetime continuum as longitudinal wavedisplacements. Mass is proportional to the volume dilatation ε of thelongitudinal mode of the deformation as per (2.24). This longitudinalmode displacement satisfies a wave equation for ε, different from thetransverse mode displacement wave equation for Ψ. This longitudinaldilatation wave equation for ε is given by [180, see (204)]
∇2ε = − k0
2µ0 + λ0uν⊥ε;ν . (12.10)
It is important to note that the inhomogeneous term on the R.H.S.includes a dot product coupling between the transverse displacementuν⊥ and the gradient of the volume dilatation ε;ν for the solution of thelongitudinal dilatation wave equation for ε. This explains the behaviorof electrons in the double slit interference experiment.
The transverse distortion wave equation for ωµν [180, see (210)]
∇2ωµν +k0
µ0ε (xµ) ωµν =
1
2
k0
µ0(ε;µuν⊥ − ε;νuµ⊥) (12.11)
shows a R.H.S. cross product coupling between the transverse displace-ment uν⊥ and the gradient of the volume dilatation ε;µ for the solutionof the transverse distortion wave equation for ωµν . The transverse dis-tortion wave ωµν corresponds to a multi-component wavefunction Ψ.
A deformation propagating in the spacetime continuum consists ofa combination of a transverse and a longitudinal wave. The transversewave is the source of the interference pattern in double slit experiments,which impacts the location of the associated longitudinal wave of theindividual particle in generating the interference pattern. The longitu-dinal dilatation wave behaves as a particle and goes through one of theslits, even as it follows the interference pattern dictated by the trans-verse distortion wave, as observed experimentally [117, see in particularFigure 4] and as seen in the coupling between ε;ν and uν⊥ in (12.10) and(12.11) above.
These results are in agreement with the results of the Janossy-Naray,Clauser, and Dagenais and Mandel experiments on the self-interferenceof photons and the neutron interferometry experiments performed byBonse and Rauch [238, see pp. 73-81]. The transverse distortion wave

§12.4 Wave-particle duality in STCED 185
generates the interference pattern, while the longitudinal wave’s dilata-tion (particle) follows a specific action, with its final location guided bythe transverse wave’s interference pattern.
The longitudinal wave is similar to the de Broglie “singularity-wavefunction” [57]. However, in STCED the particle is not a singularity ofthe wave, but is instead characterized by its mass which arises from thevolume dilatation propagating as part of the longitudinal wave. Thereis no need for the collapse of the wavefunction Ψ, as the particle residesin the longitudinal wave, not the transverse one. A measurement of aparticle’s position is a measurement of the longitudinal wave, not thetransverse wave.

186

Chapter 13
Wavefunctions, Operators andMeasurements
§13.1 The mathematics of wavefunctions
In this chapter, we will review the mathematics and physics of quantumtheory to be in a better position to analyze the theory and clarify itsphysical nature within STCED in the following chapters. One will oftenhear physicists say that quantum mechanics is difficult to understandas it is not intuitive. However, as the saying goes, “ce qui se concoitbien s’enonce clairement”, i.e. “that which is well understood is clearlyexplained”.
To understand quantum mechanics, one must understand the math-ematics that underlie the theory. We will not start by jumping in themiddle of the mathematics as is done in most textbooks, as this justconfuses the situation. Instead, we will start with the basic mathemat-ical concepts and see how they pertain to the mathematics of quantumtheory to be better able to understand the physics, and interpretation,of quantum physics. We will eventually get into the more arcane aspectsof the theory, but first, we have to start at the beginning.
A point P3 in three dimensions is specified by numbers along threemutually independent axes, such as the cartesian coordinates (x, y, z),that span (cover) the three-dimensional space. The cartesian axes are
characterized by three vectors~i,~j,~k that are usually normalized to 1 toprovide three unit vectors i, j, k. Their mutual independence is shownby their (dot) products being equal to zero: i · j = 0, j · k = 0 and
k · i = 0 which shows that the unit vectors are orthogonal (orthonormalto be exact).
The coordinates of the point can then be written as
P3 = xi+ yj + zk . (13.1)
This is known as a vector space. Mathematicians have other conditionsthat they impose on the vector space, but these are the basic concepts.The three-dimensional vector space can be extended to an n-dimensionalvector space using
Pn =
n∑m=1
xmim (13.2)

188 Chapter 13 Wavefunctions, Operators and Measurements
where im are the n unit vectors spanning the n-dimensional vector spaceand the xm are the coordinate values along the axes spanning the vectorspace that describes the point Pn. This is very basic mathematics, but itis highly relevant to understanding the mathematical theory of quantummechanics.
At the end of the nineteenth century, mathematicians, includingDavid Hilbert, noticed that orthogonal sets of basis functions gm(x)could also be obtained in connection with Sturm-Liouville problems(related to certain types of differential equations) that had the sameproperties as vector spaces, including [155]
– product of basis functions
(gm, gn) =
∫ b
a
gm(x)gn(x)dx ; (13.3)
– norm (“length”) of a basis function
‖gm‖2 =
∫ b
a
g2m(x)dx ; (13.4)
– orthogonality of the set of, in this case orthonormal, basis func-tions where their norm is equal to one
(gm, gn) = δmn ; (13.5)
– representation of an arbitrary function f(x) in terms of the basisfunctions gm(x)
f(x) =∑m
cmgm(x) where
(f, gm) = cm‖gm‖2.(13.6)
This is known as a function space.In particular, quantum mechanics uses a function space known as a
Hilbert space, where the (inner) product is defined as
<f, g> =
∫ ∞−∞
f(x)g(x)dx . (13.7)
More specifically, a complex Hilbert space is used in quantum theory,meaning that the functions are complex functions, not just real func-tions. It is important to note that the complex Hilbert space is a math-ematical space spanned (covered) by a set of orthogonal basis functions.

§13.1 The mathematics of wavefunctions 189
Any function in that mathematical space can be expressed as a com-bination of the set of orthogonal basis functions as (13.6), where thecoefficients cm are themselves complex functions of the coordinates.
This is, in a nutshell, the mathematical basis of quantum theory, aslaid out by mathematician von Neumann in the 1930s [270]. In quantummechanics, the Hilbert space is known as the state space, and the setof basis functions are known as state vectors. General system states(wavefunctions) are combinations of the state vectors similar to (13.6)in the mathematical state space. The coefficients of (13.6) are expressedas probability amplitudes.
Some may consider this to be an oversimplification of the mathe-matical theory, but at this time, this is sufficient for our purpose aswe are pushing back the foliage to have a better view at the physicsand interpretation of the theory. We have not looked at other aspectsof quantum mechanics such as operators as these are embellishmentsof the theory that are not required for our current discussion of thequantum physics fundamentals. We will look at those in due time.
Everything we have looked at till now makes sense and is a very rea-sonable approach to the analysis of quantum physics. Quantum physicsneeds to be based on probabilistic analysis as we, at our level, are notcurrently in a position to analyze the quantum physics at that level tothe same degree that we can at the macroscopic level, although this doesnot preclude being able to do so in the future as our physical theoriesimprove further.
This mathematical theory provides an elegant mean of carrying cal-culations on quantum physical systems, as is evidenced by the calcula-tional success of quantum theory. However, problems are encounteredin the interpretation of the theory which is taken too literally. The basicsource of the problem is that the mathematical Hilbert space is takento be a physical space, and the wavefunction written as for example(13.6) is taken to represent a physical system state that is a combina-tion of state vectors that exists in a limbo state until it is measured (i.e.observed). At that point, the wavefunction “collapses” into one of thestates that is measured. This is an interpretation of the mathematicsthat is not required and that really belongs into metaphysics. Inter-pretations based on giving physical reality to the Hilbert mathematicalspace are philosophical musings at best.
The justification for this interpretation is usually ascribed to theindeterminacy of the quantum world resulting from, among other rea-sons, the Heisenberg Uncertainty Principle and, since the 1960s, to Bell’stheorem [15]. As shown in [179], the Heisenberg Uncertainty Principle

190 Chapter 13 Wavefunctions, Operators and Measurements
arises because of the dependency of momentum on wave number thatexists at the quantum level. Quantum mechanical conjugate variablesare Fourier transform pairs of variables. It is important to differentiatebetween the measurement limitations that arise from the properties ofFourier transform pairs, and any inherent limitations that may or maynot exist for those same variables independently of the measurementprocess. Quantum theory currently assumes that the inherent limita-tions are the same as the measurement limitations. As shown in [179],quantum measurement limitations affect our perception of the quantumenvironment only, and are not inherent limitations of the quantum level.Bell’s theorem will be considered in greater detail in section §13.3.
Independently of this analysis, when systems are “prepared”, theyend up being in definite physical states, not limbo states. These statesobey the STCED wave equations, which can include entangled states aswe will see in section §18.6. When a component of an entangled stateis measured, one does not see superluminal communication between theentangled states, but rather one measures the states that the systemwas initially prepared in, and the probability analysis needs to be basedon mathematical probability theory and Bayesian analysis, i.e. condi-tional probabilities, as clearly demonstrated by Jaynes [141–143]. Whatchanges instantaneously is our state of knowledge of the system, not thesystem itself. Certainly, there is evidence of nonlocality of field theoriesat the quantum level, as covered further for STCED in section §18.5,but there is a large degree of separation between the nonlocality conceptand the wavefunction “collapse” concept.
The latter leads to concepts such as Schrodinger’s cat where, givena proper experimental setup, an unobserved cat is in a half-alive orhalf-dead physical state depending on whether a random event has hap-pened or not. When an observer checks on the cat, the wavefunction“collapses” and the cat is found either dead or alive. This is empty phi-losophy, taken to its reductio ad absurdum limit. If the random eventoccurs, the cat will die, and we will eventually find out from the smell– no need for an observer to “collapse” the wavefunction! Or is it thesmell acting as surrogate observer that “collapses” the wavefunction?
We see questions asked such as whether there is a sound generated ifa tree crashes in a forest with no observer to hear the sound. Of course, aphysical analysis of the problem shows that sound energy is still emittedin the audible range, whether there is an observer present to hear it ornot. This example is an evident one, but there is much confusion thatarises from this concept that is flowing in the undercurrents of modernphysics research. For example, a search for “wavefunction collapse”

§13.2 Wavefunctions and operators 191
(and “wave function collapse”) in the arXiv archive paper titles resultsin more than 120 papers. This is a modern equivalent of the middleages question on the number of angels that can dance on the head of apin. The need for an observer to force the wavefunction to “collapse” isa modern version of anthropocentrism, i.e. human-centric philosophy.
§13.2 Wavefunctions and operators
Now that we have a better perspective on the mathematical formalism ofquantum mechanics and its interpretation difficulties, we will considerthe physical underpinnings of quantum theory to better understandquantum physics and its interpretation.
In the previous section §13.1, we have used the probabilistic inter-pretation of the wavefunction to discuss its physical reality. As we haveseen in section §12.3 on the physical interpretation of the photon wave-function, the probabilistic use of the wavefunction is valid provided thatit is normalized as discussed in that section. The modulus squared ofthe photon wavefunction Ψ(r, t) given by (12.6) corresponds to the elec-tromagnetic energy density at a given position and time. It is convertedto a probability density by dividing the modulus squared of the photonwavefunction by the system energy [32].
These results were derived using the wavefunction of the simpler andbetter understood electromagnetic field photon. As we saw in §12.4.1,in the general STCED case, |Ψ|2 represents the physical intensity (en-ergy density) of the transverse (distortion) wave, corresponding to thetransverse field energy of the deformation. |Ψ|2 can be normalized withthe system energy and converted into a probability density, thus allow-ing the use of the existing probabilistic formulation of quantum theory.This we now cover in greater detail.
In particular, wavefunctions are the solution of quantum mechanicalwave equations. They are thus wave solutions, which we call wavefunc-tions, also known as kets |ψ> in the Dirac formalism. As the modulussquared of the wavefunction |ψ|2 corresponds to the energy density ofthe wavefunction as mentioned previously, this means that the integralover the volume V is the system energy. It is calculated from
E =
∫ ∞−∞|ψ|2 dV =
∫ ∞−∞
ψ∗ψ dV , (13.8)
where ψ∗ denotes complex conjugation. In quantum mechanics, this isalso written as <ψ|ψ> using Dirac notation, and is used as normaliza-tion factor which, in addition to ensuring that the wavefunctions are

192 Chapter 13 Wavefunctions, Operators and Measurements
orthonormal, also unwittingly converts |ψ|2 from an energy density toa probability density.
As seen in section §13.1 and in this section, quantum mechanicsis couched in its own formalism and terminology, although it is usingstandard mathematical theory. A good part of this is due to its historicaldevelopment where a formalism different from the mathematical one,and a terminology that reflected a certain physical picture of what wasperceived as the explanation of the new theory were adopted.
The formalism and terminology has gradually become more formal-ized and less physical in its understanding of the theory. One only needsto look at textbooks, such as [218,222] from the 1960s with its empha-sis on wave packets and wave mechanics and [8] from the late 1990swith its formal presentation of the theory and absence of wave packetsor wave mechanics concepts. The axiomatization of quantum mechan-ics has resulted in a theory steeped in its own mathematical formalismdisconnected from physical reality, reinforced by the mysterious auraprojected by the current interpretation of the theory.
The calculation of observables using operators is a case in point. Forexample, [8, see p. 43] states
To each dynamical variable (physical concept) there correspondsa linear operator (mathematical object), and the possible valuesof the dynamical variable are the eigenvalues of the operator.[emphasis in original]
and later states that operators correspond to observables. This is cal-culated from Obs = <ψ|Op|ψ> using Dirac notation. Mathematically,this is derived from the expectation value of variable X which is givenby
<X> =
∫∞−∞ ψ∗X ψ dV∫∞−∞ ψ∗ψ dV
(13.9)
where <X> can be measured experimentally.
The momentum and energy operators, −i~ ~∇ and i~ ∂/∂t respec-tively, give rise to questions on their nature and is best understood as aresult of the relationship between momentum ~p and wave vector ~k at thequantum level [179]. Starting with the wavefunction of a free particlein one dimension
ψ(x, t) = A exp i(kxx− ωt+ ϕ) (13.10)
where A is the amplitude and ϕ is a phase factor, and taking the partial

§13.3 EPR paradox and Bell’s inequality 193
derivative with respect to x, we have
∂
∂xψ(x, t) = ikxA exp i(kxx− ωt+ ϕ) = i
px~ψ(x, t) , (13.11)
and hence the operator for px operating on the wavefunction is givenby
Op(px) = −i~ ∂
∂x. (13.12)
Similarly, by partial differentiation of (13.10) with respect to t, we ob-tain the operator for E operating on the wavefunction given by
Op(E) = i~∂
∂t. (13.13)
Mathematically, observables are nothing more than the expectationvalue of a variable (that is called an operator) of a function named ψthe wavefunction. The requirement that the operator be hermitian, etccomes from the mathematics. Hence this aspect of quantum theory iscouched in terminology and interpretation that is not required by themathematical theory or the physical nature of the process.
§13.3 The EPR paradox and Bell’s inequality
Bell’s inequality [15,109,111,114] sets constraints for the existence of lo-cal hidden variable theories in quantum mechanics. Bohr, of the Copen-hagen probabilistic school, and Einstein, of the objective reality school,who both contributed to the foundation of quantum mechanics, did notagree on its interpretation – their views and correspondence on the topicare well documented in many books [126,176,248,277].
In 1935, Einstein, Podolsky and Rosen published a paper [80] thataimed to show that quantum mechanics was not a complete descriptionof physical reality. Bohr provided a response to the challenge [22], butthe EPR paper remained an argument for hidden variables in quan-tum mechanics. In 1964, Bell [15] published an inequality that imposedconstraints for local hidden variable theories to be valid in quantummechanics. The experiments performed by Aspect et al [5] with en-tangled photons confirmed that Bell’s inequality was violated withinexperimental errors, taken to mean that local hidden variable theoriesare not valid in quantum mechanics. Only non-local hidden variabletheories are possible, based on these results.
In this section, we investigate the applicability of Bell’s inequality,based on the assumptions used in its derivation.

194 Chapter 13 Wavefunctions, Operators and Measurements
§13.3.1 Bell’s inequality
Bell’s derivation [15] considers a pair of spin one-half particles of spinσ1 and σ2 respectively, formed in the singlet state, and moving freely inopposite directions. Then σ1 · a is the measurement of the componentof σ1 along some vector a, and similarly for σ2 · b along some vector b.Bell then considers the possibility of a more complete description usinghidden variable parameters λ.
He writes down the following equation for the expectation value ofthe product of the two components σ1 · a and σ2 · b with parameters λ:
P (a,b) =
∫dλ ρ(λ)A(a, λ)B(b, λ) (13.14)
whereA(a, λ) = ±1 and B(b, λ) = ±1 (13.15)
and ρ(λ) is the probability distribution of parameter λ. This shouldequal the quantum mechanical expectation value
<σ1 · a σ2 · b> = −a · b . (13.16)
Bell says that it does not matter whether λ is “a single variable or aset, or even a set of functions, and whether the variables are discrete orcontinuous” [15]. He uses a single continuous parameter described bya probability distribution. In a later paragraph, he states that (13.14)represents all kinds of possibilities, such as any number of hidden vari-ables, two sets of hidden variables dependent on A and B, or even asinitial values of the variables λ at a given time if one wants to assign“dynamical significance and laws of motion” [15] to it. However, it isdoubtful that the probability distribution ρ(λ) can be used to representall possible theories of hidden variables.
Indeed, the basic limitation of (13.14) with its use of a probabilitydistribution ρ(λ) is that it imposes a quantum mechanical calculationrepresentation on the analysis. Other quantum level dynamic theories,which we will refer to as hidden variable dynamic theories, could obeytotally different dynamic principles, in which case, (13.14) would notbe applicable. Equation (13.14) is only applicable to a specific classof hidden variable theories that can be represented by that equation,which Jaynes [141] refers to as Bell theories. In the following sections,we consider examples of quantum dynamical processes that cannot berepresented by (13.14) or by the probability distribution ρ(λ) used in(13.14).

§13.3 EPR paradox and Bell’s inequality 195
§13.3.2 Measurement limitations and inherent limitations
It is important to note that Bohr’s responses to Einstein’s gedankenexperiments were based on measurements arguments, which acted as abarrier to any further analysis beyond that consideration. As pointedout by Jaynes [142], Einstein and Bohr “were both right in the essentials,but just thinking on different levels. Einstein’s thinking [was] alwayson the ontological level traditional in physics; trying to describe therealities of Nature. Bohr’s thinking [was] always on the epistemologicallevel, describing not reality but only our information about reality”.
As discussed in [179], the Heisenberg Uncertainty Principle arises be-cause x and p form a Fourier transform pair of variables at the quantumlevel due to the momentum p of a quantum particle being proportionalto the de Broglie wave number k of the particle. It is a characteristicof quantum mechanics that conjugate variables are Fourier transformpairs of variables.
It is thus important to differentiate between the measurement limita-tions that arise from the properties of Fourier transform pairs, and anyinherent limitations that may or may not exist at the quantum level forthose same variables, independently of the measurement process. Con-jugate variable measurement limitations affect how we perceive quantumlevel events as those can only be perceived by instrumented measure-ments at that level. However, as shown in [179], conjugate variablemeasurement limitations affect only our perception of the quantum en-vironment, and are not inherent limitations of the quantum level as seenin the following.
The properties of Fourier transform pairs are the same at all scales,from the microscopic to the macroscopic. We know from experience inother applications that our measurement limitations do not representan inherent limitation on the measured quantities in Fourier Transformtheory. For example, in Digital Signal Processing, a signal is continuouseven though our measurement of the signal results in discrete and aliasedvalues of limited resolution subject to the Nyquist-Shannon SamplingTheorem (analog and digital representation of the signal). The effectivewidth of the signal and its transform are related by the Uncertaintytheorem. Even though the time and frequency evolution of a signalthat we measure is limited by our measurement limitations, the timedomain and frequency domain signals are both continuous and fullydefined, independently of how we measure them.
The Nyquist-Shannon Sampling Theorem of Fourier transform the-ory allows access to the range of values of variables below the Heisen-

196 Chapter 13 Wavefunctions, Operators and Measurements
berg Uncertainty Principle limit under sampling measurement condi-tions, as demonstrated by the Brillouin zones formulation of solid statephysics [179] [285, see p. 21] [41, see p. 100]. Physically this result can beunderstood from the sampling measurement operation building up themomentum information during the sampling process, up to the Nyquistlimit. This shows that there are local hidden variables at the quan-tum level, independently of the measurement process. The dynamicalprocess in this case is masked by the properties of the Fourier transform.
§13.3.3 Bohmian mechanics and STCED wave-particleduality
In this section we take a second look at wave-particle duality in STCED,in particular with respect to Bohmian mechanics and hidden variablestheory. The Elastodynamics of the Spacetime Continuum (STCED)[180] has similarities to Bohmian mechanics in that the solutions ofthe STCED wave equations are similar to Louis de Broglie’s “doublesolution” [57, 58]. Bohmian mechanics also known as de Broglie-Bohmtheory [70,110,124] is a theory of quantum physics developed by DavidBohm in 1952 [21], based on Louis de Broglie’s original work on thepilot wave, that provides a causal interpretation of quantum mechanics.It is empirically equivalent to orthodox quantum mechanics, but is freeof the conceptual difficulties and the metaphysical aspects that plaguethe interpretation of quantum theory.
Interestingly, Bell was aware of and a proponent of Bohmian me-chanics when he derived his inequality [16]:
Bohm showed explicitly how parameters could indeed be introdu-ced, into nonrelativistic wave mechanics, with the help of whichthe indeterministic description could be transformed into a deter-ministic one. More importantly, in my opinion, the subjectivityof the orthodox version, the necessary reference to the ‘observer,’could be eliminated... I will try to present the essential idea...so compactly, so lucidly, that even some of those who know theywill dislike it may go on reading, rather than set the matter asidefor another day.
In Bohmian mechanics, a system of particles is described by a combi-nation of the wavefunction from Schrodinger’s equation and a guidingequation that specifies the location of the particles. “Thus, in Bohmianmechanics the configuration of a system of particles evolves via a deter-ministic motion choreographed by the wave function” [110] such as inthe two-slit experiment. We will see a similar behaviour in the STCED

§13.3 EPR paradox and Bell’s inequality 197
wave equations below. Bohmian mechanics is equivalent to a non-localhidden variables theory.
In the Elastodynamics of the Spacetime Continuum, as discussedin [186], energy propagates in the spacetime continuum by longitudi-nal (dilatation) and transverse (distortion) wave displacements. Thisprovides a natural explanation for wave-particle duality, with the trans-verse mode corresponding to the wave aspects of the deformations andthe longitudinal mode corresponding to the particle aspects of the de-formations.
The displacement uν of a deformation from its undeformed statecan be decomposed into a longitudinal component uν‖ and a transversecomponent uν⊥. The volume dilatation ε is given by the relation ε =u‖
µ;µ [180]. The wave equation for uν‖ describes the propagation of
longitudinal displacements, while the wave equation for uν⊥ describes thepropagation of transverse displacements in the spacetime continuum.The uν displacement wave equations can be expressed as a longitudinalwave equation for the dilatation ε and a transverse wave equation forthe rotation tensor ωµν [180].
Particles propagate in the spacetime continuum as longitudinal wavedisplacements. Mass is proportional to the volume dilatation ε of thelongitudinal mode of the deformation [180, see (32)]. This longitudinalmode displacement satisfies a wave equation for ε, different from thetransverse mode displacement wave equation for ωµν . This longitudinaldilatation wave equation for ε is given by [180, see (204)]
∇2ε = − k0
2µ0 + λ0uν⊥ε;ν (13.17)
where µ0 and λ0 are the Lame constants and k0 the elastic volumeforce constant of the spacetime continuum. It is important to note thatthe inhomogeneous term on the R.H.S. includes a dot product couplingbetween the transverse displacement and the volume dilatation for thesolution of the longitudinal dilatation wave equation for ε.
The transverse distortion wave equation for ωµν [180, see (210)]
∇2ωµν +k0
µ0ε (xµ) ωµν =
1
2
k0
µ0(ε;µuν⊥ − ε;νuµ⊥) (13.18)
also includes a R.H.S. coupling, in this case a cross product, between thetransverse displacement and the volume dilatation for the solution of thetransverse distortion wave equation for ωµν . The transverse distortionwave ωµν corresponds to a multi-component wavefunction Ψ.

198 Chapter 13 Wavefunctions, Operators and Measurements
A deformation propagating in the spacetime continuum consists ofa combination of longitudinal and transverse waves. The coupling be-tween ε;µ and uν⊥ on the R.H.S. of both wave equations explains the be-havior of electrons in the double slit interference experiment. It showsthat even though the transverse wave is the source of the interferencepattern in double slit experiments, the longitudinal dilatation wave,which behaves as a particle, follows the interference pattern dictated bythe transverse distortion wave as observed experimentally.
The longitudinal dilatation wave behaves as a particle and goesthrough one of the slits, even as it follows the interference pattern dic-tated by the transverse distortion wave, as observed experimentally [117,see in particular Figure 4] and as seen in the coupling between ε;µ anduν⊥ in (13.17) and (13.18) above. This behaviour is the same as that inBohmian mechanics seen above. These results are in agreement with theresults of the Janossy-Naray, Clauser, and Dagenais and Mandel experi-ments on the self-interference of photons and the neutron interferometryexperiments performed by Bonse and Rauch [238, see pp. 73-81].
As mentioned previously, the solutions of the STCED wave equa-tions are similar to Louis de Broglie’s “double solution”. The longitu-dinal wave is similar to the de Broglie “singularity-wave function” [57].In STCED however, the particle is not a singularity of the wave, but isinstead characterized by its mass which arises from the volume dilata-tion propagating as part of the longitudinal wave. There is no need forthe collapse of the wavefunction Ψ, as the particle resides in the lon-gitudinal wave, not the transverse one. A measurement of a particle’sposition is a measurement of the longitudinal wave, not the transversewave.
In addition, |Ψ|2 represents the physical energy density of the trans-verse (distortion) wave. It corresponds to the transverse field energy ofthe deformation. It is not the same as the particle, which corresponds tothe longitudinal (dilatation) wave displacement and is localized withinthe deformation via the massive volume dilatation. However, |Ψ|2 canbe normalized with the system energy and converted into a probabilitydensity, thus allowing the use of the existing probabilistic formulationof quantum theory.
The dynamical process, although it has some similarities to Bohmianmechanics, is also different from it as it is centered on longitudinal(particle) and transverse (wavefunction) wave equations derived fromthe properties of the spacetime continuum of general relativity. It isthus deterministic and causal as is general relativity.

§13.3 EPR paradox and Bell’s inequality 199
§13.3.4 Physical influence versus logical inference
We have considered two examples of quantum dynamical processes whe-re the starting equation (13.14) and the probability distribution ρ(λ)used in (13.14) do not apply to the situation. We now examine in greaterdetails the probabilistic formulation of Bell’s inequality derivation ofsection §13.3.1 to better understand its limitations.
Physicist E. T. Jaynes was one of the pioneers of the usage of prob-ability theory as an extension of deductive logic. His textbook “Prob-ability Theory: The Logic of Science” [143] published posthumously isan invaluable resource for scientists looking to understand the scientificuse of probability theory as opposed to the conventional mathematicalmeasure theory. As he states in [141],
Many circumstances seem mysterious or paradoxical to one whothinks that probabilities are real physical properties existing inNature. But when we adopt the “Bayesian Inference” viewpointof Harold Jeffreys [144,145], paradoxes often become simple plat-itudes and we have a more powerful tool for useful calculations.
Jaynes clarifies this approach to probability theory and contrasts it tofrequencies as follows [141]:
In our system, a probability is a theoretical construct, on the epis-temological level, which we assign in order to represent a state ofknowledge, or that we calculate from other probabilities accord-ing to the rules of probability theory. A frequency is a propertyof the real world, on the ontological level, that we measure orestimate.
The probability distributions used for inference do not describe a prop-erty of the world, only a certain state of information about the world,which provides us with the means to use prior information for analysisas powerfully demonstrated in numerous applications in [141–143].
The Einstein–Podolsky–Rosen (EPR) paradox and Bell inequality inquantum theory is one of the examples examined by Jaynes in [141]. Inquantum mechanics, the belief that probabilities are real physical prop-erties leads to quandaries such as the EPR paradox which lead some toconclude that there is no real world and that physical influences travelfaster than the speed of light, or worse (“a spooky kind of action ata distance” as Einstein called it). As Jaynes points out, it is impor-tant to note that the EPR article did not question the existence of thecorrelations, which were expected, but rather the need for a physicalcausation instead of what he calls “instantaneous psychokinesis”, basedon experimenter decisions, to control distant events.

200 Chapter 13 Wavefunctions, Operators and Measurements
Jaynes’ analysis of the derivation of Bell’s inequality uses the fol-lowing notation for conditional probabilities which corresponds to Bell’snotation as follows:
P (AB | ab) = P (a,b) (13.19)
P (A | aλ) = A(a, λ) , (13.20)
such that Bell’s equation (13.14) above becomes
P (AB | ab) =
∫dλ ρ(λ)P (A | aλ)P (B | bλ) . (13.21)
However, as Jaynes notes, the fundamentally correct relation for P (AB |ab) according to probability theory should be
P (AB | ab) =
∫dλP (AB | abλ)P (λ | ab) . (13.22)
Assuming that knowledge of the experimenters’ choices gives no in-formation about λ, then one can write
P (λ | ab) = ρ(λ) . (13.23)
The fundamentally correct factorization of the other probability factorof (13.22), P (AB | abλ), is given by [141]
P (AB | abλ) = P (A | abλ)P (B |Aabλ) . (13.24)
However, as Jaynes notes, one could argue as Bell did that EPR de-mands that A should not influence events at B for space-like intervals.This requirement then leads to the factorization used by Bell to repre-sent the EPR problem
P (AB | abλ) = P (A | aλ)P (B | bλ) . (13.25)
Nonetheless, the factorization (13.25) disagrees with the formalism ofquantum mechanics in that the result of the measurement at A mustbe known before the correlation affects the measurement at B, i.e.P (B |Aab). Hence it is not surprising that Bell’s inequality is not sat-isfied in systems that obey quantum mechanics.
Two additional hidden assumptions are identified by Jaynes in Bell’sderivation, in addition to those mentioned above:

§13.3 EPR paradox and Bell’s inequality 201
1. Bell assumes that a conditional probability P (X |Y ) representsa physical causal influence of Y on X. However, consistency re-quires that conditional probabilities express logical inferences notphysical influences.
2. The class of Bell hidden variable theories mentioned in section§13.3.1 does not include all local hidden variable theories. Asmentioned in that section, hidden variable theories don’t need tosatisfy the form of (13.14) (or alternatively (13.21)), to reproducequantum mechanical results, as evidenced in Bohmian mechanics.
Bell’s inequality thus applies to the class of hidden variable theoriesthat satisfy his relation (13.14), i.e. Bell hidden variable theories, butnot necessarily to other hidden variable dynamic theories.
The superluminal communication implication stems from the firsthidden assumption above which shows that what is thought to travelfaster than the speed of light is actually a logical inference, not a physicalcausal influence. As summarized by Jaynes [141],
The measurement at A at time t does not change the real physicalsituation at B; but it changes our state of knowledge about thatsituation, and therefore it changes the predictions we are able tomake about B at some time t′. Since this is a matter of logicrather than physical causation, there is no action at a distanceand no difficulty with relativity.
There is simply no superluminal communication, as required by spe-cial relativity. Assuming otherwise would be similar to Pauli assumingthat the established law of conservation of energy mysteriously fails inweak interactions instead of successfully postulating a new particle (theneutrino).
§13.3.5 Quantum confusion
In this section, we have investigated the applicability of Bell’s inequal-ity, based on the assumptions used in its derivation. We have consideredtwo examples of hidden variable dynamic theories that do not satisfyBell’s initial equation (13.14) used to derive his inequality, and conse-quently for which Bell’s inequality is not applicable: one based on theNyquist-Shannon Sampling Theorem of Fourier transform theory andthe other based on the wave/particle solutions of the STCED wave eq-uations which are similar to Louis de Broglie’s “double solution”. Wehighlight two hidden assumptions identified by Jaynes [141] that limitthe applicability of Bell’s inequality, as derived, to Bell hidden variable

202 Chapter 13 Wavefunctions, Operators and Measurements
theories and that show that there are no superluminal physical influ-ences, only logical inferences.
We close with a quote from Jaynes [143, see p. 328] that captureswell the difficulty we are facing:
What is done in quantum theory today... when no cause is ap-parent one simply postulates that no cause exists – ergo, thelaws of physics are indeterministic and can be expressed only inprobability form.
Thus we encounter paradoxes such as seemingly superluminal physicalinfluences that contradict special relativity, and “spooky action at adistance” is considered as an explanation rather than working to under-stand the physical root cause of the problem. This section shows that,in this case, the root cause is due to improper assumptions, specificallythe first hidden assumption identified by Jaynes highlighted in section§13.3.4 above, that is assuming that a conditional probability representsa physical influence instead of the physically correct logical inference.In summary,
He who confuses reality with his knowledge of reality generatesneedless artificial mysteries. [141]
§13.4 Physically realistic quantum mechanics
In the previous sections, we have reviewed the physical difficulties pre-sent in quantum mechanics. One finds that, invariably, the problemsarise because it is assumed that the mathematical theory represents aphysical reality that is simply not the case. And we have not covered themore esoteric ideas such as the Everett multiple universe, multiverse, etcinterpretations of the mathematical theory that give even more credenceto the physicality of the mathematics, which are just larger cohorts ofangels dancing on a pinhead. The paradoxes are seen to result fromassigning physical reality to the probabilities of quantum mechanicsrather than the logical inferences that they are.
As it should by now be evident to the reader, at this time quantummechanics can only deal with probabilities associated with quantumphysical processes until a dynamic theory is developed that explains theprobabilistic results that are obtained. This book proposes such a the-ory – consequently, we had to take this detour in the basic methodologyof quantum mechanics to enlighten the reader on its nature. The cur-rent orthodox interpretation of quantum mechanics does not deter fromthe success of the theory when results are compared to the probabilisticpredictions of quantum theory. The problem resides with the interpre-

§13.4 Physically realistic quantum mechanics 203
tation of those probabilities which has resulted in the stultification offurther progress in quantum physics. We need to bring physics backinto quantum mechanics to get a physically realistic theory of quantumphysics.

204

Chapter 14
STCED Framework for Quantum Physics
In this chapter, we cover the relation of spacetime continuum defectsto quantum physics. The framework of quantum physics, based ondislocations and disclinations in the spacetime continuum is coveredin the sections of this chapter. This covers the basic characteristicsof quantum physics, including quantization, bosons and fermions andquantum electrodynamics.
Screw dislocations in quantum physics are considered in section §15.1and edge dislocations are covered in section §15.2. Wedge disclinationsare considered in section §15.3 and twist disclinations in section §15.4.The association of these defects to fundamental quantum particles arecovered in chapter 16. Chapter 17 covers defect interactions in quantumphysics.
Chapter 18 provides physical explanations of QED phenomena pro-vided by defects in the spacetime continuum. We conclude with a sum-mary of the framework used for the development of a physical descrip-tion of physical processes at the quantum level, based on dislocationsand disclinations in the spacetime continuum within the theory of theElastodynamics of the Spacetime Continuum (STCED).
There is no doubt that the task we have set for ourselves is a tall or-der. The theories of quantum mechanics and quantum electrodynamicshave been very successful at reproducing the results of quantum exper-imental measurements. In addition, electroweak and quantum chromo-dynamics theories have been derived from those. Reproducing theseresults within a new physical framework is a significant challenge. Thepossibility of providing a physical description of quantum physics is thedriving force behind this effort which, if we are successful, can take usto the next level in our description of the subquantum level. In thefollowing chapters, we will show that the characteristics of the proposedphysical framework match those derived from quantum mechanics andcan lay the foundation for quantum physical calculations.
§14.1 Framework for quantum physics
In a solid, dislocations represent the fundamental displacement pro-cesses that occur in its atomic structure. A solid viewed in electron

206 Chapter 14 STCED Framework for Quantum Physics
microscopy or other microscopic imaging techniques is a tangle of screwand edge dislocations [132, see p. 35 and accompanying pages]. Simi-larly, dislocations in the spacetime continuum are taken to represent thefundamental displacement processes that occur in its structure.
In a similar fashion, disclinations represent the fundamental rota-tional processes that occur in the spacetime continuum structure. Thesefundamental displacement and rotational processes should thus corre-spond to basic quantum phenomena and provide a framework for thedescription of quantum physics in STCED.
We find that dislocations and disclinations have fundamental proper-ties that reflect those of particles at the quantum level. Dislocations, astranslational processes, are found to correspond to bosons, while discli-nations, as rotational processes, are found to correspond to fermions,based on their characteristics and symmetry transformations. In addi-tion, the fundamental properties of defects in the spacetime continuumare found to include self-energy and interactions mediated by the strainenergy density of the dislocations and disclinations.
§14.2 Quantization
The Burgers vector as defined by expression (9.1) has similarities to theBohr-Sommerfeld quantization rule∮
C
p dq = nh (14.1)
where q is the position canonical coordinate, p is the momentum canon-ical coordinate and h is Planck’s constant. This leads us to consider thefollowing quantization rule for the spacetime continuum: at the quan-tum level, we assume that the spacetime continuum has a granularitycharacterized by a length b0 corresponding to the smallest elementaryBurgers dislocation-displacement vector possible in the spacetime con-tinuum.
The idea that the existence of a shortest length in nature would leadto a natural cut-off to generate finite integrals in QED has been raisedbefore [116]. The smallest elementary Burgers dislocation-displacementvector introduced here provides a lower bound as shown in calculationsin forthcoming chapters. Then the magnitude of a Burgers vector canbe expressed as a multiple of the elementary Burgers vector:
b = nb0 . (14.2)

§14.3 Symmetry considerations 207
We find that b is usually divided by 2π in dislocation equations, andhence we define
b =b
2π, (14.3)
and similarly for the elementary Burgers dislocation-displacement vec-tor b0,
b0 =b02π
. (14.4)
Similarly, the disclination Frank vector Ω is usually divided by 2π indisclination equations, and hence we define the symbol
Ω− =Ω
2π. (14.5)
The question of quantization in STCED is a thorny issue, as it im-plies a certain discreteness to the spacetime continuum. As we seein various chapters in this book, indications are that this discretenesswould be lattice-like, possibly leading to the consideration of additionalsmaller spacetime continuum structures, similar to what is observed insolid state physics. It may be possible that there is no need to intro-duce discreteness in STCED, but at this time there are arguments thatmilitate in favour of that requirement.
§14.3 Symmetry considerations
It has become de rigueur in physics books to specify the applicablesymmetry principles such as U(1), SO(3), SU(2), SU(3) upfront to assistin the symmetry characterization of the subject matter. While it isuseful to understand the symmetry representation of our theories, itdoes not provide a complete physical description of the theory. Asnoted by Georgi [108, p. 155] [280, p. 77],
A symmetry principle should not be an end in itself. Sometimesthe physics of a problem is so complicated that symmetry ar-guments are the only practical means of extracting informationabout the system. Then, by all means use them. But, do notstop looking for an explicit dynamical scheme that makes moredetailed calculation possible. Symmetry is a tool that shouldbe used to determine the underlying dynamics, which must inturn explain the success (or failure) of the symmetry arguments.Group theory is a useful technique, but it is no substitute forphysics.
Hence we will include symmetry considerations in this book as an ad-junct to our physical theories where justified.

208 Chapter 14 STCED Framework for Quantum Physics
As symmetry principles are associated with specific conservationlaws, we list the main ones in the table below. We have already used
Symmetry principle Invariance Conservation law
Time translation Time invariance Mass-energy
Space translation Translation symm. Linear momentum
SO(3)∗ Rotation invariance Angular momentum
U(1)† Gauge invariance Electric charge
SU(2)‡ Gauge invariance Isospin
SU(3)§ Gauge invariance Color charge
∗Group of special orthogonal transformations of three (real) variables.
†Group of unitary transformations of one complex variable.
‡Group of special unitary transformations of two complex variables.
§Group of special unitary transformations of three complex variables.
Table 14.1: Symmetry principles and conservations laws.
the conservation of energy-momentum and angular momentum to de-duce that the spacetime continuum is isotropic and homogeneous asseen in section §2.1.
§14.4 Bosons and fermions
Elementary quantum particles are classified into bosons and fermionsbased on integral and half-integral multiples of ~ respectively. Bosonsobey Bose-Einstein statistics while fermions obey Fermi-Dirac statisticsand the Pauli Exclusion Principle. These determine the number of non-interacting indistinguishable particles that can occupy a given quantumstate: there can only be one fermion per quantum state while there isno such restriction on bosons.
This is explained in quantum mechanics using the combined wave-function of two indistinguishable particles when they are interchanged:
Bosons : Ψ(1, 2) = Ψ(2, 1)
Fermions : Ψ(1, 2) = −Ψ(2, 1) .(14.6)
Bosons commute and as seen from (14.6) above, only the symmetric partcontributes, while fermions anticommute and only the antisymmetric

§14.4 Bosons and fermions 209
part contributes. There have been attempts at a formal explanation ofthis phenomemon, the spin-statistics theorem, with Pauli’s being one ofthe first [209]. Jabs [135] provides an overview of these and also offershis own attempt at an explanation.
However, as Feynman comments candidly in [101, see p. 4-3],
We apologize for the fact that we cannot give you an elementaryexplanation. An explanation has been worked out by Pauli fromcomplicated arguments of quantum field theory and relativity.He has shown that the two must necessarily go together, but wehave not been able to find a way of reproducing his argumentson an elementary level. It appears to be one of the few places inphysics where there is a rule which can be stated very simply, butfor which no one has found a simple and easy explanation. Theexplanation is deep down in relativistic quantum mechanics. Thisprobably means that we do not have a complete understandingof the fundamental principle involved. For the moment, you willjust have to take it as one of the rules of the world.
The question of a simple and easy explanation is still outstanding.Eq. (14.6) is still the easily understood explanation, even though it isbased on the exchange properties of particles, rather than on how thestatistics of the particles are related to their spin properties. At thispoint in time, it is an empirical description of the phenomenon.
Ideally, the simple and easy explanation should be a physical expla-nation to provide a complete understanding of the fundamental prin-ciples involved. STCED provides such an explanation, based on dis-locations and disclinations in the spacetime continuum. Part of thecurrent problem is that there is no understandable physical picture ofthe quantum level. STCED provides such a picture.
The first point to note is that based on their properties, bosons obeythe superposition principle in a quantum state. The location of quantumparticles is given by the deformation displacement uµ. Dislocationsare translational displacements that commute, satisfy the superpositionprinciple and behave as bosons. As we saw in section §3.6, particles withspin 0, 1 and 2 are described by (3.50) and (3.51) which are equationsin terms of uµ;ν .
Disclinations, on the other hand, are rotational displacements thatdo not commute and that do not obey the superposition principle. Youcannot have two rotational displacements in a given quantum state.Hence their number is restricted to one per quantum state. They behaveas fermions. Spinors represent spin one-half fermions. Dirac spinorfields represent electrons. Weyl spinors, derived from Dirac’s spinor

210 Chapter 14 STCED Framework for Quantum Physics
fields which have four complex components, are a pair of fields thathave two complex components. Interestingly enough, “[u]sing just oneelement of the pair, one gets a theory of massless spin-one-half particlesthat is asymmetric under mirror reflection and ... found ... to describethe neutrino and its weak interactions” [280, p. 63].
“From the point of view of representation theory, Weyl spinors arethe fundamental representations that occur when one studies the rep-resentations of rotations in four-dimensional space-time... spin-one-halfparticles are representation of the group SU(2) of transformations ontwo complex variables.” [280, p. 63]. To clarify this statement, each ro-tation in three dimensions (an element of SO(3)) corresponds to twodistinct elements of SU(2). Consequently, the SU(2) transformationproperties of a particle are known as the particle’s spin.
Hence, the unavoidable conclusion is that bosons are dislocations inthe spacetime continuum, while fermions are disclinations in the space-time continuum.
§14.5 Quantum electrodynamics
In STCED, the role played by virtual particles in quantum electrody-namics (QED) is replaced by the interaction of the strain energy densityof the dislocations and disclinations. QED is a perturbative theory, andthe virtual particles are introduced as an interpretation of the pertur-bative expansion represented by Feynman diagrams.
Although the existence of virtual particles in QED is generally ac-cepted, there are physicists who still question this interpretation of QEDperturbation expansions. Weingard [274] “argues that if certain ele-ments of the orthodox interpretation of states in QM are applicableto QED, then it must be concluded that virtual particles cannot exist.This follows from the fact that the transition amplitudes correspond tosuperpositions in which virtual particle type and number are not sharp.Weingard argues further that analysis of the role of measurement in re-solving the superposition strengthens this conclusion. He then demon-strates in detail how in the path integral formulation of field theory nocreation and annihilation operators need appear, yet virtual particlesare still present. This analysis shows that the question of the existenceof virtual particles is really the question of how to interpret the propaga-tors which appear in the perturbation expansion of vacuum expectationvalues (scattering amplitudes).” [27]
The basic Feynman diagrams can be seen to represent screw dislo-cations as photons, edge dislocations as bosons, twist and wedge discli-

§14.5 Quantum electrodynamics 211
nations as fermions, and their interactions. Virtual particles would re-quire the presence of virtual dislocations and virtual disclinations in thespacetime continuum, which clearly does not make sense. Instead, theexchange of virtual particles in interactions can be seen to be a pertur-bation expansion representation of the forces resulting from the overlapof the defects’ strain energy density, with suitably modified diagrams.The perturbative expansions are thus replaced by finite analytical ex-pressions.
This theory is not perturbative as in QED, but rather calculatedfrom analytical expressions. The analytical equations can become verycomplicated, and in some cases, perturbative techniques are used tosimplify the calculations, but the availability of analytical expressionspermits a better understanding of the fundamental processes involved.

212

Chapter 15
Properties of Defects in Quantum Physics
In this chapter, we collect and summarize the properties of the screwdislocation, the edge dislocation, the wedge disclination and the twistdisclination to help in the identification of these spacetime defects inquantum physics.
§15.1 Properties of screw dislocations
Screw dislocations are covered in section §9.2 and in section §9.5 ondeWit’s dislocation line for the case where bx = by = 0. Using theparity operator P defined according to [67, see section 3.3]
f(x, t)→ g(x, t) = Pf(x, t) = f(−x, t) , (15.1)
on (9.2) or (9.128) for bx = by = 0, we obtain
P(uz) = P(bz2π
tan−1 y
x
)=−bz2π
tan−1
(−y−x
)= −uz . (15.2)
Hence the screw dislocation has odd parity under parity reversal asexpected [67, see p. 71].
The rotation vector for the screw dislocation is given by (9.5)
ωr = − bz4π
. (15.3)
As seen in section §3.6, the trace of the antisymmetric field ωµν is zero,and hence massless. The field ωµν is of spin 1, and since it is massless,it does not have a spin 0 component. From section §9.2.3, the rest-mass density of the screw dislocation is indeed ρ = 0, and from section§9.2.4, so is its charge density % = 0 and its current density jν = 0.Screw dislocations are the easiest defect to analyze.
Screw dislocations in the spacetime continuum are massless, trans-verse deformations, and are hence identified specifically with photons.Consider the displacement of a stationary screw dislocation as derivedin section §9.2.1:
uz =b
2πθ = b θ . (15.4)

214 Chapter 15 Properties of Defects in Quantum Physics
Figure 15.1: A wavelength of a screw dislocation.
Taking the derivative with respect to time, we obtain
uz = vz =b
2πθ =
b
2πω . (15.5)
The speed of the transverse displacement is c, the speed of light. Sub-stituting for ω = 2πν, (15.5) becomes
c = b ν . (15.6)
Hence
b = λ , (15.7)
the wavelength of the screw dislocation. This result is illustrated inFig. 15.1. It is important to note that this relation applies only to screwdislocations.
The strain energy density of the screw dislocation is given by thetransverse distortion energy density derived in section §9.2.3. For astationary screw dislocation, substituting (14.3) into (9.22),
E⊥ =µ0 b
2
2
1
r2. (15.8)
As we have seen previously in section §9.2.3, the longitudinal strainenergy density is given by E‖ = 0.

§15.2 Properties of edge dislocations 215
§15.2 Properties of edge dislocations
Edge dislocations are covered in section §9.3 and in section §9.5 ondeWit’s dislocation line for the case where bz = 0. Using the parityoperator P as per (15.1) on (9.128) for bz = 0, we obtain
P(ux) = P(bx2π
(θ + β0
xy
r2
)+
by2π
(α0 ln r + β0
y2
r2
))= − bx
2π
(θ + β0
xy
r2
)− by
2π
(α0 ln r + β0
y2
r2
)= −ux
P(uy) = P(− bx
2π
(α0 ln r + β0
x2
r2
)+
by2π
(θ − β0
xy
r2
))=bx2π
(α0 ln r + β0
x2
r2
)− by
2π
(θ − β0
xy
r2
)= −uy
uz = 0
(15.9)
where α0 and β0 are as per (9.129) and both r and θ are unchanged bythe substitution of (15.1). Hence the edge dislocation has odd parityunder parity reversal.
The rotation vector for the edge dislocation is given by (9.138)
ωz =1
2π
bxx+ byy
r2. (15.10)
From section §9.5, the mass energy density of the discrete dislocationline is given by (9.134)
ρc2 =4
π
κ0µ0
2µ0 + λ0
bxy − byxr2
, (15.11)
and from section §9.5.2, the non-zero components of the current densityare given by (9.147)
jx =ϕ0
2πµ0
byr2 + 2x (bxy − byx)
r4
jy = − ϕ0
2πµ0
bxr2 − 2y (bxy − byx)
r4
(15.12)
and the charge density by (9.148)
% = ± 1
4πϕ0ε0c
1
r2
√b2x + b2y . (15.13)

216 Chapter 15 Properties of Defects in Quantum Physics
.The strain energy density of the edge dislocation is derived in section
§9.3.3. The dilatation (massive) strain energy density of the edge dislo-cation is given by the longitudinal strain energy density E‖ (9.50) andthe distortion (massless) strain energy density of the edge dislocation isgiven by the transverse strain energy density E⊥ (9.51).
The discrete dislocation line longitudinal dilatation strain energydensity is given by (9.139)
E‖ =1
2π2
κ0 µ20
(2µ0 + λ0)2
(bxy − byx)2
r4. (15.14)
The discrete dislocation line distortion strain energy density, which in-cludes the screw dislocation, is given by (9.145)
E⊥ =µ0
8π2
b2zr2
+µ0
4π2α2
0
(bxy − byx)2
r4+
+µ0
2π2β2
0
(bxx+ byy)2
r4− 3
2π2
µ0λ0
2µ0 + λ0
bxbyxy
r4.
(15.15)
As done in §9.5.1, substituting from (9.138) and (9.139), (15.15) be-comes
E⊥ =µ0
8π2
b2zr2
+1
2
µ0
κ0E‖ + 2µ0
(µ0 + λ0
2µ0 + λ0
)2
ω2z−
− 3
2π2
µ0λ0
2µ0 + λ0
bxbyxy
r4.
(15.16)
The first term is the screw dislocation strain energy density of (9.22),the second term is proportional to the edge dislocation distortion strainenergy density arising from the longitudinal strain energy density of(9.139), the third term is the edge dislocation distortion strain energydensity arising from the rotation vector of (9.138) and the last termis a moment distortion strain energy density term. It is interesting tonote that there are no interaction terms (cross-terms) between screwand edge dislocations for a dislocation line.
§15.3 Properties of wedge disclinations
Wedge disclinations are covered in section §10.6 on deWit’s disclinationline for the case where Ωx = Ωy = 0. Using the parity operator P as

§15.3 Properties of wedge disclinations 217
per (15.1) on the non-zero components of (10.94), we obtain
P(ux) = P(− Ωz
2π(y θ − α0 x (ln r − 1))
)= −Ωz
2π(y θ − α0 x (ln r − 1)) = ux
P(uy) = P(
Ωz2π
(x θ + α0 y (ln r − 1))
)=
Ωz2π
(x θ + α0 y (ln r − 1)) = uy
(15.17)
where α0 and β0 are as per (9.129) and both r and θ are unchanged bythe substitution of (15.1). Hence the wedge disclination has even parityunder parity reversal as expected from an axial vector.
The rotation vector for the wedge disclination is given by (10.99)
ωz =Ωz2π
. (15.18)
From section §10.6, the mass energy density of the wedge disclinationis given by (10.102)
ρc2 =4κ0Ωzπ
(µ0
2µ0 + λ0ln r +
1
2
µ0 + λ0
2µ0 + λ0
), (15.19)
and from section §10.6.1, the non-zero components of the current densityare given by (10.109)
jx =ϕ0Ωz2πµ0
x
r2=ϕ0Ωz2πµ0
cos θ
r
jy = −ϕ0Ωz2πµ0
y
r2=ϕ0Ωz2πµ0
sin θ
r
(15.20)
and the charge density by (10.110)
% = ± 1
4πϕ0ε0c
Ωzr2
. (15.21)
The strain energy density of the wedge disclination is derived in sec-tion §10.6. The dilatation (massive) strain energy density of the wedgedisclination is given by the longitudinal strain energy density E‖ and thedistortion (massless) strain energy density of the wedge disclination is

218 Chapter 15 Properties of Defects in Quantum Physics
given by the transverse strain energy density E⊥. The wedge disclinationlongitudinal dilatation strain energy density is given by (10.104)
E‖ =κ0Ω2
z
2π2
(α0 ln r +
1
2β0
)2
(15.22)
and the wedge disclination distortion strain energy density is given by(10.108)
E⊥ =µ0Ω2
z
4π2
[(α0 ln r +
3
2β0
)2
−(
3
2β0
)2]. (15.23)
§15.4 Properties of twist disclinations
Twist disclinations are covered in section §10.7 on deWit’s disclinationline for the case where Ωz = 0. Using the parity operator P as per (15.1)on (10.114), we obtain
P(ux) = ux
= −Ωx2π
z
(α0 ln r + β0
y2
r2
)+
Ωy2π
z(θ + β0
xy
r2
)P(uy) = uy
= −Ωx2π
z(θ − β0
xy
r2
)− Ωy
2πz
(α0 ln r + β0
x2
r2
)P(uz) = uz
=Ωx2π
(y θ − α0 x (ln r − 1))− Ωy2π
(x θ + α0 y (ln r − 1))
(15.24)
where α0 and β0 are as per (9.129) and both r and θ are unchanged bythe substitution of (15.1). Hence the twist disclination has even parityunder parity reversal as expected for an axial vector.
The rotation vector for the twist disclination is given by (10.120)
ωx =Ωx2π
θ
ωy =Ωy2π
θ
ωz =Ωx2π
yz
r2− Ωy
2π
xz
r2.
(15.25)

§15.4 Properties of twist disclinations 219
From section §10.7, the mass energy density of the wedge disclinationis given by (10.123)
ρc2 =4κ0
π
µ0
2µ0 + λ0(Ωxx+ Ωyy)
z
r2, (15.26)
and from section §10.7.1, the non-zero components of the current densityare given by (10.129)
jx = − ϕ0
2πµ0
Ωxzr2 − 2xz (Ωxx+ Ωyy)
r4
jy = − ϕ0
2πµ0
Ωyzr2 − 2yz (Ωxx+ Ωyy)
r4
jz = − ϕ0
2πµ0
Ωxx+ Ωyy
r2
(15.27)
and the charge density by (10.130)
% = ± 1
4πϕ0ε0c
1
r2
√(Ω2x + Ω2
y
)z2 + (Ωxx+ Ωyy)
2. (15.28)
The strain energy density of the twist disclination is derived in sec-tion §10.7. The dilatation (massive) strain energy density of the twistdisclination is given by the longitudinal strain energy density E‖ andthe distortion (massless) strain energy density of the twist disclinationis given by the transverse strain energy density E⊥. The twist disclina-tion longitudinal dilatation strain energy density is given by (10.124)
E‖ =κ0
2π2
(µ0
2µ0 + λ0(Ωxx+ Ωyy)
z
r2
)2
(15.29)
and the twist disclination distortion strain energy density is given by

220 Chapter 15 Properties of Defects in Quantum Physics
(10.127)
E⊥ =µ0Ω2
x
2π2
[α2
0 ln2 r +β2
0
r2+ 2α0β0
y2
r2ln r+
+[(α2
0 − 12 β
20
)x2 + β2
0y2] z2
r4
]+
+µ0Ω2
y
2π2
[α2
0 ln2 r +β2
0
r2+ 2α0β0
x2
r2ln r+
+[β2
0x2 +
(α2
0 − 12 β
20
)y2] z2
r4
]−
− µ0ΩxΩyπ2
[β0
(α0 ln r + 1
2 β0
)+(β2
0 − 12 α
20
) z2
r2
].
(15.30)
In the next chapter, we consider the strain energy of these defectsas it applies to quantum physics.

Chapter 16
Defect Strain Energy in Quantum Physics
Strain energy is the fundamental defining energy characteristic ofdefects and their interactions in the spacetime continuum. In this chap-ter, we calculate the total strain energy W for the spacetime continuumdefects, namely the screw dislocation, the edge dislocation, the wedgedisclination and the twist disclination. These include both longitudi-nal dilatation strain energy W‖ and transverse distortion strain energyW⊥, except for the screw dislocation, where E‖ = 0. The interaction ofdefects is mediated by their strain energy, and will be considered in thenext chapter.
In general, the longitudinal dilatation strain energy W‖ is easier tocalculate than the transverse distortion strain energy W⊥. The sim-plest case is the calculation of the screw dislocation strain energy. Weconsider stationary defects, that is defects that have no explicit timedependence. In the general case of moving dislocations, the derivationof the screw dislocation transverse strain energy and the edge disloca-tion transverse and longitudinal strain energies is much more difficult.In this chapter, we provide an overview discussion of the topic, anddirections of possible exploration of the problem.
§16.1 Screw dislocation transverse strain energy
The total strain energy is calculated by integrating the strain energydensity over the volume of the screw dislocation.
§16.1.1 Stationary screw dislocation
The total strain energy of the stationary screw dislocation is given by
WS⊥ =
∫V
ES⊥ dV (16.1)
where the volume element dV in cylindrical polar coordinates is givenby rdr dθ dz. Substituting for ES⊥ from (15.8), (16.1) becomes
WS⊥ =
∫V
µ0 b2
2r2rdr dθ dz. (16.2)

222 Chapter 16 Defect Strain Energy in Quantum Physics
From (14.2), b can be taken out of the integral to give
WS⊥ =
µ0 b2
2
∫ Λ
b0
1
rdr
∫θ
dθ
∫z
dz (16.3)
where Λ is a cut-off parameter corresponding to the radial extent of thedislocation, limited by the average distance to its nearest neighbours.The strain energy per wavelength is then given by
WS⊥λ
=µ0 b
2
2ln
Λ
b0
∫ 2π
0
dθ (16.4)
and finallyWS⊥λ
=µ0 b
2
4πln
Λ
b0. (16.5)
The implications of the total strain energy of the screw disloca-tion are discussed further in comparison to Quantum Electrodynamics(QED) in section §18.3.1.
§16.1.2 Moving screw dislocation
The transverse strain energy of a moving screw dislocation, which alsocorresponds to its total strain energy, is given by
WS⊥ =
∫V
ES⊥ dV (16.6)
where the strain energy density ES⊥ is given by (9.24), viz.
ES⊥ =1
2b2 µ0
α2
(x− vt)2 + α2y2(16.7)
and V is the volume of the screw dislocation. The volume element dVin cartesian coordinates is given by dxdy dz d(ct).
Substituting for ES⊥, (16.6) becomes
WS⊥ =
∫V
1
2b2 µ0
α2
(x− vt)2 + α2y2dx dy dz d(ct). (16.8)
As before, b is taken out of the integral from (14.2), and the integralover z is handled by considering the strain energy per unit length of thedislocation:
WS⊥`
=b2 µ0
2
∫ct
∫y
∫x
b20≤x2+y2≤Λ2
α2
(x− vt)2 + α2y2dx dy d(ct) (16.9)

§16.1 Screw dislocation transverse strain energy 223
where ` is the length of the dislocation and as before, Λ is a cut-offparameter corresponding to the radial extent of the dislocation, limitedby the average distance to its nearest neighbours.
Evaluating the integral over x [281],
WS⊥`
=b2 µ0
2α2
∫ct
∫y
dy d(ct)
[1
αyarctan
(x− vtαy
)]√Λ2−y2
√y2−b20
(16.10)
where the limits corresponding to the maximum cut-off parameter Λand minimum cut-off parameter b0 are stated explicitly. Applying thelimits of the integration, we obtain
WS⊥`
=b2 µ0
2α2
∫ct
∫y
dy d(ct)1
αyarctan
(√Λ2 − y2 − vt
αy
)−
− 1
αyarctan
(√y2 − b20 − vt
αy
).
(16.11)
This integration over y is not elementary and likely does not lead toa closed analytical form. If we consider the following simpler integral,the solution is given by∫
y
1
αyarctan
(x− vtαy
)dy =
− i2
[Li2
(−i x− vt
αy
)− Li2
(ix− vtαy
)] (16.12)
where Lin(x) is the polylogarithm function. As pointed out in [282],“[t]he polylogarithm arises in Feynman diagram integrals (and, in par-ticular, in the computation of quantum electrodynamics corrections tothe electrons gyromagnetic ratio), and the special cases n = 2 and n = 3are called the dilogarithm and the trilogarithm, respectively.” This is afurther indication that the interaction of strain energies are the phys-ical source of quantum interaction phenomena described by Feynmandiagrams as is discussed further in section §18.1.

224 Chapter 16 Defect Strain Energy in Quantum Physics
§16.2 Edge dislocation longitudinal strain energy
The total longitudinal strain energy of the edge dislocation is calculatedby integrating the edge dislocation dilatation strain energy density overthe volume of the edge dislocation.
§16.2.1 Stationary edge dislocation
The longitudinal strain energy of the stationary edge dislocation is givenby
WE‖ =
∫V
EE‖ dV. (16.13)
Substituting for E‖ from (9.69), this equation becomes
WE‖ =
∫V
b2
2π2
κ0 µ20
(2µ0 + λ0)2
sin2 θ
r2dV. (16.14)
Similarly to the previous derivation of section §16.1.1, this integral gives
WE‖
`=
1
2πb2 κ0
(µ0
2µ0 + λ0
)2
lnΛ
b0. (16.15)
The total strain energy of the stationary screw and edge dislocationshave similar functional forms, with the difference residing in the propor-tionality constants. This is due to the simpler nature of the stationarydislocations and their cylindrical polar symmetry. This similarity isnot present for the general case of moving dislocations as evidenced inequations (9.24), (9.87) and (9.89).
§16.2.2 Moving edge dislocation
The longitudinal strain energy of a moving edge dislocation is given by
WE‖ =
∫V
EE‖ dV (16.16)
where the strain energy density EE⊥ is given by (9.87), viz.
EE‖ =1
2κ0 b
2
(2µ0
2µ0 + λ0
αly
(x− vt)2 + α2l y
2
)2
(16.17)
and V is the volume of the edge dislocation. The volume element dVin cartesian coordinates is given by dxdy dz d(ct).

§16.2 Edge dislocation longitudinal strain energy 225
Substituting for EE‖ , (16.16) becomes
WE‖ =
∫V
1
2κ0 b
2
(2µ0
2µ0 + λ0
αly
(x− vt)2 + α2l y
2
)2
×
×dxdy dz d(ct).
(16.18)
As before, b is taken out of the integral from (14.2), and the integralover z is handled by considering the strain energy per unit length of thedislocation:
WE‖
`= 2 κ0 b
2 µ20
(2µ0 + λ0)2∫ct
∫y
∫x
b20≤x2+y2≤Λ2
(αly)2
((x− vt)2 + α2l y
2)2 dxdy d(ct)
(16.19)
where ` is the length of the dislocation and as before, Λ is a cut-offparameter corresponding to the radial extent of the dislocation, limitedby the average distance to its nearest neighbours.
The integrand has a functional form similar to that of (16.9), anda similar solution behaviour is expected. Evaluating the integral overx [281],
WE‖
`= 2 κ0 b
2 µ20
(2µ0 + λ0)2
∫ct
∫y
dy d(ct)[1
2
x− vt(x− vt)2 + (αly)2
+
+1
2αlyarctan
(x− vtαly
)]√Λ2−y2
√y2−b20
(16.20)
where the limits corresponding to the maximum cut-off parameter Λand minimum cut-off parameter b0 are stated explicitly. Applying the

226 Chapter 16 Defect Strain Energy in Quantum Physics
limits of the integration, we obtain
WE‖
`= 2 κ0 b
2 µ20
(2µ0 + λ0)2
∫ct
∫y
dy d(ct)[1
2
√Λ2 − y2 − vt
(√
Λ2 − y2 − vt)2 + (αly)2−
−1
2
√y2 − b20 − vt
(√y2 − b20 − vt)2 + (αly)2
+
+1
2αlyarctan
(√Λ2 − y2 − vt
αly
)−
− 1
2αlyarctan
(√y2 − b20 − vt
αly
)].
(16.21)
The integration over y is again found to be intractable. It includesthat of (16.11) in its formulation, and likely does not lead to a closedanalytical form. In the arctan Λ integral of (16.11) and (16.21), we can
make the approximation√
Λ2 − y2 ' Λ and evaluate this term as seenin (16.12): ∫
y
1
αlyarctan
(Λ− vtαly
)dy =
− i2
[Li2
(−i Λ− vt
αly
)− Li2
(i
Λ− vtαly
)] (16.22)
where Lin(x) is the polylogarithm function as seen previously.
§16.2.3 deWit dislocation line
The longitudinal strain energy of the deWit dislocation line is obtainedfrom
WE‖ =
∫V
EE‖ dV. (16.23)
Substituting for EE‖ from (9.139), this equation becomes
WE‖ =
∫V
1
2π2
κ0 µ20
(2µ0 + λ0)2
(bxy − byx)2
r4dV (16.24)
where V is the volume of the deWit line dislocation, with dV given bydx dy dz in cartesian coordinates. As before, b can be taken out of the

§16.3 Edge dislocation transverse strain energy 227
integral from (14.2), and the integral over z is handled by consideringthe strain energy per unit length of the dislocation:
WE‖
`=
2κ0µ20
(2µ0 + λ0)2
∫y
∫x
b20≤x2+y2≤Λ2
(bxy − byx)2
r4dxdy (16.25)
where ` is the length of the dislocation and as before, Λ is a cut-offparameter corresponding to the radial extent of the dislocation, limitedby the average distance to its nearest neighbours.
In cylindrical polar coordinates, (16.25) is written as
WE‖
`=
2κ0µ20
(2µ0 + λ0)2
∫ 2π
0
∫ Λ
b0
(bx sin θ − by cos θ)2
r2rdr dθ . (16.26)
Evaluating the integral over r, (16.26) becomes
WE‖
`=
2κ0µ20
(2µ0 + λ0)2ln
Λ
b0∫ 2π
0
(b2x sin2 θ − 2bxby sin θ cos θ + b2y cos2 θ
)dθ .
(16.27)
Evaluating the integral over θ [281], we obtain
WE‖
`=
2κ0µ20
(2µ0 + λ0)2ln
Λ
b0
(b2xπ + b2yπ
)(16.28)
which is rewritten as
WE‖
`=
1
2π
κ0µ20
(2µ0 + λ0)2
(b2x + b2y
)ln
Λ
b0. (16.29)
This equation reduces to (16.15) for the stationary edge dislocation ofsection §16.2.1.
§16.3 Edge dislocation transverse strain energy
The total transverse strain energy of the edge dislocation is calculatedby integrating the edge dislocation distortion strain energy density overthe volume of the edge dislocation. As mentioned previously, the dis-tortion strain energy is in general more complicated to calculate thanthe simpler dilatation strain energy.

228 Chapter 16 Defect Strain Energy in Quantum Physics
§16.3.1 Stationary edge dislocation
The transverse distortion strain energy of a stationary edge dislocationis given by
WE⊥ =
∫V
EE⊥ dV (16.30)
where the volume element dV in cylindrical polar coordinates is givenby rdr dθ dz. Substituting for EE⊥ from (9.79) and taking b out of theintegral, (16.30) becomes
WE⊥ =
b2µ0
(2µ0 + λ0)2∫z
∫θ
∫ Λ
b0
2(µ0 + λ0)2 cos2 θ + µ20 sin2 θ
r2rdr dθ dz
(16.31)
where again Λ is a cut-off parameter corresponding to the radial ex-tent of the dislocation, limited by the average distance to its nearestneighbours. This equation can also be written as
WE⊥ = b2µ0
∫z
∫θ
∫ Λ
b0
(α2
0
sin2 θ
r2+ 2β2
0
cos2 θ
r2
)rdr dθ dz (16.32)
where
α0 =µ0
2µ0 + λ0(16.33)
β0 =µ0 + λ0
2µ0 + λ0. (16.34)
Evaluating the integral over r, (16.32) becomes
WE⊥ = b2µ0 ln
Λ
b0
∫z
∫ 2π
0
(α2
0 sin2 θ + 2β20 cos2 θ
)dθ dz . (16.35)
Evaluating the integral over θ [281], we obtain
WE⊥ = b2µ0 ln
Λ
b0
∫z
[α2
0
2(θ − sin θ cos θ) +
+ β20 (θ + sin θ cos θ)
]2π
0
dz .
(16.36)

§16.3 Edge dislocation transverse strain energy 229
Applying the limits of integration, (16.36) becomes
WE⊥ = b2µ0 ln
Λ
b0
∫ `
0
(πα2
0 + 2πβ20
)dz , (16.37)
and evaluating the integral over z, we obtain the stationary edge dislo-cation transverse strain energy per unit length
WE⊥`
=1
4πb2µ0
(α2
0 + 2β20
)ln
Λ
b0(16.38)
where ` is the length of the edge dislocation. We find that the stationaryedge dislocation transverse strain energy per unit length is similar tothe stationary screw dislocation transverse strain energy per unit length
WS⊥`
=1
4πb2µ0 ln
Λ
b0(16.39)
except for the proportionality constant.
§16.3.2 Moving edge dislocation
The transverse strain energy of a moving edge dislocation is given by
WE⊥ =
∫V
EE⊥ dV (16.40)
where the strain energy density EE⊥ is given by (9.89) and V is thevolume of the edge dislocation. The volume element dV in cartesiancoordinates is given by dx dy dz d(ct).
Substituting for EE⊥ from (9.89), taking b out of the integral from(14.2), and handling the integral over z by considering the strain energyper unit length of the dislocation, (16.40) becomes
WE⊥`
= 4µ0 b2 c
4
v4
∫ct
∫y
∫x
b2≤x2+y2≤Λ2
dxdy d(ct)
[α4
2
2α2
((1 + α2)2 − v2/c2
)(x− vt)2 + 2α4(1 + α2
2) y2
r∗4−
− 2αl α22 α
(1 + α2
2/α2)
(x− vt)2 +(α2
2 + α2l
)y2
r∗2 r∗2l+
+α2l
(1 + α22) (x− vt)2 +
(α2
2 + α4l − 1
4 v4/c4l
)y2
r∗4l
](16.41)

230 Chapter 16 Defect Strain Energy in Quantum Physics
where
r∗2 = (x− vt)2 + α2y2 (16.42)
r∗2l = (x− vt)2 + α2l y
2 , (16.43)
` is the length of the dislocation and as before, Λ is a cut-off parametercorresponding to the radial extent of the dislocation, limited by theaverage distance to its nearest neighbours.
Again, the integrand has functional forms similar to that of (16.9)and (16.19). A similar, but more complex, solution behaviour is ex-pected, due to the additional complexity of (16.41).
We consider the moving edge dislocation in the limit as v → 0.Subsituting for (9.102) in (16.30) and using (14.3), we obtain
WE⊥ → 2b2µ0
∫z
∫θ
∫ Λ
b0
rdr dθ dz(1 +
2µ0
2µ0 + λ0+
5
4
µ20
(2µ0 + λ0)2
)sin2 θ
r2+
+1
2
(1− 2µ0
2µ0 + λ0+
µ20
(2µ0 + λ0)2
)cos2 θ
r2
(16.44)
where again Λ is a cut-off parameter corresponding to the radial ex-tent of the dislocation, limited by the average distance to its nearestneighbours.
Evaluating the integral over r,
WE⊥ → 2b2µ0 ln
Λ
b0
∫z
∫ 2π
0
dθ dz(1 +
2µ0
2µ0 + λ0+
5
4
µ20
(2µ0 + λ0)2
)sin2 θ+
+1
2
(1− 2µ0
2µ0 + λ0+
µ20
(2µ0 + λ0)2
)cos2 θ
.
(16.45)
Evaluating the integral over θ [281] and applying the limits of the inte-

§16.3 Edge dislocation transverse strain energy 231
gration, we obtain
WE⊥ → 2b2µ0 ln
Λ
b0
∫ `
0
dz(1 +
2µ0
2µ0 + λ0+
5
4
µ20
(2µ0 + λ0)2
)(π) +
+1
2
(1− 2µ0
2µ0 + λ0+
µ20
(2µ0 + λ0)2
)(π)
(16.46)
and evaluating the integral over z, we obtain the moving edge dislocationtransverse strain energy per unit length in the limit as v → 0
WE⊥`→ 3
4πb2µ0
(1 +
2
3
µ0
2µ0 + λ0+
+7
6
µ20
(2µ0 + λ0)2
)ln
Λ
b0
(16.47)
where ` is the length of the edge dislocation.
§16.3.3 deWit dislocation line
The transverse strain energy of the deWit dislocation line is obtainedfrom
WE⊥ =
∫V
EE⊥ dV. (16.48)
Substituting for EE⊥ from (9.145), this equation becomes
WE⊥ =
∫V
[µ0
8π2
b2zr2
+µ0
4π2α2
0
(bxy − byx)2
r4+
+µ0
2π2β2
0
(bxx+ byy)2
r4− 3
2π2
µ0λ0
2µ0 + λ0
bxbyxy
r4
]dV
(16.49)
where V is the volume of the deWit line dislocation, with dV given bydx dy dz in cartesian coordinates. The first term in the integral is thescrew dislocation transverse strain energy density which is as expected,given that the dislocation line includes both screw and edge dislocations.As before, b can be taken out of the integral from (14.2), and the integralover z is handled by considering the strain energy per unit length of the

232 Chapter 16 Defect Strain Energy in Quantum Physics
dislocation:
WE⊥`
=µ0
4π2
∫y
∫x
b20≤x2+y2≤Λ2
[1
2
b2zr2
+ α20
(bxy − byx)2
r4+
+ 2β20
(bxx+ byy)2
r4− 6
µ0λ0
2µ0 + λ0
bxbyxy
r4
]dxdy
(16.50)
where ` is the length of the dislocation and as before, Λ is a cut-offparameter corresponding to the radial extent of the dislocation, limitedby the average distance to its nearest neighbours.
In cylindrical polar coordinates, (16.50) is written as
WE⊥`
=µ0
4π2
∫ 2π
0
∫ Λ
b0
[1
2
b2zr2
+ α20
(bx sin θ − by cos θ)2
r2+
+ 2β20
(bx cos θ + by sin θ)2
r2−
− 6µ0λ0
2µ0 + λ0
bxby cos θ sin θ
r2
]rdr dθ .
(16.51)
Evaluating the integral over r, (16.51) becomes
WE⊥`
=µ0
4π2ln
Λ
b0
∫ 2π
0
[1
2b2z + α2
0 (bx sin θ − by cos θ)2+
+ 2β20 (bx cos θ + by sin θ)2−
− 6µ0λ0
2µ0 + λ0bxby cos θ sin θ
]dθ .
(16.52)
Evaluating the integral over θ [281], we obtain
WE⊥`
=µ0
4π2ln
Λ
b0
[πb2z + α2
0 (πb2x + πb2y)+
+ 2β20 (πb2x + πb2y)− 0
] (16.53)
where we have preserved the structure of four terms of the distortionstrain energy density of (9.146) corresponding to the screw dislocationstrain energy of (16.5), the edge dislocation distortion strain energyarising from the longitudinal strain energy density of (9.139), the edgedislocation distortion strain energy arising from the rotation vector of

§16.4 Wedge disclination longitudinal strain energy 233
(9.138) and a moment distortion strain energy term which is zero. Thisexpression is simplified to give
WE⊥`
=µ0
4π
[b2z +
(α2
0 + 2β20
) (b2x + b2y
)]ln
Λ
b0. (16.54)
This equation reduces to the sum of (16.5) for the stationary screw dislo-cation of section §16.1.1 and (16.15) for the stationary edge dislocationof section §16.3.1.
§16.4 Wedge disclination longitudinal strain energy
The longitudinal strain energy of the deWit wedge disclination is ob-tained from
WW‖ =
∫V
EW‖ dV. (16.55)
Substituting for EW‖ from (10.104), this equation becomes
WW‖ =
∫V
2κ0Ω−2z
(α0 ln r +
1
2β0
)2
dV (16.56)
where V is the volume of the wedge disclination, with dV given byrdr dθ dz in cylindrical polar coordinates. As before, we take Ω− out ofthe integral from (14.5), and the integral over z is handled by consideringthe strain energy per unit length of the disclination:
WW‖
`= 2κ0Ω−2
z
∫ 2π
0
∫ Λ
bc
(α0 ln r +
1
2β0
)2
rdr dθ (16.57)
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgersvector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Evaluating the integral over θ, (16.57) becomes
WW‖
`=
1
πκ0 Ω2
z
∫ Λ
bc
[α2
0 ln2 r + α0β0 ln r +1
4β2
0
]rdr . (16.58)
Evaluating the integral over r [281], we obtain
WW‖
`=
1
4πκ0 Ω2
z
[α2
0 r2 (2 (ln r − 1) ln r + 1) +
+ α0β0r2 (2 ln r − 1) + β2
0
r2
2
]Λ
bc
.
(16.59)

234 Chapter 16 Defect Strain Energy in Quantum Physics
Applying the limits of integration and rearranging, (16.59) becomes
WW‖
`=
1
4πκ0 Ω2
z
[α2
0
(2Λ2 ln2 Λ− 2b2c ln2 bc
)−
−(α2
0 − α0β0
) (2Λ2 ln Λ− 2b2c ln bc
)+
+(α2
0 − α0β0 + 12 β
20
) (Λ2 − b2c
) ].
(16.60)
Using the relations α20−α0β0 = −α0γ0 and α2
0−α0β0+ 12 β
20 = 1
2 (α20+γ2
0)where
γ0 =λ0
2µ0 + λ0, (16.61)
(16.60) is rewritten as
WW‖
`=
1
4πκ0 Ω2
z
[α2
0
(2Λ2 ln2 Λ− 2b2c ln2 bc
)+
+ α0γ0
(2Λ2 ln Λ− 2b2c ln bc
)+
+ 12 (α2
0 + γ20)(Λ2 − b2c
) ].
(16.62)
In most cases Λ bc, and (16.62) reduces to
WW‖
`' 1
2πκ0 Ω2
zΛ2[α2
0 ln2 Λ + α0γ0 ln Λ + 14 (α2
0 + γ20)]
(16.63)
which, using the definitions of α0, β0 and γ0, can be rewritten as
WW‖
`' 1
2π
κ0µ20
(2µ0 + λ0)2Ω2z Λ2
[ln2 Λ +
λ0
µ0ln Λ +
1
4
(1 +
λ20
µ20
)].
(16.64)
The proportionality constant of this equation is similar to that of thelongitudinal strain energy (16.15) for the stationary edge dislocationalthough the functional form is different for a disclination compared toa dislocation.

§16.5 Wedge disclination transverse strain energy 235
§16.5 Wedge disclination transverse strain energy
The transverse strain energy of the deWit wedge disclination is obtainedfrom
WW⊥ =
∫V
EW⊥ dV. (16.65)
Substituting for EW⊥ from (10.107), this equation becomes
WW⊥ =
∫V
µ0Ω2z
4π2
(α2
0 ln2 r + 3α0β0 ln r +3
4β2
0
)dV (16.66)
where V is the volume of the wedge disclination, with dV given byrdr dθ dz in cylindrical polar coordinates. As before, we take Ω out ofthe integral from (14.5), and the integral over z is handled by consideringthe strain energy per unit length of the disclination:
WW⊥`
=µ0Ω2
z
4π2
∫ 2π
0
∫ Λ
bc
(α2
0 ln2 r + 3α0β0 ln r +3
4β2
0
)rdr dθ (16.67)
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgersvector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Evaluating the integral over θ, (16.67) becomes
WW⊥`
=µ0Ω2
z
2π
∫ Λ
bc
(α2
0 ln2 r + 3α0β0 ln r +3
4β2
0
)rdr . (16.68)
This integral is similar to (16.58), but with coefficients that differ andimpact the final expression. Evaluating the integral over r [281], weobtain
WW⊥`
=µ0Ω2
z
8π
[α2
0 r2 (2 (ln r − 1) ln r + 1) +
+ 3α0β0r2 (2 ln r − 1) + 3β2
0
r2
2
]Λ
bc
.
(16.69)

236 Chapter 16 Defect Strain Energy in Quantum Physics
Applying the limits of integration and rearranging, (16.69) becomes
WW⊥`
=µ0Ω2
z
4π
[α2
0
(Λ2 ln2 Λ− b2c ln2 bc
)−
−(α2
0 − 3α0β0
) (Λ2 ln Λ− b2c ln bc
)+
+1
2
(α2
0 − 3α0β0 +3
2β2
0
)(Λ2 − b2c
) ].
(16.70)
In most cases Λ bc, and (16.70) reduces to
WW⊥`' µ0Ω2
z
4π
[α2
0 Λ2 ln2 Λ−(α2
0 − 3α0β0
)Λ2 ln Λ+
+1
2
(α2
0 − 3α0β0 +3
2β2
0
)Λ2] (16.71)
which is rearranged as
WW⊥`' µ0
4πα2
0 Ω2z Λ2
[ln2 Λ−
(1− 3
β0
α0
)ln Λ +
1
2
(1− 3
β0
α0+
3
2
β20
α20
)] (16.72)
and finally, using the definitions of α0 and β0, can be rewritten as
WW⊥`' µ0
4π
(µ0
2µ0 + λ0
)2
Ω2z Λ2
[ln2 Λ−
(1− 3
µ0 + λ0
µ0
)×
× ln Λ +1
2
(1− 3
µ0 + λ0
µ0+
3
2
(µ0 + λ0
µ0
)2)]
.
(16.73)
The proportionality constant of this equation is similar to that of thetransverse strain energy (16.38) for the stationary edge dislocation al-though the functional form is different for a disclination compared to adislocation.
§16.6 Twist disclination longitudinal strain energy
The longitudinal strain energy of the deWit twist disclination is ob-tained from
WT‖ =
∫V
ET‖ dV. (16.74)

§16.6 Twist disclination longitudinal strain energy 237
Substituting for ET‖ from (10.124), this equation becomes
WT‖ =
∫V
κ0
2π2
(µ0
2µ0 + λ0(Ωxx+ Ωyy)
z
r2
)2
dV (16.75)
where V is the volume of the wedge disclination, with dV given byrdr dθ dz in cylindrical polar coordinates. As before, we take Ω out ofthe integral from (14.5), and (16.75) becomes
WT‖ =
κ0
2π2
(µ0
2µ0 + λ0
)2
∫ `
0
∫ 2π
0
∫ Λ
bc
(Ωxx+ Ωyy)2 z2
r4rdr dθ dz
(16.76)
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgersvector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Evaluating the integral over r, (16.76) becomes
WT‖ =
κ0
2π2
(µ0
2µ0 + λ0
)2
lnΛ
bc∫ `
0
∫ 2π
0
(Ωx cos θ + Ωy sin θ)2z2 dθ dz
(16.77)
where we have used the relations cos θ = x/r and sin θ = y/r. Evaluat-ing the integral over θ [281], we obtain
WT‖ =
κ0
2π2
(µ0
2µ0 + λ0
)2
lnΛ
bc
∫ `
0
[Ω2x
2(θ + sin θ cos θ)−
−ΩxΩy cos2 θ +Ω2y
2(θ − sin θ cos θ)
]2π
0
z2 dz .
(16.78)
Applying the limits of integration and rearranging, (16.59) becomes
WT‖ =
κ0
2π
(µ0
2µ0 + λ0
)2
lnΛ
bc
(Ω2x + Ω2
y
) ∫ `
0
z2 dz . (16.79)
Evaluating the integral over z, (16.79) becomes
WT‖ =
κ0
6π
(µ0
2µ0 + λ0
)2 (Ω2x + Ω2
y
)`3 ln
Λ
bc. (16.80)

238 Chapter 16 Defect Strain Energy in Quantum Physics
One interesting aspect of this equation is that the twist disclinationlongitudinal strain energy WT
‖ is proportional to the cube of the length
of the disclination (`3), and we can’t dispose of it by considering thestrain energy per unit length of the disclination as this would still beproportional to `2. We can say that the twist disclination longitudi-nal strain energy WT
‖ is thus proportional to the space volume of thedisclination. This is a dependence that we will consider in greater detaillater.
It is interesting to note that WT‖ has the familiar dependence ln Λ/bc
of dislocations, different from the functional dependence obtained forwedge disclinations in §16.4 and §16.5. The form of this equation issimilar to that of the longitudinal strain energy (16.15) for the stationaryedge dislocation except for the factor `3/3.
§16.7 Twist disclination transverse strain energy
The transverse strain energy of the deWit twist disclination is obtainedfrom
WT⊥ =
∫V
ET⊥ dV. (16.81)
Substituting for ET⊥ from (10.127), this equation becomes
WT⊥ =
∫V
µ0Ω2
x
2π2
[α2
0 ln2 r +β2
0
r2+ 2α0β0
y2
r2ln r+
+[(α2
0 − 12 β
20
)x2 + β2
0y2] z2
r4
]+
+µ0Ω2
y
2π2
[α2
0 ln2 r +β2
0
r2+ 2α0β0
x2
r2ln r+
+[β2
0x2 +
(α2
0 − 12 β
20
)y2] z2
r4
]−
− µ0ΩxΩyπ2
[β0
(α0 ln r + 1
2 β0
)+(β2
0 − 12 α
20
) z2
r2
]dV
(16.82)
where V is the volume of the twist disclination, with dV given byrdr dθ dz in cylindrical polar coordinates. As before, we take Ω out ofthe integral from (14.5). As in the case of the twist disclination longitu-dinal strain energy, the integral over z cannot be handled by consideringthe strain energy per unit length of the disclination as (16.82) also de-pends on z2, again indicating an `3 dependence in the twist disclinationtransverse strain energy.

§16.7 Twist disclination transverse strain energy 239
The volume integral then becomes
WT⊥ =
∫ `
0
∫ 2π
0
∫ Λ
bc
µ0Ω2
x
2π2
[α2
0 ln2 r +β2
0
r2+
+ 2α0β0y2
r2ln r +
[(α2
0 − 12 β
20
)x2 + β2
0y2] z2
r4
]+
+µ0Ω2
y
2π2
[α2
0 ln2 r +β2
0
r2+ 2α0β0
x2
r2ln r+
+[β2
0x2 +
(α2
0 − 12 β
20
)y2] z2
r4
]−
− µ0ΩxΩyπ2
[β0
(α0 ln r + 1
2 β0
)+(β2
0 − 12 α
20
) z2
r2
]rdr dθ dz
(16.83)
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgersvector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Evaluating the integral over θ [281] using the relations cos2 θ = x2/r2
and sin2 θ = y2/r2 and re-arranging, (16.83) becomes
WT⊥ =
µ0
π
∫ `
0
∫ Λ
bc
(Ω2x + Ω2
y
) [α2
0 ln2 r +β2
0
r2+
+ α0β0 ln r + 12
[(α2
0 − 12 β
20
)+ β2
0
] z2
r2
]−
− 2 ΩxΩy
[β0
(α0 ln r + 1
2 β0
)+(β2
0 − 12 α
20
) z2
r2
]rdr dz .
(16.84)
Evaluating the integral over z and simplifying, (16.84) becomes
WT⊥ =
µ0
π
∫ Λ
bc
(Ω2x + Ω2
y
) `33
[α2
0
1
rln2 r + α0β0
1
rln r+
+1
2
(α2
0 + 12 β
20
) 1
r+ β2
0
1
r3
]−
− 2 ΩxΩy `
[α0β0r ln r + 1
2 β20 r +
`2
3
(β2
0 − 12 α
20
) 1
r
]dr .
(16.85)

240 Chapter 16 Defect Strain Energy in Quantum Physics
Evaluating the integral over r [281], we obtain
WT⊥ =
µ0
π
(Ω2x + Ω2
y
) `33
[1
3α2
0 ln3 r +1
2α0β0 ln2 r+
+1
2
(α2
0 + 12 β
20
)ln r − 1
2β2
0
1
r2
]−
− 2 ΩxΩy `
[1
4α0β0 r
2(2 ln r − 1)+
+1
4β2
0 r2 +
`2
3
(β2
0 − 12 α
20
)ln r
] ∣∣∣∣Λbc
.
(16.86)
Applying the limits of integration and rearranging, (16.86) becomes
WT⊥ =
µ0
π
(Ω2x + Ω2
y
) `33
[1
3α2
0
(ln3 Λ− ln3 bc
)+
+1
2α0β0
(ln2 Λ− ln2 bc
)+
1
2
(α2
0 + 12 β
20
)ln
Λ
bc−
− 1
2β2
0
(1
Λ2− 1
b2c
)]+ 2 ΩxΩy `
[1
4β0
(α0 − β0
) (Λ2 − b2c
)−
− 1
2α0β0
(Λ2 ln Λ− b2c ln bc
)− `2
3
(β2
0 − 12 α
20
)ln
Λ
bc
].
(16.87)
In most cases Λ bc, and (16.87) reduces to
WT⊥ =
µ0
π
(Ω2x + Ω2
y
) `33
[1
3α2
0
(ln3 Λ− ln3 bc
)+
+1
2α0β0
(ln2 Λ− ln2 bc
)+
1
2
(α2
0 + 12 β
20
)ln
Λ
bc−
+1
2β2
0
1
b2c
]+ 2 ΩxΩy `
[1
4β0
(α0 − β0
)Λ2−
− 1
2α0β0 Λ2 ln Λ− `2
3
(β2
0 − 12 α
20
)ln
Λ
bc
](16.88)

§16.7 Twist disclination transverse strain energy 241
which can be rearranged in terms of α0/β0 to give
WT⊥ =
µ0α20
π
(Ω2x + Ω2
y
) `33
[1
3
(ln3 Λ− ln3 bc
)+
+1
2
β0
α0
(ln2 Λ− ln2 bc
)+
1
2
(1 +
1
2
β20
α20
)ln
Λ
bc+
+1
2
β20
α20
1
b2c
]+ 2 ΩxΩy `
[1
4
β0
α0
(1− β0
α0
)Λ2−
− 1
2
β0
α0Λ2 ln Λ− `2
3
(β2
0
α20
− 1
2
)ln
Λ
bc
](16.89)
and finally, using the definitions of α0 and β0 in
δ0 =β0
α0=µ0 + λ0
µ0, (16.90)
can be rewritten as
WT⊥ =
µ0α20
π
(Ω2x + Ω2
y
) `33
[1
3
(ln3 Λ− ln3 bc
)+
+1
2δ0(ln2 Λ− ln2 bc
)+
1
2
(1 +
1
2δ20
)ln
Λ
bc+
+1
2δ20
1
b2c
]+ 2 ΩxΩy `
[1
4δ0(1− δ0
)Λ2−
− 1
2δ0 Λ2 ln Λ− `2
3
(δ20 −
1
2
)ln
Λ
bc
].
(16.91)
We see that the twist disclination transverse strain energy WT⊥ has a
portion which is proportional to the length of the disclination, and onewhich is proportional to the space volume of the disclination. Thistransverse strain energy for the twist disclination shows the most func-tional diversity of all defects considered in this chapter and offers a richset of possibilities.

242

Chapter 17
Defect Interactions in Quantum Physics
§17.1 Defect interactions in STCED
In chapter 14, we saw how STCED provides a framework for quantumphysics based on defects in the spacetime continuum. In particular,dislocations and disclinations were identified with bosons and fermionsrespectively in section §14.4. We have discussed the quantum and en-ergy characteristics of stationary dislocations and disclinations and theassociation of these defects to fundamental quantum particles in chapter15, and their strain energy in the stationary and moving case in chapter16.
In this chapter, we consider the interactions of defects in STCED,and how they relate to quantum physics. We have briefly considered thistopic in section §14.5. In STCED, the interaction of dislocations anddisclinations is mediated through the interaction of their strain energydensity.
We find that this interaction of the strain energy density resultsfrom the overlap of the strain energy densities of defects, a process akinto the wavefunction overlap of quantum mechanics, which is physicallyexplained by this process in STCED. One source of this overlap inter-action comes from displacement defect interactions of different types ofdefects, characterized by their Burgers and Frank vectors as derived inthe next section §17.2. Another results from the overlap of the strainenergy densities of multiple defects, including of the same type as shownin section §17.4.
We will then explore in greater details how Feynman diagrams arerelevant to STCED quantum physics. As discussed in section §14.5, therole played by virtual particles in quantum electrodynamics (QED) willbe shown to be replaced by the interaction of the strain energy densityof the dislocations and disclinations in STCED.
§17.2 Displacement defect interactions
As mentioned in section §10.5, we consider the interaction terms of dislo-cations and disclinations arising from the general displacements derivedfrom the general combined deWit dislocation displacements (9.128) anddisclination displacements (10.76).

244 Chapter 17 Defect Interactions in Quantum Physics
As seen in section §10.2 for the combined Volterra dislocation anddisclination displacements, the combined deWit dislocation and discli-nation displacements are obtained by adding the dislocation displace-ments (9.128) and disclination displacements (10.76) to obtain
ux =bx2π
(θ + β0
xy
r2
)+
by2π
(α0 ln r + β0
y2
r2
)−
− Ωx2π
z
(α0 ln r + β0
y2
r2
)+
Ωy2π
z(θ + β0
xy
r2
)−
− Ωz2π
(y θ − α0 x (ln r − 1))
uy = − bx2π
(α0 ln r + β0
x2
r2
)+
by2π
(θ − β0
xy
r2
)−
− Ωx2π
z(θ − β0
xy
r2
)− Ωy
2πz
(α0 ln r + β0
x2
r2
)+
+Ωz2π
(x θ + α0 y (ln r − 1))
uz =bz2π
θ +Ωx2π
(y θ − α0 x (ln r − 1))−
− Ωy2π
(x θ + α0 y (ln r − 1))
(17.1)
where
α0 =µ0
2µ0 + λ0(17.2)
β0 =µ0 + λ0
2µ0 + λ0. (17.3)
The components of the strain tensor in cartesian coordinates arederived from εµν = 1
2 (uµ;ν + uν;µ). As this is a linear operation, thecombined components of the strain tensor are obtained by adding thedislocation strain tensor components (9.131) and the disclination straintensor components (10.79):
εxx = − bx2π
(α0
y
r2+ β0
2x2y
r4
)+
by2π
(α0
x
r2− β0
2xy2
r4
)−
− Ωx2π
z
(α0
x
r2− 2β0
xy2
r4
)−
(17.4)

§17.2 Displacement defect interactions 245
− Ωy2π
z
(α0
y
r2+ 2β0
x2y
r4
)+
Ωz2π
(α0 ln r + β0
y2
r2
)εyy = − bx
2π
(α0
y
r2− β0
2x2y
r4
)+
by2π
(α0
x
r2+ β0
2xy2
r4
)−
− Ωx2π
z
(α0
x
r2+ 2β0
xy2
r4
)−
− Ωy2π
z
(α0
y
r2− 2β0
x2y
r4
)+
Ωz2π
(α0 ln r + β0
x2
r2
)εzz = 0
εxy =bx2π
β0
(x
r2− 2xy2
r4
)− by
2πβ0
(y
r2− 2x2y
r4
)+
+Ωx2π
z β0
(y
r2− 2x2y
r4
)+
+Ωy2π
z β0
(x
r2− 2xy2
r4
)− Ωz
2πβ0xy
r2
εyz =bz4π
x
r2+
Ωx2π
β0xy
r2− Ωy
2π
(α0 ln r + β0
x2
r2
)εzx = − bz
4π
y
r2− Ωx
2π
(α0 ln r + β0
y2
r2
)+
Ωy2π
β0xy
r2.
The volume dilatation ε for the discrete dislocation line is then givenby
ε = εαα = εxx + εyy + εzz . (17.5)
Substituting for εxx, εyy and εzz from (17.4), we obtain
ε = − 1
π
µ0
2µ0 + λ0
bxy − byxr2
−
− 1
π
µ0
2µ0 + λ0(Ωxx+ Ωyy)
z
r2+
+Ωzπ
(µ0
2µ0 + λ0ln r +
1
2
µ0 + λ0
2µ0 + λ0
).
(17.6)
The mass energy density is calculated from (2.24), viz.
ρc2 = 4κ0 ε = 2(2λ0 + µ0) ε .

246 Chapter 17 Defect Interactions in Quantum Physics
Substituting for ε from (17.6), using the absolute value of ε as persection §9.3.4, the mass energy density of the discrete dislocation line isgiven by
ρc2 =
∣∣∣∣ 4π κ0µ0
2µ0 + λ0
bxy − byxr2
−
+4
π
κ0µ0
2µ0 + λ0(Ωxx+ Ωyy)
z
r2+
− 4κ0Ωzπ
(µ0
2µ0 + λ0ln r +
1
2
µ0 + λ0
2µ0 + λ0
) ∣∣∣∣(17.7)
and using α0 and β0,
ρc2 =
∣∣∣∣ 4π κ0α0bxy − byx
r2−
+4
πκ0α0 (Ωxx+ Ωyy)
z
r2+
− 4κ0Ωzπ
(α0 ln r +
1
2β0
) ∣∣∣∣ .(17.8)
The rest-mass density is thus the sum of the rest-mass density of edgedislocations, wedge and twist disclinations. Screw dislocations are notpresent as they are massless. The negative terms indicate a decrease intotal rest-mass energy due to bound states.
§17.2.1 Dislocation-dislocation interactions
The strain energy density of the discrete dislocation line is calculatedusing (9.133) in (9.50) as seen previously in §9.5. The discrete disloca-tion line longitudinal dilatation strain energy density is then given by(9.139),
E‖ =1
2π2
κ0 µ20
(2µ0 + λ0)2
(bxy − byx)2
r4. (17.9)
There is no longitudinal interaction strain energy density between edgedislocations and screw dislocations, as the latter are massless.
Comparing this result with (9.68) corresponding to an edge dislo-cation with the Burgers vector along the x − axis as per Fig. ??, theresult is the same as the bxy term of (17.9). Similarly, we see that thebyx term of (17.9) corresponds to an edge dislocation with the Burgersvector along the y − axis. Considering (17.9), we note that in the case

§17.2 Displacement defect interactions 247
of two edge dislocations with Burgers vectors bx and by respectively, thelongitudinal overlap interaction strain energy density between the edgedislocations along bx and by respectively would be given by
EE−E‖ int = −4κ0α20
bxxbyy
r4(17.10)
where b = b/2π. The negative sign represents a reduction in the overallinteraction energy of the two edge dislocations.
As seen previously in §9.5, the distortion strain energy density iscalculated from (9.51), viz.
E⊥ = µ0eαβeαβ ,
and using (9.20), viz.eαβ = εαβ − esgαβ
where es = 14 ε, (9.51) simplifies to
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (17.11)
This expression is expanded using the non-zero elements of the straintensor (9.131) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 + 2εyz2 + 2εxz
2 − 14 ε
2). (17.12)
Substituting from (9.131) and (9.133) in the above and simplifying, weobtain (9.145):
E⊥ =µ0
8π2
b2zr2
+µ0
4π2α2
0
(bxy − byx)2
r4+
+µ0
2π2β2
0
(bxx+ byy)2
r4− 3
2π2
µ0λ0
2µ0 + λ0
bxbyxy
r4.
(17.13)
As seen previously in §9.5, setting bz = 0 and by = 0 in the above,we obtain the distortion strain energy density expression (9.75) for thestationary edge dislocation.
Substituting from (9.138) and (9.139), (17.13) becomes
E⊥ =µ0
8π2
b2zr2
+1
2
µ0
κ0E‖ + 2µ0
(µ0 + λ0
2µ0 + λ0
)2
ω2z−
− 3
2π2
µ0λ0
2µ0 + λ0
bxbyxy
r4.
(17.14)

248 Chapter 17 Defect Interactions in Quantum Physics
The first term is the screw dislocation strain energy density of (9.22),the second term is proportional to the edge dislocation distortion strainenergy density arising from the longitudinal strain energy density of(9.139), the third term is the edge dislocation distortion strain energydensity arising from the rotation vector of (9.138) and the last termis a moment distortion strain energy density term. It is interesting tonote that there are no interaction terms (cross-terms) between screwand edge dislocations for a dislocation line. However, as we will see insection §18.4.1, a dislocation line does exhibit self-energy processes.
§17.2.2 Disclination-disclination interactions
The strain energy density of the discrete disclination line is calculatedusing (10.81) in (9.50) as seen previously in §10.5. The discrete discli-nation longitudinal dilatation strain energy density is then given by
E‖ =κ0
2π2
[Ωz
(α0 ln r +
1
2β0
)− α0 (Ωxx+ Ωyy)
z
r2
]2
. (17.15)
This can be written as
E‖ = EW‖ + ET‖ + EW−T‖ int (17.16)
where EW‖ is given by (10.104), ET‖ is given by (10.124) and
EW−T‖ int = − κ0
π2α0 (Ωxx+ Ωyy)
Ωzz
r2
(α0 ln r +
1
2β0
)(17.17)
is the interaction longitudinal strain energy density between the wedgeand twist disclinations. The negative sign indicates an attractive force.
The distortion strain energy density is calculated from (9.51), viz.
E⊥ = µ0eαβeαβ .
As seen previously, using (9.20), viz.
eαβ = εαβ − esgαβ
where es = 14 ε, (9.51) simplifies to
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (17.18)
This expression is expanded using the non-zero elements of the straintensor (10.79) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 − 14 ε
2). (17.19)

§17.2 Displacement defect interactions 249
Substituting from (10.79) and (10.81) in the above, we note that E⊥ canbe separated in the following terms:
E⊥ = EW⊥ + ET⊥ + EW−T⊥ int (17.20)
where EW⊥ is the wedge disclination distortion strain energy densitygiven by (10.108), ET⊥ is the twist disclination distortion strain energydensity given by (10.127) and EW−T⊥ int is the wedge-twist disclinationinteraction distortion strain energy density between the wedge and twistdisclinations given by (10.92):
EW−T⊥ int = − µ0ΩxΩz2π2
xz
r2
[2α2
0 ln r + α0β0 + β20
y2
r2
(1− 2y2
r2
)]− µ0ΩyΩz
2π2
yz
r2
[2α2
0 ln r + α0β0 + β20
x2
r2
(1− 2x2
r2
)].
(17.21)
It is important to note that the interactions involve separate longitudinaland distortion expressions.
§17.2.3 Dislocation-disclination interactions
In this section, we consider the interaction terms of dislocations anddisclinations arising from the general displacements derived from thegeneral combined deWit dislocation displacements (9.128) and disclina-tion displacements (10.76) given by (17.1).
We calculate the dislocation-disclination interaction strain energydensity by first calculating the longitudinal dilatation strain energy den-sity (E‖) of the general dislocation-disclination using (10.81) in (9.50)as seen previously in §10.5, from the general strain tensor (17.4). Usingthe non-zero elements of the strain tensor (17.4) in the dilatation (17.5),we use
E‖ = 12 κ0
(εxx
2 + εyy2 + 2εxxεyy
). (17.22)
We also calculate the distortion strain energy density (E⊥) as donepreviously from (9.51), viz.
E⊥ = µ0eαβeαβ .
As seen previously, using (9.20), viz.
eαβ = εαβ − esgαβ
where es = 14 ε, (9.51) simplifies to
E⊥ = µ0
(εαβεαβ − 1
4 ε2). (17.23)

250 Chapter 17 Defect Interactions in Quantum Physics
This expression is expanded using the non-zero elements of the straintensor (17.4) to give
E⊥ = µ0
(εxx
2 + εyy2 + 2εxy
2 + 2εyz2 + 2εyz
2 − 14 ε
2). (17.24)
Some of the terms resulting from the computation have alreadybeen calculated for dislocations only and for disclinations only, includ-ing the dislocation-dislocation interaction terms and the disclination-disclination interaction terms as seen in the previous sections §17.2.1and §17.2.2 respectively. In calculating the dislocation-disclination in-teraction terms from the general strain tensor (17.4), we will grouptogether the terms combining Burgers and Frank vector components.
We first provide a complete high-level overview of the strain energydensity terms that will be obtained from the above computation. Weinclude the terms that have already been calculated with a reference tothe equation numbers for the results.
The strain energy density E is first separated into the dislocationstrain energy density EDt where Dt represents the dislocation (a trans-lation), the disclination strain energy density EDr where Dr representsthe disclination (a rotation), and the dislocation-disclination interactionstrain energy density EDt−Dr
int , according to
E = EDt + EDr + EDt−Drint . (17.25)
Dislocations (Dt) consist of screw (S) and edge (E) dislocations, anddisclinations (Dr) consist of wedge (W ) and twist (T ) disclinations.This is summarized as follows:
Dt = S,E (17.26)
Dr = W,T . (17.27)
The strain energy density E is further separated into a longitudi-nal dilatation strain energy density (E‖) and a distortion strain energydensity (E⊥) as seen above. This applies to both dislocations and discli-nations, and hence we can write (17.25) as
E = EDt
‖ + EDt
⊥ + EDr
‖ + EDr
⊥ + EDt−Drint . (17.28)
The interaction term EDt−Drint can also be separated along similar lines,
and the details are covered further in this section. We now consider theindividual terms of (17.25).

§17.2 Displacement defect interactions 251
The dislocation strain energy density EDt can be further separatedinto the following terms:
EDt = ES‖︸︷︷︸=0
+ EE‖︸︷︷︸(9.68)︸ ︷︷ ︸
(9.139)
+ ES⊥︸︷︷︸(9.22)
+ EE⊥︸︷︷︸(9.78)︸ ︷︷ ︸
(9.146)
(17.29)
where ES‖ is the screw dislocation dilatation strain energy density, which
is equal to 0, EE‖ is the edge dislocation dilatation strain energy density,
ES⊥ is the screw dislocation distortion strain energy density, and EE⊥ isthe edge dislocation distortion strain energy density. It is importantto note that there is no interaction strain energy density arising fromthe dislocation displacements, due to their translation nature, althoughthere is an interaction strain energy density that arises from the overlapof dislocations of the same type as we will see in later sections.
The disclination strain energy density EDr can be further separatedinto the following terms:
EDr = EW‖︸︷︷︸(10.103)
+ ET‖︸︷︷︸(10.124)︸ ︷︷ ︸
(10.87)
+ EW−T‖ int︸ ︷︷ ︸(17.17)
+ EW⊥︸︷︷︸(10.108)
+ ET⊥︸︷︷︸(10.128)
+ EW−T⊥ int︸ ︷︷ ︸(17.21)︸ ︷︷ ︸
(10.93)
(17.30)
where EW‖ is the wedge disclination dilatation strain energy density, ET‖is the twist disclination dilatation strain energy density, EW−T‖ int is the
wedge-twist interaction dilatation strain energy density, EW⊥ is the wedgedisclination distortion strain energy density, ET⊥ is the twist disclinationdistortion strain energy density, and EW−T⊥ int is the wedge-twist inter-action distortion strain energy density. It is important to note thatin this case there is interaction strain energy density arising from thedisclination displacements, due to their rotational nature.
The dislocation-disclination interaction strain energy densityEDt−Drint
will be calculated in this section, and can be further separated into thefollowing terms:
EDt−Drint = EE−W‖ int︸ ︷︷ ︸
bx,yΩz
+ EE−T‖ int︸ ︷︷ ︸bx,yΩx,y︸ ︷︷ ︸
EDt−Dr‖ int
+ ES−T⊥ int︸ ︷︷ ︸bzΩx,y
+ EE−W⊥ int︸ ︷︷ ︸bx,yΩz
+ EE−T⊥ int︸ ︷︷ ︸bx,yΩx,y︸ ︷︷ ︸
EDt−Dr⊥ int
(17.31)
where EE−W‖ int is the edge-wedge interaction dilatation strain energy den-
sity (bx,yΩz terms), EE−T‖ int is the edge-twist interaction dilatation strain

252 Chapter 17 Defect Interactions in Quantum Physics
energy density (bx,yΩx,y terms), ES−T⊥ int is the screw-twist interaction dis-
tortion strain energy density (bzΩx,y terms), EE−W⊥ int is the edge-wedge
interaction distortion strain energy density (bx,yΩz terms), and EE−T⊥ int
is the edge-twist interaction distortion strain energy density (bx,yΩx,yterms).
We calculate the individual dislocation-disclination interaction termsof (17.31) by substituting for the strain tensor (17.4) and the dilatation(17.6) in (17.22) and (17.24) to calculate the combination of Burgersand Frank vector components indicated in (17.31) for each term.
The edge-wedge interaction dilatation strain energy density EE−W‖ intis calculated from the bx,yΩz terms to obtain
EE−W‖ int = − κ0bxΩz4π2
y
r2
[3α0
(2α0 ln r + β0
)+ β2
0
x2(x2 − y2)
r4
]+κ0byΩz
4π2
x
r2
[3α0
(2α0 ln r + β0
)− β2
0
y2(x2 − y2)
r4
] (17.32)
which can be simplified to
EE−W‖ int = − κ0Ωz4π2
[3α0
bxy − byxr2
(2α0 ln r + β0
)+
+ β20 (bxx− byy)
xy(x2 − y2)
r6
].
(17.33)
The edge-twist interaction dilatation strain energy density EE−T‖ int is
calculated from the bx,yΩx,y terms to obtain
EE−T‖ int =κ0bxΩx
2π2z
(3α2
0
xy
r4+ 4β2
0
x3y3
r8
)−
− κ0byΩy2π2
z
(3α2
0
xy
r4+ 4β2
0
x3y3
r8
)+
+κ0bxΩy
2π2z
(3α2
0
y2
r4− 4β2
0
x4y2
r8
)−
− κ0byΩx2π2
z
(3α2
0
x2
r4− 4β2
0
x2y4
r8
)(17.34)

§17.2 Displacement defect interactions 253
which can be simplified to
EE−T‖ int =κ0
2π2(bxΩx − byΩy)
xyz
r4
(3α2
0 + 4β20
x2y2
r4
)+
+κ0bxΩy
2π2
y2z
r4
(3α2
0 − 4β20
x4
r4
)−
− κ0byΩx2π2
x2z
r4
(3α2
0 − 4β20
y4
r4
).
(17.35)
The screw-twist interaction distortion strain energy density ES−T⊥ int
is calculated from the bzΩx,y terms to obtain
ES−T⊥ int =µ0bzΩx
2π2
y
r2
(α0 ln r + β0
)−
− µ0bzΩy2π2
x
r2
(α0 ln r + β0
) (17.36)
which can be simplified to
ES−T⊥ int =µ0bz2π2
Ωxy − Ωyx
r2
(α0 ln r + β0
). (17.37)
The edge-wedge interaction distortion strain energy density EE−W⊥ int
is calculated from the bx,yΩz terms to obtain
EE−W⊥ int = − µ0bxΩz2π2
y
r2
[α0
(α0 ln r + 1
2 β0
)+ 2β2
0
x2y2
r4
]+
+µ0byΩz
2π2
x
r2
[α0
(α0 ln r + 1
2 β0
)+ 2β2
0
x2y2
r4
] (17.38)
which can be simplified to
EE−W⊥ int = − µ0Ωz2π2
bxy − byxr2
[α0
(α0 ln r + 1
2 β0
)+ 2β2
0
x2y2
r4
]. (17.39)
The edge-twist interaction distortion strain energy density EE−T⊥ int is

254 Chapter 17 Defect Interactions in Quantum Physics
calculated from the bx,yΩx,y terms to obtain
EE−T⊥ int =µ0bxΩxπ2
(α2
0 − β20
) xyzr4−
− µ0byΩyπ2
(α2
0 − β20
) xyzr4
+
+µ0bxΩyπ2
(β2
0x2 + α2
0y2) z
r4−
− µ0byΩxπ2
(α2
0x2 + β2
0y2) z
r4
(17.40)
which can be simplified to
EE−T⊥ int = − µ0γ0
π2(bxΩx − byΩy)
xyz
r4+
+µ0α
20
π2
(bxΩyy
2 − byΩxx2) z
r4+
+µ0β
20
π2
(bxΩyx
2 − byΩxy2) z
r4
(17.41)
where
γ0 =λ0
2µ0 + λ0. (17.42)
These elements form the basis of the calculation of defect displace-ment interactions in quantum physics in the following sections.
§17.3 Displacement defect interaction strain energy
In this section, we consider the interaction of defects as mediated bytheir strain energy. We consider the longitudinal dilatation strain energyW‖ and the transverse distortion strain energy W⊥ for the dislocation-dislocation, disclination-disclination and dislocation-disclination displa-cement defect interactions considered in section §17.2.
§17.3.1 Dislocation-dislocation interactions
There is no longitudinal interaction strain energy density between edgedislocations and screw dislocations, as the latter are massless. As we sawin (17.14) for the transverse interaction strain energy density, there areno displacement interaction terms (cross-terms) either between screwand edge dislocations for a general dislocation line. Hence there is no

§17.3 Displacement defect interaction strain energy 255
displacement interaction strain energy for dislocation-dislocation inter-actions. However, as we will see in section §18.4.1, a dislocation linedoes exhibit self-energy processes.
§17.3.2 Disclination-disclination interactions
Wedge disclination - twist disclination interaction. The lon-gitudinal strain energy for the interaction between the wedge and twistdisclinations is calculated from
WW−T‖ int =
∫V
EW−T‖ int dV. (17.43)
Substituting for EW−T‖ int from (17.17), this equation becomes
WW−T‖ int = −
∫V
κ0
π2α0 (Ωxx+ Ωyy)
Ωzz
r2
(α0 ln r +
1
2β0
)dV (17.44)
where V is the volume of the interacting disclinations, with dV givenby rdr dθ dz in cylindrical polar coordinates. As before, we take Ω outof the integral from (14.5), and write (17.44) as
WW−T‖ int =
κ0
π2α0Ωz
∫ `
0
∫ 2π
0
∫ Λ
bc
(Ωxx+ Ωyy)
z
r2
(α0 ln r +
1
2β0
)rdr dθ dz
(17.45)
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgersvector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Evaluating the integral over z, (17.45) becomes
WW−T‖ int =
κ0
2π2α0Ωz`
2
∫ 2π
0
∫ Λ
bc
(Ωx cos θ + Ωy sin θ)(α0 ln r +
1
2β0
)dr dθ
(17.46)
where we have used the relations cos θ = x/r and sin θ = y/r. Again,the integral over z cannot be handled by considering the strain energy

256 Chapter 17 Defect Interactions in Quantum Physics
per unit length of the disclination due to the `2 (area) dependence.Evaluating the integral over θ [281], we obtain
WW−T‖ int =
κ0
2π2α0Ωz`
2
∫ Λ
bc
[(Ωx sin θ − Ωy cos θ)(
α0 ln r +1
2β0
)]2π
0
z2 dz .
(17.47)
Applying the limits of integration, (17.47) becomes
WW−T‖ int = 0 . (17.48)
Hence there is no longitudinal interaction between wedge and twistdisclinations. Considering Fig. 10.1, we see that the Frank vectors areperpendicular for those disclinations, and hence the result is to be ex-pected.
The transverse strain energy for the interaction between the wedgeand twist disclinations is calculated from
WW−T⊥ int =
∫V
EW−T⊥ int dV. (17.49)
Substituting for EW−T⊥ int from (17.21), this equation becomes
WW−T⊥ int = − µ0Ωz
2π2
∫V
Ωxxz
r2
[2α2
0 ln r + α0β0+
+ β20
(y2
r2− 2y4
r4
)]+
Ωyyz
r2
[2α2
0 ln r+
+ α0β0 + β20
(x2
r2− 2x4
r4
)]dV
(17.50)
where V is the volume of the interacting disclinations, with dV givenby rdr dθ dz in cylindrical polar coordinates. As before, we take Ω outof the integral from (14.5), and write (17.50) as
WW−T⊥ int = − µ0Ωz
2π2
∫ `
0
∫ 2π
0
∫ Λ
bc
Ωxxz
r2
[2α2
0 ln r + α0β0+
+ β20
(y2
r2− 2y4
r4
)]+
Ωyyz
r2
[2α2
0 ln r+
+ α0β0 + β20
(x2
r2− 2x4
r4
)]rdr dθ dz
(17.51)

§17.3 Displacement defect interaction strain energy 257
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgersvector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Evaluating the integral over z, (17.51) becomes
WW−T⊥ int = − µ0Ωz
4π2`2∫ 2π
0
∫ Λ
bc
Ωx cos θ
[2α2
0 ln r + α0β0+
+ β20
(sin2 θ − 2 sin4 θ
) ]+ Ωy sin θ
[2α2
0 ln r+
+ α0β0 + β20
(cos2 θ − 2 cos4 θ
) ]dr dθ
(17.52)
where we have used the relations cos θ = x/r and sin θ = y/r. Again,the integral over z cannot be handled by considering the strain energyper unit length of the disclination due to the `2 (area) dependence.Evaluating the integral over θ [281], we obtain
WW−T⊥ int = − µ0Ωz
4π2`2∫ Λ
bc
Ωx
[2α2
0 ln r sin θ + α0β0 sin θ+
+ β20
(1
3sin3 θ − 2
5sin5 θ
)]− Ωy
[2α2
0 ln r cos θ+
+ α0β0 cos θ + β20
(1
3cos3 θ − 2
5cos5 θ
)]∣∣∣∣2π0
(17.53)
Applying the limits of integration, (17.53) becomes
WW−T⊥ int = 0 . (17.54)
Hence we find that there is no transverse interaction between wedge andtwist disclinations, in agreement with the perpendicularity of the dislo-cation Frank vectors as seen in Fig. 10.1. As in the case of dislocation-dislocation interactions, there is no displacement interaction strain en-ergy for disclination-disclination interactions.
§17.3.3 Dislocation-disclination interactions
In this section, we consider the interaction terms of dislocations anddisclinations.

258 Chapter 17 Defect Interactions in Quantum Physics
Edge dislocation - wedge disclination interaction. The longitu-dinal strain energy for the interaction between the edge dislocation andthe wedge disclination is calculated from
WE−W‖ int =
∫V
EE−W‖ int dV. (17.55)
Substituting for EE−W‖ int from (17.33), this equation becomes
WE−W‖ int = −
∫V
κ0Ωz4π2
[3α0
bxy − byxr2
(2α0 ln r + β0
)+
+ β20 (bxx− byy)
xy(x2 − y2)
r6
]dV
(17.56)
where V is the volume of the interacting defects, with dV given byrdr dθ dz in cylindrical polar coordinates. As before, we take Ω out ofthe integral from (14.5), and the integral over z is handled by consideringthe strain energy per unit length of the interaction:
WE−W‖ int
`= − κ0Ωz
4π2
∫ 2π
0
∫ Λ
bc
[3α0
bxy − byxr2
(2α0 ln r + β0
)+
+ β20 (bxx− byy)
xy(x2 − y2)
r6
]rdr dθ
(17.57)
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgersvector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Using the relations cos θ = x/r and sin θ = y/r, (17.57) can bewritten as
WE−W‖ int
`= − κ0Ωz
4π2
∫ 2π
0
∫ Λ
bc
[3α0 (bx sin θ − by cos θ)(
2α0 ln r + β0
)+ β2
0 (bx cos θ − by sin θ)
cos θ sin θ(cos2 θ − sin2 θ
) ]dr dθ .
(17.58)

§17.3 Displacement defect interaction strain energy 259
Evaluating the integral over θ [281], we obtain
WE−W‖ int
`= − κ0Ωz
4π2
∫ Λ
bc
[3α0 (−bx cos θ − by sin θ)
(2α0 ln r + β0
)+ β2
0 bx
(−1
5cos5 θ − 1
30cos3 θ (3 cos 2θ − 7)
)−
− β20 by
(1
30sin3 θ (3 cos 2θ + 7)− 1
5sin5 θ
)]2π
0
dr .
(17.59)
Applying the limits of integration, (17.59) becomes
WE−W‖ int
`= 0 . (17.60)
Hence we find that there is no longitudinal interaction between the edgedislocation and the wedge disclination. We note that the Burgers andFrank vectors are perpendicular.
The transverse strain energy for the interaction between the edgedislocation and the wedge disclination is calculated from
WE−W⊥ int =
∫V
EE−W⊥ int dV. (17.61)
Substituting for EE−W⊥ int from (17.39), this equation becomes
WE−W⊥ int = −
∫V
µ0Ωz2π2
bxy − byxr2[
α0
(α0 ln r + 1
2 β0
)+ 2β2
0
x2y2
r4
]dV
(17.62)
where V is the volume of the interacting defects, with dV given byrdr dθ dz in cylindrical polar coordinates. As before, we take Ω out ofthe integral from (14.5), and the integral over z is handled by consideringthe strain energy per unit length of the disclination:
WE−W⊥ int
`= − µ0Ωz
2π2
∫ 2π
0
∫ Λ
bc
bxy − byxr2[
α0
(α0 ln r + 1
2 β0
)+ 2β2
0
x2y2
r4
]rdr dθ
(17.63)
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgers

260 Chapter 17 Defect Interactions in Quantum Physics
vector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Using the relations cos θ = x/r and sin θ = y/r, (17.63) can bewritten as
WE−W⊥ int
`= − µ0Ωz
2π2
∫ 2π
0
∫ Λ
bc
(bx sin θ − by cos θ)[α0
(α0 ln r + 1
2 β0
)+ 2β2
0 cos2 θ sin2 θ]
dr dθ .
(17.64)
Evaluating the integral over θ [281], we obtain
WE−W⊥ int
`=µ0Ωz2π2
∫ Λ
bc
[α0
(α0 ln r + 1
2 β0
)(bx cos θ + by sin θ) +
+ 2β20 bx
1
30cos3 θ (3 cos 2θ − 7)−
− 2β20 by
1
30sin3 θ (3 cos 2θ + 7)
]2π
0
dr .
(17.65)
Applying the limits of integration, (17.65) becomes
WE−W⊥ int
`= 0 . (17.66)
Hence we find that there is no transverse interaction between the edgedislocation and the wedge disclination and there is no displacementinteraction strain energy for edge dislocation-wedge disclination inter-actions.
Edge dislocation - twist disclination interaction. The longitu-dinal strain energy for the interaction between the edge dislocation andthe twist disclination is calculated from
WE−T‖ int =
∫V
EE−T‖ int dV. (17.67)
Substituting for EE−T‖ int from (17.35), this equation becomes
WE−T‖ int =
∫V
[κ0
2π2(bxΩx − byΩy)
xyz
r4
(3α2
0 + 4β20
x2y2
r4
)+
+κ0bxΩy
2π2
y2z
r4
(3α2
0 − 4β20
x4
r4
)−
− κ0byΩx2π2
x2z
r4
(3α2
0 − 4β20
y4
r4
)]dV
(17.68)

§17.3 Displacement defect interaction strain energy 261
where V is the volume of the wedge disclination, with dV given byrdr dθ dz in cylindrical polar coordinates. As before, we take Ω out ofthe integral from (14.5), and write (17.68) as
WE−T‖ int =
κ0
2π2
∫ `
0
∫ 2π
0
∫ Λ
bc
[bxΩx
xyz
r4
(3α2
0 + 4β20
x2y2
r4
)−
− byΩyxyz
r4
(3α2
0 + 4β20
x2y2
r4
)+
+ bxΩyy2z
r4
(3α2
0 − 4β20
x4
r4
)−
− byΩxx2z
r4
(3α2
0 − 4β20
y4
r4
)]rdr dθ dz
(17.69)
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgersvector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Evaluating the integral over z, (17.69) becomes
WE−T‖ int =
κ0
4π2`2∫ 2π
0
∫ Λ
bc[bxΩxr
cos θ sin θ(3α2
0 + 4β20 cos2 θ sin2 θ
)−
− byΩyr
cos θ sin θ(3α2
0 + 4β20 cos2 θ sin2 θ
)+
+bxΩyr
sin2 θ(3α2
0 − 4β20 cos4 θ
)−
− byΩxr
cos2 θ(3α2
0 − 4β20 sin4 θ
) ]dr dθ
(17.70)
where we have used the relations cos θ = x/r and sin θ = y/r. Again,the integral over z cannot be handled by considering the strain energyper unit length of the disclination due to the `2 (area) dependence.

262 Chapter 17 Defect Interactions in Quantum Physics
Evaluating the integral over θ [281], we obtain
WE−T‖ int =
κ0
4π2`2∫ Λ
bc
[− bxΩx
r3α2
0
(1
2cos2 θ
)+
+bxΩxr
4β20
(1
192(cos 6θ − 9 cos 2θ)
)+
+byΩyr
(3α2
0
1
2cos2 θ − 4β2
0
1
192(cos 6θ − 9 cos 2θ)
)+
+bxΩyr
3α20
(1
2(θ − sin θ cos θ)
)−
− bxΩyr
4β20
(θ
16+
1
64sin 2θ − 1
64sin 4θ − 1
192sin 6θ
)−
− byΩxr
3α20
(1
2(θ + sin θ cos θ)
)+
+byΩxr
4β20
(θ
16− 1
64sin 2θ − 1
64sin 4θ +
1
192sin 6θ
)]2π
0
dr .
(17.71)
Applying the limits of integration, (17.71) becomes
WE−T‖ int =
κ0
4π2`2∫ Λ
bc
[bxΩyr
(3πα2
0 −π
2β2
0
)−
− byΩxr
(3πα2
0 −π
2β2
0
)]dr .
(17.72)
Integrating over r, we obtain
WE−T‖ int =
κ0
4π`2(3α2
0 − 12 β
20
)(bxΩy − byΩx) ln
Λ
bc. (17.73)
Hence we find that there is a longitudinal interaction between the edgedislocation and the twist disclination which depends on the area of thedefect. Only bx,y and Ωx,y cross-terms interact. The displacement inter-action strain energy for edge dislocation-twist disclination interactionsis of the form b×Ω.
The transverse strain energy for the interaction between the edgedislocation and the twist disclination is calculated from
WE−T⊥ int =
∫V
EE−T⊥ int dV. (17.74)

§17.3 Displacement defect interaction strain energy 263
Substituting for EE−T⊥ int from (17.41), this equation becomes
WE−T⊥ int = −
∫V
µ0γ0
π2(bxΩx − byΩy)
xyz
r4+
+µ0α
20
π2
(bxΩyy
2 − byΩxx2) z
r4+
+µ0β
20
π2
(bxΩyx
2 − byΩxy2) z
r4dV
(17.75)
where as per (17.42)
γ0 =λ0
2µ0 + λ0
and where V is the volume of the wedge disclination, with dV given byrdr dθ dz in cylindrical polar coordinates. As before, we take Ω out ofthe integral from (14.5), and write (17.75) as
WE−T⊥ int =
µ0
π2
∫ `
0
∫ 2π
0
∫ Λ
bc
[− γ0 (bxΩx − byΩy)
xyz
r4+
+ α20
(bxΩyy
2 − byΩxx2) z
r4+
+ β20
(bxΩyx
2 − byΩxy2) z
r4
]rdr dθ dz
(17.76)
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgersvector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Evaluating the integral over z, (17.76) becomes
WE−T⊥ int =
µ0
2π2`2∫ 2π
0
∫ Λ
bc
[− γ0
bxΩx − byΩyr
cos θ sin θ+
+ α20
(bxΩyr
sin2 θ − byΩxr
cos2 θ
)+
+ β20
(bxΩyr
cos2 θ − byΩxr
sin2 θ
)]dr dθ
(17.77)
where we have used the relations cos θ = x/r and sin θ = y/r. Again,the integral over z cannot be handled by considering the strain energyper unit length of the disclination due to the `2 (area) dependence.

264 Chapter 17 Defect Interactions in Quantum Physics
Evaluating the integral over θ [281], we obtain
WE−T⊥ int =
µ0
2π2`2∫ Λ
bc
[γ0bxΩx − byΩy
r
(1
2cos2 θ
)+
+α2
0
2
(bxΩyr
(θ − sin θ cos θ)− byΩxr
(θ + sin θ cos θ)
)+
+β2
0
2
(bxΩyr
(θ + sin θ cos θ)− byΩxr
(θ − sin θ cos θ)
)]2π
0
dr .
(17.78)
Applying the limits of integration, (17.78) becomes
WE−T⊥ int =
µ0
2π2`2∫ Λ
bc
[πα2
0
(bxΩyr− byΩx
r
)+
+πβ20
(bxΩyr− byΩx
r
)]dr .
(17.79)
Integrating over r, we obtain
WE−T⊥ int =
µ0
2π`2(α2
0 + β20
)(bxΩy − byΩx) ln
Λ
bc. (17.80)
Hence we find that there is also a transverse interaction between theedge dislocation and the twist disclination which depends on the areaof the defect. Again only bx,y and Ωx,y cross-terms interact. The differ-ence between the longitudinal and the transverse interaction lies in theproportionality constants. In both cases, the displacement interactionstrain energy for edge dislocation-twist disclination interactions is of theform b×Ω.
Screw dislocation - twist disclination interaction. We recallthat there is no longitudinal interaction between the screw dislocationand the twist disclination as the screw dislocation does not have a lon-gitudinal component.
The transverse strain energy for the interaction between the screwdislocation and the twist disclination is calculated from
WS−T⊥ int =
∫V
ES−T⊥ int dV. (17.81)
Substituting for ES−T⊥ int from (17.37), this equation becomes
WS−T⊥ int =
∫V
µ0bz2π2
Ωxy − Ωyx
r2
(α0 ln r + β0
)dV (17.82)

§17.4 Overlap interaction of multiple defects 265
where V is the volume of the wedge disclination, with dV given byrdr dθ dz in cylindrical polar coordinates. As before, we take Ω out ofthe integral from (14.5), and the integral over z is handled by consideringthe strain energy per unit length of the disclination:
WS−T⊥ int
`=µ0bz2π2
∫ 2π
0
∫ Λ
bc
Ωxy − Ωyx
r2
(α0 ln r + β0
)rdr dθ (17.83)
where ` is the length of the disclination, bc is the size of the core ofthe disclination, of order b0, the smallest spacetime dislocation Burgersvector, and Λ is a cut-off parameter corresponding to the radial ex-tent of the disclination, limited by the average distance to its nearestneighbours.
Using the relations cos θ = x/r and sin θ = y/r, (17.83) can bewritten as
WS−T⊥ int
`=µ0bz2π2
∫ 2π
0
∫ Λ
bc
(Ωx sin θ − Ωy cos θ)(α0 ln r + β0
)dr dθ .
(17.84)
Evaluating the integral over θ [281], we obtain
WS−T⊥ int
`=µ0bz2π2
∫ Λ
bc
(−Ωx cos θ − Ωy sin θ)
(α0 ln r + β0
) ∣∣∣∣2π0
dr .
(17.85)
Applying the limits of integration, (17.85) becomes
WS−T⊥ int
`= 0 . (17.86)
Hence we find that there is no transverse interaction between the screwdislocation and the twist disclination and there is no displacement inter-action strain energy for screw dislocation-twist disclination interactions.Again we note the perpendicularity of the Burgers and Frank vectors.
§17.4 Overlap interaction of multiple defects
In this section, we consider the interactions of dislocations of multipledefects, including of the same type, which are seen to result from theforce resulting from the overlap of their strain energy density in the

266 Chapter 17 Defect Interactions in Quantum Physics
spacetime continuum [123, see p. 112]. As we have seen in §17.2.1, thereis no longitudinal interaction strain energy density between edge dislo-cations and screw dislocations in a mixed dislocation, as the latter aremassless. In addition, as shown in that section, there are no interactionterms (cross-terms) between screw and edge dislocations for a disloca-tion line which is a mixed dislocation. This is due to the perpendicu-larity of the two types of dislocations. However, multiple dislocationsseparated by a distance R can undergo defect interactions due to theoverlap of their strain energy densities, both dislocation and disclinationinteractions.
These interactions can be calculated using various methods. Tillnow, we have concentrated on the calculation of the strain energy of theoverlap based on the defect displacements. Another approach [273, seechapter 3] that can be used is to calculate the force between the defectsfrom the stress tensor, and obtain the strain energy of the overlap basedon the work W performed by the application of the force F over a givendistance d, from the well-known relation
W = F · d . (17.87)
Conversely, the force can be calculated from the negative of the deriva-tive of the strain energy with position. For example, for a dislocationline parallel to the z-axis positive along the z-axis, the force on thedislocation line can be written as
F = −(∂W
∂x,∂W
∂y
). (17.88)
This allows us to calculate the overlap interaction strain energy.We consider the total strain energy W for two neighbouring defects.
This can be written in terms of the strain energy density E for the twoneighbouring defects as an integral over the volume
W =
∫V
E dV . (17.89)
E can be expressed in terms of the stress density σ using the stresstensor portion of (9.49) to (9.51). Following Weertman [273, see p. 62],as the stress density equations are linear (see section §8.5), we separatethe stress density σ into a sum of two terms
W =
∫V
(σ1 + σ2)2 dV (17.90)

§17.4 Overlap interaction of multiple defects 267
where we have not included the proportionality factor and where σ2 isthe stress density of the defect (dislocation or disclination) of interestin an otherwise strain-free continuum, and σ1, known as the internalstresses, is the stress density of the rest of the continuum including theneighbouring defect(s), but excluding the defect of σ2. Then σ1 + σ2
represents the stress density of a continuum including a defect of interestand internal stresses.
The total strain energy W can then be written as
W =
∫V
σ21 dV +
∫V
σ22 dV + 2
∫V
σ1σ2 dV . (17.91)
The first two terms are position independent. Only the third term isposition dependent, and leads to a force on the defect as per (17.88)and contributes to the interaction strain energy W12 :
W12 = 2
∫V
σ1σ2 dV . (17.92)
§17.4.1 Overlap interaction strain energy
From (1.19) to (1.21) the energy-momentum stress tensor Tαβ is de-composed into a stress deviation tensor tαβ and a scalar ts, accordingto
Tαβ = tαβ + tsgαβ (17.93)
where ts = 14 T
αα. Separating Tαβ into the sum of two terms as per
(17.90), we haveTαβ = 1T
αβ + 2Tαβ , (17.94)
and using (17.93), we obtain
Tαβ = 1tαβ + 1tsg
αβ + 2tαβ + 2tsg
αβ . (17.95)
Hence we can writetαβ = 1t
αβ + 2tαβ
ts = 1ts + 2ts .(17.96)
Going back to (17.89) and using (9.49) to (9.51), we have
W =
∫V
(E‖ + E⊥
)dV (17.97)
where
E‖ =1
32κ0
(ρc2)2 ≡ 1
2κ0t2s (17.98)

268 Chapter 17 Defect Interactions in Quantum Physics
where ρ is the mass energy density of the edge dislocation, and
E⊥ =1
4µ0tαβtαβ . (17.99)
Substituting (17.98) and (17.99) into (17.97), we obtain
W =
∫V
(1
2κ0t2s +
1
4µ0tαβtαβ
)dV (17.100)
and using (17.96), (17.100) becomes
W =
∫V
[1
2κ0(1ts + 2ts)
2+
+1
4µ0
(1tαβ + 2t
αβ)
(1tαβ + 2tαβ)
]dV .
(17.101)
Expanding and re-arranging, we obtain
W =
∫V
[1
2κ01t
2s +
1
4µ01tαβ
1tαβ +
+1
2κ02t
2s +
1
4µ02tαβ
2tαβ +
+1
κ01ts 2ts +
1
4µ0
(1tαβ
2tαβ + 2tαβ
1tαβ) ]
dV
(17.102)
which can be written as
W =
∫V
[E‖ + E⊥
]1
dV +
∫V
[E‖ + E⊥
]2
dV+
+
∫V
[E‖ + E⊥
]12
dV
(17.103)
which is equivalent to
W = W1 +W2 +W12 . (17.104)
Hence the overlap interaction strain energy is given by the thirdterm from (17.102):
W12 =
∫V
[1
κ01ts 2ts +
1
4µ0
(1tαβ
2tαβ + 2tαβ
1tαβ)]
dV . (17.105)

§17.4 Overlap interaction of multiple defects 269
Substituting from (17.93) (see (1.20) and (1.21)) into (17.105), we obtain
W12 =1
16κ0
∫V
1Tαα 2T
αα dV+
+1
4µ0
∫V
[(1T
αβ − 1
41T
ννgαβ
)(2Tαβ −
1
42T
ννgαβ
)+
+
(2T
αβ − 1
42T
ννgαβ
)(1Tαβ −
1
41T
ννgαβ
)]dV .
(17.106)
Expanding and simplifying the second integral, we obtain
W12 =1
16κ0
∫V
1Tαα 2T
αα dV+
+1
4µ0
∫V
[1T
αβ2Tαβ + 2T
αβ1Tαβ −
1
21T
αα 2T
αα
]dV
(17.107)
where 1Tαα = ρ1c
2 and 2Tαα = ρ2c
2.
Hence the overlap interaction strain energy can be written as
W12 = Wmass12 +W field
12 (17.108)
where Wmass12 is a pure mass longitudinal term given by
Wmass12 =
1
16κ0
∫V
1Tαα 2T
αα dV (17.109)
and W field12 is a pure massless transverse field term given by
W field12 =
1
4µ0
∫V
[1T
αβ2Tαβ + 2T
αβ1Tαβ−
− 1
21T
αα 2T
αα
]dV
(17.110)
Alternatively, (17.107) can be written as
W12 =1
4µ0
∫V
[1T
αβ2Tαβ + 2T
αβ1Tαβ −
− λ0
µ0 + 2λ01T
αα 2T
αα
]dV .
(17.111)
It is important to note that the overlap interaction strain energy isusually expressed as energy per unit length of the defect W12/`.

270 Chapter 17 Defect Interactions in Quantum Physics
§17.4.2 Parallel dislocation interactions
From Hirth [123, see pp. 117-118], the energy of interaction per unitlength between parallel dislocations (including screw and edge disloca-tion components) is given by
W12
`= − µ0
2π(b1 · ξ) (b2 · ξ) ln
R
RΛ−
− µ0
π
µ0 + λ0
2µ0 + λ0(b1 × ξ) · (b2 × ξ) ln
R
RΛ−
− µ0
π
µ0 + λ0
2µ0 + λ0
[(b1 × ξ) ·R] [(b2 × ξ) ·R]
R2
(17.112)
where ξ is parallel to the z axis, (bi · ξ) are the screw components,(bi × ξ) are the edge components, R is the separation between thedislocations, and RΛ is the distance from which the dislocations arebrought together, resulting in the decrease in energy of the “system”.
The components of the interaction force per unit length between theparallel dislocations are obtained by differentiation:
FR`
= −∂(W12/`)
∂R
Fθ`
= − 1
R
∂(W12/`)
∂θ.
(17.113)
Substituting from (17.112), (17.113) becomes
FR`
=µ0
2πR(b1 · ξ) (b2 · ξ) +
+µ0
πR
µ0 + λ0
2µ0 + λ0(b1 × ξ) · (b2 × ξ)
Fθ`
=µ0
πR3
µ0 + λ0
2µ0 + λ0
[(b1 ·R) [(b2 × R) · ξ] +
+ (b2 ·R) [(b1 × R) · ξ]].
(17.114)
§17.4.3 Curved dislocation interactions
In this section, we extend the investigation of curved dislocations ini-tiated in section §9.5, to the interaction energy and interaction forcebetween curved dislocations [123, see pp. 106-110]. The derivation con-siders the interaction between two dislocation loops, but has much more

§17.4 Overlap interaction of multiple defects 271
extensive applications, being extendable to the interaction energy be-tween two arbitrarily positioned segments of dislocation lines.
If a dislocation loop 1 is brought in the vicinity of another dislocationloop 2, the stresses originating from loop 2 do work −W12 on loop 1where W12 is the interaction energy between the two dislocation loops.The work done on loop 1 represents a decrease in the strain energy ofthe total system. In that case, if W12 is negative, the energy of thesystem decreases and an attractive force exists between the loops [123,see p. 106].
The interaction energy between the two dislocation loops is givenby [123, see p. 108]
W12 = − µ0
2π
∮C1
∮C2
(b1 × b2) · (dl1 × dl2)
R+
+µ0
4π
∮C1
∮C2
(b1 · dl1) (b2 · dl2)
R+
+µ0
2π
µ0 + λ0
2µ0 + λ0
∮C1
∮C2
(b1 × dl1) ·T · (b2 × dl2)
R
(17.115)
where T is given by
Tij =∂2R
∂xi∂xj. (17.116)
The force produced by an external stress acting on a dislocation loopis given by [123, see p. 109]
dF = (b · σ)× dl (17.117)
where σ is the stress tensor in the medium, b is the Burgers vector, anddl is the dislocation element. This equation can be used with (9.151) todetermine the interaction force between dislocation segments.
As each element dl of a dislocation loop is acted upon by the forcescaused by the stress of the other elements of the dislocation loop, thework done against these corresponds to the self-energy of the disloca-tion loop. The self-energy of a dislocation loop can be calculated from(17.115) to give [123, see p. 110]
Wself =µ0
8π
∮C1=C
∮C2=C
(b · dl1) (b · dl2)
R+
+µ0
4π
µ0 + λ0
2µ0 + λ0
∮C1=C
∮C2=C
(b× dl1) ·T · (b× dl2)
R
(17.118)

272 Chapter 17 Defect Interactions in Quantum Physics
where T is as defined in (17.116).More complicated expressions can be obtained for interactions be-
tween two non-parallel straight dislocations [123, see pp. 121-123] andbetween a straight segment of a dislocation and a differential elementof another dislocation [123, see pp. 124-131]. This latter derivation canbe used for more arbitrary dislocation interactions.

Chapter 18
Quantum Physics in STCED
In this chapter, we synthesize the analysis of defects in the spacetimecontinuum considered in the previous ten chapters to model quantumphysics within the framework of STCED. As we will see in the forth-coming sections, this model provides a physical explanation of quantumphenomena, quantum electrodynamics, and other quantum dynamic in-teractions that currently remain unexplained in quantum physics.
§18.1 Quantum particles from defects and their interactions
As seen previously in section §14.4, dislocations are translational dis-placements that commute, satisfy the superposition principle and be-have as bosons. Disclinations, on the other hand, are rotational displace-ments that do not commute, do not obey the superposition principle andbehave as fermions.
§18.1.1 Dislocations (bosons)
Dislocations, due to their translational nature, are defects that are easierto analyze than disclinations.
Screw dislocation. The screw dislocation was analyzed in sections§9.2 and §15.1. It is the first defect that we identified with the photondue to its being massless and of spin-1. Consequently, its longitudinalstrain energy is zero
WS‖ = 0. (18.1)
Its transverse strain energy is given by (16.5)
WS⊥ =
µ0
4πb2 ` ln
Λ
bc. (18.2)
where ` = λ, the photon’s wavelength, bc is the size of the core of the dis-location, of order b0, the smallest spacetime dislocation Burgers vector,and Λ is a cut-off parameter corresponding to the radial extent of thedislocation, limited by the average distance to its nearest neighbours.
Edge dislocation. The edge dislocation was analyzed in §9.3 and§9.5. The longitudinal strain energy of the edge dislocation is given by

274 Chapter 18 Quantum Physics in STCED
(16.29)
WE‖ =
κ0
2πα2
0
(b2x + b2y
)` ln
Λ
bc(18.3)
The transverse strain energy is given by (16.54)
WE⊥ =
µ0
4π
(α2
0 + 2β20
) (b2x + b2y
)` ln
Λ
bc. (18.4)
The total longitudinal (massive) dislocation strain energy WDt‖ is
given by (18.3) while the total transverse (massless) dislocation strainenergy is given by the sum of the screw (along the z axis) and edge (inthe x− y plane) dislocation transverse strain energies
WDt⊥ =
µ0
4π
[b2z +
(α2
0 + 2β20
) (b2x + b2y
)]` ln
Λ
bc. (18.5)
which can be rewritten as a sum of physical terms
WDt⊥ =
µ0
4π
[b2z + α2
0 (b2x + b2y) + 2β20 (b2x + b2y)
]` ln
Λ
bc(18.6)
where the first term of the distortion strain energy corresponds to thescrew dislocation strain energy of (16.5), the edge dislocation distor-tion strain energy arising from the longitudinal strain energy density of(9.139) and the edge dislocation distortion strain energy arising fromthe rotation vector of (9.138).
The total strain energy of dislocations
WDt = WDt‖ +WDt
⊥ (18.7)
provides the total energy of massive bosons, with WDt‖ corresponding to
the longitudinal particle aspect of the bosons and WDt⊥ corresponding
to the wave aspect of the bosons. As seen in chapter 12, the latter isassociated with the wavefunction of the boson. The spin characteristicsof these was considered in §3.6, where they were seen to correspond tospin-0 and spin-2 solutions.
§18.1.2 Disclinations (fermions)
Disclinations are defects that are more difficult to analyze than disloca-tions, due to their rotational nature. This mirrors the case of fermions,which are more difficult to analyze than bosons.

§18.1 Quantum particles from defects and their interactions 275
Wedge disclination. The wedge disclination was analyzed in §10.6.The longitudinal strain energy of the wedge disclination is given by(16.62)
WW‖ =
κ0
4πΩ2z `[α2
0
(2Λ2 ln2 Λ− 2b2c ln2 bc
)+
+ α0γ0
(2Λ2 ln Λ− 2b2c ln bc
)+
+ 12 (α2
0 + γ20)(Λ2 − b2c
) ].
(18.8)
In most cases Λ bc, and (18.8) reduces to
WW‖ '
κ0
2πΩ2z `Λ2
[α2
0 ln2 Λ + α0γ0 ln Λ + 14 (α2
0 + γ20)]. (18.9)
which is rearranged as
WW‖ '
κ0
2πα2
0 Ω2z `Λ2
[ln2 Λ +
γ0
α0ln Λ +
1
4
(1 +
γ20
α20
)]. (18.10)
The transverse strain energy of the wedge disclination is given by(16.70)
WW⊥ =
µ0
4πΩ2z `
[α2
0
(Λ2 ln2 Λ− b2c ln2 bc
)−
−(α2
0 − 3α0β0
) (Λ2 ln Λ− b2c ln bc
)+
+1
2
(α2
0 − 3α0β0 +3
2β2
0
)(Λ2 − b2c
) ].
(18.11)
In most cases Λ bc, and (18.11) reduces to
WW⊥ '
µ0
4πΩ2z `
[α2
0 Λ2 ln2 Λ−(α2
0 − 3α0β0
)Λ2 ln Λ+
+1
2
(α2
0 − 3α0β0 +3
2β2
0
)Λ2
] (18.12)
which is rearranged as
WW⊥ '
µ0
4πα2
0 Ω2z `Λ2
[ln2 Λ−
(1− 3
β0
α0
)ln Λ +
1
2
(1− 3
β0
α0+
3
2
β20
α20
)].
(18.13)

276 Chapter 18 Quantum Physics in STCED
We first note that both the longitudinal strain energy WW‖ and the
transverse strain energy WW⊥ are both proportional to Λ2 in the limit
Λ bc. The parameter Λ is equivalent to the extent of the wedgedisclination, and we find that as it becomes more extended, its strainenergy is increasing parabolically. This behaviour is similar to that ofquarks (confinement) which are fermions. In addition, as Λ → bc, thestrain energy decreases and tends to 0, again in agreement with thebehaviour of quarks (asymptotic freedom).
We thus identify wedge disclinations with quarks. The total strainenergy of wedge disclinations
WW = WW‖ +WW
⊥ (18.14)
provides the total energy of the massive quarks, withWW‖ corresponding
to the longitudinal particle aspect of the quarks and WW⊥ corresponding
to the wave aspect of the quarks. We note that the current classificationof quarks include both ground and excited states – the current analysisneeds to be extended to such higher energy states.
We note also that the rest-mass energy density ρW c2 of the wedgedisclination is proportional to ln r which also increases with increasing r,while the rest-mass energy density ρEc2 of the edge dislocation and ρT c2
of the twist disclination are both proportional to 1/r2 which decreaseswith increasing r as expected of bosons and leptons.
Twist disclination. The twist disclination was analyzed in §10.7.Note that as mentioned in that section, we do not differentiate betweentwist and splay disclinations in this subsection as twist disclination ex-pressions include both pure twist disclinations and splay disclinations.However, in the next subsections, we will need to differentiate betweensplay and pure twist disclinations, and again we will use the terminology“pure twist disclination” to refer to the specific twist disclination thatdoes not include the splay disclination.
The longitudinal strain energy of the twist disclination is given by(16.80)
WT‖ =
κ0
6πα2
0
(Ω2x + Ω2
y
)`3 ln
Λ
bc. (18.15)

§18.1 Quantum particles from defects and their interactions 277
The transverse strain energy of the twist disclination is given by (16.87)
WT⊥ =
µ0
π
(Ω2x + Ω2
y
) `33
[1
3α2
0
(ln3 Λ− ln3 bc
)+
+1
2α0β0
(ln2 Λ− ln2 bc
)+
1
2
(α2
0 + 12 β
20
)ln
Λ
bc−
− 1
2β2
0
(1
Λ2− 1
b2c
)]+ 2 ΩxΩy `
[1
4β0
(α0 − β0
) (Λ2 − b2c
)−
− 1
2α0β0
(Λ2 ln Λ− b2c ln bc
)− `2
3
(β2
0 − 12 α
20
)ln
Λ
bc
].
(18.16)
In most cases Λ bc, and (18.16) reduces to
WT⊥ =
µ0
π
(Ω2x + Ω2
y
) `33
[1
3α2
0
(ln3 Λ− ln3 bc
)+
+1
2α0β0
(ln2 Λ− ln2 bc
)+
1
2
(α2
0 + 12 β
20
)ln
Λ
bc−
+1
2β2
0
1
b2c
]+ 2 ΩxΩy `
[1
4β0
(α0 − β0
)Λ2−
− 1
2α0β0 Λ2 ln Λ− `2
3
(β2
0 − 12 α
20
)ln
Λ
bc
](18.17)
which can be rearranged in terms of α0/β0 to give
WT⊥ =
µ0α20
π
(Ω2x + Ω2
y
) `33
[1
3
(ln3 Λ− ln3 bc
)+
+1
2
β0
α0
(ln2 Λ− ln2 bc
)+
1
2
(1 +
1
2
β20
α20
)ln
Λ
bc+
+1
2
β20
α20
1
b2c
]+ 2 ΩxΩy `
[1
4
β0
α0
(1− β0
α0
)Λ2−
− 1
2
β0
α0Λ2 ln Λ− `2
3
(β2
0
α20
− 1
2
)ln
Λ
bc
].
(18.18)
As noted, these expressions include both splay disclinations whichwe denote as WTs and pure twist disclinations which we denote asWTt. We can thus separate the longitudinal strain energy of the twistdisclination as
WT‖ = WTs
‖ +WTt‖ (18.19)

278 Chapter 18 Quantum Physics in STCED
and the transverse strain energy of the twist disclination as
WT⊥ = WTs
⊥ +WTt⊥ . (18.20)
We consider both splay disclinations and pure twist disclinations in thenext subsections.
Splay disclination. The splay disclination is discussed in §10.1and illustrated in Fig. 10.1. As shown in Fig. 10.1, splay disclinationsare characterized by the Frank vector Ωr and will thus be functions ofΩ2x+Ω2
y. The longitudinal strain energy of the splay disclination is thusgiven by the Ω2
x + Ω2y terms of (18.15)
WTs‖ =
κ0
6πα2
0
(Ω2x + Ω2
y
)`3 ln
Λ
bc. (18.21)
The transverse strain energy of the splay disclination is thus givenby the Ω2
x + Ω2y terms of (18.16)
WTs⊥ =
µ0
π
(Ω2x + Ω2
y
) `33
[1
3α2
0
(ln3 Λ− ln3 bc
)+
+1
2α0β0
(ln2 Λ− ln2 bc
)+
1
2
(α2
0 + 12 β
20
)ln
Λ
bc−
− 1
2β2
0
(1
Λ2− 1
b2c
)].
(18.22)
In most cases Λ bc, and (18.22) reduces to
WTs⊥ =
µ0
π
(Ω2x + Ω2
y
) `33
[1
3α2
0
(ln3 Λ− ln3 bc
)+
+1
2α0β0
(ln2 Λ− ln2 bc
)+
1
2
(α2
0 + 12 β
20
)ln
Λ
bc−
+1
2β2
0
1
b2c
] (18.23)
which can be rearranged in terms of α0/β0 to give
WTs⊥ =
µ0α20
π
(Ω2x + Ω2
y
) `33
[1
3
(ln3 Λ− ln3 bc
)+
+1
2
β0
α0
(ln2 Λ− ln2 bc
)+
1
2
(1 +
1
2
β20
α20
)ln
Λ
bc+
+1
2
β20
α20
1
b2c
].
(18.24)

§18.1 Quantum particles from defects and their interactions 279
The total strain energy of the splay disclination is given by
WTs = WTs‖ +WTs
⊥ . (18.25)
It is interesting to note that WTs‖ of (18.21) is proportional to ln Λ/bc,
as are the screw dislocation (photon) and edge dislocation (bosons).However, WTs
⊥ of (18.22) does not have this simpler dependence, buta more complicated functional dependence. This, and the results ofthe next subsection, leads us to identify the splay disclinations with thecharged leptons (electron, muon, tau) fermions, where the heavier muonand tau are expected to be excited states of the electron.
Pure twist disclination. The pure twist disclination is discussed in§10.1 and illustrated in Fig. 10.1. As shown in Fig. 10.1, while wedgedisclinations are characterized by the Frank vector Ωz and splay discli-nations are characterized by the Frank vector Ωr and hence are functionsof Ω2
x + Ω2y, pure twist disclinations are characterized by the Frank vec-
tor Ωn. The longitudinal strain energy of the pure twist disclination isthus given by the non Ω2
x + Ω2y terms of (18.15) which in this case is
zeroWTt‖ = 0 . (18.26)
The transverse strain energy of the pure twist disclination is thusalso given by the non Ω2
x + Ω2y terms of (18.16):
WTt⊥ =
µ0
π2 ΩxΩy `
[1
4β0
(α0 − β0
) (Λ2 − b2c
)−
− 1
2α0β0
(Λ2 ln Λ− b2c ln bc
)− `2
3
(β2
0 − 12 α
20
)ln
Λ
bc
].
(18.27)
In most cases Λ bc, and (18.27) reduces to
WTt⊥ =
µ0
π2 ΩxΩy `
[1
4β0
(α0 − β0
)Λ2−
− 1
2α0β0 Λ2 ln Λ− `2
3
(β2
0 − 12 α
20
)ln
Λ
bc
] (18.28)
which can be rearranged in terms of α0/β0 to give
WTt⊥ =
µ0
πα2
0 2 ΩxΩy `
[1
4
β0
α0
(1− β0
α0
)Λ2−
− 1
2
β0
α0Λ2 ln Λ− `2
3
(β2
0
α20
− 1
2
)ln
Λ
bc
].
(18.29)

280 Chapter 18 Quantum Physics in STCED
The total strain energy of the pure twist disclination is given by
WTt = WTt‖ +WTt
⊥ = WTt⊥ (18.30)
given that the pure twist disclination does not have a longitudinal (mas-sive) component. Since the pure twist disclination is a massless fermion,this leads us to identify the pure twist disclination with the neutrino.
It should be noted that even though the mass of the neutrino is cur-rently estimated to be on the order of 10’s of eV, this estimate is basedon assuming neutrino oscillation between the currently known three lep-ton generations, to explain the anomalous solar neutrino problem. Thisis a weak explanation for that problem, which more than likely indicatesthat we do not yet fully understand solar astrophysics. One can onlyhope that a fourth generation of leptons will not be discovered! Untilthe anomaly is fully understood, we can consider the pure twist discli-nation physical model where the mass of the neutrino is zero to be atleast a first approximation of the neutrino STC defect model.
§18.1.3 Quantum particles and their associated spacetimedefects
The following table provides a summary of the identification of quantumparticles and their associated spacetime defects.
STC defect Type of particle Particles
Screw dislocation Massless boson Photon
Edge dislocation Massive boson Spin-0 particle
Spin-1 Proca eqn
Spin-2 graviton
Wedge disclination Massive fermion Quarks
Splay disclination Massive fermion Leptons
True twist disclination Massless fermion Neutrino
Table 18.1: Identification of quantum particles and their associated de-fects.
§18.2 Feynman diagrams and defect interactions
As mentioned in section §14.5 and developed further in this chapter, thebasic Feynman diagrams can be seen to represent screw dislocations as

§18.3 Interpretation of defect strain energy interactions 281
photons, edge dislocations as bosons, twist and wedge disclinations asfermions, and their interactions. More specifically, the external legs ofFeynman diagrams that are on mass-shell representing real particles cor-respond to dislocations and disclinations, while the virtual off mass-shellparticles are replaced by the interaction of the strain energy densities.
The exchange of virtual particles in QED interactions can be takenas the perturbation expansion representation of the forces resulting fromthe overlap of the strain energy density of the dislocations and discli-nations. The Feynman diagram propagators are replaced by the defectstrain energy density interaction expressions.
The properties of Burgers vectors and dislocations [123, see pp. 25-26] have rules similar to those of Feynman diagrams, but not equivalentas virtual particles are replaced by defect strain energy density inter-actions. A Burgers vector is invariant along a dislocation line. TwoBurgers circuits are equivalent if one can be deformed into the otherwithout crossing dislocation lines. The resultant Burgers vector withinequivalent Burgers circuits is the same.
Dislocation nodes are points where multiple dislocations meet. If allthe dislocation vectors ξi are taken to be positive away from a node,then
N∑i=1
ξi = 0 (18.31)
for the N dislocations meeting at the node. Burgers vectors are con-served at dislocation nodes. Frank vectors also satisfy a Kirchhoff rela-tion at disclination nodes, as do Burgers vectors at dislocation nodes.
§18.3 Interpretation of defect strain energy interactions
As seen in section §14.5, the role played by virtual particles in quantumelectrodynamics (QED) is replaced by the interaction of the strain en-ergy density of the dislocations and disclinations. QED is a perturbativetheory, and the virtual particles are introduced as an interpretation ofthe perturbative expansion represented by Feynman diagrams.
Although the existence of virtual particles in QED is generally ac-cepted, there are physicists who still question this interpretation of QEDperturbation expansions. As noted previously in section §9.5, Wein-gard [274] “argues that if certain elements of the orthodox interpretationof states in QM are applicable to QED, then it must be concluded thatvirtual particles cannot exist. This follows from the fact that the tran-sition amplitudes correspond to superpositions in which virtual particletype and number are not sharp. Weingard argues further that analysis

282 Chapter 18 Quantum Physics in STCED
of the role of measurement in resolving the superposition strengthensthis conclusion. He then demonstrates in detail how in the path integralformulation of field theory no creation and annihilation operators needappear, yet virtual particles are still present. This analysis shows thatthe question of the existence of virtual particles is really the questionof how to interpret the propagators which appear in the perturbationexpansion of vacuum expectation values (scattering amplitudes).” [27]
The basic Feynman diagrams can be seen to represent screw dislo-cations as photons, edge dislocations as bosons, twist and wedge discli-nations as fermions, and their interactions. Virtual particles would re-quire the presence of virtual dislocations and virtual disclinations inthe spacetime continuum, which clearly does not make sense. Instead,the exchange of virtual particles in interactions can be seen to be aperturbation expansion representation of the forces resulting from theinteraction of the defects’ strain energy density, with suitably modi-fied diagrams. The perturbative expansions are thus replaced by finiteanalytical expressions.
The analysis presented in the following sections is not perturba-tive as in QED, but rather calculated from analytical expressions. Theanalytical equations can become very complicated, and in some cases,perturbative techniques are used to simplify the calculations, but theavailability of analytical expressions permit a better understanding ofthe fundamental quantum processes involved.
In quantum electrodynamics, these correspond to particle-particleand particle-photon interactions, which are taken to be mediated byvirtual particles. This is in keeping with the QED picture, but as shownabove, particle-particle and particle-photon interactions physically re-sult from the overlap of their strain energy density which results in aninteraction force. Again, this improved understanding of the physicalnature of dislocation interactions demonstrates that the interactions donot need to be represented by virtual particle exchange as discussed insection §14.5.
This theory provides a straightforward physical explanation of part-icle-particle and particle-photon interactions that is not based on per-turbation theory, but rather on a direct evaluation of the interactions.
§18.3.1 Photons and screw dislocation interactions
Screw dislocations interact via the force resulting from the overlap ofthe strain energy density of the dislocations and disclinations in thespacetime continuum [123, see p. 112].

§18.3 Interpretation of defect strain energy interactions 283
As seen in section §15.1, screw dislocations in the spacetime con-tinuum are identified with the massless, transverse deformations corre-sponding to photons. As pointed out in [167], it has been known sincethe 1960s that photons can interact with each other in atomic mediamuch like massive particles do. A review of collective effects in photon-photon interactions is given in [171].
In QED, photon-photon interactions are known as photon-photonscattering, which is thought to be mediated by virtual particles. Thisreflects the perturbative calculation used to evaluate the scattering, butas shown in this work, photon-photon interactions physically result fromthe overlap of their strain energy density. This improved understand-ing of the physical nature of photon-photon interactions demonstratesthat the interaction does not need to be represented by virtual particleexchanges, in that the nature of the physical processes involved is nowunderstood, and can be calculated directly.
From (17.112), the energy of interaction per unit length betweenparallel screw dislocations (photons) is given by
WS−S12
`= − µ0
2π(b1 · ξ) (b2 · ξ) ln
R
RΛ(18.32)
where ξ is parallel to the z axis, (bi · ξ) are the screw components, Ris the separation between the dislocations, and RΛ is the distance fromwhich the dislocations are brought together, resulting in the reductionin the energy of the 2-photon “system”.
From (17.114), the components of the interaction force per unitlength between the parallel screw dislocations are given by:
FS−SR
`=
µ0
2πR(b1 · ξ) (b2 · ξ)
FS−Sθ
`= 0.
(18.33)
The interaction force is radial in nature, independent of the angle θ, asexpected.
§18.3.2 Photon-neutrino interactions
It is surprising to find that the massless, electrically neutral, weakly in-teracting neutrino would interact with the massless, electrically neutral,electromagnetic interacting photon. Photon-neutrino interactions havebeen considered, in particular by [148,177,208] and others. STCED pro-vides for their interaction via the force resulting from the interaction

284 Chapter 18 Quantum Physics in STCED
of their strain energy density, i.e. the interaction of screw dislocationsand pure twist disclinations, which correspond to photon-neutrino in-teractions.
§18.4 Physical explanations of QED phenomena
As we have seen in previous sections, spacetime continuum dislocationsand disclinations have fundamental properties that reflect those of phe-nomena at the quantum level. In particular, the improved understand-ing of the physical nature of interactions mediated by the strain energydensity of the defects. The role played by virtual particles in QuantumElectrodynamics is replaced by the work done by the forces resultingfrom the defect stresses, and the resulting interaction of the strain en-ergy density of the dislocations and disclinations. In this section, weexamine the physical explanation of QED phenomena provided by thistheory, including self-energy and mass renormalization.
§18.4.1 Dislocation self-energy and QED self energies
The dislocation self-energy is related to the dislocation self-force. Thedislocation self-force arises from the force on an element in a disloca-tion caused by other segments of the same dislocation line. This processprovides an explanation for the QED self-energies without the need toresort to the emission/absorption of virtual particles. It can be un-derstood, and is particular to, dislocation dynamics as dislocations aredefects that extend in the spacetime continuum [123, see p. 131]. Self-energy of a straight-dislocation segment of length L is given by [123, seep. 161]:
Wself =µ0
4π
((b · ξ)2 +
µ0 + λ0
2µ0 + λ0|(b × ξ)|2
)L
(lnL
b− 1
)(18.34)
where there is no interaction between two elements of the segment whenthey are within ±b, or equivalently
Wself =µ0
4π
((b · ξ)2 +
µ0 + λ0
2µ0 + λ0|(b × ξ)|2
)L ln
L
eb(18.35)
where e = 2.71828... . These equations provide analytic expressions forthe non-perturbative calculation of quantum self energies and interac-tion energies, and eliminate the need for the virtual particle interpreta-tion.

§18.4 Physical explanations of QED phenomena 285
In particular, the pure screw (photon) self-energy
WSself =
µ0
4π(b · ξ)2 L
(lnL
b− 1
)(18.36)
and the pure edge (particle) self-energy
WEself =
µ0
4π
µ0 + λ0
2µ0 + λ0|(b × ξ)|2 L
(lnL
b− 1
)(18.37)
are obtained from (18.35), while (18.35) is also the appropriate equationto use for the dual wave-particle “system”.
Dislocation self energies are thus found to be similar in structureto Quantum Electrodynamics self energies. They are also divergent ifintegrated over all of spacetime, with the divergence being logarith-mic in nature. However, contrary to QED, dislocation self energies arebounded by the density of dislocations present in the spacetime contin-uum, which results in an upperbound to the integral of half the averagedistance between dislocations. As mentioned by Hirth [123], this haslittle impact on the accuracy of the results due to the logarithmic de-pendence.
§18.4.2 Dislocation strain energy and QED massrenormalization
This approach also resolves and eliminates the mass renormalizationproblem. This problem arises in QED due to the incomplete descriptionof particle energies at the quantum level. This book shows that thestrain energy density of an edge dislocation, which corresponds to aparticle, consists of a longitudinal dilatation mass density term and atransverse distortion energy density term, as shown in (9.49), (9.50),and (9.51).
QED, in its formulation, only uses the transverse distortion strainenergy density in its calculations. This is referred to as the bare massm0. However, there is no dilatation mass density term used in QED,and hence no possibility of properly deriving the mass. The bare massm0 is thus renormalized by replacing it with the actual experimentalmass m. Using the longitudinal dilatation mass density term as in thisbook will provide the correct mass m and eliminate the need for massrenormalization.

286 Chapter 18 Quantum Physics in STCED
§18.5 Nonlocality of quantum phenomena
Defects in the spacetime continuum give rise to nonlocal effects andnonlocal continuum field theories [91]. Discrete line defects extend in thespacetime continuum, and hence interact nonlocally, much as nonlocalinteractions between distant atoms determine the properties of materialsin solid-state physics.
§18.6 Entangled states in quantum physics
As noted in the previous section §18.5, the physical extension of defectsin the spacetime continuum gives rise to nonlocal effects and to whatare referred to as “entangled states” in quantum physics. Entangledstates correspond to the overlap of defects in the spacetime continuum,overlaps that can extend between distant defects, and are characterizedby the interaction of their strain energy densities.

Chapter 19
Spacetime Continuum Characteristics
§19.1 The spacetime Burgers dislocation constant b0 andPlanck’s constant
In this section, we explore the relation between the spacetime Burgersdislocation constant b0 and Planck’s constant, and derive the value ofthe spacetime continuum constants.
Based on our identification of screw dislocations in the spacetimecontinuum with photons, we can determine the relation between theBurgers constant b0 and Planck’s constant h.
Even though the photon is massless, its energy is given by the strainenergy density of the screw dislocation, equivalent to the transversedistortion energy density. As shown in [180, Eq. (147)],
p2c2 = 32κ0 E⊥, (19.1)
where p is the momentum density. For a screw dislocation, substitutingfor E⊥ from (9.22) in (19.1), we obtain
p2c2 = 32κ0µ0 b
2
8π2
1
r2. (19.2)
The kinetic energy density pc has to be equivalent to the wave energy
density hν for the screw dislocation (photon):
pc = hν. (19.3)
The photon’s energy is given by
hν =
∫V
hν dV = hν V (19.4)
where V is the volume of the screw dislocation. We consider the smallestBurgers dislocation vector possible and replace b with the elementaryBurgers dislocation vector b0 and V with the smallest volume V0 toderive Planck’s constant. Combining (19.4), (19.3) and (19.2), (19.4)becomes
h =
√16κ0 µ0 b0
2
(2πr)2
V0
ν. (19.5)

288 Chapter 19 Spacetime Continuum Characteristics
Using (15.7), the frequency ν = c/λ becomes ν = c/b0 for the small-est Burgers dislocation vector considered. Substituting into (19.5), theequation becomes
h =4√κ0 µ0 b02πr
V0b0c. (19.6)
The volume of one wavelength of the screw dislocation can be approxi-mated by a cylinder and, using (15.7), written as
V = πr2λ = πr2b, (19.7)
which in the limit as b→ b0, becomes
V0 = πr2b0. (19.8)
Substituting for V0 into (19.6), the equation becomes
h =4√κ0 µ0 b02πr
πr2b20c
. (19.9)
Simplifying,
h =2√κ0 µ0
crb30, (19.10)
and in the limit as r approaches b0, becomes
h = 2
√κ0 µ0 b
40
c(19.11)
where the units of h are [J · s] as expected. This is the basic definitionof Planck’s constant h in terms of the Lame spacetime constants andthe Burgers spacetime dislocation constant b0.
This relation can be further simplified using µ0 = 32κ0 from [180,Eq. (150)]. Then
h = 8√
2κ0 b0
4
c=
1
2√
2
µ0 b04
c. (19.12)
Numerically,
µ0 b04 = 2
√2hc = 5.8× 10−25 J m. (19.13)
The value of the spacetime shear modulus µ0 is not a known physicalconstant, neither is the value of the spacetime bulk modulus κ0. How-ever, Macken [168] has derived a value of κ0 = 4.6×10113 J/m3 which as

§19.2 Spacetime continuum constants 289
we will see in section §19.2.1 is expected to be a valid estimate. Usingµ0 = 32κ0 from Millette [180, Eq. (150)], this yields a value of
µ0 = 1.5× 10115 J/m3. (19.14)
Note that the units can be expressed equivalently as [N ·m−2] or as[J ·m−3]. Substituting for µ0 in (19.13), we obtain the value of theelementary Burgers vector
b0 = 1.4× 10−35 m. (19.15)
This value compares very favorably with the Planck length 1.6 × 10−35
m. Given the approximations used in its derivation, this suggests thatthe elementary Burgers vector b0 and the Planck length are equivalent.
§19.2 Spacetime continuum constants
With these constants, we are now in a position to calculate the re-maining unknown spacetime constants, the density of the spacetimecontinuum ρ0 and the speed of longitudinal deformations cl. Using therelation [180]
c =
õ0
ρ0, (19.16)
the density of the spacetime continuum is
ρ0 = 1.7× 1098 kg/m3. (19.17)
This value is in the same ballpark as the vacuum energy density cal-culated by Carroll [39, see p. 173] (∼ 10112 ergs/cm3) from quantummechanical considerations. From
cl =
√2µ0 + λ0
ρ0, (19.18)
(2.3) and (5.53), the speed of longitudinal deformations is given by
cl =7
4√
2c = 1.24 c. (19.19)
cl = 3.7× 108 m/s. (19.20)
Note that the speed of light is still the limiting speed in spacetime asdiscussed in [123,187].

290 Chapter 19 Spacetime Continuum Characteristics
§19.2.1 Analytic form of constants b0 and κ0
Blair [20, p. 3–4] writes Einstein’s field equation as
T =c4
8πGG,
where T is the stress energy tensor, G is the Einstein curvature ten-sor and G is the universal gravitational constant. He notes the verylarge value of the proportionality constant. This leads him to point outthat spacetime is an elastic medium that can support waves, but itsextremely high stiffness means that extremely small amplitude waveshave a very high energy density. He notes that the coupling constantc4/8πG can be considered as a modulus of elasticity for spacetime, andidentifies the quantity c3/G with the characteristic impedance of space-time [20, p. 45].
From this, Macken [168] derives an “interactive bulk modulus ofspacetime”, which we identify with the spacetime continuum bulk mod-ulus, given by
κ0 =c7
~G2. (19.21)
The result obtained for the numerical value of b0 and its close corre-spondance to the Planck length suggests that the value of κ0 proposedin [168] is correct. From Millette [180, Eq. (150)] we then have
µ0 = 32c7
~G2. (19.22)
From (19.13), we can write
b04 = 2
√2hc
µ0. (19.23)
Substituting from (19.22), this relation becomes
b04 =
√2π
8
~2G2
c6(19.24)
and finally
b0 =
(π
4√
2
) 14
√~Gc3
= 0.86 `P (19.25)
where `P is Planck’s length, defined as [147]
`P =
√~Gc3. (19.26)

§19.2 Spacetime continuum constants 291
Hence, as mentioned in section §19.1, this suggests that the elementaryBurgers dislocation vector b0 and the Planck length `P are equivalentwithin the approximations of the derivation.
§19.2.2 Recommended constants
Starting from the statement that the Burgers spacetime dislocation con-stant b0 is equivalent to the Planck length `P , we derive the constant ofproportionality of (19.11). We thus set
h = k
√κ0 µ0 b
40
c(19.27)
where k is the improved constant of proportionality for the relation.Substituting for κ0 from (19.21), for µ0 from (19.22), and setting b0 = `Pfrom (19.26), the equation becomes
h = k√
32c7
~G2
1
c
~2G2
c6(19.28)
from which we obtaink =
π
2√
2. (19.29)
Hence, with the Burgers spacetime dislocation constant b0 equivalentto the Planck length `P , the basic definition of Planck’s constant hin terms of the Lame spacetime constants and the Burgers spacetimedislocation constant b0 is given by
h =π
2√
2
√κ0 µ0 b
40
c. (19.30)
In terms of κ0, we have
h = 2πκ0 b
40
c(19.31)
or
~ =κ0 b
40
c(19.32)
and in terms of µ0, we have
h =π
16
µ0 b40
c. (19.33)
As stated, the Burgers spacetime dislocation constant b0 is given by
b0 = `P =
√~Gc3
(19.34)

292 Chapter 19 Spacetime Continuum Characteristics
and the spacetime continuum Lame constants are as per (19.21) and(19.22):
κ0 =c7
~G2
µ0 = 32c7
~G2.
(19.35)
From (19.16) and the value of µ0 above, the density of the spacetimecontinuum is given by
ρ0 = 32c5
~G2. (19.36)
It is recommended that the relations in this section be retained as theofficial definition of these constants.
§19.3 Action in the spacetime continuum
We consider (19.32) in greater details, viz.
~ =κ0 b
40
c. (19.37)
Interestingly enough, this equation can be considered to be a definitionof Planck’s reduced constant ~.
On the R.H.S. of the equation, we have the spacetime continuumbulk modulus constant κ0 in units of energy density [J · m−3], that isenergy per 3-D volume. We multiply κ0 by a 3-D volume to convert itto energy. However, κ0 is a spacetime continuum constant. We need aconversion in terms of the 4-D spacetime volume.
The R.H.S. of (19.37) also includes the term b40 which can be taken tobe the 4-D volume of a four-dimensional elementary hypercube of sideb0 = 1.616×10−35 m. This 4-D hypervolume has units of [m4] while thefour-dimensional spacetime continuum hypervolume consists of threespace dimensions and one time dimension with units [m3 · s]. Thisrequires that one of the space elementary dimensions b0 be divided by cto convert it to a time elementary dimension t0 = b0/c = 5.39× 10−44 sas seen in (19.37). Equation (19.37) can thus be written as
~ = κ0 b30
b0c
= κ0 b30 t0 = κ0 V
STC0 (19.38)
where V STC0 is the four-dimensional elementary spacetime continuumhypervolume and ~ has units of [J · s] which are units of action S.

§19.3 Action in the spacetime continuum 293
Hence multiplying κ0 by a 3-D space volume converts it to energy,while multiplying it by a 4-D spacetime volume converts it to action.Energy applies to three-dimensional space, while action applies to four-dimensional spacetime. From (19.38), we see that Planck’s reducedconstant corresponds to an elementary quantum of action S0:
~ = κ0 VSTC0 = S0 (19.39)
which has units of [J · s]. Action units are the same as those of angularmomentum, but this equivalence is accidental. The basic nature of ~ isan action, not an angular momentum. Calling ~ a “spin” quantity is anunfortunate misnomer from the early days of quantum mechanics. Itneeds to be called more appropriately an action quantity, i.e. a quantumof action.
We thus find that action is the fundamental four-dimensional space-time scalar quantity corresponding to energy for three-dimensional spa-ce. This helps explain why equations of motion are determined by min-imizing action, not energy, using the principle of least (or stationary)action given by
δS = 0 (19.40)
where the action S is expressed in terms of the Lagrangian L of thesystem as
S =
∫ t2
t1
L (q(t), q(t), t) dt (19.41)
where q = (q1, q2, ..., qN ) are the N generalized coordinates defining theconfiguration of the system and q denotes the time derivative of q.
In Lagrangian field theory, the action is written in terms of theLagrangian density L specified in terms of one or more fields φ(x) andtheir derivatives ∂µφ as [211, see p. 15ff]
S =
∫ x2
x1
L (φ(x), ∂µφ) d4x . (19.42)
The path integral formulation of quantum mechanics and quantumfield theory is a generalization of the action principle of classical me-chanics [207]. Interestingly enough, Feynman who developed this for-mulation [99]
... belie[ved] that the path integral captures the fundamentalphysics, and that hamiltonians and Hilbert space are merelymathematical methods for evaluating path integrals. [249, seep. 143]

294 Chapter 19 Spacetime Continuum Characteristics
In STCED, the path integral between two points x1 and x2 can beunderstood to be equivalent to the different possible wave paths betweenthe two points.
The propagation amplitude G(x2;x1) between the two points is de-termined from the path integral using the appropriate action for thesystem under consideration. One can see that since the contribution ofa path is proportional to eiS/~ [249, see p. 146], then, from (19.39), it isequivalent to eiS/S0 . In other words, the contribution of a path dependson the number of elementary quanta of action S0 in the path.
§19.4 Volume dilatation and rest-mass energy density
In this section we explore in greater details the relation between thevolume dilatation and rest-mass energy density. We recall the relation(2.24) between these quantities, viz.
ρc2 = 4κ0 ε (19.43)
which we rewrite as
ρ =4κ0
c2ε . (19.44)
Substituting for κ0 from (19.35),
ρ =4c5
~G2ε (19.45)
and numerically,ρ = 2.06× 1097 ε kg/m3 . (19.46)
Since the dilatation 0 ≤ ε ≤ 1, the range of values of the rest-massdensity is 0 ≤ ρ ≤ ρmax, where ρmax = 2.06× 1097 kg/m3.
Recalling that the density of the spacetime continuum is given by(19.36), viz.
ρ0 = 32c5
~G2(19.47)
or numerically
ρ0 = 8 ρmax = 1.65× 1098 kg/m3 , (19.48)
we see that the rest-mass density is always less than the spacetimecontinuum density which itself is a limiting density that applies only tomassless distortion displacements. Dilatations result in a dilatation ofthe spacetime continuum, with a resulting reduction in its local densityin the dilatation.

§19.4 Volume dilatation and rest-mass energy density 295
We define ρε as the effective spacetime continuum density inside thedilatation. In the case of a massless transverse distortion displacement,then ε = 0 and the effective STC density ρε in this case is the same asthe density of the spacetime continuum ρ0, i.e. ρε = ρ0. As the volumedilatation ε increases, the effective STC density becomes increasinglysmaller than the density of the spacetime continuum ρ0. The maximumreduction in the effective STC density occurs for the maximum dilata-tion ε = 1 for which the effective STC density ρε is equal to the densityof the spacetime continuum ρ0 = 8 ρmax minus the maximum rest-massdensity ρmax, i.e. ρε = ρ0 − ρmax. Hence the smallest effective STCdensity ρε is equal to 7 ρmax and the range of effective STC density ρεis given by
ρ0 − ρmax ≡ 7 ρmax ≤ ρε ≤ 8 ρmax ≡ ρ0 (19.49)
for the dilatation in the range 1 ≥ ε ≥ 0 respectively, or numerically,
1.44× 1098 kg/m3 ≤ ρε ≤ 1.65× 1098 kg/m3 . (19.50)
This is illustrated graphically in the following table.
Object Dilatation Rest-mass Effective STC
ε ρ (kg/m3) ρε (kg/m3)
Massless 0 0 1.65× 1098
distortion (ρ0)
· · ·Classical 4.7× 10−85 9.72× 1012 1.65× 1098
electron (∆ in 85th digit)
· · ·Theoretical 1 2.06× 1097 1.44× 1098
maximum (ρmax) (ρ0 − ρmax)
Table 19.1: Relation between volume dilatation, rest-mass density andeffective STC density.
As seen previously, Blair [20, p. 3–4] pointed out that spacetime is anelastic medium that can support waves, but its extremely high stiffnessmeans that extremely small amplitude waves have a very high energydensity. This results in extremely small values of ε and correspondinglyvery high values of rest-mass density from (19.46). The effective STC

296 Chapter 19 Spacetime Continuum Characteristics
density ρε is itself in the range of the density of the spacetime continuumρ0. It is important to note that this is applicable to elementary particles.For macroscopic bodies, one has to consider that they are composed ofelementary particles, and that the applicable mechanics are those thatgovern the aggregate bodies.
For example, using the classical radius of the electron, 2.82×10−15 m,and assuming a sphere, one gets a rest-mass density of 9.72×1012 kg/m3
and an ε = 4.7×10−85 for an electron. The effective STC density ρε in-side the electron is essentially the same as the density of the spacetimecontinuum ρ0, with a reduction only in the 85th digit of ρ0. A morepoint-like electron will have a smaller radius, a larger rest-mass den-sity and a larger ε. Still, the values of ε are extremely small, reflectingthe extremely high stiffness of the spacetime continuum. Macroscopicbodies are composed of elementary particles and are governed by theapplicable existing physical laws and ultimately by the spacetime con-tinuum methods of the General Theory of Relativity.
§19.5 Dark matter and dark energy
As mentioned previously in section §2.5.1, we now return to the questionof dark matter and dark energy, which is a major concern to moderncosmologists.
One of the major drivers of the concept of dark matter, the hy-pothetical unseen matter in the universe, has been the missing massof the galaxies inferred from the difference between the visual massof galaxies estimated from luminosity measurements and that mea-sured from the rotational speed of stars in the galaxies. Numeroustheories have been proposed to explain the galactic rotational curveproblem [19, 122, 170, 261], ranging from exotic non-baryonic matter toMOND, a modification of Newton’s theory. The dark matter to visiblematter ratio in the universe is estimated to be about 5.5 [122, 214], sothe discrepancy is substantial.
Recently, Heymann [122] has proposed an elegant resolution to themissing dark matter problem based on basic physical theory. The New-tonian inverse square law of gravitation is known to apply betweenmasses based on the distance between their barycenters, and similarlyapplies to bodies in the case of spherical geometry (known as the shelltheorem). Heymann notes that the shape of spiral galaxies is betterapproximated by a disk and in that case a correction factor ηdisk mustbe applied to Newton’s law which he shows numerically to be about

§19.5 Dark matter and dark energy 297
7.44± 0.83 at a 99% confidence interval
F = ηdiskGMm
R2(19.51)
where the symbols have their usual significance and
ηdisk =1
π
∫ 1
u=0
∫ 2π
α=0
u− u2 cosα
(u2 + 1− 2u cosα)32
du dα . (19.52)
This model could be tweaked to account for the arms of spiral galaxies(instead of a disk) and for the density profile across a cross-section of aspiral galaxy.
A recent 2012 study of the European Southern Observatory on thepresence of dark matter in our solar neighbourhood concluded:
The most accurate study so far of the motions of stars in theMilky Way has found no evidence for dark matter in a largevolume around the Sun... The amount of mass that we derivematches very well with what we see – stars, dust and gas – inthe region around the Sun. But this leaves no room for the extramaterial – dark matter – that we were expecting. Our calcu-lations show that it should have shown up very clearly in ourmeasurements. But it was just not there! ... Theories predictthat the average amount of dark matter in the Sun’s part of thegalaxy should be in the range 0.4–1.0 kilograms of dark matterin a volume the size of the Earth. The new measurements find0.00 ± 0.07 kilograms of dark matter in a volume the size of theEarth. [97, 195]
Fundamental questions are still being raised about dark matter anddark energy [201]. The question of dark matter is being discussed inthis book in relation to STCED as the question has been raised whetherSTCED can provide an answer to the mystery of dark matter.
§19.5.1 Cosmological constant energy density
In section §2.5.1, we saw how the introduction of the cosmological con-stant term +Λgµν in Einstein’s field equations is equivalent to intro-ducing additional rest-mass energy density in the spacetime continuum.In section §19.2, we derived the density of the spacetime continuumρ0 = 1.7× 1098 kg/m3 and found this value to be in the same ballparkas the vacuum energy density calculated by Carroll [39, see pp. 173](∼ 10112 ergs/cm3) from quantum mechanical considerations.

298 Chapter 19 Spacetime Continuum Characteristics
Carroll [39, see pp. 174,358] also calculates the vacuum energy den-sity from the cosmological constant (≈ 10−8 ergs/cm3) required by cur-rent cosmological observations. Comparing the two values, he pointsout, leads to “the origin of the famous discrepancy of 120 orders ofmagnitude between the theoretical and observational values of the cos-mological constant.” Hence any postulated cosmological constant vac-uum energy density does not provide an explanation for the requiredsource of dark matter.
§19.5.2 Spacetime continuum energy density
From the theory of STCED derived in this book, it is also evident thatthe spacetime continuum energy density (19.17) is not the source ofdark matter. Notwithstanding the 120 orders of magnitude discrepancy,any source of dark matter would be embedded as deformations in thespacetime continuum itself, and manifest itself solely as rest-mass energydensity associated with dilatations in the spacetime continuum as givenby (2.24), not the STC itself. This rest-mass energy density does notprovide the necessary source of dark matter.
Hence it would seem that the Elastodynamics of the Spacetime Con-tinuum cannot shed any light on the subject of dark matter and darkenergy. This in itself is not surprising as STCED does not deal with thecosmological scale, which is the sole domain of the Theory of GeneralRelativity as covered in §2.5.

Chapter 20
Conclusion
§20.1 A new spacetime physics theory
This book lays the foundations of a new theory of spacetime physics.STCED (Spacetime Continuum Elastodynamics) is a natural extensionof Einstein’s Theory of General Relativity. Whereas General Relativ-ity concentrates on the curvature of the spacetime continuum, STCEDanalyses the deformations of the spacetime continuum resulting in itscurvature. This gives rise to an integrated theory of gravitation andelectromagnetism. At the microscopic level, STCED leads to the anal-ysis of defects in the spacetime continuum, which gives rise to quan-tum physics. STCED is thus found to be a spacetime physics theory ofgravitation, electromagnetism and quantum physics. This book lays thetheoretical foundations of the Elastodynamics of the Spacetime Contin-uum, allowing physicists to study and perform research in this new areaof spacetime physics.
§20.2 Physical explanations
The theory presented in this book provides physical explanations formany of the phenomena that are currently unexplained or only partiallyexplained in physics. This spacetime physics theory of gravitation, elec-tromagnetism and quantum physics is based on a linear elastic theoryof the Elastodynamics of the Spacetime Continuum for the analysis ofthe deformations of the spacetime continuum. Quantum physics is tiedto defects in the spacetime continuum.
This book provides an integrated physical explanation derived fromSTCED of numerous currently unexplained phenomena including:
Nature and properties of the spacetime continuum. Thespacetime continuum of Einstein’s Theory of General Relativity, fromthe macroscopic to the microscopic, is not an empty canvas, but ratherhas physical properties of its own. One can always create an empty un-derlying mathematical structure used to “measure” the deviations of thespacetime continuum from a reference state, but there is no doubt thatthe spacetime continuum of physical theory is characterized by physicaldynamic properties. Einstein himself published similar statements. Seesection §1.1.

300 Chapter 20 Conclusion
Demonstration of strained spacetime. The presence of theenergy-momentum stress tensor in Einstein’s field equations implies thatforces are being applied to the spacetime continuum by the energy-momentum present in its structure. From continuum mechanics, weknow that the application of stresses to the spacetime continuum mustresult in strains in its structure, hence the terminology strained space-time. The strains present in the spacetime continuum result in thedisplacement of the elements of the spacetime continuum from equilib-rium, corresponding to spacetime continuum deformations. See sections§1.1.1 and §1.1.2. In section §1.2, we demonstrate from first principlesthat spacetime is indeed strained by the presence of mass.
Stress-strain relation of the spacetime continuum. Theintroduction of strains in the spacetime continuum as a result of theenergy-momentum stress tensor leads us to derive the stress-strain re-lation of the spacetime continuum, which is found to be similar to Ein-stein’s field equations in structure. The stress-strain relation is linear,implying a linear elastic continuum that obeys Hooke’s law. One ofthe consequences of linearity is that the principle of superposition isapplicable, as observed in physical laws. See section §2.2.
Decomposition of the metric tensor. We solve a long-standingproblem of general relativity. There is no straightforward definition oflocal energy density of the gravitational field in general relativity. Thisarises because the spacetime metric tensor includes both the backgroundspacetime metric and the local dynamical effects of the gravitationalfield. No natural way of decomposing the spacetime metric tensor intoits background and dynamical parts is known. We obtain a naturaldecomposition of the spacetime metric tensor into its background anddynamical parts. The dynamical part corresponds to the strains gener-ated in the spacetime continuum by the energy-momentum stress tensor.See section §1.2.
Decomposition of spacetime tensor fields of rank 2. Thedecomposition of spacetime tensor fields can be done in many ways.The application of continuum mechanics to the spacetime continuumoffers a natural decomposition of tensor fields, in terms of dilatationsand distortions. A dilatation corresponds to a change of volume ofthe spacetime continuum without a change of shape while a distortioncorresponds to a change of shape of the spacetime continuum withouta change in volume. This decomposition of spacetime tensor fields ofrank 2 in terms of dilatation and distortion components allows us to also

§20.2 Physical explanations 301
decompose relations involving these tensor fields into separate dilatationand distortion relations. See section §1.3.
Decomposition of the Ricci tensor. The Ricci tensor used ingeneral relativity is separated into dilatation and distortion components,by applying the natural decomposition of spacetime continuum tensorfields of rank 2 as seen previously. From this, we show that this results ina separation of the field equations of general relativity into a dilatationrelation and a distortion relation. This shows that the geometry ofthe spacetime continuum used in general relativity is generated by thecombination of all deformations present in the spacetime continuum.We then evaluate these equations in the weak field approximation toshow that the longitudinal dilatation mass relation leads to Poisson’sequation for a newtonian gravitational potential, and that the transversedistortion wave relation leads to the linearized field equation of gravityin the Transverse Traceless gauge. Hence the results derived in STCEDalso apply to general relativity. See section §2.4.
Wave-particle duality. Every excitation of the spacetime con-tinuum can be separated into a transverse (distortion) and a longitudi-nal (dilatation) mode of propagation. This decomposition of spacetimecontinuum deformations into a massive dilatation (“particle”) and amassless transverse wave distortion (“wave”) provides a mechanism forwave-particle duality. This provides an explanation of why dilatation-measuring apparatus measure the massive “particle” properties of thedeformation, while distortion-measuring apparatus measure the mass-less transverse “wave” properties of the deformation. See section §2.2,section §3.3 and chapter 12, in particular section §12.4.
Nature of rest-mass energy. The longitudinal mode of propa-gation involves an invariant change in volume of the spacetime contin-uum. Rest-mass energy, and hence matter, arises from this invariantvolume dilatation of the spacetime continuum. The rest-mass energy isequivalent to the energy required to dilate the volume of the spacetimecontinuum. It is a measure of the energy stored in the spacetime contin-uum that is perceived as mass. The volume dilatation is an invariant,as is the rest-mass energy density. Mass is thus part of the spacetimecontinuum fabric itself. In essence, matter does not warp spacetime,but rather, matter is warped spacetime (i.e. dilated spacetime). Theuniverse consists of the spacetime continuum and energy-momentumthat propagates in it by deformation of its (i.e. STC ) structure. Seesection §2.3.

302 Chapter 20 Conclusion
Definition of mass. Another important consequence of this re-lation is that it provides a definition of mass. The definition of mass isstill one of the open questions in physics, with most authors adoptingan indirect definition of mass based on the ratio of force to acceleration.However, mass is one of the fundamental dimensions of modern systemsof units, and as such, should be defined directly, not indirectly. This isa reflection of the current lack of understanding of the nature of mass inmodern physics. STCED provides a direct physical definition of mass:mass is the invariant change in volume of spacetime in the longitudi-nal propagation of energy-momentum in the spacetime continuum. Seesection §2.3.
Dynamics of the spacetime continuum. The dynamics of thespacetime continuum is described by the displacement wave equation,which includes the accelerations from the applied forces. This equationcan be separated into longitudinal and transverse components, whichcorrespond to wave and particle displacement equations respectively,and hence include wave-particle duality in their formulation. See section§2.2 and section §2.3.
Nature of the graviton. We recall that the transverse modeof propagation involves no volume dilatation and is thus massless. Thestrain wave equation is a nonhomogeneous symmetric tensor field equa-tion. The quanta of this tensor field are equivalent to massless trans-verse waves of spin 2 and massive particles of spin 0. This explainswave-particle duality, with the spin 2 transverse mode corresponding tothe wave aspects and the spin 0 longitudinal mode corresponding to theparticle aspects. The massless transverse waves of spin 2 are the grav-itational waves of General Relativity with the corresponding gravitonquanta. See section §3.6, in particular section §3.6.4.
Electromagnetic potential four-vector. The theory provides aphysical explanation of the electromagnetic potential, which arises fromtransverse (shearing) displacements of the spacetime continuum, in con-trast to mass which arises from longitudinal (dilatational) displacementsof the spacetime continuum. Sheared spacetime is manifested as elec-tromagnetic potentials and fields. The constant of proportionality ϕ0
between the electromagnetic potential Aν and the transverse displace-ment (perpendicular to the direction of motion) uν⊥ is referred to as the“STC electromagnetic shearing potential constant”, and it has units of[V · s ·m−2] or equivalently [T]. See section §4.1.

§20.2 Physical explanations 303
Current density four-vector. The theory provides a physicalexplanation of the current density four-vector, which arises from thespacetime volume dilatation current (the dilatation current) which isgiven by the 4-gradient of the volume dilatation of the spacetime con-tinuum. A corollary of this relation is that massless (transverse) wavescannot carry an electric charge. See section §4.5.
Maxwell’s equations. Maxwell’s equations are derived from thetheory, and a generalization is obtained when a volume force Xν ispresent in the spacetime continuum. The current density four-vector isthe only quantity affected by the volume force, with the addition of asecond term proportional to the volume force. See section §4.2.
Lorenz condition. The Lorenz condition is obtained directly fromthe theory. The reason for the value of zero is that transverse displace-ments are massless because such displacements arise from a change ofshape (distortion) of the spacetime continuum, not a change of volume(dilatation). See section §4.4.
Electromagnetic waves. The transverse mode of propagationinvolves no volume dilatation and is thus massless. Electromagneticwaves are transverse waves propagating in the spacetime continuumitself. These massless transverse waves are solutions of the rotationalwave equation which is a nonhomogeneous antisymmetric tensor fieldequation equivalent to a massless vector wave equation. The quanta ofthe vector field are equivalent to massless spin 1 transverse waves. Seesection §3.6, in particular section §3.6.3, and section §12.1.
Speed of light. Energy propagates through the spacetime contin-uum as deformations of the continuum. The maximum speed at whichthe transverse distortions can propagate through the spacetime contin-uum is c, the speed of light. See section §3.2.2, section §9.2 and section§15.1.
Electromagnetic mass. From STCED, we see that the conceptof electromagnetic mass that was pursued in the nineteenth century isnot valid as electromagnetism is transverse and massless, and has nomassive longitudinal component. See section §4.8.1.
Special relativistic quadratic energy relation. This rela-tion is derived from the strain energy density which is separated intoa dilatation energy density term (the “mass” longitudinal term) and adistortion energy density term (the “massless” transverse term), which

304 Chapter 20 Conclusion
are quadratic terms. The kinetic energy pc is carried by the distor-tion part of the deformation, while the dilatation part carries only therest-mass energy. See section §5.2.
Mass of the photon. The longitudinal strain energy density(mass term) of the electromagnetic field is calculated and found to beequal to 0. Hence the rest-mass energy density of the photon is zero, i.e.the photon is massless. The transverse strain energy density (masslessterm) of the electromagnetic field is calculated and found to be pro-portional to the sum of the square of the electromagnetic field energydensity and the square of the Poynting vector. See section §5.3.
Poynting four-vector. By analogy with the current density four-vector jν = (c%, j), where % is the charge density, and j is the currentdensity vector, we define the Poynting four-vector Sν = (cUem,S) whereUem is the electromagnetic field energy density, and S is the Poyntingvector. Furthermore, Sν satisfies ∂νS
ν = 0 and SνSν is an invariant,
confirming that Sν as defined is a four-vector. See section §5.4.
Location of electromagnetic field energy. The indefinitenessof the location of the field energy referred to by Feynman [100, seep. 27-6] is resolved: the electromagnetic field energy resides in the dis-tortions (transverse displacements) of the spacetime continuum. Seesection §5.4.
Nature of photons. The strain energy density of the electromag-netic field includes a longitudinal electromagnetic energy flux which ismassless as it is due to distortion, not dilatation, of the spacetime con-tinuum. However, because this energy flux is along the direction ofpropagation (i.e. longitudinal), it gives rise to the photon, the particleaspect of the electromagnetic field. See section §5.4 and sections §12.2and §12.3.
Nature of the wavefunction. The quantum mechanical wave-function describes wave propagations in the spacetime continuum. The-se can be, depending on the particular wave equation considered, eitherlongitudinal wave propagations corresponding to the volume dilatationassociated with the particle property of an object, or transverse wavepropagations corresponding to the wave property of an object. In gen-eral, the appropriate physical interpretation of |Ψ|2 is that it representsthe physical intensity (energy density) of the transverse (distortion)wave, rather than the probability density of quantum theory. It cor-responds to the transverse field energy of the deformation. It is not

§20.2 Physical explanations 305
the same as the particle, which corresponds to the longitudinal (dilata-tion) wave displacement and is localized within the deformation via themassive volume dilatation. However, |Ψ|2 can be normalized with thesystem energy and converted into a probability density, thus allowingthe use of the existing probabilistic formulation of quantum theory. Ad-ditionally, the physical intensity waves of STCED help us understandthe physics of wave-particle duality and resolve the paradoxes of quan-tum theory. See section §7.3 and chapter 12, in particular section §12.4.
Klein-Gordon-like equation. The longitudinal wave equationderived from a quantum mechanically derived volume force correspondsto a Klein-Gordon-like equation with a source term corresponding to aninteraction term of the form A · j. This term is interpreted in electro-magnetism as energy in the static magnetic induction field to establishthe steady current distribution. It is also the form of the interactionterm introduced in the vacuum Lagrangian for classical electrodynam-ics. See section §7.3.1.
Magnetic torque density equation. The transverse wave equa-tion derived from a quantum mechanically derived volume force is a newequation of the electromagnetic field strength Fµν , which includes aninteraction term of the form A × j. In electromagnetism, this term isthe volume density of the magnetic torque (magnetic torque density),and is interpreted as the “longitudinal tension” between two successivecurrent elements (Helmholtz’s longitudinal tension), observed experi-mentally by Ampere (hairpin experiment). See section §7.3.2.
Proca-like equation. The displacement wave equation in thecase of a quantum mechanically derived volume force is similar to aProca-like vector field equation. See sections §4.8.2 and §7.3.5.
Quantum physics and defects in the spacetime continuum.Dislocation and disclination defects in the spacetime continuum repre-sent the fundamental displacement processes that occur in its structure.These fundamental displacement processes correspond to basic quantumphenomena and provide a framework for the description of quantumphysics in STCED. Dislocations are translational deformations, whiledisclinations are rotational deformations. These provide a descriptionof basic quantum processes in the microscopic description of the space-time continuum. See section §8.1.
Spacetime continuum quantization. At the quantum level,we assume that the spacetime continuum has a granularity character-ized by a length b0 corresponding to the smallest elementary Burgers

306 Chapter 20 Conclusion
dislocation-displacement vector possible in the spacetime continuum.The calculated value of b0 is found to be equivalent to the Planck length`P within the approximations of the derivation. The existence of a short-est length in nature leads to a natural cut-off to generate finite integralsin QED. The smallest elementary Burgers dislocation-displacement vec-tor thus provides a lower bound in QED calculations. See section §14.2and sections §19.1 and §19.2.
Nature of bosons and fermions. We find that dislocations anddisclinations have fundamental properties that reflect those of parti-cles at the quantum level. Dislocations are translational displacementsthat commute, satisfy the superposition principle and behave as bosons.Disclinations, on the other hand, are rotational displacements that donot commute, do not obey the superposition principle and behave asfermions. Dislocations, as translational processes, are found to corre-spond to bosons, while disclinations, as rotational processes, are foundto correspond to fermions, based on their characteristics and symmetrytransformations. See sections §14.1 and §14.4.
Quantum particles as spacetime continuum defects. We findthat dislocations and disclinations have fundamental properties that re-flect those of particles at the quantum level. Dislocations, as transla-tional processes, are found to correspond to bosons, while disclinations,as rotational processes, are found to correspond to fermions, based ontheir characteristics and symmetry transformations. See sections §14.1and §14.4.
Screw dislocations and photons. Screw dislocations are trans-lational displacements that commute, satisfy the superposition principleand behave as bosons. Screw dislocations in the spacetime continuumare massless, transverse deformations, and are hence identified specifi-cally with photons. The speed of the transverse displacement is c, thespeed of light. The field ωµν is of spin 1, and since it is massless, itdoes not have a spin 0 component. From section §9.2.3, the rest-massdensity of the screw dislocation is ρ = 0, and from section §9.2.4, so isits charge density % = 0 and its current density jν = 0. See sections§3.6, §9.2, §15.1, §18.1.1 and §18.3.1.
Edge dislocations and bosons. Edge dislocations are trans-lational displacements that commute, satisfy the superposition princi-ple and behave as bosons. Edge dislocations are equivalent to massivelongitudinal wave solutions propagating along the direction of motionand massless transverse wave solutions. The quanta of the longitudinal

§20.2 Physical explanations 307
waves are spin 0 massive particles, while the quanta of the masslesstransverse waves are of spin 2. This explains wave-particle duality, withthe spin 2 transverse mode corresponding to the wave aspects and thespin 0 longitudinal mode corresponding to the particle aspects. Themassless transverse waves of spin 2 are the gravitational waves of Gen-eral Relativity with the corresponding graviton quanta. The total strainenergy of edge dislocations gives the total energy of the bosons, as thesum of the longitudinal particle aspect of the bosons and the wave as-pect of the bosons. As seen in chapter 12, the latter is associated withthe wavefunction of the boson. The spin characteristics of these are seento correspond to a combination of spin 0 (mass as deformation particleaspect) and spin-2 (deformation wave aspect) solutions. There are alsolongitudinal and transverse wave solutions of a Proca-like vector fieldequation, of spin 0 and 1 respectively, in the case of a non-zero volumeforce as is expected at the quantum level. See sections §3.6, §4.8.2,§7.3.5, §9.3, §15.2 and §18.1.1.
Wedge disclinations and quarks. Wedge disclinations, as ro-tational processes, are found to correspond to fermions, based on theircharacteristics and symmetry transformations. Both the longitudinalstrain energy and the transverse strain energy are proportional to Λ2
in the limit Λ bc. The parameter Λ is equivalent to the extent ofthe wedge disclination, and we find that as it becomes more extended,its strain energy is increasing parabolically. This behaviour is similarto that of quarks (confinement) which are fermions. In addition, asΛ→ bc, the strain energy decreases and tends to 0, again in agreementwith the behaviour of quarks (asymptotic freedom). We thus identifywedge disclinations with quarks. See sections §10.6, §15.3 and §18.1.2.
Splay disclinations and leptons. Splay disclinations, as rota-tional processes, are found to correspond to fermions, based on theircharacteristics and symmetry transformations. The longitudinal (mas-sive) strain energy of the splay disclination is proportional to ln Λ/bc, asare the screw dislocation (photon) and edge dislocation (bosons). How-ever, the transverse (massless) strain energy does not have this simplerdependence, but a more complicated functional dependence. This, andthe results of the next subsection, leads us to identify the splay disclina-tions with the charged leptons (electron, muon, tau) fermions, where theheavier muon and tau are expected to be excited states of the electron.See sections §10.7, §15.4 and §18.1.2.
Pure twist disclinations and neutrinos. Pure twist discli-nations, as rotational processes, are found to correspond to fermions,

308 Chapter 20 Conclusion
based on their characteristics and symmetry transformations. The lon-gitudinal strain energy of the pure twist disclination is equal to zero andhence massless. Since the pure twist disclination is a massless fermion,this leads us to identify the pure twist disclination with the neutrino. Itshould be noted that even though the mass of the neutrino is currentlyestimated to be on the order of 10’s of eV, this estimate is based onassuming neutrino oscillation between the currently known three leptongenerations, to explain the anomalous solar neutrino problem. This isstill a tentative explanation. Until the anomaly is fully understood, wecan consider the pure twist disclination physical model where the massof the neutrino is zero to be at least a first approximation of the neutrinoSTC defect model, subject to refinement as the nature of the anomaloussolar neutrino problem is better understood. See sections §10.7, §15.4and §18.1.2.
Identification of quantum particles summary. The identi-fication of the quantum particles based on their associated spacetimedefects is summarized in the following table (see §18.1.3). See sections
STC defect Type of particle Particles
Screw dislocation Massless boson Photon
Edge dislocation Massive boson Spin-0 particle
Spin-1 Proca eqn
Spin-2 graviton
Wedge disclination Massive fermion Quarks
Splay disclination Massive fermion Leptons
True twist disclination Massless fermion Neutrino
§18.1 and §18.1.3.
Nature of QED interactions. Strain energy is the fundamentaldefining energy characteristic of defects and their interactions in thespacetime continuum. In STCED, the interaction of dislocations anddisclinations is mediated through the interaction of their strain energydensity. We find that this interaction of the strain energy density resultsfrom the overlap of the strain energy densities of defects, a process akinto the wavefunction overlap of quantum mechanics, which is physicallyexplained by this process in STCED. The calculation of time-dependentdislocation strain energy involves polylogarithms which also arise inFeynman diagram integrals (and, in particular, in the computation of

§20.2 Physical explanations 309
quantum electrodynamics corrections to the electron gyromagnetic ra-tio). This is a further indication that the interaction of strain energiesare the physical source of quantum interaction phenomena described byFeynman diagrams. See section §14.5, sections §16.1.2 and §16.2.2 andsection §17.1.
Nature of virtual particles. In STCED, the role played byvirtual particles in quantum electrodynamics (QED) is replaced by theinteraction of the strain energy density of the dislocations and disclina-tions. As stated by Weingard [274], “the question of the existence ofvirtual particles is really the question of how to interpret the propaga-tors which appear in the perturbation expansion of vacuum expectationvalues (scattering amplitudes)”. The exchange of virtual particles ininteractions can be seen to be a perturbation expansion representationof the forces resulting from the overlap of the defects’ strain energydensity. QED is a perturbative theory, and the virtual particles are in-troduced as an interpretation of the perturbative expansion representedby Feynman diagrams. See section §14.5.
Explanation of Feynman diagrams. The basic Feynman di-agrams can be seen to represent screw dislocations as photons, edgedislocations as bosons, twist and wedge disclinations as fermions, andtheir interactions. More specifically, the external legs of Feynman di-agrams that are on mass-shell representing real particles correspondto dislocations and disclinations, while the virtual off mass-shell parti-cles are replaced by the interaction of the strain energy densities. TheFeynman diagram propagators are replaced by the defect strain energydensity interaction expressions. See section §18.2.
Explanation of photon-photon scattering. In QED, photon-photon interactions are known as photon-photon scattering and arethought to be mediated by virtual particles. This reflects the pertur-bative calculation used to evaluate the scattering, but as shown in thiswork, photon-photon interactions physically result from the overlap oftheir strain energy density, and can be calculated directly. See section§18.3.1.
Explanation of photon-neutrino interactions. It is surpris-ing to find that the massless, electrically neutral, weakly interactingneutrino would interact with the massless, electrically neutral, electro-magnetic interacting photon. STCED provides for their interaction viathe force resulting from the interaction of the strain energy densities

310 Chapter 20 Conclusion
of screw dislocations and pure twist disclinations, which correspond tophoton-neutrino interactions. See section §18.3.2.
QED self-energies. The dislocation self-energy is related to thedislocation self-force. The dislocation self-force arises from the forceon an element in a dislocation caused by other segments of the samedislocation line. This process provides an explanation for the QED self-energies without the need to resort to the emission/absorption of virtualparticles. It can be understood, and is particular to, dislocation dynam-ics as dislocations are defects that extend in the spacetime continuum.See section §18.4.1.
QED mass renormalization. Mass renormalization arises inQED due to the incomplete description of particle energies at the quan-tum level. In this book, we show that the strain energy density of anedge dislocation, which corresponds to a particle, consists of a longitu-dinal dilatation mass density term and a transverse distortion energydensity term. QED, in its formulation, only uses the transverse dis-tortion strain energy density in its calculations, which is referred to asthe bare mass m0. However, there is no dilatation mass density termused in QED, and hence no possibility of properly deriving the mass.The bare mass m0 is thus renormalized by replacing it with the actualexperimental mass m. Using the longitudinal dilatation mass densityterm provides the correct mass m and eliminates the need for massrenormalization. See section §18.4.2.
Non-locality of quantum phenomena. Defects in the space-time continuum give rise to nonlocal effects. Discrete line defects ex-tend in the spacetime continuum, and hence interact nonlocally, muchas nonlocal interactions between distant atoms determine the propertiesof materials in solid-state physics. See section §18.5.
Entangled states in quantum physics. As noted in §18.5, thephysical extension of defects in the spacetime continuum gives rise tononlocal effects and to what are referred to as “entangled states” inquantum physics. Entangled states correspond to the overlap of defectsin the spacetime continuum, overlaps that can extend between distantdefects, and are characterized by the interaction of their strain energydensities. See section §18.6.
Spacetime continuum constants. Based on the identificationof screw dislocations in the spacetime continuum with photons, therelation between the Burgers constant b0 and Planck’s constant h is

§20.3 Evolution of the theory 311
determined. Planck’s constant is expressed in terms of the spacetimecontinuum constants. The calculated value of b0 is found to be equiva-lent to the Planck length `P within the approximations of the derivation.Numerical values of the spacetime constants are derived and a consis-tent set of analytical forms of the spacetime constants is proposed. Seesections §19.1 and §19.2.
Nature of Action in the spacetime continuum. We eluci-date the nature of Action in the spacetime continuum. Energy appliesto three-dimensional space, while Action applies to four-dimensionalspacetime, where it has a role in four-dimensional spacetime similar toenergy in three-dimensional space. We thus find that Action is the fun-damental four-dimensional spacetime scalar quantity corresponding toenergy for three-dimensional space. This helps explain why equationsof motion are determined by minimizing action, not energy, using theprinciple of least (or stationary) action. See section §19.3.
§20.3 Evolution of the theory
A solid foundation of a new theory of spacetime physics, the theory ofthe Elastodynamics of the Spacetime Continuum has been laid, fromwhich further development can be achieved. This book lays the theo-retical foundations of Spacetime Continuum Elastodynamics (STCED),to encourage physicists to study and perform research in this new areaof spacetime physics.
The underlying principle of this theory is that the spacetime contin-uum is the source and the seat of all physical processes. The dynamicsof the spacetime continuum is represented by the energy-momentumpropagating as deformations in its structure. This thread is the guidingprinciple in the development of STCED.
Certainly much progress has been achieved towards this goal, but,however, more, much more, remains to be developed. Suggested futuredirections of investigation and areas of exploration to extend the theoryinclude as candidates worthy of further study:
- Detailed application and calculations using the theoretical devel-opments derived in this book.
- Exploration of alternative volume forces Xν derived from otheridentifications of related physical results.
- Development of the theory in Einstein-Cartan spaces beyond thepreliminary incorporation of torsion considered in this book, basedon Elie Cartan’s differential forms formulation.

312 Chapter 20 Conclusion
- Further derivation of quantum electrodynamics results based onthe presence of defects, such as dislocations and disclinations, inthe spacetime continuum.
- Extension of the theory based on the evolution of Continuum Me-chanics in the last one hundred years, including Eshelbian Me-chanics [174] and the Mechanics of Generalized Continua [4].
Further development of STCED is expected to provide additional in-sight into the fundamental nature of the spacetime continuum and ofphysical theory.

Glossary of Physical Symbols
This book uses symbols across the fields of continuum mechanics,elasticity, general relativity, electromagnetism and quantum mechanics.The symbols used need to be applicable across these disciplines and beself-consistent. A glossary of the physical symbols is included below tofacilitate the reading of this book.
α Fine-structure constant.
α Reciprocal of Lorentz gamma-factor.
αl Reciprocal of Lorentz longitudinal gamma-factor.
α2 Reciprocal of Lorentz half-velocity gamma-factor.
α0 Reduced µ0 constant.
αµν Dislocation density.
β0 Reduced µ0 + λ0 constant.
βµν Distortion tensor.∗βµν Effective distortion tensor.
/βµν Defect distortion tensor.
γ Lorentz gamma-factor.
γl Lorentz longitudinal gamma-factor.
γ2 Lorentz half-velocity gamma-factor.
γ0 Reduced λ0 constant.
Γλµν Connection coefficient.
Γµνλ Modified connection coefficient.
δ0 Reduced β0/α0 constant.
δµν Kronecker delta.
εαβµν Permutation symbol in four-dimensional spacetime.
ε0 Electromagnetic permittivity of free space (STC ).
ε Volume dilatation.
εµν Strain tensor.∗εµν Effective strain tensor.
/εµν Defect strain tensor.
ηµν Flat spacetime or Minkowski metric tensor.

314 Glossary
θµν Disclination density.
Θµν Symmetric electromagnetic stress tensor.
κ0 Bulk modulus of the STC.
κµν Bend-twist tensor.
λ Wavelength.
λ Quantum mechanical hidden variable.
λ0 Lame elastic constant of the STC.
λc Compton wavelength of the electron.
Λ Cutoff parameter corresponding to the extent of a defect.
µ0 Shear modulus Lame elastic constant of the STC.
µ0 Electromagnetic permeability of free space (STC ).
µB Bohr magneton.
µν, λ Christoffel symbol of the first kind.λµ ν
Christoffel symbol of the second kind.
ν Frequency.
ν Poisson ratio.
(ξ, η, ζ) Cartesian coordinates.
ξν Dislocation line direction.
ξν Dilatation current.
ρ Rest-mass density.
ρ0 STC density.
% Charge density.
σij Cauchy stress tensor / Maxwell stress tensor.
σµν Stress tensor.
υ Dilatation/wavefunction proportionality constant.
φ Electromagnetic scalar potential.
ϕ0 STC electromagnetic shearing potential constant.
Φ Static newtonian gravitational field.
ων Rotation or spin vector.
ωµν Rotation tensor.∗ωµν Effective rotation tensor.
/ωµν Defect rotation tensor.
Ων Frank vector.

Glossary 315
Ω−ν Reduced Frank vector.
Ωµν Associated Frank rotation tensor.
ψ Quantum mechanical wavefunction.
Ψ Multi-component quantum mechanical wavefunction.
Ψ Energy density of the transverse (distortion) wave.
A Vector potential.
Aµ Four-vector potential.
A∗ν Reduced four-vector potential..
b0 STC elementary Burgers displacement vector.
bc Size of defect core.
bν Burgers four-vector.
bν Reduced Burgers vector.
bij Eshelby stress tensor.
B Magnetic field.
c Speed of light.
cl Speed of longitudinal waves.
ct Speed of transverse waves equivalent to the speed of light.
D Electric displacement field.
Dr Disclinations (rotation) consisting of Screw , Edge .Dt Dislocations (translation) consisting of Wedge , Twist .e Electrical charge of the electron.
es Strain scalar.
eµν Strain deviation tensor.
eαβµν Covariant Levi-Civita pseudotensor.
E Electric field.
E Total energy density.
E Strain energy density.
E‖ Dilatation strain energy density.
E⊥ Distortion strain energy density.
Eµναβ Elastic moduli tensor of the STC.
F Interaction force.
F(r, t) Riemann-Silberstein electromagnetic vector.
Fµν Electromagnetic field strength tensor.

316 Glossary
gi Momentum density vector.
gµν Metric tensor.
G Gravitational constant.
Gµν Einstein tensor in General Relativity.
Gµν Einstein tensor in Riemann-Cartan space.
Gµν Einstein tensor in Riemann space.
h Planck’s constant.
~ Reduced Planck’s constant.
hµν Perturbation of the flat spacetime metric tensor.
H Total energy density.
ıµν Incompatibility tensor.
j Current density vector.
jµ Current density four-vector.
j∗ν Reduced current density four-vector.
k0 Elastic force constant of the STC volume force.
kL STC longitudinal dimensionless ratio.
kT STC transverse dimensionless ratio.
k Wavevector.
kν Wavevector four-vector.
Kλµν Contortion tensor.
Kµνλ Modified contortion tensor.
` Length of a defect.
`P Planck length.
L Disclination line (axis).
Lin(x) Polylogarithm function.
L Lagrangian.
L Lagrangian density.
m Mass of the electron.
p Momentum 3-vector.
p Momentum density.
P ν Energy-momentum four-vector.
P Projection operator.
Q Total charge.

Glossary 317
(r, θ, ϕ) Spherical polar coordinates.
(r, θ, z) Cylindrical polar coordinates.
rs Ricci scalar.
rµν Ricci deviation tensor.
R Contracted Ricci curvature tensor.
R Defect separation.
Rµν Ricci curvature tensor.
Rµναβ Curvature tensor.
sj Energy flux vector.
S Action.
S0 STC elementary quantum of action.
S Poynting vector (electromagnetic field energy flux).
Sµ Poynting four-vector.
Sλµν Torsion tensor.
Sµνλ Modified torsion tensor.
ts Stress scalar.
tµν Stress deviation tensor.
T Contracted energy-momentum stress tensor.
Tµν Energy-momentum stress tensor.
uµ Displacement four-vector.
u‖µ Longitudinal displacement four-vector.
u⊥µ Transverse displacement four-vector.
Uem Electromagnetic field energy density.
v Velocity.
W Strain energy.
W‖ Dilatation strain energy.
W⊥ Distortion strain energy.
W12 Interaction strain energy.
(x, y, z) Cartesian coordinates.
xµ Position four-vector.
Xν Volume (or body) force.
Z0 Characteristic impedance of the vacuum (STC ).

318

Bibliography
1. Achenbach J. D. Wave Propagation in Elastic Solids. Elsevier, Amster-dam, 1975.
2. Aharoni J. The Special Theory of Relativity, 2nd rev. ed. Dover Publi-cations, New York, (1965) 1985, ch. 5.
3. Aharonov Y., Rohrlich D. Quantum Paradoxes: Quantum Theory forthe Perplexed. WILEY-VCH, Weinheim, 2005.
4. Altenbach H., Maugin G. A., Erofeev V., eds. Mechanics of GeneralizedContinua. Springer-Verlag, Berlin, 2011.
5. Aspect A, Dalibard J. and Roger G. Experimental test of Bell’s in-equalities using time-varying analyzers. Phys. Rev. Lett., 1982, v. 49,1804–1807.
6. Auletta G. Foundations and Interpretation of Quantum Mechanics.World Scientific Publishing, Singapore, 2001.
7. Auyang S. Y. How is Quantum Field Theory Possible? Oxford Univer-sity Press, Oxford, 1995.
8. Ballentine L. E. Quantum Mechanics: A Modern Development. WorldScientific Publishing, Singapore, 1998.
9. Balluffi R. W. Introduction to Elasticity Theory for Crystal Defects.Cambridge University Press, Cambridge, 2012.
10. Barut A. O. Electrodynamics and Classical Theory of Fields and Parti-cles. Dover Publications, New York, 1980.
11. Barut A. O., van der Merwe A. and Vigier J.-P. Quantum, Space andTime – The Quest Continues. Cambridge University Press, Cambridge,1983.
12. Basar Y., Weichert D. Nonlinear Continuum Mechanics of Solids: Fun-damental Mathematical and Physical Concepts. Springer, Berlin, 2000.
13. Baylis W. E. Electrodynamics: A Modern Geometric Approach. Birk-hauser, Boston, 2002.
14. Bell J. S. Speakable and Unspeakable in Quantum Mechanics. Cam-bridge University Press, Cambridge, 1987.
15. Bell J. S. On the Einstein–Podolsky–Rosen Paradox. Physics, 1964, v. 1,195–200. Reprinted in Bell J. S. Speakable and Unspeakable in QuantumMechanics. Cambridge University Press, Cambridge, 1987, pp. 14–21.
16. Bell J. S. On the Impossible Pilot Wave. Foundations of Physics, 1982,v. 12, 989–999. Reprinted in Bell J. S. Speakable and Unspeakable inQuantum Mechanics. Cambridge University Press, Cambridge, 1987,pp. 159–168.

320 Bibliography
17. Berdichevsky V. L. Variational Principles of Continuum Mechanics I –Fundamentals. Springer-Verlag, Berlin, 2009.
18. Berdichevsky V. L. Variational Principles of Continuum Mechanics II –Applications. Springer-Verlag, Berlin, 2009.
19. Bergstrom L. Non-Baryonic Dark Matter: Observational Evidence andDetection Methods. Reports on Progress in Physics, 2000, v. 63 (5), 793–841. arXiv: hep-ph/0002126.
20. Blair D. G., ed. The Detection of Gravitational Waves. Cambridge Uni-versity Press, Cambridge, 1991.
21. Bohm D. A Suggested Interpretation of the Quantum Theory in Termsof “Hidden” Variables I, II. Physical Review, 1952, v. 85, 166-–179, 180–193.
22. Bohr N. Can Quantum Mechanical Description of Reality Be ConsideredComplete? Phys. Rev., 1935, v. 48, 696.
23. Boi L. The Quantum Vacuum. The John Hopkins University Press,Baltimore, 2011.
24. Borzou A. and Sepangi H. R. Unification of Gravity and Electromag-netism Revisited. arXiv: gr-qc/0904.1363v3.
25. Bramm P. J. How Empty is the Vacuum? In Saunders S. and BrownH. R., eds. The Philosophy of Vacuum. Clarendon Press, Oxford, 2002,pp. 280–285.
26. Brekhovskikh L. M., Goncharov V. Mechanics of Continua and WaveDynamics, 2nd ed. Springer-Verlag, Berlin, 1994.
27. Brown H. R. and Harre R. Philosophical Foundations of Quantum FieldTheory. Clarendon Press, Oxford, 1988, p. 3.
28. Burgers J. M. Proc. Kon. Ned. Akad. Wetenschap., 1939, v. 42, 293, 378.
29. Byalinicki-Birula I. Photon Wave Function. In Wolf E., ed. Progressin Optics XXXVI. Elsevier, Amsterdam, 1996, 245–294. arXiv: quant-ph/0508202v1.
30. Byalinicki-Birula I. On the Wave Function of the Photon. Acta PhysicaPolonica A, 1994, v. 86, 97–116.
31. Byalinicki-Birula I. Acta Physica Polonica A, 1995, v. 34, 885.
32. Byalinicki-Birula I. The Photon Wave Function. In Eberly J. H., MandelL., Wolf E., eds. Coherence and Quantum Optics VII. Plenum, NewYork, 1996, 313–294.
33. Byalinicki-Birula I. Photon as a Quantum Particle. Acta PhysicaPolonica B, 2006, v. 37 (3), 935–946.
34. Callahan J. J. The Geometry of Spacetime: An Introduction to Specialand General Relativity. Springer, New York, 2000.

Bibliography 321
35. Cao T. Y. Conceptual Developments of 20th Century Field Theories.Cambridge University Press, Cambridge, 1997.
36. Cao T. Y., ed. Conceptual Foundations of Quantum Field Theory. Cam-bridge University Press, Cambridge, 2004.
37. Cao T. Y. From Current Algebra to Quantum Chromodynamics: A Casefor Structural Realism. Cambridge University Press, Cambridge, 2010.
38. Carcione J. M. Wave Fields in Real Media: Wave Propagation inAnisotropic, Anelastic, Porous and Electromagnetic Media, 2nd ed. rev.and ext. Elsevier, Amsterdam, 2007.
39. Carroll S. M. Spacetime and Geometry: An Introduction to GeneralRelativity. Addison Wesley, San Francisco, 2004.
40. Cartan E. On Manifolds with an Affine Connection and the Theory ofGeneral Relativity. Bibliopolis, Napoli, (1922,1955) 1986.
41. Chaikin P. M. and Lubensky T. C. Principles of Condensed MatterPhysics. Cambridge University Press, Camvridge, 1995.
42. Chandrasekar N. Quantum Mechanics of Photons. Adv. Studies Theor.Phys., 2012, v. 6 (8), 391–397.
43. Chandrasekharaiah D. S.. Debnath L. Continuum Mechanics. AcademicPress, Boston, 1994.
44. Chang Y.-F. Unification of Gravitational and Electromagnetic Fields inRiemannian Geometry. arXiv: gen-ph/0901.0201v1.
45. Charap J. M. Covariant Electrodynamics: A Concise Guide. The JohnHopkins University Press, Baltimore, 2011.
46. Chen X.-S., Zhu B.-C. Physical decomposition of the gauge and gravi-tational fields. arXiv: gr-qc/1006.3926v3.
47. Chen X.-S., Zhu B.-C. Tensor gauge condition and tensor field decom-position. arXiv: gr-qc/1101.2809v5.
48. Chernitskii A. A. On Unification of Gravitation and Electromagnetismin the Framework of a General-Relativistic Approach. arXiv: gr-qc/0907.2114v1.
49. Ciarlet P. G. An Introduction to Differential Geometry with Applica-tions to Elasticity. Springer, Dordrecht, 2005.
50. Ciufolini I. and Wheeler J. A. Gravitation and Inertia. Princeton Uni-versity Press, Princeton, 1995.
51. Constantinescu A., Korsunsky A. Elasticity with Mathematica: An In-troduction to Continuum Mechanics and Linear Elasticity. CambridgeUniversity Press, Cambridge, 2007.
52. Cook D. M. The Theory of the Electromagnetic Field. Dover Publica-tions, New York, 2002.

322 Bibliography
53. d’Espagnat B. Reality and the Physicist: Knowledge, Duration and theQauntum World. Cambridge University Press, Cambridge, 1989.
54. d’Espagnat B. On Physics and Philosophy. Princeton University Press,Princeton, 2006.
55. Dauxois T., Peyrard M. Physics of Solitons. Cambridge UniversityPress, Cambridge, 2006.
56. Davis J. L. Mathematics of Wave Propagation. Princeton UniversityPress, Princeton, 2000.
57. de Broglie L. Non-Linear Wave Mechanics. Elsevier Publishing, Ams-terdam, 1960.
58. de Broglie L. Les incertitudes d’Heisenberg et l’interpretation pro-babiliste de la Mecanique Ondulatoire. Gauthier-Villars, Paris, 1982.Available in English: Heisenberg’s Uncertainties and the ProbabilisticInterpretation of Wave Mechanics. Kluwer Academic Publishers, Dor-drecht, 1990.
59. deWit R. Linear Theory of Static Disclinations. in Simmons J. A. anddeWit R., Bullough R, eds. Fundamental Aspects of Dislocation Theory,Conference Proceedings, National Bureau of Standards, April 21-25,1969. National Bureau of Standards, Special Publication 317, VolumeI, Washington, DC, 1970, pp. 651–673.
60. deWit R. Theory of Disclinations: II. Continuous and Discrete Discli-nations in Anisotropic Elasticity. Journal of Research of the NationalBureau of Standards – A. Physics and Chemistry, 1973, vol. 77A (1),pp. 49–100.
61. deWit R. Theory of Disclinations: III. Continuous and Discrete Discli-nations in Isotropic Elasticity. Journal of Research of the NationalBureau of Standards – A. Physics and Chemistry, 1973, vol. 77A (3),pp. 359–368.
62. deWit R. Theory of Disclinations: IV. Straight Disclinations. Journal ofResearch of the National Bureau of Standards – A. Physics and Chem-istry, 1973, vol. 77A (5), pp. 607–658.
63. Deser S. Covariant decomposition of symmetric tensors and the gravita-tional Cauchy problem. Annales de l’I.H.P., Section A, 1967, vol. 7 (2),149–188.
64. Diner S., Fargue D., Lochak G. and Selleri F. The Wave-Particle Du-alism: A Tribute to Louis de Broglie on his 90th Birthday. D. ReidelPublishing, Dordrecht, 1984.
65. Dixon W. G. Special Relativity: The Foundation of MacroscopicPhysics. Cambridge University Press, Cambridge, 1982, ch. 3.
66. Dodd R. K., Eilbeck J. C., Gibbon, J. D., Morris H. C. Solitons and Non-linear Wave Equations. Academic Press, London, 1984.

Bibliography 323
67. Doughty, N. A. Lagrangian Interaction: An Introduction to RelativisticSymmetry in Electrodynamics and Gravitation. Westview Press, Read-ing, MA, 1990.
68. Drumheller D. S. Introduction to Wave Propagation in Nonlinear Fluidsand Solids. Cambridge University Press, Cambridge, 1998.
69. Duncan A. The Conceptual Framework of Quantum Field Theory. Ox-ford University Press, Oxford, 2012.
70. Durr D., Teufel, S. Bohmian Mechanics: The Physics and Mathematicsof Quantum Theory. Springer-Verlag, Berlin, 2009.
71. Eddington A. S. Space, Time & Gravitation. Cambridge UniversityPress, Cambridge, (1920) 1987.
72. Eddington A. S. The Mathematical Theory of Relativity. CambridgeUniversity Press, Cambridge, 1957.
73. Edelen, D. G. B. and Lagoudas D. C. Gauge Theory and Defects inSolids. North-Holland Publishing, Amsterdam, 1988.
74. Einstein A. Zur Electrodynamik bewegter Korper. Annalen der Physik,1905, vol. 17. English translation (On the Electrodynamics of MovingBodies) reprinted in Lorentz H. A., Einstein A., Minkowski H, and WeylH. The Principle of Relativity: A Collection of Original Memoirs onthe Special and General Theory of Relativity. Dover Publications, NewYork, 1952, pp. 37–65.
75. Einstein A. Ist die Tragheit eines Korpers von seinem Energiegehaltabhangig? Annalen der Physik, 1905, vol. 17. English translation (Doesthe Inertia of a Body Depend upon its Energy-Content?) reprinted inLorentz H. A., Einstein A., Minkowski H, and Weyl H. The Principle ofRelativity: A Collection of Original Memoirs on the Special and GeneralTheory of Relativity. Dover Publications, New York, 1952, pp. 69–71.
76. Einstein A. Kosmologische Betrachtungen zur allgemeinen Relativitats-theorie. Sitzungsberichte der Preussischen Akad. d. Wissenschaften,1917, vol. 17, pp. 142–152. English translation (Cosmological Consider-ations on the General Theory of Relativity) reprinted in Lorentz H. A.,Einstein A., Minkowski H, and Weyl H. The Principle of Relativity: ACollection of Original Memoirs on the Special and General Theory ofRelativity. Dover Publications, New York, 1952, pp. 175–188.
77. Einstein A. Die Grundlage der allgemeinen Relativitatstheorie. Annalender Physik, 1916, vol. 49. English translation (The Foundation of theGeneral Theory of Relativity) reprinted in Lorentz H. A., Einstein A.,Minkowski H, and Weyl H. The Principle of Relativity: A Collectionof Original Memoirs on the Special and General Theory of Relativity.Dover Publications, New York, 1952, pp. 109–164.

324 Bibliography
78. Einstein A. Dialog uber Einwande gegen die Relativitatstheorie. DieNaturwissenschaften, 1918, vol. 6, pp. 697–702. English translation inKostro L. Einstein and the Ether. Apeiron, Montreal, 2000, p. 76.
79. Einstein A. Relativity: The Special and the General Theory. CrownPublishers, New York, 1961.
80. Einstein A, Podolsky B. and Rosen N. Can Quantum-Mechanical De-scription of Physical Reality Be Considered Complete? Phys. Rev.,1935, v. 47, 777–780.
81. Engelbrecht J. Nonlinear Wave Dynamics. Kluwer Academic Publishers,Dordrecht, 1997.
82. Epstein M. The Geometrical Language of Continuum Mechanics. Cam-bridge University Press, Cambridge, 2010, pp. 323–335.
83. Eringen A. C., ed. Continuum Physics Volume I – Mathematics. Aca-demic Press, New York, 1971.
84. Eringen A. C., ed. Continuum Physics Volume II – Continuum Mechan-ics of Single-Substance Bodies. Academic Press, New York, 1975.
85. Eringen A. C., ed. Continuum Physics Volume III – Mixtures and EMField Theories. Academic Press, New York, 1976.
86. Eringen A. C., ed. Continuum Physics Volume IV – Polar and NonlocalField Theories. Academic Press, New York, 1976.
87. Eringen A. C., Suhubi, E. S. Elastodynamics Volume I – Finite Motions.Academic Press, New York, 1974.
88. Eringen A. C., Suhubi, E. S. Elastodynamics Volume II – Linear Theory.Academic Press, New York, 1975.
89. Eringen A. C., Maugin, G. A. Electrodynamics of Continua I – Founda-tions and Solid Media. Springer-Verlag, New York, 1990.
90. Eringen A. C., Maugin, G. A. Electrodynamics of Continua II – Fluidsand Complex Media. Springer-Verlag, New York, 1990.
91. Eringen A. C. Nonlocal Continuum Field Theories. Springer-Verlag,New York, 2002.
92. Eshelby J. D. Elastic Inclusions and Inhomogeneities. Progr. Solid Me-chanics, 1961, v. 2, 89–140.
93. Eshelby J. D. Energy Relations and the Energy-Momentum Tensor inContinuum Mechanics. in Kanninen M. F., Adler W. F., Rosenfield A. R.and Jaffee R. I., eds. Inelastic Behavior of Solids. McGraw-Hill, NewYork, 1970, pp. 77–115.
94. Eshelby J. D. The Elastic Energy-Momentum Tensor. Journal of Elas-ticity, 1975, v. 5, 321–335.
95. Eshelby J. D. The Energy-Momentum Tensor of Complex Continua. inKroner, E. and Anthony K.-H., eds. Continuum Models of Discrete Sys-tems. University of Waterloo Press, Waterloo, 1980, pp. 651–665.

Bibliography 325
96. Eshelby J. D. Aspects of the Theory of Dislocations. in Hopkins H. G.and Sewell M. J., eds. Mechanics of Solids – The Rodney Hill 60th An-niversary Volume.Pergamon Press, Oxford, 1982, pp. 185–225.
97. European Southern Observatory. Serious Blow to Dark Matter Theo-ries? Press Release eso 1217, 18 April 2012.
98. Ferrarese G.; Bini D. Introduction to Relativistic Continuum Mechanics.Springer, New York, 2008.
99. Feynman R. P. Space-Time Approach to Non-Relativistic Quantum Me-chanics. Rev. Mod. Phys., 1948, v. 20, 367–387. Reprinted in Schwinger,J., ed. Selected Papers on Quantum Electrodynamics. Dover Publica-tions, New York, 1958, pp 321–341.
100. Feynman R. P., Leighton R. B., Sands M. Lectures on Physics, VolumeII: Mainly Electromagnetism and Matter. Addison-Wesley PublishingCompany, Reading, Massachusetts, 1964.
101. Feynman R. P., Leighton R. B., Sands M. Lectures on Physics, VolumeIII: Quantum Mechanics. Addison-Wesley Publishing Company, Read-ing, Massachusetts, 1965.
102. Feynman R. P., Morinigo R. B., Wagner W. G., Hatfield, B., ed. Feyn-man Lectures on Gravitation. Westview Press, Boulder, CO, 2003.
103. Fine A. The Shaky Game: Einstein Realism and the Quantum Theory,2nd ed. The University of Chicago Press, Chicago, 1996.
104. Flugge W. Tensor Analysis and Continuum Mechanics. Springer-Verlag,New York, 1972.
105. Frank F. C. Disc. Faraday Soc., 1958, v. 25, 19.
106. Friedlander F. G. The Wave Equation on a Curved Space-Time. Cam-bridge University Press, Cambridge, 1975.
107. Friedman M. Foundations of Space-Time Theories: Relativistic Physicsand Philosophy of Science. Princeton University Press, Princeton, 1983.
108. Georgi H. Tensor Lie Algebras in Particle Physics. Ben-jamin/Cummings, 1982.
109. Goldstein S., Norsen T., Tausk D. V., Zanghi N. Bell’s Theorem. Schol-arpedia, 2011, v. 6 (10), 8378.
110. Goldstein S. Bohmian Mechanics. The Stanford Encyclopedia of Phi-losophy, 2013, http://plato.stanford.edu/archives/spr2013/entries/qm-bohm/.
111. Gouesbet G. Hidden Worlds in Quantum Physics. Dover Publications,New York, 2013, pp. 280–303.
112. Graff K. F. Wave Motion in Elastic Solids. Dover Publications, NewYork, 1975.
113. Greiner W. Relativistic Quantum Mechanics: Wave Equations.Springer-Verlag, New York, 1994.

326 Bibliography
114. Griffiths R. B. Consistent Quantum Theory. Cambridge UniversityPress, Cambridge, 2002, pp. 323–335.
115. Gurtin M. E. An Introduction to Continuum Mechanics. AcademicPress, San Diego, 1981.
116. Hansson J. On the Origin of Elementary Particle Masses. Progress inPhysics, 2014, v. 10, 45–47.
117. Hasselbach F. Recent Contributions of Electron Interferometry to Wave-Particle Duality. In Selleri F., ed. Wave-Particle Duality. Plenum, NewYork, 1992, 109–125.
118. Hayes W., Stoneham A. M. Defects and Defect Processes in NonmetallicSolids. Dover Publications, New York, (1985) 2004.
119. Heinbockel J. H. Introduction to Tensor Calculus and Continuum Me-chanics. Trafford Publishing, Victoria, BC, 2001.
120. Heitler W. The Quantum Theory of Radiation, 3rd ed. Dover Publica-tions, New York, 1984.
121. Hetnarski R. B., Ignaczak J. The Mathematical Theory of Elasticity, 2nd
ed. CRC Press, Boca Raton, 2011.
122. Heymann Y. Dark Matter, the Correction to Newton’s Law in a Disk.Progress in Physics, 2016, v. 12, 347–352.
123. Hirth R. M. and Lothe J. Theory of Dislocations, 2nd ed. Krieger Pub-lishing Co., Florida, 1982.
124. Holland P. R. The Quantum Theory of Motion: An Account of the deBroglie-Bohm Causal Interpretation of Quantum Mechanics. CambridgeUniversity Press, Cambridge, 1993.
125. Holzapfel G. A. Nonlinear Solid Mechanics: A Continuum Approach forEngineering. John Wiley & Sons, New York, 2000.
126. Home D., Whitaker A. Einstein’s Struggles with Quantum Theory: AReappraisal. Springer, New York, 2007.
127. Horie K. Geometric Interpretation of Electromagnetism in a Gravita-tional Theory with Space–Time Torsion. arXiv: hep-th/9409018v1.
128. Hossenfelder S. Phenomenology of Space-time Imperfection I: NonlocalDefects. arXiv: hep-ph/1309.0311.
129. Hossenfelder S. Phenomenology of Space-time Imperfection II: LocalDefects. arXiv: hep-ph/1309.0314.
130. Hossenfelder S. Theory and Phenomenology of Spacetime Defects.arXiv: hep-ph/1401.0276.
131. Hudson J. A. The Excitation and Propagation of Elastic Waves. Cam-bridge University Press, Cambridge, 1980.
132. Hull D. and Bacon D. J. Introduction to Dislocations, 5th ed. ElsevierLtd., Amsterdam, 2011.

Bibliography 327
133. Hunter G., Jeffers S. and Vigier J.-P. Causality and Locality in ModernPhysics. Kluwer Academic Publishers, Dordrecht, 1998.
134. Infeld E. and Rowlands G. Nonlinear Waves, Solitons and Chaos. Cam-bridge University Press, Cambridge, 1992.
135. Jabs A. Connecting Spin and Statistics in Quantum Mechanics. arXiv:quant-ph/0810.2300v4.
136. Jackson J. D. Classical Electrodynamics, 2nd ed. John Wiley & Sons,New York, 1975.
137. Jammer M. Concepts of Mass in Classical and Modern Physics. DoverPublications, New York, (1961) 1997.
138. Jammer M. Concepts of Space: The History of Theories of Space inPhysics, 3rd enlarged ed. Dover Publications, New York, 1993.
139. Jammer M. Concepts of Mass in Contemporary Physics and Philosophy.Princeton University Press, Princeton, 2000.
140. Jaramillo J. L., Gourgoulhon E. Mass and Angular Momentum in Gen-eral Relativity. arXiv: gr-qc/1001.5429v2.
141. Jaynes E. T. Clearing Up Mysteries – The Original Goal. In SkillingJ., ed. Proceedings Volume, Maximum Entropy and Bayesian Methods.Kluwer Academic Publishers, Dordrecht, 1989, pp. 1–27.
142. Jaynes E. T. Probability in Quantum Theory. In Zurek W. H., ed. Com-plexity, Entropy and the Physics of Information. Addison Wesley Pub-lishing, Reading, MA, 1990.
143. Jaynes E. T., Bretthorst G. L. (ed.) Probability Theory; The Logic ofScience. Cambridge University Press, Cambridge, 2003.
144. Jeffreys H. Scientific Inference. Cambridge University Press, Cambridge,1931.
145. Jeffreys H. Theory of Probability. Oxford University Press, Oxford,1939.
146. Kadic A., Edelen D. G. B. A Gauge Theory of Dislocations and Discli-nations. Springer-Verlag, Berlin, 1983.
147. Kaku M. Quantum Field Theory: A Modern Introduction. Oxford Uni-versity Press, Oxford, 1993, p. 10.
148. Karl G., Novikov V. Photon-neutrino interactions. Journal of Experi-mental and Theoretical Physics Letters, 2005, v. 81 (6), 249–254. arXiv:hep-ph/04111746v1.
149. Kleinert H. Gauge Fields in Condensed Matter, Vol. II Stresses andDefects. World Scientific Publishing, Singapore, 1989.
150. Kleinert H. Multivalued Fields in Condensed Matter, Electromagnetism,and Gravitation. World Scientific Publishing, Singapore, 2008.

328 Bibliography
151. Kleman M., Friedel J. Disclinations, Dislocations and Continuous De-fects: A Reappraisal. arXiv: cond-mat.soft/0704.3055v1.
152. Kolsky H. Stress Waves in Solids. Dover Publications, New York, 1963.
153. Kosevich A. M. Crystal Dislocations and the Theory of Elasticity. inNabarro F. R. N., ed. Dislocations in Solids, Volume I: The Elastic The-ory. North-Holland Publishing Co., New York, 1979, pp. 33–141.
154. Kostro L. Einstein and the Ether. Apeiron, Montreal, 2000
155. Kreyszig E. Advanced Engineering Mathematics, 3rd ed. John Wileyand Sons, New York, 1972, pp. 134–146.
156. Kroner, E. Gauge Field Theories of Defects. Discussion Meeting,Max-Planck Institut fur Festkoorperforschung und Metallforschung,Stuttgart, 1982.
157. Krupka D. The Trace Decomposition Problem. Contributions to Algebraand Geometry, 1995, vol. 36 (2), 303–315.
158. Kuhn T. S. The Structure of Scientific Revolutions, 2nd enlarged ed.Methuen & Co, London, 1971.
159. Landau L. D., Lifshitz E. M., Kosevich A. M. and Pitaevskii L. P. Theoryof Elasticity, 3rd ed., revised and enlarged. Butterworth-Heinemann,Oxford, 1986, pp. 108–132.
160. Lange M. An Introduction to the Philosophy of Physics: Locality, Fields,Energy, and Mass. Blackwell Publishing, Malden, MA, 2002.
161. Lawden D. F. Tensor Calculus and Relativity. Methuen & Co, London,1971.
162. Lazar M. Twist Disclination in the Field Theory of Elastoplasticity.arXiv: cond-mat.mtrl-sci/0304519v2.
163. Lazar M., Anastassiadis C. The Gauge Theory of Dislocations: StaticSolutions of Screw and Edge Dislocations. arXiv: cond-mat.mtrl-sci/0802.0670v3.
164. Loudon R. The Quantum Theory of Light, 3rd ed. Oxford UniversityPress, Oxford, 2000.
165. Love A. E. R. A Treatise on the Mathematical Theory of Elasticity, 4th
ed. Dover Publications, New York, 1944.
166. Lucas J. R. & Hodgson P. E. Spacetime & Electromagnetism: An Essayon the Philosophy of the Special Theory of Relativity. Clarendon Press,Oxford, 1990.
167. Lukin M. D. Nonlinear Optics and Quantum Entanglement of Ultra-Slow Single Photons. arXiv: quant-ph/9910094.
168. Macken J. A. The Universe is Only Spacetime, Rev. 7.1. Self-published,Santa Rosa, CA, 2013, p. 4-24.

Bibliography 329
169. Maluf J. W., Goya A. Space-Time Defects and Teleparallelism. arXiv:gr-qc/0110107.
170. Mannheim P. D. Alternatives to Dark Matter and Dark Energy. arXiv:astro-ph/0505266v2.
171. Marklund M., Shukla P. K. Nonlinear Collective Effects in Pho-ton–Photon and Photon–Plasma Interactions. Rev. Mod. Phys., 2006,v. 78, 591–637. arXiv: hep-ph/0602123.
172. Marsden J. E. and Hughes T. J. R. Mathematical Foundations of Elas-ticity. Dover Publications, New York, (1983) 1994.
173. Maugin G. Material Inhomogeneities in Elasticity. Chapman & Hall /CRC, Boca Raton, 1993.
174. Maugin G. A. Configurational Forces: Thermomechanics, Physics,Mathematics, and Numerics. CRC Press, New York, 2011.
175. Maugin G. A. Nonlinear Waves in Elastic Crystals. Oxford UniversityPress, Oxford, 1999.
176. Mehra J. Einstein, Physics and Reality. World Scientific Publishing,Singapore, 1999.
177. Meuren S., Keitel C. H. and Di Piazza A. Nonlinear neutrino-photoninteractions inside strong laser pulses. arXiv: hep-ph/1504.02722v1.
178. Miklowitz J. The Theory of Elastic Waves and Waveguides. North-Holland Publishing, Amsterdam, 1978.
179. Millette P. A. The Heisenberg Uncertainty Principle and the Nyquist-Shannon Sampling Theorem. Progress in Physics, 2013, v. 9 (3), 9–14.arXiv: quant-ph/1108.3135.
180. Millette P. A. Elastodynamics of the Spacetime Continuum. The Abra-ham Zelmanov Journal, 2012, vol. 5, 221–277.
181. Millette P. A. On the Decomposition of the Spacetime Metric Tensorand of Tensor Fields in Strained Spacetime. Progress in Physics, 2012,vol. 8 (4), 5–8.
182. Millette P. A. The Elastodynamics of the Spacetime Continuum as aFramework for Strained Spacetime. Progress in Physics, 2013, vol. 9 (1),55–59.
183. Millette P. A. Derivation of Electromagnetism from the Elastodynamicsof the Spacetime Continuum. Progress in Physics, 2013, vol. 9 (2), 12–15.
184. Millette P. A. Strain Energy Density in the Elastodynamics of the Space-time Continuum and the Electromagnetic Field. Progress in Physics,2013, vol. 9 (2), 82–86.
185. Millette P. A. Dilatation–Distortion Decomposition of the Ricci Tensor.Progress in Physics, 2013, vol. 9 (4), 32–33.

330 Bibliography
186. Millette P. A. Wave-Particle Duality in the Elastodynamics of the Space-time Continuum (STCED). Progress in Physics, 2014, vol. 10 (4), 255–258.
187. Millette P. A. Dislocations in the Spacetime Continuum: Framework forQuantum Physics. Progress in Physics, 2015, vol. 11 (4), 287–307.
188. Millette P. A. The Burgers Spacetime Dislocation Constant b0 and theDerivation of Planck’s Constant. Progress in Physics, 2015, vol. 11 (4),313–316.
189. Millette P. A. On the Applicability of Bell’s Inequality. Progress inPhysics, 2016, vol. 12 (3), 211–215.
190. Milonni P. W. The Quantum Vacuum: An Introduction to QuantumElectrodynamics. Academic Press, San Diego, 1994.
191. Milton K A. The Casimir Effect: Physical Manifestations of Zero-PointEnergy. World Scientific Publishing, Singapore, 2001.
192. Minkowski H. Space and Time. 80th Assembly of German Natural Sci-entists and Physicians. Cologne, 21 September 1908. English translationreprinted in Lorentz H. A., Einstein A., Minkowski H, and Weyl H. ThePrinciple of Relativity: A Collection of Original Memoirs on the Specialand General Theory of Relativity. Dover Publications, New York, 1952,pp. 73–91.
193. Misner C. W., Thorne K. S., Wheeler J. A. Gravitation. W.H. Freemanand Company, San Francisco, 1973.
194. Mohr P. J. Solutions of the Maxwell Equations and Photon Wave Func-tions. Annals of Physics, 2010, v. 325, 607–663.
195. Moni Bidin C.; Carraro G.; Mendez R.A.; Smith R. Kinematical andChemical Vertical Structure of the Galactic Thick Disk. II, A Lack ofDark Matter in the Solar Neighborhood. Astrophysical Journal, 2012,v. 751, 30.
196. Morse M. M., Feshback H. Methods of Theoretical Physics, Part I. Fes-hback Publishing, Minneapolis, (1953) 1981, pp.322–323.
197. Muller-Kirsten H.W. Electrodynamics: An Introduction IncludingQuantum Effects. World Scientific Publishing, Singapore, 2004.
198. Nabarro F. R. N., ed. Dislocations in Solids, Volume I: The Elastic The-ory. North-Holland Publishing Co., New York, 1979.
199. Nabarro F. R. N., ed. Dislocations in Solids, Volume V: Disclinations.North-Holland Publishing Co., New York, 1980.
200. Nabarro F. R. N. Theory of Crystal Dislocations. Dover Publications,New York, 1987.
201. Nielsen J. T., Guffanti A. & Sarkar S. Marginal Evidence for Cos-mic Acceleration from Type Ia Supernovae. Scientific Reports, 2016,Art. no. 35596, DOI 10.1038.

Bibliography 331
202. Novozhilov V. V. Foundations of the Nonlinear Theory of Elasticity.Dover Publications, New York, (1953) 1999.
203. Ogden R. W. Non-linear Elastic Deformations. Dover Publications, NewYork, (1984) 1997.
204. Omnes R. The Interpretation of Quantum Mechanics. Princeton Uni-versity Press, Princeton, 1994.
205. Orowan E. Z. Phys., 1934, v. 89, 605, 634.
206. Padmanabhan T. Gravitation, Foundations and Frontiers. CambridgeUniversity Press, Cambridge, 2010.
207. Padmanabhan T. Quantum Field Theory: The Why, What and How.Springer, Cham, 2016.
208. Patwardhan A. V. Neutrino-photon interactions in vacuum and mate-rial media. University of California at San Diego, Paper 2013S-215C-Patwardhan-Amol, 2013.
209. Pauli W. The Connection Between Spin and Statistics. Phys. Rev., 1940,v. 58, 716–722. Reprinted in Schwinger, J., ed. Selected Papers on Quan-tum Electrodynamics. Dover Publications, New York, 1958, pp 372–378.
210. Penrose R. and Isham C. J. Quantum Concepts in Space and Time.Clarendon Press, Oxford, 1986.
211. Peskin M. E., Schroeder D. V. An Introduction to Quantum Field The-ory. Westview Press, Boulder, CO, 1995.
212. Petkov V. Relativity and the Nature of Spacetime, 2nd ed. Springer,New York, 2009, pp. 111–114.
213. Petkov V. Inertia and Gravitation: From Aristotle’s Natural Motion toGeodesic Worldlines in Curved Spacetime. Minkowski Institute Press,Montreal, 2012, pp. 78–82.
214. Planck collaboration. Planck 2013 results. I. Overview of products andscientific results. Astronomy and Astrophysics, 2014, v. 571, Table 10.
215. Polanyi M. Z. Phys., 1934, v. 89, 660.
216. Polyanin A. D. Handbook of Linear Partial Differential Equations forEngineers and Scientists. Chapman & Hall/CRC, New York, 2002.
217. Poruchikov V. B. Methods of the Classical Theory of Elastodynamics.Springer-Verlag, Berlin, 1993.
218. Powell J. L., Crasemann B. Quantum Mechanics. Addison-Wesley Pub-lishing, Reading, MA, 1961.
219. Puntigam R. A., Soleng H. H. Volterra Distortions, Spinning Strings,and Cosmic Defects. Class. Quantum Grav., 1997, v. 14, 1129–1149.arXiv: gr-qc/9604057.
220. Rabounski D. A Theory of Gravity Like Electrodynamics. Progress inPhysics, 2005, v. 1 (2), 15–29.

332 Bibliography
221. Rabounski D. Declaration of Academic Freedom (Scientific HumanRights). Progress in Physics, 2006, v. 2 (1), 57–60.
222. Rapp D. Quantum Mechanics. Holt, Rinehart and Winston, New York,1971.
223. Raymer M. G., Smith B. J. The Maxwell Wave Function of the Photon.Proc. SPIE, 2005, v. 5866, 293. arXiv: quant-ph/0604169.
224. Smith B. J., Raymer M. G. Two-Photon Wave Mechanics. Phys. Rev. A2006, v. 74 062104. arXiv: quant-ph/0605149v3.
225. Smith B. J., Raymer M. G. Photon Wave Functions, Wave-Packet Quan-tization of Light, and Coherence Theory. New Journal of Physics, 2007,v. 9, 414. arXiv: 0708.0831.
226. Reichenbach H. The Philosophy of Space & Time. Dover Publications,New York, (1927) 1957.
227. Reddy J. N. Principles of Continuum Mechanics: A Study of Conser-vation Principles with Applications. Cambridge University Press, Cam-bridge, 2010, p. 151.
228. Rousseaux G. On the interaction between a current density and a vec-tor potential: Ampere force, Helmholtz tension and Larmor torque.hal.archives-ouvertes.fr/docs/00/08/19/19/DOC/Larmor4.doc, 2006.
229. Royer D., Dieulesaint E. Elastic Waves in Solids I: Free and GuidedPropagation. Springer, Berlin, 2000.
230. Rugiero M. L., Tartaglia A. Einstein-Cartan theory as a theory of defectsin space-time. arXiv: gr-qc/0306029.
231. Sabbata V. de, Sivaram C. Spin and Torsion in Gravitation. World Sci-entific, Singapore, 1994.
232. Sadd M. H. Elasticity: Theory, Aplications, and Numerics. ElsevierButterworth-Heinemann, Burlington, MA, 2005.
233. Sakharov A. D. Vacuum Quantum Fluctuations in Curved Space andthe Theory of Gravitation. Soviet Physics–Doklady, 1968, vol. 12, 1040–1041.
234. Saunders, S. and Brown, H. R., eds. The Philosophy of Vacuum. Claren-don Press, Oxford, 2002.
235. Schrodinger E. Space-Time Structure. Cambridge University Press,Cambridge, (1950) 1985.
236. Schwinger, J., ed. Selected Papers on Quantum Electrodynamics. DoverPublications, New York, 1958.
237. Segel L. A. Mathematics Applied to Continuum Mechanics. Dover Pub-lications, New York, 1987.
238. Selleri F. Quantum Paradoxes and Physical Reality. Kluwer AcademicPublishers, Dordrecht, 1990.

Bibliography 333
239. Selleri F., ed. Wave-Particle Duality. Plenum, New York, 1992.
240. Shahverdiyev S. S. Unification of Electromagnetism and Gravitation inthe Framework of General Geometry. arXiv: gen-ph/0507034v1.
241. Sidharth B. G. The Unification of Electromagnetism and Gravita-tion in the Context of Quantized Fractal Space Time. arXiv: gen-ph/0007021v1.
242. Simmons J. A. and de Wit R., Bullough R, eds. Fundamental Aspects ofDislocation Theory, Conference Proceedings, National Bureau of Stan-dards, April 21-25, 1969. National Bureau of Standards, Special Publi-cation 317, Volume I, Washington, DC, 1970.
243. Simmons J. A. and de Wit R., Bullough R, eds. Fundamental Aspects ofDislocation Theory, Conference Proceedings, National Bureau of Stan-dards, April 21-25, 1969. National Bureau of Standards, Special Publi-cation 317, Volume II, Washington, DC, 1970.
244. Sipe J. E. Photon Wave Functions. Phys. Rev. A, 1995, v. 52, 1875–1883.
245. Sklar L. Space, Time, and Spacetime. University of California Press,Berkeley, 1977.
246. Sklar L. Philosophy and Spacetime Physics. University of CaliforniaPress, Berkeley, 1985.
247. Steeds J. W. Introduction to Anisotropic Elasticity Theory of Disloca-tions. Clarendon Press, Oxford, 1973.
248. Stone A. D. Einstein and the Quantum: The Quest of the ValiantSwabian. Princeton University Press, Princeton, 2013.
249. Stone M. The Physics of Quantum Fields. Springer-Verlag, New York,2000.
250. Straumann N. Proof of a decomposition theorem for symmetric tensorson spaces with constant curvature. arXiv: gr-qc/0805.4500v1.
251. Szabados L. B. Quasi-Local Energy-Momentum and Angular Momen-tum in GR: A Review Article. Living Rev. Relativity, 2004, v. 7, 4.
252. Talpaert Y. R. Tensor Analysis and Continuum Mechanics. Kluwer Aca-demic Publishers, Dordrecht, 2002.
253. Tartaglia A. Defects in Four-Dimensional Continua: a Paradigm for theExpansion of the Universe? arXiv: gr-qc/0808.3216.
254. Tartaglia A. A Strained Space-time to Explain the large Scale Propertiesof the Universe. International Journal of Modern Physics: ConferenceSeries, 2011, vol. 3, 303–311.
255. Tartaglia A., Radicella N., Sereno M. Lensing in an elastically strainedspace-time. Journal of Physics: Conference Series, 2011, 283 012037.
256. Taylor G. I. Proc. Roy. Soc., 1934, v. A145, 362.

334 Bibliography
257. Taylor E. F., Wheeler J. A. Spacetime Physics: Introduction to SpecialRelativity, 2nd ed. Freeman, New York, 1992.
258. Teller P. An Interpretive Introduction to Quantum Field Theory. Prince-ton University Press, Princeton, 1995.
259. Torretti R. Relativity and Geometry. Dover Publications, New York,(1984) 1996.
260. Torretti R. The Philosophy of Physics. Cambridge University Press,Cambridge, 1999.
261. Trimble V. Existence and Nature of Dark Matter in the Universe. Ann.Rev. Astron. Astrophys., 1987, v. 25, 425–472.
262. Truesdell C. Continuum Mechanics I – The Mechanical Foundations ofElasticity and Fluid Dynamics. Gordon and Breach Science Publishers,New York, 1966.
263. Truesdell C., ed. Continuum Mechanics II – The Rational Mechanics ofMaterials. Gordon and Breach Science Publishers, New York, 1965.
264. Truesdell C., ed. Continuum Mechanics III – Foundations of ElasticityTheory. Gordon and Breach Science Publishers, New York, 1965.
265. Truesdell C., ed. Continuum Mechanics IV – Problems of Non-LinearElasticity. Gordon and Breach Science Publishers, New York, 1965.
266. Truesdell C. and Noll, W. The Non-Linear Field Theories of Mechanics,3rd ed. Springer-Verlag, Berlin, 2004.
267. Unzicker A. Teleparallel Space-Time with Defects yields Geometrizationof Electrodynamics with quantized Charges. arXiv: gr-qc/9612061.
268. Unzicker A. What can Physics learn from Continuum Mechanics?.arXiv: gr-qc/0011064.
269. Volterra V. Sur l’equilibre des corps elastiques multiplement connexes.Ann. Ec. Norm. Sup., 1907, v. 24, 401–517.
270. von Neumann J. Mathematical Foundations of Quantum Mechanics.Princeton University Press, Princeton, (1932) 1996.
271. Wald R. M. General Relativity. The University of Chicago Press,Chicago, 1984.
272. Wanas M. I. and Ammar S. A. Space-Time Structure and Electromag-netism. arXiv: gr-qc/0505092v2.
273. Weertman J. and Weertman J. R. Elementary Dislocation Theory. Ox-ford University Press, Oxford, 1992.
274. Weingard R. Virtual Particles and the Interpretation of Quantum FieldTheory. in Brown H. R. and Harre R. Philosophical Foundations ofQuantum Field Theory. Clarendon Press, Oxford, 1988, pp. 43–58.
275. Weyl H. Space–Time–Matter. Dover Publications, New York, (1920)1952.

Bibliography 335
276. Weyl H. Philosophy of Mathematics and Natural Science. PrincetonUniversity Press, Princeton, (1949) 2009.
277. Whitaker A. Einstein, Bohr and the Quantum Dilemma: From Quan-tum Theory to Quantum Information, 2nd ed. Cambridge UniversityPress, Cambridge, 2006.
278. Whitham G. B. Linear and Nonlinear Waves. John Wiley & Sons, NewYork, 1999.
279. Williams L. P. The Origins of Field Theory. University Press of America,Lanham, MD, 1980.
280. Woit P. Not Even Wrong; The Failure of String Theory and the Searchfor Unity in Physical Law. Basic Books, NewYork, 2006.
281. Wolfram Mathematica Online Integrator. integrals.wolfram.com, June2015.
282. Wolfram MathWorld Polylogarithm. mathworld.wolfram.com/Polylog-arithm.html, June 2015.
283. Woodside D. A. Uniqueness theorems for classical four-vector fields inEuclidean and Minkowski spaces. Journal of Mathematical Physics,1999, vol. 40, 4911—4943.
284. Wu N. Unification of Electromagnetic Interactions and GravitationalInteractions. arXiv: hep-th/0211155v1.
285. Ziman J. M. Principles of the Theory of Solids, 2nd ed. CambridgeUniversity Press, Cambridge, 1979.
286. Zubov L. M. Nonlinear Theory of Dislocations and Disclinations in Elas-tic Bodies. Springer-Verlag, Berlin, 1997.

336 Index

Index
Aspect experiments, 193associated contorsion tensor, 139associated torsion tensor, 139
Bell’s inequality, 193, 194, 199bend-twist tensor, 140Bohmian mechanics, 196boson, 208, 209, 306
dislocation, 273Brillouin zones, 195Burgers cicuit, 103Burgers vector, 103, 137, 139
local, 104
Christoffel symbol, 139, 175circular polarization, 181compatibility conditions, 96, 139complex Hilbert space, 188conjugate variables, 195connection
antisymmetric part, 139, 175conservation laws, 207contortion tensor, 139cosmological constant, 39, 297curvature tensor, 175
dark matter, 296cosmological constant, 297Newton’s law, 296STC energy density, 298
de Brogliedouble solution, 183, 196pilot wave, 196singularity-wave
function, 185, 198deductive logic, 199defect
differential geometry, 173, 175field theory, 173gauge theory, 173
defect dynamics, 98defect interaction, 243defect interaction displace-
ment, 243defect interaction overlap, 266
curved dislocations, 270parallel dislocations, 270strain energy, 266strain energy field, 269strain energy mass, 269
defect interaction strainenergy, 281
disclination-disclination, 255W-T longitudinal, 255W-T transverse, 256
dislocation-disclination, 258E-T longitudinal, 260E-T transverse, 262E-W longitudinal, 258E-W transverse, 259S-T longitudinal, 264S-T transverse, 264
dislocation-dislocation, 254defect interaction strain
energy densitydisclination-disclination
longitudinal, 248transverse, 248
dislocation-disclination, 249E-T longitudinal, 252E-T transverse, 253E-W longitudinal, 252E-W transverse, 253
337

338 INDEX
S-T transverse, 253dislocation-dislocation
longitudinal, 246transverse, 247
defect strain tensor, 97deformation
decomposition, 29dilatation, 25, 28, 105dilatation mass relation, 35disclination, 137
deWit discrete line, 158node, 139splay, 137twist, 137, 140
deWit, 167deWit current/charge den-
sity, 171Volterra, 153
Volterra, 140wedge, 137, 140
deWit, 163deWit current/charge den-
sity, 166Volterra, 148
disclination density, 173, 174disclination line (axis), 137discontinuous change, 139dislocation, 103, 137
curved, 134Burgers displacement equa-
tion, 134Peach/Koehler stress equa-
tion, 135discrete line
deWit, 129deWit current/charge den-
sity, 133deWit strain energy densi-
ty, 132deWit strain energy: longi-
tudinal, 226
deWit strain energy: trans-verse, 231
Volterra, 126edge, 104, 140
current/charge density, 125moving, 113stationary, 111strain energy density, 117strain energy density: mov-
ing, 121strain energy density: sta-
tionary, 118line direction, 104screw, 104, 140
current/charge density, 110moving, 107stationary, 105strain energy density, 109
Volterra, 140dislocation density, 173, 174dispiration, 137distortion, 25, 28, 105
wave relation, 36distortion tensor, 95double-slit experiment, 184, 197dynamic equation, 44
edge dislocationcharge density, 215current density, 215defect strain energy, 221
longitudinal, 224longitudinal moving, 224longitudinal stationary, 224transverse, 227transverse moving, 229transverse stationary, 228
mass, 215parity odd, 215properties, 215rotation vector, 215

INDEX 339
strain energy density, 216Einstein, 103
field equations, 17spacetime physical properties,
18Einstein tensor, 176Einstein-Cartan, 103electromagnetic
charge density, 55current density, 55, 56current density 4-vector, 303field energy location, 304field strength, 53Lorenz condition, 56, 303mass, 59, 303Maxwell’s equations, 54, 59,
303photons, 304potential four-vector, 53, 56,
302Poynting four-vector, 304STC shearing potential
constant, 54STC volume force, 56waves, 303
electromagnetic field energy den-sity, 69
energy densityelectromagnetic, 181physical, 182transverse wave, 183
energy-momentum stress ten-sor, 18, 99
entangled states, 190, 286, 310EPR paradox, 193, 199equilibrium condition, 44Eshelby stress tensor, 100
fermion, 208, 209, 306disclination, 274
Feynman, 69
Feynman diagrams, 210, 281, 309field equation
scalar, 51symmetric tensor, 52vector, 52vector massless, 52
Frank vector, 137, 141function space, 188
General Relativity, 17, 29, 177and STCED, 37
graviton, 302
Heisenberg Uncertainty Principle,189, 195
helicity, 181Hooke’s law, 27
incompatibility tensor, 97, 174inherent limitations, 190, 195interference pattern, 185
kinematic relations, 43Klein-Gordon-like equation, 305
Lagrangian, 84, 92, 101, 293, 305Lagrangian density, 293Lagrangian field theory, 293lepton
splay disclination, 278, 307Levi-Civita pseudo-tensor, 176linear elastic medium, 27longitudinal electromagnetic ener-
gy flux, 70longitudinal wave displace-
ment, 184Lorenz condition, 56
magnetic torque density equation,305
mass definition, 33, 302mass renormalization, 285, 310

340 INDEX
massive bosonedge dislocation, 273, 306
measurement limitations, 190, 195metric tensor decomposi-
tion, 22, 300background part, 22dynamical part, 24
multiply-connected continuum, 96,139
neutrino pure twist disclina-tion, 279, 307
nonlocality, 190Nyquist-Shannon Sampling Theo-
rem, 195
path integral, 293photon
localization problem, 180mass, 65, 304polarization, 181screw dislocation, 273, 306wave equation, 180wavefunction, 180
photon-neutrino interac-tion, 283, 309
photon-photon interac-tion, 282, 309
physicality of four-dimensionalspacetime, 26
Planck length, 289Planck’s constant, 287Poynting
four-vector, 69vector, 69, 179
probability density, 182Proca-like equation, 305
QED interactions, 308quadratic energy relation, 303quantum electrodynamics, 210
quantum mechanicsformalism, 192hidden variables, 193logical inference, 199mathematics, 187observables, 192operators, 192
quantum nonlocality, 286, 310quantum particles
associated defects, 280quantum theory interpreta-
tion, 189quark
wedge disclination, 275, 307
rest-mass energy, 301rest-mass energy relation, 32Ricci tensor decomposition, 301Riemann curvature tensor, 176Riemann spaces, 176Riemann-Cartan spaces, 176Riemann–Silberstein vector, 180rotation tensor, 43, 53, 137rotation vector, 137
screw dislocationdefect strain energy, 221
transverse, 221transverse moving, 222transverse stationary, 221
massless, 213parity odd, 213properties, 213rotation vector, 213strain energy density, 214zero charge density, 213zero current density, 213
self-energy, 284, 310dislocation loop, 271
simply-connected continuum, 97spacetime continuum

INDEX 341
action, 292, 311constants, 289, 310
analytic form, 290recommended, 291
defect, 93disclination, 93dislocation, 93topological classification, 93Volterra classifica-
tion, 93, 94deformation, 20, 27dynamics, 302geometry, 20homogeneous, 27isotropic, 27model, 27properties, 299stress-strain relation, 29volume dilatation, 294
spacetime physical propertiesEinstein, 18electromagnetic, 19quantum physics, 19
spacetime tensor field decomposi-tion, 300
speed of light, 45, 303spin-statistics theorem, 209state space, 189state vectors, 189STC Burgers dislocation constant,
206, 287reduced, 206
STC defectsquantum particles, 306quantum physics, 305
STC quantization, 206, 305STC stress-strain relation, 300STC volume force, 73
alternative, 92defects, 97designer, 77
linear elastic, 73discussion, 77elastic force constant, 74electromagnetism, 76
quantum mechanical, 79, 81alternative, 88elastic force constant, 81upsilon proportionality con-
stant, 80strain energy density, 61, 65
dilatation, 61distortion, 61electromagnetic, 63, 70
longitudinal, 64transverse, 65
physical interpretation, 61quadratic structure, 62
strain tensor, 43strained spacetime, 18, 19, 21, 27,
300symmetry, 207
SO(3), 208SU(2), 208, 210SU(3), 208U(1), 208
symmetry principles, 207
Teleparallel, 103tensor field decomposition, 25
deviation, 25, 33dilatation, 25distortion, 25scalar, 25, 33
torsion tensor, 139, 175transverse mode of propaga-
tion, 179twist disclination
charge density, 218current density, 218defect strain energy, 221
longitudinal, 236

342 INDEX
transverse, 238mass, 218properties, 218rotation vector, 218strain energy density, 219
vector space, 187virtual particles, 210, 309volume dilatation, 32, 49, 182
wave equationdilatational, 48, 75displacement, 46, 74, 82longitudinal, 48, 75, 84longitudinal dilatation, 184Proca, 59, 88rotational, 49, 75simplified, 86spin analysis, 50strain, 50, 75, 85symmetric, 50, 75transverse, 49, 75, 85transverse distortion, 184
wave-particle duality, 30, 179, 196,301
in STCED, 182wavefunction
collapse, 185, 189, 190multi-component, 184nature, 304physical interpreta-
tion, 180, 182, 191photon, 181STCED, 183
weak field approximation, 34wedge disclination
charge density, 217current density, 217defect strain energy, 221
longitudinal, 233transverse, 235
mass, 217properties, 216rotation vector, 217strain energy density, 217
Weingarten’s theorem, 139

About the Author
Pierre A. Millette did his graduate studies on atomic physics and astrophysicsresearch of stellar atmospheres at the Department of Physics of the Universityof Ottawa under Dr. Yatendra P. Varshni (born 1932), a prominent scientistin atomic physics (the Varshni potential functions) and the physics of Quasi-Stellar Objects (the Plasma Laser Star model). In addition, Dr. Varshni isan accomplished philosopher and historian of science. Pierre Millette subse-quently worked in geophysics and in the high-technology sector in commu-nication systems, while pursuing an independent research program on theElastodynamics of the Spacetime Continuum (STCED). He has publishedmore than 15 scientific publications on atomic physics, stellar astrophysics,the foundation of quantum mechanics, general relativity and STCED. In 2013,he joined the editorial board of the American journal of physics, Progress inPhysics. He is currently continuing his scientific research work as an indepen-dent researcher.

Elastodynamics of theSpacetime ContinuumA Spacetime Physics Theory of Gravitation,Electromagnetism and Quantum Physics
by Pierre A. Millette
This book lays the foundations of a new theory of spacetime physics. STCED(Spacetime Continuum Elastodynamics) is a natural extension of Einstein’s The-ory of General Relativity. Whereas General Relativity concentrates on the curva-ture of the spacetime continuum, STCED analyses the deformations of the space-time continuum resulting in its curvature. This gives rise to an integrated theoryof gravitation and electromagnetism. At the microscopic level, STCED leads tothe analysis of defects in the spacetime continuum, which gives rise to quantumphysics. STCED is thus found to be a spacetime physics theory of gravitation, elec-tromagnetism and quantum physics. This book lays the theoretical foundations ofthe Elastodynamics of the Spacetime Continuum, allowing physicists to study andperform research in this new area of spacetime physics.
ISBN 978-1-59973-401-9American Research PressPrinted in the USA
US $36.00 / EUR €27.00
Top Related