






γλώσσες
Σελίδες
Νομικός


Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 21
ΠερίληψηΣτην εργασία αυτή περιγράφεται ένα ολοκληρωμένο σύστημα – σχε-διασμός, μεθοδολογία και λογισμικό εφαρμογής – παρακολούθησης των συγκλίσεων σε σήραγγες, το οποίο με κάποιες μικρές τροποποι-ήσεις μπορεί να αναφέρεται σε όλη τη γεωμετρία της κατασκευής. Επιχειρείται να παρουσιαστεί ένα σύνολο οδηγιών και διαδικασιών για την αξιόπιστη παρακολούθηση των σημαντικών, για την «υγεία» της κατασκευής, συγκλίσεων. Επιπροσθέτως και λόγω της εφαρ-μοσμένης ενασχόλησης σε διάφορες περιπτώσεις σηράγγων της «Εγνατίας Οδός Α.Ε.» παρουσιάζεται σε εισαγωγικό στάδιο το νέο λογισμικό πακέτο “Tunnel-Eye”. Το λογισμικό αυτό επιχειρεί να δώ-σει αξιόπιστη, αυτοματοποιημένη και φιλική στο χρήστη απάντηση στις καθημερινές ανάγκες για την παρακολούθηση της γεωμετρικής συμπεριφοράς της σήραγγας κυρίως στη φάση της κατασκευής. Σε πολλές περιπτώσεις, λόγω της ασάφειας των γεωλογικών συνθηκών, η γεωμηχανική (γεωμετρική-τοπογραφική και γεωτεχνική) γενικότε-ρα παρακολούθηση τείνει να γίνει οδηγός – περισσότερο και από τη μελέτη της σήραγγας - για όλο τον κύκλο εργασιών κατασκευής του έργου, ενός είδους έργου ιδιαίτερα υψηλού κόστους και ρίσκου.
1. ΕΙΣΑΓΩΓΗ
Το Εργαστήριο Γεωδαισίας και Γεωματικής του Τμήμα-τος Πολιτικών Μηχανικών του Α.Π.Θ. και το προσωπικό του μέσα από την πολυετή ενασχόλησή του με την παρακολού-θηση παραμορφώσεων των κατασκευών, πρανών ή κατολι-σθήσεων επιχειρεί να παρουσιάσει στην εργασία αυτή μια ολοκληρωμένη πρόταση για την παρακολούθηση της ανά διατομή ακτινικής μεταβολής της γεωμετρίας (συγκλίσεις) σηράγγων κυρίως στη φάση της κατασκευής τους. Η βασική θεώρηση της εργασίας είναι η ολοκληρωμένη αντιμετώπιση του προβλήματος, ξεκινώντας από το σχεδιασμό των Δικτύ-ων Παρακο-λούθησης και Ελέγχου και καταλήγοντας στο Λογισμικό επεξεργασίας και διαχείρισης των δεδομένων και αποτελεσμάτων. Στόχος είναι η περιγραφή μιας εφαρ-μοσμένης και πρωτότυπης (βελτιωμένης) μεθοδο-λογίας για την παραγωγή επεξεργασμένης γεωμετρικής πληροφορίας προερχόμενης από γεωδαιτικά δεδομένα, την οποία θα χρη-σιμοποιήσουν, στη συνέχεια, γεωτεχνικοί και δομοστατικοί
μηχανικοί με στόχο την αντιμετώπιση προβλημάτων «στήρι-ξης μιας σήραγγας».
Το εξαγόμενο της όλης μεθοδολογίας είναι οι ακτινικά μεταβαλλόμενες ως προς το κέντρο βάρους της κατασκευα-σμένης διατομής της σήραγγας γεωμετρικές διαφορές (από μέτρηση σε μέτρηση), οι οποίες ως γνωστόν ονομάζονται συγκλίσεις.
Για να ικανοποιηθεί ο στόχος της μεθοδολογίας που πε-ριλαμβάνει και τον όρο εφαρμοσμένη, έγινε μια προσπάθεια να έχουμε μια σχετικά «εύκολα» εφαρμόσιμη μεθοδολογία, η οποία όμως να μην περιέχει καμία έκπτωση ως προς την ακρίβεια και αξιοπιστία του αποτελέσματος (σχετική – από μέτρηση σε μέτρηση - ακρίβεια προσδιορισμού του μεγέ-θους των συγκλίσεων). Έτσι, έγιναν κάποιες παραδοχές και ελήφθησαν υπόψη κατασκευαστικές πρακτικές.
Λαμβάνοντας υπόψη την αύξηση στην κατασκευή υπογείων έργων που παρατηρείται παγκοσμίως, έχουν ανα-πτυχθεί για την κάλυψη του θέματος διάφορες τεχνικές, οι οποίες βασίζονται στις ίδιες γνωστές μεθόδους τρισδιάστα-της συνόρθωσης για μετρήσεις με GPS, δισδιάστατης για τις κλασικές μετρήσεις με γεωδαιτικό σταθμό και μονοδιά-στατης για την υψομετρία. Η διαφοροποίηση που συνήθως παρατηρείται είναι εάν στις μετρήσεις στο εσωτερικό της σήραγγας υλοποιείται κλειστή εξαρτημένη όδευση – συνορ-θούμενη ή όχι – ή χρησιμοποιείται η μέθοδος του ελεύθερου σταθμού. Η μέθοδος του ελεύθερου σταθμού (free station) καθιερώθηκε παγκοσμίως και στο πλαίσιο της μεθόδου ΝΑΤΜ (New Austrian Tunneling Method) [1] και θα πρέπει να αναφέρουμε ότι κερδίζει συνεχώς έδαφος και στα ελλη-νικά έργα. Στην παρούσα εργασία προτείνεται, επίσης, μια προσπάθεια βελτίωσης των μεθόδων παρακολούθησης συ-γκλίσεων σηράγγων μέσα από τη βελτίωση της διαδικασίας ορισμού του κάθετου επιπέδου προβολής των ανά διατομή μετρήσεων, χρησιμοποιώντας ως άξονα του έργου όχι το θεωρητικό (της μελέτης που υλοποιείται στη χάραξη), αλλά αυτόν που κάθε φορά υπολογίζεται από τα κέντρα βάρους των μετρήσεων των διατομών, όπως αυτές έχουν διαμορφω-θεί στη χρονική περίοδο των μετρήσεων. Τέλος, παρουσιά-
Σχεδιασμός, Μεθοδολογία και Λογισμικό Παρακολούθησης Συγκλίσεων Σηράγγων
με Μεθόδους Τεχνικής Γεωδαισίας
Κ. ΛΑΚΑΚΗΣ Σ. Π. ΧΑΛΙΜΟΥΡΔΑΣ Π. ΣΑΒΒΑΪΔΗΣΛέκτορας Α.Π.Θ. Υπ. Διδάκτωρ Α.Π.Θ. Καθηγητής Α.Π.Θ.
Υποβλήθηκε: 4.5.2006 Έγινε δεκτή: 5.6.2007

22 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 23
ζεται σε εισαγωγικό επίπεδο το αντίστοιχο ολοκληρωμένο πακέτο λογισμικού “Tunnel-Eye”, το οποίο έχει αναπτυχθεί από το Εργαστήριο Γεωδαισίας και Γεωματικής του Α.Π.Θ.
2. ΣΥΜΒΟΛΙΣΜΟΙ
x,y,Ho : οι συντεταγμένες του σημείου Ρ στο τοπικό σύστημα αναφοράς
δi : η οριζόντια διεύθυνση προς το ση-μείο i
θ : η σταθερά προσανατολισμού στο σημείο Ρ
ωij : η οριζόντια γωνία με κορυφή το σημείο Ρ, αριστερό σημείο i και δεξιό j
ζi : η ζενίθια γωνία από το Ρ προς το i
Si : η οριζόντια απόσταση Ρ,i
ρi : η κεκλιμένη απόσταση Ρ,i
� bi , �
bij , �
bi , �
bi : οι παρατηρήσεις των αντιστοίχων
μεγεθών
Dr : οριζόντια μετατόπιση
Dh : κατακόρυφη μετατόπιση
3. ΣΧΕΔΙΑΣΜΟΣ ΔΙΚΤΥΩΝ ΕΛΕΓΧΟΥ
Η αντιμετώπιση του προβλήματος της παρακολούθησης των συγκλίσεων στις σήραγγες αναφέρεται σε ένα τοπικό, κλειστό και ενιαίο χωρικό σύστημα που περιλαμβάνει και επιφανειακές και εσωτερικά της σήραγγας μετρήσεις.
Το όλο σύστημα θα πρέπει να αποτελείται από το Τριγω-νομετρικό Δίκτυο Ελέγχου, το Δίκτυο Ελέγχου Επιφανείας, τις στάσεις οργάνου (όδευσης ή ελεύθερου σταθμού) εντός της σήραγγας και τα σημεία ελέγχου εντός της σήραγγας (μάρτυρες) [2].
Σε όλες τις περιπτώσεις μιλούμε για τρισδιάστατο προσ-διορισμό θέσης.
1. Τριγωνομετρικό Δίκτυο Ελέγχου (ΤΔΕ)• Το ΤΔΕ εγκαθίσταται σε σταθερό κατά το δυνατό γε-
ωλογικά έδαφος και πρέπει να περιβάλει την περιοχή επίδρασης της κατασκευής της σήραγγας.
• Το μήκος κάθε βάσης δεν πρέπει να ξεπερνά τα 5 χι-λιόμετρα και η διαφορά υψομέτρου θα πρέπει να είναι μικρότερη των 150 m.
• Η υλοποίησή του γίνεται με ειδικά βάθρα διπλών σωλή-νων ύψους 1,3 - 1,5 m από το έδαφος, βάθους πάκτωσης τουλάχιστον 1,2 m και εξαναγκασμένης κέντρωσης. Με-ταξύ των δύο σωλήνων του βάθρου, οι οποίοι είναι από σκυρόδεμα, τοποθετείται μονωτικό υλικό (π.χ. υαλοβάμ-βακας) πλάτους 5-10 cm τουλάχιστον [2].
2. Δίκτυο Ελέγχου Επιφανείας (ΔΕΕ)Το ΔΕΕ εγκαθίσταται σε όλη την περιοχή επίδρασης της
κατασκευής της σήραγγας και ο σχεδιασμός του έχει κάποια συγκεκριμένα χαρακτηριστικά που είναι τα εξής: • Τα σημεία του ΔΕΕ στην περιοχή πάνω από τη σή-
ραγγα θα πρέπει να υλοποιούν διατομές τουλάχιστον 3 σημείων/κλάδο, ανά ένα χιλιόμετρο το μέγιστο. Το μεσαίο σημείο της κάθε τριάδας θα πρέπει να υλοποιεί επιφανειακά τον άξονα κάθε κλάδου της σήραγγας.
• Εφόσον κριθεί απαραίτητο, είναι δυνατό να δημιουργη-θεί πυκνότερο επιφανειακό δίκτυο πάνω από τη σήραγγα για την παρακολούθηση τοπικών καθιζήσεων.
Η υλοποίηση των σημείων του ΔΕΕ μπορεί να είναι η ίδια με αυτή του ΤΔΕ.
Γενική απαίτηση είναι δύο από τα σημεία του ΔΕΕ να εγκα-θίσταται σε περίοπτη θέση εμπρός της εισόδου και της εξόδου της σήραγγας, έχοντας οπτική επαφή με τουλάχι-στον 6-7 σημεία των ΤΔΕ και ΔΕΕ.
3. Όδευση • Στην περίπτωση που χρησιμοποιηθεί όδευση για την
υλοποίηση και τον προσδιορισμό θέσης στάσεων ορ-γάνου εσωτερικά της σήραγγας, τότε θα πρέπει κάθε κορυφή της να σημαίνεται σε απόσταση τουλάχιστον 1,5 m από τα πλάγια τοιχώματα αυτής λόγω των φαι-νομένων διάθλασης που παρατηρούνται εσωτερικά της σήραγγας.
• Οι κορυφές της όδευσης (στάσεις) θα τοποθετούνται σε εγκιβωτισμένη στο δάπεδο βάση διαστάσεων του-λάχιστον 1,5 m Χ 1,5 m με εξαναγκασμένη κέντρωση, οπότε θα μπορούσαν να αποτελούν δίκτυο ελέγχου μι-κρομετακινήσεων του εδάφους. Επίσης, μπορούν να το-ποθετούνται στα πλάγια ή άνω τοιχώματα της σήραγγας σε ειδικές μεταλλικές εγκαταστάσεις, οι οποίες έχουν τη δυνατότητα άνετης πρόσβασης και αντοχής στο βάρος (όπου χρειάζεται) τουλάχιστον του παρατηρητή.
4. Μάρτυρες Οι μάρτυρες (στόχοι - κάτοπτρα) τοποθετούνται σε δια-
τομές στο εσωτερικό της σήραγγας ανά 10 m τουλάχιστον και θα πρέπει να υπάρχουν πέντε ή περισσότεροι ανά διατο-μή. Σε κάθε διατομή η τοποθέτηση των μαρτύρων ακολου-θεί συγκεκριμένη διάταξη, η οποία είναι δύο στην περιοχή της βάσης εκατέρωθεν, ένας μάρτυρας στην κορυφή της δι-ατομής και οι υπόλοιποι δύο ενδιάμεσα. Σε περίπτωση που

22 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 23
κριθεί απαραίτητο από την εξέλιξη του φαινομένου, τότε οι μάρτυρες θα μπορούσαν να γίνουν επτά ή και περισσότεροι και να τοποθετούνται συμμετρικά και με βάση τη γεωμετρι-κή κατά μέσο παρεμβολή των ήδη εγκαταστημένων.
4. ΠΡΟΓΡΑΜΜΑ ΚΑΙ ΑΚΡΙΒΕΙΑ ΤΩΝ ΜΕΤΡΗΣΕΩΝ
Για κάθε υποσύστημα-δίκτυο μετρήσεων θα πρέπει να καταρτίζεται πρόγραμμα μετρήσεων, το οποίο ανά περίπτω-ση θα έχει τα ακόλουθα χαρακτηριστικά [3]: 1. Η απαιτούμενη ακρίβεια των αποτελεσμάτων των με-
τρήσεων, καθώς και ο ρυθμός επαναμετρήσεων είναι συνάρτηση της φύσης του γεωλογικού φαινομένου που προκαλεί τις συγκλίσεις. Απαιτείται, λοιπόν, η συνεργα-σία με τη γεωλογική-γεωτεχνική ομάδα, που παρακολου-θεί τη σήραγγα. Γενικά, πάντως, θα πρέπει να υπάρχει δυνατότητα για ακρίβεια προσδιορισμού σχετικής (ανά περίοδο μετρήσεων) μεταβολής θέσης των μαρτύρων εσωτερικά της σήραγγας καλύτερη των +/- 3 mm και στις τρεις διαστάσεις.
2. Η ανάγκη κατάρτισης προγράμματος συνεχών επανα-μετρήσεων και επιλύσεων των σημείων του ΔΕΕ είναι επιβεβλημένη. Το πρόγραμμα αυτό θα πρέπει να είναι το ίδιο με το πρόγραμμα που θα αφορά στις μετρήσεις μαρτύρων εσωτερικά της σήραγγας. Γενικά, θα πρέπει να υπάρχει δυνατότητα για ακρίβεια προσδιορισμού σχετικής (ανά περίοδο μετρήσεων) μεταβολής θέσης των σημείων του ΔΕΕ τουλάχιστον +/- 3 mm και στις τρεις διαστάσεις.
3. Το ΤΔΕ πρέπει και αυτό να επαναμετράται με βάση πρόγραμμα που θα αφορά στις γεωλογικές δυναμικές ιδιότητες των θέσεων εγκατάστασης, Επειδή, όπως έχουμε προαναφέρει, το ΤΔΕ εγκαθίσταται σε σταθερό γεωλογικά χώρο, το πρόγραμμα ελέγχου του θα είναι ενδεικτικό και η επιλογή της αλλαγής κάποιου σημείου του θα πρέπει να αποφεύγεται. Είναι, λοιπόν, ιδιαίτερα σημαντική η αρχική επιλογή του χώρου εγκατάστασης των σημείων του ΤΔΕ. Όπως αναφέρθηκε, στη συγκεκριμένη εργασία περι-
γράφεται μια σχετικά «εύκολα» εφαρμόσιμη μεθοδολογία, η οποία όμως να μην περιέχει καμία έκπτωση ως προς την ακρίβεια και την αξιοπιστία του τελικού αποτελέσματος. Θα πρέπει, λοιπόν, να διευκρινιστεί ποιο είναι αυτό το αποτέλεσμα. Το τελικό αποτέλεσμα είναι οι, ανά περίοδο μετρήσεων, διαφορές συντεταγμένων των στόχων ανά δι-ατομή εντός της σήραγγας. Η αντιμετώπιση της επίλυσης των ΤΔΕ και ΔΕΕ και της μετάδοσης των σφαλμάτων στα τελικά αποτελέσματα δεν είναι η κλασική αντιμετώπιση ελαχιστοποίησης του σφάλματος. Αυτό που προτείνεται είναι η επιλογή μιας μεθοδολογίας, η οποία θα χρησιμοποιεί σταθερά ίδια όργανα, παρατηρητές και τύπο μετρήσεων και επεξεργασίας, με στόχο την παραγωγή σταθερά του ίδιου
μεγέθους σφάλματος στις ανά χρονική περίοδο μετρήσεων συντεταγμένες των μαρτύρων εντός της σήραγγας. Προφα-νώς, αναμένεται στα τελικά αποτελέσματα, τα οποία όπως προαναφέρθηκε είναι διαφορές συντεταγμένων, το σφάλμα αυτό να απαλείφεται.
Αυτό, λοιπόν, που αναζητούμε είναι η διαχρονική ακρί-βεια των μετρήσεων. Επιδιωκόμενο είναι να αποδειχθεί ότι από περίοδο μέτρησης σε οποιαδήποτε άλλη επαναληπτική περίοδο μετρήσεων το μέγεθος του σφάλματος (μέσο τε-τραγωνικό) στις υπολογισμένες τρεις συντεταγμένες και για κάθε μάρτυρα εντός της σήραγγας παραμένει σταθερό, με διακύμανση στη σταθερότητά του +/- 3 mm.
Με βάση την εμπειρία σχετικά με τη μεθοδολογία των μετρήσεων, έτσι όπως περιγράφεται στην έκτη παράγρα-φο του παρόντος, ισχύει ότι τα σημεία των ΤΔΕ και ΔΕΕ μπορούν να υπολογίζονται με ακρίβεια +/- 2-3 mm και η διαχρονική τους διακύμανση μπορεί να είναι +/- 1-2 mm. Επομένως, προτείνεται η διερεύνηση της σταθερότητας του συστήματος από το επόμενο στάδιο της διαδικασίας που εί-ναι η μέθοδος του «ελεύθερου σταθμού» και η ταχυμετρία για τον τελικό υπολογισμό των συντεταγμένων των μαρτύ-ρων εσωτερικά της σήραγγας.
Ο νόμος μετάδοσης των σφαλμάτων στη γενική του μορφή για ένα μέγεθος S = f(l1, l2,…, ln) δίδεται από τον παρακάτω τύπο [4]:
ms = 2222
2
2
21
2
1
)...)()( nn
ml
fm
l
fm
l
f
��
����
���
(4.1)
Από την παραπάνω σχέση εξάγεται το συμπέρασμα ότι στην περίπτωση των έμμεσων ισοβαρών μετρήσεων – μπο-ρούμε ασφαλώς τέτοιες να θεωρήσουμε τις επαναλαμβανό-μενες στο χρόνο με τα ίδια χαρακτηριστικά μετρήσεις - τα μεγέθη που λαμβάνονται υπόψη για τον υπολογισμό του μέ-σου τετραγωνικού σφάλματος ενός εμμέσως υπολογιζόμε-νου μεγέθους – όπως οι τρεις συντεταγμένες των μαρτύρων εσωτερικά της σήραγγας – είναι τα άμεσα μετρημένα μεγέ-θη, η μαθηματική σχέση και το μέσο τετραγωνικό σφάλμα της κάθε μέτρησης.
Θεωρητικά, η όλη διαδικασία μπορεί να χωριστεί σε δύο ενότητες κατά τις οποίες, η πρώτη περιλαμβάνει τις μετρή-σεις που αφορούν στα δίκτυα ΤΔΕ και ΔΕΕ με τη χρήση της δορυφορικής τεχνολογίας GPS και η δεύτερη περιλαμβάνει τη διαδικασία του «ελεύθερου σταθμού» για τον προσδιο-ρισμό των συντεταγμένων των μαρτύρων ανά περίοδο με-τρήσεων, χρησιμοποιώντας ως γνωστά σημεία (με γνωστές συντεταγμένες και πίνακα μεταβλητοτήτων - συμμεταβλη-τοτήτων) τα σημεία των ΤΔΕ και ΔΕΕ, τα οποία αποτελούν τα αποτελέσματα της πρώτης ενότητας. Όπως έχει ήδη αναφερθεί, προκύπτει μέσα από την εμπειρία ότι η ακρίβεια των αποτελεσμάτων της πρώτης ενότητας μπορεί να είναι +/- 2-3 mm με διαχρονική διακύμανση +/- 1-2 mm.. Στη δεύτερη ενότητα, στην οποία περιλαμβάνεται η χρήση γεω-δαιτικού σταθμού υψηλής ακριβείας και κατάλληλοι στόχοι με εξαναγκασμένη κέντρωση, μπορεί να θεωρηθεί ασφαλής

24 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 25
ο a-priori ισχυρισμός ότι η ακρίβεια, αλλά και η διαχρονική διακύμανση της διαδικασίας δε θα προσθέσει στην τελική διακύμανση της ακρίβειας των συντεταγμένων των μαρτύ-ρων περισσότερο από 1-2 mm. Προτείνεται, λοιπόν, ο ισχυ-ρισμός ότι η όλη διαδικασία μπορεί να αξιολογηθεί a-priori με μία ακρίβεια 3-4 mm και διαχρονική διακύμανση 2-3 mm., ποσότητα η οποία, όπως έχει αναφερθεί, κυρίως ενδιαφέρει σε μια επαναλαμβανόμενη στο χρόνο διαδικασία, όπως είναι η παρακολούθηση των συγκλίσεων. Θα πρέπει, φυσικά, να σημειωθεί ότι θεωρείται σχετικά σταθερό το περιβάλλον εργασίας εντός της σήραγγας, ότι τα παρατηρούμενα με-γέθη (γωνίες και αποστάσεις) δε διαφέρουν σημαντικά ανά περίοδο μετρήσεων και ότι χρησιμοποιείται το ίδιο όργανο (βαθμονομημένο) και ο ίδιος παρατηρητής.
5. ΟΡΓΑΝΑ - ΣΗΜΑΝΣΗ
Τα όργανα μετρήσεων και η σήμανση των μαρτύρων προσδιορίζεται πάντα από τις ανάγκες ακριβείας προσδι-ορισμού θέσης και της σχετικής μεταβολής της. Συνεπώς, πρέπει τα όργανα να είναι υψηλής ακρίβειας και οι μάρτυρες (κάτοπτρα) τέτοιοι, ώστε να είναι υψηλής ακρίβειας, ανθε-κτικοί και με μόνιμη και εξαναγκασμένη κέντρωση.
Τα όργανα και οι μάρτυρες που θα χρησιμοποιηθούν θα πρέπει να ικανοποιούν τις ακόλουθες απαιτήσεις [3, 4]:1. Δέκτες GPS μιας ή δύο συχνοτήτων, τουλάχιστον οκτώ
καναλιών.2. Γεωδαιτικοί σταθμοί υψηλής ακρίβειας με γωνιακή
ακρίβεια 1’’ (δευτερολέπτου) και ακρίβεια μέτρησης απόστασης +/- (1mm +/- 2ppm) στα 3 Κm περίπου υπό κανονικές συνθήκες.
3. Μάρτυρες με κάτοπτρα διπλής όψης, υψηλής ακρίβει-ας και οπτικής διακριτότητας, των οποίων η σήμανση πρέπει να είναι μόνιμη και η κέντρωση εξαναγκασμέ-νη. Σημαντικό, επίσης, είναι να είναι ανθεκτικοί στις δύσκολες καταστάσεις εσωτερικά της σήραγγας, όπως π.χ. ανθεκτικοί σε χτυπήματα από διερχόμενα οχήματα ή προσωπικό.
6. ΜΕΘΟΔΟΙ ΜΕΤΡΗΣΕΩΝ ΚΑΙ ΥΠΟΛΟΓΙΣΜΩΝ
Οι βασικές μεθοδολογίες προσδιορισμού συντεταγμένων είναι οι κλασικές, με τη σημαντική διαφορά στον προσδιο-ρισμό των συντεταγμένων σημείων στάσης εσωτερικά της σήραγγας, οι οποίες πρέπει και αυτές να είναι αποτέλεσμα συνόρθωσης.
Η μεθοδολογία επίλυσης των δικτύων ΤΔΕ και ΔΕΕ που προτείνεται προβλέπει καταρχήν την τρισδιάστατη συνόρ-θωση ως ελεύθερου δικτύου συνολικά των σημείων των δύο δικτύων και τη χρήση τοπικού συστήματος αναφοράς παρα-
γόμενου από τις μετασχηματισμένες ΕΓΣΑ87 συντεταγμέ-νες σε WGS84 στις δύο διαστάσεις (x,y) και χρήση στη τρί-τη διάσταση z του γεωμετρικού υψομέτρου h προερχόμενου από το χωροσταθμικό δίκτυο της ΓΥΣ H0 και τον τύπο H0 = h – N (6.1). Αυτό γίνεται, διότι το GPS μετρά γεωμετρικά υψόμετρα και θα επιτευχθεί χρησιμοποιώντας τουλάχιστον ένα τριγωνομετρικό σημείο της ΓΥΣ στο πλαίσιο του σχε-διασμού του ΤΔΕ. Η επίλυση αυτή θα χρησιμοποιηθεί ως μηδενική μέτρηση, ενώ για οποιαδήποτε σειρά μετρήσεων k προτείνεται να επαναλαμβάνεται η ίδια διαδικασία και τα αποτελέσματα να μετασχηματίζονται με μετασχηματισμό ομοιότητας στο αρχικό σύστημα αναφοράς της μηδενικής μέτρησης. Ως τελικά αποτελέσματα των συνορθώσεων μπο-ρούν να χρησιμοποιούνται οι συντεταγμένες x, y σε ΕΓΣΑ 87, αφού επαναμετασχηματιστούν από WGS84 και στη δι-άσταση z το H0 ΓΥΣ, με βάση τον τύπο (6.1). Παράγουμε, λοιπόν, αποτελέσματα της ίδιας ακρίβειας με τα εισερχό-μενα στην επεξεργασία δεδομένα που όρισαν καταρχήν το τοπικό σύστημα συντεταγμένων. Έτσι, έχουμε ένα κλειστό σύστημα, το οποίο με βάση εκτεταμένη πρακτική εμπειρία μπορεί να επιτύχει ακρίβεια στις τρεις συντεταγμένες x, y και Ho, +/- 2-3 mm. και διακύμανση 1-2 mm.
6.1 Μέθοδος αναφορικά με το Τριγωνομετρικό Δίκτυο Ελέγχου και το Δίκτυο Ελέγχου Επιφανείας
Κλασική τρισδιάστατη συνόρθωση ελεύθερου τριγωνο-μετρικού δικτύου. Συνήθως, χρησιμοποιείται και προτείνεται εδώ η τεχνολογία των δορυφορικών συστημάτων προσδιορι-σμού θέσης, όπως το GPS και η τεχνική του Στατικού Δια-φορικού Προσδιορισμού Θέσης (static DGPS). Η παραμονή του κάθε δέκτη σε κάθε σημείο πρέπει να είναι τουλάχιστον 60 λεπτών με περίοδο μέτρησης ανά 15 δευτερόλεπτα.
6.2 Μέθοδοι αναφορικά με τα σημεία στάσης εσωτερικά της σήραγγας
Οι επικρατέστερες μέθοδοι για τον προσδιορισμό της τρισδιάστατης θέσης των σημείων στάσης του οργάνου (γεωδαιτικός σταθμός) εσωτερικά της σήραγγας είναι η μέθοδος της κλειστής εξαρτημένης και προσανατολισμένης όδευσης και η μέθοδος του ελεύθερου σταθμού που προτεί-νεται στην παρούσα εργασία.
6.2.1 Μέθοδος Ελεύθερου Σταθμού
Η μέθοδος αυτή βασίζεται στη γνωστή μέθοδο της Πολλαπλής Οπισθοτομίας και έχει τα παρακάτω χαρακτη-ριστικά:

24 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 25
• Το άγνωστο σημείο είναι η στάση του οργάνου εσωτερι-κά της σήραγγας και τα γνωστά είναι κάθε φορά οι ήδη προσδιορισμένοι στις τρεις διαστάσεις μάρτυρες. Εξαί-ρεση αποτελεί η μέτρηση εισόδου στη σήραγγα, όπου ως οπισθοτομικά (γνωστά) σημεία χρησιμοποιούνται τα σημεία των ΔΕΕ και ΤΔΕ.
• Κάθε σειρά μετρήσεων ξεκινά έξω από τη σήραγγα και με βάση τα σημεία των ΤΔΕ και ΔΕΕ. Επαναπροσδιορί-ζονται οι συντεταγμένες των μαρτύρων που έχουν ήδη σημανθεί και έτσι προχωρούμε στις επόμενες διατομές. Σε περιπτώσεις που βρισκόμαστε στη φάση της κατα-σκευής της σήραγγας και τμήμα της έχει ισορροπήσει και δεν παρατηρούνται μικρομετακινήσεις μπορούμε (με επιφύλαξη) να ξεκινούμε τις μετρήσεις από τις διατομές που θεωρούνται σταθερές. Σκόπιμο είναι και στις περι-πτώσεις αυτές, ανά διαστήματα να ελέγχουμε το «σταθε-ρό» τμήμα με μετρήσεις που θα ξεκινούν από τα σημεία ΔΕΕ και ΤΔΕ.
• Πρέπει να περιλαμβάνει τρισδιάστατη συνόρθωση με βάση τις εξισώσεις παρατηρήσεων – όπως περιγράφεται στο επόμενο κεφάλαιο και γι’ αυτό είναι απαραίτητη η σκόπευση σε 6-7 τουλάχιστον γνωστά σημεία, εφόσον μιλούμε για τρισδιάστατο προσδιορισμό θέσης.
7. ΣΥΝΟΡΘΩΣΗ ΠΟΛΛΑΠΛΗΣ ΤΡΙΣΔΙΑΣΤΑΤΗΣ ΟΠΙΣΘΟΤΟΜΙΑΣ
Το πρόβλημα της πολλαπλής οπισθοτομίας διατυπώνεται ως εξής: από ένα σημείο P (το οπισθοτομικό σημείο) έγιναν παρατηρήσεις (διευθύνσεων, οριζοντίων γωνιών, ζενίθιων γωνιών ή και πλευρών) προς m σημεία με γνωστές συντε-ταγμένες (όπου m>3). Ζητούνται οι συντεταγμένες (x,y,z) του σημείου P.
Επειδή οι παρατηρήσεις είναι πάντοτε περισσότερες από τον αριθμό των αγνώστων (τις συντεταγμένες x,y,z του σημείου P και τη σταθερά προσανατολισμού θ της σειράς διευθύνσεων, αν μετρήθηκαν διευθύνσεις) θα λύσουμε το παραπάνω πρόβλημα με την εφαρμογή της μεθόδου των ελαχίστων τετραγώνων και ειδικότερα, με τη μέθοδο των εξισώσεων παρατηρήσεων [5],[6]. Οι μορφές παρατήρησης που μπορούν να γίνουν από το οπισθοτομικό σημείο P προς τα γνωστά σημεία, συνδέονται με τις συντεταγμένες x, y, z με τη βοήθεια των σχέσεων:
� i =arctanyy
xx
i
i
�
� - � (7.1)
� ij =arctanyy
xx
j
j
�
� - arctan
yy
xx
i
i
�
� (7.2)
S i = � � � �22 yyxx ii ��� (7.3)
� i = � � � � � �222 zzyyxx iii ����� (7.4)
� i =arctan� � � �
zz
yyxx
i
ii
���� 22
(7.5)
όπου δi , Si , ρi και ζi είναι η διεύθυνση, η οριζόντια απόστα-ση, η κεκλιμένη απόσταση και η ζενίθια γωνία αντιστοίχως από το σημείο Ρ προς το σημείο Ρi και ωij είναι η γωνία με κορυφή το σημείο Ρ και ανάμεσα στο αριστερό σημείο Ρi και στο δεξιό σημείο Ρj.
Η εξίσωση παρατήρησης, για την παρατήρηση yk, έχει τη μορφή :
b k =a k1 *�x + a k2 *�y + a k3 *�y � �� + v k (7.6)
αν η παρατήρηση είναι διεύθυνση, ή αλλιώς:
b k =a k1 *�x + a k2 *�y + a k3 *�y + v k (7.7)
όπου δx = x – x0, δy = y – y0 είναι οι διορθώσεις των προ-σεγγιστικών συντεταγμένων, δθ = θ – θ0 είναι η διόρθωση της προσεγγιστικής σταθεράς προσανατολισμού, vk είναι το σφάλμα της παρατήρησης και η ανηγμένη παρατήρηση bk, καθώς και οι συντελεστές a1k, a2k, a3k για κάθε μορφή παρατήρησης είναι:1. Παρατήρηση διεύθυνσης
b k = � bi - (arctan 0
0
yy
xx
i
i
��
- � 0 ) (7.8)
a k1 = - 20
0
)( i
i
S
yy � (7.9)
a k2 =20
0
)( i
i
S
xx � (7.10)
2. Παρατήρηση οριζόντιας γωνίας
b k = � bij - (arctan 0
0
yy
xx
j
j
�
� - arctan 0
0
yy
xx
i
i
��
) (7.11)
a k1 =20
0
)( i
i
S
yy � -
20
0
)( j
j
S
yy � (7.12)
a k2 =20
0
)( j
j
S
xx � -
20
0
)( i
i
S
xx � (7.13)
3. Παρατήρηση ζενίθειας γωνίας
b k = � bi - arctan
� � � �zz
yyxx
i
ii
����
2020
(7.14)
a k1 = - 020
00
*)(
)(*)(
i
ii
S
zzxx
����
(7.15)
a k2 = - 020
00
*)(
)(*)(
i
ii
S
zzyy
����
(7.16)

26 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 27
a k3 = 20
0
)( ��iS
(7.17)
4. Παρατήρηση κεκλιμένης απόστασης
b k = � bi - � � � � � �202020 zzyyxx iii ����� (7.18)
a k1 = -0
0
��xxi � (7.19)
a k2 = -0
0
��yyi � (7.20)
a k3 = -0
0
��zzi � (7.21)
Το σύστημα των κανονικών εξισώσεων 002, αναλυτικά γράφεται:
�����
�
�
�����
�
�
�����
�
�
�
NNNN
NNNN
NNNN
NNNN
zyx
zzzyzxz
yyzyyxy
xxzxyxx
�������
�
�
�������
�
�
�
�
�
�
��
�
�
�
z
y
x
=
�������
�
�
�������
�
�
�
�
�
�
�u
zu
yu
xu
(7.22)
Όπου η άγνωστη διόρθωση 003 εμφανίζεται μόνο στην περί-πτωση που γίνουν παρατηρήσεις διευθύνσεων
� xx =��
n
k k12
21ka�
, � xy =��
n
k k122k1kaa
� , � xz =�
�
n
k k123k1kaa
�
� yy =��
n
k k12
22ka�
, � yz =��
n
k k123k2kaa
� , � zz =�
�
n
k k12
23ka�
N �x = -��
n
k k12
1ka�
, N �y = -��
n
k k12
2ka�
, N �x = -��
n
k k12
3ka�
,
N �x =��
n
k k12
1�
u x =��
n
k k12
k1kba�
, u y =��
n
k k12
k2kba�
, u z =��
n
k k12
k3kba�
,
u � = -��
n
k k12
kb�
d είναι ο αριθμός των διευθύνσεων που παρατηρήθηκαν και σkείναι το μέσο τετραγωνικό σφάλμα της παρατήρησης yk.
8. ΚΕΝΤΡΟ ΒΑΡΟΥΣ ΔΙΑΤΟΜΩΝ
Τα γεωτεχνικά και δομοστατικά μέτρα αντιμετώπισης προβλημάτων «στήριξης» μιας σήραγγας στη φάση κατα-
σκευής της και με βάση τη μέθοδο NATM (New Austrian Tunneling Method) αντιμετωπίζονται ανά κατασκευασμένη διατομή. Είναι βασικό να αναφέρουμε ότι οι ποσότητες που χρησιμοποιούνται στην πράξη ως μεγέθη που περιγράφουν το φαινόμενο των συγκλίσεων στους επιστήμονες που θα μελετήσουν τα μέτρα αντιμετώπισης είναι οι προβολές της τρισδιάστατης σύγκλισης – που είναι οι διαχρονικές διαφο-ρές των συντεταγμένων των μαρτύρων - στο κάθετο επίπεδο της διατομής της κατασκευασμένης σήραγγας. Σημαντικό λοιπόν στοιχείο σε ό,τι αφορά στον ακριβή προσδιορισμό των προβολών των συγκλίσεων είναι να ορίζεται με την καλύτερη δυνατή ακρίβεια το κάθετο επίπεδο προβολής στη συγκεκριμένη Χ.Θ. της ήδη ως εκεί κατασκευασμένης σήραγγας.
Χαρακτηριστικό αυτού του συστήματος προβολής είναι ότι θα πρέπει να ορίζεται ως κάθετο επίπεδο επί του άξονα της υφιστάμενης σήραγγας και με σημείο αναφοράς (0,0) επί αυτού.
Στην εργασία αυτή και κατά συνέπεια στο λογισμικό πακέτο “Tunnel-Eye” επιχειρείται μια βελτιωμένη προσέγ-γιση αυτού του ζητήματος. Για τον ορισμό του συστήματος αναφοράς ανά διατομή δε λαμβάνεται υπόψη ο θεωρητικός άξονας της σήραγγας (άξονας της μελέτης), αλλά με βάση τα στοιχεία δύο μετρημένων διαδοχικών διατομών υπολογίζο-νται τα αντίστοιχα κέντρα βάρη τους, από τα οποία προκύ-πτει ο άξονας της σήραγγας (πραγματικός). Είναι προφανές ότι με αυτό τον τρόπο προκύπτει σαν άξονας μια τεθλασμέ-νη γραμμή (από διατομή σε διατομή).
Αναλυτικά, η διαδικασία που ακολουθείται για την εύρε-ση των οριζόντιων και των κατακόρυφων μετακινήσεων ανά διατομή είναι η εξής:
Λαμβάνοντας υπόψη την i μέτρηση των σημείων παρα-κολούθησης (συνήθως πέντε) μιας διατομής Α, υπολογίζο-νται οι συντεταγμένες του κέντρου βάρους της (ΚΒ_Αi). Ομοίως, προσδιορίζονται και οι συνταγμένες του κέντρου βάρους (ΚΒ_Βi) της αμέσως επόμενης μετρηθείσας διατο-μής Β καθώς και των υπολοίπων διατομών (Γ, Δ κλπ).
Από τις συντεταγμένες των δύο διαδοχικών σημείων (π.χ. ΚΒ_Αi, ΚΒ_Βi) υπολογίζεται το αζιμούθιο (Az_Αi) του πραγματικού άξονα της σήραγγας της πλευράς ΑΒ. Το ίδιο γίνεται και για τις επόμενες διατομές προσδιορίζοντας πάντα το κάθε αζιμούθιο της κάθε πλευράς του άξονα με βάση την επόμενη διατομή.
Τα αζιμούθια αυτά επανυπολογίζονται σε κάθε σειρά μετρήσεων. Έτσι, για κάθε πλευρά του άξονα της σήραγγας έχουμε τόσα αζιμούθια, όσες και οι σειρές των μετρήσεων.
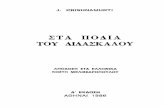
Με βάση τα παραπάνω ορίζεται το τοπικό δισδιάστατο σύστημα της διατομής που εξετάζουμε ως κάθετο στην αρχή της πλευράς του άξονα. Η οριζόντια μετατόπιση Dr καθενός σημείου παρακολούθησης (σχ.1) θα δίνεται από τον τύπο:
Dr = Dx i * cos(Az) – Dy i * sin(Az) (8.1)
Όπου Dxi και Dyi είναι οι διαφορές των συντεταγμένων x, y αντίστοιχα μεταξύ της i σειράς μετρήσεων και της μηδε-
(7.23)

26 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 27
νικής μέτρησης, όποια και αν θεωρούμε ότι είναι αυτή. Επί-σης, Az είναι το αζιμούθιο του τμήματος εκείνου του άξονα της σήραγγας που έχει υπολογισθεί από τις συντεταγμένες της μηδενικής μέτρησης.
Η κατακόρυφη μετατόπιση Dh στο σύστημα της διατο-μής (σχ.1) θα δίνεται ως η απλή διαφορά των συντεταγμέ-νων z στις δύο περιόδους μέτρησης.
Αν και φαίνεται παράδοξο γεωδαιτικά, δεχόμαστε να έχουμε ανά σειρά μετρήσεων διαφορετικό αζιμούθιο του άξονα της κατασκευασμένης σήραγγας και επομένως δια-φορετικό κάθετο επίπεδο προβολής των συγκλίσεων. Αυτό συμβαίνει γιατί είναι σαφές ότι οι συγκλίσεις είναι ακτινικό μέγεθος με διεύθυνση κάθετη ως προς τον άξονα κατασκευ-ής και εφαπτόμενο στο επίπεδο της διατομής, ακόμη και αν αυτό αλλάζει ανά σειρά μετρήσεων, διότι ως τέτοιες θα αντι-μετωπιστούν. Φυσικά, θα μπορούσαμε να συμπληρώσουμε ότι ανάγοντας (μετασχηματισμός ομοιότητας) κάθε φορά το νέο επίπεδο προβολής στο μηδενικό θα μπορούσαμε να εξάγουμε και άλλου είδους παραμόρφωση της σήραγγας, η οποία όμως δεν είναι σύγκλιση, είναι προβαλλόμενη στο επί-πεδο τρισδιάστατη ολική παραμόρφωση. Με απλά λόγια, οι συγκλίσεις που προκύπτουν προέρχονται από τις διαφορές των προβαλλόμενων στο επίπεδο της διατομής συντεταγμέ-νων των στόχων της κάθε διατομής, αδιαφορώντας για την καταμήκος του άξονα μετακίνηση, διότι αυτό δεν ονομάζε-ται σύγκλιση.
Dh (-)
Dr (+)
Dr (+) ������ � �� � �� � � ��� �� � ��
Dh (-) �� � � ����� � � �� � � ��� �� � ��
1
2
3
4 5
Σχ. 1. Τυπική διατομή σήραγγας
9. ΛΟΓΙΣΜΙΚΟ
9.1 Εισαγωγή
Το λογισμικό πακέτο “Tunnel-Eye” λειτουργεί σε πε-ριβάλλον Windows. Το πρόγραμμα έχει τη δυνατότητα συνόρθωσης οριζοντιογραφικών τοπογραφικών δικτύων (x,y), κατακορύφων δικτύων (z) καθώς και συνόρθωσης δικτύων ταυτόχρονα και στις τρεις διαστάσεις (x,y,z) (τρισ-διάστατα δίκτυα) [5, 7]. Επίσης, επίλυσης του προβλήματος του Free Station, όπως αυτό αναλύθηκε παραπάνω, δηλαδή υπάρχει η δυνατότητα επίλυσης τρισδιάστατης πολλαπλής οπισθοτομίας (συνόρθωση) και επίλυσης της ταχυμετρικής
αποτύπωσης, διαχρονική σύγκριση των αποτελεσμάτων (συντεταγμένες σημείων διατομών) και γραφικές παραστά-σεις των διαφορών των συντεταγμένων.
Ένα σημαντικό μέρος του πακέτου καλύπτει η δυνατό-τητα της γραφικής απεικόνισης όλων των αποτελεσμάτων, ώστε αυτά να είναι άμεσα κατανοητά από το χρήστη [8].
Επίσης, παρέχει τη δυνατότητα παραγωγής αρχείων τα-χυμετρικών σημείων σε μορφή DXF, ώστε να επιτυγχάνεται η περαιτέρω σχεδίαση με τη βοήθεια οποιουδήποτε γνωστού προγράμματος CAD.
Το “Tunnel-Eye” είναι μία ολοκληρωμένη εφαρμογή με διαχείριση αρχείων, εκτέλεση υπολογισμών, χρήση γραφι-κών και φιλική επικοινωνία με το χρήστη.
9.2 Περιγραφή του προγράμματος
Η κύρια φόρμα του προγράμματος φαίνεται παρακάτω (σχ. 2), μέσα από την οποία ο χρήστης μπορεί να επιλέξει το πρόβλημα που θέλει να επιλύσει ή την υπολογιστική διαδι-κασία που θέλει να εκτελέσει.
Σχ. 2. Η κύρια φόρμα εισόδου στο πρόγραμμα
Η επιλογή γίνεται με το mouse από το αντίστοιχο εικο-νίδιο. Με την ολοκλήρωση της επιλογής ενεργοποιείται το κατάλληλο υποπρόγραμμα και ανοίγουν κατά περίπτωση οι φόρμες εισαγωγής στοιχείων. Τα στοιχεία που δίδονται μπορούν να πληκτρολογηθούν ή και να εισαχθούν από κάποιο αρχείο που ήδη υπάρχει. Η επιλογή των ονομάτων των αρχείων γίνεται από τις γνωστές και κοινές για τα προ-γράμματα σε περιβάλλον Windows φόρμες επιλογής drive, directory και αρχείου. Μετά την εισαγωγή των απαραίτητων δεδομένων εκτελούνται οι αντίστοιχοι υπολογισμοί και σε νέο παράθυρο σημειώνονται τα αποτελέσματα τόσο σε ανα-λυτική μορφή, όσο και με τη σχεδίαση γραφικού που δείχνει άμεσα τη γεωμετρία της λύσης στο χρήστη. Στη συνέχεια, υπάρχει δυνατότητα εκτύπωσης των αποτελεσμάτων ή/και της αποθήκευσης αυτών σε αρχείο με την εισαγωγή του path και του επιθυμητού ονόματος.

28 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 29
9.3 Παραδείγματα Εφαρμογών
9.3.1 Επίλυση Free Station
Ακολουθώντας την επιλογή «ΕΠΙΛΥΣΗ FREE STA-TION» μεταφερόμαστε στη φόρμα του υποπρογράμματος FREE STATION που φαίνεται παρακάτω (σχ. 3).
Σχ 3. Επίλυση Οπισθοτομίας
Στην πρώτη καρτέλα με όνομα «ΔΕΔΟΜΕΝΑ ΟΠΙΣΘΟ-ΤΟΜΙΑΣ» γίνεται η επίλυση τρισδιάστατης πολλαπλής οπισθοτομίας λαμβάνοντας ως δεδομένα τις συντεταγμένες των γνωστών σημείων και τις μετρήσεις προς αυτά, δηλαδή τις οριζόντιες διευθύνσεις, τις αποστάσεις στο χώρο και τις ζενίθιες γωνίες. Τα στοιχεία που ζητούνται μπορούν να πληκτρολογηθούν και, μετά το πέρας της εισαγωγής τους, να γίνει αποθήκευση αυτών σε αρχείο ή και να εισαχθούν από κάποιο αρχείο που ήδη υπάρχει. Στη συνέχεια, μέσα από τη δεύτερη καρτέλα «ΔΕΔΟΜΕΝΑ ΤΑΧΥΜΕΤΡΙΑΣ» εισάγουμε τα απαραίτητα στοιχεία για την επίλυση της τα-χυμετρίας και τον προσδιορισμό των συντεταγμένων των σημείων των διατομών (σχ. 4).
Σχ. 4 Επίλυση ταχυμετρίας
Μετά την εισαγωγή των απαραίτητων δεδομένων εκτε-λούνται οι αντίστοιχοι υπολογισμοί και σε νέο παράθυρο σημειώνονται τα αποτελέσματα τόσο σε αναλυτική μορφή, όσο και με τη σχεδίαση γραφικού που δείχνει άμεσα τη γεω-μετρία της λύσης στο χρήστη.
Από την επιλογή «ΓΡΑΦΙΚΑ» του βασικού μενού μεταφε-ρόμαστε στη φόρμα του σχήματος 5. Εδώ υπάρχει η δυνατό-τητα σύγκρισης μετρήσεων της ίδιας διατομής σε διαφορετι-κές χρονικές στιγμές. Δημιουργείται ένα αρχείο ανά διατομή. Ο χρήστης έχει τη δυνατότητα να επιλέξει ποιο σετ συντε-ταγμένων θα είναι η «μηδενική μέτρηση», δηλαδή η διατομή αναφοράς και ποιο σετ θα είναι εκείνο που θα συγκριθεί με αυτήν. Μέσα από τα αντίστοιχα πλήκτρα επιλογών σχεδιάζε-ται η κάθε διατομή χωριστά ή μαζί με τη διατομή σύγκρισης, εμφανίζεται ο πίνακας των διαφορών των συντεταγμένων του κάθε σημείου Dx, Dy, Dz, υπολογίζεται και σχεδιάζεται το κέντρο βάρους της κάθε διατομής και, τέλος, σχεδιάζονται οι γραφικές παραστάσεις διαφορών με το χρόνο.
Σχ.5 Γραφική παράσταση αποτελεσμάτων.
9.3.2 Επίλυση Δικτύων
Ακολουθώντας την επιλογή «ΕΠΙΛΥΣΗ ΔΙΚΤΥΩΝ» μεταφερόμαστε στη φόρμα του υποπρογράμματος NETS που φαίνεται παρακάτω (σχ.6), μέσα από την οποία είναι δυνατή η επίλυση οριζοντιογραφικών και χωροσταθμικών τοπογραφικών δικτύων .
Σχ.6 Επίλυση Δικτύων

28 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 29
10. ΣΥΜΠΕΡΑΣΜΑΤΑ - ΠΡΟΤΑΣΕΙΣ
Τα σημαντικότερα συμπεράσματα - προτάσεις που προκύπτουν μέσα από την εργασία αυτή, η οποία κυρίως αναφέρεται σε σήραγγες υπό κατασκευή, μπορούν να συνο-ψισθούν στα παρακάτω:• Γίνεται μια ολοκληρωμένη αντιμετώπιση του προβλή-
ματος παρακολούθησης των συγκλίσεων των σηράγγων, ξεκινώντας από το σχεδιασμό των Δικτύων Παρακολού-θησης και καταλήγοντας στο Λογισμικό πακέτο “Tunnel-Eye”. Το λογισμικό πακέτο μας δίνει τη δυνατότητα επίλυσης όλων των προβλημάτων που προκύπτουν κατά την παρακολούθηση της σήραγγας (συνόρθωση δικτύων και επίλυση της μεθόδου Free Station). Επίσης, είναι δυ-νατή η άμεση επίλυση και εμφάνιση των αποτελεσμάτων που επιθυμεί ο χρήστης, η οποία είναι πολύ χρήσιμη σε άλλες ειδικότητες εμπλεκομένων για την εξαγωγή ασφα-λών συμπερασμάτων.
• Για την πλέον αξιόπιστη διαχρονική μελέτη των συ-γκλίσεων στις διατομές μιας σήραγγας προτείνεται η χρήση του άξονα που προκύπτει κεντροβαρικά από τις μετρήσεις των κατασκευασμένων (έως εκεί και όπως) δι-ατομών αυτής. Με βάση την εμπειρία που υπάρχει στην κατασκευή των σηράγγων, κυρίως συγκοινωνιακών έργων, μπορούμε να πούμε ότι συνήθως δεν χρησιμοποι-είται ο άξονας αυτός ως βασικό στοιχείο του επιπέδου προβολής των μετρηθέντων συγκλίσεων, με αποτέλεσμα σημαντικά ή λιγότερο σημαντικά σφάλματα στα μέτρα αντιμετώπισης για τη στήριξη της σήραγγας, ή κάποιων διατομών της.
• Προτείνεται η συστηματική αντιμετώπιση της ολοκλη-
ρωμένης διαδικασίας τρισδιάστατου προσδιορισμού της θέσης μαρτύρων εσωτερικά της σήραγγας και μάλιστα ως κλειστό σύστημα. Κατά τη διαδικασία αυτή δεν επικεντρώνουμε το ενδιαφέρον μας στο να έχουμε ένα σύστημα βέλτιστο (ελαχιστοποίηση σφαλμάτων), αλλά σταθερό (σταθερό σφάλμα σε κάθε περίοδο μετρήσεων), χρησιμοποιώντας μεθοδολογίες πιο απλές στην πρακτι-κή τους εφαρμογή. Συνεπώς, αυτό το οποίο τελικά εξε-τάζεται είναι το εύρος της χρονικής διακύμανσης (μέχρι +/- 3 mm) της σταθερότητας του συστήματος.
ΒΙΒΛΙΟΓΡΑΦΙΑ
1. Κοντογιάννη Βάια: Η γεωδαιτική μέθοδος ελέγχου (“Monitoring”) παραμορφώσεων σηράγγων. Τεκμηρίωση της μεθόδου και ανάλυση παρατηρήσεων, Διδακτορική διατριβή. Πανεπιστήμιο Πατρών – Τμήμα Πολιτικών Μηχανικών, Πάτρα 2005.
2. Μπαντέλας Α., Σαββαΐδης Π.: Παρακολούθηση παραμορφώσεων τεχνικών έργων και κατολισθήσεις εδαφών με γεωδαιτικές μεθόδους, Εκδόσεις Γ&Κ Παπαγεωργίου Ο.Ε., Θεσσαλονίκη, 1990.
3. Λακάκης Κ.: Τεχνική περιγραφή σηράγγων – Γεωδαιτική παρακολούθηση, Εγνατία Οδός Α.Ε., Θεσσαλονίκη, 2003.
4. Μπαντέλας Α., Σαββαΐδης Π., Υφαντής Ι., Δούκας Ι.: Γεωδαισία τόμος Ι: Γεωδαιτικά όργανα και μέθοδοι μέτρησης και υπολογισμών, Εκδόσεις Αφοί Κυριακίδη, Θεσσαλονίκη, 1999.
5. Ρωσσικόπουλος Δ.: Τοπογραφικά δίκτυα και υπολογισμοί, Εκδόσεις Ζήτη, Θεσσαλονίκη, 1992.
6. Δερμάνης Α., Ρωσσικόπουλος Δ., Φωτίου Α.: Τοπογραφικοί υπολογισμοί και συνορθώσεις δικτύων, Εκδόσεις Ζήτη, Θεσσαλονίκη, 1993.
7. Βλάχος Δ. : Τοπογραφία - Τόμος Γ’, Θεσσαλονίκη, 1987.8. Sippel K. : Modern monitoring system software development,
Proceedings, 10th FIG Symposium on Deformation Measurements, California, 2001.
Κ. ΛακάκηςΛέκτορας, Εργαστήριο Γεωδαισίας και Γεωματικής, Τμήμα Πολιτικών Μηχανικών Α.Π.Θ., Πανεπιστημιούπολη 54124 Τ.Θ.Π. 465 ΘεσσαλονίκηΣ. Π. ΧαλιμούρδαςΥποψήφιος Διδάκτωρ, Εργαστήριο Γεωδαισίας και Γεωματικής, Τμήμα Πολιτικών Μηχανικών Α.Π.Θ., Πανεπιστημιούπολη 54124 Τ.Θ.Π. 465 ΘεσσαλονίκηΠ. Σαββαΐδης Καθηγητής, Εργαστήριο Γεωδαισίας και Γεωματικής, Τμήμα Πολιτικών Μηχανικών Α.Π.Θ., Πανεπιστημιούπολη 54124 Τ.Θ.Π. 465 Θεσσαλονίκη

30 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 31
AbstractThe present study aims to describe a complete system – planning, methodology and software development – for monitoring the geom-etry of tunnels. It also includes a presentation of instructions and procedures for the reliable monitoring of geometric displacements of a tunnel, with emphasis on the tunnel convergence, that are very important for the “health” of the tunnel construction. In addition, the software application program “Tunnel-Eye” is presented. This software attempts to present a reliable, automated and user-friendly answer to everyday needs for monitoring of tunnel geometry dur-ing construction. In many cases, the geometrical and geotechnical monitoring of tunnels tends to become a significant factor affecting the whole construction procedure, which is a type of project with high cost and risk.
1. INTRODUCTION
Based on long experience of the deformation monitor-ing of constructions and/or landslides, the members of the Laboratory of Geodesy and Geomatics of the Department of Civil Engineering, A.U.Th., attempt in this study to present an integrated approach for the monitoring of alterations in the geometry of tunnels, primarily during their construction stage. The key object of this study is an integrated approach to the problem, starting from the planning of the geodetic control networks and ending with the development of soft-ware for the processing and managing of data and results. In addition, this study contributes to the improvement of already known methods of monitoring the convergence of tunnels. This is achieved by improving the reliability of the projection plane for every cross-section measurement by using not the theoretical axis of the tunnel, but the one measured each time and computed as the connection of the weighted average centers of each cross-section. There fol-lows an analytical description of the method, and the rel-evant software package, named “Tunnel-Eye”, is presented
at the end of this study. This software was developed in the Laboratory of Geodesy and Geomatics of the Department of Civil Engineering, A.U.TH.
2. PLANNING THE CONTROL NETWORK
The approach to the problem of monitoring the conver-gences involves a unified monitoring scheme that includes measurements both outside and inside the tunnel.
The whole scheme could be divided into different net-work types, such as the Reference Control Network (RCN), the Surface Control Network (SCN), the Traverse Stations and the Monitoring Points inside the tunnel.
In all these three cases, three-dimensional (3D) position-ing is accomplished.
3. TIMEPLAN AND ACCURACY OF MEASUREMENTS
A timeplan for measurements should be established, in-volving different control network types, which must satisfy the following criteria: 1. The required accuracy of the measurement results and
the program of re-measurements must be linked to the type of geological phenomenon that causes the conver-gences.
2. The need to establish a timeplan of continuous re-mea-surement and computation of the deformation of SCN points is mandatory.
3. The RCN must also be re-measured using a program that involves the geologically dynamic attributes of the bed-ding area of RCN points.
Extended summary
Planning, Methodology and Software for Geometrical Monitoring of Tunnels with
Surveying Engineering Methods
K. LAKAKIS S. P. CHALIMOURDAS P. SAVVAIDISLecturer, A.U.TH. Ph.D. Candidate, A.U.TH. Professor, A.U.TH.
Submitted: Apr. 4. 2006 Accepted: June 5. 2007

30 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 31
4. GEODETIC INSTRUMENTS FOR MONITORING OF DEFORMATION
Geodetic instruments and surveying marks for control points always derive from the need for accuracy in the de-termination of position and in its changes. As a result, instru-ments must be of high accuracy, resistant, with permanent and forced centering devices.
5. MEASUREMENTS AND PROCESSING METHODS
The principal methodologies for the determination of coordinates of control points in the tunnel also include ad-justment procedures.
A method to be used with the Reference & Surface Con-trol Networks (RCN & SCN) points is the 3D Free network adjustment.
The most widely used methods for the determination of the three-dimensional position of points inside the tunnel are: the method of using least-square adjusted closed tra-verses and the method of free stationing using a high preci-sion Total Station instrument. The method that has been used in the Tunnel-Eye software is “free-stationing”.
5.1 “Free stationing” method
This is based on the already-known method of multiple resections and must meet the following criteria:• Each time, the unknown point is the position of the Total
Station inside the tunnel and the known points are the 3D determined reflectors at the cross-section, already mea-sured in a previous survey.
• Each measurement period should ideally start from the area outside the tunnel, based on the RCN and SCN. The coordinates of the reflectors that have already been marked are re-determined.
• It must include three-dimensional adjustment of observa-tions, and for that reason it is necessary to aim and mea-sure at least 7 known points, with a three-dimensional determination of position.
6. ADJUSTMENT OF 3D RESECTIONS
The problem of the multiple resections is formulated as follows: from point P (the unknown resection point) observations (directions, horizontal and vertical angles, and distances) towards m points with known coordinates (where
m>3) are made. The coordinates (x, y, z) of point P must be computed.
Provided that the number of observations is always great-er than the number of the unknowns, the above mentioned problem can be solved by using least squares adjustment of observations.
7. THE WEIGHTED-AVERAGE CENTRE
An important issue for the monitoring of tunnel conver-gences is the projection plane on which the 3D coordinates of the reflectors at cross-sections will be projected for every tunnel section. The current procedure uses for this purpose the plane vertical to the theoretical (from the tunnel design) axis, as staked out during the construction.
In this paper we suggest a dynamic procedure for the determination of the construction axis – which also means of its vertical layer – which is based on the weighted-average centres of the constructed cross-sections of the tunnel. This method can improve the accuracy of the computed conver-gences as a result of the more accurate projection layer.
8. SOFTWARE PACKAGE
8.1 Introduction
The software application program Tunnel-Eye runs under Win32 based operating systems. The software pack-age has been developed in order to design, optimize and adjust horizontal and vertical networks (2D and 3D geodetic networks) in order to resolve the Free-station problem, as well as performing deformation analysis of the behavior of control points and graphic presentations.
The program is supplied with a modern, object-oriented, graphical user-interface. With the results of observations tak-en in two epochs, a deformation analysis can be calculated, to determine the displacements of individual points.
It is also able to generate files that include the coordinates of points in DXF format, so that the design may be manipu-lated with the aid of any standard CAD program.
Tunnel-Eye is a unified application that provides file processing, performs calculations, and uses graphics allow-ing friendly communication with the user.
8.2 Description of the program
Through the main form, the user can choose the prob-lem to be solved or the computational procedure to be per-formed.

32 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 Τεχν. Χρον. Επιστ. Έκδ. ΤΕΕ, Ι, τεύχ. 3 2007 Tech. Chron. Sci. J. TCG, I, No 3 33
The choice is made by clicking with the mouse on the relevant icon. When the choice is made, the appropriate subprogram is activated and the corresponding forms are opened. The data that must be filled in may either be given through the keyboard or be imported from an already cre-ated file. The choice of file name uses the standard Windows environment, allowing the selection of drive, directory and
file. After the import of the necessary data, the correspond-ing calculations are performed and in a new window the results appear in both an analytical and a graphical way that indicates to the user the geometry of the solution. After that, and in certain applications, there is the possibility of printing the results or/and saving them in a new file by entering path and name.
K. Lakakis, Lecturer, School of Civil Engineering A.U.TH., Aristotle University of Thessaloniki, 541 24 ThessalonikiP. S. Chalimourdas, Ph.D. Candidate, School of Civil Engineering A.U.TH., Aristotle University of Thessaloniki, 541 24 ThessalonikiP. Savvaidis, Professor, School of Civil Engineering A.U.TH., Aristotle University of Thessaloniki, 541 24 Thessaloniki
Top Related