![ENSC380 Lecture 28 Objectives: z-TransformUnilateral z-Transform • Analogous to unilateral Laplace transform, the unilateral z-transform is defined as: X(z) = X∞ n=0 x[n]z−n](https://static.fdocument.org/doc/165x107/61274ac3cd707f40c43ddb9a/ensc380-lecture-28-objectives-z-unilateral-z-transform-a-analogous-to-unilateral.jpg)
Z ω Set X denotes t +++ = ()
36
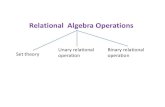
P2 FA10 - Derive EOM for simple mechanical system L San Andres (c) 2010 For the system shown in the figure, Z (t) =Z o cos(ω t) is a periodic displacement input (known). Perform the following tasks: a) Set X(t) as the coordinate for the block motion; X=0 denotes the unstretched length of spring 1. Draw a free body diagram and derive the block equation of motion. You should get: ( ) 1 2 () 2 () t t MX CX K K X KZ + + + = (Must demonstrate how you derive the equation) b) For K 1 =250 N/m, K 2 =400 N/m, M=50 gram and C=0.75 N.s/m, find the system natural frequency (Hz) and damping ratio ( ζ). c) For Z o =15 mm, ω=20 Hz, determine the periodic forced response of the block X (t), i.e., calculate the amplitude of motion and the phase lag relative to Z(t). Please explain where operation is above or below or around the natural frequency; most importantly, is operation safe? d) BONUS: Determine the excitation frequency range where the amplitude of motion |X max |=30 mm is not exceeded. X K2 C K1 Z(t)=Zo cos(ωt) X K2 C K1 Z(t)=Zo cos(ωt) M K2 C K1 Z(t)=Zo cos(ωt) M 0.05 kg ⋅ := K 1 250 N m ⋅ := C 0.75 Ns ⋅ m ⋅ := K 2 400 N m ⋅ := Dashpot force: FD =C dX/dt Spring 1 force: FS1 =K1 X For FBD diagram, assume a state of motion such that Z > X > 0 Spring 2 force: FS2 =K2 (Z-X) Normal from wall = weight N=W M Dashpot force: FD =C dX/dt Spring 1 force: FS1 =K1 X For FBD diagram, assume a state of motion such that Z > X > 0 Spring 2 force: FS2 =K2 (Z-X) Normal from wall = weight N=W (a.1) FBD and forces X=0 means unstretched position of spring 1 (1) (a.2) derive EOM (2) From the FBD diagram, Newton's 2nd law states: M 2 t X d d 2 ⋅ F S2 F S1 − F D − = where N W = F Damper C t x d d ⋅ = (3) is the dashpot force wall reaction force F S1 KX ⋅ = (4) Elastic forces from springs 1 and 2. Spring 2 drives motion of block. F S2 K 2 Z X − ( ) ⋅ = Substitute Eqs. (3,4) into Eq. (2) to get where Zt () Z o cos ω t ⋅ ( ) ⋅ = (5) M 2 t X d d 2 ⋅ C t X d d ⋅ + K eq X ⋅ + K 2 Zt () ⋅ = and K eq K 1 K 2 + :=
Transcript of Z ω Set X denotes t +++ = ()

P2 FA10 - Derive EOM for simple mechanical system L San Andres (c) 2010
For the system shown in the figure, Z(t)=Zo cos(ω t) is a periodic displacement input (known). Perform the following tasks: a) Set X(t) as the coordinate for the block motion; X=0 denotes the unstretched length of spring 1. Draw a free body diagram and derive the
block equation of motion. You should get: ( )1 2 ( ) 2 ( )t tM X C X K K X K Z+ + + = (Must demonstrate how you derive the equation)
b) For K1=250 N/m, K2=400 N/m, M=50 gram and C=0.75 N.s/m, find the system natural frequency (Hz) and damping ratio (ζ). c) For Zo=15 mm, ω=20 Hz, determine the periodic forced response of the block X(t), i.e., calculate the amplitude of motion and the phase lag
relative to Z(t). Please explain where operation is above or below or around the natural frequency; most importantly, is operation safe? d) BONUS: Determine the excitation frequency range where the amplitude of motion |Xmax|=30 mm is not exceeded.
X
MK2
C
K1
Z(t)=Zo cos(ωt)
X
MK2
C
K1
Z(t)=Zo cos(ωt)MK2
C
K1
Z(t)=Zo cos(ωt)
M 0.05 kg⋅:= K1 250Nm⋅:=
C 0.75N s⋅m
⋅:= K2 400Nm⋅:=
M
Dashpot force:
FD =C dX/dt
Spring 1 force:
FS1 =K1 X
For FBD diagram, assume a state of motion such that Z > X > 0
Spring 2 force:
FS2 =K2 (Z-X)
Normal from wall = weight
N=W
M
Dashpot force:
FD =C dX/dt
Spring 1 force:
FS1 =K1 X
For FBD diagram, assume a state of motion such that Z > X > 0
Spring 2 force:
FS2 =K2 (Z-X)
Normal from wall = weight
N=W
(a.1) FBD and forces
X=0 means unstretched positionof spring 1
(1)
(a.2) derive EOM(2)From the FBD diagram,
Newton's 2nd law states:M
2tXd
d
2⋅ FS2 FS1− FD−=
where N W=FDamper Ctxd
d⋅= (3) is the dashpot force wall reaction force
FS1 K X⋅= (4) Elastic forces from springs 1 and 2. Spring 2 drives motion of block.FS2 K2 Z X−( )⋅=
Substitute Eqs. (3,4) into Eq. (2) to get where
Z t( ) Zo cos ω t⋅( )⋅=(5)M
2tXd
d
2⋅ C
tXd
d⋅+ Keq X⋅+ K2 Z t( )⋅= and
Keq K1 K2+:=

(b) Calculate natural frequency (fn) and viscous damping ratio (ζ):
ωnKeqM
⎛⎜⎝
⎞⎟⎠
.5
:=ωn 114.018
1sec⋅=
fnωn2 π⋅
:=fn 18.146 Hz⋅=
ζC
2 Keq M⋅( ) .5⋅:= (6)
ζ 0.066=(c) Calculate response for Zo 0.015 m⋅:= f 20 Hz⋅:=
ω f 2⋅ π⋅:=Z t( ) Zo cos ω t⋅( )⋅:=
The system response will be X t( ) Xop cos ω t⋅ φ+( )⋅:= (7)Where Xop and φ are theamplitude and phase lag of themotion X(t) operation just
abovenatural frequency
Find frequency ratio rω
ωn:=
r 1.102=Using FRF formula:
Find Amplification factor A r( ) 1
1 r2−( )22 ζ⋅ r⋅( )2+⎡
⎣⎤⎦
.5:=
A r( ) 3.86=Find Amplitude at steady-state
note here that Fo=K2 Zo XopZo K2⋅
KeqA r( )⋅:=
Xop 0.036 m⋅=Find phase lag
φ atan2− ζ⋅ r⋅
1 r2−
⎛⎜⎝
⎞⎟⎠
π−:= since r>1XopZo
2.375= large amplitude ratio -NOT very safe
φ 2.548−= rad
φ180π
⋅ 145.97−= degrees
(d) Frequency range for max amplitude Let Xmax 30 mm⋅:=from
Xop ZoK2Keq⋅ A r( )⋅:= Let δ
XmaxZo
KeqK2
⋅:=
then δ2 A r( )2= 1
1 r2−( )22 ζ⋅ r⋅( )2+⎡
⎣⎤⎦
= δ 3.25=

expanding:
δ2 1 2 s⋅− s2+( ) 2 ζ⋅( )2 s⋅+⎡⎣ ⎤⎦⋅ 1= where s r2=
collecting like terms δ2 s2⋅ 4 ζ
2⋅ 2 δ2⋅−( ) s⋅+ δ
2 1−( )+ 0=
and identifying this polinomial with a s2⋅ b s⋅+ c+ 0=
a δ2:= b 4 ζ
2⋅ 2 δ2⋅−( ):= c δ
2 1−( ):=solve for the two roots
s1b− b2 4 a⋅ c⋅−( ) .5−
2 a⋅:= s1 0.694=
s2b− b2 4 a⋅ c⋅−( ) .5+
2 a⋅:= s2 1.304=
hence, the two frequencies below and above which the amplitude ratio will be lessthan Xmax are:
f1 s10.5 fn⋅:= f2 s2
0.5 fn⋅:=
fn 18.146 Hz⋅= f1 15.119 Hz⋅= f2 20.724 Hz⋅=
For comparison purposes, lets plot the function
Xop r_( ) ZoK2Keq⋅
1
1 r_2−( )22 ζ⋅ r_⋅( )2+⎡
⎣⎤⎦
.5⋅:=
0 5 10 15 20 25 30 35 400
0.02
0.04
0.06
XmaxXop
freqfn
⎛⎜⎝
⎞⎟⎠
f2f1
freq

C 1.961 103× Nsm⋅=ω 7 2⋅ π⋅
rads
⋅:=frequency of forcing function:
a) Natural frequency and damping ratio:
ζC
2 K M⋅( ).5⋅:=ωn
KM⎛⎜⎝
⎞⎟⎠
.5:= ωn 19.649
rads
= fnωn2 π⋅
:=fn 3.127Hz=
ζ 0.05=static deflection: Ys
FoK
:= Ys 0.455 in=
compare to response ifM=C=0 (low frequency)b) for harmonic excitation: F t( ) Fo cos ω t⋅( )⋅:=
The machine periodic response is Y t( ) Yop cos ω t⋅ φ+( )⋅= YS t( )FoK
cos ω t⋅( )⋅:=
Yop Ys H r( )⋅=
MEEN 363 - SP09 - Exam 2 - Problem 1 (Periodic Forced Response)
A machine weighing W=2200 lb is known to cause unacceptable vibrations in nearby equipment. The engineering modification consists of mounting the machine on four vibration isolators, as shown schematically in the figure. Upon installation, the static deflection of each isolator is 1 inch. Each isolator has a viscous damping coefficient equal to C=2.8 lb.s/in. There is a periodic load excitation acting on the machine, i.e. F=Fo cos(ωt), where Fo=1000 lb and frequency f=(ω/2π)=7 Hz, determine a) System natural frequency (fn [Hz]) and damping ratio (ξ). [10] b) Amplitude [inch] and phase lag [degrees] of system motion Y(t) at the excitation frequency (f=7 Hz). [10] c) Sketch the response Y(t) versus time, label physical dimensions in graph. [5] d) The amplitude of motion if (for some unfortunate reason) a periodic force with a frequency equal to the system natural frequency, i.e. F=Fo
sin(ωnt), is exerted on the machine. [5]
C
Y(t)
F(t)
M
IsolationMount
(2 other on back) not shown
K
EOM with Y origin from SEP:
M2tYd
d
2⋅ K Y⋅+ C
tYd
d⋅+ Fo cos ω t⋅( )⋅=
known parameters
M 2200 lb⋅:=g 386.089
in
s2=
Ci 2.8 lbf⋅sin⋅:=
static deflection:δ 1 in⋅:= Ki
M g⋅4 δ⋅
:= Ki 550lbfin
= isolator stiffnessEach isolator supports 1/4 the machine weight.
Total stiffness: K 4 Ki⋅:= C 4 Ci⋅:=K 3.853 105×
Nm
=Force magnitude: Fo 1000 lbf⋅:=

Y t( ) Yop cos ω t⋅ φ r( )+( )⋅:= T2 π⋅
ω:=
for two periods of motion
0 0.14 0.290.5
0.25
0
0.25
0.5System response vs. time
time (s)
Y(t)
[in]
period
T 0.143s=
Note the response at t=0 shows a negative displacement. This is since the phase angle is close to -180 degrees.
Broken-line shows curve of F(t)/K
r 1:=(d) for excitation at the natural frequency: H r( ) 9.997=Yopn Ys H r( )⋅:=Ys
2 ζ⋅4.544 in= Yopn 4.544 in= Phase lag is -π/2 rads (-90 degrees)
(e) Isolators are effective at frequency of operation (r>1.44), where Yop Ys<
0 0.5 1 1.5 2 2.5 30
50
100
150
frequency ratio r=w/wn
Am
plitu
de (m
m)
Find frequency ratio rω
ωn:=
Operation above natural frequencyr 2.238=
The amplification factor and phase angle are:
H r( )1
1 r2−( )22 ζ⋅ r⋅( )2+⎡⎣ ⎤⎦
.5:=
φ r( ) atan2− ζ⋅ r⋅
1 r2−
⎛⎜⎝
⎞⎟⎠
π−:= since r >1
H r( ) 0.249= φ r( ) 3.086−= φ r( )180
π⋅ 176.804−= degrees
Yop Ys H r( )⋅:= Yop 0.113 in= << Ys Ys 0.455 in=
(c) graph of periodic response

Natural frequency increases and damping ratio decreases respect to original system
K 2 Korig⋅:=(b) If the stiffness is doubled:
degreesΨ r ζ,( ) 180π
⋅ 180− 166.191−=phase lag:Yop_original 0.032 in=amplitude:Yop_originalFo
KH r ζ,( )⋅:=
since r>1operation above natural frequencyr 1.5=rffn
:=(a) ORIGINAL system
rω
ωn=withΨ r ζ,( ) atan
2− ζ⋅ r⋅
1 r2−
⎛⎜⎝
⎞⎟⎠
:=
amplitude increases 3.25 times, because operation is too close toresonance. Furthermore, damping ratio is smaller than original.
Yop_b
Yop_original3.25=
since r ~ 1degreesΨ r ζ,( ) 180
π⋅ 180− 129.135−=phase lag:Yop_b 0.103 in=amplitude:Yop_b
Fo
KH r ζ,( )⋅:=
>1r 1.061=r
ω
ωn:=
ζ 0.072=ωn 88.858radsec
=ζ
C2 M⋅ ωn⋅
:=ωnKM
⎛⎜⎝
⎞⎟⎠
.5:=
NEW:
ω f 2⋅ π⋅:=f 15 Hz⋅:=ωn 62.832
radsec
=ωn fn 2⋅ π⋅:=
Analyze excitation atW M g⋅:=C 4 lbf⋅
secin
⋅:=M 120 lb⋅:=KEY:
frequency of operation between 4-20 HzFo 50 lbf⋅:=fn 10 Hz⋅:=F t( ) Fo sin ω t⋅( )⋅=DATA:
The figure shows a simple mechanical system (K-C-M) excited by a harmonic force F(t)=Fo sin(ωt), Fo=50 lbf. The frequency of the external force excitation ranges from 4 Hz to 20 Hz. Tests show the natural frequency is fn (10 Hz) and the viscous damping coefficient (C) equals 4 lbf.s/in. The mass of the system is M=120 lb. a) Determine the system steady-state amplitude of motion (in inch) and phase lag (in degrees) for excitation at
15 Hz. [10] b) Repeat (a) with stiffness equal to twice the original value. By how much the amplitude of motion is
reduced or amplified? [6] c) Repeat (a) with a mass equal to twice the original value. By how much the amplitude of motion is reduced
or amplified? [6] d) Based on the results (a-c) what system configuration will you select? Are there other options? Explain. [3]
K C
F(t)
M
MEEN 363 FALL 06 EXAM 2 PROBLEM 2
H r ζ,( ) 1
1 r2−( )2 2 ζ⋅ r⋅( )2+⎡⎣
⎤⎦
.5:=
H is the amplification factor and Ψ the phase angle defined as a function of the frequency ratio (r=ω/ωn):
is the static displacement, δsFo
K=whereY t( ) δs H⋅ sin ω t⋅ Ψ+( )⋅=The system periodic response is
Basic Knowledge as stated on Summary of formulas:
for later useζorig ζ:=ζ 0.102=
ζC
2 M⋅ ωn⋅:=
Morig M:=K 1.227 103
×lbfin
=Korig K:=Let:K ωn
2M⋅:=
First determine the ORIGINAL system stiffness (K) and damping ratio (ζ):

very little reduction. Why? already operating above natural frequency. Damping does little to reduce vibration amplitude!
Yop_original 0.032 in=compared to:Yop 0.029 in=
ffn
1.5=r=YopFo
KorigH
ffn
2 ζorig⋅,⎛⎜⎝
⎞⎟⎠
⋅:=
f 15 Hz=ζorig 0.102=
fn 10 Hz=
(d) Select case (c), i.e. double mass since it shows the lowest amplitude of response. The system effectively works as an isolator. Doubling the stiffness is certainly NOT a good choice since natural frequency is too close to excitation frequency.
Another option? Keep original system and DOUBLE damping? Not really, see below:
Amplitude decreases to 0.37 times, because operation is well above natural frequency.
Yop_c
Yop_original0.367=
nearly - 180 deg, since r >> 1
degreesΨ r ζ,( ) 180π
⋅ 180− 177.487−=phase lag:Yop_c 0.012 in=amplitude:Yop_cFo
KH r ζ,( )⋅:=
>1r 2.121=r
ω
ωn:=ζ 0.036=
ωn 44.429radsec
=ωnKM
⎛⎜⎝
⎞⎟⎠
.5:=
ζC
2 M⋅ ωn⋅:=
NEW:
Natural frequency decreases and damping ratio decreases respect to original system
M 2 Morig⋅:=K Korig:=(c) If the mass is doubled:

the magnitude of acceleration is AFoKe
ω2
1 r2−( )22 ζ⋅ r⋅( )2
+⎡⎣
⎤⎦
.5⋅= A
FoMe
r2
1 r2−( )22 ζ⋅ r⋅( )2
+⎡⎣
⎤⎦
.5⋅=
hence, define Amax 10 g⋅:= maximum allowed acceleration of filament
HZ 2 π⋅1s⋅:=Me 150 lb⋅:=system mass
fn 12 HZ⋅:= natural frequency
f 11.5 HZ⋅:= excitation frequency due to wind buffets
Let roffn
:= ro 0.958= close to natural frequency
The maximum force allowedequals
Fmax r ζ,( ) Amax Me⋅1 r2−( )2
2 ζ⋅ r⋅( )2+
⎡⎣
⎤⎦
.5
r2⋅:=
P2. Periodic forced response of a SDOF mechanical system. DESIGN COMPONENT
The signal lights for a rail may be modeled as a 176 lb mass mounted 3 m above the ground of an elastic post. The natural frequency of the system is measured to be 12.2 Hz. Wind buffet generates a horizontal harmonic force at 12 Hz. The light filaments will break if their peak accelerations exceed 15g. Determine the maximum acceptable force amplitude |F| when the damping ratio ζ=0.0 and 0.01.
Full grade requires you to explain the solution procedure with due attention to physical details
3 m
F
The excitation force is periodic, say F(t)=Fo sin(ωt). then the system response will also be periodic, Y(t), with samefrequency as excitation. Assuming steady state conditions:
STEADY RESPONSE of M-K-C system to PERIODIC Force with frequency ω
Case: periodic force of constant magnitude Define operating frequency ratio: rω
ωn=
F t( ) Fo sin ω t⋅( )⋅=
System periodic response: Y t( ) δs H r( )⋅ sin ω t⋅ Ψ+( )⋅= (1)
where:
H r( )1
1 r2−( )22 ζ⋅ r⋅( )2
+⎡⎣
⎤⎦
.5=δs
FoKe
= tan Ψ( ) 2− ζ⋅ r⋅
1 r2−=
care with angle, range: 0 to -180deg
From (1), the acceleration is a t( ) ω2
− Y t( )⋅= A sin ω t Ψ+ 180−( )(⋅=
or

c) Posts are usually hollow for the cables to be routed. These posts have layers of elastomeric material (~rubber-like) inside to increase their structural damping. Modern posts are wound up frocomposites that integrate damping layers. Clearly, adding a "true" dashpot is not cost-effective
Fmax ro ξ,( )Fmax ro 0,( ) 2.553=
b) a system with damping ξ=0.1 will produce a 255 % increase in allowable forceHence, the rail lightsystem will be more reliable, lasting longer.
which gives a very good estimation of the maximum wind force allowed
Amax Me⋅ 2⋅ ξ⋅ 300 lbf=SInce ro~1, a simpler enginering formula gives
GRAPH NOT FOR EXAM
12 ξ⋅
5=
fn 75.3981s
=
50 100 150 2000
6.5
13
with dampingwithout damping
frequency (rad/s)
Am
plitu
de o
f acc
/g
Amaxg
f fn
A r ζ,( )FoMe
r2
1 r2−( )22 ζ⋅ r⋅( )2
+⎡⎣
⎤⎦
.5⋅:=
Fo Fmax ro ξ,( ):=
For the force found the amplitude of acceleration is
Fmax ro ξ,( )Fmax ro 0,( ) 2.553=
Fmax ro ξ,( ) 340.231 lbf=ξ 0.1:=with damping
Note the importance of damping that leads to a substantial increase in force allowed
Fmax ro 0,( ) 133.27 lbf=without any damping

fn 1.056 103 Hz
n 6.633 103
rads
fnn
2
nKe
M
0.5
natural frequency A 1 10 6 m
F t( ) A Ka cos t =thenXd A cos t =for periodic motionswhere Ke Ka Ks
M 2tXd
d
2 Ke X Cs
tXd
d Ka Xd= F t( )=
The Equation of motion for the system is
M 2tXd
d
2 FD Fs Fa W=
Apply Newtons law
Define coordinate systems with origin at static equilibrium position.
Upon assembly, the arm support spring holds the weight of the R/W head.
Note that in actuality, the air film stiffness is zero when the disk does not spin.
(a) Draw FBD, derive EOM, find n
KEY:
XM
Assume X >Xd
FD= Cs dX/dt FS= Ks X - W
WFa= Ka (X – Xd)
XM
Assume X >Xd
FD= Cs dX/dt FS= Ks X - W
WFa= Ka (X – Xd)
: TBDM 0.025 kg
DATA: KsKa
10Ka 106 N
m
The figure displays a schematic view of a read/write head in a hard disk. The support arm holding the R/W head is represented by structural stiffness Ks=105N/m, and damping coefficient Cs [Ns/m] to be determined. The R/W head mass equals 25 gram. Ka=106N/m represents the stiffness of the air film between the rotating disk and the R/W head. When the disk spins, micro-asperities in the disk induce a wavy-like motion represented as Xd=A cos(ωt), where A= 1 micro-meter. The frequency (f=ω/2π ) of the excitation varies from 500 Hz to 4000 Hz, depending on the rotational speed of the disk and the radial position of the R/W head support structure. The origin of the coordinate systems, X=Xd=0, represents the static equilibrium position. a) Draw a free body diagram, derive the equation of motion for the
R/W head system, and calculate the system natural frequency (Hz) [5, 5, 5]
b) State a formula for the motion X(t), i.e. amplitude and phase angle as function of frequency [5] c) When ω=ωn, find the magnitude of the damping coefficient Cs such that the amplitude of motion for the R/W hear does not exceed 2
micro-meter. [5] d) Sketch the amplitude and phase for the frequency response of the R/W head. Your graphs must show physical dimensions and
explanatory sentences explaining relevant information related to the system motion [2 x 5]
KsCs
M
Hard disk rotating drum
Ka Xd =A cos(t)
Read/writehead
Support arm
Hard disk
R/W headmechanism
X
KsCs
M
Hard disk rotating drum
Ka Xd =A cos(t)
Read/writehead
Support arm
Hard disk
R/W headmechanism
KsCs
M
Hard disk rotating drum
Ka Xd =A cos(t)
Read/writehead
Support arm
Hard disk
R/W headmechanism
X
MEEN 363/617 Example Base motion - Frequeny response

Define ratio XAmax
2.2
2 1
1 r2 2 2 r 2
=and from equation for amplification factor H:
for operation at the natural frequency r=1
12
= Hence
12
0.227
Cs 2 Ke M 0.5 Value of damping coefficient
Cs 75.378 Nsm
Functions for graphs
(d) FRF graphs (amplitude and phase) of R/W head versus frequency range of interest
0 1000 2000 3000 40000
1.5 10 6
3 10 6 FRF
frequency (Hz)
Am
plitu
de o
f res
pons
e (m
)
0 1000 2000 3000 4000
180
120
60
0
FRF
frequency (Hz)
Phas
e of
resp
onse
(deg
rees
)
(b) Establish system periodic responseThe system periodic response is: (from cheat sheet)
X t( ) H sin t = XA sin t = XA H r( )=
where A Ka
Ke is the "static" displacement 9.091 10 7
m
H is the amplification factor and is the phase angle defined as a function of the frequency ratio (r=/n):
H r( )1
1 r2 2 2 r 2
.5=
tan 2 r
1 r2= with r
n=
(c) Calculate damping coefficient needed for amplitude of motion NOT to exceed 2 microns
XAmax 2 10 6 m

Note that at low frequencies, amplitude equals 9.091 10 7 m and phase lag is 0 degrees
at high frequencies, amplitude approaches null values and phase lag approaches 180 degrees
at the natural frequency, amplitude of motion is XAmax 2 10 6 m
NOT for exam:
Relative motion is of importance, i.e. Y=X-Xd
Y X AYA Y
Y 180
arg Y
0 1000 2000 3000 40000
1.5 10 6
3 10 6 FRF
frequency (Hz)
Am
plitu
de o
f res
pons
e (m
)
0 1000 2000 3000 4000
180
120
60
0
FRF
frequency (Hz)
Phas
e of
resp
onse
(deg
rees
)
Y n 0 9.091 10 8 m
A 9.091 10 8 m
Phase angle cannot be positive

Ψ r( ) atan2− ζ⋅ r⋅
1 r2−
:=Yop r( ) aMrotor
M⋅
r2
1 r2−( )22 ζ⋅ r⋅( )2
+
.5⋅:=
a 2.5 10 3−⋅ in⋅:=The system response (amplitude and phase) for imbalance excitationare:
r 0.884=r ω
ωn:=ω 188.496
rads
=ω RPM
2 π⋅60
⋅rads
⋅:=
RPM 1800:=and operating frequency ratio (r) for rotor speed:
little dampingζ 0.011=ωn 213.125rads
=
ζC
2 M⋅ ωn⋅:=ωn
KM
.5:=
calculate the system natural frequency and damping ratio:M 8.5 103
× lb=
C 100 lbf⋅secin
⋅:=M Mrotor Mplatform+:=
Mplatform 7750 lb⋅:=Mrotor 750 lb⋅:=K 106 lbfin
⋅:=Given
System excitation due to rotating imbalanceKEY:
c
����������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������
�������������������������������������������������������������������������������������������
rotor
platform
a
k����������������������������������������������������������������������������������������������������������
The rotor of an electric generator weights 750 lb and is attached to a platform weighing 7750 lb. The motor has an imbalance eccentricity (a) of 2.5 mils. The platform can be modeled as shown in the figure. The equivalent stiffness (K) of the platform is 1 million-lb/in, and the equivalent damping is C=100 lb-s/in. The operating speed of the generator is 1800 rpm. (a) determine the response of the platform (amplitude and phase) at the operating speed.(b) determine the response of the platform (amplitude and phase) if the rotor spins with a speed coinciding with the system natural frequency. (c) if the platform stiffness is increased by 25%, determine the allowable amount of imbalance (a) that will give the same amplitude of motion as determined in (a). Assume that the mass of the platform and the damping do not change appreciably by performing the stiffening.
Names:MEEN 363 - QUIZ 3

K 1.25 K⋅:= to maintain Yoper 7.894 10 4−× in=
calculate the NEW system natural frequency and damping ratio:
ωnKM
.5:= ζ
C2 M⋅ ωn⋅
:=
ωn 238.281rads
= ζ 9.531 10 3−×= small change in damping ratio
and operating frequency ratio (r) for rotor speed: RPM 1800:=
ω RPM2 π⋅60
⋅rads
⋅:=ω 188.496
rads
= r ωωn
:= r 0.791=from relationship:
Yop r( ) aMrotor
M⋅
r2
1 r2−( )22 ζ⋅ r⋅( )2
+
.5⋅:=
determine the (new) allowable imbalance:
aYoper
Mrotor
Mr2
1 r2−( )22 ζ⋅ r⋅( )2
+
.5⋅
:=
a 5.354 10 3−× in=
i.e. ~ twice as original imbalance (eccentricity) displacement,
Thus, at r 0.884= <1
Yop r( ) 7.894 10 4−× in= Ψ r( )180
π⋅ 4.947−= [degrees]
Let: Yoper Yop r( ):=
(b) If the rotor should spin with a speed coinciding with the system natural frequency,
r 1:=
ω ωn:=
RPM ω602 π⋅
⋅s
rad⋅:= RPM 2.035 103×=
the system response is
Yop 1( ) 0.01 in= Ψ 90−:= degrees Yop 1( )
Yoper13.111=also determined from:
aMrotor
M⋅
12 ζ⋅
⋅ 0.01 in=
(c) If the platform increases K by 25%, Koriginal K:=

operation near to resonance:
b) The amplitude of motion (A) for the casing and desired (Yop) for the sensing element at frequency ratio (r) are:
A 0.005 in⋅:= Yop 0.015 in⋅:=
and related by: Yop
A1 2 ζ⋅ r⋅( )2
+
1 r2−( )22 ζ⋅ r⋅( )2
+
.5
= [1]
Let's define G as the ratioG
Yop
A:= G 3=
From the expression for amplitude ratio:Yop
A[1]
G2 1 r2−( )22 ζ⋅ r⋅( )2
+
⋅ 1 2 ζ⋅ r⋅( )2
+=
we can determine the damping ratio (ζ) from:
G2 1 r2−( )2
⋅ 1− 2 ζ⋅ r⋅( )2
1 G2−( )⋅=
Example: Base motion excitation
An instrumentation sensor with mass 0.5 lb is attached to the casing of a steam turbine running at 3600 rpm. The casing motion has an amplitude of 0.005 in. Test show that the mass supported by the sensor attached has a natural frequency of 70 Hz. How much damping (lb.s/in) is needed to keep the sensor steady state amplitude below 0.015 in? Calculate the sensor stiffness (lb/in).
KEY:
This is a typical problem in which the source of excitation for the sensing element is base motion. The sensing element is a simple spring-mass-damper system.
a) calculate frequency ratio (r) giving us information on the regime of operation (below, around or above the natural frequency)
excitation frequency: RPM 3600:= W 0.5 lbf⋅:= M 0.5 lb⋅:=
ω RPM2 π⋅60
⋅rads
⋅:= ω 376.99rads
=
natural frequency: ωn 70 2⋅ π⋅rads
⋅:= ωn 439.82rads
=
frequency ratio:r ω
ωn:= r 0.86=

or:ζ
G2 1 r2−( )2
⋅ 1−
2 r⋅( )2 1 G2−( )⋅
.5
:=
Thus, at r 0.86= ζ 0.12= is the damping ratio needed to producethe desired amplitude ratio. G 3=
c) The desired damping coefficient is equal to:C 2 ζ⋅
Wg
⋅ ωn⋅:=
C 0.14 lbfsecin
⋅= C 24.91Nsm
⋅=
The stiffness of the sensor element is:K ωn
2M⋅:=
K 4.39 104×Nm
= K 250.52lbfin
=

[3]θ t( ) ΘM H r( )⋅ sin ω t⋅ φ−( )⋅=
based on the periodic force response of a second order system, the impeller dynamic responseis given by:
ζ 0.387=ζDθ
2 I⋅ ωn⋅:=
fn 30.82 Hz=
fnωn
2 π⋅:=ωn 193.649
rads
=ωnKθ
I
.5
:=
the natural frequency and damping ratio equal:
[2]I 2tθd
d
2⋅ Dθ
tθd
d⋅+ Kθ θ⋅+ Kθ θe⋅= Kθ ΘM⋅ sin ω t⋅( )⋅=
Thus, the equation of motion is:
Kθ 7.5 Nmrad
⋅=Kθ1
K1
1K2
+
1−:=K2 30 N⋅
mrad
⋅:=K1 10 N⋅mrad
⋅:=
where the stiffness of the stepped shaft equals (springs in series)
drive torque from transmission shaftTorquedrive Kθ θe θ−( )⋅=
Dθ 3 N⋅ cm⋅s
rad⋅:=drag torque from viscous fluid (paint)Torquedrag Dθ
tθd
d⋅=
I 2 kg⋅ cm2⋅:=[1] mass moment of inertia
I 2tθd
d
2⋅
Torquedrive Torquedrag−=
a) Derive equation of motion: Sum of moments
θ(t)
Hub &paddles
Stepped steelshaft: lengths(l1,l2) anddiameters(d1,d2)
Schematic view of paint mixer
θe(t)
A device to mix painting is composed of the paddlesand hub connected through a stepped steel shaft to an electric motor. The massmoment of inertia (I) of the hub and blades is 2 kg.cm2, and the painting introducesa viscous damping (Dθθθθ) equivalent to 3 N.cm.s/rad. The stiffnesses ofthe connecting shafts equal 10 and 30 Nm/rad, respectively.a) Derive the equation of motion for the paddles angular displacement
θ(t) as a function of the motor displacement θe(t)=Θm sin(ωt).a) Calculate the system natural frequency, critical damping and
damping ratiob) Calculate & graph the FRF (amplitude and phase) of the paint
mixerc) At what motor speed the amplitude of response is the largest?d) The engine operates at a frequency of 25 Hz with amplitude Θm = 22
degrees. Determine the twist angle and moment on the drive shaft. Arethe calculated values reasonable (acceptable)?
MEEN 363 - Torsional vibrations ORIGIN 1:=

f 25Hz:= ΘM 22:= degrees
ω f 2⋅ π⋅:= rffn
:= r 0.811= notice that this operating frequency is very close to the one giving the peak motion.
H r( ) 1.398= φ r( ) 61.438= degrees
let: θr ΘM H r( )⋅:= θr 30.753= degrees
φr φ r( )π
180⋅:= radians (phase angle)
Let: period of motion: T1f
:= T 0.04 s=
where H and φ are the amplification ratio and phase lag, defined as:
H r( )1.
1 r2−( )22 ζ⋅ r⋅( )2
+
.5:= φ r( ) φ atan
2 ζ⋅ r⋅
1 r2−
←
φ φ π+← r 1>if
φ180π
⋅return
:= [4]
with rωωn
= as the frequency ratio. in degrees
Graphs of the amplitude ratio and phase angle follow:
0 1 2 3 40
1
2
frequency ratio
Am
plitu
de ra
tio H
0 2 40
100
200
frequency ratio
Phas
e la
g (d
egre
es)
since there is a fair amount of damping, the peak amplitude of motion does NOT happen at r=1, i.e. when the engine frequency coincides with the natural frequency. Reviewing our knowledge, recall that the maximum amplitude occurs are (See Handout USES of FRF)
rpeak 1 2 ζ2
⋅−( ).5:= rpeak 0.837=
H rpeak( ) 1.4= Hpeak1
2 ζ⋅1
1 ζ2
−( ).5⋅:=
Hpeak 1.4= φ rpeak( ) 65.16= degrees
for engine operation at

thus, the drive forcing function and mixer responses are:
θe t( ) ΘM sin ω t⋅( )⋅:= θ t( ) θr sin ω t⋅ φr−( )⋅:=
Graph both angular responses vs. time (2 periods of motion)
0 0.02 0.04 0.0650
0
50
enginemixer
time (s)
Ang
le (d
egre
es)
θe t( )
θ t( )
t
T 0.04 s=
the twist angle is defined as θtwist t( ) θe t( ) θ t( )−:=
0 0.02 0.04 0.0650
0
50
time (s)
Ang
le (d
egre
es)
θtwist t( )
t
i.e. approximatelty equal to.θTWIST 27
π180
⋅:=
The ampltude of the drive moment transmitted through the stepped shaft is just
Torquedrive Kθ θTWIST⋅:=
Torquedrive 3.534 N m⋅=

G2 1 r2 22 r 2
1 2 r 2
=
and working with eqn [1]: G 2.5Define G as GYop
b
[1]
Yop 5 ftdesiredYop
bG r( )= 1 2 r 2
1 r2 22 r 2
.5
=
Yop b G r( ) cos t =r
n=
(b) The car motion amplitude (Yop) as a function of the amplitude of road wave amplitude (b), frequency ratio (r) and damping ratio is (from Cheat Sheet):
Vn 102.27mphVn 150ft
sec
Vn L fn
LV
Tn= 2
n= 1
fn=
mph5280 ft
3600 sec
(a) the car speed must excite the car-suspension system natural frequency. The relationship between the natural period of vibration (Tn) and the time it takes the car to travel a full wave length (L) is
amplitude of waveb 2 ftKEY:path wavelengthL 50 ft
n 18.85radsec
n fn 2 fn 3 Hz
M 2000 lb
Data:
C K
L=50 ft
suspensionsystem
M
b=2 ft
V (velocity)
Y
Yb
The figure shows a vehicle moving with speed V along a wavy road. Prior tests show that the vehicle weighing 2000 lbf has a natural frequency of 3 Hz. Neglect the influence of the tire's bouncing mode and determine:
a) the car speed (V) in mph (miles/hour) that will cause the highest amplitude of motion for the vehicle? Explain your answer
b) Find the damping ratio () and damping coefficient (C lin lbf.s/in) for the car speed in (a) such that the vehicle's absolute amplitude of motion is less than 5 ft.
c) Using C found in (b), calculate the vehicle steady amplitude of motion (ft) at a cruising speed V of 70 mph?
Example: Base motion excitation L San Andres (2007)

204 mph
Vn 150ft
sec
0 50 100 150 200 250 3000
2
4
6
car speed (ft/sec)
ampl
itude
of r
espo
nse
(ft)
(d) For completeness, graph the amplitude of response for multiple car speeds
Yop r( ) 3.42 ft
Yop r( ) b1 2 r 2
1 r2 22 r 2
.5
frequency ratior 0.68r
ffn
excitation frequencyf 2.05HzfVL
fn 3HzV 102.67ft
secV 70 mph
(c) At a cruising speed of
C 42.62 lbfsecin
C 2 M n
The needed damping coefficient equals:
G 2.5is the damping ratio needed to produce the desired amplitude ratio, 0.22
[2]1
4 1 G2
.5or
G2 1 r2 2
1
2 r( )2 1 G2
.5
r 1at
determine the damping ratio () from:G2 1 r2 2
1 2 r 2 1 G2 =

Fo
Kω
2⋅
Fo
Mω
2
ωn2
⋅=Fo
Kr2⋅=since:[6]aop r( )
Fo
Mr2⋅
1 r2−( )22 ζ⋅ r⋅( )2
+
.5=
where:
[5]aY t( ) ω2
− Yop⋅ sin ωt ψ+( )⋅= aop sin ωt Ψ+ 180−( )⋅=
from [2], we find that the acceleration is given by: [4]rωωn
=with
[3b]Ψ atan2 ζ⋅ r⋅
1 r2−
−=[3a]Yop r( )
Fo
K
1 r2−( )22 ζ⋅ r⋅( )2
+
.5=
[2]Y t( ) Yop sin ωt ψ+( )⋅=
[1]F t( ) Fo sin ωt( )⋅=Recall that for an imposed external force of periodic form:
the system response Y(t) is given by:
where the amplitude of motion (Yop) and phase angle (Y) are defined as:
Solution:
Test datashowing amplitude of(acceleration/force)
0 50 100 1500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Magnitude of FRF for mechanical systemfrequency (Hz)
Acc
eler
atio
n/Fo
rce
(m/s
^2/N
)
1
0
A x( )
1500 x
Dynamic measurements were conducted on a mechanical system to determine its FRF (frequency response function). Forcing functions with multiple frequencies were exerted on the system and a digital signal analyzer (FFT) recorded the magnitude of the ACCELERATION/FORCE ([m/s2]/N) Frequency Response Function, as shown below. From the recorded data determine the system parameters, i.e. natural frequency (wn:rad/s) and damping ratio (z), and system stiffness (K:N/m), mass (M:kg), and viscous damping coefficient (C:N.s/m). Explain procedure of ANALYSIS/INTERPRETATION of test data for full credit.
EXAMPLE - EXAM 2 TYPE:

The number of calculations is minimal. One needs to interpret correctly the test data results, however.
C 314.159 Nsm
⋅=C ζ 2⋅ M⋅ ωn⋅:=
Once the damping ratio is obtained, the damping coefficient can be easily determined fromthe formula:
12 ζ⋅
10.1
= 10=
That is, the system has a damping ratio equal to 5%. This result could have also been easily obtained by studying the ratio of (amplitude at the natural frequency divided by the amplitude at very high frequency, i.e.)
ζ 0.05=
ζ1
2 M⋅1.0kg
⋅:=
from the graph (test data), the ratio is approximately equal to one (1/kg). Thus. the damping ratio is determined as
aop 1( )
fo
12 M⋅ ζ⋅
=
for excitation at the natural frequency (r=1), the ratio of amplitude of acceleration to force reduces to
K 9.87 105×Nm
=K ωn2
M⋅:=
We can estimate the stiffness (K) from the fundamental relationship:
ωn 314.159rads
=ωn fn 2⋅ π⋅:=expressed in rad/s as:
fn 50 Hz⋅:=Thus, take the natural frequency as
The system appears to have little damping, i.e. amplitude of FRF around a frequency of50 Hz is rather large and varying rapidly over a narrow frequency range.
M 10 kg⋅:=Thus
1M
0.1m
s2 N⋅
⋅=From the graph(test data):
1M
aop r( )
Fo←For excitation at very high frequencies, r>>1.0
m
s2
N
[7]aop r( )
Fo
r2
1 r2−( )22 ζ⋅ r⋅( )2
+
.5
1M
⋅=
The units of this expressionare 1/kg =
thus, the magnitude of amplitude of acceleration over force amplitude follows as:

C 2 103× sNm
=
ωd ωn 1 ζ2
−( ).5⋅:= fd
ωd2 π⋅
:=Td
1fd
:=Td 0.063s=damped natural period
Set frequencies and amplitudes of the excitation z(t) are:
a1 0.05 m⋅:= a2 0.05 m⋅:= a3 0.05 m⋅:=
ω1ωn2
:= ω2 ωn910⋅:= ω3 2.2 ωn⋅:=
assemble: z t( ) a1 cos ω1 t⋅( )⋅ a2 sin ω2 t⋅( )⋅+ a3 cos ω3 t⋅( )⋅+:=
0 0.051 0.1 0.15 0.2 0.250.2
0
0.2excitation displacement
time (s)
z(t)
[m]
4 periods of damped natural motion
Example: system response due to multiple frequency inputsConsider a 2nd order system described by the following EOM L San Andres (c) 2008
M2tYd
d
2⋅ C
tYd
d⋅+ K Y⋅+ K z t( )⋅= where
z t( ) a1 cos ω1 t⋅( )⋅ a2 sin ω2 t⋅( )⋅+ a3 cos ω3 t⋅( )⋅+:=
is an external excitation displacement functionFind the forced response of the system, i.e, find Y(t)
Given the system parameters M 100 kg⋅:= K 106 Nm⋅:= ζ 0.10:=
calculate natural frequencyand physical damping
ωnKM⎛⎜⎝
⎞⎟⎠
0.5:=
fnωn2 π⋅
:= fn 15.915Hz=
C 2 M⋅ ωn⋅ ζ⋅:=

SYSTEM RESPONSE is: Y t( ) ai H⋅ cos ωi t⋅ φi+( )⋅:=
The system frequency response function: amplitude and phase angle are
H r( )1
1 r2−( )22 ζ⋅ r⋅( )2+⎡⎣ ⎤⎦
.5:= φ r( ) φ atan
2 ζ⋅ r⋅
1 r2−
⎛⎜⎝
⎞⎟⎠
−←
φ φ π−← r 1>if
φreturn
:=
graphs of frequency response functionAmplitude and phase lag as a function of r
ω
ωn= frequency ratio
0 0.5 1 1.5 2 2.5 30
1
2
3
4
5
6Amplitude of FRF
Frequency ratio
Am
plitu
de H
(r)
Q factor−
1
2 ζ⋅5=
0 0.5 1 1.5 2 2.5 3180
135
90
45
0Phase angle of FRF
Frequency ratio
Phas
e an
gle
(deg
ree)

φ2180
π⋅ 43.452−= degreesY2 0.191m=
for third excitation: r3ω3ωn
:= φ3 φ r3( ):= r3 2.2=H r3( ) 0.259=
Y3 a3 H r3( )⋅:= φ3180
π⋅ 173.463−= degreesY3 0.013m=
Assemble physical response:
Y t( ) Y1 cos ω1 t⋅ φ1+( )⋅ Y2 sin ω2 t⋅ φ2+( )⋅+ Y3 cos ω3 t⋅ φ3+( )⋅+:=
Now graph the response Y(t) and the excitation z(t):
0 0.051 0.1 0.15 0.2 0.250.4
0.2
0
0.2
0.4
ZY
excitation & response
time (s)
z( &
Y(t)
[m]
Note: The response Y shows little motion at the highest excitation frequency (ω3).There is an obvious amplification of motion with second frequency (ω2 ~ ωn).
To understand better,let's plot the actual FRF:
Td 0.063s=
The response of the system is given by the superposition of individual responses, i.e
Y t( ) Y1 cos ω1 t⋅ φ1+( )⋅ Y2 sin ω2 t⋅ φ2+( )⋅+ Y3 cos ω3 t⋅ φ3+( )⋅+:=
wherer1
ω1ωn
:= r1 0.5=for first excitation: φ1 φ r1( ):=H r1( ) 1.322=
Y1KK
a1⋅ H r1( )⋅:= φ1180
π⋅ 7.595−= degreesY1 0.066m=
for second excitation: r2ω2ωn
:= φ2 φ r2( ):= r2 0.9=H r2( ) 3.821=
Y2 a2 H r2( )⋅:=

0 0.5 1 1.5 2 2.5 30
0.05
0.1
0.15
0.2
0.25
0.3
allr1r2r3
Amplitude of response
Frequency ratio
Am
plitu
de [m
]a1 0.05m=
r1 0.5= Y1 0.066m=
r2 0.9= Y2 0.191m=
r3 2.2=
Y3 0.013m=
Note how response amplitude for largest frequency is largely attenuated
Y3 a3<
while amplitudes for first two frequencies are amplified, in particular for ω2 which is close to the natural frequency
0 0.5 1 1.5 2 2.5 3180
135
90
45
0
allr1r2r3
Phase angle of response
Frequency ratio
Phas
e an
gle
(deg
ree)
Y2a2
3.821=
Y1a1
1.322=

Td1fd
:=Td 0.063s=damped natural period
Example - square waveDefine periodic excitation function:zo 0.1 m⋅:=
TTd
.33333:=z t( ) amp zo← t
T2
<if
amp zo−← tT2
>if
amp
:=
0 0.063 0.13 0.190.2
0
0.2
time(s)
ampl
itude
(m)
z t( )
t
Ω2 π⋅T
:= fundamental frequency
Ω
ωd0.333=
NF 7:= number of Fourier coefficients
Find Fourier Series coefficients for excitation z(t)
mean value a01T 0
Ttz t( )
⌠⎮⌡
d⋅:=a0 0m=
Example: system response due to periodic functionConsider a 2nd order system described by the following EOM L San Andres (c) 2008
ORIGIN 1:=M
2tYd
d
2⋅ C
tYd
d⋅+ K Y⋅+ K z t( )⋅= where z (t) is an external periodic excitation function
Given the system parameters M 100 kg⋅:= K 106 Nm⋅:= ζ 0.10:=
calculate natural frequencyand physical damping
ωnKM⎛⎜⎝
⎞⎟⎠
0.5:=
fnωn2 π⋅
:= fn 15.915Hz=
C 2 M⋅ ωn⋅ ζ⋅:=C 2 103× s
Nm
=
ωd ωn 1 ζ2
−( ).5⋅:= fd
ωd2 π⋅
:=

fmm Ω⋅
ωn:=(a) set frequency ratio
m 1 NF..:=
Yo a0KK⋅:=
Y t( ) Yo1
NF
m
Ycm cos m Ω⋅ t⋅(⋅( ) Ysm sin m Ω⋅ t⋅( )⋅+⎡⎣ ⎤⎦∑=
+:=SYSTEM RESPONSE is:
Find the forced response of the system, i.e, find Y(t)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2Fourier coefficients
ampl
itude zaFj
j
NF 7=
0 0.063 0.13 0.190.2
0
0.2
actualFourier Series
time(s)
ampl
itude
(m)
z t( )
ZF t( )
t
AmplitudeZF t( ) a0
1
NF
j
aj cos j Ω⋅ t⋅( )⋅ bj sin j Ω⋅ t⋅( )⋅+( )∑=
+:=zaFj
aj( )2 bj( )2+⎡⎣ ⎤⎦.5
:=
Build z(t) as a Fourier series
bT 0.127 0 0.042 0 0.025 0 0.018( ) m=aT 0 0 0 0 0 0 0( ) m=
bj2T 0
Ttz t( ) sin j Ω⋅ t⋅( )⋅
⌠⎮⌡
d⋅:=aj2T 0
Ttz t( ) cos j Ω⋅ t⋅( )⋅
⌠⎮⌡
d⋅:=coefs of cos & sin
j 1 NF..:=

(b) build denominator denm 1 fm( )2−⎡⎣ ⎤⎦2
2 ζ⋅ fm⋅( )2+:=
(c) build coefficient of cos()
YcmKK
am 1 fm( )2−⎡⎣ ⎤⎦⋅ 2 ζ⋅ fm⋅ bm⋅−⎡⎣ ⎤⎦denm
⋅:=
(d) build coefficient of sin()
YsmKK
bm 1 fm( )2−⎡⎣ ⎤⎦⋅ 2 ζ⋅ fm⋅ am⋅+⎡⎣ ⎤⎦denm
⋅:=
(e) for graph of components YFmYcm( )2 Ysm( )2+⎡⎣ ⎤⎦
.5:=
Y t( ) Yo1
NF
m
Ycm cos m Ω⋅ t⋅( )⋅ Ysm sin m Ω⋅ t⋅( )⋅+( )∑=
+:=
Now graph the response Y(t) and the excitation (Fourier) z(t):
0 0.11 0.23 0.34 0.45 0.570.4
0.2
0
0.2
0.4
ZY
excitation & response
time (s)
z( &
Y(t)
[m]
TTd
3= Ω
ωn0.332=
0 1 2 3 4 5 6 7 8 9 100
0.067
0.13
0.2
input Zoutput Y
Fourier coefficients
ampl
itude
3 periods of fundamental excitation motion

Note: obtain response for inputs with increasing frequencies (periods decrease)
=================================================
0 0.24 0.47 0.71 0.950.4
0.2
0
0.2
0.4
ZY
excitation & response
time (s)
z( &
Y(t)
[m]
TT d
5= Ω
ω n0.199=
0 1 2 3 4 5 6 7 8 9 100
0.067
0.13
0.2
input Zoutput Y
Fourier coefficients
ampl
itude
0 0.13 0.25 0.380.4
0.2
0
0.2
0.4
ZY
excitation & response
time (s)
z( &
Y(t)
[m]
TT d
2= Ω
ω n0.497=
0 1 2 3 4 5 6 7 8 9 100
0.067
0.13
0.2
input Zoutput Y
Fourier coefficients
ampl
itude
0 0.063 0.13 0.190.4
0.2
0
0.2
0.4
ZY
excitation & response
time (s)
z( &
Y(t)
[m]
TT d
1= Ω
ω n0.995=
0 1 2 3 4 5 6 7 8 9 100
0.067
0.13
0.2
input Zoutput Y
Fourier coefficients
ampl
itude

0 0.024 0.047 0.071 0.0950.4
0.2
0
0.2
0.4
ZY
excitation & response
time (s)
z( &
Y(t)
[m]
TTd
0.5= Ω
ωn1.99=
0 1 2 3 4 5 6 7 8 9 100
0.067
0.13
0.2
input Zoutput Y
Fourier coefficients
ampl
itude
================================================= fastest Z (smallest period)
0 0.013 0.025 0.0380.4
0.2
0
0.2
0.4
ZY
excitation & response
time (s)
z( &
Y(t)
[m]
TTd
0.2= Ω
ωn4.975=
0 1 2 3 4 5 6 7 8 9 100
0.067
0.13
0.2
input Zoutput Y
Fourier coefficients
ampl
itude

MEEN 363 Example: Torsional vibrations – Wind Turbine 40
EXAMPLE TORSIONAL VIBRATIONS: A cantilevered steel pole supports a small wind turbine. The pole torsional stiffness is K (N.m/rad) with a rotational damping coefficient C (N.m.s/rad). The four-blade turbine rotating assembly has mass mo, and its center of gravity is displaced distance e [m] from the axis of rotation of the assembly. Iz (kg.m2) is the mass moment of inertia about the z axis of the complete turbine, including rotor assembly, housing pod, and contents.
The total mass of the system is m (kg). The plane in which the blades rotate is located a distance d (m) from the z axis as shown. For a complete analysis of the vibration characteristics of the turbine system, determine: a) Equation of motion of the torsional vibration system about the z axis. b) The steady-state torsional response θ(t) (after all transients die out). c) For system parameter values of k=98,670 N.m/rad, Iz=25 kg.m2, C= 157
N.m.s/rad, and mo=8 kg, e=1cm, d=30 cm, present graphs showing the response amplitude (rad) and phase angle as the turbine speed (due to wind power variations) changes from 100 rpm to 1,200 rpm.
d) From (c), at what turbine speed should the largest vibration occur and what is its magnitude?
e) Provide a design recommendation or change so as to reduce this maximum vibration amplitude value to half the original value.
Neglect any effect of the mass and bending of the pole on the torsional response, as well as any gyroscopic effects.
Z
m0
e
d
X Y
t
Me
0
2
m0
d
X
Z Y
k
M e cos t0
2
c
k= Torsional Tiffnesse= Torional Damping coefficient

MEEN 363 Example: Torsional vibrations – Wind Turbine 41
Note: the torque or moment induced by the mass imbalance is ( )2
( ) cos( )u oT d F d m e tω ω ω= × = , i.e., a function of frequency (the rotational speed of the turbine)
The equation describing torsional motions of the turbine-pole system is:
( )2( ) cos( ) cos( )z oI C K m e d t T tωθ θ θ ω ω ω+ + = = (1)
Note that all terms in the EOM represent moments or torques. (b) After all transients die out, the periodic forced response of the system is
( )( ) ( )
( ) 1/22 22cos
1 2
sst t
f f
θθ ω φζ
= −⎡ ⎤− +⎣ ⎦
(2)
where 2
( ) 2 o oss
z
T m ed m ed fK K I
ω ωθ = = = (3)
with ; ;2n
n z z
K CfI K I
ω ω ζω
= = = , and 1
22tan
1ff
ζφ − ⎛ ⎞= ⎜ ⎟−⎝ ⎠ (4)
Eq. (3) in (2) leads to
( ) ( )
2
( ) 1/22 22
cos( - )1 2
ot
z
m ed f tI f f
θ ω φζ
⎧ ⎫⎪ ⎪
= ⎨ ⎬⎡ ⎤⎪ ⎪− +⎣ ⎦⎩ ⎭
(5)
Let o
z
m edI
θ∞ = (6) & ( ) ( )
2
1/ 22 221 2
fBf fζ
=⎡ ⎤− +⎣ ⎦
(7)
and rewrite Eq. (5) as: ( )( ) cos ( )t B tθ θ ω φ∞= − (8)

MEEN 363 Example: Torsional vibrations – Wind Turbine 42
(c) for the given physical values of the system parameters:
K = 98,670 N-m/rad rad
sec62.82 n
z
KI
ω = =
Iz = 25 kg m2 0.052 z
CK I
ζ = =
C = 157 N-m/(rad/s)
2-58 0.01 0.3 0.024 96 10 rad
25 25o
z
m ed kg m mI kg m
θ∞⋅ ⋅
= = = =
And the turbine speed varies from 100 rpm to 1,200 rpm, i.e., ω = rpm π/30 = 10.47 rad/s to 125.66 rad/s, i.e.
n
f ωω
= = 0.167 to 2.00,
thus indicating the system will operate through resonance. Hence, the torsion or twist angle (system response) is
( )5( ) 96.4 10 rad cos ( )t B tθ ω φ−= ⋅ −
(d) Maximum amplitude of response Since the damping ratio is small, ζ << 1, the maximum amplitude of motion will occur when the turbine speed coincides with the natural frequency of the torsional system, i.e., at f = ω/ωn = 1, thus 1
2B ζ≈ ; and
1( ) cos2 2
t t πθ θ ωζ∞
⎛ ⎞= ⋅ −⎜ ⎟⎝ ⎠
the magnitude is max-2 rad0.964 x 10
2θθ
ξ∞= = , i.e. 10 times larger than θ∞ .
The figures below depict the amplitude ( )Bθ∞ (degrees) and phase angle φ (degrees) of the pole twist as a function of the turbine rotational speed (RPM)

MEEN 363 Example: Torsional vibrations – Wind Turbine 43
200 400 600 800 1000 12000
0.005
0.01
rotor speed (RPM)
ampl
itude
of t
orsi
on (r
ad)
200 400 600 800 1000 12000
60
120
180
rotor speed (RPM)
Phas
e an
gle
(deg
rees
)
(e) Design change: DOUBLE DAMPING but first BALANCE ROTOR!









![Chapter 2 Response to Harmonic Excitation · 2018. 1. 30. · 2 2 2 2 22 2 ( ) cos( tan ) ( ) (2 ) n p nn n X f x t t T]Z Z Z Z Z ]Z Z ZZ §· ¨¸ ©¹ Add homogeneous and particular](https://static.fdocument.org/doc/165x107/61035af8ca0a8c1a4026d7b4/chapter-2-response-to-harmonic-excitation-2018-1-30-2-2-2-2-22-2-cos-tan.jpg)