x x x x n o a p - ccim.upt.roccim.upt.ro/files/documentatie/br/TEME_BR.pdf · TEME BAZELE ROBOTICII...
16
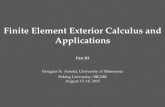
TEME BAZELE ROBOTICII 1. Modelul geometric al unui robot 0 T 1 2 T 3 x 0 Baza robotului = Element 0 Element 1 θ 2 θ 3 z 0 θ 1 x 2 z 2 x 1 z 1 1 T 2 Efector final y 3 , o z 3 , a Element 2 Element 3 x 3 , n 3 2 2 1 1 0 3 0 T T T G ⋅ ⋅ = Spaţiul cuplelor n variable (q 1 , , q n ) Spaţiul operaţional 6 variable (x, y, z, α, β, γ) sau 12 variabile (n, o, a, p) MG - DIRECT MG - INVERS n 1 n 1 i i i 1 i 2 1 1 0 n 0 T T T T T G - + - ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ = K K f(q 1 ) f(q 2 ) f(q i ) f(q i+1 ) f(q n ) = = 1 0 0 0 0 z z z z y y y y x x x x p a o n p a o n p a o n G ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) n 1 12 z n 1 11 y n 1 10 x n 1 9 z n 1 8 y n 1 7 x n 1 6 z n 1 5 y n 1 4 x n 1 3 z n 1 2 y n 1 1 x q , , q f p q , , q f p q , , q f p q , , q f a q , , q f a q , , q f a q , , q f o q , , q f o q , , q f o q , , q f n q , , q f n q , , q f n K K K K K K K K K K K K = = = = = = = = = = = = ( ) i i i i i 1 i d , , , f θ α = - l T
Transcript of x x x x n o a p - ccim.upt.roccim.upt.ro/files/documentatie/br/TEME_BR.pdf · TEME BAZELE ROBOTICII...

TEME BAZELE ROBOTICII
1. Modelul geometric al unui robot
0T1
2T3
x0 Baza robotului = Element 0
Element 1
θ2
θ3
z0
θ1
x2
z2
x1
z1
1T2
Efector final
y3, o
z3, a
Element 2
Element 3
x3, n
3
2
2
1
1
0
3
0TTTG ⋅⋅=
Spaţiul cuplelor n variable
(q1 , �, qn)
Spaţiul operaţional 6 variable
(x, y, z, α, β, γ) sau
12 variabile
(n, o, a, p)
MG - DIRECT
MG - INVERS
n
1n
1i
i
i
1i
2
1
1
0
n
0TTTTTG
−
+
−⋅⋅⋅⋅⋅⋅= KK
f(q1) f(q2) f(qi) f(qi+1) f(qn)
=
=
1000
0
zzzz
yyyy
xxxx
paon
paon
paon
G
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )n112z
n111y
n110x
n19z
n18y
n17x
n16z
n15y
n14x
n13z
n12y
n11x
q,,qfp
q,,qfp
q,,qfp
q,,qfa
q,,qfa
q,,qfa
q,,qfo
q,,qfo
q,,qfo
q,,qfn
q,,qfn
q,,qfn
K
K
K
K
K
K
K
K
K
K
K
K
=
=
=
=
=
=
=
=
=
=
=
=
( )iiiii
1id,,,f θα=
−
lT

2. Modelul diferenţial al unui robot
0
z
x y
0
z
x y
Sistemul de referinţă ţintă
Sistemul de referinţă ataşat camerei
y0
x0 Sistemul de referinţă ataşat bazei robotului
a (t)
n (t)
Sistemul de referinţă ataşat efectorului
z0
p (t) 0
z
x
y
o (t)
qrGn DJD ⋅=
( ) DJD nG1
rq ⋅=
−
Spaţiul cuplelor n variable
(dq1 , �, dqn)
MDiferenţial - DIRECT
MDiferenţial
- INVERS
DnG
Spaţiul operaţional 6 variable
(dx, dy, dz, δx, δy, δz) q
D
Model diferenţial qrDJD ⋅=
y0
x0
o'(t)
z0
p(t)
O0
x'
y'
z' n(t)
a'(t) n'(t)
o(t)
a(t)
p'(t)
GGGG d00r0'0
+==

3. Calculul torsorilor pentru elementele şi cuplele unui robot
Torsori in cuple τ0 Q
Torsori ce actioneaza asupra elementelor robotului τ0 τ
0T1
2T3
x0
Baza robotului = Element 0
Element 1
θ2
θ3
z0
θ1
x2
z2
x1
z1
1T2
Efector final
y3, o
z3, a
Element 3
x3, n
3
2
2
1
1
0
3
0TTTG ⋅⋅=
G
M
Q2 Element 2
Q3
τ0 τ1
τ2 τ3
Q1
τ• O
GT
r
n ]J[ = Q
( )[ ]O
T1
GiO
Gi
iττ ⋅=
−
J
Jr – Jacobianul robotului
JGi – Jacobianul sistemului atasat elementului i

4. Modelul dinamic al unui robot
(F(t), M(t)) G(t)
G(t) + )t(),t(),t( q q q &&& (F(t), M(t))
(F(t), M(t)) + )t(),t(00
GG & )t(),t(),t( q q q &&&
Model direct
Model invers
Transformări de coordonate
şi derivări
Mişcare
test
)t(),t(),t( q q q &&&
Model
Dinamic
Direct
Forţe perturbatoare
Restricţii mecanice Forţe generalizate
Forţe active
Frecări
+ -
Transformări inverse de coordonate
)t(),t(),t( q q q &&&
Modelele mecanismelor de acţionare
Forţe generalizate
Forţe active
Frecări
+
Modelele motoarelor
Model
Dinamic
Invers
Transformări directe de
coordonate
-
+
-

5. Structurarea sarcinii unui robot
z0
x0 y0
yB
ℜB ℜ0
xB
zB
ℜBU
xBU
yBU zBU
ℜP
xP yP
zP
B Gn E = Ci M
ℜB ℜCi
Gn
B Gn E
Ci M

ADFBPGPEBFBPGiP0Gn
n
B0
8 i= :f ⋅⋅⋅⋅⋅ G
Prinderea
bulonului
][PA]BU[ = ][E]G[[B] :f
][AD]BU[ = ][E]G[[B] :f
i6
0
2
i6
0
1
alezajån fixat bulonului Eliberarea
][FB][PA]PG[P][ = ][E]G[[B] :f
][PV][PA]PG[P][ = ][E]G[[B] :f
][CP][PA]PG[P][ = ][E]G[[B] :f
][TB][PA]PG[P][ = ][E]G[[B] :f
][RV][PA]BU[ = ][E]G[[B] :f
bulonului Apucarea
i6
0
7
i6
0
6
i6
0
5
i6
0
4
i6
0
3
Eliberarea bulonului

6. Corecţii pentru poziţia şi orientarea efectorului final al unui robot
( )iiiii
1id,,,f θα=
−
lT
ii
r
i
ii
r
i
ii
r
i
ii
r
i
dddd
d
d
d
+=
θ+θ=θ
+=
α+α=α
lll
( ) ( )iiiiiiii
rrrrr1iddd,d,d,dfd,,,f
iiiii
+θ+θ+α+α=θα=−
lllT
ℜ0
ℜ1
ℜ2
ℜn
ℜn-1
ℜn-2
ℜ1
r
ℜ2
r
ℜn-2
r
ℜn-1
r
ℜn
r
EF
EFr
( )EEE
z,y,xE
( )r
E
r
E
r
EzyxE ,,

7. Expandarea obstacolelor
Obstacol expandat şi robot modelat sub formă de disc
Obstacole expandate şi robot punctiform
Obstacol
Obstacole
expandate
Robot
Obstacol
Obstacol
Obsta
col

Obstacole expandate

8. Metoda grafului vizibilităţii
Graful vizibilitatii
Drumul minim

9. Metoda retractării
Elementele Diagramei Voronoi pentru obstacole modelate prin poligoane
Ciniţial
Cfinal
S1
E2
E1
E3
E5
E6
E7
E8 E9
E10 E11
E12
E13
E14
E15
E16
E17
E18
E19
E20
E21
E22
E23
X1
X2
X3
X4
X5
X6
X7
X8
X9
X10
X11
X12
X13
X14
X15
X16
X17
X18 X19
X20 X21
S2
S3
S4
Segment mediatoare
Arc parabolă
Segment bisectoare
Diagrama Voronoi pentru o mulţime finită
de puncte

10. Metoda descompunerii poligonale Descompunerea triunghiulară
Descompunerea triunghiulară asociată spaţiului de lucru
Etichetarea celulelor triunghiulare ki
Graful de conexitate G asociat descompunerii K
1
2
3
8
9
7
6 4
10
5
11
12
13
Cinitial
Cfinal
11
2 3
4 5
6
8
9
10
Cinitial
Cfinal
11
2 3
4 5
6
8
9
10
1
7 12
13

Cercetarea grafului G
Generarea drumului liber prin conectarea punctelor de mijloc Qj Descompunere trapezoidala
Descompunere trapezoidala
Cinit
Cfinal
11
3 4 5 6
8
9
10
12 13
Q2 Q3 Q4
Q5
Q7
Q9
Q10
Q11
Q13
Q12
Q14
Q1
Q6
Q8
2
Cinitial
Cfinal
Q1
Q2
Q3
Q4
Q5
Q6
Q7
Q8 Q9
Q10
Q1
Q1

11. Descompunere celulara aproximativa Descompunere omogena
Metoda arborelui

12. Metoda câmpului potenţial
SSTTOOPP
SSTTAARRTT
C-Obstacol
Potenţial repulsiv
Potenţial atractiv
C-Obstacol
C-Obstacol

Cfinal
C-obstacol
C-obstacol C-obstacol Cinitial
aF
r
F
r
rF
r
C-obstacol




![Using GPUs for the Boundary Element Method · Boundary Element Method - Matrix Formulation ‣Apply for all boundary elements at 3 Γ j x = x i x 0 x 1 x 2 x 3 x = x i [A] {X } =[B](https://static.fdocument.org/doc/165x107/5fce676661601b3416186b00/using-gpus-for-the-boundary-element-method-boundary-element-method-matrix-formulation.jpg)