WIM Systems Intro
16
1 / 16 ΜΕΤΡΗΣΗ ΒΑΡΟΥΣ ΟΧΗΜΑΤΩΝ ΕΝ ΚΙΝΗΣΕΙ WEIGHT IN MOTION (WIM) Η ανάπτυξη µιας χώρας εξαρτάται πολύ από τις επενδύσεις που γίνονται στην κατασκευή οδικών αξόνων το κόστος των οποίων είναι εξαιρετικά σηµαντικό. Η συλλογή κυκλοφοριακών δεδοµένων αποτελεί αναγκαίο σηµείο αναφοράς για την κατά- σκευή και οµαλή λειτουργία οδικών αξόνων βοηθώντας στο σχεδιασµό νέων, την βελτι- στοποίηση της συντήρησης, την οδική ασφάλεια και τη βελτίωση της κυκλοφοριακής ροής.
-
Upload
panagiotis-anagnostopoulos -
Category
Documents
-
view
17 -
download
3
description
Weigh in Motion Systems (in Greek)
Transcript of WIM Systems Intro
-
1 / 16
WEIGHT IN MOTION (WIM)
.
- , - , .
-
2 / 16
- WIM :
WIM 1,5-2,0 m 50 mm . .
.
, ' .
: 0-150 k : 1 250 km/h. -40 80C
-
3 / 16
WIM Lineas Quartz Kistler
-
4 / 16
-
5 / 16
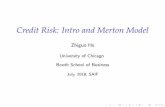
Weigh in Motion by Kistler
Weigh In Motion (WIM) systems are employed at an increasing rate throughout the world for coping with the dramatically rising costs for maintaining the traffic infrastructure, and safety of the road users. Accurate vehicle load data are vital for ensuring that highway systems remain intact and safe.
Continuous overload detection is an important means for restraining overloading operators, often more efficient than punctual enforcement actions. In view of traffic engineering WIM data are useful to improve heavy traffic efficiency by weight-dependent speed or detour route selection, as well as for protection of limited weight bridges and roads. Furthermore, WIM data can be used to predict future traffic volumes for planning and new construction, for the management of maintenance activities, as well as to identify locations or carriers with frequent overloading problems.
Sensors
Kistlers Lineas sensors are piezoelectric force sensors responding only on vertical force. When the force is applied on the top surface of the sensor, quartz crystals produce electric charge proportional to the applied force. The signal is very high impedance electric charge, which is not susceptible to electrical interference.
Lineas sensors are not effected by environmental conditions such as temperature, humidity etc. And they possess very high dynamic range such that weight of a small vehicle is measured as accurately as large overloaded Trucks.
Charge Amplifiers
-
6 / 16
High impedance charge signals are amplified with MOSFET based charge amplifier and converted to voltage output, which is connected to analysis system.
Inductive Loops
Inductive loops define the vehicle entry and exit from the WIM station. These signals are used as triggering inputs to start and stop the measurement to initiate totaling gross vehicle weight of each vehicle. For toll gate or low speed application, inductive loops may be replaced with other types of vehicle sensors such as light curtains, axle sensors or piezocables.
Measurement System
Highly dynamic measurement system from imc Mesysteme GmbH is programmed to perform the calculations of the following parameters:
1. Axle distances
2. Individual axle weights
3. Gross Vehicle Weight
-
7 / 16
4. Vehicle Speed
5. Distance between vehicles
6. GPS synchronized time stamp of measurement for each vehicle
All these parameters are calculated on the device itself and the device is designed to operate without a computer attached to it. The data for each vehicle are stored on the removable Flash drive on the device.
One measurement system can be connected with up to 4 traffic lanes (8 Lineas Sensors and 8 Inductive Loops) simultaneously, and process the data for each lane independently.
The measurement system is environmentally protected and has operating temperature of -20 to +85 C. The measurement systems are also designed to withstand condensation.
Data Archiving
Optionally, a WIM system connected with any available bandwidth can be connected to a central monitoring server. We provide an automatic data archiving software to retrieve the data from many remote WIM stations to be available for any further processing. A central database can be build to link many WIM to a server for variety of monitoring and enforcement purposes.
Features not available elsewhere:
Self-startonce the system acquires power, measurement is started without user intervention.
Extended Temperature & Humidityenables road side installation in extreme humidity conditions.
Remote Operationautomatic data transfer and archiving, making the system completely independent.
Multi-triggeringindependent nested triggers make it possible to calculate each lane data independently from the next.
GPSTime stamp on the data is very important to keep track of the vehicle data with Traffic Camera systems.
Onboard DSPExtremely fast calculations with nested loops make it possible to do the complicated calculations real time as each vehicle pass bywithout Computer at site.
-
8 / 16
WEIGHT IN MOTION (WIM) INTRO
Weigh-in-motion or weighing in motion (WIM) devices are designed to capture and record axle weights and gross vehicle weights as vehicles drive over a measurement site. Unlike static scales, WIM systems are capable of measuring vehicles traveling at a reduced or normal traffic speed and do not require the vehicle to come to a stop. This makes the weighing process more efficient, and, in the case of commercial vehicles, allows for trucks under the weight limit to bypass static scales or inspection.
Road applications
Especially for trucks gross vehicle and axle weight monitoring is useful in an array of applications including:
Pavement design, monitoring, and research
Bridge design, monitoring, and research
Size and weight enforcement
Legislation and regulation
Administration and planning
Weigh in motion scales are often used for size and weight enforcement, such as the Federal Motor Carrier Safety Administration's Commercial Vehicle Information Systems and Networks program. Weigh-in-motion systems can be used as part of traditional roadside inspection stations, or as part of virtual inspection stations.
-
9 / 16
Recent years have seen the rise of several "specialty" Weigh-in-Motion systems. One popular example is the front fork garbage truck scale. In this application, a container is weighed -while it is ful- as the driver lifts, and again -while it is empty- as the container is returned to the ground. The difference between the full and empty weights is equal to the weight of the contents.
System basics
Sensors
WIM systems can employ various types of sensors for measurement. The most important quantity to measure is the vertical force (z component) without any influence of forces in other directions or speed of the vehicle that pass by. Force sensors with quartz crystals are most rigid and measures only one direction along the vertical axis. When the force is applied on the top surface of the sensor, quartz crystals produce electric charge proportional to the applied force. The signal is very high impedance electric charge, which is not susceptible to electrical interference.
Charge amplifiers
High impedance charge signals are amplified with MOSFET based charge amplifier and converted to voltage output, which is connected to analysis system.
Inductive loops
Inductive loops define the vehicle entry and exit from the WIM station. These signals are used as triggering inputs to start and stop the measurement to initiate totaling gross vehicle weight of each vehicle. For toll gate or low speed application, inductive loops may be replaced with other types of vehicle sensors such as light curtains, axle sensors or piezocables.
Measurement system
Highly dynamic measurement system is programmed to perform the calculations of the following parameters:
Axle distances, Individual axle weights, Gross Vehicle Weight, Vehicle Speed, Distance between vehicles, and GPS synchronized time stamp of measurement for each vehicle
The measurement system should be environmentally protected and should have wide operating temperature and withstand condensation.
Communications
Variety of communication methods need to be installed on the measurement system. Modem or Cellular Modem can be provided. If no communication infrastructure exists, WIM system can be self-operating while saving the data, to later physically retrieve it.
Data archiving
A WIM system connected with any available communication means can be connected to a central monitoring server. Automatic data archiving software is required to retrieve the data from many remote WIM stations to be available for any further processing. A central database can be built to link many WIM to a server for variety of monitoring and enforcement purposes.
-
10 / 16
Rail applications
Weighing in motion is also a common application in rail transport. Known applications are:
Infracharging
Asset protection (imbalances, over loading)
Asset management
Maintenance planning
Legislation and regulation
Administration and planning
System basics
There are two main parts to the measurement system: the track-side component, which contains hardware for communication, power, computation, and data acquisition, and the rail-mounted component, which consists of sensors and cabling. Known sensor principles include:
strain gauges: measuring the strain usually in the hub of the rail
fiber optical sensors: measuring a change of light intensity caused by the bending of the rail
load cells: Measuring the strain change in the load cell rather than directly on the rail itself.
laser based systems: measuring the displacement of the rail
Yards and main line
Trains are weighed, either on the main line or at yards. Weighing in Motion systems installed on the main lines measure the complete weight (distribution) of the trains as they pass by at the designated line speed. Weighing in motion on the mainline is therefore also referred to as "coupled-in-motion weighing": all of the railcars are coupled. Weighing in motion at yards often measure individual wagons. It requires that the railcar are uncoupled on both ends in order to weigh. Weighing in motion at yards is therefore also referred to as "uncoupled-in-motion weighing". Systems installed at yards usually works at lower speeds and are capable of higher accuracies.
Air applications
Some airports use airplane weighing, whereby the plane taxis across the scale bed, and its weight is measured. The weight may then be used to correlate with the pilot's log entry, to ensure there is just enough fuel, with a little margin for safety. This has been used for some time to conserve jet fuel.
Also, the main difference in these platforms, which are basically a "transmission of weight" application, there are checkweighers, also known as dynamic scales or in-motion scales.
-
11 / 16
, ( ) . , . , , , .
. , , ( ). ' , :
:
-
12 / 16
(m)
3 5
6 4
9 3
12 3
15 2
2 . , ( ).
, , , .
, ( ). , , 20 , .
.
.
, . , , , , . , ( , , ) ( ) .
-
13 / 16
. , 2/3 . , 1.52.0 m, 1.0 m ( = 1.5 m * 2/3 ).
, . , .
, ( ) . , 2/3 , .
T 6-8 cm . .
6-8 mm. , - 15 mm.
-
14 / 16
, , .
, 1.0 1.5 m . .
1.2 x 1.2 m , , 1.2-1.5 m .
. .
.
-
15 / 16
, , . , 3 .
3 cm .
6-8 cm .
, , .
. , "" . ( 5-7 mm). .
, , 11.5 mm 12.0 mm. , , , . , . 5-7 mm.
( ) , . 11.0 mm ( 3-4 mm).
. XLPE (cross-linked polyethylene) PVC ( 1% PVC).
' 4 Ohms , , ( ).
-
16 / 16
, ( ).
( - ), ( , ) ( ). , , (/ ) . , .