Vibrations and Waves - Classwork 1 - Bartholomew Andrews · Vibrations and Waves (Jan-Feb 2011)...
9
Vibrations and Waves (Jan-Feb 2011) Classwork 1 (18/1/2011) Vibrations and Waves - Classwork 1 The heart of a mechanical watch is the balance — an oscillating wheel of radius R and mass m mounted on a very low friction bearing. A spiral spring (the hairspring) provides a restoring torque τ = -kθ where θ is the angular displacement of the balance wheel from its equilibrium position (θ = 0) and k is a spring constant. This mechanism is known as a “torsional oscillator”. Balance wheel and hairspring assembly from a wristwatch. (i) What are the units of k here? (ii) If the moment of inertia of the balance wheel is I , write down an expression relating the torque on the balance wheel and its angular displacement. Hint: τ = I α, where α is angular acceleration. (All frictional forces can be neglected.) (iii) Hence derive the equation of motion for the balance wheel. (iv) Show that θ(t) = A cos(ω 0 t + φ) and ˜ θ(t) = A exp[ i(ω 0 t + φ)] are both general solutions to the equation of motion, where A, ω 0 and φ are constants. Hence obtain an expression for the natural frequency of the system ω 0 and its period T . (v) What kind of motion do the solutions in (iv) describe? What are the units of A here? (vi) The moment of inertia of the wheel for rotation about its centre is I = mR 2 . The mass of the particular balance wheel shown above is m = 40 mg and its radius is R = 4.5 mm. Determine the spring constant k required to give the required period of 1 / 3 s. (vii) Find the numerical values of A and φ that adapt the general solution θ(t) = A cos(ω 0 t + φ) to the following sets of initial conditions. Assume a value of ω 0 corresponding to a period of 1 / 3 s. (a) Balance wheel is rotated to θ = 4.5 rad (≈ 258 ◦ ) and then released at time t = 0 with zero angular velocity. (b) Balance wheel at equilibrium position is given kick that gives it an initial angular velocity of 35.0 rad/s. (c) Sketch θ(t) versus time, t for the solutions a) and b), clearly showing the amplitude and period of the motion. (viii) For the mass on spring system, we derived in the lectures the following expressions for the potential and kinetic energy PE = 1 2 k[ x(t)] 2 , KE = 1 2 m[v(t)] 2 , where x(t) and v(t) = d x/ dt are the displacement and velocity of the mass, respectively. (a) Using the normal connection between rotational and linear motion (i.e. x ↔ θ and m ↔ I ), derive a general expression for the total energy of the torsional oscillator in terms of k, θ and I . (b) Show that the equation of motion you derived in (iii) can also be obtained from the fact that the total energy is conserved, i.e. it is constant with respect to time. Carl Paterson 1 of 1
Transcript of Vibrations and Waves - Classwork 1 - Bartholomew Andrews · Vibrations and Waves (Jan-Feb 2011)...
Vibrations and Waves (Jan-Feb 2011) Classwork 1 (18/1/2011)
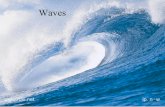
Vibrations and Waves - Classwork 1The heart of a mechanical watch is the balance — an oscillating wheel of radius R and mass mmounted on a very low friction bearing. A spiral spring (the hairspring) provides a restoring torqueτ = −kθ where θ is the angular displacement of the balance wheel from its equilibrium position (θ =0) and k is a spring constant. This mechanism is known as a “torsional oscillator”.
Balance wheel and hairspring assembly from a wristwatch.
(i) What are the units of k here?
(ii) If the moment of inertia of the balance wheel is I, write down an expression relating thetorque on the balance wheel and its angular displacement. Hint: τ = Iα, where α is angularacceleration. (All frictional forces can be neglected.)
(iii) Hence derive the equation of motion for the balance wheel.
(iv) Show that θ(t) = A cos(ω0t + φ) and θ(t) = A exp[ i(ω0t + φ)] are both general solutions to theequation of motion, where A, ω0 and φ are constants. Hence obtain an expression for thenatural frequency of the system ω0 and its period T .
(v) What kind of motion do the solutions in (iv) describe? What are the units of A here?
(vi) The moment of inertia of the wheel for rotation about its centre is I = mR2. The mass of theparticular balance wheel shown above is m = 40 mg and its radius is R = 4.5 mm. Determinethe spring constant k required to give the required period of 1/3s.
(vii) Find the numerical values of A and φ that adapt the general solution θ(t) = A cos(ω0t + φ) tothe following sets of initial conditions. Assume a value of ω0 corresponding to a period of 1/3s.
(a) Balance wheel is rotated to θ = 4.5 rad (≈ 258◦) and then released at time t = 0 with zeroangular velocity.
(b) Balance wheel at equilibrium position is given kick that gives it an initial angular velocityof 35.0 rad/s.
(c) Sketch θ(t) versus time, t for the solutions a) and b), clearly showing the amplitude andperiod of the motion.
(viii) For the mass on spring system, we derived in the lectures the following expressions for thepotential and kinetic energy PE = 1
2 k[x(t)]2, KE = 12 m[v(t)]2, where x(t) and v(t) = dx/ dt are
the displacement and velocity of the mass, respectively.
(a) Using the normal connection between rotational and linear motion (i.e. x ↔ θ andm ↔ I), derive a general expression for the total energy of the torsional oscillator interms of k, θ and I.
(b) Show that the equation of motion you derived in (iii) can also be obtained from the factthat the total energy is conserved, i.e. it is constant with respect to time.
Carl Paterson 1 of 1
Vibrations and Waves (Jan-Feb 2011) Classwork 2
Vibrations and Waves – Classwork 2Twenty students are in a small minibus driving down a road. The driver, a physics student, is tellinghis captive audience that because of its suspension system the minibus can be modelled as adamped oscillator. To prove the point, he drives over a speed bump at considerable speed. Theminibus takes off, and upon landing oscillates violently up and down. The oscillations decay awaywith time. Assume that the mass of each student is 70 kg and the mass of the minibus is 1500 kg.You may use the following:
• Light damping : x(t) = A e−(γ/2)t sin(ω′t + φ)
• Critical damping : x(t) = V0t e−(γ/2)t following impulse with x(0) = 0, v(0) = V0
• Heavy damping : x(t) = V0/(2q) e−(γ/2)t( eqt − e−qt) following impulse with x(0) = 0, v(0) = V0
where ω′ =√ω2
0 − γ2/4, q =√γ2/4 − ω2
0, γ = b/m and ω20 = k/m. All the symbols have their usual
meanings.
NB: You will need to use at least 3 significant figures in your calculations.
(i) What type of oscillation is occurring?
(ii) The minibus oscillates with a period of 1 second. By assuming ω′ ≈ ω0, find an approximatevalue of spring constant of the suspension.
(iii) Write down an expression for the time-dependent amplitude A(t) of the oscillation in terms ofthe mass of the system and the suspension’s damping constant. Assume A(0) = A0.
(iv) Using your answer from (iii), calculate the damping constant given that the initial oscillationamplitude is A0 = 5 cm and that the amplitude has decayed away to 0.1 cm after 10 seconds.
(v) Recalculate k using this value of b.
(vi) Calculate the oscillation period in the undamped case. Hence comment on the approximationω′ ≈ ω0 here.
(vii) What is the total energy E stored in the oscillations initially (t = 0) and after 10 seconds?
(viii) Calculate the time for the energy to decay to 1/ e of its initial value and hence estimate thequality factor using that Q/(2π) is approximately the number of cycles this takes. How doesthis compare with Q = ω0/γ?
The students return to Imperial and get a new minibus with different suspension (different b and k)but the same mass. They drive over the original speed bump again. The minibus oscillates againwith a period of 1 second. However, after 0.75 seconds the oscillation has decayed to 0.01 cm.
(ix) Taking A0 = 5 cm as before, recalculate b
(x) Recalculate k.
(xi) Recalculate Q, using the same method as in (viii). How does this compare with Q = ω0/γ?
The students then notice that the driver is driving the minibus towards another much larger bump inthe road. Some of the students begin to jump out the back of the minibus.
(xii) About how many students need to jump out before the remainder in the minibus will have themost “comfortable” landing?
1

Vibrations and Waves (Jan-Feb 2011) Classwork 3 (31/1/2011)
Vibrations and Waves – Classwork 3This classwork will give you practice in calculating forced oscillations both at resonance and awayfrom resonance.
In the lectures we derived the amplitude A and the phase φ of forced damped harmonic oscillator.They are given by the following expressions:
A =F0/m√
(ω20 − ω2)2 + (ωγ)2
tan φ =−ωγ
(ω20 − ω2)
where the forcing term is given by F0 cos(ωt), γ = b/m, where b is the damping constant, m is themass and ω0 is the natural angular frequency of the system.
(i) Show that the resonant frequency, where the amplitude is maximum, is ωres =
√ω2
0 − γ2/2.
(ii) Hence show that the amplitude of motion at resonance is F0/(bωd), where ωd =
√ω2
0 − γ2/4is the damped frequency for the unforced system. Show that this has dimensions of length, asexpected.
Six penguins each of mass mp = 20 kg sit on top of a block of ice of mass M = 700 kg. The equationof motion of the block of ice in the vertical direction, y(t) = Re[y(t)], with the penguins on it is givenby
(M + 6mp)d2ydt2 + 1200
dydt+ 104y = F0 exp( iωt)
where all quantities are in SI units and the driving force here is exerted by water waves of frequencyω.
(iii) By inspection of the differential equation above, write down the numerical values of the mass,damping constant and spring constant for the system. Calculate the parameters γ and ω0.
(iv) A killer whale tries to knock the penguins off the ice block by creating water waves by splash-ing its tail. With what period, Tres, should the whale splash its tail to produce the maximumdisplacement of the ice block?
(v) The killer whale does this and the ice block is now moving with maximum displacement am-plitude A = 0.244 m. Calculate the force F0. Using the numerical values provided, write downan expression for y(t). What is the phase relationship between the driving force exerted by thewater and motion of the ice block?
(vi) Again using the numerical values provided, write down expression for y(t) assuming that thekiller whale’s tail flaps at 4T res. What is the phase relationship now between the driving forceand the motion of the ice block?
Carl Paterson 1 of 1
Vibrations and Waves (Jan-Feb 2011) Classwork 4 (4/2/2011)
Vibrations and Waves – Classwork 4
1. Which of the following waves (written in vector form, where x, y and z are unit vectors in the x,y and z directions) are transverse waves and which are longitudinal, which are travelling wavesand which are standing waves and in which direction are the travelling waves propagating?
i) ψ(z, t) = Ax cos(ωt − kz)ii) ψ(z, t) = Az cos(ωt) sin(kz)iii) ψ(x, t) = Ax cos(ωt + kx)iv) ψ(z, t) = A1x cos(ωt − kz) + A2z sin(ωt − kz)v) ψ(z, t) = A1x cos(ωt − kz) + A2z cos(ωt + kz)vi) ψ(z, t) = Ax cos(ωt − kz) + Ax cos(ωt + kz)
2. The following waves describe disturbances on stretched strings, where z is distance in metresand t is time in seconds. For each wave, determine the wave amplitude, angular frequency,frequency in Hz, period, wavenumber, wavelength and phase velocity. Ensure you give theunits for each quantity. Now calculate the transverse velocity and transverse acceleration ofthe string for each wave at (z, t) = (0.0, 1.0).
i) ψ(z, t) = 0.2 cos(4πt − z/5)mii) ψ(z, t) = 80 sin[π(t − 10z)]mm
3. The wave equation that governs electrical disturbances on a lossless uniform two-conductorcable such as the cable connecting an aerial (antenna) to a TV set is given by
∂2V∂t2 L0C0 =
∂2V∂y2
where V(y, t) is the potential difference between the conductors, y is the distance along thecable and L0, C0 are the inductance and capacitance per unit length of the cable.
i) What is the speed of voltage waves along the cable in terms of the cable parameters?
ii) How long does it take for a voltage pulse to travel 100 m along a cable with L0 =
0.8 × 10−6 H/m and C0 = 20 × 10−12 F/m.
4. Two stretched strings are joined together at x = 0. String 1 is has 4 times the mass per unitlength as string 2. The tensions in both strings are the same.
i) The wave speed for string 1 is measured to be 5 m s−1. What is the wave speed for string2?
A travelling transverse harmonic wave on string 1 is incident on the boundary between thestrings. In complex form the wave is ψi = Ai e i(ωt−k1 x).
ii) Write down similar expressions for the transmitted and reflected waves.
iii) What are the wavenumbers of the reflected and the transmitted waves?
iv) Both the displacement and its gradient must be continuous at the join (at x = 0). Usethese boundary conditions to write down two equations relating the amplitudes of thethree waves.
v) Hence derive expressions for the amplitude transmission and reflection coefficients interms of the wavenumbers of the waves.
vi) If the amplitude of the incident wave is 0.1m, calculate the amplitudes of the transmittedand reflected waves. Is the reflected wave inverted? What fraction of the power of theincident wave is reflected?
Carl Paterson 1 of 1
Vibrations and Waves (Jan-Feb 2011) Classwork 1 ANSWERS
Vibrations and Waves – Classwork 1 ANSWERS
(i) [k] = [τ/θ] = N m/rad
(ii) τ = Iθ (Compare with F = mx.)
(iii) −kθ = Iθ ⇒ θ + (k/I)θ = 0(Note this is the same as a mass on a spring with m→ I and x→ θ.)
(iv) Differentiating, θ(t) = A cos(ω0t + φ) twice gives θ = −ω20A cos(ω0t + φ). Substituting into the
equation of motion gives
−ω20A cos(ω0t + φ) + (k/m)A cos(ω0t + φ) = 0
Cancelling A cos(ω0t+φ), leaves ω20 = k/I — i.e., trial solution is valid if ω2
0 = k/I. Furthermore,it has two independently adjustable constants as expected for the general solution of a 2nd-order differential equation.
Similarly for θ(t) = A exp( iω0t + φ), differentiating gives ¨θ = −ω20A exp(ω0t + φ). Substituting
into the equation of motion and cancelling yields the same result, ω20 = k/I.
Hence ω0 =√
k/I and T = 2π/ω0 = 2π√
I/k.
(v) Solutions describe SHM. [A] = rad
(vi) From (iv), T = 2π√
I/k. Rearranging and substituting for I gives
k = I4π2
T 2 = mR2 4π2
T 2 =4π2mR2
T 2 =4π2(40× 10−6 kg)(4.5× 10−3 m)2
(1/3s)2 = 2.88× 10−7 Nm/rad
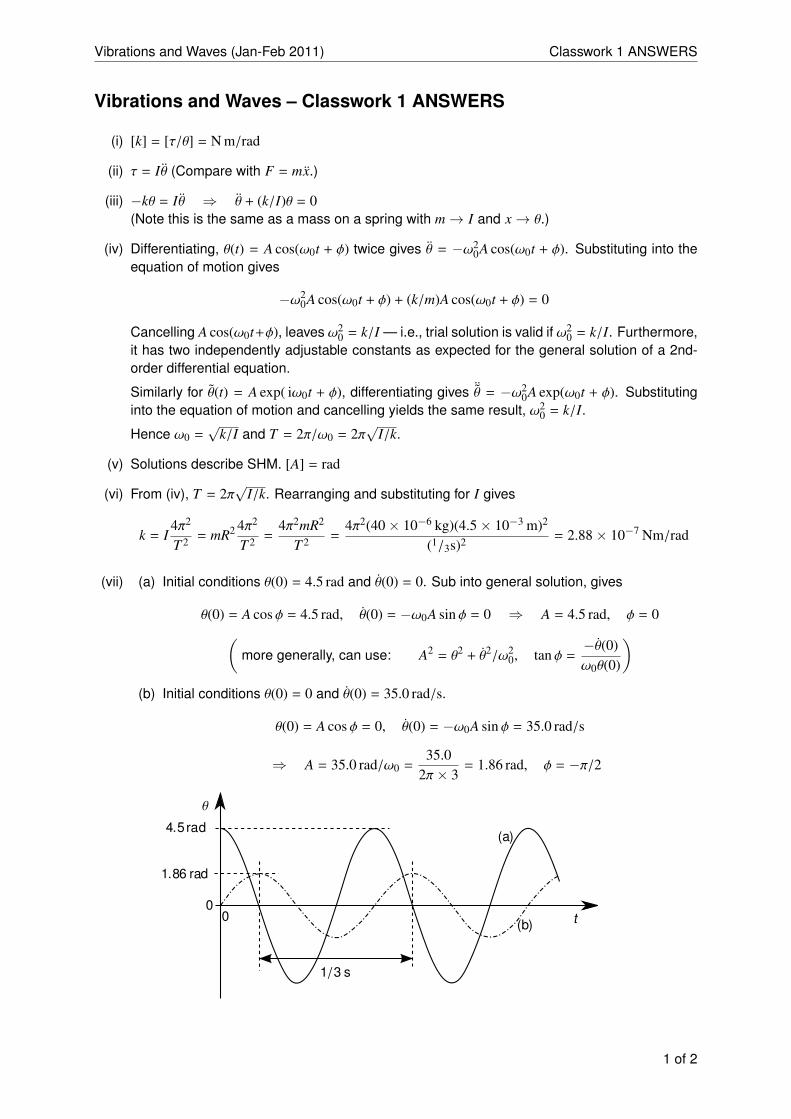
(vii) (a) Initial conditions θ(0) = 4.5 rad and θ(0) = 0. Sub into general solution, gives
θ(0) = A cos φ = 4.5 rad, θ(0) = −ω0A sin φ = 0 ⇒ A = 4.5 rad, φ = 0(more generally, can use: A2 = θ2 + θ2/ω2
0, tan φ =−θ(0)ω0θ(0)
)(b) Initial conditions θ(0) = 0 and θ(0) = 35.0 rad/s.
θ(0) = A cos φ = 0, θ(0) = −ω0A sin φ = 35.0 rad/s
⇒ A = 35.0 rad/ω0 =35.0
2π× 3= 1.86 rad, φ = −π/2
1 of 2

Vibrations and Waves (Jan-Feb 2011) Classwork 1 ANSWERS
(viii) (a) Using x→ θ and m→ I,
PE =12
k[x(t)]2 → PErot =12
k[θ(t)]2
KE =12
m[v(t)]2 → KEang =12
I[θ(t)]2
E = PErot + KEang =12(kθ2 + Iθ2)
(b) Differentiating total energy (TE),
kθθ + Iθθ = 0 ⇒ kθ + Iθ = 0
Carl Paterson 2 of 2

Vibrations and Waves (Jan-Feb 2011) Classwork 2 ANSWERS
Vibrations and Waves – Classwork 2 ANSWERS
(i) Lightly damped SHM.
(ii)ω2
0 = k/m ⇒ k = mω20.
ω0 ≈ ω′ = 2π/T = 2π /s, m = 20× 70 + 1500 kg = 2900 kg ⇒ k = 1.14× 105 N/m
(iii) A(t) = A0 e−b
2m t
(iv) From (iii), b = −2mt
logAA0= −2× 2900 kg
10 slog
0.1 cm5 cm
= 2.27× 103 Ns/m
(v)
ω′ =
√ω2
0 −γ2
4⇒ ω2
0 = ω′2 +
γ2
4⇒ k = m
(ω′2 +
b2
4m2
)= 1.15× 105 N/m
(vi)
T =2πω0= 2π
√mk= 0.998 s
Approximation is v. good.
(vii) E = 12 kA2(t)
E(0) = 0.5× (1.14× 105 N/m)× (5 cm)2 = 144 J,
E(10 s) = 0.5× (1.14× 105 N/m)× (0.1 cm)2 = 5.75× 10−2 J
(viii)
E ∝ e−γt ⇒ t = −1γ
logEE0=
mb⇒ t = 1.28 s
Q ≈ 2πNcycles = 2πtT= ωt = 2π× 1.28 = 8.05
Q =ω0
γ=
√km
(mb
)= 8.01 (i.e., a good approximation)
(ix) Oscillations mean it is still underdamped. b = −2mt
logAA0= 4.81× 104 Ns/m
(x)
k = m(ω′2 +
b2
4m2
)= 3.14× 105 N/m
(xi)
E ∝ e−γt ⇒ t = −1γ
logEE0=
mb= 6.03× 10−2 s
Q ≈ 2πNcycles = 2π× 6.03× 10−21.28 = 0.379
Q =ω0
γ=
√km
(mb
)= 0.627 (i.e., a very poor approximation)
(xii) Require critical damping.
γ2
4= ω2
0 ⇒ m =b2
4k= 1.841× 103 kg
This corresponds to having1.841× 103 − 15000
70= 4.87 students on the bus. i.e., (20-5)=15
students must jump.
1

Vibrations and Waves (Jan-Feb 2011) Classwork 3 (31/1/2011) ANSWERS
Vibrations and Waves – Classwork 3 ANSWERS
(i) To find maximum amplitude, solve dA/ dω = 0 for ω
dAdω= −1
2F0/m[
(ω20 − ω2)2 + ω2γ2
]3/2 [2(ω20 − ω2)(−2ω) + 2ωγ2] = 0
⇒ 2(ω20 − ω2)(−��2ω) +��2ωγ2 = 0 ⇒ ω = ωres =
√ω2
0 −γ2
2
(ii) Substituting ωres into given expression for A gives,
A =F0/m√
(ω20 − ω2
res)2 + (ωresγ)2=
F0/m√(��ω
20 −��ω
20 +
γ2
2
)2+(ω2
0 −γ2
2
)γ2
=F0/m
γ
√ω2
0 −γ2
4
But m/γ = 1/b, and so A = F0/bωd where ωd =
√ω2
0 − γ2/4, as required.
Dimensions (using SI): [A] =[F0]
[b][ωd]=
@N
(@N�s/m)��s−1= m
(iii) m = 820 kg, b = 1200 Ns/m, k = 10 000 N/m
γ = b/m = 1.463 /s ω0 =√
k/m = 3.492 /s
(iv) ωres =
√ω2
0 − γ2/2 = 3.335 /s, Tres = 2π/ωres = 1.88 s
(v) ωd =
√ω2
0 − γ2/4 = 3.415 /s,
F0 = Abωd = 0.244× 1200× 3.415N = 1000 N
tan φ =−ωresγ
(ω20 − ω2
res)⇒ φ = −1.355
y(t) = 0.244 cos(3.335t/s− 1.355)m,
φ = −1.355 = −77.6◦ (motion lags behind force almost by π/2)
(vi) for T = 4Tres, ω = ωres/4. Substitute into A and tan φ to get:
A =F0/m√
(ω20 − ω2)2 + (ωγ)2
= 0.105 m
φ = tan φ =−ωγ
(ω20 − ω2)
⇒ φ = −0.106 = −6.1◦
y(t) = 0.105 cos(0.834t/s− 0.106)m,
Motion lags force by −6.1◦ ( almost in phase.)
Carl Paterson 1 of 1

Vibrations and Waves (Jan-Feb 2011) Classwork 4 (4/2/2011) ANSWERS
Vibrations and Waves – Classwork 4 ANSWERS
1. (i) transverse, travelling +z
(ii) longitudinal, standing
(iii) longitudinal, travelling −x
(iv) transverse and longitudinal components, travelling +z
(v) transverse travelling +z, longitudinal travelling −z
(vi) transverse standing
2. (i) A = 0.2 m, ω = 4π, f = 2 Hz, T = 0.5 s, k = 0.2 /m, λ = 2π/k = 10πm, v = ω/k = 20πm/s
(ii) A = 80 mm, ω = π, f = 0.5 Hz, T = 2 s, k = 10π/m, λ = 2π/k = 0.2 m, v = ω/k = 0.1 m/s
Differentiate w.r.t. t to get transverse velocity and acceleration and sub in z = 0 and t = 1.0:
(i) ψ = −ω sin(ωt − kz) = −(4π)0.2(((((((sin(4π× 1.0)= 0 andψ = −ω2ψ = (4π)20.2cos(4π× 1.0)= −3.2π2m/s2
(ii) ψ = π80 cos(π× 1.0)= −80πmm/s and ψ = −π280((((((sin(π× 1.0)= 0
3. (i) Compare with familiar form∂2V∂y2 =
1v2∂2V∂t2 gives v =
1√L0C0
(ii) t = 100 m/v = 100 m√
L0C0 = 100 m√
0.8× 10−6 H/m× 20× 10−12 F/m = 400 ns
4. (i) v =√
T/µ ⇒ v2/v1 =√µ2/µ1 =
√4 ⇒ v2 = 2v1 = 10 m/s
(ii) Reflected wave: ψr = Ar e i(ωt+k1 x), Transmitted wave: ψt = At e i(ωt−k2 x)
(iii) k = ω/vp so reflected wavenumber is k1; transmitted wavenumber is k2 = k1/2.
(iv) For continuity of the displacement, equate on both sides of the boundary at x = 0,
Ai e iωt + Ar e iωt = At e iωt ⇒ Ai + Ar = At
For continuity of the gradient, differentiate w.r.t. x and equate on both sides of the bound-ary,
k1Ai e iωt − k2Ar e iωt = k2At e iωt ⇒ k1Ai − k1Ar = k2At
(v) Using equations from (iv)
[Ai + Ar = At]× k1 + [k1Ai − k1Ar = k2At]
⇒ 2k1Ai = (k1 + k2)At ⇒ At/Ai = 2k1/(k1 + k2)
[Ai + Ar = At]× k2 − [k1Ai − k1Ar = k2At]
⇒ (k2 − k1)Ai + (k2 + k1)Ar = 0 ⇒ Ar/Ai = (k1 − k2)/(k1 + k2)
(vi) Using k2 = k1/2,
At/Ai = 2/(1 + 1/2) = 4/3 ⇒ At = 4/3× 0.1 m = 0.1333 m
Ar/Ai = (1− 1/2)/(1 + 1/2) = 1/3 ⇒ Ar = 1/3× 0.1 m = 0.0333 m
The reflection coefficient is positive, so the reflected wave is not inverted.Power ∝ A2, so the fraction of the incident power that is reflected is |Ar/Ai|2 = 1/9.
Carl Paterson 1 of 1