Vector Functions: TNB-Frame & Curvature - Calculus IIIJosh Engwer (TTU) Vector Functions: TNB-Frame...
13
Vector Functions: TNB-Frame & Curvature Calculus III Josh Engwer TTU 17 September 2014 Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 1 / 13
Transcript of Vector Functions: TNB-Frame & Curvature - Calculus IIIJosh Engwer (TTU) Vector Functions: TNB-Frame...
Vector Functions: TNB-Frame & CurvatureCalculus III
Josh Engwer
TTU
17 September 2014
Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 1 / 13
Vector Functions (Arc Length)
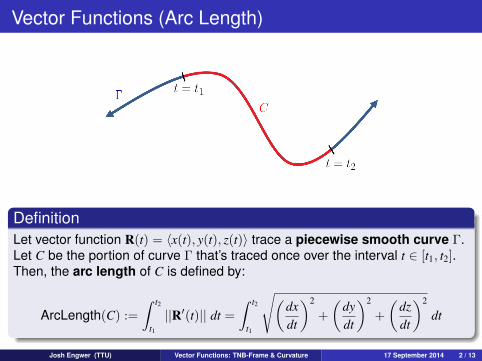
DefinitionLet vector function R(t) = 〈x(t), y(t), z(t)〉 trace a piecewise smooth curve Γ.Let C be the portion of curve Γ that’s traced once over the interval t ∈ [t1, t2].Then, the arc length of C is defined by:
ArcLength(C) :=
∫ t2
t1||R′(t)|| dt =
∫ t2
t1
√(dxdt
)2
+
(dydt
)2
+
(dzdt
)2
dt
Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 2 / 13
TNB-Frame (Definition)
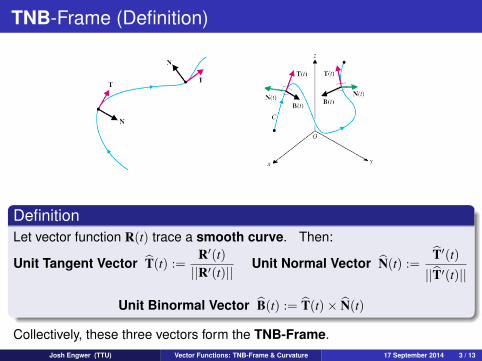
DefinitionLet vector function R(t) trace a smooth curve. Then:
Unit Tangent Vector T̂(t) :=R′(t)||R′(t)||
Unit Normal Vector N̂(t) :=T̂′(t)
||T̂′(t)||
Unit Binormal Vector B̂(t) := T̂(t)× N̂(t)
Collectively, these three vectors form the TNB-Frame.Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 3 / 13
TNB-Frame (Geometric Interpretation)
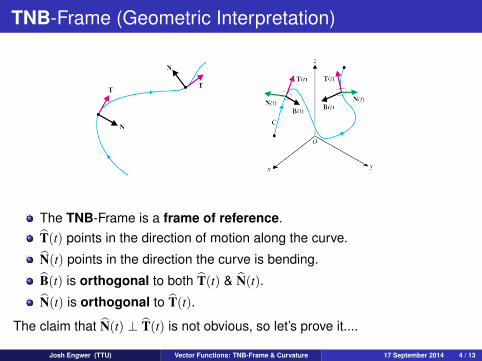
The TNB-Frame is a frame of reference.T̂(t) points in the direction of motion along the curve.
N̂(t) points in the direction the curve is bending.
B̂(t) is orthogonal to both T̂(t) & N̂(t).
N̂(t) is orthogonal to T̂(t).
The claim that N̂(t) ⊥ T̂(t) is not obvious, so let’s prove it....
Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 4 / 13
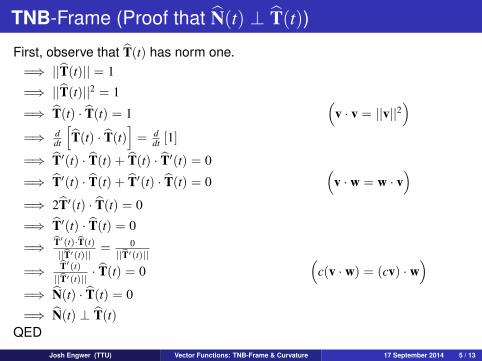
TNB-Frame (Proof that N̂(t) ⊥ T̂(t))
First, observe that T̂(t) has norm one.=⇒ ||T̂(t)|| = 1
=⇒ ||T̂(t)||2 = 1
=⇒ T̂(t) · T̂(t) = 1(
v · v = ||v||2)
=⇒ ddt
[T̂(t) · T̂(t)
]= d
dt [1]
=⇒ T̂′(t) · T̂(t) + T̂(t) · T̂′(t) = 0
=⇒ T̂′(t) · T̂(t) + T̂′(t) · T̂(t) = 0(
v · w = w · v)
=⇒ 2T̂′(t) · T̂(t) = 0
=⇒ T̂′(t) · T̂(t) = 0
=⇒ T̂′(t)·T̂(t)||T̂′(t)||
= 0||T̂′(t)||
=⇒ T̂′(t)||T̂′(t)||
· T̂(t) = 0(
c(v · w) = (cv) · w)
=⇒ N̂(t) · T̂(t) = 0
=⇒ N̂(t) ⊥ T̂(t)QED
Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 5 / 13
TNB-Frame (DEMO)
(DEMO) TNB-Frame (click below):
Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 6 / 13
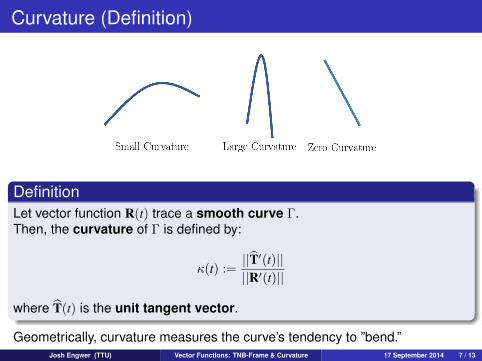
Curvature (Definition)
DefinitionLet vector function R(t) trace a smooth curve Γ.Then, the curvature of Γ is defined by:
κ(t) :=||T̂′(t)||||R′(t)||
where T̂(t) is the unit tangent vector.
Geometrically, curvature measures the curve’s tendency to ”bend.”Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 7 / 13
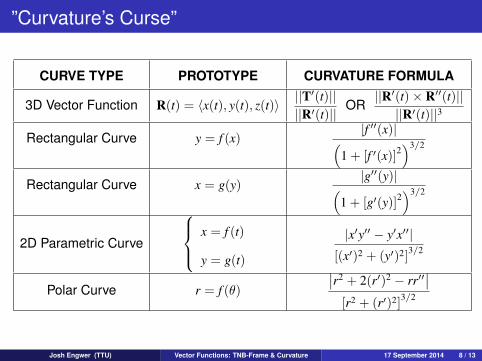
”Curvature’s Curse”
CURVE TYPE PROTOTYPE CURVATURE FORMULA
3D Vector Function R(t) = 〈x(t), y(t), z(t)〉 ||T′(t)||||R′(t)||
OR||R′(t)× R′′(t)||||R′(t)||3
Rectangular Curve y = f (x)|f ′′(x)|(
1 + [f ′(x)]2)3/2
Rectangular Curve x = g(y)|g′′(y)|(
1 + [g′(y)]2)3/2
2D Parametric Curve
x = f (t)
y = g(t)
|x′y′′ − y′x′′|[(x′)2 + (y′)2]
3/2
Polar Curve r = f (θ)
∣∣r2 + 2(r′)2 − rr′′∣∣
[r2 + (r′)2]3/2
Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 8 / 13
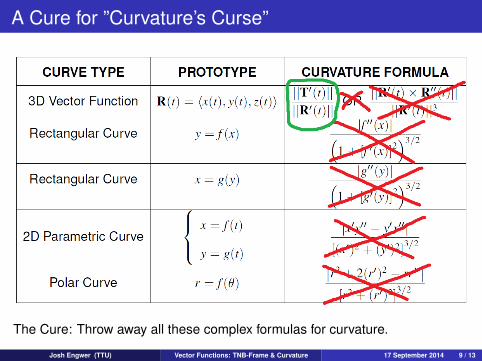
A Cure for ”Curvature’s Curse”
The Cure: Throw away all these complex formulas for curvature.
Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 9 / 13
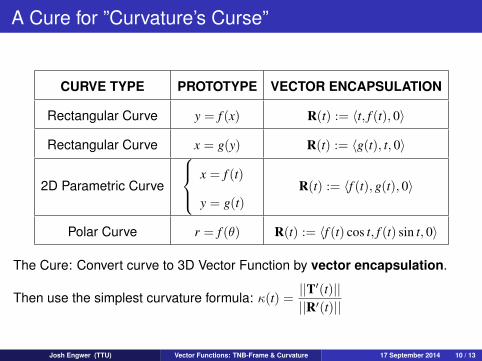
A Cure for ”Curvature’s Curse”
CURVE TYPE PROTOTYPE VECTOR ENCAPSULATION
Rectangular Curve y = f (x) R(t) := 〈t, f (t), 0〉
Rectangular Curve x = g(y) R(t) := 〈g(t), t, 0〉
2D Parametric Curve
x = f (t)
y = g(t)R(t) := 〈f (t), g(t), 0〉
Polar Curve r = f (θ) R(t) := 〈f (t) cos t, f (t) sin t, 0〉
The Cure: Convert curve to 3D Vector Function by vector encapsulation.
Then use the simplest curvature formula: κ(t) =||T′(t)||||R′(t)||
Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 10 / 13
Torsion (Definition)
DefinitionLet vector function R(t) trace a smooth curve Γ.Then, the torsion of Γ is defined by:
τ(t) := −N̂(t) · B̂′(t)
where N̂(t) is the unit normal vector & B̂(t) is the unit binormal vector.
Geometrically, torsion measures the curve’s tendency to ”twist.”Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 11 / 13
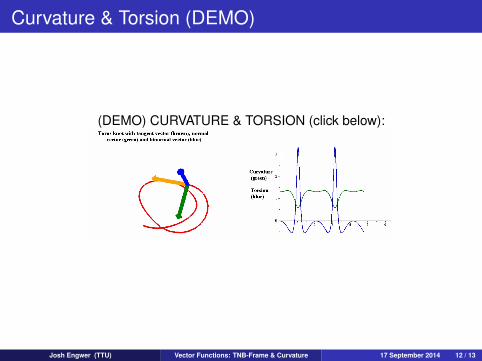
Curvature & Torsion (DEMO)
(DEMO) CURVATURE & TORSION (click below):
Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 12 / 13
Fin
Fin.
Josh Engwer (TTU) Vector Functions: TNB-Frame & Curvature 17 September 2014 13 / 13





![Skinning measures in negative curvature and …When Mis geometrically finite, generalizing (and giving an alternative proof of) The orem 6.4 in [OS2] which assumes the curvature to](https://static.fdocument.org/doc/165x107/5ec6da1bb5317e1c2e497bff/skinning-measures-in-negative-curvature-and-when-mis-geometrically-inite-generalizing.jpg)

![Set 6: Relativitybackground.uchicago.edu/~whu/Courses/Ast305_10/ast305_06.pdf · 2011-12-10 · Special Relativity. x=ct x'=ct' O [unprimed frame] O' [primed frame] v emission at](https://static.fdocument.org/doc/165x107/5ec4fe7fbe92464bde029ce6/set-6-whucoursesast30510ast30506pdf-2011-12-10-special-relativity-xct.jpg)



![CONTINUITY, CURVATURE, AND THE GENERAL · PDF fileCONTINUITY, CURVATURE, AND OPTIMAL TRANSPORTATION 3 [41] [42]. Loeper furthermore offered a direct argument giving an explicit H¨older](https://static.fdocument.org/doc/165x107/5a7991c97f8b9ade698cfe20/continuity-curvature-and-the-general-curvature-and-optimal-transportation.jpg)