Variance reduction for stochastic gradient methods
57
ELE 522: Large-Scale Optimization for Data Science Variance reduction for stochastic gradient methods Yuxin Chen Princeton University, Fall 2019
Transcript of Variance reduction for stochastic gradient methods

ELE 522: Large-Scale Optimization for Data Science
Variance reduction for stochastic gradientmethods
Yuxin ChenPrinceton University, Fall 2019

Outline
• Stochastic variance reduced gradient (SVRG)◦ Convergence analysis for strongly convex problems
• Stochastic recursive gradient algorithm (SARAH)◦ Convergence analysis for nonconvex problems
• Other variance reduced stochastic methods◦ Stochastic dual coordinate ascent (SDCA)
Variance reduction 12-2

Finite-sum optimization
minimizex∈Rd F (x) := 1n
n∑i=1
fi(x)︸ ︷︷ ︸
loss for ith sample︸ ︷︷ ︸(ai,yi)
+ ψ(x)︸ ︷︷ ︸regularizer
common task in machine learning
• linear regression: fi(x) = 12(a>i x− yi)2, ψ(x) = 0
• logistic regression: fi(x) = log(1 + e−yia>i x), ψ(x) = 0
• Lasso: fi(x) = 12(a>i x− yi)2, ψ(x) = λ‖x‖1
• SVM: fi(x) = max{0, 1− yia>i x}, ψ(x) = λ2‖x‖
22
• . . .
Variance reduction 12-3

Stochastic gradient descent (SGD)
Algorithm 12.1 Stochastic gradient descent (SGD)1: for t = 1, 2, . . . do2: pick it ∼ Unif(1, . . . , n)3: xt+1 = xt − ηt∇fit(xt)
As we have shown in the last lecture
• large stepsizes poorly suppress variability of stochastic gradients=⇒ SGD with ηt � 1 tends to oscillate around global mins
• choosing ηt � 1/t mitigates oscillation, but is too conservative
Variance reduction 12-4

Recall: SGD theory with fixed stepsizes
xt+1 = xt − ηt gt
• gt: an unbiased estimate of F (xt)
• E[‖gt‖22] ≤ σ2g + cg‖∇F (xt)‖22
• F (·): µ-strongly convex; L-smooth
From the last lecture, we know
E[F (xt)− F (x∗)] ≤ηLσ2
g2µ + (1− ηµ)t
(F (x0)− F (x∗)
)
Variance reduction 12-5

Recall: SGD theory with fixed stepsizes
E[F (xt)− F (x∗)] ≤ηLσ2
g2µ + (1− ηµ)t
(F (x0)− F (x∗)
)
• vanilla SGD: gt = ∇fit(xt)◦ issue: σ2
g is non-negligible even when xt = x∗
• question: it is possible to design gt with reduced variability σ2g?
Variance reduction 12-6

A simple idea
Imagine we take some vt with E[vt] = 0 and set
gt = ∇fit(xt)− vt
— so gt is still an unbiased estimate of ∇F (xt)
question: how to reduce variability (i.e. E[‖gt‖22] < E[‖∇fit(xt)‖22])?
answer: find some zero-mean vt that is positively correlated with∇fit(xt) (i.e. 〈vt,∇fit(xt)〉 > 0) (why?)
Variance reduction 12-7

Reducing variance via gradient aggregation
If the current iterate is not too far away from previous iterates, thenhistorical gradient info might be useful in producing such a vt toreduce variance
main idea of this lecture: aggregate previous gradient info to helpimprove the convergence rate
Variance reduction 12-8

Stochastic variance reduced gradient (SVRG)

Strongly convex and smooth problems(no regularization)
minimizex∈Rd F (x) = 1n
n∑i=1
fi (x)
• fi: convex and L-smooth
• F : µ-strongly convex
• κ := L/µ: condition number
Variance reduction 12-10

Stochastic variance reduced gradient (SVRG)
— Johnson, Zhang ’13
key idea: if we have access to a history point xold and ∇F (xold),then
∇fit(xt)−∇fit(xold)︸ ︷︷ ︸→0 if xt≈xold
+ ∇F (xold)︸ ︷︷ ︸→0 if xold≈x∗
with it ∼ Unif(1, · · · , n)
• is an unbiased estimate of ∇F (xt)
• converges to 0︸ ︷︷ ︸variability is reduced!
if xt ≈ xold ≈ x∗
Variance reduction 12-11

Stochastic variance reduced gradient (SVRG)
• operate in epochs• in the sth epoch
◦ very beginning: take a snapshot xolds of the current iterate, and
compute the batch gradient ∇F (xolds )
◦ inner loop: use the snapshot point to help reduce variance
xt+1s = xts − η
{∇fit(xts)−∇fit(xold
s ) +∇F (xolds )}
a hybrid approach: the batch gradient is computed only once perepoch
Variance reduction 12-12

SVRG algorithm (Johnson, Zhang ’13)
Algorithm 12.2 SVRG for finite-sum optimization1: for s = 1, 2, . . . do2: xold
s ← xms−1, and compute ∇F (xolds )︸ ︷︷ ︸
batch gradient
// update snapshot
3: initialize x0s ← xold
s
4: for t = 0, . . . ,m− 1︸ ︷︷ ︸each epoch contains m iterations
do
5: choose it uniformly from {1, . . . , n}, and
xt+1s = xts − η
{∇fit(xts)−∇fit(xold
s )︸ ︷︷ ︸stochastic gradient
+∇F (xolds )}
Variance reduction 12-13

Remark
• constant stepsize η• each epoch contains 2m+ n gradient computations
◦ the batch gradient is computed only once every m iterations◦ the average per-iteration cost of SVRG is comparable to that of
SGD if m & n
Variance reduction 12-14

Convergence analysis of SVRG
Theorem 12.1
Assume each fi is convex and L-smooth, and F is µ-strongly convex.Choose m large enough s.t. ρ = 1
µη(1−2Lη)m + 2Lη1−2Lη < 1, then
E[F (xolds )− F (x∗)] ≤ ρs[F (xold
0 )− F (x∗)]
• linear convergence: choosing m & L/µ = κ and constantstepsizes η � 1/L yields 0 < ρ < 1/2
=⇒ O(log 1ε ) epochs to attain ε accuracy
• total computational cost:
(m+ n)︸ ︷︷ ︸# grad computation per epoch
log 1ε �
(n+ κ
)log 1
ε︸ ︷︷ ︸if m�max{n, κ}
Variance reduction 12-15

Convergence analysis of SVRG
Theorem 12.1
Assume each fi is convex and L-smooth, and F is µ-strongly convex.Choose m large enough s.t. ρ = 1
µη(1−2Lη)m + 2Lη1−2Lη < 1, then
E[F (xolds )− F (x∗)] ≤ ρs[F (xold
0 )− F (x∗)]
• linear convergence: choosing m & L/µ = κ and constantstepsizes η � 1/L yields 0 < ρ < 1/2
=⇒ O(log 1ε ) epochs to attain ε accuracy
• total computational cost:
(m+ n)︸ ︷︷ ︸# grad computation per epoch
log 1ε �
(n+ κ
)log 1
ε︸ ︷︷ ︸if m�max{n, κ}
Variance reduction 12-15

Proof of Theorem 12.1
Here, we provide the proof for an alternative version, where in eachepoch,
xolds+1 = xjs with j ∼ Unif(0, · · · ,m− 1)︸ ︷︷ ︸
rather than j=m
(12.1)
The interested reader is referred to Tan et al. ’16 for the proof of theoriginal version
Variance reduction 12-16

Proof of Theorem 12.1
Let gts := ∇fit(xts)−∇fit(xolds ) +∇F (xold
s ) for simplicity. As usual,conditional on everything prior to xt+1
s , one has
E[‖xt+1
s − x∗‖22]
= E[‖xts − ηgts − x∗‖22
]= ‖xts − x∗‖22 − 2η(xts − x∗)>E
[gts]
+ η2E[‖gts‖22
]≤ ‖xts − x∗‖22 − 2η(xts − x∗)> ∇F (xts)︸ ︷︷ ︸
since gts is an unbiased estimate of ∇F (xt
s)
+ η2E[‖gts‖22
]≤ ‖xts − x∗‖22 − 2η(F (xts)− F (x∗))︸ ︷︷ ︸
by convexity
+ η2E[‖gts‖22
](12.2)
• key step: control E[‖gts‖22
]— we’d like to upper bound it via the (relative) objective value
Variance reduction 12-17

Proof of Theorem 12.1
main pillar: control E[‖gts‖22
]via . . .
Lemma 12.2E[‖gts‖22
]≤ 4L
[F (xts)− F (x∗) + F (xold
s )− F (x∗)]
this means if xts ≈ xolds ≈ x∗, then E
[‖gts‖22
]≈ 0 (reduced variance)
this allows one to obtain: conditional on everything prior to xt+1s ,
E[‖xt+1
s − x∗‖22]≤ (12.2)≤ ‖xts − x∗‖22 − 2η[F (xts)− F (x∗)]
+ 4Lη2[F (xts)− F (x∗) + F (xolds )− F (x∗)]
= ‖xts − x∗‖22 − 2η(1− 2Lη)[F (xts)− F (x∗)]+ 4Lη2[F (xold
s )− F (x∗)] (12.3)
Variance reduction 12-18

Proof of Theorem 12.1
main pillar: control E[‖gts‖22
]via . . .
Lemma 12.2E[‖gts‖22
]≤ 4L
[F (xts)− F (x∗) + F (xold
s )− F (x∗)]
this means if xts ≈ xolds ≈ x∗, then E
[‖gts‖22
]≈ 0 (reduced variance)
this allows one to obtain: conditional on everything prior to xt+1s ,
E[‖xt+1
s − x∗‖22]≤ (12.2)≤ ‖xts − x∗‖22 − 2η[F (xts)− F (x∗)]
+ 4Lη2[F (xts)− F (x∗) + F (xolds )− F (x∗)]
= ‖xts − x∗‖22 − 2η(1− 2Lη)[F (xts)− F (x∗)]+ 4Lη2[F (xold
s )− F (x∗)] (12.3)
Variance reduction 12-18

Proof of Theorem 12.1 (cont.)
Taking expectation w.r.t. all history, we have
2η(1− 2Lη)mE[F (xold
s+1)− F (x∗)]
= 2η(1− 2Lη)m−1∑t=0
E[F (xts)− F (x∗)
]by (12.1)
≤ E[‖xms+1 − x∗‖2
2]︸ ︷︷ ︸
≥0
+ 2η(1− 2Lη)m−1∑t=0
E[F (xts)− F (x∗)
]≤ E
[‖x0
s+1 − x∗‖22]
+ 4Lmη2[F (xolds )− F (x∗)] (apply (12.3) recursively)
= E[‖xold
s − x∗‖22]
+ 4Lmη2E[F (xold
s )− F (x∗)]
≤ 2µE[F (xold
s )− F (x∗)]
+ 4Lmη2E[F (xold
s )− F (x∗)]
(strong convexity)
=(
2µ + 4Lmη2
)E[F (xold
s )− F (x∗)]
Variance reduction 12-19

Proof of Theorem 12.1 (cont.)
Consequently,
E[F (xold
s+1)− F (x∗)]
≤2µ + 4Lmη2
2η(1− 2Lη)mE[F (xolds )− F (x∗)]
=(
1µη(1− 2Lη)m + 2Lη
1− 2Lη︸ ︷︷ ︸=ρ
)E[F (xold
s )− F (x∗)]
Applying this bound recursively establishes the theorem.
Variance reduction 12-20

Proof of Lemma 12.2
E[‖∇fit(xts)−∇fit(xold
s ) +∇F (xolds )‖2
2]
= E[‖∇fit(xts)−∇fit(x∗)−
(∇fit(xold
s )−∇fit(x∗)−∇F (xolds ))‖2
2]
≤ 2E[‖∇fit(xts)−∇fit(x∗)‖2
2]
+ 2E[‖∇fit(xold
s )−∇fit(x∗)−∇F (xolds )‖2
2]
= 2E[‖∇fit(xts)−∇fit(x∗)‖2
2]
+ 2E[‖∇fit(xold
s )−∇fit(x∗)− E[∇fit(xolds )−∇fit(x∗)]︸ ︷︷ ︸
since E[∇fit (x∗)]=∇F (x∗)=0
‖22]
≤ 2E[‖∇fit(xts)−∇fit(x∗)‖2
2]
+ 2E[‖∇fit(xold
s )−∇fit(x∗)‖22]
≤ 4L[F (xts)− F (x∗) + F (xolds )− F (x∗)]
where the last inequality would hold if we could justify
1n
n∑i=1
∥∥∇fi(x)−∇fi(x∗)∥∥2
2 ≤ 2L[F (x)− F (x∗)
]︸ ︷︷ ︸
relies on both smoothness and convexity of fi
(12.4)
Variance reduction 12-21

Proof of Lemma 12.2 (cont.)
To establish (12.4), observe from smoothness and convexity of fi that
12L∥∥∇fi(x)−∇fi(x∗)
∥∥22 ≤ fi(x)− fi(x∗)−∇fi(x∗)>(x− x∗)︸ ︷︷ ︸
an equivalent characterization of L-smoothness
Summing over all i and recognizing that ∇F (x∗) = 0 yield
12L
n∑i=1
∥∥∇fi(x)−∇fi(x∗)∥∥2
2 ≤ nF (x)− nF (x∗)− n(∇F (x?)
)>(x− x∗)
= nF (x)− nF (x∗)
as claimed
Variance reduction 12-22

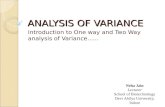
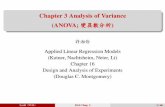
Numerical example: logistic regression
— Johnson, Zhang ’13
1E-12
1E-10
1E-8
1E-6
1E-4
1E-2
0 10 20 30
trai
ning
loss
-op
timum
#grad / n
rcv1 convex
SGD-bestSDCASVRG
0.035
0.04
0.045
0.05
0 10 20 30
Test
err
or r
ate
#grad / n
rcv1 convex
SGD-bestSDCASVRG
1E-6
1E-5
1E-4
1E-3
1E-2
0 10 20 30
trai
ning
loss
-op
timum
#grad / n
protein convex
SGD-bestSDCASVRG
0.002
0.003
0.004
0.005
0.006
0 10 20 30
Test
err
or r
ate
#grad / n
protein convex
SGD-bestSDCASVRG
1E-141E-121E-10
1E-81E-61E-41E-2
0 10 20 30
trai
ning
loss
-op
timum
#grad / n
cover type convex
SGD-bestSDCASVRG
0.24
0.245
0.25
0.255
0.26
0 10 20 30
Test
err
or r
ate
#grad / n
cover type convex
SGD-bestSDCASVRG
1E-121E-101E-081E-061E-041E-021E+00
0 50 100trai
ning
loss
-op
timum
#grad / n
CIFAR10 convex
SGD-bestSDCASVRG
0.58
0.6
0.62
0.64
0.66
0 50 100
Test
err
or r
ate
#grad / n
CIFAR10 convexSGD-bestSDCASVRG
Figure 3: More convex-case results. Loss residual P (w) � P (w⇤) (top) and test error rates (down). L2-regularized logistic regression (10-class for CIFAR-10 and binary for the rest).
0.09
0.095
0.1
0.105
0.11
0 100 200
Trai
ning
loss
#grad / n
MNIST nonconvex
SGD-bestSVRG
1E-5
1E-4
1E-3
1E-2
1E-1
1E+0
0 100 200
Var
ianc
e
#grad / n
MNIST nonconvex
SGD-best/η(t)SGD-bestSVRG
1.4
1.45
1.5
1.55
1.6
0 200 400
Trai
ning
loss
#grad / n
CIFAR10 nonconvexSGD-bestSVRG
0.450.460.470.480.49
0.50.510.52
0 200 400
Test
err
or r
ate
#grad / n
CIFAR10 nonconvexSGD-bestSVRG
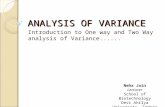
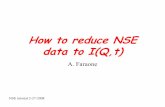
Figure 4: Neural net results (nonconvex).
neural net studies; � was set to 1e-4 and 1e-3, respectively. In Fig. 4 we confirm that the results aresimilar to the convex case; i.e., SVRG reduces the variance and smoothly converges faster than thebest-tuned SGD with learning rate scheduling, which is a de facto standard method for neural nettraining. As said earlier, methods such as SDCA and SAG are not practical for neural nets due totheir memory requirement. We view these results as promising. However, further investigation, inparticular with larger/deeper neural nets for which training cost is a critical issue, is still needed.
6 Conclusion
This paper introduces an explicit variance reduction method for stochastic gradient descent meth-ods. For smooth and strongly convex functions, we prove that this method enjoys the same fastconvergence rate as those of SDCA and SAG. However, our proof is significantly simpler and moreintuitive. Moreover, unlike SDCA or SAG, this method does not require the storage of gradients, andthus is more easily applicable to complex problems such as structured prediction or neural networklearning.
Acknowledgment
We thank Leon Bottou and Alekh Agarwal for spotting a mistake in the original theorem.
8
`2-regularized logistic regression on CIFAR-10
Variance reduction 12-23

Comparisons with GD and SGD
SVRG GD SGDcomp. cost (n+ κ) log 1
ε nκ log 1ε
κ2
ε (practically often κε )
Variance reduction 12-24

Proximal extension
minimizex∈Rd F (x) = 1n
n∑i=1
fi (x) + ψ(x)
• fi: convex and L-smooth
• F : µ-strongly convex
• κ := L/µ: condition number
• ψ: potentially non-smooth
Variance reduction 12-25

Proximal extension (Xiao, Zhang ’14)
Algorithm 12.3 Prox-SVRG for finite-sum optimization1: for s = 1, 2, . . . do2: xold
s ← xms−1, and compute ∇F (xolds )︸ ︷︷ ︸
batch gradient
// update snapshot
3: initialize x0s ← xold
s
4: for t = 0, . . . ,m− 1︸ ︷︷ ︸each epoch contains m iterations
do
5: choose it uniformly from {1, . . . , n}, and
xt+1s = proxηψ
(xts−η
{∇fit(xts)−∇fit(xold
s )︸ ︷︷ ︸stochastic gradient
+∇F (xolds )})
Variance reduction 12-26

Stochastic recursive gradient algorithm(SARAH)

Nonconvex and smooth problems
minimizex∈Rd F (x) = 1n
n∑i=1
fi (x)
• fi: L-smooth, potentially nonconvex
Variance reduction 12-28

Recursive stochastic gradient estimates
— Nguyen, Liu, Scheinberg, Takac ’17
key idea: recursive / adaptive updates of gradient estimates︸ ︷︷ ︸stochastic
gt = ∇fit(xt)−∇fit(xt−1) + gt−1 (12.5)xt+1 = xt − ηgt
comparison to SVRG (use a fixed snapshot point for the entireepoch)
(SVRG) gt = ∇fit(xt)−∇fit(xold) +∇F (xold)
Variance reduction 12-29

Restarting gradient estimate every epoch
For many (e.g. strongly convex) problems, recursive gradient estimategt may decay fast (variance ↓; bias (relative to ∇F (xt)) ↑)
• gt may quickly deviate from the target gradient ∇F (xt)• progress stalls as gt cannot guarantee sufficient descent
solution: reset gt every few iterations to calibrate with the truebatch gradient
Variance reduction 12-30

Bias of gradient estimates
Unlike SVRG, gt is NOT an unbiased estimate of ∇F (xt)
E[gt | everything prior to xts
]= ∇F (xt) −∇F (xt−1) + gt−1︸ ︷︷ ︸
6=0
But if we average out all randomness, we have (exercise!)
E[gt]
= E[∇F (xt)
]
Variance reduction 12-31

StochAstic Recursive grAdient algoritHm
Algorithm 12.4 SARAH (Nguyen et al. ’17)1: for s = 1, 2, . . . , S do2: x0
s ← xm+1s−1 , and compute g0
s = ∇F (x0s)︸ ︷︷ ︸
batch gradient
// restart g anew
3: x1s = x0
s − ηg0s
4: for t = 1, . . . ,m do5: choose it uniformly from {1, . . . , n}6: gts = ∇fit(xts)−∇fit(xt−1
s )︸ ︷︷ ︸stochastic gradient
+ gt−1s
7: xt+1s = xts − ηgts
Variance reduction 12-32

Convergence analysis of SARAH (nonconvex)
Theorem 12.3 (Nguyen et al. ’19)
Suppose each fi is L-smooth. Then SARAH with η . 1L√m
obeys
1(m+ 1)S
S∑s=1
m∑t=0
E[∥∥∇F (xts)∥∥2
2
]≤ 2η(m+ 1)S
[F (x0
0)− F (x∗)]
• iteration complexity for finding ε-approximate stationary point(i.e. ‖∇F (x)‖2 ≤ ε):
O
(n+ L
√n
ε2
)(setting m � n, η � 1
L√m
)
• also derived by Fang et al. ’18 (for a SARAH-like algorithm“Spider”) and improved by Wang et al. ’19 (for “SpiderBoost”)
Variance reduction 12-33

Convergence analysis of SARAH (nonconvex)
Theorem 12.3 (Nguyen et al. ’19)
Suppose each fi is L-smooth. Then SARAH with η . 1L√m
obeys
1(m+ 1)S
S∑s=1
m∑t=0
E[∥∥∇F (xts)∥∥2
2
]≤ 2η(m+ 1)S
[F (x0
0)− F (x∗)]
• iteration complexity for finding ε-approximate stationary point(i.e. ‖∇F (x)‖2 ≤ ε):
O
(n+ L
√n
ε2
)(setting m � n, η � 1
L√m
)
• also derived by Fang et al. ’18 (for a SARAH-like algorithm“Spider”) and improved by Wang et al. ’19 (for “SpiderBoost”)
Variance reduction 12-33

Proof of Theorem 12.3
Theorem 12.3 follows immediately from the following claim on thetotal objective improvement in one epoch (why?)
E[F (xm+1
s )]≤ E
[F (x0
s)]− η
2
m∑t=0
E[∥∥∇F (xts)∥∥2
2]
(12.6)
We will then focus on estalibshing (12.6)
Variance reduction 12-34

Proof of Theorem 12.3 (cont.)
To establish (12.6), recall that the smoothness assumption gives
E[F (xt+1
s )]≤ E
[F (xts)
]− ηE
[∇F (xts)>gts
]+ Lη2
2 E[∥∥gts∥∥2
2
](12.7)
Since gts is not an unbiased estimate of ∇F (xts), we first decouple
2E[∇F (xts)>gts
]= E
[∥∥∇F (xts)∥∥2
2
]︸ ︷︷ ︸desired gradient estimate
+E[∥∥gts∥∥2
2
]︸ ︷︷ ︸variance
− E[∥∥∇F (xts)− gts
∥∥22
]︸ ︷︷ ︸squared bias of gradient estimate
Substitution into (12.7) with straightforward algebra gives
E[F (xt+1
s )]≤ E
[F (xts)
]− η
2E[∥∥∇F (xts)
∥∥22
]+ η
2E[∥∥∇F (xts)− gts
∥∥22
]−(η2 −
Lη2
2
)E[∥∥gts∥∥2
2
]
Variance reduction 12-35

Proof of Theorem 12.3 (cont.)Sum over t = 0, . . . ,m to arrive at
E[F (xm+1
s )]≤ E
[F (x0
s)]− η
2∑m
t=0E[∥∥∇F (xts)
∥∥22
]+ η
2
{∑m
t=0E[∥∥∇F (xts)− gts
∥∥22
]− (1− Lη)︸ ︷︷ ︸
≥1/2
∑m
t=0E[∥∥gts∥∥2
2
]}The proof of (12.6) is thus complete if we can justify
Lemma 12.4
If η ≤ 1L√m
, then (for fixed η, the epoch length m cannot be too large)∑m
t=0E[∥∥∇F (xts)− gts
∥∥22
]︸ ︷︷ ︸
squared bias of gradient estimate
≤ 12
∑m
t=0E[∥∥gts∥∥2
2
]︸ ︷︷ ︸
variance
• informally, this says the accumulated squared bias of gradient estimates(w.r.t. batch gradients) can be controlled by the accumulated variance
Variance reduction 12-36

Proof of Lemma 12.4
Key step:
Lemma 12.5
E[∥∥∇F (xts)− gts
∥∥22
]≤∑t
k=1E[∥∥gks − gk−1
s
∥∥22
]
• convert the bias of gradient estimates to the differences ofconsecutive gradient estimates (a consequence of the smoothnessand the recursive formula of gts)
Variance reduction 12-37

Proof of Lemma 12.4 (cont.)
From Lemma 12.5, it suffices to connect {‖gts − gt−1s ‖2} with {‖gts‖2}:∥∥gts − gt−1
s
∥∥22
(12.5)=∥∥∇fit(xts)−∇fit(xt−1
s
)∥∥22
smoothness≤ L2∥∥xts − xt−1
s
∥∥22
= η2L2∥∥gt−1s
∥∥22
Invoking Lemma 12.5 then gives
E[∥∥∇F (xts)− gts
∥∥22
]≤∑t
k=1E[∥∥gks − gk−1
s
∥∥22
]≤ η2L2
∑t
k=1E[∥∥gk−1
s
∥∥22
]Summing over t = 0, · · · ,m, we obtain∑m
t=0E[∥∥∇F (xts)− gts
∥∥22
]≤ η2L2m
∑m−1
t=0E[∥∥gts∥∥2
2
]which establishes Lemma 12.4 if η . 1
L√m
Variance reduction 12-38

Proof of Lemma 12.5Since this lemma only concerns a single epoch, we shall drop the dependencyon s for simplicity. Let Fk contain all info up to xk and gk−1, thenE[∥∥∇F (xk)− gk
∥∥22| Fk
]= E[∥∥∇F (xk−1)− gk−1 +
(∇F (xk)−∇F (xk−1)
)−(gk − gk−1)∥∥2
2| Fk
]=∥∥∇F (xk−1)− gk−1∥∥2
2+∥∥∇F (xk)−∇F (xk−1)
∥∥22
+ E[∥∥gk − gk−1∥∥2
2| Fk
]+ 2⟨∇F (xk−1)− gk−1,∇F (xk)−∇F (xk−1)
⟩− 2⟨∇F (xk−1)− gk−1,E
[gk − gk−1 | Fk
]⟩− 2⟨∇F (xk)−∇F (xk−1),E
[gk − gk−1 | Fk
]⟩(exercise)=
∥∥∇F (xk−1)− gk−1∥∥22−∥∥∇F (xk)−∇F (xk−1)
∥∥22
+ E[∥∥gk − gk−1∥∥2
2| Fk
]Since ∇F (x0) = g0. Sum over k = 1, . . . , t to obtain
E[∥∥∇F (xk)− gk
∥∥22
]=
t∑k=1
E[∥∥gk − gk−1∥∥2
2
]−
t∑k=1
∥∥∇F (xk)−∇F (xk−1)∥∥2
2︸ ︷︷ ︸≤0; done!
Variance reduction 12-39

Stochastic dual coordinate ascent (SDCA)— a dual perspective

A class of finite-sum optimization
minimizex∈Rd F (x) = 1n
n∑i=1
fi(x) + µ
2 ‖x‖22 (12.8)
• fi: convex and L-smooth
Variance reduction 12-41

Dual formulation
The dual problem of (12.8)
maximizev D (ν) = 1n
n∑i=1−f∗i (−vi)−
µ
2
∥∥∥∥∥ 1µn
n∑i=1νi
∥∥∥∥∥2
2(12.9)
• a primal-dual relation
x(ν) = 1µn
n∑i=1νi (12.10)
Variance reduction 12-42

Derivation of the dual formulation
minx
1n
n∑i=1
fi(x) + µ
2 ‖x‖22
⇐⇒ minx,{zi}
1n
n∑i=1
fi(zi) + µ
2 ‖x‖22 s.t. zi = x
⇐⇒ max{νi}
minx,{zi}
1n
n∑i=1
fi(zi) + µ
2 ‖x‖22 + 1
n
n∑i=1〈νi, zi − x〉︸ ︷︷ ︸
Lagrangian
⇐⇒ max{νi}
minx
1n
n∑i=1−f∗i (−νi)︸ ︷︷ ︸
conjugate: f∗i
(ν):=maxz{〈ν,z〉−fi(z)}
+ µ
2 ‖x‖22 −
1n
n∑i=1〈νi,x〉
⇐⇒ max{νi}
1n
n∑i=1−f∗i (−νi)−
µ
2
∥∥∥ 1µn
n∑i=1
νi︸ ︷︷ ︸optimal x= 1
µn
∑iνi
∥∥∥2
2
Variance reduction 12-43

Randomized coordinate ascent on dual problem
— Shalev-Shwartz, Zhang ’13
• randomized coordinate ascent: at each iteration, randomlypick one dual (block) coordinate νit of (12.9) to optimize
• maintain the primal-dual relation (12.10)
xt = 1µn
n∑i=1νti (12.11)
Variance reduction 12-44

Stochastic dual coordinate ascent (SDCA)
Algorithm 12.5 SDCA for finite-sum optimization1: initialize x0 = 1
µn
∑ni=1 ν
0i
2: for t = 0, 1, . . . do3: // choose a random coordinate to optimize4: choose it uniformly from {1, . . . , n}5: ∆t ← arg max
∆− 1nf∗it
(− νtit −∆
)− µ
2∥∥xt + 1
µn∆∥∥2
2︸ ︷︷ ︸find the optimal step with all {νt
i}i:i 6=itfixed
6: νt+1i ← νti + ∆t 1{i = it}︸ ︷︷ ︸
update only the itht coordinate
(1 ≤ i ≤ n)
7: xt+1 ← xt + 1µn∆t // based on (12.11)
Variance reduction 12-45

A variant of SDCA without duality
SDCA might not be applicable if the conjugate functions are difficultto evaluate
This calls for a dual-free version of SDCA
Variance reduction 12-46

A variant of SDCA without duality
— S. Shalev-Shwartz ’16
Algorithm 12.6 SDCA without duality1: initialize x0 = 1
µn
∑ni=1 ν
0i
2: for t = 0, 1, . . . do3: // choose a random coordinate to optimize4: choose it uniformly from {1, . . . , n}5: ∆t ← −ηµn
(∇fit
(xt)
+ νtit)
6: νt+1i ← νti + ∆t 1{i = it}︸ ︷︷ ︸
update only the itht coordinate
(1 ≤ i ≤ n)
7: xt+1 ← xt + 1µn∆t // based on (12.11)
Variance reduction 12-46

A variant of SDCA without duality
A little intuition
• the optimality condition requires (check!)
ν∗i = −∇fi(x∗), ∀i (12.12)
• with a modified update rule, one has
νt+1it← (1− ηµn)νtit + ηµn
(−∇fit
(xt))︸ ︷︷ ︸
cvx combination of current dual iterate and gradient component
— when it converges, it will satisfy (12.12)
Variance reduction 12-47

SDCA as SGD
The SDCA (without duality) update rule reads:
xt+1 = xt − η(∇fit(xt) + νtit︸ ︷︷ ︸ )
:=gt
It is straightforward to verify that gt is an unbiased gradient estimate
E[gt]
= E[∇fit(xt)
]+ E
[νtit]
= 1n
n∑i=1∇fi(xt) + 1
n
n∑i=1νti︸ ︷︷ ︸
=µxt
= ∇F (xt)
The variance of ‖gt‖2 goes to 0 as we converge to the optimizer
E[‖gt‖22] = E[‖νtit − ν
∗it + ν∗it +∇fit(xt)‖22
]≤ 2E
[‖νtit − ν
∗it‖
22]︸ ︷︷ ︸
→ 0 as t→∞
+ 2 E[‖ν∗it +∇fit(xt)‖22
]︸ ︷︷ ︸≤‖wt−w∗‖2
2 (Shalev-Shwartz ’16)
Variance reduction 12-48

SDCA as variance-reduced SGD
The SDCA (without duality) update rule reads:
xt+1 = xt − η(∇fit(xt) + νtit︸ ︷︷ ︸ )
:=gt
It is straightforward to verify that gt is an unbiased gradient estimate
E[gt]
= E[∇fit(xt)
]+ E
[νtit]
= 1n
n∑i=1∇fi(xt) + 1
n
n∑i=1νti︸ ︷︷ ︸
=µxt
= ∇F (xt)
The variance of ‖gt‖2 goes to 0 as we converge to the optimizer
E[‖gt‖22] = E[‖νtit − ν
∗it + ν∗it +∇fit(xt)‖22
]≤ 2E
[‖νtit − ν
∗it‖
22]︸ ︷︷ ︸
→ 0 as t→∞
+ 2 E[‖ν∗it +∇fit(xt)‖22
]︸ ︷︷ ︸≤‖wt−w∗‖2
2 (Shalev-Shwartz ’16)
Variance reduction 12-48

Convergence guarantees of SDCA
Theorem 12.6 (informal, Shalev-Shwartz ’16)
Assume each fi is convex and L-smooth, and set η = 1L+µn . Then it
takes SDCA (without duality) O((n+ L
µ
)log 1
ε
)iterations to yield ε
accuracy
• the same computational complexity as SVRG
• storage complexity: O(nd) (needs to store {νi}1≤i≤n)
Variance reduction 12-49

Reference
[1] ”Recent advances in stochastic convex and non-convex optimization,”Z. Allen-Zhu, ICML Tutorial, 2017.
[2] ”Accelerating stochastic gradient descent using predictive variancereduction,” R. Johnson, T. Zhang, NIPS, 2013.
[3] ”Barzilai-Borwein step size for stochastic gradient descent,” C. Tan,S. Ma, Y.H. Dai, Y. Qian, NIPS, 2016.
[4] ”A proximal stochastic gradient method with progressive variancereduction,” L. Xiao, T. Zhang, SIAM Journal on Optimization, 2014.
[5] ”Minimizing finite sums with the stochastic average gradient,”M. Schmidt, N. Le Roux, F. Bach, Mathematical Programming, 2013.
[6] ”SAGA: A fast incremental gradient method with support fornon-strongly convex composite objectives,” A. Defazio, F. Bach, andS. Lacoste-Julien, NIPS, 2014.
Variance reduction 12-50

Reference
[7] ”Variance reduction for faster non-convex optimization,” Z. Allen-Zhu,E. Hazan, ICML, 2016.
[8] ”Katyusha: The first direct acceleration of stochastic gradientmethods,” Z. Allen-Zhu, STOC, 2017.
[9] ”SARAH: A novel method for machine learning problems usingstochastic recursive gradient,” L. Nguyen, J. Liu, K. Scheinberg,M. Takac, ICML, 2017.
[10] ”Spider: Near-optimal non-convex optimization via stochasticpath-integrated differential estimator,” C. Fang, C. Li, Z. Lin, T. Zhang,NIPS, 2018.
[11] ”SpiderBoost and momentum: Faster variance reduction algorithms,”Z. Wang, K. Ji, Y. Zhou, Y. Liang, V. Tarokh, NIPS, 2019.
Variance reduction 12-51

Reference
[12] ”Optimal finite-Sum smooth non-convex optimization with SARAH,”L. Nguyen, M. vanDijk, D. Phan, P. Nguyen, T. Weng, J. Kalagnanam,arXiv:1901.07648, 2019.
[13] ”Stochastic dual coordinate ascent methods for regularized lossminimization,” S. Shalev-Shwartz, T. Zhang, Journal of MachineLearning Research, 2013.
[14] ”SDCA without duality, regularization, and individual convexity,”S. Shalev-Shwartz, ICML, 2016.
[15] ”Optimization methods for large-scale machine learning,” L. Bottou,F. Curtis, J. Nocedal, 2016.
Variance reduction 12-52