Validation of an 8-14 μm cloud monitor using visual observations of antarctic cloud cover
8
Validation of an 8 –14 m cloud monitor using visual observations of antarctic cloud cover Michael P. McCarthy, G. Hernandez, Anthony Mactutis, and John A. Moore A cloud monitor instrument, sensing 8–14 m infrared radiation, has been installed near McMurdo, Antarctica, in order to provide supporting cloud cover information for a high-resolution sky-viewing Fabry–Perot spectrometer experiment. Validation of the cloud monitor observations was performed by a 1 year long comparison with the available 6 h visual cloud observations, expressed in octas (obscured eighths of the sky). The agreement between visual observations and those of the cloud monitor is good—the variation being slightly over one step, or octa— except at the clear sky extreme, which the subjective visual observations tend to overestimate during dark and moonless conditions. Both visual observations and the cloud monitor measurements show an austral winter–summer difference with the winter being clearer. © 2007 Optical Society of America OCIS codes: 010.1320, 010.3920, 040.3060. 1. Introduction The presence of clouds in the field of view of our high- resolution optical spectrometer leads to attenuation of the signal, as well as dilution of the desired signal with scattered light originating from other parts of the sky. Thus, clouds spoil the desired measurements. There- fore, knowledge of the cloud cover, where the obser- vations are made, is necessary before analysis and interpretation of the measurements is carried out. Cloud information, that is, a cloud monitor tailored to our specific directions of observations and field of view, is a requirement for the success of the experiment. This is particularly applicable to our coastal Antarctica location at Arrival Heights, near McMurdo Station (78° S), with its widely variable weather. At this loca- tion, the only routinely available cloud information is the standard synoptic visual full-hemisphere meteoro- logical weather observation, which is performed every 6 h. These visual observations do not meet the time and spatial resolution requirements for our upper at- mosphere measurements. For completeness, our antarctic upper atmosphere high-resolution experiments 1,2 involve Doppler width and line-of-sight Doppler wind measurements. The latter are best made low in the sky since, for upper atmospheric winds blowing horizontally, the ob- served Doppler shift is larger when the observing direction is closer to the horizon. The zenith direction is also sampled to provide a zero reference for Doppler shift. The sky area of observation for this experiment is small, near 2° field of view, and the measurements require less than 4 min of observation for each view- ing direction, in order to attain a suitable signal-to- noise ratio. The cloud monitor measures infrared sky radiation, which is not obviously equivalent to cloud presence, especially in the less familiar antarctic region. For the cloud monitor to meet its design objective, it is neces- sary to validate its cloud monitoring function. The only available cloud cover data for comparison are the commonly made visual synoptic meteorological ob- servations. Hence, we were motivated to validate the cloud monitor using visual cloud-cover observa- tions. In these meteorological surface observations, a trained observer codes the fraction of the sky cov- ered by clouds, at any altitude, in eighths of the sky, called octas. 3 The code ranges from 0 (clear) to 8 (com- plete overcast), with a value of 9 reserved for restricted visibility conditions such as fog or blowing snow. Sub- jectivity in this measurement enters through the ob- server’s estimate of covered sky fraction and through a M. P. McCarthy ([email protected]) and G. Hernan- dez are with the Department of Earth and Space Sciences, A. Mactutis is with the Department of Electrical Engineering, and J. A. Moore is with the Department of Aeronautics and Astronau- tics, University of Washington, Box 351310, Seattle, Washington 98195, USA. Received 20 June 2006; revised 29 November 2006; accepted 30 November 2006; posted 1 December 2006 (Doc. ID 72157); pub- lished 20 March 2007. 0003-6935/07/112091-08$15.00/0 © 2007 Optical Society of America 10 April 2007 Vol. 46, No. 11 APPLIED OPTICS 2091
Transcript of Validation of an 8-14 μm cloud monitor using visual observations of antarctic cloud cover

Validation of an 8–14 �m cloud monitor using visualobservations of antarctic cloud cover
Michael P. McCarthy, G. Hernandez, Anthony Mactutis, and John A. Moore
A cloud monitor instrument, sensing 8–14 �m infrared radiation, has been installed near McMurdo,Antarctica, in order to provide supporting cloud cover information for a high-resolution sky-viewingFabry–Perot spectrometer experiment. Validation of the cloud monitor observations was performed by a1 year long comparison with the available 6 h visual cloud observations, expressed in octas (obscuredeighths of the sky). The agreement between visual observations and those of the cloud monitor isgood—the variation being slightly over one step, or octa—except at the clear sky extreme, which thesubjective visual observations tend to overestimate during dark and moonless conditions. Both visualobservations and the cloud monitor measurements show an austral winter–summer difference with thewinter being clearer. © 2007 Optical Society of America
OCIS codes: 010.1320, 010.3920, 040.3060.
1. Introduction
The presence of clouds in the field of view of our high-resolution optical spectrometer leads to attenuation ofthe signal, as well as dilution of the desired signal withscattered light originating from other parts of the sky.Thus, clouds spoil the desired measurements. There-fore, knowledge of the cloud cover, where the obser-vations are made, is necessary before analysis andinterpretation of the measurements is carried out.Cloud information, that is, a cloud monitor tailored toour specific directions of observations and field of view,is a requirement for the success of the experiment.This is particularly applicable to our coastal Antarcticalocation at Arrival Heights, near McMurdo Station(78° S), with its widely variable weather. At this loca-tion, the only routinely available cloud information isthe standard synoptic visual full-hemisphere meteoro-logical weather observation, which is performed every6 h. These visual observations do not meet the time
and spatial resolution requirements for our upper at-mosphere measurements.
For completeness, our antarctic upper atmospherehigh-resolution experiments1,2 involve Doppler widthand line-of-sight Doppler wind measurements. Thelatter are best made low in the sky since, for upperatmospheric winds blowing horizontally, the ob-served Doppler shift is larger when the observingdirection is closer to the horizon. The zenith directionis also sampled to provide a zero reference for Dopplershift. The sky area of observation for this experimentis small, near 2° field of view, and the measurementsrequire less than 4 min of observation for each view-ing direction, in order to attain a suitable signal-to-noise ratio.
The cloud monitor measures infrared sky radiation,which is not obviously equivalent to cloud presence,especially in the less familiar antarctic region. For thecloud monitor to meet its design objective, it is neces-sary to validate its cloud monitoring function. The onlyavailable cloud cover data for comparison are thecommonly made visual synoptic meteorological ob-servations. Hence, we were motivated to validatethe cloud monitor using visual cloud-cover observa-tions. In these meteorological surface observations,a trained observer codes the fraction of the sky cov-ered by clouds, at any altitude, in eighths of the sky,called octas.3 The code ranges from 0 (clear) to 8 (com-plete overcast), with a value of 9 reserved for restrictedvisibility conditions such as fog or blowing snow. Sub-jectivity in this measurement enters through the ob-server’s estimate of covered sky fraction and through a
M. P. McCarthy ([email protected]) and G. Hernan-dez are with the Department of Earth and Space Sciences, A.Mactutis is with the Department of Electrical Engineering, andJ. A. Moore is with the Department of Aeronautics and Astronau-tics, University of Washington, Box 351310, Seattle, Washington98195, USA.
Received 20 June 2006; revised 29 November 2006; accepted 30November 2006; posted 1 December 2006 (Doc. ID 72157); pub-lished 20 March 2007.
0003-6935/07/112091-08$15.00/0© 2007 Optical Society of America
10 April 2007 � Vol. 46, No. 11 � APPLIED OPTICS 2091

determination of what constitutes obscuration by cloudcover. Determining visual nighttime cloud cover isparticularly difficult and unreliable due to the lowcontrast of thin clouds, presence of aurora at highlatitudes, etc. For example, nighttime cloud cover atthe South Pole appears to have been significantlyunderreported4,5 while, at the same time, moonlighthas been shown to also be an important variable inthe accuracy of nighttime cloud cover estimation atthe South Pole.6
Quantitative cloud cover determinations have beenmade possible since it was demonstrated that the pres-ence of clouds increases the sky radiative emission inthe thermal 8–14 �m region when compared with thebackground clear sky.7 Cloud-cover measurements,using the enhanced emission near 10 �m, have beenattempted previously, with several reports of successin methods that sense this infrared radiation.8 As amore recent example, the Atmospheric RadiationMonitor (ARM) program9 includes several instru-ments that measure downward infrared radiationand from which cloud-cover data can be obtained. TheAtmospheric Emitted Radiance Interferometer10,11 ob-tains 3–20 �m differential spectral irradiance whileviewing a vertical column of atmosphere. These mea-surements, when combined with an atmospheremodel, can be processed into cloud-layer information,temperature, and other variables over that column. Amore recent ARM program instrument is the infraredthermometer (IRT),12 which measures downward ir-radiance in the band of 9.6–11.5 �m. IRT incorpo-rates a commercial pyrometer (Heitronics modelKT19.85II), which compares an internal referenceblackbody with the sky measurements and gives asky temperature as a result.
Cloud-cover investigations themselves play a cen-tral role in the study of the Earth’s radiation balance.Successful global climate models must incorporateaccurate information about the presence and effectsof cloud cover upon radiation transport through theatmosphere over the Earth’s surface, including theless-studied polar regions. This need has stimulatedcontemporary research, such as the ARM program, toboth quantify and understand cloud effects.
In the following sections, a cloud monitor designedfor operation at Antarctica, its operation, results andvalidation with the subjective meteorological visualobservations, as well as findings about the local cloudcover, will be presented.
2. Instrument
Because of the combination of the hostile antarcticclimate and the unmanned operation of the cloudmonitor, the design for such a rugged and low-powercloud monitor precludes the use of moving parts. Inaddition, the design must meet the temperature spec-ifications of its components in the cold environment.Finally, our experimental needs require a time reso-lution better than 4 min, as well as having cloudobservations in the same directions and with a field ofview similar to that of the Fabry–Perot spectrometer.We have adopted the use of a filtered thermopile
sensor8 because it meets the design parameters ofreliability, has no moving parts, and operates at lowpower.
The instrument proper consists of nine sensorunits, each viewing a 5° full-angle cone. It is worthnoting that the total sky coverage of these units is�1% of the full sky. The field of view for each unit isachieved by the use of a polyethylene Fresnel lens,which does the double duty of focusing the sky onthe sensor and sealing the sensor units from outsideinfluences. The operational wavelength range of8–14 �m is selected by a coated silicon window cov-ering the thermopile sensor case. As mentioned ear-lier, this wavelength range has been shown to beuseful for determining cloud cover.7,8 Heating thethermopile sensors to a constant temperature pre-vents both ice formation and rime buildup at thesensor unit apertures, while maintaining the thermo-pile within its operational temperature range. As willbe discussed later, the effects of heating the thermo-pile must be taken into account in the reduction of themeasurements.
Eight sensor units view 20° above the horizon in thecompass directions N, NE, E, SE, S, SW, W, and NW,while the ninth unit views the zenith. Each sensor unitcontains a thermopile, a gain stage, an analog-to-digital converter, and a microcontroller, which trans-mits data packets over a dedicated RS-232 serial linkto a networked computer located inside the observa-tory. Each microcontroller also keeps its associatedthermopile sensor at a known constant temperature,while measuring, every 10 s, a voltage proportional tothe net power reaching the thermopile.
The completed nine-sensor cloud monitor was in-stalled in January 2003 on the roof of Arrival HeightsObservatory near McMurdo Station, Antarctica. Thesystem has been running continuously and unat-tended since its installation. The system is checkedand maintained, as needed, during our short yearlyvisit to the field site. As previously discussed, themain purpose of the cloud monitor is to provide cloud-cover information specific to the look directions of theFabry–Perot spectrometer at a higher sampling ratethan is available from the 6 h meteorological obser-vations.
In Section 3, we provide a description of how theraw data from the cloud monitor are processed, withexamples of these data, and a comparison of thesemeasurements with the visual observed cloud coveras a validation of our cloud monitor. Section 4 sum-marizes the results of the validation comparisons anddiscusses the practical usefulness of the device andapplications beyond its intended purpose.
3. Measurements
A. Radiation Balance
The desired measurement from the cloud monitor is ameasure of the presence in the sky of macroscopicwater particles radiating thermally at the tempera-ture where these clouds exist. This thermal radiationis distinguishably hotter than the background sky.7
2092 APPLIED OPTICS � Vol. 46, No. 11 � 10 April 2007

This is the information we desire to extract from thethermopile’s net flux measurement. The thermopilesensor produces an output voltage proportional to thenet radiant power. This net radiant power at the ther-mopile, Pnet, is due to radiation exchange with objectsat temperatures different from that of the thermo-pile. Four radiation terms contribute to the totalpower. Radiation leaves the thermopile �Pdet� throughthe silicon infrared filter at the thermopile deviceaperture. Radiation from the sky �Psky�, the quantitywe want to know, is collected by a lens and thenpasses to the thermopile. The lens, which also ab-sorbs slightly in its passband, emits radiation �Plens�to the thermopile. Finally, there is radiation from thelens mount �Pmnt�, materials around the rim of thelens, to the thermopile. The preceding statements aresummarized by the following equation:
Pnet � Psky � Plens � Pmnt � Pdet. (1)
To proceed, we assume the sky, lens mount, andthermopile radiate as blackbodies, whose radiatedflux is described by W(T), a function of temperatureobtained by integrating the Planck radiation functionover the wavelength range of 8–14 �m. The collimat-ing lens reflects a fraction r, transmits a fraction � tothe thermopile, and absorbs a fraction 1 � � � r ofincident radiation in this band. In terms of radiatedfluxes, Eq. (1) becomes
where �1 and �2 are geometry factors, having units ofm2 sr, and respectively describing the view of the lensand lens mount from the thermopile. Equation (2) isan expression for radiated power from the sky interms of net power at the sensor unit, and the tem-peratures of the lens, lens mount, and detector, all ofwhich are straightforward to measure. Some im-provements to the instrument, which would simplifythe interpretation of measurements, are suggested byEq. (2): By changing the optics so that the sensor doesnot view the lens mount ��2 � 0�, the term involvingthe lens mount temperature vanishes; by using a lenswith maximal transmittance, � � 1, the term involv-ing the lens temperature becomes negligible. The in-stalled lenses have � near 0.6 according to theirproduct data sheet.
Planck’s radiation law can be inverted numeri-cally to estimate a blackbody temperature from ameasured 8–14 �m radiation flux. Thus, we can cal-culate an effective sky temperature after using Eq.(2) to estimate the 8–14 �m radiation flux from thesky. For 8–14 �m radiation flux in the range of
4.5 � W � 100 W�m2, we approximate the effectivesky temperature (Celsius scale) with a rationalfunction:
T �8.71543 � 10�2W2 � 8.38234W � 139.116
5.93938 � 10�4W2 � 1.28851 � 10�1W � 1.0.
(3)
This range in radiated flux corresponds to a sky tem-perature range of �110 °C to �5 °C. The approxima-tion is accurate to better than 0.1 °C absolute errorover the specified range.
One must be careful about attributing meaning tothe effective sky temperature since it is constructedon an assumption that the sky radiates like a black-body with emissivity 1, which is generally not thecase.7 The effective sky temperature is only a descrip-tive parameter for the sky. It is the temperature of afictitious layer of ideal blackbody, which emits thesame radiation as does the real sky. To obtain a phys-ically meaningful sky temperature, one must observethe infrared spectrum of the sky over a suitably broadrange and apply a more sophisticated analysis,rather than collecting a single number from a narrowspectral window.
Because the desired measurements are only rela-tive, namely, the presence or absence of clouds, anapproximate sky temperature is sufficient for our
purposes. Thus, we have used the information pro-vided in the thermopile data sheets to relate the netradiant power at the sensor to an effective tempera-ture. While not a calibration, this approach providesan approximation to the net power at the sensor.Nevertheless, as a test, we have verified the datasheet values using a prototype instrument. Assumingnominal data sheet values for components, we con-verted observations of a cooling body (80 °C to 0 °C)into radiant flux and found these values to be within10% of the calculated flux based on the the body’stemperature. As shown in Fig. 1, and as can be seenfrom data collected at other times, the nine sensorunits track net energy flux within a �10% range.Thus, this relative radiance uncertainty factor of 1.2propagates to a 10 °C–15 °C error in effective skytemperature. For this reason, no measurements weredeemed necessary for those parameters describingthe optical components, such as lens transparency ordetector sensitivity, nor did we carry out an overallcalibration for the deployed instrument. For the sakeof completeness, we estimate that without a calibra-
W�Tsky� �Pnet � ��1 � r��1 � �2�W�Tdet� � �1 � � � r��1W�Tlens� � �2W�Tmnt�
�1�, (2)
10 April 2007 � Vol. 46, No. 11 � APPLIED OPTICS 2093

tion, the measured absolute sky radiance is uncertainby a factor smaller than 2.
Finally, the operational thermopile temperature ismeasured by means of an on-chip thermistor whosereading is digitized and recorded whenever a netpower measurement is made. Lens and lens mounttemperatures are not measured directly by the in-strument. Instead, we presume these temperaturesto be at the outside air temperature, which is mea-sured by a meteorological station on the observatory’sroof. Thus, the sky temperature is the one unknownwhose value we are attempting to determine in orderto ascertain the presence or absence of clouds.
B. Analysis Procedure
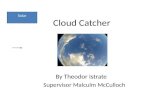
One expects that on a day of solid overcast (or cloud-less skies), the nine sensor units should measure thesame net radiation flux, Pnet. This expectation is ex-amined in Fig. 1, which shows the net 8–14 �m ra-diation on 22 June 2004 averaged over 4 minintervals as measured by each of the nine sensorunits. The numbers near the top of Fig. 1 are thereported cloud cover, in octas, at 6 h intervals. Thesky changes from overcast during the early part ofthe day to clear during the later part, while theground level air temperature remains within therange of 20 °C � 2 °C, as shown in the lower panel.As cloud cover decreases from fully overcast to clear,changes are seen in all sensors due to an increasingnet heat loss �Pnet 0� to the sky. One also sees thatdifferent sensors respond differently to a clear orovercast sky and that sensors reporting a larger netloss to the sky (more negative) do so whether the skyis cloudy or clear. Such variations are of the sizeexpected due to minor differences in components,such as lens condition or thermopile responsivity. Al-ternatively, different detector responses, especiallyfor features seen by some, but not all, sensor units,are likely due to differences in the condensed watercontent (cloud cover) at the various look directions.An absolute calibration of each of the sensor units
would make it possible to better understand the ob-served responses.
Using Eqs. (2) and (3), we have calculated an ef-fective sky temperature for each sample time fromeach sensor unit and then constructed histograms forthe difference between effective sky and air temper-ature at the nearby meteorological station. These areshown in Fig. 2. The bimodal nature of these distri-butions is a striking feature in these plots. We havenot found published distributions of this temperaturedifference and do not know whether the bimodalproperty is unique to the Arrival Heights site, thegeometry of observations, or whether such distribu-tions represent a general property of the atmosphere.However, these bimodal distributions indicate a tech-nique to distinguish between cloudy and clear skies.A small temperature difference, such as for samplesfalling in the right peak, corresponds to a warm skyand indicates the presence of clouds, while a largertemperature difference, such as for samples falling inthe left peak, indicates a clear sky.
To validate our measurements, we have carried outa comparison between the visually observed cloudcover and the data from Arrival Heights for the year2004. Cloud monitor data are available almost con-tinuously at 10 s intervals over the full year. Airtemperature data are required to interpret the cloudinstrument data via the Tlens term, and these temper-atures were available at 1 min intervals for �90%of the year. The visual weather observations report(made by a trained observer) are made four times perday when station access is closed for the austral win-ter (late February through late August) and eighttimes per day at other times. As mentioned earlier inSection 1, the visual reports are given in fractions ofthe sky containing clouds. These fractions are ineighths of the sky, or octas. The intersection of 1377octa measurements and the air temperature mea-surements contained 1188 sample intervals. Of thesetimes, 12 were discarded due to cloud monitor down-time. Raw cloud monitor measurements were aver-aged over a 4 min window centered on the time stamp
Fig. 1. Top panel shows net 8–14 �m radiation, as measured bynine sensor units (separate traces), while sky changes from cloudyto clear. Visual octa values at top indicate cloud cover (0—clear,8—overcast). Lower panel is air temperature on observatory roof.
Fig. 2. Distributions of the difference between the effective skytemperature and the local air temperature (°C) over the year 2004for all nine sensor units.
2094 APPLIED OPTICS � Vol. 46, No. 11 � 10 April 2007

of each visual octa reading and then processed intosky radiation using Eq. (2). The 4 min averages weremade in order to have a comparison whose time spanis comparable to the time it takes to make the visualmeasurements.
Even though our cloud monitor identifies cloudpresence at only nine small fixed regions in the sky,a comparison, or validation, with the visual cloudcover was deemed worth performing. This has re-quired our devising several algorithms for which theresultant output from the cloud monitor is expressedas an integer from 0 to 8, and where a low tempera-ture difference, as in the right peaks of Fig. 2, indi-cates clouds and a high temperature differenceindicates clear sky. Each algorithm should generate acloud cover number that is comparable directly withthe visual meteorological observations. These algo-rithms have been tested empirically to examine theirstrengths and weaknesses.
The bimodal distributions in Fig. 2 suggest thatusing a single threshold in the temperature dif-ference between sky and surface air �T � Tsky� Tlens� ought to be sufficient to distinguish cloudyfrom clear skies. For this first method, we have arbi-trarily omitted the zenith-viewing unit and chose athreshold for the remaining eight units at their valleyminima. The single threshold method assigns aweight of 1 (obscured) to a sensor viewing a warmsky, T � �20, and a weight of 0 (clear) to a sensor
viewing a cold sky, T �20. Then the number ofsensor units whose temperature difference is belowthreshold generates an octa index n with 0 � n � 8.As seen in Fig. 3, this method has the disadvantage ofpoor sensitivity to intermediate cloud cover.
To better capture intermediate cloud cover and toinclude data from the zenith-viewing unit, we deviseda second method for data reduction, which distin-guishes four, rather than two, categories of cloudcover, again based on the size of the Fig. 2 tem-perature differences. This entailed setting two moretemperature thresholds to supplement the singlethreshold choice. These were arbitrarily chosen tocorrespond with 75% of the peak values and to liewithin the Fig. 2 valley. Table 1 summarizes thecutoff T values for the nine sensor units. With fourT categories, there is a corresponding need for atotal of four weights to code for the cloudiness asso-ciated with each category. Imposing a requirementthat the selected weights be the same for all ninesensor units simplifies the optimization by limitingthe number of weights to four. As with the singlethreshold example, we chose weights of 0 and 1 (ob-scured and clear) to correspond to the minimum andmaximum T categories, respectively. Following thischoice, two more weights, each between 0 and 1, areneeded. To further simplify the search for twoweights, we considered weights that are integer mul-tiples of 1�100. That is, we search a two-dimensional
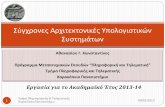
Fig. 3. Distribution of cloud-cover measurements from Arrival Heights Observatory during 2004 is shown in the left panel. Measurementswere obtained from visual observations (dark gray central bar) and from the cloud monitor using two algorithms: a single-threshold method(black left bar) and a three-threshold method (light gray right bar). Vertical lines at the histogram peaks represent one standard deviationbased on counting statistics. Right panel compares observer-determined cloud cover with that derived from the three-threshold algorithm.Note that most of the distribution is close to the diagonal where instrument and observer octas match.
Table 1. �T Threshold Values
ID No. 1 No. 2 No. 3 ID No. 1 No. 2 No. 3 ID No. 1 No. 2 No. 3
N �33 �20 �10 NW �33 �20 �8 W �30 �21 �8SW �35 �23 �14 S �29 �16 �7 SE �35 �19 �9E �33 �16 �9 NE �38 �22 �9 Z �38 �25 �19
10 April 2007 � Vol. 46, No. 11 � APPLIED OPTICS 2095

array of possible weights (x, y) with x y andx, y � �1�100, 2�100, . . . , 99�100. The optimizationcriterion was to minimize the sum over the set of ob-servations of the squares of the differences betweenthe visual and calculated octas (least-squares crite-rion). The resulting set of four weights is �0.0, 0.57,0.77, 1.0 � 8.499�9.000. The scaling factor, 8.499�9,addresses the technicality of adjusting the sum ofnine sensor weights to be less than 8.5, so that round-ing will produce an integer value in the range�0, 1, . . . , 8. Briefly, the three-threshold method forconstructing an octa index is to calculate a tempera-ture difference for each sensor unit, use the Table 1thresholds to select which of four weights correspondto each temperature difference, add the weights of thenine sensor units, and then round to an integer.
C. Results
For completeness in the comparison, or validation, wedivided the year 2004 samples (1176) for which ex-isted cloud cover for the comparison, into daytime(Sun up with 808 samples) and nighttime (furtherdivided into Sun down and moonlit, with 156 sam-ples, and Sun down and moonless, with 201 samples)and then compared the visual observed cloud coverwith a cloud-cover measure from the single- andthree-threshold algorithms applied to the cloud mon-itor data. It was necessary to discard 11 ambiguousinstances of Sun down and a risen, nearly new, Moon.Sun up means daylight through civil twilight, withother times being Sun down. Moonlit is when theMoon’s disk is at or above the horizon, and it is atleast 3.5 days away from the new Moon. For moonlessnights, the Moon is below the horizon without regardto lunar phase. Figure 3 shows this comparison inwhich visual observer data are coded as darker graybars, while the single- and three-threshold algo-rithms for the cloud monitor are coded as black andlight gray bars. With the small number of nighttimesamples, significant differences between Moon beingup or down are difficult to identify. Examining dayand night differences in the figure, six features areapparent:
(1) An observer sees clear skies (0 octas) fourtimes more frequently during nighttime than duringdaylight.
(2) An observer sees nearly clear (1 octa) skies halfas frequently during nighttime as during daylight.
(3) An observer sees nearly overcast skies (7 oc-tas) one-fourth as frequently during nighttime asduring daylight.
(4) An observer sees completely overcast skies(8 octas) twice as frequently during nighttime as dur-ing daylight.
(5) There is no significant day and night differencein cloud cover as determined by the single-thresholdalgorithm.
(6) The three-threshold algorithm identifies clearskies (0 octas) twice as often during nighttime asduring daylight.
Under conditions of low illumination, observers atthe South Pole fail to observe a fraction of cloud cov-er.4 This results in an underestimate of cloud coverduring the polar night and is a possible explanationfor our finding of higher clear sky frequency reportedduring sun down times at McMurdo. However, forovercast conditions (8 octas), this cannot explain ourfindings of difference between weather observer andcloud monitor reports under dark and light con-ditions, nor those differences at 1 or 7 octas. Wespeculate the daytime enhancement of 1 or 7 octameasurements arises from a peculiarity in the wayvisual octas are reported. According to accepted re-porting practice,3 any detectable amount of cloud isassigned at least 1 octa, while any size break in cloudcover is coded as at most 7, rather than 8 octas. Thisprocedure enlarges the range of cloud cover assignedto 1 or 7 octas at the expense of that represented by0 or 8 octas as long as the observer can identify smallclouds or breaks. Localized breaks in cloud cover orsmall clouds might be more difficult to observe atnight than during daylight, accounting for those re-ported differences in day and night cloud cover. Ourcloud monitor is not sensitive to ambient lighting biasas a human observer is, and so one expects that light-ing conditions would not affect the histograms for thederived octas. Figure 3 shows that this is mostly thecase. We do not understand why the three-thresholdalgorithm gives more clear skies (0 octas) undermoonlit conditions. However, the frequency of nearlyclear (0 or 1 observer octas) is also about twice as highduring night (winter), suggesting that the sky is, infact, clearer during the polar night. This is likelycaused by the smaller atmospheric moisture burdenduring the cold antarctic winters.
As shown in Fig. 3, the one-threshold octa measuresare a poor match to the visual octas in that there aretoo few intermediate levels of cloud cover and too manyextreme levels (0 or 8 octas cloud cover). The one-threshold algorithm considers the sky at 20° above thehorizon only, ignoring the zenith. This emphasis onlow elevations may be oversensitive to ground fog,blowing snow, etc., so that the single-threshold algo-rithm misconstrues above-normal column-integratedwater content as cloud cover.
For the combined data set, the three-threshold oc-tas correlate well with visual octas as shown in theright panel of Fig. 3. Most of the observations are onor close to the diagonal of this correlation graph.While the observed and three-threshold cloud moni-tor octa values matched only 33% of the time, the twomeasures were within one octa 65% of the time andwithin 2 octas 82% of the time. Statistically, one couldsay that this finding gives one octa as one standarddeviation of fit. This finding is not surprising in viewof the arbitrariness in both the integer definition ofthe octa measure and the need to state our results inthe same integer units. Also the presence of, say, acouple of small clouds outside the field of view of ournine sensors (which altogether cover �1% of the sky)will give rise to a higher visual octa value than wouldbe reported by our cloud monitor.
2096 APPLIED OPTICS � Vol. 46, No. 11 � 10 April 2007

Cloud cover is dynamic, so that some of the dis-crepancy between observer and cloud monitor mea-surements could arise from time differences betweensynoptic observations and those made by the cloudmonitor. Temporal differences arise from severalsources: drifts in hardware clocks; incomplete recordsof when clocks are changed between various timeconventions, such as standard, daylight, or universaltime; and visual synoptic observations being mademore than a few minutes from the nominal 6 h ob-servation time.
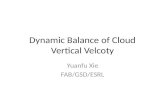
The small fields of view of the cloud monitor sen-sors are likely to render the derived octa index verysensitive to changing cloud cover. The motion of asmall cloud across the field of view of one sensor canchange the output octa index by a unit in a matter ofminutes. During such times, however, the infrequentsynoptic measurements also give an incomplete viewof what is happening. Such changes are apparent inFig. 4, which shows observer octas at 6 h samplingand cloud monitor octa estimates with an hourly sam-pling rate. Note that the lower time resolution syn-optic cloud cover measurements can miss a dynamicsky, for instance, as on 6 May 2004 or 20 May 2004.
4. Discussion
The cloud monitor instrument, deployed now for 4years at Arrival Heights, Antarctica, has shown thata remote measurement of the sky’s effective temper-ature is a reliable means of determining cloud coverat selected small portions in the sky. This ruggedinstrument has operated outdoors in the hostile en-vironment of coastal Antarctica for over 4 years withnegligible downtime.
In the process of validation of our measurements,with an array of nine sensor units looking at only 1%of the sky, we have been able to construct a cloudcover measure in the usual meteorological units ofoctas, which we have compared for 1 year of ourobservations with the standard synoptic all-sky cloudcover made by a trained observer, in the same units.This validation shows a rather good agreement,where the measures matched 33% of the time and
within 2 octas 82% of the time. Our cloud cover mon-itor system measurements were shown to have threedistinct advantages over those measurements madeby a human observer:
(1) The measurements can be defined and madeobjectively using uniform instrumentation.
(2) Ambient light levels do not influence the qual-ity of the measurements.
(3) The cadence of measurements can be in-creased by several orders of magnitude from approx-imately 4�day to 5�min, without incurring extra cost.
These reasons suggest that expanded use of cloudmonitors, such as the one described here, offers thepossibility of increasing the quantity of cloud covermeasurements as well as objectively equalizing themeaning of these measurements. The absence of mov-ing mechanisms and inherent component ruggednessare factors that suggest that a similar instrumentcould retrieve in situ cloud cover measurements fromisolated unmanned sites, including the surface ofother solid bodies in the solar system.
It is remarkable that the present cloud monitor canyield a meteorologically useful cloud-cover index fromviewing �1% of the sky. To approach a full-sky cloud-cover measurement, a goal not considered during thedesign of the prototype instrument, requires a simplechange of the cloud monitor’s field of view to include aslarge a fraction of the sky as desired. Also, as we havesuggested in comments following Eq. (2), making smallchanges to some of the optical components and cali-brating the individual sensor units would both sim-plify data analysis and improve the quality of themeasurements.
In conclusion, the successful deployment of a small,rugged, and low-power cloud monitor in the hostileantarctic environment has shown not only that thedesired measurements were attainable but also hasshown clearly the possibilities that such a device hasfor providing cloud-cover measurement more reliablythan those made by a human observer, since thelatter are affected by ambient illumination, and on areal-time basis. In addition, these devices can be de-ployed in isolated and�or unmanned locations, whereno meteorological observations are presently made.
This work was supported by the National ScienceFoundation Office of Polar Programs through grantsOPP-0085099 and OPP-0229251. We thank MatthewLazzara at the University of Wisconsin’s AntarcticMeteorological Research Center for meteorologicaldata and his help in interpreting it; Laura Tudor, theoverwintering technician responsible for maintainingthe meteorological station and cloud monitor at Ar-rival Heights; Bryan Venema for electronics advice;and the Physics Instrument Shop for instrumentfabrication.
References1. G. Hernandez, R. W. Smith, and J. Conner, “Neutral wind and
temperature in the upper mesosphere above South Pole, Ant-arctica,” Geophys. Res. Lett. 19, 53–56 (1992).
Fig. 4. Comparison of observed (every 6 h) and calculated (everyhour) octas for 30 days in 2004.
10 April 2007 � Vol. 46, No. 11 � APPLIED OPTICS 2097

2. G. Hernandez, “Winter mesospheric temperatures aboveSouth Pole (90° S) and their relationship to the springtimeozone hole size,” Geophys. Res. Lett. 31, L071109 (2004).
3. National Oceanic and Atmospheric Administration, FederalMeteorological Handbook Number 2 (FMH-2), Surface Synop-tic Codes (NOAA, 1988).
4. G. Schneider, P. Paluzzi, and J. P. Oliver, “Systematic error inthe synoptic sky cover record of the South Pole,” J. Clim. 2,295–302 (1989).
5. M. S. Town, V. P. Walden, and S. G. Warren, “Cloud coverclimatology for the South Pole from surface-based infraredradiation measurements,” presented at the 8th Conference onPolar Meteorology and Oceanography, 2005, American Mete-orological Society, paper P1.26.
6. C. J. Hahn, S. G. Warren, and J. London, “The effect of moon-light on observation of cloud cover at night, and application tocloud climatology,” J. Clim. 8, 1429–1446 (1995).
7. R. Sloan, J. H. Shaw, and D. Williams, “Infrared emissionspectrum of the atmosphere,” J. Opt. Soc. Am. 45, 455–460(1955).
8. R. W. Clay, N. R. Wild, D. J. Bird, B. R. Dawson, M. Johnston,
R. Patrick, and A. Sewell, “A cloud monitoring system forremote sites,” Publ.-Astron. Soc. Aust. 15, 332–335 (1998).
9. T. P. Ackerman and G. M. Stokes, “The atmospheric radiationmeasurement program,” Phys. Today 56(1), 38–44 (2003).
10. R. O. Knuteson, H. E. Revercomb, F. A. Best, N. C. Ciganovich,R. G. Dedecker, T. P. Dirkx, S. C. Ellington, W. F. Feltz, R. K.Garcia, H. B. Howell, W. L. Smith, J. F. Short, and D. C. Tobin,“Atmospheric emitted radiance interferometer. Part I: Instru-ment design,” J. Atmos. Ocean. Technol. 21, 1763–1776 (2004).
11. R. O. Knuteson, H. E. Revercomb, F. A. Best, N. C. Ciganovich,R. G. Dedecker, T. P. Dirkx, S. C. Ellington, W. F. Feltz, R. K.Garcia, H. B. Howell, W. L. Smith, J. F. Short, and D. C. Tobin,“Atmospheric emitted radiance interferometer. Part II: Instru-ment performance,” J. Atmos. Ocean. Technol. 21, 1777–1789(2004).
12. V. R. Morris, C. N. Lang, and D. Nelson, “Deployment of aninfrared thermometer network at the atmospheric radiationmeasurement program southern Great Plains climate facility,”in Sixteenth ARM Science Team Meeting Proceedings, Albu-querque, N. Mex., March 27–31, 2006 (2006).
2098 APPLIED OPTICS � Vol. 46, No. 11 � 10 April 2007