Unmesh Kurup, Christian Lebiere, Anthony Stentz, Martial Hebert
13
Proceedings of the Twenty-Sixth AAAI Conference on Artificial Intelligence Proceedings of the Twenty-Sixth AAAI Conference on Artificial Intelligence Using Expectations to Drive Using Expectations to Drive Cognitive Behavior Cognitive Behavior Unmesh Kurup, Christian Lebiere, Anthony Stentz, Unmesh Kurup, Christian Lebiere, Anthony Stentz, Martial Hebert Martial Hebert Επισκόπηση δημοσίευσης Επισκόπηση δημοσίευσης Προηγμένη Τεχνητή Νοημοσύνη Προηγμένη Τεχνητή Νοημοσύνη 2012-201 2012-2013 Πάνος Κούκιος Πάνος Κούκιος
description
Proceedings of the Twenty-Sixth AAAI Conference on Artificial Intelligence Using Expectations to Drive Cognitive Behavior. Unmesh Kurup, Christian Lebiere, Anthony Stentz, Martial Hebert. Επισκόπηση δημοσίευσης Προηγμένη Τεχνητή Νοημοσύνη 2012-201 3 Πάνος Κούκιος. Expectations and cognition. - PowerPoint PPT Presentation
Transcript of Unmesh Kurup, Christian Lebiere, Anthony Stentz, Martial Hebert

Proceedings of the Twenty-Sixth AAAI Conference on Artificial IntelligenceProceedings of the Twenty-Sixth AAAI Conference on Artificial Intelligence
Using Expectations to Drive Using Expectations to Drive Cognitive BehaviorCognitive Behavior
Unmesh Kurup, Christian Lebiere, Anthony Stentz, Martial Unmesh Kurup, Christian Lebiere, Anthony Stentz, Martial HebertHebert
Επισκόπηση δημοσίευσηςΕπισκόπηση δημοσίευσης
Προηγμένη Τεχνητή Νοημοσύνη 2012-Προηγμένη Τεχνητή Νοημοσύνη 2012-20120133
Πάνος ΚούκιοςΠάνος Κούκιος

Expectations and Expectations and cognitioncognition in addition to simply comparing current and in addition to simply comparing current and
desired states, we can drive cognition by desired states, we can drive cognition by generating a future state, called an expectation, generating a future state, called an expectation, at each step and comparing that generated at each step and comparing that generated state to the state of the world at the next step. state to the state of the world at the next step.
When expectation and perception match, the When expectation and perception match, the expected next step is taken and the process is expected next step is taken and the process is repeated. repeated.
However, when there is a mismatch, attention is However, when there is a mismatch, attention is focused on the mismatch to resolve the focused on the mismatch to resolve the problem. problem.

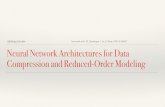
ACT-R (symbolic layer)ACT-R (symbolic layer)
Declarative
Goal
Imaginal
Perceptual(Visual and Aural)
Motor(Manual and Speech)
buffer
buffer
buffer
buffer
buffer
Procedural

ACT-R (symbolic layer)ACT-R (symbolic layer)
ChunksChunks are typed units similar to schemas are typed units similar to schemas or frames that include named slots (slot-or frames that include named slots (slot-value pairs). value pairs).
ProductionsProductions are condition-action rules, are condition-action rules, – the conditions check for the existence of certain the conditions check for the existence of certain
chunks in one or more buffers. If true, then chunks in one or more buffers. If true, then executed. Only one production can fire at a executed. Only one production can fire at a time. time.
– In its action part, a production can make In its action part, a production can make changes to existing chunks in buffers or make changes to existing chunks in buffers or make requests for new chunks.requests for new chunks.

ACT-R (sub-symbolic ACT-R (sub-symbolic layer)layer) Associates values (similar to neural Associates values (similar to neural
activations) to chunks and activations) to chunks and productions. productions.
Only those chunks that have an Only those chunks that have an activation value greater than a activation value greater than a threshold (called the retrieval threshold (called the retrieval threshold) are retrieved. threshold) are retrieved.

Partial MatchingPartial Matching
In ACT-R, productions make requests for chunks In ACT-R, productions make requests for chunks in declarative memory by specifying certain in declarative memory by specifying certain constraints on the slot values of chunks. If constraints on the slot values of chunks. If multiple chunks return, the chunk with the multiple chunks return, the chunk with the highest activation value is retrieved. The highest activation value is retrieved. The activation value of a chunk is the sum of its base-activation value of a chunk is the sum of its base-level activation and its contextual activation.level activation and its contextual activation.
The base-level activation of a chunk is a measure The base-level activation of a chunk is a measure of its frequency and recency of access.of its frequency and recency of access.
When partial matching is enabled, the retrieval When partial matching is enabled, the retrieval mechanism can select the chunk that matches mechanism can select the chunk that matches the retrieval constraints to the greatest degree.the retrieval constraints to the greatest degree.

BlendingBlending
combining the relevant chunks. combining the relevant chunks.
The values of the slots of this The values of the slots of this blended chunk are the average blended chunk are the average values for the slots of the values for the slots of the relevant chunks weighted by their relevant chunks weighted by their respective activations, where the respective activations, where the average is defined in terms of the average is defined in terms of the similarities between values. similarities between values.

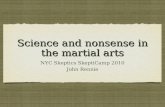
Classifying Pedestrian Classifying Pedestrian BehaviorBehavior

Tracking PedestriansTracking Pedestrians
object detection algorithmobject detection algorithm
bounding boxes for each person in the bounding boxes for each person in the image, together with a confidence value. The image, together with a confidence value. The ACT-R model converts this bounding box into ACT-R model converts this bounding box into a single x,y coordinate that is the mid-point a single x,y coordinate that is the mid-point along the base of the bounding box. along the base of the bounding box.
The model represents this information The model represents this information together with the rate of change (delta) in a together with the rate of change (delta) in a chunk in declarative memory.chunk in declarative memory.

FeaturesFeatures and and Classifying BehaviorsClassifying Behaviors The model classifies pedestrian behaviors by The model classifies pedestrian behaviors by
abstracting their tracks into a set of features abstracting their tracks into a set of features where a feature is simply a rectangular where a feature is simply a rectangular region in the scene. If a pedestrian’s track region in the scene. If a pedestrian’s track intersects that region, then that track is said intersects that region, then that track is said to have that particular feature. The to have that particular feature. The directionality of the track is captured by the directionality of the track is captured by the sequence of features that the model builds sequence of features that the model builds for each track. for each track.
for each track the model learns a chunk that for each track the model learns a chunk that captures the association between the captures the association between the features and the pedestrian’s behavior. features and the pedestrian’s behavior.

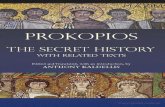
ResultsResults
Learning Model(Single Behavior
Set)
Learning Model(Multiple Behavior
Set)
Made 86.1% Made 82.4%
Correct 68% Correct 43.8%
Incorrect 18.1% Incorrect 38.6%
K-NN Model(Single Behavior
Set)
K-NN Model(Multiple Behavior
Set)
Made 86.1% Made 82.4%
Correct 68% Correct 43.8%
Incorrect 18.1% Incorrect 38.6%

Future workFuture work
understanding how expectations can be used to understanding how expectations can be used to make perception better by providing context make perception better by providing context and directing attention.and directing attention.
understanding how expectation-drivencognition understanding how expectation-drivencognition can work with deliberative approaches such as can work with deliberative approaches such as Learning Goal Driven AutonomyLearning Goal Driven Autonomy
the theory of expectation-driven cognition, the theory of expectation-driven cognition, given the rapidity of the generation and given the rapidity of the generation and matching processes, calls for an architectural matching processes, calls for an architectural solution.solution.

Thank YouThank You