Two-Axis MEMS Lens Alignment System for Free-Space …
16
IEEE Proof IEEE JOURNAL OF SELECTED TOPICS IN QUANTUM ELECTRONICS 1 Two-Axis MEMS Lens Alignment System for Free-Space Optical Interconnect 1 2 Brian E. Yoxall, Member, IEEE, Robert Walmsley, Huei-Pei Kuo, Shih-Yuan Wang, Fellow, IEEE, Mike Tan, and David A. Horsley, Member, IEEE 3 4 Abstract—We present a two-axis microelectromechanical sys- 5 tems (MEMS) lens aligner with a 260 μm × 220 μm transla- 6 tion range that positions a 6.35 mm lens with focal length f = 7 12.1 mm for alignment compensation of free-space optical inter- 8 connects (FSOIs) between computer servers separated by 50 mm 9 spacing. Efficient ultrasonic linear piezoelectric motors (PMs) pro- 10 vide actuation with zero power required to hold the lens alignment. 11 A four-channel FSOI is demonstrated with 1 × 4 vertical cavity 12 surface-emitting laser (VCSEL) and photodiode (PD) arrays capa- 13 ble of 10 Gb/s transmission bandwidth. Demonstrated minimum 14 step size of 1.68 μm is sufficient for aligning the 20 μm VCSEL 15 spots onto the 40 μm PD receivers. Force transmission between 16 PMs and a silicon MEMS flexure stage is accomplished using a 17 1-mm steel ball bearing in a magnetic groove, providing compli- 18 ance in the nondriven axis. The ball-coupling design has 15 μm 19 backlash and induces a maximum of 8 μm of cross-axis motion. 20 Index Terms—Alignment stage, microelectromechanical systems 21 (MEMS), optical interconnect, piezoelectric ultrasonic stepper mo- 22 tor, two-axis actuator. 23 I. INTRODUCTION 24 B ANDWIDTH capacity and high power consumption are 25 fundamental limitations of the traditional copper-wire- 26 based communication in computer servers. At very high band- 27 widths, optical interconnects will require less power to operate 28 than copper data paths [1]. Optical interconnects are already 29 widely used at the cabinet level in data centers and are promis- 30 ing candidates for on-chip interconnects in future microproces- 31 sors [2]. Here, we consider the problem of creating free-space 32 optical interconnect (FSOI) at the board-to-board level. In com- 33 parison to interconnects using on-board waveguides routed to 34 an optical backplane, FSOI offers the advantages of high den- 35 sity [3] and lower board and backplane cost, but requires active 36 multiaxis alignment to achieve efficient optical coupling from 37 source to receiver [4]. The causes of source–receiver misalign- 38 ment include vibration, thermal shifts, and static misalignment 39 between the two server boards. Experimental measurements of 40 Manuscript received June 26, 2010; revised September 18, 2010; accepted September 13, 2010. This work was supported by Hewlett-Packard. Q1 B. E. Yoxall and D. A. Horsley are with the Department of Mechanical and Aerospace Engineering, University of California, Davis, CA 95616 USA (e-mail: [email protected]; [email protected]). R. Walmsley, H. Kuo, S. Y. Wang, and M. Tan are with Hewlett-Packard Laboratory, Palo Alto, CA 94304 USA (e-mail: [email protected]; [email protected]; [email protected]; [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/JSTQE.2010.2089043 a typical server chassis [5] show static misalignment (∼250 μm) 41 is considerably greater than thermal shift (∼20 μm upon pow- 42 ering on the server) or mechanical vibration (<1 μm). As a 43 result, continuous dynamic correction is not required; instead, 44 the ideal alignment system would correct the alignment once 45 (upon installation or replacement of the server), after which the 46 alignment would be retained with zero power consumption. 47 Earlier approaches to alignment systems for board-to-board 48 FSOI have included bulk prisms [6], beam splitters [7], mechan- 49 ical translation stages [8], liquid crystal beam steering [9], and 50 optical microelectromechanical systems (MEMS) devices [10]. 51 Among these, optical MEMS technology is attractive because it 52 allows wafer-scale batch fabrication of low-cost devices. Many 53 existing two-axis MEMS lens scanner designs require constant 54 power to maintain lens position [11], have a limited correction 55 range [12], or have a relatively small lens diameter [13], making 56 them incapable of aligning an array of lasers over the 50-mm 57 distance separating two boards in a modern server chassis. 58 Here, we describe a MEMS-based low-power active align- 59 ment system for FSOI using a piezoelectrically actuated lens 60 to align vertical cavity surface-emitting laser (VCSEL) arrays 61 to receiver photodiodes (PDs). The piezoelectric stepper motor 62 technology used here consumes less than 250 mW in full-power 63 operation and requires zero power to maintain static alignment, 64 similar to recent MEMS stepper motor designs [14], [15]. Unlike 65 many earlier MEMS lens alignment systems, the bulk microma- 66 chined stage described here is suitable for positioning a large 67 6.35-mm diameter lens, allowing the alignment of 1 × 4 VCSEL 68 arrays over a 50-mm link distance. 69 II. DESIGN 70 A. Device and Test Setup 71 The lens aligner is a 1.3 cm × 3.3 cm × 3.3 cm assembly of 72 a silicon MEMS flexure stage, a plastic aspheric lens, and two 73 piezoelectric motors (PMs), as shown in Fig. 1. The spacing 74 and alignment of the flexure stage and PMs is provided by 75 an aluminum mounting block. Force is transmitted between 76 the MEMS flexure and PMs by a ball/groove device, which 77 decouples the two translation axes, as described in Section II-D. 78 The board-to-board schematic is shown in Fig. 2. The MEMS 79 aligner translates the first lens of a telecentric lens pair to posi- 80 tion VCSEL beams to the PD array. The position information 81 from the PD array is used for feedback control. The telecen- 82 tric lens configuration reduces distortion and sensitivity to axial 83 misalignment and board-to-board spacing variation [16]–[18]. 84 1077-260X/$26.00 © 2010 IEEE
Transcript of Two-Axis MEMS Lens Alignment System for Free-Space …

IEEE
Proo
f
IEEE JOURNAL OF SELECTED TOPICS IN QUANTUM ELECTRONICS 1
Two-Axis MEMS Lens Alignment System forFree-Space Optical Interconnect
1
2
Brian E. Yoxall, Member, IEEE, Robert Walmsley, Huei-Pei Kuo, Shih-Yuan Wang, Fellow, IEEE, Mike Tan,and David A. Horsley, Member, IEEE
3
4
Abstract—We present a two-axis microelectromechanical sys-5tems (MEMS) lens aligner with a 260 μm × 220 μm transla-6tion range that positions a 6.35 mm lens with focal length f =712.1 mm for alignment compensation of free-space optical inter-8connects (FSOIs) between computer servers separated by 50 mm9spacing. Efficient ultrasonic linear piezoelectric motors (PMs) pro-10vide actuation with zero power required to hold the lens alignment.11A four-channel FSOI is demonstrated with 1 × 4 vertical cavity12surface-emitting laser (VCSEL) and photodiode (PD) arrays capa-13ble of 10 Gb/s transmission bandwidth. Demonstrated minimum14step size of 1.68 μm is sufficient for aligning the 20 μm VCSEL15spots onto the 40 μm PD receivers. Force transmission between16PMs and a silicon MEMS flexure stage is accomplished using a171-mm steel ball bearing in a magnetic groove, providing compli-18ance in the nondriven axis. The ball-coupling design has 15 μm19backlash and induces a maximum of 8 μm of cross-axis motion.20
Index Terms—Alignment stage, microelectromechanical systems21(MEMS), optical interconnect, piezoelectric ultrasonic stepper mo-22tor, two-axis actuator.23
I. INTRODUCTION24
BANDWIDTH capacity and high power consumption are25
fundamental limitations of the traditional copper-wire-26
based communication in computer servers. At very high band-27
widths, optical interconnects will require less power to operate28
than copper data paths [1]. Optical interconnects are already29
widely used at the cabinet level in data centers and are promis-30
ing candidates for on-chip interconnects in future microproces-31
sors [2]. Here, we consider the problem of creating free-space32
optical interconnect (FSOI) at the board-to-board level. In com-33
parison to interconnects using on-board waveguides routed to34
an optical backplane, FSOI offers the advantages of high den-35
sity [3] and lower board and backplane cost, but requires active36
multiaxis alignment to achieve efficient optical coupling from37
source to receiver [4]. The causes of source–receiver misalign-38
ment include vibration, thermal shifts, and static misalignment39
between the two server boards. Experimental measurements of40
Manuscript received June 26, 2010; revised September 18, 2010; acceptedSeptember 13, 2010. This work was supported by Hewlett-Packard.
Q1 B. E. Yoxall and D. A. Horsley are with the Department of Mechanicaland Aerospace Engineering, University of California, Davis, CA 95616 USA(e-mail: [email protected]; [email protected]).
R. Walmsley, H. Kuo, S. Y. Wang, and M. Tan are with Hewlett-PackardLaboratory, Palo Alto, CA 94304 USA (e-mail: [email protected];[email protected]; [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/JSTQE.2010.2089043
a typical server chassis [5] show static misalignment (∼250 μm) 41
is considerably greater than thermal shift (∼20 μm upon pow- 42
ering on the server) or mechanical vibration (<1 μm). As a 43
result, continuous dynamic correction is not required; instead, 44
the ideal alignment system would correct the alignment once 45
(upon installation or replacement of the server), after which the 46
alignment would be retained with zero power consumption. 47
Earlier approaches to alignment systems for board-to-board 48
FSOI have included bulk prisms [6], beam splitters [7], mechan- 49
ical translation stages [8], liquid crystal beam steering [9], and 50
optical microelectromechanical systems (MEMS) devices [10]. 51
Among these, optical MEMS technology is attractive because it 52
allows wafer-scale batch fabrication of low-cost devices. Many 53
existing two-axis MEMS lens scanner designs require constant 54
power to maintain lens position [11], have a limited correction 55
range [12], or have a relatively small lens diameter [13], making 56
them incapable of aligning an array of lasers over the 50-mm 57
distance separating two boards in a modern server chassis. 58
Here, we describe a MEMS-based low-power active align- 59
ment system for FSOI using a piezoelectrically actuated lens 60
to align vertical cavity surface-emitting laser (VCSEL) arrays 61
to receiver photodiodes (PDs). The piezoelectric stepper motor 62
technology used here consumes less than 250 mW in full-power 63
operation and requires zero power to maintain static alignment, 64
similar to recent MEMS stepper motor designs [14], [15]. Unlike 65
many earlier MEMS lens alignment systems, the bulk microma- 66
chined stage described here is suitable for positioning a large 67
6.35-mm diameter lens, allowing the alignment of 1× 4 VCSEL 68
arrays over a 50-mm link distance. 69
II. DESIGN 70
A. Device and Test Setup 71
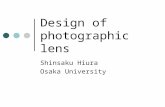
The lens aligner is a 1.3 cm × 3.3 cm × 3.3 cm assembly of 72
a silicon MEMS flexure stage, a plastic aspheric lens, and two 73
piezoelectric motors (PMs), as shown in Fig. 1. The spacing 74
and alignment of the flexure stage and PMs is provided by 75
an aluminum mounting block. Force is transmitted between 76
the MEMS flexure and PMs by a ball/groove device, which 77
decouples the two translation axes, as described in Section II-D. 78
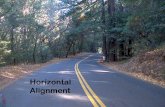
The board-to-board schematic is shown in Fig. 2. The MEMS 79
aligner translates the first lens of a telecentric lens pair to posi- 80
tion VCSEL beams to the PD array. The position information 81
from the PD array is used for feedback control. The telecen- 82
tric lens configuration reduces distortion and sensitivity to axial 83
misalignment and board-to-board spacing variation [16]–[18]. 84
1077-260X/$26.00 © 2010 IEEE

IEEE
Proo
f
2 IEEE JOURNAL OF SELECTED TOPICS IN QUANTUM ELECTRONICS
Fig. 1. Assembly schematic for complete two-axis lens aligner includingmonolithic mount, PMs and ball/groove couplers, MEMS flexure stage, as-pheric lens, and PC Board.
Fig. 2. Test setup to demonstrate feedback control of the MEMS/FSOI align-ment correction device. The primary components are VCSEL source, MEMSlens aligner, receiver lens, and PD array.
B. Piezoelectric Stepper Motor Characterization85
Ultrasonic PMs are ideal for MEMS actuation due to their86
high driving force, large stroke, small incremental motion, and87
low power requirements [19]. The PMs used here (PI-652,88
Physik Instrumente) are 9 mm × 5.4 mm linear motors with89
3-mm actuation range and minimum step size less than 1 mm.90
The PM has a maximum actuating force of 0.1 N and a frictional91
hold force of 0.2 N when not driven. The PM consists of a mov-92
ing carriage/slider mounted on a resonating piezoelectric stator,93
as shown in Fig. 3. Electrodes on the two halves of the stator94
allow excitation at its resonant frequency (450 kHz), causing the95
carriage to travel toward the right or left, depending on which96
Fig. 3. PM image showing the piezoelectric stator and steel carriage/slider.The stator operates in a resonant mode that incrementally moves the slider aslittle as ∼1 μm.
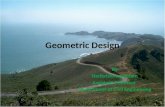
Fig. 4. (a) Step size as a function of drive pulse duration. (b) LDV measure-ment on oscilloscope of PM vibration during a drive cycle, showing ring uptime ∼0.15 ms. The minimum drive pulse is 0.1 ms, during which time, the PMvibration never reaches full amplitude, but it is sufficient to cause slider motion.
electrode is driven. The duration of the sinusoidal excitation sig- 97
nal is gated using a TTL input pulse signal. As described later, 98
the carriage actuation distance is a function of the duration and 99
amplitude of excitation as well as the load and position on the 100
stator. 101
To characterize the mechanical behavior of the PM, a laser 102
Doppler vibrometer (LDV) was used to measure the time- 103
dependent displacement of the stator edge in response to a 104
0.5-ms pulse input. As shown in Fig. 4(b), the steady-state vi- 105
bration amplitude is reached 150 μs after the start of excitation, 106
corresponding to a mechanical quality factor Q ∼ 100. LDV 107
measurements collected at varying supply voltages showed that 108
the vibration amplitude scaled in proportion to the supply volt- 109
age. Carriage motion is small until the vibration is near the 110
steady-state amplitude, thus the minimum excitation pulse is 111
0.1 ms. Measurements collected at a supply voltage of 3.4 V for 112
0.1, 0.2, and 0.3 ms excitation pulses showed a nearly linear de- 113
pendence of the motion on the pulse duration, with a minimum 114
step size of 1.68 μm, as shown in Fig. 4(a). Similarly, varying 115
the supply voltage from 3.4 to 5 V for a constant 0.1 ms pulse 116
duration resulted in a nearly linearly increase in the minimum 117
step size from 1.68 to 11 μm. 118
As a measure of the repeatability of positioning, Fig. 5 shows 119
a return-to-home (RTH) test in which the PM was driven at 120
the minimum step size for ten steps in each direction. Over 121

IEEE
Proo
f
YOXALL et al.: TWO-AXIS MEMS LENS ALIGNMENT SYSTEM FOR FREE-SPACE OPTICAL INTERCONNECT 3
Fig. 5. Drift in position of PM rotor over 20 identically driven RTH tests (tenminimum size steps in each direction) is larger than the minimum step distance.Measurements taken with unloaded PM (no MEMS flexure).
Fig. 6. (a) Folded flexure design uses two parallel sets of beams of length L andwidth w, shown in deflected position. In this image, L = 2 mm and w = 30 μm.(b) Two folded flexure pairs are used for each axis and the ball/groove couplerstransmit PM force to the MEMS flexure.
the course of 20 RTH tests, the zero position of the PM rotor122
moved over 10 μm. Note that with 0.1 ms drive pulse, the stator123
vibration never reaches full amplitude, so the step size is likely124
to be more sensitive to stiction or other perturbations than a125
longer duration drive.126
C. MEMS Flexure Stage127
The MEMS flexure stage, as shown in Fig. 6(b), is composed128
of an inner frame, which provides y-axis movement, and an129
outer frame, which provides x-axis movement. The 20 mm ×130
20 mm device is fabricated from a 300-μm thick (1 0 0) Si131
wafer using a single-mask bulk micromachining process based132
on deep-reactive-ion etching (DRIE) through the entire wafer133
thickness. A plastic aspheric lens with focal length 12.1 mm,134
clear aperture of 4.4 mm, diameter of 6.35 mm, and mass 50 mg135
is affixed to the inner frame of the stage.136
The flexures are compliant in-plane and stiff out-of-plane. To137
avoid introducing misalignment from lens vibration, the stage138
is designed to have low sensitivity to vibrations (due to cooling139
fans, hard-drives, etc.) up to ∼1 kHz. While in-plane stiffness of140
the stage is determined primarily by coupling with the PMs, out-141
of-plane stiffness is determined by the silicon flexures design.142
A folded flexure design is used, as shown in Fig. 6(a), to avoid143
nonlinear stiffening over a large (> 100 μm) displacement range144
while maintaining a high cross-axis stiffness ratio [20]. The145
stiffness of the folded flexure suspension is given by146
keq =48ESiIz
L3 (1)
Iz =hw3
12(2)
Fig. 7. Resonance measurement of flexure stage before adding lens. Plot isamplitude of device motion measured by LDV versus excitation frequency.Inner axis resonance is at ∼487 Hz, outer axis resonance is at ∼360 Hz.
where ESi = 169 GPa is Young’s modulus for single crystal 147
silicon along the 〈1 1 0〉 crystalline axes, while h, w, and L 148
represent the height, width, and length of the individual flexure 149
beams, respectively. Because a stiffness relationship similar to 150
(1) holds for out-of-plane (z-axis) deflections, the ratio of the 151
out-of-plane to in-plane stiffnesses is approximately given by 152
(h/w)2 . The maximum value of (h/w) for defect-free DRIE 153
fabrication is 10:1, so for h = 300 μm wafer thickness, w = 154
30 μm. 155
Given the maximum rated force for each PM is 0.1 N, the stiff- 156
ness of the flexures should be no more than 400 N/m to allow 157
a full-scale lens displacement of xmax = ±250 μm to compen- 158
sate for static board-to-board misalignment [5]. At the same 159
time, it is desirable to make the flexures as stiff as possible to 160
increase the frequency of the first mechanical resonance. For the 161
prototype devices presented here, flexure length L = 2 mm was 162
selected. Substituting this value into (1) yields keq = 684 N/m, 163
allowing a maximum displacement of xmax = 146 μm assum- 164
ing Fmax = 0.1 N. 165
Experimental measurements of the flexure stiffness were per- 166
formed by mounting the MEMS device on a vibration exciter 167
and observing the motion of the inner and outer frames using 168
an LDV. Swept sine measurements performed over a frequency 169
range of 100 Hz to 1 kHz, as shown in Fig. 7, show the in-plane 170
resonances of the inner (y-axis) and outer (x-axis) frames at 171
487 and 360 Hz, respectively, corresponding to stiffnesses of 172
ky = 254 N/m and kx = 279 N/m. 173
The fabricated flexures were overetched and undercut with 174
flexure top width a = 27.5 μm, and bottom width b = 16.0 μm. 175
Iz for a trapezoidal beam cross section is given by 176
Iz=h(a + b)(a2 + b2)
48. (3)
Substituting (3) in (1) gives kcalc = 279 N/m, in good agree- 177
ment with the measured values. 178
D. MEMS/PM Coupling Device 179
Coupling the PM actuators and MEMS flexure stage requires 180
a mechanism that transmits actuator force in the direction of 181
motion but is compliant in the orthogonal direction. In surface 182
micromachined MEMS devices, this coupling has been achieved 183

IEEE
Proo
f
4 IEEE JOURNAL OF SELECTED TOPICS IN QUANTUM ELECTRONICS
Fig. 8. (a) Ball/groove coupler uses a steel ball, held in place by the magneticgroove, to transmit PM force to MEMS flexure stage in the driving directionwhile permitting unrestrained motion in the orthogonal direction. (b) Image ofball and magnets visible through MEMS stage.
by a pin-in-slot mechanism [15]. Here, the coupling relies on a184
precision steel ball bearing (Øball = 1000 ± 2.5 μm) retained185
in a magnetic groove aligned perpendicular to the driven axis,186
as shown in Fig. 8. The inner and outer frames of the stage have187
a square opening (lside = 1005 ± 5 μm) to accommodate the188
steel balls.189
Motion of the outer frame causes the inner frame ball to roll190
along the magnetic groove (and vice versa). Published data on191
the wear of silicon surfaces used to support ball bearings [21]192
suggest a high degree of reliability for the ball–silicon interface.193
The design is tolerant of translational misalignments between194
the PMs and the flexure stage, since each ball can be freely195
positioned during assembly. Two nonlinearities result from the196
design and are explored in the results section. First, clearance197
between the ball and the flexure opening results in a dead zone.198
Second, rotational misalignments between the PM coupler and199
the flexure stage result in cross-axis coupling.200
III. RESULTS201
A. FSOI Setup202
Experiments characterized the optical and mechanical perfor-203
mance of the FSOI system consisting of a source and receiver204
board separated by 50 mm. The receiver board is a 1 × 4 GaAs205
PIN PD array with a fixed lens (f = 12.1 mm), while the source206
board is a 1 × 4 VCSEL array assembled on a printed circuit207
board beneath the MEMS lens aligner, as shown in Fig. 2. Im-208
ages of the VCSEL and PD arrays, as shown in Fig. 9, show that209
both devices have a 250-μm pitch, while the active area of each210
PD is approximately 40 μm.211
Images of the VCSEL spots in the receiver focal plane were212
collected using a CMOS imager (ISG, LW5–5-1394) in place of213
the PD array. Proper alignment between the two lenses, the VC-214
SEL array, and the camera was ensured by collecting images of215
the VCSELs operating below the lasing threshold. Below thresh-216
old, satellite beams are visible around the main emission lobe;217
these beams are clearly visible when proper focus is achieved,218
as shown in Fig. 10.219
The lasing VCSEL beam profiles at the receiver plane with220
the lens aligner positioned such that the beams are near the221
Fig. 9. (a) Microscope image of four VCSEL array at 0.250 mm spacing,with inset image of single VCSEL device. (b) Microscope image of PD array at0.250 mm spacing.
Fig. 10. VCSEL array operating below threshold current in LED mode arecharacterized by satellite spots corresponding to the physical configuration ofthe device.
Fig. 11. VCSEL beam profile measurements taken on CMOS camera for fourlaser spots. The beam diameters are less than 20 μm FWHM.
center of the source lens are shown in Fig. 11. The full width 222
at 10% of maximum intensity is approximately 20 μm. Taken 223
together with the 40 μm PD diameter, the 3 dB radial alignment 224
tolerance of the system is 60 μm, requiring a minimum step size 225
of 42 μm on each axis. 226
As the lens is displaced by the aligner, the focused spots 227
show distortion due to off-axis aberrations in the lens. Fig. 12 228
is a composite image of the VCSEL array in four positions 229
separated by 250 μm. The spot at the lower right shows the 230
maximum distortion and is located ∼500 μm from the lens cen- 231
ter, representative of the position of the spot with the lens aligner 232
driven to its maximum travel in both axes. To avoid saturating 233
the camera, VCSEL images were collected with an aperture and 234
neutral density filters between the source and receiver. Clipping 235
on aperture drops the intensity of the lower right spot to ∼50% 236
of the intensity at lens center, but the beam width of the main 237

IEEE
Proo
f
YOXALL et al.: TWO-AXIS MEMS LENS ALIGNMENT SYSTEM FOR FREE-SPACE OPTICAL INTERCONNECT 5
Fig. 12. Four-by-Four composite image of VCSEL beam distortion as a func-tion of position relative to the telecentric lens pair centerline. The top inset(zoomed image of the spot in row 2, column 2) is the VCSEL beam closelyaligned with the optical axis; the bottom inset (row 4, column 4) shows thedistortion and loss of intensity for a spot ∼0.5 mm from the lens center due toaperture clipping.
Fig. 13. Eye diagrams taken at 2.5 Gb/s data rate at zero offset optical align-ment and 250 μm offset show negligible performance difference.
lobe is similar to undistorted beam width. Measurements col-238
lected with the PD array (without an aperture) showed the peak239
spot intensity varied by less than 6% over a 2.5-mm translation240
range.241
Eye diagrams at 2.5 Gb/s data transmission rate, as shown in242
Fig. 13, have negligible change in quality for a lens translation243
of 250 μm, or the full capability of the system. The eye diagrams244
are taken without any aperture in the beam path. Four parallel245
2.5 Gb/s channels provide for 10 Gb/s communication.246
B. Lens Aligner Performance247
Lens aligner performance was characterized in the FSOI setup248
with the PMs driven with 0.1 ms pulses to achieve the minimum249
step size. Fig. 14 shows overlaid images of a single VCSEL250
spot translated by lens actuation to the extreme corners of the251
MEMS/PM range. Lens motion is 1:1 with image motion on the252
target due to the telecentric lens design. The observed limits of253
travel, ±110 μm in the x-axis and ±130 μm in the y-axis, are254
consistent with a maximum PM output force of 31 and 33 mN,255
roughly 1/3 the manufacturer value.256
The variation of the step size over the full actuation range was257
measured by first driving the stage to extreme limit of travel,258
and then, stepping the lens to the opposite limit, while tracking259
the centroid of the VCSEL spot following each step command,260
as shown in Fig. 15. The observed behavior is approximated261
Fig. 14. Composite image of a single VCSEL spot showing the limits of travelfor the MEMS lens aligner.
Fig. 15. Stage motion over full range of travel. The dashed line shows thestep size predicted based on the net force on the flexure stage. Step size near thebacklash region is ∼2.2 μm.
with a model in which the step size Δ is proportional to the net 262
force acting on the stage 263
Δ = δ (Fmax − kxx) (4)
where δ is a constant of proportionality and is equal to 48 mm/N 264
for the inner axis. The PMs have nonuniform force charac- 265
teristics across the full range, with less force available when 266
operating near full stroke. The outer axis PM operates near 267
full stroke resulting in a much lower proportionality constant 268
d = 8 mm/N. At the initiation of motion, the forces from the 269
PM and the flexures are additive and the largest step size (12 μm) 270
is observed, whereas the step size diminishes to a value below 271
100 nm at the opposite extreme of travel. It was observed that 272
the position of the PM slider on the stator effects δ. One conse- 273
quence of this fact is that the displacement range is asymmetric, 274
since the slider is not centered on the stator when the flexure 275
stage is at zero deflection. 276
The backlash region of stage motion is observable in Fig. 15 277
when the stage reaches zero deflection. The size of the region is 278
calculated as the product of the slope adjacent to the backlash 279
(flat region) with the number of steps in the backlash region. 280
For the inner axis, the backlash is calculated as 15.4 μm, while 281

IEEE
Proo
f
6 IEEE JOURNAL OF SELECTED TOPICS IN QUANTUM ELECTRONICS
Fig. 16. Centroid motion of single VCSEL incident on CMOS camera forMEMS flexure stage motion in both axes, at full travel. Vertical motion cor-responds to MEMS flexure stage inner axis, horizontal motion corresponds toMEMS flexure stage outer axis.
Fig. 17. Nonlinearity in outer axis motion is due to cross-coupling of inner axisand ball/groove interaction with MEMS structure. (a) Misalignment betweenthe groove and the direction of outer axis motion causes cross-coupling intoinner axis motion. (b) and (c) Defects in the surface of the groove cause highand low energy regions through the ball travel. As the ball moves past a highenergy location, it loses contact with the left edge of the square opening in theMEMS. (d) As the ball moves to a low energy position, it remain stationaryuntil contact with the MEMS opening returns. (e) Ball will move “normally”until another defect causes nonlinear cross-coupling.
the outer axis backlash is similarly calculated to be 14.9 μm.282
Based on known variations in ball diameters and fabrication283
variations across the MEMS wafer, the expected backlash is284
12.5 μm. Measured backlash is somewhat larger than expected285
due to overetch during fabrication.286
Cross-axis coupling was measured by collecting centroid po-287
sition of a single VCSEL beam incident on the CMOS camera288
for sweeps across the lens aligner’s range in both axes. The cen-289
troid sweeps are shown in Fig. 16. Inner axis motion is fairly290
linear and free from cross-axis coupling but outer axis motion 291
has clear nonlinearities and exhibits up to 8 μm of cross-axis 292
motion. 293
The nonlinearity results from the system geometry and mag- 294
net/ball interaction as the inner axis ball/groove coupling travels 295
in its compliant axis. Fig. 17 shows how the cross-axis coupling 296
is introduced to the system. As the outer axis moves, the ball 297
rolls in the inner axis groove. Micrometer scale imperfections 298
in the groove surface impede the motion of the ball, altering its 299
position within the square opening of the MEMS stage. The ef- 300
fect of these defects is fairly repeatable as the outer axis motion 301
is cycled backward and forward, as shown in Fig. 16. 302
IV. CONCLUSION 303
A MEMS lens aligner was described that allows a 6.35-mm 304
diameter, f = 12.1 mm lens to be positioned in two axes over 305
a 260 μm × 220 μm range, a range that allows compensation 306
of static and thermal misalignments between two boards. The 307
low-cost plastic optics used are suitable for a FSOI between 308
two computer servers separated by 50 mm. The PM actuators 309
used require zero input power to maintain the alignment. The 310
largest step size, observed near the limits of travel, was 12 311
μm, approximately four times smaller than required to align the 312
20 μm VCSEL spot within the 40 μm high-speed PDs used 313
here. Measurements of the step size versus displacement sug- 314
gest that submicrometer step size could be reliably achieved 315
by increasing the stiffness of the silicon flexures, at the cost of 316
reducing the range of travel. Neglecting losses due to reflec- 317
tions from the surfaces of the nonantireflection coated lenses, 318
a maximum intensity loss of 6% was observed for a laser spot 319
positioned 500 μm from the center of the lens, representing the 320
worst case for a spot deflected to the maximum limits of travel. 321
The ball-coupling system used here showed repeatable behavior 322
and a relatively small (15 μm) backlash region near the center 323
of travel. Improved finishing of the ball-groove would reduce 324
the 8 μm cross-axis coupling observed here. 325
ACKNOWLEDGMENT 326
The authors would like to thank M.-L. Chan and G. Jaramillo 327
for their assistance with MEMS fabrication for this paper and 328
also grateful to E. Lau and J. Chou with network analysis testing. 329
REFERENCES 330
[1] H. Cho, P. Kapur, and K. C. Saraswat, “Power comparison between high- 331speed electrical and optical interconnects for interchip communication,” 332J. Lightw. Tech., vol. 22, no. 9, pp. 2021–2033, Sep. 2004. 333
[2] A. V. Krishnamoorthy, H. Ron, Z. Xuezhe, H. Schwetman, L. Jon, P. Koka, 334L. GuoLiang, I. Shubin, and J. E. Cunningham, “Computer systems based 335on silicon photonic interconnects,” Proc. IEEE, vol. 97, no. 7, pp. 1337– 3361361, Jul. 2009. 337
[3] L. J. Camp, R. Sharma, and M. R. Feldman, “Guided-wave and free- 338space optical interconnects for parallel-processing systems: A compari- 339son,” Appl. Opt., vol. 33, no. 26, pp. 6168–6180, Sep. 1994. 340
[4] A. G. Kirk, D. V. Plant, M. H. Ayliffe, M. Chateauneuf, and F. Lacroix, 341“Design rules for highly parallel free-space optical interconnects,” IEEE 342J. Sel. Top Quant. Electron., vol. 9, no. 2, pp. 531–547, Mar./Apr. 2003. 343
[5] H. P. Kuo, P. Rosenberg, R. Walmsley, S. Mathai, L. Kiyama, J. Straznicky, 344M. McLaren, M. Tan, and S.-Y. Wang, “Free-space optical links for 345

IEEE
Proo
f
YOXALL et al.: TWO-AXIS MEMS LENS ALIGNMENT SYSTEM FOR FREE-SPACE OPTICAL INTERCONNECT 7
board-to-board interconnects,” Appl. Phys. A, vol. 95, no. 4, pp. 955–346965, Jun. 2009.347
[6] K. Hirabayashi, T. Yamamoto, S. Hino, Y. Kohama, and K. Tateno, “Op-348tical beam direction compensating system for board-to-board free space349optical interconnection in high-capacity ATM switch,” J. Lightw. Tech.,350vol. 15, no. 5, pp. 874–882, May 1997.351
[7] F. Lacroix, E. Bernier, M. H. Ayliffe, F. A. P. Tooley, D. V. Plant, and352A. G. Kirk, “Implementation of a compact, four-stage, scalable optical353interconnect for photonic backplane applications,” Appl. Opt., vol. 41,354no. 8, pp. 1541–1555, Mar. 2002.355
[8] D. V. Plant, M. B. Venditti, E. Laprise, J. Faucher, K. Razavi, M. teauneuf,356A. G. Kirk, and J. S. Ahearn, “256-channel bidirectional optical intercon-357nect using VCSELs and photodiodes on CMOS,” J. Lightw. Tech., vol. 19,358no. 8, pp. 1093–1103, Aug. 2001.359
[9] C. J. Henderson, B. Robertson, D. G. Leyva, T. D. Wilkinson,360D. C. O’Brien, and G. Faulkner, “Control of a free-space adaptive op-361tical interconnect using a liquid-crystal spatial light modulator for beam362steering,” Opt. Eng., vol. 44, no. 7, pp. 075401–075408, 2005.363
[10] A. Tuantranont, V. M. Bright, J. Zhang, W. Zhang, J. A. Neff, and Y. C. Lee,364“Optical beam steering using MEMS-controllable microlens array,” Sens.365Actuator Phys., vol. 91, no. 3, pp. 363–372, Jul. 2001.366
[11] M. C. Wu and W. L. Fang, “Integrated bi-directional focusing and tracking367actuators in a monolithic device for a MEMS optical pick-up head,”368J. Micromech. Microeng., vol. 16, no. 7, pp. 1290–1297, Jul. 2006.369
[12] K. Hedsten, J. Melin, J. Bengtsson, P. Modh, D. Karlen, B. Lofving,370R. Nilsson, H. Rodjegard, K. Persson, P. Enoksson, F. Nikolajeff, and371G. Andersson, “MEMS-based VCSEL beam steering using replicated372polymer diffractive lens,” Sens. Actuator Phys., vol. 142, no. 1, pp. 336–373345, Mar. 2008.374
[13] J. Chou, K. Yu, D. Horsley, B. Yoxall, S. Mathai, M. R. T. Tan, S.-Y. Wang,375and M. C. Wu, “Robust free space board-to-board optical interconnect with376closed loop MEMS tracking,” Appl. Phys. A, vol. 95, no. 4, pp. 973–982,377Jun. 2009.378
[14] J. B. Chou, K. Yu, D. A. Horsley, S. Mathai, B. Yoxall, M. Tan,379S. Y. Wang, and M. C. Wu, “Electrothermally actuated free space board-380to-board optical interconnect with zero power hold,” in Proc. Transducers,381Denver, CO, 2009, pp. 2202–2205.382
[15] H. Toshiyoshi, G. D. Su, J. LaCosse, and M. C. Wu, “A surface micro-383machined optical scanner array using photoresist lenses fabricated by a384thermal reflow process,” J. Lightw. Tech., vol. 21, no. 7, pp. 1700–1708,385Jul. 2003.386
[16] Y. Liu, B. Robertson, G. C. Boisset, M. H. Ayliffe, R. Iyer, and D. V. Plant,387“Design, implementation, and characterization of a hybrid optical inter-388connect for a four-stage free-space optical backplane demonstrator,” Appl.389Opt., vol. 37, no. 14, pp. 2895–2914, May 1998.390
[17] D. T. Neilson and E. Schenfeld, “Plastic modules for free-space optical391interconnects,” Appl. Opt., vol. 37, no. 14, pp. 2944–2952, May 1998.392
[18] S. Sinzinger and J. Jahns, “Integrated micro-optical imaging system with393a high interconnection capacity fabricated in planar optics,” Appl. Opt.,394vol. 36, no. 20, pp. 4729–4735, Jul. 1997.395
[19] B. Watson, J. Friend, and L. Yeo, “Piezoelectric ultrasonic micro/milli-396scale actuators,” Sens. Actuator Phys., vol. 152, no. 2, pp. 219–233, Jun.3972009.398
[20] R. Legtenberg, A. W. Groeneveld, and M. Elwenspoek, “Comb-drive ac-399tuators for large displacements,” J. Micromech. Microeng., vol. 6, no. 3,400pp. 320–329, Sep. 1996.401
[21] M. McCarthy, C. M. Waits, and R. Ghodssi, “Dynamic friction and wear402in a planar-contact encapsulated microball bearing using an integrated403microturbine,” J. Microelectromech. Syst., vol. 18, no. 2, pp. 263–273,404Apr. 2009.405
Brian E. Yoxall (M’10) recieved the B.S. degree in406engineering and the M.E. degree fromHarvey Mudd407College, Claremont, CA, in 2002 and 2003, respec-408tively. He is currently working toward the Ph.D. de-409gree in the Department of Mechanical and Aeronau-410tical Engineering, University of California, Davis.411
From 2003 to 2007, he was a System Engineer at412Lockheed Martin Space Systems Company, where he413was involved in vibration control, system integration,414and system testing.415
416
Robert Walmsley, photograph and biography not available at the time of pub- 417lication. 418
419
Huei-Pei Kuo, photograph and biography not available at the time of publica- 420tion. 421
422
Shih-Yuan Wang (F’xx) received the B.S. degree in 423engineering physics in 1969, and the Ph.D. degree 424in electrical engineering and computer sciences in 4251977, both from the University of California (UC), 426Berkeley. Q2427
He was at the Space Science Laboratory on a 428K-band maser, and at the Electronic Research Lab- 429oratory on nanostructured tunneling devices at ter- 430ahertz frequencies, both at UC. In 1977, he joined 431Hewlett-Packard (HP) Company, where he was en- 432gaged first in a manufacturing division on MESFET, 433
and then, at HP Laboratories, Palo Alto, CA, and was involved in vertical cavity 434surface-emitting lasers, photodetectors, modulators, GaN light-emitting diodes, 435nanophotonics/electronics, and nanowire devices with a short break at a startup. 436
Dr. Wang is a Fellow of the Optical Society of America. 437438
Mike Tan, photograph and biography not available at the time of publication. 439440
David A. Horsley (M’97) received the B.S., M.S., 441and Ph.D. degrees in mechanical engineering from 442the University of California (UC), Berkeley, in 1992, 4431994, and 1998, respectively. 444
He is currently an Associate Professor in the De- 445partment of Mechanical and Aerospace Engineering, 446UC, Davis, where he has been a Co-Director of the 447Berkeley Sensor and Actuator Center since 2005. He 448also held research and development positions at Di- 449con Fiberoptics, Hewlett-Packard Laboratories, and 450Onix Microsystems. His research interests include 451
microfabricated sensors and actuators with applications in optical microelec- 452tromechanical system, communication, displays, and biological sensors. 453
Prof. Horsley is a recipient of the National Science Foundation CAREER 454Award and the UC Davis College of Engineering’s Outstanding Junior Faculty 455Award. 456
457

IEEE
Proo
f
QUERIES458
Q1: Author: Please provide the Grant/project no. provided by Hewlett-Packard .459
Q2. Author: Please provide the year in which Shih-Yuan Wang became “Fellow member” of the IEEE.460

IEEE
Proo
f
IEEE JOURNAL OF SELECTED TOPICS IN QUANTUM ELECTRONICS 1
Two-Axis MEMS Lens Alignment System forFree-Space Optical Interconnect
1
2
Brian E. Yoxall, Member, IEEE, Robert Walmsley, Huei-Pei Kuo, Shih-Yuan Wang, Fellow, IEEE, Mike Tan,and David A. Horsley, Member, IEEE
3
4
Abstract—We present a two-axis microelectromechanical sys-5tems (MEMS) lens aligner with a 260 μm × 220 μm transla-6tion range that positions a 6.35 mm lens with focal length f =712.1 mm for alignment compensation of free-space optical inter-8connects (FSOIs) between computer servers separated by 50 mm9spacing. Efficient ultrasonic linear piezoelectric motors (PMs) pro-10vide actuation with zero power required to hold the lens alignment.11A four-channel FSOI is demonstrated with 1 × 4 vertical cavity12surface-emitting laser (VCSEL) and photodiode (PD) arrays capa-13ble of 10 Gb/s transmission bandwidth. Demonstrated minimum14step size of 1.68 μm is sufficient for aligning the 20 μm VCSEL15spots onto the 40 μm PD receivers. Force transmission between16PMs and a silicon MEMS flexure stage is accomplished using a171-mm steel ball bearing in a magnetic groove, providing compli-18ance in the nondriven axis. The ball-coupling design has 15 μm19backlash and induces a maximum of 8 μm of cross-axis motion.20
Index Terms—Alignment stage, microelectromechanical systems21(MEMS), optical interconnect, piezoelectric ultrasonic stepper mo-22tor, two-axis actuator.23
I. INTRODUCTION24
BANDWIDTH capacity and high power consumption are25
fundamental limitations of the traditional copper-wire-26
based communication in computer servers. At very high band-27
widths, optical interconnects will require less power to operate28
than copper data paths [1]. Optical interconnects are already29
widely used at the cabinet level in data centers and are promis-30
ing candidates for on-chip interconnects in future microproces-31
sors [2]. Here, we consider the problem of creating free-space32
optical interconnect (FSOI) at the board-to-board level. In com-33
parison to interconnects using on-board waveguides routed to34
an optical backplane, FSOI offers the advantages of high den-35
sity [3] and lower board and backplane cost, but requires active36
multiaxis alignment to achieve efficient optical coupling from37
source to receiver [4]. The causes of source–receiver misalign-38
ment include vibration, thermal shifts, and static misalignment39
between the two server boards. Experimental measurements of40
Manuscript received June 26, 2010; revised September 18, 2010; acceptedSeptember 13, 2010. This work was supported by Hewlett-Packard.
Q1 B. E. Yoxall and D. A. Horsley are with the Department of Mechanicaland Aerospace Engineering, University of California, Davis, CA 95616 USA(e-mail: [email protected]; [email protected]).
R. Walmsley, H. Kuo, S. Y. Wang, and M. Tan are with Hewlett-PackardLaboratory, Palo Alto, CA 94304 USA (e-mail: [email protected];[email protected]; [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/JSTQE.2010.2089043
a typical server chassis [5] show static misalignment (∼250 μm) 41
is considerably greater than thermal shift (∼20 μm upon pow- 42
ering on the server) or mechanical vibration (<1 μm). As a 43
result, continuous dynamic correction is not required; instead, 44
the ideal alignment system would correct the alignment once 45
(upon installation or replacement of the server), after which the 46
alignment would be retained with zero power consumption. 47
Earlier approaches to alignment systems for board-to-board 48
FSOI have included bulk prisms [6], beam splitters [7], mechan- 49
ical translation stages [8], liquid crystal beam steering [9], and 50
optical microelectromechanical systems (MEMS) devices [10]. 51
Among these, optical MEMS technology is attractive because it 52
allows wafer-scale batch fabrication of low-cost devices. Many 53
existing two-axis MEMS lens scanner designs require constant 54
power to maintain lens position [11], have a limited correction 55
range [12], or have a relatively small lens diameter [13], making 56
them incapable of aligning an array of lasers over the 50-mm 57
distance separating two boards in a modern server chassis. 58
Here, we describe a MEMS-based low-power active align- 59
ment system for FSOI using a piezoelectrically actuated lens 60
to align vertical cavity surface-emitting laser (VCSEL) arrays 61
to receiver photodiodes (PDs). The piezoelectric stepper motor 62
technology used here consumes less than 250 mW in full-power 63
operation and requires zero power to maintain static alignment, 64
similar to recent MEMS stepper motor designs [14], [15]. Unlike 65
many earlier MEMS lens alignment systems, the bulk microma- 66
chined stage described here is suitable for positioning a large 67
6.35-mm diameter lens, allowing the alignment of 1× 4 VCSEL 68
arrays over a 50-mm link distance. 69
II. DESIGN 70
A. Device and Test Setup 71
The lens aligner is a 1.3 cm × 3.3 cm × 3.3 cm assembly of 72
a silicon MEMS flexure stage, a plastic aspheric lens, and two 73
piezoelectric motors (PMs), as shown in Fig. 1. The spacing 74
and alignment of the flexure stage and PMs is provided by 75
an aluminum mounting block. Force is transmitted between 76
the MEMS flexure and PMs by a ball/groove device, which 77
decouples the two translation axes, as described in Section II-D. 78
The board-to-board schematic is shown in Fig. 2. The MEMS 79
aligner translates the first lens of a telecentric lens pair to posi- 80
tion VCSEL beams to the PD array. The position information 81
from the PD array is used for feedback control. The telecen- 82
tric lens configuration reduces distortion and sensitivity to axial 83
misalignment and board-to-board spacing variation [16]–[18]. 84
1077-260X/$26.00 © 2010 IEEE

IEEE
Proo
f
2 IEEE JOURNAL OF SELECTED TOPICS IN QUANTUM ELECTRONICS
Fig. 1. Assembly schematic for complete two-axis lens aligner includingmonolithic mount, PMs and ball/groove couplers, MEMS flexure stage, as-pheric lens, and PC Board.
Fig. 2. Test setup to demonstrate feedback control of the MEMS/FSOI align-ment correction device. The primary components are VCSEL source, MEMSlens aligner, receiver lens, and PD array.
B. Piezoelectric Stepper Motor Characterization85
Ultrasonic PMs are ideal for MEMS actuation due to their86
high driving force, large stroke, small incremental motion, and87
low power requirements [19]. The PMs used here (PI-652,88
Physik Instrumente) are 9 mm × 5.4 mm linear motors with89
3-mm actuation range and minimum step size less than 1 mm.90
The PM has a maximum actuating force of 0.1 N and a frictional91
hold force of 0.2 N when not driven. The PM consists of a mov-92
ing carriage/slider mounted on a resonating piezoelectric stator,93
as shown in Fig. 3. Electrodes on the two halves of the stator94
allow excitation at its resonant frequency (450 kHz), causing the95
carriage to travel toward the right or left, depending on which96
Fig. 3. PM image showing the piezoelectric stator and steel carriage/slider.The stator operates in a resonant mode that incrementally moves the slider aslittle as ∼1 μm.
Fig. 4. (a) Step size as a function of drive pulse duration. (b) LDV measure-ment on oscilloscope of PM vibration during a drive cycle, showing ring uptime ∼0.15 ms. The minimum drive pulse is 0.1 ms, during which time, the PMvibration never reaches full amplitude, but it is sufficient to cause slider motion.
electrode is driven. The duration of the sinusoidal excitation sig- 97
nal is gated using a TTL input pulse signal. As described later, 98
the carriage actuation distance is a function of the duration and 99
amplitude of excitation as well as the load and position on the 100
stator. 101
To characterize the mechanical behavior of the PM, a laser 102
Doppler vibrometer (LDV) was used to measure the time- 103
dependent displacement of the stator edge in response to a 104
0.5-ms pulse input. As shown in Fig. 4(b), the steady-state vi- 105
bration amplitude is reached 150 μs after the start of excitation, 106
corresponding to a mechanical quality factor Q ∼ 100. LDV 107
measurements collected at varying supply voltages showed that 108
the vibration amplitude scaled in proportion to the supply volt- 109
age. Carriage motion is small until the vibration is near the 110
steady-state amplitude, thus the minimum excitation pulse is 111
0.1 ms. Measurements collected at a supply voltage of 3.4 V for 112
0.1, 0.2, and 0.3 ms excitation pulses showed a nearly linear de- 113
pendence of the motion on the pulse duration, with a minimum 114
step size of 1.68 μm, as shown in Fig. 4(a). Similarly, varying 115
the supply voltage from 3.4 to 5 V for a constant 0.1 ms pulse 116
duration resulted in a nearly linearly increase in the minimum 117
step size from 1.68 to 11 μm. 118
As a measure of the repeatability of positioning, Fig. 5 shows 119
a return-to-home (RTH) test in which the PM was driven at 120
the minimum step size for ten steps in each direction. Over 121

IEEE
Proo
f
YOXALL et al.: TWO-AXIS MEMS LENS ALIGNMENT SYSTEM FOR FREE-SPACE OPTICAL INTERCONNECT 3
Fig. 5. Drift in position of PM rotor over 20 identically driven RTH tests (tenminimum size steps in each direction) is larger than the minimum step distance.Measurements taken with unloaded PM (no MEMS flexure).
Fig. 6. (a) Folded flexure design uses two parallel sets of beams of length L andwidth w, shown in deflected position. In this image, L = 2 mm and w = 30 μm.(b) Two folded flexure pairs are used for each axis and the ball/groove couplerstransmit PM force to the MEMS flexure.
the course of 20 RTH tests, the zero position of the PM rotor122
moved over 10 μm. Note that with 0.1 ms drive pulse, the stator123
vibration never reaches full amplitude, so the step size is likely124
to be more sensitive to stiction or other perturbations than a125
longer duration drive.126
C. MEMS Flexure Stage127
The MEMS flexure stage, as shown in Fig. 6(b), is composed128
of an inner frame, which provides y-axis movement, and an129
outer frame, which provides x-axis movement. The 20 mm ×130
20 mm device is fabricated from a 300-μm thick (1 0 0) Si131
wafer using a single-mask bulk micromachining process based132
on deep-reactive-ion etching (DRIE) through the entire wafer133
thickness. A plastic aspheric lens with focal length 12.1 mm,134
clear aperture of 4.4 mm, diameter of 6.35 mm, and mass 50 mg135
is affixed to the inner frame of the stage.136
The flexures are compliant in-plane and stiff out-of-plane. To137
avoid introducing misalignment from lens vibration, the stage138
is designed to have low sensitivity to vibrations (due to cooling139
fans, hard-drives, etc.) up to ∼1 kHz. While in-plane stiffness of140
the stage is determined primarily by coupling with the PMs, out-141
of-plane stiffness is determined by the silicon flexures design.142
A folded flexure design is used, as shown in Fig. 6(a), to avoid143
nonlinear stiffening over a large (> 100 μm) displacement range144
while maintaining a high cross-axis stiffness ratio [20]. The145
stiffness of the folded flexure suspension is given by146
keq =48ESiIz
L3 (1)
Iz =hw3
12(2)
Fig. 7. Resonance measurement of flexure stage before adding lens. Plot isamplitude of device motion measured by LDV versus excitation frequency.Inner axis resonance is at ∼487 Hz, outer axis resonance is at ∼360 Hz.
where ESi = 169 GPa is Young’s modulus for single crystal 147
silicon along the 〈1 1 0〉 crystalline axes, while h, w, and L 148
represent the height, width, and length of the individual flexure 149
beams, respectively. Because a stiffness relationship similar to 150
(1) holds for out-of-plane (z-axis) deflections, the ratio of the 151
out-of-plane to in-plane stiffnesses is approximately given by 152
(h/w)2 . The maximum value of (h/w) for defect-free DRIE 153
fabrication is 10:1, so for h = 300 μm wafer thickness, w = 154
30 μm. 155
Given the maximum rated force for each PM is 0.1 N, the stiff- 156
ness of the flexures should be no more than 400 N/m to allow 157
a full-scale lens displacement of xmax = ±250 μm to compen- 158
sate for static board-to-board misalignment [5]. At the same 159
time, it is desirable to make the flexures as stiff as possible to 160
increase the frequency of the first mechanical resonance. For the 161
prototype devices presented here, flexure length L = 2 mm was 162
selected. Substituting this value into (1) yields keq = 684 N/m, 163
allowing a maximum displacement of xmax = 146 μm assum- 164
ing Fmax = 0.1 N. 165
Experimental measurements of the flexure stiffness were per- 166
formed by mounting the MEMS device on a vibration exciter 167
and observing the motion of the inner and outer frames using 168
an LDV. Swept sine measurements performed over a frequency 169
range of 100 Hz to 1 kHz, as shown in Fig. 7, show the in-plane 170
resonances of the inner (y-axis) and outer (x-axis) frames at 171
487 and 360 Hz, respectively, corresponding to stiffnesses of 172
ky = 254 N/m and kx = 279 N/m. 173
The fabricated flexures were overetched and undercut with 174
flexure top width a = 27.5 μm, and bottom width b = 16.0 μm. 175
Iz for a trapezoidal beam cross section is given by 176
Iz=h(a + b)(a2 + b2)
48. (3)
Substituting (3) in (1) gives kcalc = 279 N/m, in good agree- 177
ment with the measured values. 178
D. MEMS/PM Coupling Device 179
Coupling the PM actuators and MEMS flexure stage requires 180
a mechanism that transmits actuator force in the direction of 181
motion but is compliant in the orthogonal direction. In surface 182
micromachined MEMS devices, this coupling has been achieved 183

IEEE
Proo
f
4 IEEE JOURNAL OF SELECTED TOPICS IN QUANTUM ELECTRONICS
Fig. 8. (a) Ball/groove coupler uses a steel ball, held in place by the magneticgroove, to transmit PM force to MEMS flexure stage in the driving directionwhile permitting unrestrained motion in the orthogonal direction. (b) Image ofball and magnets visible through MEMS stage.
by a pin-in-slot mechanism [15]. Here, the coupling relies on a184
precision steel ball bearing (Øball = 1000 ± 2.5 μm) retained185
in a magnetic groove aligned perpendicular to the driven axis,186
as shown in Fig. 8. The inner and outer frames of the stage have187
a square opening (lside = 1005 ± 5 μm) to accommodate the188
steel balls.189
Motion of the outer frame causes the inner frame ball to roll190
along the magnetic groove (and vice versa). Published data on191
the wear of silicon surfaces used to support ball bearings [21]192
suggest a high degree of reliability for the ball–silicon interface.193
The design is tolerant of translational misalignments between194
the PMs and the flexure stage, since each ball can be freely195
positioned during assembly. Two nonlinearities result from the196
design and are explored in the results section. First, clearance197
between the ball and the flexure opening results in a dead zone.198
Second, rotational misalignments between the PM coupler and199
the flexure stage result in cross-axis coupling.200
III. RESULTS201
A. FSOI Setup202
Experiments characterized the optical and mechanical perfor-203
mance of the FSOI system consisting of a source and receiver204
board separated by 50 mm. The receiver board is a 1 × 4 GaAs205
PIN PD array with a fixed lens (f = 12.1 mm), while the source206
board is a 1 × 4 VCSEL array assembled on a printed circuit207
board beneath the MEMS lens aligner, as shown in Fig. 2. Im-208
ages of the VCSEL and PD arrays, as shown in Fig. 9, show that209
both devices have a 250-μm pitch, while the active area of each210
PD is approximately 40 μm.211
Images of the VCSEL spots in the receiver focal plane were212
collected using a CMOS imager (ISG, LW5–5-1394) in place of213
the PD array. Proper alignment between the two lenses, the VC-214
SEL array, and the camera was ensured by collecting images of215
the VCSELs operating below the lasing threshold. Below thresh-216
old, satellite beams are visible around the main emission lobe;217
these beams are clearly visible when proper focus is achieved,218
as shown in Fig. 10.219
The lasing VCSEL beam profiles at the receiver plane with220
the lens aligner positioned such that the beams are near the221
Fig. 9. (a) Microscope image of four VCSEL array at 0.250 mm spacing,with inset image of single VCSEL device. (b) Microscope image of PD array at0.250 mm spacing.
Fig. 10. VCSEL array operating below threshold current in LED mode arecharacterized by satellite spots corresponding to the physical configuration ofthe device.
Fig. 11. VCSEL beam profile measurements taken on CMOS camera for fourlaser spots. The beam diameters are less than 20 μm FWHM.
center of the source lens are shown in Fig. 11. The full width 222
at 10% of maximum intensity is approximately 20 μm. Taken 223
together with the 40 μm PD diameter, the 3 dB radial alignment 224
tolerance of the system is 60 μm, requiring a minimum step size 225
of 42 μm on each axis. 226
As the lens is displaced by the aligner, the focused spots 227
show distortion due to off-axis aberrations in the lens. Fig. 12 228
is a composite image of the VCSEL array in four positions 229
separated by 250 μm. The spot at the lower right shows the 230
maximum distortion and is located ∼500 μm from the lens cen- 231
ter, representative of the position of the spot with the lens aligner 232
driven to its maximum travel in both axes. To avoid saturating 233
the camera, VCSEL images were collected with an aperture and 234
neutral density filters between the source and receiver. Clipping 235
on aperture drops the intensity of the lower right spot to ∼50% 236
of the intensity at lens center, but the beam width of the main 237

IEEE
Proo
f
YOXALL et al.: TWO-AXIS MEMS LENS ALIGNMENT SYSTEM FOR FREE-SPACE OPTICAL INTERCONNECT 5
Fig. 12. Four-by-Four composite image of VCSEL beam distortion as a func-tion of position relative to the telecentric lens pair centerline. The top inset(zoomed image of the spot in row 2, column 2) is the VCSEL beam closelyaligned with the optical axis; the bottom inset (row 4, column 4) shows thedistortion and loss of intensity for a spot ∼0.5 mm from the lens center due toaperture clipping.
Fig. 13. Eye diagrams taken at 2.5 Gb/s data rate at zero offset optical align-ment and 250 μm offset show negligible performance difference.
lobe is similar to undistorted beam width. Measurements col-238
lected with the PD array (without an aperture) showed the peak239
spot intensity varied by less than 6% over a 2.5-mm translation240
range.241
Eye diagrams at 2.5 Gb/s data transmission rate, as shown in242
Fig. 13, have negligible change in quality for a lens translation243
of 250 μm, or the full capability of the system. The eye diagrams244
are taken without any aperture in the beam path. Four parallel245
2.5 Gb/s channels provide for 10 Gb/s communication.246
B. Lens Aligner Performance247
Lens aligner performance was characterized in the FSOI setup248
with the PMs driven with 0.1 ms pulses to achieve the minimum249
step size. Fig. 14 shows overlaid images of a single VCSEL250
spot translated by lens actuation to the extreme corners of the251
MEMS/PM range. Lens motion is 1:1 with image motion on the252
target due to the telecentric lens design. The observed limits of253
travel, ±110 μm in the x-axis and ±130 μm in the y-axis, are254
consistent with a maximum PM output force of 31 and 33 mN,255
roughly 1/3 the manufacturer value.256
The variation of the step size over the full actuation range was257
measured by first driving the stage to extreme limit of travel,258
and then, stepping the lens to the opposite limit, while tracking259
the centroid of the VCSEL spot following each step command,260
as shown in Fig. 15. The observed behavior is approximated261
Fig. 14. Composite image of a single VCSEL spot showing the limits of travelfor the MEMS lens aligner.
Fig. 15. Stage motion over full range of travel. The dashed line shows thestep size predicted based on the net force on the flexure stage. Step size near thebacklash region is ∼2.2 μm.
with a model in which the step size Δ is proportional to the net 262
force acting on the stage 263
Δ = δ (Fmax − kxx) (4)
where δ is a constant of proportionality and is equal to 48 mm/N 264
for the inner axis. The PMs have nonuniform force charac- 265
teristics across the full range, with less force available when 266
operating near full stroke. The outer axis PM operates near 267
full stroke resulting in a much lower proportionality constant 268
d = 8 mm/N. At the initiation of motion, the forces from the 269
PM and the flexures are additive and the largest step size (12 μm) 270
is observed, whereas the step size diminishes to a value below 271
100 nm at the opposite extreme of travel. It was observed that 272
the position of the PM slider on the stator effects δ. One conse- 273
quence of this fact is that the displacement range is asymmetric, 274
since the slider is not centered on the stator when the flexure 275
stage is at zero deflection. 276
The backlash region of stage motion is observable in Fig. 15 277
when the stage reaches zero deflection. The size of the region is 278
calculated as the product of the slope adjacent to the backlash 279
(flat region) with the number of steps in the backlash region. 280
For the inner axis, the backlash is calculated as 15.4 μm, while 281

IEEE
Proo
f
6 IEEE JOURNAL OF SELECTED TOPICS IN QUANTUM ELECTRONICS
Fig. 16. Centroid motion of single VCSEL incident on CMOS camera forMEMS flexure stage motion in both axes, at full travel. Vertical motion cor-responds to MEMS flexure stage inner axis, horizontal motion corresponds toMEMS flexure stage outer axis.
Fig. 17. Nonlinearity in outer axis motion is due to cross-coupling of inner axisand ball/groove interaction with MEMS structure. (a) Misalignment betweenthe groove and the direction of outer axis motion causes cross-coupling intoinner axis motion. (b) and (c) Defects in the surface of the groove cause highand low energy regions through the ball travel. As the ball moves past a highenergy location, it loses contact with the left edge of the square opening in theMEMS. (d) As the ball moves to a low energy position, it remain stationaryuntil contact with the MEMS opening returns. (e) Ball will move “normally”until another defect causes nonlinear cross-coupling.
the outer axis backlash is similarly calculated to be 14.9 μm.282
Based on known variations in ball diameters and fabrication283
variations across the MEMS wafer, the expected backlash is284
12.5 μm. Measured backlash is somewhat larger than expected285
due to overetch during fabrication.286
Cross-axis coupling was measured by collecting centroid po-287
sition of a single VCSEL beam incident on the CMOS camera288
for sweeps across the lens aligner’s range in both axes. The cen-289
troid sweeps are shown in Fig. 16. Inner axis motion is fairly290
linear and free from cross-axis coupling but outer axis motion 291
has clear nonlinearities and exhibits up to 8 μm of cross-axis 292
motion. 293
The nonlinearity results from the system geometry and mag- 294
net/ball interaction as the inner axis ball/groove coupling travels 295
in its compliant axis. Fig. 17 shows how the cross-axis coupling 296
is introduced to the system. As the outer axis moves, the ball 297
rolls in the inner axis groove. Micrometer scale imperfections 298
in the groove surface impede the motion of the ball, altering its 299
position within the square opening of the MEMS stage. The ef- 300
fect of these defects is fairly repeatable as the outer axis motion 301
is cycled backward and forward, as shown in Fig. 16. 302
IV. CONCLUSION 303
A MEMS lens aligner was described that allows a 6.35-mm 304
diameter, f = 12.1 mm lens to be positioned in two axes over 305
a 260 μm × 220 μm range, a range that allows compensation 306
of static and thermal misalignments between two boards. The 307
low-cost plastic optics used are suitable for a FSOI between 308
two computer servers separated by 50 mm. The PM actuators 309
used require zero input power to maintain the alignment. The 310
largest step size, observed near the limits of travel, was 12 311
μm, approximately four times smaller than required to align the 312
20 μm VCSEL spot within the 40 μm high-speed PDs used 313
here. Measurements of the step size versus displacement sug- 314
gest that submicrometer step size could be reliably achieved 315
by increasing the stiffness of the silicon flexures, at the cost of 316
reducing the range of travel. Neglecting losses due to reflec- 317
tions from the surfaces of the nonantireflection coated lenses, 318
a maximum intensity loss of 6% was observed for a laser spot 319
positioned 500 μm from the center of the lens, representing the 320
worst case for a spot deflected to the maximum limits of travel. 321
The ball-coupling system used here showed repeatable behavior 322
and a relatively small (15 μm) backlash region near the center 323
of travel. Improved finishing of the ball-groove would reduce 324
the 8 μm cross-axis coupling observed here. 325
ACKNOWLEDGMENT 326
The authors would like to thank M.-L. Chan and G. Jaramillo 327
for their assistance with MEMS fabrication for this paper and 328
also grateful to E. Lau and J. Chou with network analysis testing. 329
REFERENCES 330
[1] H. Cho, P. Kapur, and K. C. Saraswat, “Power comparison between high- 331speed electrical and optical interconnects for interchip communication,” 332J. Lightw. Tech., vol. 22, no. 9, pp. 2021–2033, Sep. 2004. 333
[2] A. V. Krishnamoorthy, H. Ron, Z. Xuezhe, H. Schwetman, L. Jon, P. Koka, 334L. GuoLiang, I. Shubin, and J. E. Cunningham, “Computer systems based 335on silicon photonic interconnects,” Proc. IEEE, vol. 97, no. 7, pp. 1337– 3361361, Jul. 2009. 337
[3] L. J. Camp, R. Sharma, and M. R. Feldman, “Guided-wave and free- 338space optical interconnects for parallel-processing systems: A compari- 339son,” Appl. Opt., vol. 33, no. 26, pp. 6168–6180, Sep. 1994. 340
[4] A. G. Kirk, D. V. Plant, M. H. Ayliffe, M. Chateauneuf, and F. Lacroix, 341“Design rules for highly parallel free-space optical interconnects,” IEEE 342J. Sel. Top Quant. Electron., vol. 9, no. 2, pp. 531–547, Mar./Apr. 2003. 343
[5] H. P. Kuo, P. Rosenberg, R. Walmsley, S. Mathai, L. Kiyama, J. Straznicky, 344M. McLaren, M. Tan, and S.-Y. Wang, “Free-space optical links for 345

IEEE
Proo
f
YOXALL et al.: TWO-AXIS MEMS LENS ALIGNMENT SYSTEM FOR FREE-SPACE OPTICAL INTERCONNECT 7
board-to-board interconnects,” Appl. Phys. A, vol. 95, no. 4, pp. 955–346965, Jun. 2009.347
[6] K. Hirabayashi, T. Yamamoto, S. Hino, Y. Kohama, and K. Tateno, “Op-348tical beam direction compensating system for board-to-board free space349optical interconnection in high-capacity ATM switch,” J. Lightw. Tech.,350vol. 15, no. 5, pp. 874–882, May 1997.351
[7] F. Lacroix, E. Bernier, M. H. Ayliffe, F. A. P. Tooley, D. V. Plant, and352A. G. Kirk, “Implementation of a compact, four-stage, scalable optical353interconnect for photonic backplane applications,” Appl. Opt., vol. 41,354no. 8, pp. 1541–1555, Mar. 2002.355
[8] D. V. Plant, M. B. Venditti, E. Laprise, J. Faucher, K. Razavi, M. teauneuf,356A. G. Kirk, and J. S. Ahearn, “256-channel bidirectional optical intercon-357nect using VCSELs and photodiodes on CMOS,” J. Lightw. Tech., vol. 19,358no. 8, pp. 1093–1103, Aug. 2001.359
[9] C. J. Henderson, B. Robertson, D. G. Leyva, T. D. Wilkinson,360D. C. O’Brien, and G. Faulkner, “Control of a free-space adaptive op-361tical interconnect using a liquid-crystal spatial light modulator for beam362steering,” Opt. Eng., vol. 44, no. 7, pp. 075401–075408, 2005.363
[10] A. Tuantranont, V. M. Bright, J. Zhang, W. Zhang, J. A. Neff, and Y. C. Lee,364“Optical beam steering using MEMS-controllable microlens array,” Sens.365Actuator Phys., vol. 91, no. 3, pp. 363–372, Jul. 2001.366
[11] M. C. Wu and W. L. Fang, “Integrated bi-directional focusing and tracking367actuators in a monolithic device for a MEMS optical pick-up head,”368J. Micromech. Microeng., vol. 16, no. 7, pp. 1290–1297, Jul. 2006.369
[12] K. Hedsten, J. Melin, J. Bengtsson, P. Modh, D. Karlen, B. Lofving,370R. Nilsson, H. Rodjegard, K. Persson, P. Enoksson, F. Nikolajeff, and371G. Andersson, “MEMS-based VCSEL beam steering using replicated372polymer diffractive lens,” Sens. Actuator Phys., vol. 142, no. 1, pp. 336–373345, Mar. 2008.374
[13] J. Chou, K. Yu, D. Horsley, B. Yoxall, S. Mathai, M. R. T. Tan, S.-Y. Wang,375and M. C. Wu, “Robust free space board-to-board optical interconnect with376closed loop MEMS tracking,” Appl. Phys. A, vol. 95, no. 4, pp. 973–982,377Jun. 2009.378
[14] J. B. Chou, K. Yu, D. A. Horsley, S. Mathai, B. Yoxall, M. Tan,379S. Y. Wang, and M. C. Wu, “Electrothermally actuated free space board-380to-board optical interconnect with zero power hold,” in Proc. Transducers,381Denver, CO, 2009, pp. 2202–2205.382
[15] H. Toshiyoshi, G. D. Su, J. LaCosse, and M. C. Wu, “A surface micro-383machined optical scanner array using photoresist lenses fabricated by a384thermal reflow process,” J. Lightw. Tech., vol. 21, no. 7, pp. 1700–1708,385Jul. 2003.386
[16] Y. Liu, B. Robertson, G. C. Boisset, M. H. Ayliffe, R. Iyer, and D. V. Plant,387“Design, implementation, and characterization of a hybrid optical inter-388connect for a four-stage free-space optical backplane demonstrator,” Appl.389Opt., vol. 37, no. 14, pp. 2895–2914, May 1998.390
[17] D. T. Neilson and E. Schenfeld, “Plastic modules for free-space optical391interconnects,” Appl. Opt., vol. 37, no. 14, pp. 2944–2952, May 1998.392
[18] S. Sinzinger and J. Jahns, “Integrated micro-optical imaging system with393a high interconnection capacity fabricated in planar optics,” Appl. Opt.,394vol. 36, no. 20, pp. 4729–4735, Jul. 1997.395
[19] B. Watson, J. Friend, and L. Yeo, “Piezoelectric ultrasonic micro/milli-396scale actuators,” Sens. Actuator Phys., vol. 152, no. 2, pp. 219–233, Jun.3972009.398
[20] R. Legtenberg, A. W. Groeneveld, and M. Elwenspoek, “Comb-drive ac-399tuators for large displacements,” J. Micromech. Microeng., vol. 6, no. 3,400pp. 320–329, Sep. 1996.401
[21] M. McCarthy, C. M. Waits, and R. Ghodssi, “Dynamic friction and wear402in a planar-contact encapsulated microball bearing using an integrated403microturbine,” J. Microelectromech. Syst., vol. 18, no. 2, pp. 263–273,404Apr. 2009.405
Brian E. Yoxall (M’10) recieved the B.S. degree in406engineering and the M.E. degree fromHarvey Mudd407College, Claremont, CA, in 2002 and 2003, respec-408tively. He is currently working toward the Ph.D. de-409gree in the Department of Mechanical and Aeronau-410tical Engineering, University of California, Davis.411
From 2003 to 2007, he was a System Engineer at412Lockheed Martin Space Systems Company, where he413was involved in vibration control, system integration,414and system testing.415
416
Robert Walmsley, photograph and biography not available at the time of pub- 417lication. 418
419
Huei-Pei Kuo, photograph and biography not available at the time of publica- 420tion. 421
422
Shih-Yuan Wang (F’xx) received the B.S. degree in 423engineering physics in 1969, and the Ph.D. degree 424in electrical engineering and computer sciences in 4251977, both from the University of California (UC), 426Berkeley. Q2427
He was at the Space Science Laboratory on a 428K-band maser, and at the Electronic Research Lab- 429oratory on nanostructured tunneling devices at ter- 430ahertz frequencies, both at UC. In 1977, he joined 431Hewlett-Packard (HP) Company, where he was en- 432gaged first in a manufacturing division on MESFET, 433
and then, at HP Laboratories, Palo Alto, CA, and was involved in vertical cavity 434surface-emitting lasers, photodetectors, modulators, GaN light-emitting diodes, 435nanophotonics/electronics, and nanowire devices with a short break at a startup. 436
Dr. Wang is a Fellow of the Optical Society of America. 437438
Mike Tan, photograph and biography not available at the time of publication. 439440
David A. Horsley (M’97) received the B.S., M.S., 441and Ph.D. degrees in mechanical engineering from 442the University of California (UC), Berkeley, in 1992, 4431994, and 1998, respectively. 444
He is currently an Associate Professor in the De- 445partment of Mechanical and Aerospace Engineering, 446UC, Davis, where he has been a Co-Director of the 447Berkeley Sensor and Actuator Center since 2005. He 448also held research and development positions at Di- 449con Fiberoptics, Hewlett-Packard Laboratories, and 450Onix Microsystems. His research interests include 451
microfabricated sensors and actuators with applications in optical microelec- 452tromechanical system, communication, displays, and biological sensors. 453
Prof. Horsley is a recipient of the National Science Foundation CAREER 454Award and the UC Davis College of Engineering’s Outstanding Junior Faculty 455Award. 456
457

IEEE
Proo
f
QUERIES458
Q1: Author: Please provide the Grant/project no. provided by Hewlett-Packard .459
Q2. Author: Please provide the year in which Shih-Yuan Wang became “Fellow member” of the IEEE.460