
Trigonometry - Wiley: Home trigonometric functions sin(x), cos(x) and tan(x) are defined in terms of...
74
2 Trigonometry 2.1 Kick off with CAS 2.2 Reciprocal trigonometric functions 2.3 Trigonometric identities using reciprocal trigonometric functions 2.4 Compound-angle formulas 2.5 Double-angle formulas 2.6 Inverse trigonometric functions 2.7 General solutions of trigonometric equations 2.8 Graphs of reciprocal trigonometric functions 2.9 Graphs of inverse trigonometric functions 2.10 Review UNCORRECTED PAGE PROOFS
-
Upload
phungthien -
Category
Documents
-
view
237 -
download
1
Transcript of Trigonometry - Wiley: Home trigonometric functions sin(x), cos(x) and tan(x) are defined in terms of...

2Trigonometry
2.1 Kick off with CAS
2.2 Reciprocal trigonometric functions
2.3 Trigonometric identities using reciprocal trigonometric functions
2.4 Compound-angle formulas
2.5 Double-angle formulas
2.6 Inverse trigonometric functions
2.7 General solutions of trigonometric equations
2.8 Graphs of reciprocal trigonometric functions
2.9 Graphs of inverse trigonometric functions
2.10 Review
c02Trigonometry.indd 56 20/08/15 10:40 AM
UNCORRECTED PAGE P
ROOFS

Please refer to the Resources tab in the Prelims section of your eBookPlUs for a comprehensive step-by-step guide on how to use your CAS technology.
2.1 Kick off with CASExploring inverse trigonometric functions
In this topic, we will investigate the inverse trigonometric functions.
1 Using CAS, determine each of the following. Remember to have the calculator in radians mode.
a cos−1 acosa2
5bb
b cos−1(cos(3))
c cos−1(cos(6))
d cos−1 acosaπ
7bb
e cos−1 acosa8π
7bb
f cos−1 acosa4π
3bb
g cos−1(cos(−π ) )
For what values of x is cos−1(cos(x) ) = x? Confi rm your result using CAS.
2 Using CAS, determine each of the following.
a tan−1 atana1
3bb b tan−1
atana−45bb
c tan−1( tan(6) ) d tan−1 atanaπ
5bb
e tan−1 atana7π
5bb f tan−1
atana−π3bb
g tan−1 atana4π
3bb
For what values of x is tan−1(tan(x)) = x? Confi rm your result using CAS.
c02Trigonometry.indd 57 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

Reciprocal trigonometric functionsHistory of trigonometryThe word trigonometry is derived from the Greek words trigonon and metron, meaning ‘triangle’ and ‘measure’. Trigonometry is the branch of mathematics that deals with triangles and the relationships between the angles and sides of a triangle. Trigonometry was originally devised in the third century BC to meet the needs of the astronomers of those times. Hipparchus was a Greek astronomer and mathematician and is considered to be the founder of trigonometry, as he compiled the first trigonometric tables in about 150 BC.
Definitions of trigonometric ratiosThe following is a review of trigonometry, which is needed for the rest of this topic and subsequent work in this book.
The trigonometric functions sin(x), cos(x) and tan(x) are defined in terms of the ratio of the lengths of the sides of a right-angled triangle. Let the lengths of the three sides of the triangle be a, b and c, and let the angle between sides a and c be θ.
sin(θ) =opposite
hypotenuse= b
c
cos(θ) =adjacent
hypotenuse= a
c
tan(θ) =opposite
adjacent= b
a
Pythagoras’ theorem states that in any right-angled triangle, the square of the hypotenuse is equal to the sum of the squares of the other two sides. That is:
a2 + b2 = c2.
The unit circleAn alternative definition of the trigonometric functions is based on the unit circle, which is a circle with radius one unit and centre at the origin. The unit circle has the equation x2 + y2 = 1. The coordinate of any point P (x, y) on the unit circle is defined in terms of the trigonometric functions OR = x = cos(θ) and RP = y = sin(θ), where θ is the angle measured as a positive angle, anticlockwise from positive direction of the x-axis. The trigonometric functions are also called circular functions as they are based on the unit circle.
AOS 1
Topic 2
Concept 1
Reciprocal circular functionsConcept summaryPractice questions
aθ
bc
y
O
P
T
SR
1
xx
y
(−1, 0) (1, 0)
tan (θ)
(0, 1)
(0, −1)
θ = πθ = 0
θ
θ = π—2
θ = 3π—2
2.2
58 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 58 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

By substituting x = cos(θ) and y = sin(θ) into the equation x2 + y2 = 1, we can derive the relationship sin2(θ) + cos2(θ) = 1.
Note that sin2(θ) = (sin(θ))2 and cos2(θ) = (cos(θ))2.
The vertical distance from S to T is defined as tan(θ). As the triangles ΔORP and ΔOST are similar,
RPOR
= STOS
=tan(θ)
1
yx
=sin(θ )
cos(θ )= tan(θ)
angles of any magnitudeIn the diagram of the unit circle, consider the point (0, 1) on the y-axis. This
point corresponds to the angle θ = 90° or π2
radians rotated from the positive
end of the x-axis. Since the sine of the angle is the y-coordinate, it follows that
sin(90°) = sin aπ2b = 1. Since the cosine of the angle is the x-coordinate, it follows
that cos (90°) = cos aπ2b = 0. The tangent is the value of sine divided by the cosine;
because we cannot divide by zero, the tan of θ = 90° or π2
radians is undefined.
Similarly for the point (–1, 0), where θ = 180° or π radians, it follows that cos(180°) = cos(π) = −1 and sin(180°) = sin(π) = 0.
The diagram can be used to obtain the trigonometric value of any multiple of 90°, and these results are summarised in the following table.
Angle (degrees) 0° 90° 180° 270° 360°
Angle (radians) 0π2 π 3π
22π
sin (θ) 0 1 0 −1 0
cos (θ) 1 0 −1 0 1
tan (θ) 0 Undefined 0 Undefined 0
Note: Whenever an angle measurement is shown without a degree symbol in this topic, assume that it is measured in radians.
The first quadrantThe angle in the first quadrant is 0° < θ < 90° in degrees or 0 < θ < π
2 in radians.
In the first quadrant, x > 0 and y > 0, so cos(θ) > 0 and sin(θ) > 0; therefore, tan(θ) > 0. The following table shows values derived from triangles in the first quadrant using the trigonometric ratios. You should memorise these values, as they are used extensively in this topic.
Topic 2 TrIgonoMeTry 59
c02Trigonometry.indd 59 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

Angle (degrees) 0° 30° 45° 60° 90°
Angle (radians) 0π6
π4
π3
π2
sin (θ) 012
!22
!32
1
cos (θ) 1 !32
!22
12
0
tan (θ) 0 !33
1 !3 Undefined
Note that sin(30° + 60°) ≠ sin(90°) and in general
sin(A + B) ≠ sin(A) + sin(B), cos(A + B) ≠ cos(A) + cos(B) and tan(A + B) ≠ tan(A) + tan(B).
The formulas for sin(A + B) are called compound angle formulas. They are studied in greater depth in Section 2.4.
The second quadrant
The angle in the second quadrant is 90° < θ < 180°
in degrees or π2
< θ < π in radians. In the second
quadrant, x < 0 and y > 0, so cos(θ) < 0 and sin(θ) > 0; therefore, tan(θ) < 0.
Consider the point P (a, b) in the first quadrant. When this point is reflected in the y-axis, it becomes the point P′(–a, b). If P makes an angle of θ with the x-axis, then P′ makes an angle of 180 − θ degrees or π − θ radians with the x-axis. From the definitions of sine and cosine, we obtain the following relationships.
sin(180° − θ) = sin(θ) sin(π − θ) = sin(θ)
cos(180° − θ) = −cos(θ) cos(π − θ) = −cos(θ)
tan(180° − θ) = −tan(θ) tan(π − θ) = −tan(θ)For example:
sin a5π6b = sin aπ − π
6b = sin aπ
6b = 1
2
cos a3π4b = cos aπ − π
4b = −cos aπ
4b = −!2
2
tan a2π3b = tan aπ − π
3b = −tan aπ
3b = −!3
The third quadrant
The angle in the third quadrant is 180° < θ < 270° in degrees or π < θ < 3π2
in
radians. In the third quadrant, x < 0 and y < 0, so cos(θ) < 0 and sin(θ) < 0. However, tan(θ) > 0.
O
T
Tʹ
x
y
Pʹ (−a, b)
P (a, b)
−a
b
a
b
tan (π − θ)
π − θ
θ
O
T
x
y
Pʹ (−a, −b)
P (a, b)
−a−b
a
b
tan (π + θ)π + θ
θ
60 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 60 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

Consider the point P (a, b) in the first quadrant. When this point is reflected in both the x- and y-axes, it becomes the point P′ (–a, –b). If P makes an angle of θ with the x-axis, then P′ makes an angle of 180 + θ degrees or π + θ radians with the positive end of the x-axis. From the definitions of sine and cosine, we obtain the following relationships.
sin(180° + θ) = −sin(θ) sin(π + θ) = −sin(θ)
cos(180° + θ) = −cos(θ) cos(π + θ) = −cos(θ)
tan(180° + θ) = tan(θ) tan(π + θ) = tan(θ)
For example:
sin a7π6b = sin aπ + π
6b = −sin aπ
6b = −1
2
cos a5π4b = cos aπ + π
4b = −cos aπ
4b = −!2
2
tan a4π3b = tan aπ + π
3b = tan aπ
3b = !3
The fourth quadrantThe angle in the fourth quadrant is
270° < θ < 360° in degrees or 3π2
< θ < 2π in
radians. In the fourth quadrant, x > 0 and y < 0, so cos(θ) > 0 and sin(θ) < 0; therefore, tan(θ) < 0.
Consider the point P (a, b) in the first quadrant. When this point is reflected in the x-axis, it becomes the point P′ (a, –b). If P makes an angle of θ with the x-axis, then P′ makes an angle of 360 − θ degrees or 2π − θ radians with the x-axis. From the definitions of sine and cosine, we obtain the following relationships.
sin(360° − θ) = −sin(θ) sin(2π − θ) = −sin(θ)
cos(360° − θ) = cos(θ) cos(2π − θ) = cos(θ)
tan(360° − θ) = −tan(θ) tan(2π − θ) = −tan(θ)
For example:
sin a7π4b = sin a2π − π
4b = −sin aπ
4b = −!2
2
cos a5π3b = cos a2π − π
3b = cos aπ
3b = 1
2
tan a11π6
b = tan a2π − π6b = −tan aπ
6b = −!3
3
O
T
Tʹ
x
y
Pʹ (a, −b)
P (a, b)
−ba
b
−tan (θ)2π − θ
θ
Angle (degrees) 0° 30° 45° 60° 90°
Angle (radians) 0π6
π4
π3
π2
sin (θ) 012
!22
!32
1
cos (θ) 1 !32
!22
12
0
tan (θ) 0 !33
1 !3 Undefined
Note that sin(30° + 60°) ≠ sin(90°) and in general
sin(A + B) ≠ sin(A) + sin(B), cos(A + B) ≠ cos(A) + cos(B) and tan(A + B) ≠ tan(A) + tan(B).
The formulas for sin(A + B) are called compound angle formulas. They are studied in greater depth in Section 2.4.
The second quadrant
The angle in the second quadrant is 90° < θ < 180°
in degrees or π2
< θ < π in radians. In the second
quadrant, x < 0 and y > 0, so cos(θ) < 0 and sin(θ) > 0; therefore, tan(θ) < 0.
Consider the point P (a, b) in the first quadrant. When this point is reflected in the y-axis, it becomes the point P′(–a, b). If P makes an angle of θ with the x-axis, then P′ makes an angle of 180 − θ degrees or π − θ radians with the x-axis. From the definitions of sine and cosine, we obtain the following relationships.
sin(180° − θ) = sin(θ) sin(π − θ) = sin(θ)
cos(180° − θ) = −cos(θ) cos(π − θ) = −cos(θ)
tan(180° − θ) = −tan(θ) tan(π − θ) = −tan(θ)For example:
sin a5π6b = sin aπ − π
6b = sin aπ
6b = 1
2
cos a3π4b = cos aπ − π
4b = −cos aπ
4b = −!2
2
tan a2π3b = tan aπ − π
3b = −tan aπ
3b = −!3
The third quadrant
The angle in the third quadrant is 180° < θ < 270° in degrees or π < θ < 3π2
in
radians. In the third quadrant, x < 0 and y < 0, so cos(θ) < 0 and sin(θ) < 0. However, tan(θ) > 0.
O
T
Tʹ
x
y
Pʹ (−a, b)
P (a, b)
−a
b
a
b
tan (π − θ)
π − θ
θ
O
T
x
y
Pʹ (−a, −b)
P (a, b)
−a−b
a
b
tan (π + θ)π + θ
θ
Topic 2 TrIgonoMeTry 61
c02Trigonometry.indd 61 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

summaryThe trigonometric ratios sin(θ), cos(θ) and tan(θ) are all positive in the first quadrant. Only sin(θ) is positive in the second quadrant; only tan(θ) is positive in the third quadrant; and finally, only cos(θ) is positive in the fourth quadrant. This is summarised in the diagram at right. The mnemonic CAST is often used as a memory aid.
sin(θ) = sin(π − θ) = −sin(π + θ) = −sin(2π − θ)
cos(θ) = −cos(π − θ) = −cos(π + θ) = cos(2π − θ)
tan(θ) = −tan(π − θ) = tan(π + θ) = −tan(2π − θ)
negative anglesA negative angle is one that is measured clockwise from the positive direction of the x-axis.
Consider the point P (a, b) in the first quadrant. When this point is reflected in the x-axis, it becomes the point P′ (a, –b). If P makes an angle of θ with the x-axis, then P′ makes an angle of –θ with the x-axis. From the definitions of sine and cosine, we obtain the following relationships.
sin(−θ) = −sin(θ)
cos(−θ) = cos(θ)
tan(−θ) = −tan(θ)
A negative angle −π2
< θ < 0 is just the equivalent angle in the fourth quadrant.
For positive angles greater than 360° or 2π, we can just subtract multiples of 360° or 2π.
sin(360° + θ) = sin(θ) sin(2π + θ) = sin(θ)
cos(360° + θ) = cos(θ) cos(2π + θ) = cos(θ)
tan(360° + θ) = tan(θ) tan(2π + θ) = tan(θ)
For example:
sin a−4π3b = −sin a4π
3b = −sin aπ + π
3b = sin aπ
3b = !3
2
cos a−7π4b = cos a7π
4b = cos a2π − π
4b = cos aπ
4b = !2
2
tan a−2π3b = −tan a2π
3b = −tan aπ − π
3b = tan aπ
3b = !3
reciprocal trigonometric functionsThe reciprocal of the sine function is called the cosecant function, often abbreviated
to cosec. It is defined as cosec(x) = 1sin(x)
, provided that sin(x) ≠ 0.
T C
S A
x
y
2π − θπ + θ
π − θ
θ = 0θ = π
θθ = π–
2
θ = 3π––2
O
T
Tʹ
x
y
Pʹ (a, −b)
P (a, b)
−ba
b
−tan (θ)
θ−θ
62 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 62 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

The reciprocal of the cosine function is called the secant function, often abbreviated
to sec. It is defi ned as sec(x) = 1cos(x)
, provided that cos(x) ≠ 0.
The reciprocal of the tangent function is called the cotangent function, often
abbreviated to cot. It is defi ned as cot(x) = 1tan(x)
=cos(x)
sin(x), provided that sin(x) ≠ 0.
Note that these are not the inverse trigonometric functions. (The inverse trigonometric functions are covered in Section 2.6.)
The reciprocal trigonometric functions can also be defi ned in terms of the sides of a right-angled triangle.
cosec (θ) =hypotenuse
opposite= c
b
sec (θ) =hypotenuse
adjacent= c
a
cot (θ) =adjacent
opposite= a
b
exact valuesThe exact values for the reciprocal trigonometric functions for angles that are multiples of 30° and 45° can be found from the corresponding trigonometric values by fi nding the reciprocals. Often it is necessary to simplify the resulting expression or rationalise the denominator.
aθ
bc
Find the exact value of cosec a5π4b .
tHinK WritE
1 State the required identity. cosec (θ) = 1sin (θ)
cosec a5π4b = 1
sin a5π4b
2 Use the known results. Use sin (π + θ) = −sin (θ) with θ = π4
.
cosec a5π4b = 1
sin aπ + π4b
= 1
−sin aπ4b
3 Simplify the ratio and state the fi nal answer.
cosec a5π4b = 1
− 1!2
= −!2
WorKeD eXaMPLe 111
Topic 2 TrIgonoMeTry 63
c02Trigonometry.indd 63 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

using triangles to fi nd valuesTriangles can be used to fi nd the values of the required trigonometric ratios. Particular attention should be paid to the sign of the ratio.
If cosec (θ) = 74
and π2
< θ < π, find the exact value of cot(θ).
tHinK WritE/draW
1 State the values of the sides of a corresponding right-angled triangle.
cosec (θ) = 74
1sin(θ)
= 74
sin(θ) = 47
The hypotenuse has a length of 7 and the opposite side length is 4.
2 Draw the triangle and label the side lengths using the defi nition of the trigonometric ratio. Label the unknown side length as x. 4
7
xθ
3 Calculate the value of the third side using Pythagoras’ theorem.
x2 + 42 = 72
x2 + 16 = 49 x2 = 49 − 16 x2 = 33 x = !33
4 State the value of a related trigonometric ratio.
Given that π2
< θ < π, θ is in the second quadrant.
Although sin(θ) is positive in this quadrant, tan(θ) is negative.
tan(θ) = − 4!33
5 Calculate the value of the required trigonometric value.
cot (θ) = 1tan (θ)
= 1
− 4!33
= −!334
33
47
θ
WorKeD eXaMPLe 222
64 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 64 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

Reciprocal trigonometric functions
1 WE1 Find the exact value of cosec a2π3b.
2 Find the exact value of sec a−7π6b.
3 WE2 If cosec (θ) = 52
and π2
< θ < π, find the exact value of cot (θ).
4 If cot (θ) = 4 and π < θ < 3π2
, find the exact value of sec (θ).
5 Find the exact values of each of the following.
a sec aπ6b b sec a3π
4b c sec a4π
3b d sec a−7π
4b
6 Find the exact values of each of the following.
a cosec aπ3b b cosec a5π
6b c cosec a7π
4b d cosec a5π
3b
7 Find the exact values of each of the following.
a cot aπ6b b cot a2π
3b c cot a7π
4b d cot a11π
6b
8 a If sin(x) = 13
and π2
< x < π, find the exact value of sec(x).
b If cosec(x) = 4 and π2
< x < π, find the exact value of cot(x).
9 a If cos(x) = −37
and π < x < 3π2
, find the exact value of cot(x).
b If sec(x) = −52
and π < x < 3π2
, find the exact value of cosec(x).
10 a If cos(x) = 37
and 3π2
< x < 2π, find the exact value of cosec(x).
b If sec(x) = 85
and 3π2
< x < 2π, find the exact value of cot(x).
11 a If cosec(x) = 4 and π2
< x < π, find the exact value of tan(x).
b If cot(x) = −56
and π2
< x < π, find the exact value of cosec(x).
12 a If sec(x) = −7 and π < x < 3π2
, find the exact value of cot(x).
b If cot(x) = 4 and π < x < 3π2
, find the exact value of cosec(x).
13 a If sec(x) = 6 and 3π2
< x < 2π, find the exact value of cosec(x).
b If cot(x) = −52
and 3π2
< x < 2π, find the exact value of sec (x).
ExErcisE 2.2
PractisE
consolidatE
Topic 2 TrIgonoMeTry 65
c02Trigonometry.indd 65 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

14 a If cot(x) = −!63
and π2
< x < π, fi nd the exact value of cosec(x).
b If sec(x) = 2!63
and 3π2
< x < 2π, fi nd the exact value of cot(x).
15 If cosec(x) =pq
where p, q ∈ R+ and π2
< x < π, evaluate sec(x) − cot(x).
16 If sec(x) = ab
where a, b ∈ R+ and 3π2
< x < 2π, evaluate cot(x) − cosec(x).
Trigonometric identities using reciprocal trigonometric functionsIdentitiesBy mathematical convention, (sin(θ))2 is written as sin2(θ), and similarly (cos(θ))2 is written as cos2(θ).
Note that sin2(θ) + cos2(θ) = 1 is an identity, not an equation, since it holds true for all values of θ.
Similarly, tan(θ) =sin(θ)
cos(θ) holds for all values of θ for which tan(θ) is defi ned, that is
for all values where cos(θ) ≠ 0, or θ ≠ (2n + 1)π2
where n ∈ Z or odd multiples of π2
.
Proving trigonometric identitiesA trigonometric identity is verifi ed by transforming one side into the other. Success in verifying trigonometric identities relies upon familiarity with known trigonometric identities and using algebraic processes such as simplifying, factorising, cancelling common factors, adding fractions and forming common denominators. The following identities must be known.
tan(θ) = sin(θ)cos(θ)
sec(θ) = 1cos(θ)
cosec(θ) = 1sin(θ)
cot(θ) = 1tan(θ)
MastEr
2.3AOS 1
Topic 2
Concept 3
Trigonometric identitiesConcept summaryPractice questions
Prove the identity tan (θ) + cot (θ) = sec (θ)cosec (θ).
tHinK WritE
1 Start with the left-hand side. LHS = tan(θ) + cot(θ)
2 Substitute for the appropriate trigonometric identities.
tan(θ) =sin(θ)
cos(θ) and cot(θ) =
cos(θ)
sin(θ)
LHS =sin(θ)
cos(θ)+
cos(θ)
sin(θ)
WorKeD eXaMPLe 333
66 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 66 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

Fundamental relationsIf all terms of sin2(θ) + cos2(θ) = 1 are divided by sin2(θ), we obtain
sin2(θ)
sin2(θ)+
cos2(θ)
sin2(θ)= 1
sin2(θ) and hence obtain the trigonometric identity
1 + cot2(θ) = cosec2(θ).
If all terms of sin2(θ) + cos2(θ) = 1 are divided by cos2(θ), we obtain
sin2(θ)
cos2(θ)+
cos2(θ)
cos2(θ)= 1
cos2(θ) and hence obtain the trigonometric identity
tan2(θ) + 1 = sec2(θ).
Prove the identity 1 + tan2(θ)
1 + cot2(θ)= tan2(θ).
tHinK WritE
1 Start with the left-hand side. LHS =1 + tan2(θ)
1 + cot2(θ)
2 Substitute the appropriate trigonometric identities.
Replace 1 + tan2(θ) = sec2(θ) in the numerator and 1 + cot2(θ) = cosec2(θ) in the denominator.
LHS =sec2(θ)
cosec2(θ)
3 Use appropriate trigonometric identities to express the quotient in terms of sines and cosines.
sec2(θ) = 1cos2(θ)
and cosec2(θ) = 1sin2(θ)
LHS =
1cos2(θ)
1sin2(θ)
WorKeD eXaMPLe 444
3 Add the fractions, forming the lowest common denominator.
LHS =sin2(θ) + cos2(θ)
cos(θ)sin(θ)
4 Simplify the numerator. Since sin2(θ) + cos2(θ) = 1,
LHS = 1cos(θ)sin(θ)
5 Write the expression as factors. LHS = 1cos(θ)
× 1sin(θ)
6 Substitute for the appropriate trigonometric identities. The proof is complete.
sec(θ) = 1cos(θ)
and cosec(θ) = 1sin(θ)
LHS = sec(θ)cosec(θ) = RHS
Topic 2 TrIgonoMeTry 67
c02Trigonometry.indd 67 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

4 Simplify the quotient. Use
1a
1b
= ba
.
LHS =sin2(θ)
cos2(θ)
5 Simplify and state the final result. Since tan2(θ) =sin2(θ)
cos2(θ),
LHS = tan2(θ)= RHS
Trigonometric identities using reciprocal trigonometric functions1 WE3 Prove the identity sec2(θ) + cosec2(θ) = sec2(θ)cosec2(θ).
2 Prove the identity sin(θ)
1 + cos(θ)+
1 + cos(θ)
sin(θ)= 2 cosec(θ).
3 WE4 Prove the identity 1 + cot2(θ)
1 + tan2(θ)= cot2(θ).
4 Prove the identity (1 − sin2(θ))(1 + tan2(θ)) = 1.
For questions 5–14, prove each of the given identities.
5 a cos(θ)cosec(θ) = cot(θ) b cos(θ)tan(θ) = sin(θ)
6 a sin(θ)sec(θ)cot(θ) = 1 b cos(θ)cosec(θ)tan(θ) = 1
7 a (cos(θ) + sin(θ))2 + (cos(θ) − sin(θ))2 = 2
b 2 − 3 cos2(θ) = 3 sin2(θ) − 1
8 a tan2(θ)cos2(θ) + cot2(θ)sin2(θ) = 1
b sin(θ)
cosec(θ)+
cos(θ)
sec(θ)= 1
9 a 11 − sin(θ)
+ 11 + sin(θ)
= 2 sec2(θ)
b 11 − cos(θ)
+ 11 + cos(θ)
= 2 cosec2(θ)
10 a 11 + sec2(θ)
+ 11 + cos2(θ)
= 1
b (1 − tan(θ))2 + (1 + tan(θ))2 = 2 sec2(θ)
11 a (tan(θ) + sec(θ))2 =1 + sin(θ)
1 − sin(θ)
b sec4(θ) − sec2(θ) = tan4(θ) + tan2(θ)
12 a tan(θ)
sec(θ) − 1+
tan(θ)
sec(θ) + 1= 2 cosec(θ)
b 1 + cot(θ)
cosec(θ)−
sec(θ)
tan(θ) + cot(θ)= cos(θ)
ExErcisE 2.3
PractisE
consolidatE
Compound-angle formulasThe compound-angle formulas are also known as trigonometric addition and subtraction formulas.
Proof of the compound-angle formulasThe compound addition formulas state that:
sin(A + B) = sin(A)cos(B) + cos(A)sin(B)
cos(A + B) = cos(A)cos(B) − sin(A)sin(B)
tan(A + B) =tan(A) + tan(B)
1 − tan(A)tan(B)
It is interesting to consider one method of proving these identities.
Consider the triangle OQR with a right angle at Q, as shown in the diagram. The line segment TR is constructed so that TR is perpendicular to OR, and the line segment TP is constructed so that it is perpendicular to OP and SR. Let ∠ROQ = A and ∠TOR = B so that ∠TOP = A + B.
Using the properties of similar triangles in ΔTSR and ΔOQR, or the property that supplementary angles sum to 90°, it follows that ∠STR = A.
In triangle OQR, sin(A) =QR
OR and cos(A) =
OQ
OR.
In triangle RST, sin(A) = SRRT
and cos(A) = STRT
.
In triangle ORT, sin(B) = RTOT
and cos(B) = OROT
.
Now consider the triangle OPT.
sin(A + B) = PTOT
= PS + STOT
= PSOT
+ STOT
2.4AOS 1
Topic 2
Concept 4
Compound and double angle formulasConcept summaryPractice questions
R
T
PO Q
S
AB
68 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 68 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

13 a cos(θ)
1 − sin(θ)= sec(θ) + tan(θ) b
cos(θ)
1 + sin(θ)= sec(θ) − tan(θ)
14 a 11 + sin2(θ)
+ 11 + cosec2(θ)
= 1 b 11 + cot2(θ)
+ 11 + tan2(θ)
= 1
For questions 15 and 16, prove each of the given identities.
15 a a − b cos2(θ)
sin2(θ)= b + (a − b)cosec2(θ) b
a − b sin2(θ)
cos2(θ)= b + (a − b)sec2(θ)
16 a a − b tan2(θ)
1 + tan2(θ)= (a + b)cos2(θ) − b b
a − b cot2(θ)
1 + cot2(θ)= (a + b)sin2(θ) − b
Compound-angle formulasThe compound-angle formulas are also known as trigonometric addition and subtraction formulas.
Proof of the compound-angle formulasThe compound addition formulas state that:
sin(A + B) = sin(A)cos(B) + cos(A)sin(B)
cos(A + B) = cos(A)cos(B) − sin(A)sin(B)
tan(A + B) =tan(A) + tan(B)
1 − tan(A)tan(B)
It is interesting to consider one method of proving these identities.
Consider the triangle OQR with a right angle at Q, as shown in the diagram. The line segment TR is constructed so that TR is perpendicular to OR, and the line segment TP is constructed so that it is perpendicular to OP and SR. Let ∠ROQ = A and ∠TOR = B so that ∠TOP = A + B.
Using the properties of similar triangles in ΔTSR and ΔOQR, or the property that supplementary angles sum to 90°, it follows that ∠STR = A.
In triangle OQR, sin(A) =QR
OR and cos(A) =
OQ
OR.
In triangle RST, sin(A) = SRRT
and cos(A) = STRT
.
In triangle ORT, sin(B) = RTOT
and cos(B) = OROT
.
Now consider the triangle OPT.
sin(A + B) = PTOT
= PS + STOT
= PSOT
+ STOT
MastEr
2.4AOS 1
Topic 2
Concept 4
Compound and double angle formulasConcept summaryPractice questions
R
T
PO Q
S
AB
Topic 2 TrIgonoMeTry 69
c02Trigonometry.indd 69 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

PS = QR, so
sin(A + B) =QROT
+ STOT
=QROT
× OROR
+ STOT
× RTRT
=QROR
× OROT
+ STRT
× RTOT
That is,
sin(A + B) = sin(A)cos(B) + cos(A)sin(B)
Also in the triangle OPT:
cos(A + B) = OPOT
=OQ − PQ
OT=
OQ
OT−
PQ
OT
PQ = SR, so
cos(A + B) =OQOT
− SROT
=OQOT
× OROR
− SROT
× RTRT
=OQOR
× OROT
− SRRT
× RTOT
cos(A + B) = cos(A)cos(B) − sin(A)sin(B)
Proof of the compound-angle subtraction formulasThe compound subtraction formulas state that:
sin(A − B) = sin(A)cos(B) − cos(A)sin(B)
cos(A − B) = cos(A)cos(B) + sin(A)sin(B)
These formulas can obtained by replacing B with –B and using cos(−B) = cos(B) and sin(−B) = −sin(B).
Substituting into the formula sin(A + B) = sin(A)cos(B) + cos(A)sin(B), we derive sin(A + (−B)) = sin(A)cos(−B) + cos(A)sin(−B), so that sin(A − B) = sin(A)cos(B) − cos(A)sin(B).
Similarly, in the formula cos(A + B) = cos(A)cos(B) − sin(A)sin(B), we derive cos(A + (−B)) = cos(A)cos(−B) − sin(A)sin(−B), so that cos(A − B) = cos(A)cos(B) + sin(A)sin(B).
Proof of the compound-angle formulas involving tangentsLet us substitute the formulas for sin(A + B) and cos(A + B) into the identity for the tangent ratio.
tan(A + B) =sin(A + B)
cos(A + B)
=sin(A)cos(B) + cos(A)sin(B)
cos(A)cos(B) − sin(A)sin(B)
70 Maths Quest 12 sPeCIaLIst MatheMatICs VCe units 3 and 4
c02Trigonometry.indd 70 20/08/15 11:39 AM
UNCORRECTED PAGE P
ROOFS

In order to simplify this fraction, divide each term by cos(A)cos(B):
tan(A + B) =
sin(A)cos(B)
cos(A)cos(B)+
cos(A)sin(B)
cos(A)cos(B)
cos(A)cos(B)
cos(A)cos(B)−
sin(A)sin(B)
cos(A)cos(B)
=
sin(A)
cos(A)+
sin(B)
cos(B)
1 −sin(A)
cos(A)×
sin(B)
cos(B)
=tan(A) + tan(B)
1 − tan(A)tan(B)
The corresponding formula for the tangent for the difference of two angles is obtained by replacing B with –B and using tan(−B) = −tan(B).
tan(A + (−B)) =tan(A) + tan(−B)
1 − tan(A)tan(−B)
tan(A − B) =tan(A) − tan(B)
1 + tan(A)tan(B)
Summary of the compound-angle formulasThese results are called the compound-angle formulas or addition theorems. They can be summarised as:
sin(A + B) = sin(A)cos(B) + cos(A)sin(B)
sin(A − B) = sin(A)cos(B) − cos(A)sin(B)
cos(A + B) = cos(A)cos(B) − sin(A)sin(B)
cos(A − B) = cos(A)cos(B) + sin(A)sin(B)
tan(A + B) =tan(A) + tan(B)
1 − tan(A)tan(B)
tan(A − B) =tan(A) − tan(B)
1 + tan(A)tan(B)
Using compound-angle formulas in problemsThe compound-angle formulas can be used to simplify many trigonometric expressions. They can be used in both directions, for example sin(A)cos(B) + cos(A)sin(B) = sin(A + B).
Evaluate sin (22°)cos (38°) + cos (22°)sin (38°).
THINK WRITE
1 State an appropriate identity. sin(A)cos(B) + cos(A)sin(B) = sin(A + B)Let A = 22° and B = 38°.sin(22°)cos(38°) + cos(22°)sin(38°) = sin(22° + 38°)
WORKED EXAMPLE 555
Topic 2 TRIGONOMETRY 71
c02Trigonometry.indd 71 20/08/15 10:49 AM
UNCORRECTED PAGE P
ROOFS

expanding trigonometric expressions with phase shiftsThe compound-angle formulas can be used to expand trigonometric expressions.
Expand 2 cos aθ + π3b .
tHinK WritE
1 State an appropriate identity. cos(A + B) = cos(A)cos(B) − sin(A)sin(B)
Let A = θ and B = π3
.
2 cos aθ + π3b = 2acos(θ)cos aπ
3b − sin(θ)sin aπ
3bb
2 Substitute for exact values. Since cos aπ3b = 1
2 and sin aπ
3b = !3
2,
2 cos aθ + π3b = 2acos(θ) × 1
2− sin(θ) × !3
2b
3 Simplify. = cos(θ) − !3 sin(θ)
4 State the answer. 2 cos aθ + π3b = cos(θ) − !3 sin(θ)
WorKeD eXaMPLe 666
simplifi cation of sin an π2
± θb and cos an π2
± θb for n ∈ Z
Recall that cos aπ2
− θb = sin(θ) and sin aπ2
− θb = cos(θ) as complementary angles.
Compound-angle formulas can be used to simplify and verify many of these results and similar formulas from earlier results, that is trigonometric expansions of the forms
sin anπ2
± θb and cos anπ2
± θb where n ∈ Z.
Use compound-angle formulas to simplify cos a3π2
− θb .
tHinK WritE
1 State an appropriate identity. cos(A − B) = cos(A)cos(B) + sin(A)sin(B)
Let A = 3π2
and B = θ.
cos a3π2
− θb = cos a3π2bcos (θ) + sin a3π
2bsin (θ)
WorKeD eXaMPLe 777
2 Simplify and use the exact values. sin (22°)cos (38°) + cos (22°)sin (38°) = sin (60°)
= !32
72 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 72 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

exact values for multiples of π12
Exact values are known for the trigonometric ratios for all multiples of π6
radians or
30°, and for all multiples π4
radians or 45°. Using the compound-angle formulas the
exact value can be found for a trigonometric ratio of an angle that is an odd multiple
of π12
radians or 15°. This can be obtained by rewriting the multiple of π12
radians or
15° as a sum or difference of known fractions in terms of multiples of π6
radians or
30° and π4
radians or 45°.
2 Simplify and use exact values. Since cos a3π2b = 0 and sin a3π
2b = −1,
cos a3π2
− θ b = 0 × cos (θ) + −1 × sin (θ)
3 State the fi nal answer. cos a3π2
− θ b = −sin (θ)
Find the exact value of sin a13π12
b .
tHinK WritE
1 Rewrite the argument as a sum or difference of fractions.
5π6
+ π4
= 13π12
, or in degrees, 150° + 45° = 195°.
sin a13π12
b = sin a5π6
+ π4b
2 State an appropriate identity. sin(A + B) = sin(A)cos(B) + cos(A)sin(B)
Let A = 5π6
and B = π4
.
sin a13π12
b = sin a5π6bcos aπ
4b + cos a5π
6bsin aπ
4b
3 Simplify and use exact values. Substitute sin a5π6b = 1
2, cos aπ
4b = !2
2,
cos a5π6b = −!3
2 and sin aπ
4b = !2
2.
sin a13π12
b = 12
× !22
+ −!32
× !22
= !24
− !64
4 Simplify and state the fi nal answer. sin a13π12
b = 14
(!2 − !6 )
WorKeD eXaMPLe 888
Topic 2 TrIgonoMeTry 73
c02Trigonometry.indd 73 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

using triangles to fi nd valuesBy drawing triangles to fi nd the values of trigonometric ratios of a single angle and then using the compound-angle formulas, the trigonometric values of the addition or subtraction of two angles may be found.
If cos(A(A( ) = 1213
and sin(B) = 725
, where 0 < A < π2
and π2
< B < π, find the
exact value of sin(A(A( − B).
tHinK WritE/draW
1 State the values of the sides of the required right-angled triangle.
cos(A) = 1213
=adjacent
hypotenuseThe adjacent side length is 12 and the hypotenuse is 13.
2 Use Pythagoras’ theorem to calculate the third side length.
"132 − 122 = !169 − 144= !25= 5
3 State the third side length of the triangle. Draw the triangle.
The other side length is 5. We know that 5, 12, 13 is a Pythagorean triad.
4 State the value of the unknown trigonometric ratio.
Given that 0 < A < π2
, so A is in the fi rst quadrant,
sin (A) = 513
.
5 State the values of the sides of another required right-angled triangle.
sin (B) = 725
=opposite
hypotenuse
The opposite side length is 7 and the hypotenuse is 25.
6 Use Pythagoras’ theorem to calculate the third side length.
"252 − 72 = !625 − 49= !576= 24
7 State the third side length of the triangle. Draw the triangle.
The other side length is 24. We know that 7, 24, 25 is a Pythagorean triad.
8 Calculate the value of the unknown trigonometric ratio.
Since π2
< B < π, B is in the second quadrant, B is
an obtuse angle and cosine is negative in the second quadrant.
Therefore, cos(B) = −2425
12A
513
725
B24
WorKeD eXaMPLe 999
74 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 74 20/08/15 10:41 AM
UNCORRECTED PAGE P
ROOFS

Compound-angle formulas1 WE5 Evaluate sin(51°)cos(9°) + cos(51°)sin(9°).
2 Find the value of cos(37°)cos(23°) − sin(37°)sin(23°).
3 WE6 Expand 4 cos a θ + π6b.
4 Express !2 sin a θ + π4b as a combination of sines and cosines.
5 WE7 Use compound-angle formulas to simplify cos(π − θ ).
6 Simplify sin(2π − θ ).
7 WE8 Find the exact value of sin a7π12
b.
8 Find the exact value of tan a11π12
b.
9 WE9 If cos(A) = 35
and sin(B) = 817
where 0 < A < π2
and π2
< B < π, find the
exact value of sin(A − B).
10 Given that tan(A) = 940
and cos(B) = 725
where π < A < 3π2
and 0 < B < π2
, find
the exact value of cos(A + B).
11 Evaluate each of the following.
a sin(27°)cos(33°) + cos(27°)sin(33°)b cos(47°)cos(43°) − sin(47°)sin(43°)c cos(76°)cos(16°) + sin(76°)sin(16°)d cos(63°)sin(18°) − sin(63°)cos(18°)
12 Evaluate each of the following.
a tan(52°) − tan(22°)
1 + tan(52°)tan(22°)b
tan(32°) + tan(28°)
1 − tan(32°)tan(28°)
13 Expand each of the following.
a !2 sin a θ − π4b b 2 sin a θ + π
3b
c 2 cos a θ − π6b d !2 cos a θ + π
4b
ExErcisE 2.4
PractisE
consolidatE
9 State and use an appropriate identity. sin(A − B) = sin(A)cos(B) − cos(A)sin(B)
10 Substitute for the values and simplify. sin(A − B) = 513
× −2425
− 1213
× 725
11 Simplify and state the final answer. sin(A − B) = −204325
Topic 2 TrIgonoMeTry 75
c02Trigonometry.indd 75 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

14 Use compound-angle formulas to simplify each of the following.
a sin aπ2
− θ b b cos aπ2
− θ b c sin(π + θ) d cos(π − θ)
15 Use compound-angle formulas to simplify each of the following.
a sin a3π2
− θ b b cos a3π2
+ θ b c tan(π − θ) d tan(π + θ)
16 Simplify each of the following.
a sin ax + π3b − sin ax − π
3b b tan ax + π
4b tan ax − π
4b
c cos aπ3
+ xb − cos aπ3
− xb d cos aπ6
− xb − cos aπ6
+ xb
17 Find each of the following in exact simplest surd form.
a cos a7π12
b b tan a π12
b c sin a11π12
b d tan a5π12
b
18 Given that cos(A) = 45, sin(B) = 12
13, and A and B are both acute angles, find the
exact value of:
a cos(A − B) b tan(A + B).
19 Given that sin(A) = 513
and tan(B) = 247
where A is obtuse and B is acute, find the exact value of:
a sin(A + B) b cos (A + B).
20 Given that sec(A) = 72, cosec(B) = 3
2, and A is acute but B is obtuse, find the
exact value of:
a cos(A + B) b sin(A − B).
21 Given that cosec(A) = 1a
, sec(B) = 1b
, A and B are both acute, and 0 < a < 1 and
0 < b < 1, evaluate tan(A + B).
22 Given that sin(A) = aa + 1
and cos(B) = aa + 2
where A and B are both acute,
evaluate tan(A + B).
MastEr
Double-angle formulasIn this section we consider the special cases of the addition formulas when B = A.
Double-angle formulasIn the formula sin(A + B) = sin(A)cos(B) + cos(A)sin(B), let B = A.
sin(2A) = sin(A)cos(A) + sin(A)cos(A)
sin(2A) = 2 sin(A)cos(A)
In the formula cos(A + B) = cos(A)cos(B) − sin(A)sin(B), let B = A.
cos(2A) = cos(A)cos(A) − sin(A)sin(A)
cos(2A) = cos2(A) − sin2(A)
2.5
76 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 76 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

Since sin2(A) + cos2(A) = 1, it follows that cos2(A) = 1 − sin2(A). This formula can be rewritten in terms of sin(A) only.
cos(2A) = (1 − sin2(A)) − sin2(A)
cos(2A) = 1 − 2 sin2(A)
Alternatively, if we substitute sin2(A) = 1 − cos2(A), then this formula can also be rewritten in terms of cos(A) only.
cos(2A) = cos2(A) − (1 − cos2(A))
cos(2A) = 2 cos2(A) − 1
There are thus three equivalent forms of the double-angle formulas for cos(2A).
If we let B = A in the formula tan(A + B) = tan(A) + tan(B)
1 − tan(A)tan(B), we obtain
tan(2A) = tan(A) + tan(A)
1 − tan(A)tan(A)
tan(2A) = 2 tan(A)
1 − tan2(A)
All of these formulas can be summarised as follows:
sin(2A) = 2 sin(A)cos(A)
cos(2A) = cos2(A) − sin2(A)
cos(2A) = 1 − 2 sin2(A)
cos(2A) = 2 cos2(A) − 1
tan(2A) = 2 tan(A)
1 − tan2(A)
using double-angle formulas in simplifying expressionsThe double-angle formulas can be used to simplify many trigonometric expressions
and can be used both ways; for example, sin(A)cos(A) = 12 sin(2A).
Find the exact value of sin a7π12
bcos a7π12
b .
tHinK WritE
1 State an appropriate identity. sin(A)cos(A) = 12
sin(2A)
Let A = 7π12
.
sin a7π12
bcos a7π12
b = 12
sin a2 × 7π12
b
2 Simplify. Since 2 × 7π12
= 7π6
,
sin a7π12
bcos a7π12
b = 12
sin a7π6b
WorKeD eXaMPLe 101010
Topic 2 TrIgonoMeTry 77
c02Trigonometry.indd 77 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

If cos(A(A( ) = 14, determine the exact values of:
a sin (2A2A2 ) b cos (2A2A2 ) c tan (2A2A2 ).
THINK WRITE/DRAW
1 State the values of the sides of the required right-angled triangle.
cos(A) = 14
=adjacent
hypotenuse
The adjacent side length is 1 and the hypotenuse is 4.
2 Draw the triangle and label the side lengths using the de� nition of the trigonometric ratio. Label the unknown side length as x.
1
A
x4
3 Use Pythagoras’ theorem to calculate the third unknown side length.
12 + x2 = 42
x2 = 16 − 1 x = !15
4 Redraw the triangle.
1
A
4 15
5 Apply the de� nitions of the sine and tangent functions.
cos(A) = 14, sin(A) = !15
4 and tan(A) = !15
WORKED EXAMPLE 111111
Finding trigonometric expressions involving double-angle formulasWe can use the double-angle formulas to obtain exact values for trigonometric expressions.
3 Use the exact values to substitute into the expression.
Substitute sin a7π6b = −1
2:
12
sin a7π6b = 1
2× −1
2
4 State the answer. sin a7π12
bcos a7π12
b = −14
78 MATHS QUEST 12 SPECIALIST MATHEMATICS VCE Units 3 and 4
c02Trigonometry.indd 78 20/08/15 11:39 AM
UNCORRECTED PAGE P
ROOFS

a 1 Use the required identity. a sin(2A) = 2 sin(A)cos(A)
2 Substitute the known values and simplify.
= 2 × !154
× 14
= !158
b 1 Using the required identity, choose any one of the three choices for cos(2A).
b cos(2A) = cos2(A) − sin2(A)
2 Substitute the known values and simplify.
cos(2A) = a14b2
− a!154
b2
= 116
− 1516
= −78
c 1 State the required identity. c tan(2A) = sin(2A)
cos(2A)
2 Substitute the known values and simplify the ratio.
="15
8
−78
= −"157
3 As an alternative method, use the double-angle formulas for tan.
tan(2A) = 2 tan(A)
1 − tan2(A)
4 Substitute for the known value and simplify.
tan(A) = !15
tan(2A) = 2 tan(A)
1 − tan2(A)
= 2!151 − (!15)2
= 2!15−14
= −!157
solving trigonometric equations involving double-angle formulasTrigonometric equations are often solved over a given domain, usually x ∈ [0, 2π]. In this section we consider solving trigonometric equations that involve using the double-angle formulas.
Solve for x if sin(2x) + !3!3! cos(x) = 0 for x ∈ [0, 2π].
tHinK WritE
1 Expand and write the equation in terms of one argument only.
Use sin(2x) = 2 sin(x)cos(x)
sin(2x) + !3cos(x) = 0
2 sin(x)cos(x) + !3cos(x) = 0
WorKeD eXaMPLe 121212
Topic 2 TrIgonoMeTry 79
c02Trigonometry.indd 79 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

Trigonometric identities using double-angle formulasPreviously we used the fundamental trigonometric relationships to prove trigonometric identities using the reciprocal trigonometric functions. In this section we use the compound-angle formulas and the double-angle formulas to prove more trigonometric identities.
Prove the identity cos(2A2A2 )cos(A(A( ) + sin(2A2A2 )sin(A(A( )
sin(3A)cos(A(A( ) − cos(3A)sin(A(A( )= 1
2cosec(A(A( ).
tHinK WritE
1 Start with the left-hand side. LHS = cos(2A)cos(A) + sin(2A)sin(A)
sin(3A)cos(A) − cos(3A)sin(A)
2 Simplify the numerator and denominator by recognising these as expansions of appropriate compound-angle identities.
= cos(2A − A)
sin(3A − A)
3 Simplify. = cos(A)
sin(2A)
4 Expand the denominator using the double-angle formula.
= cos(A)
2 sin(A)cos(A)
5 Simplify by cancelling the common factor. The proof is complete.
= 12 sin(A)
Since 1sin(A)
= cosec(A),
LHS = 12 sin(A)
= 12
cosec(A)
= RHS as required.
WorKeD eXaMPLe 131313
2 Factorise by taking out the common factor. cos(x)(2 sin(x) + !3) = 0
3 Use the Null Factor Law. cos(x) = 0 or 2 sin(x) + !3 = 0
sin(x) = −!32
4 Solve the fi rst equation. cos(x) = 0
x = π2
, 3π2
5 Solve the second equation. sin(x) = −!32
x = 4π3
, 5π3
6 State all solutions of the original equation. x = π2
, 4π3
, 3π2
, 5π3
80 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 80 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

Half-angle formulasIf we replace A with A
2, the double-angle formulas can be written as the
half-angle formulas.
sin(A) = 2 sinaA2bcosaA
2b
cos(A) = cos2aA2b − sin2aA
2b
= 2 cos2aA2b − 1
= 1 − 2 sin2aA2b
These can also be rearranged and are often used as:
1 − cos(A) = 2 sin2aA2b
1 + cos(A) = 2 cos2aA2b
Prove the identity cosec(A(A( ) − cot(A(A( ) = tanaA2b .
tHinK WritE
1 Start with the left-hand side. LHS = cosec(A) − cot(A)
2 Use cosec(A) = 1sin(A)
and cot(A) = cos(A)
sin(A). = 1
sin(A)− cos(A)
sin(A)
3 Form the common denominator. = 1 − cos(A)
sin(A)
4 Use appropriate half-angle formulas. =2 sin2aA
2b
2 sinaA2bcosaA
2b
5 Simplify by cancelling the common factors. The proof is complete.
=sinaA
2b
cosaA2b
= tanaA2b
= RHS
WorKeD eXaMPLe 141414
Topic 2 TrIgonoMeTry 81
c02Trigonometry.indd 81 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

Multiple-angle formulasThere are many other trigonometric formulas for multiple angles. For example:
sin(3A) = 3 sin(A) − 4 sin3(A)
cos(3A) = 4 cos3(A) − 3 cos(A)
tan(3A) = 3 tan(A) − tan3(A)
1 − 3 tan2(A)
sin(4A) = cos(A)(4 sin(A) − 8 sin3(A))
cos(4A) = 8 cos4(A) − 8 cos2(A) + 1
tan(4A) = 4 tan(A)(1 − tan2(A))
1 − 6 tan2(A) + tan4(A)
Some of these proofs are provided in the next worked example; the remaining ones are left for the exercises.
Prove the identity cos(3A) = 4 cos3(A(A( ) − 3 cos(A(A( ).
tHinK WritE
1 Start with the left-hand side. LHS = cos(3A)
2 Expand the multiple argument. cos(2A + A) = cos(A)cos(2A) − sin(A)sin(2A)
3 Since we want the right-hand side in terms of cosines, substitute using appropriate trigonometric identities.
cos(2A) = 2 cos2(A) − 1sin(2A) = 2 sin(A)cos(A)cos(3A) = cos(A)(2 cos2(A) − 1) − sin(A)(2 sin(A)cos(A))
4 Expand the brackets. cos(3A) = 2 cos3(A) − cos(A) − 2 sin2(A)cos(A)
5 Rearrange the expression in terms of cosines.
Substitute sin2(A) = 1 − cos2(A):cos(3A) = 2 cos3(A) − cos(A) − 2(1 − cos2(A))cos(A)
6 Expand the brackets and simplify. The proof is complete.
cos(3A) = 2 cos3(A) − cos(A) − 2(cos(A) − cos3(A))= 4 cos3(A) − 3 cos(A)= RHS
WorKeD eXaMPLe 151515
Double-angle formulas and trigonometric identities
1 WE10 Find the exact value of sin a5π8bcos a5π
8b.
2 Find the exact value of 1 − 2 cos2(157°30′).
3 WE11 If cos(A) = 13, determine the exact values of:
a sin(2A) b cos(2A) c tan(2A).
4 Given that tan(A) = 47, determine the exact values of:
a sin(2A) b cos(2A) c tan(2A).
5 WE12 Solve for x if sin(2x) − !3 cos(x) = 0 for x ∈ [0, 2π].
ExErcisE 2.5
PractisE
82 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 82 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

6 Find the values of x ∈ [0, 2π] if sin(2x) + cos(x) = 0.
7 WE13 Prove the identity sin(3A)cos(A) − cos(3A)sin(A)
cos(2A)cos(A) + sin(2A)sin(A)= 2 sin(A).
8 Prove the identity tan aπ4
+ Ab + tan aπ4
− Ab = 2 sec(2A).
9 WE14 Prove the identity cosec(A) + cot(A) = cot aA2b.
10 Prove the identity Å1 − cos(A)
1 + cos(A) = tan aA
2b.
11 WE15 Prove the identity sin(3A) = 3 sin(A) − 4 sin3(A).
12 Prove the identity tan(3A) = 3 tan(A) − tan3(A)
1 − 3 tan2(A).
13 Evaluate each of the following expressions, giving your answers in exact form.
a sin aπ8bcos aπ
8b b cos2(112°30′) − sin2(112°30′)
c 2 sin2(22°30′) − 1 d
2 tan a π12
b
1 − tan2 a π
12b
14 Given that sec(A) = 83, find the exact values of:
a sin(2A) b cos(2A) c tan(2A).
15 Solve each of the following equations for x ∈ [0, 2π].
a sin(2x) = sin(x) b cos(x) = cos(2x)c sin(x) = cos(2x) d sin(2x) = cos(x)
16 Solve each of the following equations for x ∈ [0, 2π].
a tan(x) = sin(2x) b sin(2x) = !3 cos(x)c sin(4x) = sin(2x) d cos(2x) = sin(4x)
For questions 17–21, prove each of the given identities.
17 a sin(2A)cos(A) − cos(2A)sin(A)
cos(2A)cos(A) + sin(2A)sin(A)= tan(A)
b cos(2A)cos(A) + sin(2A)sin(A)
sin(2A)cos (A) − cos(2A)sin(A)= cot(A)
c sin(3A)
sin(A)− cos(3A)
cos(A)= 2
d cos(3A)
sin(A)+ sin(3A)
cos(A)= 2 cot(2A)
18 a tan(3A) + tan(A)
tan(3A) − tan(A)= 2 cos(2A)
b tan(A) − tan(B)
tan(A) + tan(B)= sin(A − B)
sin(A + B)
consolidatE
Topic 2 TrIgonoMeTry 83
c02Trigonometry.indd 83 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

c sin(A) − cos(A)
sin(A) + cos(A)− sin(A) + cos(A)
sin(A) − cos(A)= 2 tan(2A)
d cos(A) + sin(A)
cos(A) − sin(A)+ cos(A) − sin(A)
cos(A) + sin(A)= 2 sec(2A)
19 a sin(A)
1 − cos(A)= cot aA
2b b
sin(A)
1 + cos(A) = tan aA
2b
c 1 − cos(2A) + sin(2A)
1 + cos(2A) + sin(2A) = tan(A) d
sin(A) + sin(2A)
1 + cos(2A) + cos(A)= tan(A)
20 a sin(A + B)sin(A − B) = sin2(A) − sin2(B)
b tan(A + B)tan(A − B) = tan2(A) − tan2(B)
1 − tan2(A)tan2(B)
c cot(A + B) = cot(A)cot(B) − 1
cot(A) + cot(B)
d cot(A − B) = cot(A)cot(B) + 1
cot(B) − cot(A)
21 a sin(2A) = 2 tan(A)
1 + tan2(A)
b cos(2A) = 1 − tan2(A)
1 + tan2(A)
c cos3(A) − sin3(A)
cos(A) − sin(A)= 1 + 1
2 sin(2A)
d cos3(A) + sin3(A)
cos(A) + sin(A)= 1 − 1
2 sin(2A)
22 In a triangle with side lengths a, b and c, where C is a right angle and c the hypotenuse, show that:
a sin(2A) = 2abc2
b cos(2A) = b2 − a2
c2c tan(2A) = 2ab
b2 − a2
d sin aA2b = Å
c − b2c
e cos aA2b = Å
c + b2c
f tan aA2b = Å
c − bc + b
.
23 Chebyshev (1821–1894) was a famous Russian mathematician. Although he is known more for his work in the fields of probability, statistics, number theory and differential equations, Chebyshev also devised recurrence relations for trigonometric multiple angles. One such result is cos(nx) = 2 cos(x)cos((n − 1)x) − cos((n − 2)x).Using this result, show that:
a cos(4A) = 8 cos4(A) − 8 cos2(A) + 1b cos(5A) = 16 cos5(A) − 20 cos3(A) + 5 cos(A)c cos(6A) = 32 cos6(A) − 48 cos4(A) + 18 cos2(A) − 1.
MastEr
24 Chebyshev’s recurrence formula for multiple angles of the sine function is sin(nx) = 2 cos(x)sin((n − 1)x) − sin((n − 2)x). Using this result, show that:
a sin(4A) = cos(A)(4 sin(A) − 8 sin3(A))b sin(5A) = 16 sin5(A) − 20 sin3(A) + 5 sin(A)c sin(6A) = cos(A)(32 sin5(A) − 32 sin3(A) + 6 sin(A)).
Inverse trigonometric functionsInverse functionsAll circular functions are periodic and are many-to-one functions. Therefore, the inverses of these functions cannot be functions. However, if the domain is restricted so that the circular functions are one-to-one functions, then their inverses are functions.
The inverse sine functionThe sine function, y = sin(x), is a many-to-one function.
2
y
xπ–2
−π π 3π––2
0
1
3π––2
–
–1
–2
π– –2
Therefore, its inverse does not exist as a function. However there are many restrictions
of the domain, such as c−3π2
, −π2d , c−π
2, π2d or cπ
2, 3π
2d , that will ensure it is a one-to-
one function. For convenience, let c−π2
, π2d be the domain and [–1, 1] the range of the
restricted sine function.
f : c−π2
, π2d → [−1, 1]
0
y
xπ–2
1
–1–1, ( )
π–2
1, ( )
π– –2
π– –2
Therefore, it is a one-to-one function and its inverse exists.
The inverse of this function is denoted by sin−1. (An alternative notation is arcsin.)
2.6AOS 1
Topic 2
Concept 5
Restricted circular functionsConcept summaryPractice questions
Pafnuty Chebyshev
84 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 84 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

24 Chebyshev’s recurrence formula for multiple angles of the sine function is sin(nx) = 2 cos(x)sin((n − 1)x) − sin((n − 2)x). Using this result, show that:
a sin(4A) = cos(A)(4 sin(A) − 8 sin3(A))b sin(5A) = 16 sin5(A) − 20 sin3(A) + 5 sin(A)c sin(6A) = cos(A)(32 sin5(A) − 32 sin3(A) + 6 sin(A)).
Inverse trigonometric functionsInverse functionsAll circular functions are periodic and are many-to-one functions. Therefore, the inverses of these functions cannot be functions. However, if the domain is restricted so that the circular functions are one-to-one functions, then their inverses are functions.
The inverse sine functionThe sine function, y = sin(x), is a many-to-one function.
2
y
xπ–2
−π π 3π––2
0
1
3π––2
–
–1
–2
π– –2
Therefore, its inverse does not exist as a function. However there are many restrictions
of the domain, such as c−3π2
, −π2d , c−π
2, π2d or cπ
2, 3π
2d , that will ensure it is a one-to-
one function. For convenience, let c−π2
, π2d be the domain and [–1, 1] the range of the
restricted sine function.
f : c−π2
, π2d → [−1, 1]
0
y
xπ–2
1
–1–1, ( )
π–2
1, ( )
π– –2
π– –2
Therefore, it is a one-to-one function and its inverse exists.
The inverse of this function is denoted by sin−1. (An alternative notation is arcsin.)
2.6AOS 1
Topic 2
Concept 5
Restricted circular functionsConcept summaryPractice questions
Topic 2 TrIgonoMeTry 85
c02Trigonometry.indd 85 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

The graph of y = sin−1(x) is obtained from the graph of y = sin(x) by refl ection in the line y = x.
f : [−1, 1] → c−π2
, π2d , f
(x) = sin−1(x)
2
y
x
π–2
–20
1
–1
1–1
π– –2
2
–2–1, ( )
π–2
1, ( )
π– –2
There are an infi nite number of solutions to sin(x) = 12, for example π
6, 2π + π
6 and
4π + π6
, since we can always add any multiple of 2𝜋 to any angle and get the same
result. However, sin−1a12b means sin(x) = 1
2 and x ∈ c−π
2 , π
2d , so there is only one
solution in this case: π6
.
Find each of the following.
a sin−1(2) b sin−1asin a5π6bb c sin(sin−1(0.5))
tHinK WritE
a 1 Write an equivalent statement. a x = sin−1(2) sin(x) = 2
2 State the result. This does not exist. There is no solution to sin(x) = 2.
b 1 Use the known results. b Since sin a5π6b = 1
2,
x = sin−1asin a5π6bb = sin−1a1
2b
2 Write an equivalent statement and state the result.
sin(x) = 12 and x ∈ c−π
2, π2d
The only solution is x = π6
.
sin−1asin a5π6bb = π
6
c State the result. c sin(sin−1(0.5)) = 0.5
WorKeD eXaMPLe 161616
86 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 86 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

general results for the inverse sine functionIn general, we have the following results for the inverse sine function:
f : [−1, 1] → c−π2
, π2d , f
(x) = sin−1(x)
sin(sin−1(x)) = x if x ∈ [−1, 1]
sin−1(sin(x)) = x if x ∈ c−π2
, π2d
The inverse cosine functionThe cosine function, y = cos(x), is a many-to-one function.
π– –2
2
y
xπ–2
–π π 3π––2
0
1
3π––2
–
–1
–2
Therefore, its inverse does not exist as a function. However, there are many restrictions of the domain, such as [−π , 0] or [0 , π] or [π , 2π], that will ensure it is a one-to-one function. Let [0, 𝜋] be the domain and [–1, 1] the range of the restricted cosine function.
f : [0, π] → [−1, 1] where f(x) = cos(x).
2
y
xπ–2
−π π0
(0, 1)
(π, –1)
1
π– –2
–1
–2
Therefore, it is a one-to-one function and its inverse exists.
The inverse of this function is denoted by cos−1 . (An alternative notation is arccos.)
Topic 2 TrIgonoMeTry 87
c02Trigonometry.indd 87 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

The graph of y = cos−1(x) is obtained from the graph of y = cos(x) by refl ection in the line y = x.
f : [−1, 1] → [0, π], f(x) = cos−1(x)
2
2
y
x
π–2
π
0
1(1, 0)
1
4
4
3
3–1
–1
(–1, π)
–2
–2
–3
–3
–4
–4
There are an infi nite number of solutions to cos(x) = !22
, for example π4
, 2π + π4
,
4π + π4
, 2π − π4
and 4π − π4
, since we can always add any multiple of 2𝜋 to any
angle. However, cos−1a !22
b means cos(x) = !22
and x ∈ [0 , π], so there is only one
solution, namely π4
.
Find each of the following.
a cos−1 aFind each of the following.
aFind each of the following.
32b
Find each of the following.
bFind each of the following.
b cos−1 acos a5π4bb c cos acos−1a π
12bb
tHinK WritE
a 1 Write an equivalent statement. a x = cos−1 a3
2b
2 State the result. This does not exist. There is no solution to cos(x) = 32.
b 1 Use the known results. b Since cos a5π4b = −!2
2,
x = cos−1 acos a5π4bb = cos−1 a−!2
2b
2 Write an equivalent statement and state the result.
cos(x) = −!22
and x ∈ [0, π]
The only solution is x = 3π4
.
cos−1 acos a5π
4bb = 3π
4
c State the result. c cos acos−1 a π12
bb = π12
WorKeD eXaMPLe 171717
88 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 88 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

General results for the inverse cosine functionIn general, we � nd that:
f : [−1, 1] → [0, π], f (x) = cos−1(x)
cos(cos−1(x)) = x if x ∈ [−1, 1]
cos−1(cos(x)) = x if [0, π]
Find the exact value of cos asin−1 a13bbbbb .
THINK WRITE/DRAW
1 The inverse trigonometric functions are angles.
Let θ = sin−1 a1
3b so that sin(θ) = 1
3.
2 Draw a right-angled triangle and label the side lengths using the de� nition of the trigonometric ratios.
x
13
θ
3 Calculate the value of the third side using Pythagoras.
x2 + 12 = 32
x2 + 1 = 9 x2 = 9 − 1 x2 = 8 x = 2!2
4 State the required value. cos asin−1 a1
3bb = cos(θ)
= 2!23
13
θ22
WORKED EXAMPLE 181818
Double-angle formulasSometimes we may need to use the double-angle formulas.
sin(2A) = 2 sin(A)cos(A)
cos(2A) = cos2(A) − sin2(A)
= 2 cos2(A) − 1
= 1 − 2 sin2(A)
Topic 2 TRIGONOMETRY 89
c02Trigonometry.indd 89 20/08/15 11:39 AM
UNCORRECTED PAGE P
ROOFS

The inverse tangent functionThe tangent function, y = tan(x), is a many-to-one function.
2
4
y
x
–2
−π π−2π 2ππ–2
3π––2
π– –2
3π––2
–0
–4
Therefore, its inverse does not exist as a function. However, there are many
restrictions of the domain, such as a−3π2
, −π2b or a−π
2, π2b or aπ
2, 3π
2b, that will
ensure it is a one-to-one function.
Find the exact value of sin a2 cos−1 a25b b .
THINK WRITE/DRAW
1 The inverse trigonometric functions are angles. Let θ = cos−1 a2
5b so that cos(θ) = 2
5.
2 Draw a right-angled triangle and label the side lengths using the de� nition of the trigonometric ratios. Calculate the value of the third side using Pythagoras’ theorem.
x2 + 22 = 52
x2 + 4 = 25 x2 = 25 − 4 x2 = 21 x = !21
5
θ2
21
3 Use an appropriate double-angle formula.
sin(2θ) = 2 sin(θ)cos(θ)
= 2 × !215
× 25
4 State what is required. sin a2 cos−1 a2
5bb = 4!21
25
WORKED EXAMPLE 191919
90 MATHS QUEST 12 SPECIALIST MATHEMATICS VCE Units 3 and 4
c02Trigonometry.indd 90 20/08/15 11:40 AM
UNCORRECTED PAGE P
ROOFS

Let a−π2
, π2b be the domain and R the range of the restricted tangent function. Note
that we must have an open interval, because the function is not defined at x = ±π2
; at these points we have vertical asymptotes.
f : a−π2
, π2b → R, f (x) = tan(x)
2
4
y
x
–4
π–2
0–2
π– –2
Therefore, it is a one-to-one function and its inverse exists.
The inverse of this function is denoted by tan−1 . (An alternative notation is arctan.)
The graph of y = tan−1(x) is obtained from the graph of y = tan(x) by reflection in the line y = x.
f : R → a−π2
, π2b where f
(x) = tan−1(x)
Note that there horizontal asymptotes at y = ±π2
.
1
1 3 42
2
3
y
x
–2
–3
π– –2
π–2
0–1
–1–2–3–4
There are an infinite number of solutions to tan(x) = !3, for example, π3
, 2π + π3
and 4π + π3
, since we can always add any multiple of 2𝜋 to any angle. However,
tan−1(!3) means tan(x) = !3 and x ∈ a−π2
, π2b, so there is only one solution: π
3.
Topic 2 TrIgonoMeTry 91
c02Trigonometry.indd 91 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

general results for the inverse tan functionIn general, we fi nd that:
f : R → a−π2
, π2b, f (x) = tan−1(x)
tan(tan−1(x)) = x if x ∈ R
tan−1(tan(x)) = x if x ∈ a−π2
, π2b
Double-angle formulasIt may be necessary to use the double-angle formulas, such as tan(2A) = 2 tan(A)
1 − tan2 (A).
Find:
a tan−1 atan a11π6
bb b tan(tan−1(2)).
tHinK WritE
a 1 Use the known results. a tan a11π6
b = −!33
Let tan−1atan a11π6
bb = tan−1a−!33
b = x
2 Write an equivalent statement and state the result.
tan(x) = −!33
and x ∈ a−π2
, π2b
The only solution is x = −π6
.
tan−1atan a11π6
bb = −π6
b 3 State the result. b tan(tan−1(2)) = 2
WorKeD eXaMPLe 202020
Find the exact value of tan a2 tan−1a12b b .
tHinK WritE
1 The inverse trigonometric functions are angles. Let θ = tan−1 a1
2b so that tan(θ) = 1
2.
2 Use the double-angle formulas. tan(2θ) = 2 tan(θ)
1 − tan2(θ)
=2 × 1
2
1 − a12b2
= 1
1 − 14
= 134
3 State the result. tan a2 tan−1a12b b = 4
3
WorKeD eXaMPLe 212121
92 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 92 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

Compound-angle formulasWe may also need to use the compound-angle formulas:
sin(A + B) = sin(A)cos(B) + cos(A)sin(B)
sin(A − B) = sin(A)cos(B) − cos(A)sin(B)
cos(A + B) = cos(A)cos(B) − sin(A)sin(B)
cos(A − B) = cos(A)cos(B) + sin(A)sin(B)
tan(A + B) = tan(A) + tan(B)
1 − tan(A)tan(B)
tan(A − B) = tan(A) − tan(B)
1 + tan(A)tan(B)
Evaluate cos asin−1 a1213
b − tan−1 a34b b .
THINK WRITE/DRAW
1 The inverse trigonometric functions are angles. Use the de� nitions of the inverse trigonometric functions.
Let A = sin−1 a12
13b and B = tan−1
a34b.
Thus, sin(A) = 1213
and tan(B) = 34.
2 Draw the right-angled triangle and state the unknown side length using well-known Pythagorean triads.
5
A
1213
4B
35
3 State the ratios from the triangles. sin(A) = 1213
, cos(A) = 513
sin(B) = 35, cos(B) = 4
5
4 Substitute the ratios into the compound-angle formulas.
cos(A − B) = cos(A)cos(B) + sin(A)sin(B)
= 513
× 45
+ 1213
× 35
5 State the required result. cos asin−1a1213
b − tan−1a34b b = 56
65
WORKED EXAMPLE 222222
Topic 2 TRIGONOMETRY 93
c02Trigonometry.indd 93 20/08/15 11:40 AM
UNCORRECTED PAGE P
ROOFS

Determining maximal domains and ranges
For y = sin−1(x), the domain is [–1, 1] and the range is c−π2
, π2d .
For y = cos−1(x), the domain is [–1, 1] and the range is [0, π].
For y = tan−1(x), the domain is R and the range is a−π2
, π2b.
For inverse trigonometric functions that have been dilated or translated, we can apply these dilations and translations to determine the domain and range of the transformed function.
State the domain and range of:
a y = 2 cos−1 a3x − 25
b − 3 b y = 4 tan−1 a2x − 76
b + 1.
tHinK WritE
a 1 y = cos−1(x) has a domain of [–1, 1]. a `3x − 25
` ≤ 1
2 Use the defi nition of the modulus function.
−1 ≤ 3x − 25
≤ 1
3 Solve the inequality. −5 ≤ 3x − 2 ≤ 5
−3 ≤ 3x ≤ 7
4 State the domain. y = 2 cos−1a3x − 25
b − 3 has a maximal domain of
−1 ≤ x ≤ 73 or c−1, 7
3d .
5 y = cos−1(x) has a range of [0, π]. There is a dilation by a factor of 3 parallel to the y-axis and a translation of 2 units down parallel to the y-axis. The range is from 2 × 0 − 3 to 2 × π − 3.
6 State the range. y = 2 cos−1a4x − 35
b − 3 has a range of [−3, 2π − 3].
b 1 y = tan−1(x) has a domain of R. b y = 4 tan−1a2x − 76
b + 1 has a domain of R.
2 y = tan−1(x) has a range of a−π2
, π2b. There is a dilation by a factor of 4 parallel to the
y-axis and a translation of 1 unit up parallel to the
y-axis. The range is from 4 × −π2
+ 1 to 4 × π2
+ 1,
not including the end points.
3 State the range. y = 4 tan−1a2x − 76
b + 1 has a range of
(−2π + 1, 2π + 1).
WorKeD eXaMPLe 232323
94 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 94 20/08/15 10:42 AM
UNCORRECTED PAGE P
ROOFS

Inverse trigonometric functions
1 WE16 Find each of the following.
a sin−1(1.1) b sin−1 asin a5π
3bb c sin (sin−1(0.9))
2 Find each of the following.
a sin−1 a−65b b sin−1
asin a7π6bb c sin asin−1a1
3bb
3 WE17 Find each of the following.
a cos−1(1.2) b cos−1 acos a7π
6bb c cos acos−1aπ
6bb
4 Find each of the following.
a cos−1 a43b b cos−1
acos a11π3
bb c cos acos−1a14bb
5 WE18 Find the exact value of cos asin−1a15b b .
6 Find the exact value of sin acos−1a37b b .
7 WE19 Find the exact value of sin a2 cos−1a47b b .
8 Find the exact value of cos a2 sin−1a38b b .
9 WE20 Find:
a tan−1 atan a7π
6bb b tan (tan−1(1.1)).
10 Find:
a tan−1 atan a5π
3bb b tan atan−1a5
4bb.
11 WE21 Find the exact value of tan a2 tan−1a13b b
12 Find the exact value of cot a2 tan−1a14b b
13 WE22 Evaluate sin acos−1a35b − tan−1a 5
12b b .
14 Evaluate tan asin−1a35b − cot−1a 5
12b b .
15 WE23 State the domain and range of:
a y = 3 sin−1 a2x − 5
4b − 2π b y = 6
π tan−1 a3x − 5
4b + 2.
16 State the domain and range of:
a y = 4π cos−1(3x + 5) − 3 b y = 8
π tan−1(10x) + 3.
17 Evaluate each of the following.
a sin−1(1) b sin−1(1.3) c sin−1 a−"32
b
d cos−1(−1) e cos−1 a−1
2b f cos−1(−1.2)
g tan−1(!3) h tan−1 a−"33
b
ExErcisE 2.6
PractisE
consolidatE
Topic 2 TrIgonoMeTry 95
c02Trigonometry.indd 95 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

18 Evaluate each of the following.
a sin−1(sin(1.2)) b sin−1 asin aπ5bb c sin−1 asin a5π
6bb
d cos−1(cos(0.5)) e cos−1 acos a π
10bb f cos−1
acos a5π3bb
g tan−1 atan aπ
8bb h tan−1
atan a4π3bb
19 Evaluate each of the following.
a sin acos−1a12b b b cos asin−1a−!3
2b b c tan asin−1a−1
2b b
d sin(tan−1(−1)) e cos atan−1a− 1!3
b b f tan acos−1a−!22
b b
20 Evaluate each of the following.
a sin acos−1a29b b b tan acos−1a−2
3b b c tan asin−1a−5
6b b
d sin atan−1a58b b e cos asin−1a2
5b b f cos atan−1a−7
4b b
21 Evaluate each of the following.
a sin a2 cos−1a14b b b tan a2 sin−1a3
4b b c cos a2 tan−1a1
3b b
d sin a2 tan−1a23b b e tan a2 cos−1a1
5b b f cos a2 sin−1a2
5b b
22 Evaluate each of the following.
a sin acos−1a1213
b + sin−1a35b b b cos acos−1a4
5b − sin−1a 5
13b b
c cos atan−1a158b + cos−1a 9
41b b d sin atan−1a 8
15b − sin−1a60
61b b
23 Show that:
a cos−1a 725
b + tan−1a 724
b = π2
b sin−1a1213
b + tan−1a 512
b = π2
c sin−1a1517
b + tan−1a 815
b = π2
d tan−1(3) − tan−1a12b = π
4
e tan−1(4) − tan−1a35b = π
4f tan−1(5) − tan−1a2
3b = π
4.
24 Show that:
a 2 sin−1a35b = sin−1a24
25b b 2 sin−1a 7
25b = sin−1a336
625b
c 2 cos−1a14b = cos−1a−7
8b d 2 cos−1a2
3b = cos−1a−1
9b
e 2 tan−1a13b = tan−1a3
4b f 2 tan−1a1
4b = tan−1a 8
15b.
25 State the implied domain and range of each of the following.a y = 2 sin−1(x − 1) b y = 3 cos−1(x − 2) c y = 4 tan−1(x − 3)
d y = 5 sin−1ax3b e y = 6 cos−1ax
4b f y = 7 tan−1ax
5b
96 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 96 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

26 State the implied domain and range of each of the following.
a y = 2 sin−1(3x − 1) + π b y = 3 cos−1(2x − 5) − π
c y = 5 tan−1(4x + 3) − π2
d y = 4π sin−1a3 − 4x
5b + 2
e y = 5π cos−1a4 − 3x
7b − 4 f y = 8
π tan−1a5x − 34
b + 3
27 a State a sequence of transformations that, when applied to y = sin−1(x),
produce the graph of y = a + b sin−1axcb. Hence, state the domain and
range of y = a + b sin−1axcb.
b State a sequence of transformations that, when applied to y = cos−1(x), produce the graph of y = a + b cos−1(cx). Hence, state the domain and range of y = a + b cos−1(cx).
c State a sequence of transformations that, when applied to y = tan−1(x),
produce the graph of y = a + b tan−1axcb. Hence, state the domain and
range of y = a + b tan−1axcb.
28 Show that:
a sin−1(x) = cos−1("1 − x2) for x ∈ [0, 1]
b tan−1(x) + tan−1a1xb = π
2 for x > 0
c cos−1(x) = tan−1q"1 − x2
xr for x ∈ (0, 1)
d sin−1q a
"a2 + b2r + tan−1ab
ab = π
2 for a > 0 and b > 0
e cos−1q a
"a2 + b2r + tan−1aa
bb = π
2 for a > 0 and b > 0
f tan−1(x) − tan−1ax − 1x + 1
b = π4
for x > −1
g sin−1ax2 − 1x2 + 1
b = cos−1a 2xx2 + 1
b = tan−1ax2 − 12x
b for x > 0.
General solutions of trigonometric equationsIn this section consideration is given to the general solutions of trigonometric equations, rather than finding the solutions over a specified domain.
general solutions of trigonometric equationsTrigonometric equations can have an infinite number of solutions. To express the possible solutions mathematically, we derive formulas that will give the general solution in terms of any natural number n, where n ∈ Z.
MastEr
2.7
Topic 2 TrIgonoMeTry 97
c02Trigonometry.indd 97 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

general solutions involving sinesConsider the equation sin(x) = a. One answer is x = sin−1(a),
and if 0 < a < 1, then 0 < x < π2
, so x is in the fi rst quadrant.
Since sine is positive in the fi rst and second quadrants, there is also another answer, x = π − sin−1(a).
We can add or subtract any multiple of 2π to either answer and obtain an equivalent angle.
sin(x) = a
x = sin−1(a), 2π + sin−1(a), 4π + sin−1(a), …
x = π − sin−1(a), 3π − sin−1(a), 5π − sin−1(a), …
If n is any integer, then 2n is an even integer and 2n + 1 is an odd integer.
θ
π ‒ θ
general solutions involving cosinesConsider the equation cos(x) = a. One answer is x = cos−1(a).
If 0 < a < 1, then 0 < x < π2
, so x is in the fi rst quadrant.
Because cosine is positive in the fi rst and fourth quadrant, there is also another answer, x = 2π − cos−1(a).
We can add or subtract any multiple of 2π to either answer and obtain an equivalent angle.
cos(x) = a
x = cos−1(a), 2π + cos−1(a), 4π + cos−1(a), …
x = 2π − cos−1(a), 4π − cos−1(a), 6π − cos−1(a), …
The totality of solutions can be represented as x = 2nπ ± cos−1(a), where n ∈ Z.
Although we have demonstrated this result for 0 < a < 1, it is in fact true for −1 ≤ a ≤ 1.
The general solution of cos(x ) = a where −1 ≤ a ≤ 1The general solution of cos(x) = a where −1 ≤ a ≤ 1 is given by
x = 2nπ ± cos−1(a), where n ∈ Z.
θ2π ‒ θ
Find the general solution to the equation cos (x) = 12
.
tHinK WritE
1 State one solution. x = cos−1a12b = π
3
2 State the general solution. x = 2nπ ± π3
3 Take out a common factor so that the general solution can be written in simplest form.
x = π3
(6n ± 1) where n ∈ Z
WorKeD eXaMPLe 242424
98 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 98 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

general solutions involving tangentsConsider the equation tan(x) = a. One answer is x = tan−1(a),
and if a > 0, then 0 < x < π2
, so x is in the fi rst quadrant. Since
tangent is positive in the fi rst and third quadrants, there is also another answer, x = π + tan−1(a).
We can add or subtract any multiple of 2π to either answer and obtain an equivalent angle.
tan(x) = a
x = tan−1(a), 2π + tan−1(a), 4π + tan−1(a), …
x = π + tan−1(a), 3π + tan−1(a), 5π + tan−1(a), …
The totality of solutions can be represented as one solution: x = nπ + tan−1(a), where n ∈ Z.
θπ + θ
The totality of solutions can be represented as x = 2nπ + sin−1(a) or x = (2n + 1)π − sin−1(a), where n ∈ Z.
Although we have demonstrated this result for 0 < a < 1, it is true for −1 ≤ a ≤ 1.
The general solution of sin(x ) = a where −1 ≤ a ≤ 1The general solution of sin(x) = a where −1 ≤ a ≤ 1 is given by
x = 2nπ + sin−1(a), (2n + 1)π − sin−1(a), where n ∈ Z.
Find the general solution to the equation sin(x) = !3!3!2
.
tHinK WritE
1 State one solution. x = sin−1a!32
b = π3
2 State the general solution. x = 2nπ + π3
or x = (2n + 1)π − π3
3 Take out common factors in the fi rst solution so that the general solution can be written in simplest form.
x = 2nπ + π3
= π3
(6n + 1)
4 Take out common factors in the second solution
x = (2n + 1)π − π3
= 2nπ + π − π3
= 2nπ + 2π3
= 2π3
(3n + 1)
5 State the general solution. x = π3
(6n + 1), 2π3
(3n + 1) where n ∈ Z
WorKeD eXaMPLe 252525
Topic 2 TrIgonoMeTry 99
c02Trigonometry.indd 99 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

general solution of trigonometric equationsWhen solving more complicated trigonometric equations, often multiple solutions exist. We may be required to fi nd all solutions to each part of the equation being considered.
The general solution of tan(x ) = aThe general solution of tan(x) = a where a ∈ R is given by
x = nπ + tan−1(a), where n ∈ Z.
Although we have demonstrated this result only for a > 0, it is true for a ∈ R.
Find the general solution to the equation tan(x) = !3!3! .
tHinK WritE
1 State one solution. x = tan−1(!3) = π3
2 State the general solution. x = nπ + π3
3 Take out a common factor so that the general solution can be written in simplest form.
x = π3
(3n + 1) where n ∈ Z
WorKeD eXaMPLe 262626
Find the general solution to the equation 4 cos2(2x) − 3 = 0.
tHinK WritE
1 Make the trigonometric function the subject.
4 cos2(2x) − 3 = 0
cos2(2x) = 34
cos(2x) = ±!32
So that:
(1) cos(2x) = !32
or
(2) cos(2x) = −!32
2 Use the formula to fi nd the general solution of the fi rst equation.
cos(2x) = !32
2x = 2nπ ± cos−1a !32
b
2x = 2nπ ± π6
2x = π6
(12n ± 1)
x = π12
(12n ± 1)
WorKeD eXaMPLe 272727
100 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 100 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

general solutions involving phase shiftsWhen solving trigonometric equations involving phase shifts, we must solve the resulting equations for the unknown values of x.
3 Use the formula to fi nd the general solution of the second equation.
cos(2x) = −!32
2x = 2nπ ± cos−1 a−!3
2
b
2x = 2nπ ± 5π6
2x = π6
(12n ± 5)
x = π12
(12n ± 5)
4 State the fi nal general solutions. x = π12
(12n ± 1) or x = π12
(12n ± 5) where n ∈ Z
Find the general solution of !2!2! sina3x + π4b + 1 = 0.
tHinK WritE
1 Make the trigonometric function the subject. !2 sina3x + π4b + 1 = 0
!2 sina3x + π4b = −1
sina3x + π4b = − 1
!2
2 Use the formula to state the general solution. (1) 3x + π4
= 2nπ + sin−1a− 1!2
b or
(2) 3x + π4
= (2n + 1)π − sin−1a− 1!2
b
3 Solve the fi rst equation. 3x + π4
= 2nπ + sin−1a− 1!2
b
3x + π4
= 2nπ − π4
3x = 2nπ − π2
3x = π2
(4n − 1)
x = π6
(4n − 1)
WorKeD eXaMPLe 282828
Topic 2 TrIgonoMeTry 101
c02Trigonometry.indd 101 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

equations reducible to quadraticsEquations can often be reduced to quadratics under a suitable substitution.
4 Solve the second equation. 3x + π4
= (2n + 1)π − sin−1a− 1!2
b
3x + π4
= 2nπ + π + π4
3x = π(2n + 1)
x = π3
(2n + 1)
5 State the fi nal solutions. x = π6
(4n − 1) or π3
(2n + 1) n ∈ Z
Find the general solution of the equation 2 sin2(2x) + sin(2x) − 1 = 0.
tHinK WritE
1 Use a substitution. 2 sin2(2x) + sin(2x) − 1 = 0Let u = sin(2x).
2 Factorise. 2u2 + u − 1 = 0(2u − 1)(u + 1) = 0
3 Substitute back for u. (2 sin(2x) − 1)(sin(2x) + 1) = 0
4 Solve the trigonometric equation using the Null Factor Law.
(1) sin(2x) = 12 or (2) sin(2x) = −1
5 Find the general solution of the fi rst equation.
sin(2x) = 12
2x = 2nπ + sin−1a12b
2x = 2nπ + π6
2x = π6
(12n + 1)
x = π12
(12n + 1)
sin(2x) = 12
2x = (2n + 1)π − sin−1a12b
2x = 2nπ + π − π6
2x = 2nπ + 5π6
2x = π6
(12n + 5)
x = π12
(12n + 5)
WorKeD eXaMPLe 292929
102 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 102 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

Trigonometric equations involving multiple anglesWe can fi nd the general solutions to trigonometric equations involving multiple angles by applying the general solution formulas rather than expanding the multiple angles.
6 Find the general solution of the second equation.
sin(2x) = −12x = 2nπ + sin−1(−1)
2x = 2nπ − π2
2x = π2
(4n − 1)
x = π4
(4n − 1)
sin(2x) = −12x = (2n + 1)π − sin−1(−1)
2x = 2nπ + π + π2
2x = 2nπ + 3π2
2x = π2
(4n + 3)
x = π4
(4n + 3)
7 Sometimes some parts of the solution are already included in some other parts. Give n some values.
Let n = 0, 1, 2, 3, 4.
x = π4
(4n − 1)
⇒ x = −π4
, 3π4
, 7π4
, 11π
4 ,
15π4
x = π4
(4n + 3)
⇒ x = 3π4
, 7π4
, 11π
4 ,
15π4
We can see that the solution x = π4
(4n + 3) incorporates all
the solutions from x = π4
(4n − 1).
8 State all the general solutions of the equation.
x = π4
(4n − 1) or π12
(12n + 1) or π12
(12n + 5) where n ∈ Z.
Find the general solution to cos(4x) = sin(2x).
tHinK WritE
1 Rewrite using one trigonometric function. Convert sines into cosines, since the solution for cosine is easier to work with.
Use sinaπ2
− Ab = cos(A).
cos(4x) = sin(2x)
cos(4x) = cosaπ2
− 2xb
WorKeD eXaMPLe 303030
Topic 2 TrIgonoMeTry 103
c02Trigonometry.indd 103 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

Comparison of examplesNote that the last two worked examples, 29 and 30, are in fact the same, as
cos(4x) = sin(2x)
cos(2(2x)) = sin(2x) by double-angle formulas
1 − 2 (sin(2x))2 = sin(2x)2 sin2(2x) + sin(2x) − 1 = 0
and therefore they should have the same general solution. The two given answers do
not appear to be the same, although one answer, x = π4
(4n − 1), is common to both.
This situation is very common in these types of problems. However, if we substitute values of n, the two results generate the same particular solutions.
When n = 0, 1, 2, 3, 4, 5, 6 from Worked example 29:
x = π4
(4n − 1) ⇒ x = −π4
, 3π4
, 7π4
, 11π4
, 15π4
, 19π4
, 23π4
x = π12
(12n + 1) ⇒ x = π12
, 13π12
, 25π12
x = π12
(12n + 5) ⇒ x = 5π12
, 17π12
2 Solve using an appropriate general solution. 4x = 2nπ ± aπ2
− 2xb
(1) 4x = 2nπ + aπ2
− 2xb or
(2) 4x = 2nπ − aπ2
− 2xb
3 Solve the first equation. 4x = 2nπ + π2
− 2x
6x = 2nπ + π2
6x = π2
(4n + 1)
x = π12
(4n + 1)
4 Solve the second equation. 4x = 2nπ − π2
+ 2x
2x = 2nπ − π2
2x = π2
(4n − 1)
x = π4
(4n − 1)
5 State the general solutions of the equation. x = π12
(4n + 1) or π4
(4n − 1) where n ∈ Z.
104 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 104 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

When n = 0, 1, 2, 3, 4, 5, 6 from Worked example 30:
x = π4
(4n − 1) ⇒ x = −π4
, 3π4
, 7π4
, 11π4
, 15π4
, 19π4
, 23π4
x = π12
(4n + 1) ⇒ x = π12
, 5π12
, 9π12
, 13π12
, 17π12
, 21π12
, 25π12
It is interesting to compare these results to those obtained by CAS calculators. In some cases a calculator will not solve the equation for the general solution, and in other cases it will. The solution obtained by CAS may be in a different form to our answers above. The results may be given differently depending on the MODE, which could be set to either Exact or Auto.
General solutions of trigonometric equations
1 WE24 Find the general solution to the equation cos(x) = !22
.
2 Determine the general solution of 2 cos(2x) + !3 = 0.
3 WE25 Find the general solution to the equation sin(x) = 12.
4 Determine the general solution of 2 sin(2x) + !3 = 0.
5 WE26 Find the general solution to the equation tan(x) = 1.
6 Find the general solution to tan(2x) + !3 = 0.
7 WE27 Find the general solution to the equation 4 cos2(2x) − 1 = 0.
8 Find the general solution to the equation 3 tan2(2x) − 1 = 0.
9 WE28 Find the general solution of 2 sin a3x + π6b − 1 = 0.
10 Find the general solution of 2 cos a2x − π6b + !3 = 0.
11 WE29 Find the general solution to 2 sin2(2x) − 3 sin(2x) + 1 = 0.
12 Find the general solution to the equation 2 cos2(2x) + cos(2x) − 1 = 0.
13 WE30 Find the general solution to cos(3x) = sin(2x).
14 Find the general solution to cos(4x) = sin(3x).
15 Find the general solution to each of the following equations.
a 2 cos(3x) − !3 = 0 b 2 cos(2x) + 1 = 0c !2 sin(2x) + 1 = 0 d 2 sin(3x) + 1 = 0
16 Find the general solution to each of the following equations.
a 4 sin2(2x) − 3 = 0 b 2 sin2(2x) − 1 = 0c 4 cos2(3x) − 1 = 0 d 2 cos2(3x) − 1 = 0
17 Find the general solution to each of the following equations.
a tan(x) + !3 = 0 b !3 tan(3x) − 1 = 0c tan2(2x) − 3 = 0 d 3 tan2(2x) − 1 = 0
18 Find the general solution to each of the following equations.
a 2 sin2(2x) + sin(2x) = 0 b cos2(2x) − cos(2x) = 0c 2 cos2(2x) + !3 cos(2x) = 0 d 2 sin2(2x) − !3 sin(2x) = 0
ExErcisE 2.7
PractisE
consolidatE
Topic 2 TrIgonoMeTry 105
c02Trigonometry.indd 105 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

19 Find the general solution to each of the following equations.
a 2 sin2(2x) + 3 sin(2x) + 1 = 0 b 2 cos2(2x) − 3 cos(2x) + 1 = 0
20 Find the general solution to each of the following equations.
a !2 sina3x − π4b − 1 = 0 b 2 sina2ax + π
6bb + 1 = 0
21 Find the general solution to each of the following equations.
a 2 cosa2x + π6b + !3 = 0 b 2 cosa3ax − π
12bb − 1 = 0
22 Find the general solution to each of the following equations.
a tana3x + π4b − 1 = 0 b !3 tana2ax − π
12bb + 1 = 0
23 Find the general solution to each of the following equations.
a tan2(x) + (!3 + 1)tan(x) + !3 = 0b tan2(x) + (!3 − 1)tan(x) − !3 = 0
24 Find the general solution to each of the following equations.
a sin(2x) = sin(x) b cos(x) = cos(2x)
25 Find the general solution to each of the following equations.
a 2 sin3(x) + sin2(x) − 2 sin(x) − 1 = 0b 2 cos3(x) − cos2(x) − 2 cos(x) + 1 = 0
26 Find the general solution to each of the following equations.
a tan3(x) − tan2(x) − tan(x) + 1 = 0b tan4(x) − 4 tan2(x) + 3 = 0
Graphs of reciprocal trigonometric functionsTopic 1 described how the graph of f(x) can be used to find the graph of 1
f(x). We can
use this method to graph sec(x) = 1cos(x)
, cosec(x) = 1sin(x)
and cot(x) = 1tan(x)
.
The graph of y = sec(x )Consider the graph of y = cos(x).
2
3
4
y
x
–2
−π π–2
3π––2
π0–1
–4
–3
3π––2
–
1
π– –2
MastEr
2.8AOS 1
Topic 2
Concept 2
Sketch graphs of reciprocal circular functionsConcept summaryPractice questions
106 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 106 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

In the portion of the graph shown, the x-intercepts occur at −3π2
, −π2
, π2
and 3π2
. This
means that the reciprocal function will have vertical asymptotes at x = −3π2
, x = −π2
,
x = π2
and x = 3π2
. The horizontal asymptote will be y = 0.
The graph of y = cos(x) is below the x-axis for −3π2
< x < −π2
and passes through
the point (–π, –1). This means that y = 1cos(x)
will also be below the x-axis in this
interval and will pass through the point (–π, –1). It will follow a similar pattern in
the region π2
< x < 3π2
.
In the region −π2
< x < π2
, the graph of y = cos(x) is above the x-axis and passes
through the point (0, 1). This means that y = 1cos(x)
will also be above the x-axis and
will pass through (0, 1).
The graph of y = 1cos(x)
(or y = sec(x)) is shown below.
2
3
4
y
x
–2
−π π0–1
–4
–3
1
π–2
3π––2
– 3π––2
π– –2
The graph of y = cosec(x )In a similar fashion, the graph of y = sin(x) can be used to determine the graph
of y = 1sin(x)
(or y = cosec(x)).
The graph of y = sin(x) is shown below.
2
3
y
x
–2
−π π–2
π−2π 2ππ– –2
3π––2
0–1
–3
3π––2
–
1
Note that in this instance, the x-intercepts occur at –2π, –π, 0, π and 2π.
Topic 2 TrigonomeTry 107
c02Trigonometry.indd 107 20/08/15 10:52 AM
UNCORRECTED PAGE P
ROOFS

The graph of y = 1sin(x)
looks like the following.
2
3
4
y
xπ–2
−π π−2π 2ππ– –2
3π––2
0–1
3π––2
–
1
–2
–4
–3
Use the graph of y = 2 cos(x) to sketch y = 12 cos(x)
over the domain
−2π ≤ x ≤ 2π.
tHinK WritE/draW
1 Sketch y = 2 cos(x).
Period: 2πAmplitude: 2
Horizontal shift: 0
Vertical shift: 0
3
4
y
xπ–2
−π π−2π 2π3π––2
0–1
2
π– –2
3π––2
–
1
–2
–4
–3
2 Find the x-intercepts and hence the vertical asymptotes for the reciprocal graph.
x-intercepts occur at x = −3π2
, x = −π2
, x = π2
and x = 3π2
. These will
be the vertical asymptotes for the reciprocal function.
3
4
y
x−π π−2π 2ππ–2
3π––2
0–1
2
π– –2
3π––2
–
1
–2
–4
–3
WorKeD eXaMPLe 313131
108 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 108 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

3 The graph of y = 2 cos(x) is above the x-axis in the
regions −2π ≤ x < −−3π2
,
−π2
< x < π2
and
3π2
< x ≤ 2π. The graph of
y = 12 cos(x)
will also be
above the x-axis in these regions. A maximum value of y = 2 is reached in the original graph, meaning
that a minimum of y = 12
will be reached in the reciprocal graph.
2
3
4
y
x
–2
−2π −π π 2π0–1
–4
–3
1
π– –2
π–2
3π––2
– 3π––2
4 The graph of y = 2 cos(x) is below the x-axis in the
regions −3π2
< x < −π2
and π2
< x < 3π2
.
Therefore, y = 12 cos(x)
is also below the x-axis in these regions. The minimum of y = −2 will become a maximum of y = −1
2.
2
3
4
y
x
–2
−2π −π π 2π0–1
–4
–3
1
π– –2
π–2
3π––2
– 3π––2
Use the graph of y = sinax2b to sketch y = 1
sinax2b
over the domain
−2π ≤ x ≤ 2π.
tHinK WritE/draW
1 Sketch y = sinax2b.
Period: 4πAmplitude: 1
Horizontal shift: 0
Vertical shift: 0
2
3
y
x
–2
−2π −π π 2π–1
–3
1
π–2
3π––2
π– –2
3π––2
–0
WorKeD eXaMPLe 323232
Topic 2 TrIgonoMeTry 109
c02Trigonometry.indd 109 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

2 Find the x-intercepts and hence the vertical asymptotes for the reciprocal graph.
x-intercepts occur at x = −2π, x = 0 and x = 2π. These will be the vertical asymptotes for the reciprocal function.
2
3
4
y
x
–2
−π π−2π 2π–1
–4
–3
1
π–2
3π––2
π– –2
3π––2
–0
3 The graph of y = sinax2b
is above the x-axis in the region 0 < x ≤ 2π. The
graph of y = 1
sinax2b
will also be above the x-axis in this region. A maximum value of y = 1 is reached in the original graph, meaning that a minimum of y = 1 will be reached in the reciprocal graph.
2
3
4
y
x
–2
−π π−2π 2π–1
–4
–3
1
π–2
3π––2
π– –2
3π––2
–0
4 The graph of y = sinax2b
is below the x-axis in the region −2π ≤ x < 0.
The graph of y = 1
sinax2b
is also below the x-axis in this region. The minimum of y = −1 will become a maximum of y = −1.
2
3
4
y
x
–2
−π π−2π 2π–1
–3
1
π–2
3π––2
π– –2
3π––2
–0
–4
110 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 110 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

The graph of y = cot(x )The graph of y = tan(x) can be used to find the graph of y = 1
tan(x) (or y = cot(x)).
The graph of y = tan(x) is shown below.
4
6
8
y
x
–4
−π π−2π 2π–2
–6
2
π–2
3π––2
π– –2
3π––2
–0
–8
In the portion of the graph shown, the x-intercepts occur at –2π, –π, 0, π and 2π. This means that the reciprocal function will have vertical asymptotes at x = −2π, x = −π, x = 0, x = π and x = 2π.
y = tan(x) has asymptotes at, x = −3π2
, x = −π2
, x = π2
and x = 3π2
. Therefore, the
reciprocal function will have x-intercepts at these positions.
Remembering that sections of the graph that are above the x-axis for y = tan(x) will
also be above the x-axis for y = 1tan(x)
and similarly for sections below the x-axis, the
graph of y = 1tan(x)
(or y = cot (x)) looks like this:
4
6
8
y
x−π π−2π 2π
–6
2
π–2
3π––2
π– –2
3π––2
–0
–8
–4
–2
Topic 2 TrIgonoMeTry 111
c02Trigonometry.indd 111 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

Use the graph of y = tanax2b to sketch y = 1
tanax2b
over the domain
−2π ≤ x ≤ 2π.
tHinK WritE/draW
1 Sketch y = tanax2b.
Period: 2πDilation: 1
Horizontal shift: 0
Vertical shift: 0
4
6
8
y
x
–4
–π π–2π 2π–2
–6
2
π–2
3π––2
–0
–8
π– –2
3π––2
2 The graph of y = tanax2b
has asymptotes at x = −π and x = π. These will be the x-intercepts of the reciprocal function.
The x-intercepts will be x = −π and x = π.
3 Find the x-intercepts for
y = tanax2b and hence
the vertical asymptotes
for the reciprocal graph.
x-intercepts occur at x = −2π, x = 0 and x = 2π. These will be the vertical asymptotes for the reciprocal function.
4
6
8
y
x
–4
–π π–2π 2π–2
–6
2
π–2
3π––2
–0
–8
π– –2
3π––2
WorKeD eXaMPLe 333333
112 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 112 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

Sketch the graph of y = 1
sinax + π4b
+ 1 over the domain [−π, 2π].
tHinK WritE/draW
1 Use the graph of y = sinax + π4b to fi nd
the graph of y = 1
sinax + π4b
.
Amplitude: 1
Period: 2πHorizontal shift: π
4 left
Vertical shift: 0
2
3
y
x–π 2π–1
–3
1
π–2
π–4
0
–4
π– –4
π3π––4
–π– –2
3π––4
3π––2
7π––4
–2
5π––4
4
WorKeD eXaMPLe 343434
Transformations of reciprocal trigonometric graphsTransformations can also be applied to the reciprocal trigonometric graphs.
4 If we consider the region between x = −2π and x = 0, the graph of
y = tanax2b is initially
above the x-axis between x = −2π and x = −π and is then below the x-axis. This will also be true for the reciprocal function.
4
6
8
y
x–π π–2π 2π–2
–6
2
π–2
3π––2
–0
–8
π– –2
3π––2
–4
5 In a similar fashion, the graph for x = 0 to x = 2π can be obtained.
4
6
8
y
x–π π–2π 2π–2
–6
2
π–2
3π––2
–0π
– –2
3π––2
–4
Topic 2 TrIgonoMeTry 113
c02Trigonometry.indd 113 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

8 Sketch the graph of y = 12
secax + π4b − 1 over the domain [−π, 2π].
9 Use the graph of y = 4 sin(x) to sketch y = 14 sin(x)
over the domain [−π, π].
10 Use the graph of y = cosax2b to sketch y = 1
cosax2b
over the domain [−π, π].
11 Use the graph of y = tanax3b to sketch y = 1
tanax3b
over the domain [−3π, 3π].
12 Sketch y = sec(x) + 1 over the domain [0, 2π].
13 Sketch y = 12
cosecax2b over the domain [0, 2π].
14 Sketch y = cotax4b − 2 over the domain [−2π, 2π]
15 Sketch y = 2 sec(x) − 1 over the domain [−2π, 2π].
16 Sketch y = 2
sinax + π4b
over the domain [−π, π].
17 Sketch y = 0.25 cosecax − π4b over the domain [−π, π].
18 Sketch y = 3 seca2x + π2b − 2 over the domain [−π, π].
19 Use the graph of y = sin(x) + 2 to sketch y = 1sin(x) + 2
over the domain
c−5π2
, 5π2d . Sketch both graphs on the same set of axes. Check your
graphs with CAS.
20 a Use the graph of y = cos2(x) to sketch y = 1cos2(x)
over the domain c−3π2
, 3π2d .
Sketch both graphs on the same set of axes. Check your graphs with CAS.
b Hence, determine the graph of y = tan2(x) for the same domain.
Graphs of inverse trigonometric functionsThere are at least two possible approaches to sketching inverse trigonometric functions. The first method is to find the inverse of the function (which will be a trigonometric function) and use your knowledge of trigonometric functions to sketch the trigonometric function and its inverse.
Alternatively, you could use your knowledge about transforming equations to transform y = sin−1(x), y = cos−1(x) or y = tan−1(x) as required. In the following worked examples, we will find the original trigonometric function and then sketch both functions.
consolidatE
MastEr
2.9AOS 1
Topic 2
Concept 6
Graphs of inverse circular functionsConcept summaryPractice questions
2 Consider the graph of y = 1
sinax + π4b
.
The asymptotes will occur at x = −π4
,
x = 3π4
and x = 7π4
.
2
3
y
x–π 2π–1
–3
1
π–2
π–4
0
–4
π– –4
ππ– –2
3π––4
3π––2
7π––4
–2
5π––4
4
3π––4
–
3 To graph y = 1
sinax + π4b
+ 1,
move y = 1
sinax + π4b
up 1.2
3
y
x–π 2π–1
–3
1
π–2
π–4
0
–4
π– –4
π3π––4
7π––4
–2
5π––4
4
3π––4
–π– –2
3π––2
Graphs of reciprocal trigonometric functions1 WE31 Use the graph of y = 4 cos(x) to sketch y = 1
4 cos(x) over the domain
−2π ≤ x ≤ 2π.
2 Use the graph of y = 2 sin(x) to sketch y = 12 sin(x)
over the domain
−2π ≤ x ≤ 2π.
3 WE32 Use the graph of y = sin(2x) to sketch y = 1sin(2x)
over the domain
−2π ≤ x ≤ 2π.
4 Use the graph of y = cos(2x) to sketch y = 1cos(2x)
over the domain
−2π ≤ x ≤ 2π.
5 WE33 Use the graph of y = tan(2x) to sketch y = 1tan(2x)
over the domain
−2π ≤ x ≤ 2π.
6 Use the graph of y = tan(3x) to sketch y = 1tan(3x)
over the domain
−2π ≤ x ≤ 2π.
7 WE34 Sketch the graph of y = cotax + π4b + 1 over the domain [−π, 2π].
ExErcisE 2.8
PractisE
114 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 114 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

8 Sketch the graph of y = 12
secax + π4b − 1 over the domain [−π, 2π].
9 Use the graph of y = 4 sin(x) to sketch y = 14 sin(x)
over the domain [−π, π].
10 Use the graph of y = cosax2b to sketch y = 1
cosax2b
over the domain [−π, π].
11 Use the graph of y = tanax3b to sketch y = 1
tanax3b
over the domain [−3π, 3π].
12 Sketch y = sec(x) + 1 over the domain [0, 2π].
13 Sketch y = 12
cosecax2b over the domain [0, 2π].
14 Sketch y = cotax4b − 2 over the domain [−2π, 2π]
15 Sketch y = 2 sec(x) − 1 over the domain [−2π, 2π].
16 Sketch y = 2
sinax + π4b
over the domain [−π, π].
17 Sketch y = 0.25 cosecax − π4b over the domain [−π, π].
18 Sketch y = 3 seca2x + π2b − 2 over the domain [−π, π].
19 Use the graph of y = sin(x) + 2 to sketch y = 1sin(x) + 2
over the domain
c−5π2
, 5π2d . Sketch both graphs on the same set of axes. Check your
graphs with CAS.
20 a Use the graph of y = cos2(x) to sketch y = 1cos2(x)
over the domain c−3π2
, 3π2d .
Sketch both graphs on the same set of axes. Check your graphs with CAS.
b Hence, determine the graph of y = tan2(x) for the same domain.
Graphs of inverse trigonometric functionsThere are at least two possible approaches to sketching inverse trigonometric functions. The first method is to find the inverse of the function (which will be a trigonometric function) and use your knowledge of trigonometric functions to sketch the trigonometric function and its inverse.
Alternatively, you could use your knowledge about transforming equations to transform y = sin−1(x), y = cos−1(x) or y = tan−1(x) as required. In the following worked examples, we will find the original trigonometric function and then sketch both functions.
consolidatE
MastEr
2.9AOS 1
Topic 2
Concept 6
Graphs of inverse circular functionsConcept summaryPractice questions
Topic 2 TrIgonoMeTry 115
c02Trigonometry.indd 115 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

Sketch y = sin−1(2x).
tHinK WritE/draW
1 Find the inverse of y = sin−1(2x). y = sin−1(2x)2x = sin( y) x = 1
2 sin( y)
Therefore, the inverse is y = 12
sin(x).
2 Sketch y = 12 sin(x).
Amplitude: 12
Period: 2πHorizontal shift: 0
Vertical shift: 0
y = 12
sin(x)
1
2y
x
–1
π– –2
−π−2π π–2
3π––2
π 2π0
–2
3π––2
–
3 The domain needs to be restricted so that the function is one-to-one. The domain
becomes c−π2
, π2d .
Restrict the domain to c−π2
, π2d .
1
2y
x
–1
π– –2
−π−2π π–2
3π––2
π 2π0
–2
3π––2
–
4 The domain and range of y = 12 sin(x)
become the range and domain of y = sin−1(2x) respectively.
y = 12
sin(x):
Domain c−π2
, π2d , range c−1
2, 1
2d
y = sin−1(2x):
Domain c−12
, 12d , range c−π
2, π
2d
5 Use the graph of y = 12 sin(x) to sketch
y = sin−1(2x) by refl ecting the graph in the line y = x.
y
x–2π– –4
π– –2
π–2
π–4
0–1 1 5432 6–4–5–6 –3
WorKeD eXaMPLe 353535
116 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 116 20/08/15 10:43 AM
UNCORRECTED PAGE P
ROOFS

Sketch y = cos−1(x + 5)
tHinK WritE/draW
1 Find the inverse of y = cos−1(x + 5). y = cos−1(x + 5)x + 5 = cos( y) x = cos( y) − 5Therefore, y = cos(x) − 5.
2 Sketch y = cos(x) − 5.
Amplitude: 1
Period: 2πHorizontal shift: 0
Vertical shift: 5 down
y = cos(x) − 5
–2
–3
−4
0
–1
1
y
x
−5
−6
π– –2
−π−2π π–2
3π––2
π3π––2
–5π––2
–
3 The domain needs to be restricted so that the function is one-to-one. The domain becomes [0, π].
Restrict the domain to [0, π].
–2
–3
−4
0
–1
1
y
x
−5
−6
π– –2
−π−2π π–2
3π––2
π3π––2
–5π––2
–
4 The domain and range of y = cos(x) − 5 become the range and domain of y = cos−1 (x + 5) respectively.
y = cos(x) − 5:Domain [0, π], range [−6, −4]y = cos−1(x + 5):Domain [−6, −4], range [0, π]
WorKeD eXaMPLe 363636
Topic 2 TrIgonoMeTry 117
c02Trigonometry.indd 117 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

Sketch y = 3 tan−1(x).
tHinK WritE/draW
1 Find the inverse of y = 3 tan−1(x).
y = 3 tan−1(x)y3
= tan−1(x)
x = tanay3b
Therefore y = tanax3b .
2 Sketch y = tanax3b.
Period: 3πHorizontal shift: 0
Vertical shift: 0
π– –2
π– –2
π–2
π–2
y
x
π
π
2π
2π0
3π
3π
3π––2
3π––2
5π––2
5π––2
−π
−π
−2π
−2π
−3π
−3π
3π––2
–
3π––2
–
5π––2
–
5π––2
–
WorKeD eXaMPLe 373737
5 Use the graph of y = cos(x) − 5 to sketch y = cos−1(x + 5) by refl ecting the graph in the line y = x.
–2–3−4 0–1 54321 6
y
x−5−6−7−8−9
π– –2
−π
π
−2π
π–2
3π––2
–
118 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 118 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

3 The domain needs to be restricted so that the function is one-to-one. The domain
becomes a−3π2
, 3π2b.
π– –2
π– –2
y
xπ–2
π–2
π
π
2π
2π0
3π
3π
3π––2
3π––2
5π––2
5π––2
−π
−π
−2π
−2π
−3π
−3π
3π––2
–
3π––2
–
5π––2
–
5π––2
–
4 The domain and range of
y = tanax3b become the range
and domain of y = 3 tan−1(x) respectively.
y = tanax3b : Domain a−3π
2, 3π
2b , range R
y = 3 tan−1(x): Domain R, range a−3π2
, 3π2b
5 Use the graph of y = tanax3b
to sketch y = 3 tan−1(x) by reflecting the graph in the line y = x.
0
y
x
π–2
π –2
π
π
2π
2π 3π
3π––2
3π––2
5π––2
5π––2π– –
2
π– –2
−π
−π
−2π
−2π
−3π 3π––2
–
3π––2
–
5π––2
–
5π––2
–
Topic 2 TrIgonoMeTry 119
c02Trigonometry.indd 119 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

Sketch y = sin−1(x) + π4
tHinK WritE/draW
1 The graph of
y = sin−1(x) + π4
is the graph
of y = sin−1(x) raised by π4
units. Sketch y = sin−1(x).
0
y
–0.5 0.5 21.51–1.5 –1–2 x
π– –2
π– –4
π–2
π–4
2 Raise the graph by π4
.
This means that the
range is now c−π4
, 3π4d
0
y
–0.5 0.5 21.51–1.5 –1–2 x
π– –4
π–4
π– –2
π–2
WorKeD eXaMPLe 383838
The next worked example is completed by transforming the inverse trigonometric function.
Graphs of inverse trigonometric functions1 WE35 Sketch y = cos−1(2x).
2 Sketch y = tan−1(2x).
3 WE36 Sketch y = sin−1(x + 3).
ExErcisE 2.9
PractisE
4 Sketch y = tan−1(x − 3).
5 WE37 Sketch y = 2 sin−1(x).
6 Sketch y = 2 cos−1(x).
7 WE38 Sketch y = cos−1(x) − π4
.
8 Sketch y = tan−1(x) + π3
.
9 Sketch y = sin−1ax2b.
10 Sketch y = tan−1ax3b.
11 Sketch y = cos−1(4x).
12 Sketch y = tan−1(x − 3).
13 Sketch y = sin−1(2x + 1).
14 Sketch y = cos−1(3x − 2).
15 Sketch y = 3 cos−1(x).
16 Sketch y = 3 sin−1(2x).
17 Sketch y = 2 tan−1(x) + π4
.
18 Sketch y =cos−1(2x − 3)
π + 1.
19 a Draw the graph of y = sec(x).
b Identify a suitable domain to make y = sec(x) a one-to-one function.c Sketch the graph of y = sec−1(x).
20 Sketch y =cot−1(x + 1)
π − 2.
consolidatE
AOS 1
Topic 2
Concept 7
Transformations of inverse circularfunctionsConcept summaryPractice questions
MastEr
120 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 120 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

4 Sketch y = tan−1(x − 3).
5 WE37 Sketch y = 2 sin−1(x).
6 Sketch y = 2 cos−1(x).
7 WE38 Sketch y = cos−1(x) − π4
.
8 Sketch y = tan−1(x) + π3
.
9 Sketch y = sin−1ax2b.
10 Sketch y = tan−1ax3b.
11 Sketch y = cos−1(4x).
12 Sketch y = tan−1(x − 3).
13 Sketch y = sin−1(2x + 1).
14 Sketch y = cos−1(3x − 2).
15 Sketch y = 3 cos−1(x).
16 Sketch y = 3 sin−1(2x).
17 Sketch y = 2 tan−1(x) + π4
.
18 Sketch y =cos−1(2x − 3)
π + 1.
19 a Draw the graph of y = sec(x).
b Identify a suitable domain to make y = sec(x) a one-to-one function.c Sketch the graph of y = sec−1(x).
20 Sketch y =cot−1(x + 1)
π − 2.
consolidatE
AOS 1
Topic 2
Concept 7
Transformations of inverse circular functionsConcept summaryPractice questions
MastEr
Topic 2 TrIgonoMeTry 121
c02Trigonometry.indd 121 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

studyON is an interactive and highly visual online tool that helps you to clearly identify strengths and weaknesses prior to your exams. You can then con� dently target areas of greatest need, enabling you to achieve your best results.
ONLINE ONLY 2.10 Review www.jacplus.com.au
the Maths Quest review is available in a customisable format for you to demonstrate your knowledge of this topic.
the review contains:• short-answer questions — providing you with the
opportunity to demonstrate the skills you have developed to ef� ciently answer questions using the most appropriate methods
• Multiple-choice questions — providing you with the opportunity to practise answering questions using CAS technology
• Extended-response questions — providing you with the opportunity to practise exam-style questions.
a summary of the key points covered in this topic is also available as a digital document.
REVIEW QUESTIONSDownload the Review questions document from the links found in the Resources section of your eBookPLUS.
122 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
Units 3 & 4 Trigonometry
Sit topic test
c02Trigonometry.indd 122 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

2 AnswersExErcisE 2.21 2!3
3
2 −2!33
3 −!212
4 −!174
5 a 2!33
b −!2 c −2 d !2
6 a 2!33
b 2 b −!2 c −2!33
7 a !3 b −!33
c −1 d −!3
8 a −3!24
b −!15
9 a 3!1020
b −5!2121
10 a −7!1020
b −5!3939
11 a −!1515
b !616
12 a !312
b −!17
13 a −6!3535
b !295
14 a !153
b −!155
15 ( p2 − pq − q2)"p2 − q2
q( p2 − q2)
16 "a2 − b2
a + b
ExErcisE 2.3Refer to Maths Quest 12 VCE Specialist Maths Solutions Manual.
ExErcisE 2.41 !3
2
2 12
3 2!3 cos(θ ) − 2 sin(θ )
4 sin(θ ) + cos(θ )
5 −cos(θ )
6 −sin(θ )
7 14(!6 + !2)
8 !3 − 2
9 −8485
10 − 641025
11 a !32
b 0 c 12 d −!2
2
12 a !33
b !3
13 a sin(θ ) − cos(θ ) b !3 cos(θ ) + sin(θ )
c !3 cos(θ ) + sin(θ ) d cos(θ ) − sin(θ )
14 a cos(θ ) b sin(θ )
c −sin(θ ) d −cos(θ )
15 a −cos(θ ) b sin(θ )
c −tan(θ ) d tan(θ )
16 a !3 cos(x) b −1
c −!3 sin(x) d sin(x)
17 a 14(!2 − !6) b 2 − !3
c 14(!6 − !2) d 2 + !3
18 a 5665
b −6316
19 a −253325
b −204325
20 a −8!521
b −1921
21 ab + "1 − a2 "1 − b2
b"1 − a2 − a"1 − b2
22 a2 + 2!a + 1 !2a + 1
aa!2a + 1 − 2!a + 1b
ExErcisE 2.51 −!2
4
2 −!22
3 a 4!29
b −79 c −4!2
7
4 a 5665
b 3365
c 5633
5 π3
, π2
, 2π3
, 3π2
6 π2
, 7π6
, 3π2
, 11π
6
7–12 Check with your teacher.
13 a !24
b −!22
c −!22
d !33
14 a 3!5532
b −2332
c −3!5523
15 a 0, π3
, π, 5π3
, 2π b 0, 2π3
, 4π3
, 2π
c π6
, 5π6
, 3π2
d π6
, π2
, 5π6
, 3π2
16 a 0, π4
, 3π4
, 5π4
, 7π4
, 2π
b π3
, π2
, 2π3
, 3π2
c 0, π6
, π2
, 5π6
, π, 7π6
, 3π2
, 11π
6, 2π
d π12
, π4
, 5π12
, 3π4
, 13π12
, 5π4
, 17π12
, 7π4
17–24 Check with your teacher.
Topic 2 TrIgonoMeTry 123
c02Trigonometry.indd 123 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

ExErcisE 2.61 a Does not exist b −π
3 c 0.9
2 a Does not exist b −π6
c 13
3 a Does not exist b 5π6
c π6
4 a Does not exist b π3
c 14
5 2!65
6 2!107
7 8!3349
8 2332
9 a π6
b 1.1
10 a −π3
b 54
11 34
12 158
13 3365
14 −3356
15 a Domain c12
, 92d , range c−7π
2, −π
2d
b Domain R, range (–1, 5)
16 a Domain c−2, −43d , range [–3, 1]
b Domain R, range (–1, 7)
17 a π2
b Does not exist
c −π3
d π
e 2π3
f Does not exist
g π3
h −π6
18 a 65
b π5
c π6
d 12
e π10
f π3
g π8
h π3
19 a !32
b 12
c −!33
d −!22
e !32
f −1
20 a !779
b −!52
c −5!1111
d 5!8989
e !215
f 4!6565
21 a 2!1516
b −3!7 c 45
d 1213
e −4!623
f 1725
22 a 5665
b 6365
c −528697
d − 8121037
23 Check with your teacher.
24 Check with your teacher.
25 a Domain [0, 2], range [–π, π]
b Domain [1, 3], range [0, 3π]
c Domain R, range (–2, 2π)
d Domain [–3, 3], range c−5π2
, 5π2d
e Domain [–4, 4], range [0, 6π]
f Domain R, range a−7π2
, 7π2b
26 a Domain c0, 23d , range [0, 2π]
b Domain [2, 3], range [–π, 2π]
c Domain R, range (–3π, 2π)
d Domain c−12, 2 d , range [0, 4]
e Domain c−1, 113d , range [–4, 1]
f Domain R, range (–1, 7)
27 a Dilation by a factor of c units parallel to the x-axis (or away from the y-axis), dilation by a factor of b units parallel to the y-axis (or away from the x-axis), translation by a units up and parallel to the y-axis (or away from the x-axis)
Domain [–c, c], range ca − bπ2
, a + bπ2d
b Dilation by a factor of 1c units parallel to the x-axis
(or away from the y-axis), dilation by a factor of b units parallel to the y-axis (or away from the x-axis), translation by a units up and parallel to the y-axis (or away from the x-axis)
Domain c−1c,
1cd , range [a, a + bπ]
c Dilation by a factor of c units parallel to the x-axis (or away from the y-axis), dilation by a factor of b units parallel to the y-axis (or away from the x-axis), translation by a units up and parallel to the y-axis (or away from the x-axis)
Domain R, range aa − bπ2
, a + bπ2b
28 Check with your teacher.
ExErcisE 2.7Note that n ∈ Z.
1 π4
(8n ± 1)
2 π12
(12n ± 5)
3 π6
(12n + 1), π6
(12n + 5)
4 π6
(6n − 1), π3
(3n + 2)
5 π4
(4n + 1)
6 π6
(3n − 1)
7 π6
(6n ± 1), π3
(3n ± 1)
8 π12
(6n ± 1)
124 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 124 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

9 2nπ
3,
2π9
(3n + 1)
10 π2
(2n + 1), π3
(3n − 1)
11 π12
(12n + 1), π12
(12n + 5), π4
(4n + 1)
12 π6
(6n ± 1), π2
(2n ± 1)
13 π10
(4n + 1), π2
(4n − 1)
14 π14
(4n + 1), π2
(4n − 1)
15 a π18
(12n ± 1)
b π3
(3n ± 1)
c π8
(8n − 1), π8
(8n + 5)
d π18
(12n − 1), π18
(12n + 7)
16 a π6
(6n ± 1), π3
(3n ± 1)
b π8
(8n ± 1), π8
(8n + 3), π8
(8n + 5)
c π9
(6n ± 1), 2π9
(3n ± 1)
d π12
(8n ± 1), π12
(8n ± 3)
17 a π3
(3n − 1) b π18
(6n + 1)
c π6
(3n ± 1) d π12
(6n ± 1)
18 a nπ2
, π12
(12n − 1), π12
(12n + 7)
b π4
(4n ± 1), nπ
c π4
(4n ± 1), π12
(12n ± 5)
d nπ2
, π6
(6n + 1), π3
(3n + 1)
19 a π12
(12n − 1), π12
(12n + 7), π4
(4n − 1)
b π6
(6n ± 1), nπ
20 a π6
(4n + 1), π3
(2n + 1) b π4
(4n − 1), π12
(12n + 5)
21 a π3
(3n + 1), π2
(2n − 1)
b π36
(24n + 7), π36
(24n − 1)
22 a nπ3
b nπ2
23 a π3
(3n − 1), π4
(4n − 1) b π3
(3n − 1), π4
(4n + 1)
24 a nπ, π3
(6n ± 1) b 2nπ, 2nπ
3
25 a π2
(4n ± 1), π6
(12n − 1), π6
(12n + 7)
b nπ, π3
(6n ± 1)
26 a π4
(4n ± 1) b π4
(4n ± 1), π3
(3n ± 1)
ExErcisE 2.81
π– –2
234y
x
–2
−π−2π π–2
3π––2
π 2π0–1
–4–3
3π––2
–
1
2
π– –2
234y
x
–2
−π−2π π–2
3π––2
π 2π0–1
–4–3
3π––2
–
1
3
π– –2
234y
x
–2
−π−2π π–2
3π––2
π 2π0–1
–4–3
3π––2
–
1
4
π– –2
234y
x
–2
−π−2π π–2
3π––2
π 2π0–1
–4–3
3π––2
–
1
5
468y
x
–4
π– –2
−π−2π π–2
3π––2
π 2π0–2
–8–6
3π––2
–
2
6
π– –3
468y
x
–4
−π−2π π–3
4π––3
5π––3
2π––3
π 2π0–2
–8–6
5π––3
– 4π––3
– 2π––3
–
2
Topic 2 TrIgonoMeTry 125
c02Trigonometry.indd 125 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

7
π– –2
234y
x
–2
−π π–2
π–4
5π––4
3π––4
3π––2
7π––4
π 2π0–1
–4–3
1
3π––4
–π– –4
8
234y
x
–2
π–2
π–4
5π––4
3π––4
3π––2
7π––4
π 2π0–1
–4–3
1
π– –2
−π 3π––4
–π– –4
9
234y
x
–2
−π π–2
π0–1
–4–3
1
π– –2
10
2345y
x
–2
−π π–2
3π––2
3π––2
π0–1
–3
1
−π– –2
11
π– –2
468y
x
–4
−π−3π −2π π–2
5π––2
3π––2
π 2π 3π0–2
–8–6
5π––2
– 3π––2
–
2
12
34
21
–1–2–3
y
x0 π–2
3π–2
2π
–4
π
13
34
21
–1–2–3
y
x0 π–2
3π–2
2π
–4
π
14
π– –2
468y
x
–4
−π−2π π–2
3π––2
π 2π0–2
–8–6
3π––2
–
2
15
34
21
–1–2–3
y
x0π–2
– π–2
3π–2
– 3π–2
–π π 2π–2π
–4
16
68
42
–2–4–6
y
x0π–4
– π–4
π–2
– π–2
3π–4
– 3π–4
–π π
–8
17
68
42
–2–4–6
y
x0π–4
– π–4
π–2
– π–2
3π–4
– 3π–4
–π π
–8
18
68
42
–2–4–6
y
x0π–4
– π–4
π–2
– π–2
3π–4
– 3π–4
–π π
–8
126 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 126 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

19 See figure at foot of page.*
20 a
π–2
– π–2
3π–2
– 3π–2
68
101214
42
–2–4
y
x0–2π –π 2ππ
b
68
101214
42
–2–4
y
x0π–2
– π–2
3π–2
– 3π–2
–2π –π 2ππ
ExErcisE 2.91
1 2 3 4 5–3–4–5 –1–2
y
x0
π–2
–π–2
π
2
1 2 3 4 5–3–4–5 –1–2
y
x0
π–2
–π–2
π
3
1 2 3 4 5–3–4–5 –1–2
y
x0
π–2
–π–2
π
–π
4
1 2 3 4 5 6 7 8–3–4–5–6–7 –1–2
y
x0
π–2
–π–2
π
–π
5
–π
1 2 3 4 5–3–4–5 –1–2
y
x0
π–2
–π–2
π
6
1 2 3 4 5–3–4–5 –1–2
y
x0
π–2
3π–2
–π–2
π
2π
7
1 2 3 4 5–3–4–5 –1–2
y
x0
π–2
3π–4
–π–2
π
8
1 2 3 4 5–3–4–5 –1–2
y
x0
π–2
3π–4
–π–2
π
*19
68
42
–2–4–6
y
x0π–2
– π–2
3π–2
–5π–2
– 3π–2
5π–2
–2π–3π –π 2ππ 3π
–8
Topic 2 TrIgonoMeTry 127
c02Trigonometry.indd 127 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

9
–π
1 2 3 4 5–3–4–5 –1–2
y
x0
π–2
–π–2
π
10
–π
1 2 3 4 5 6 7–3–4–5–6–7 –1–2
y
x0
π–2
–π–2
– 3π–2
π
11
–π
0.25 0.5 0.75–0.25–0.5–0.75
y
x0
π–2
–π–2
– 3π–2
π
12
–π
1 2 3 4 5 6 7–3–4–5–6–7 –1–2
y
x0
π–2
–π–2
– 3π–2
π
13
–π
y
x0
π–2
3π–2
–π–2
– 3π–2
π
0.5 1 1.5–0.5–1–1.5
14 y
x0
π–2
–π–2
π
–1 1 2 3 4–2–3–4
15
1 2 3 4 5–3–4–5 –1–2
y
x0
π–2
3π–2
5π–2
–π–2
π
2π
3π
16
–π
1 2 3 4 5 6 7–3–4–5–6–7 –1–2
y
x0
π–2
–π–2
– 3π–2
π
17
–π
2 4 6 8 10–6–8–10 –2–4
y
x0
π–2
–π–2
– 3π–2
π
18
0.5 1 1.5 2 2.5–0.5
–0.5
0.5
–1
y
x0
1
1.5
2
128 MaTHs QuesT 12 sPeCIaLIsT MaTHeMaTICs VCe units 3 and 4
c02Trigonometry.indd 128 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS

19 a
34
21
–1–2–3
y
x0π–2
– π–2
3π–2
– 3π–2
–π π
–4
b [0, π]/ eπ2f
c
1 2 3 4 5 6 7 8–3–4–5–6–7–8 –1–2
y
x0
π–2
3π–2
–π–2
π
–π
2π
20 21
–1–2–3–4–5–6
1 2 6 7543–5–6–7 –1–2–4 –3 0
y
x
Topic 2 TrIgonoMeTry 129
c02Trigonometry.indd 129 20/08/15 10:44 AM
UNCORRECTED PAGE P
ROOFS





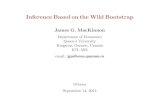

![the law of large numbers & the CLT€¦ · strong law of large numbers i.i.d. (independent, identically distributed) random vars X 1, X 2, X 3, … X i has μ = E[X i] < ∞ Strong](https://static.fdocument.org/doc/165x107/5f89d20554e5db51a8543e6c/the-law-of-large-numbers-the-clt-strong-law-of-large-numbers-iid-independent.jpg)


![University of Strathclyde · Web viewSymmetry operation to generate equivalent atoms denoted ´: x+1/2, -y+2, z. Selected bond lengths [Å] and angles [º]: K1-Centroid1 2.7943(8);](https://static.fdocument.org/doc/165x107/6128a11f7878bd76f811cffe/university-of-strathclyde-web-view-symmetry-operation-to-generate-equivalent-atoms.jpg)

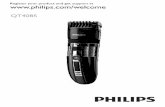

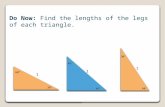


![University of Strathclyde · Web viewThe symmetry operation used to generate equivalent atoms denoted with ´ is -x+2,-y+1,-z+1. Selected bond lengths [Å] and angles [º]: Li1-N1](https://static.fdocument.org/doc/165x107/6128a11e7878bd76f811cffb/university-of-strathclyde-web-view-the-symmetry-operation-used-to-generate-equivalent.jpg)