
Transformadas ortogonais e processamento de sinais não...
31
Transformadas ortogonais e processamento de sinais não estacionários
Transcript of Transformadas ortogonais e processamento de sinais não...
Transformadas ortogonais e processamento de sinais não
estacionários
Transformações ortogonais
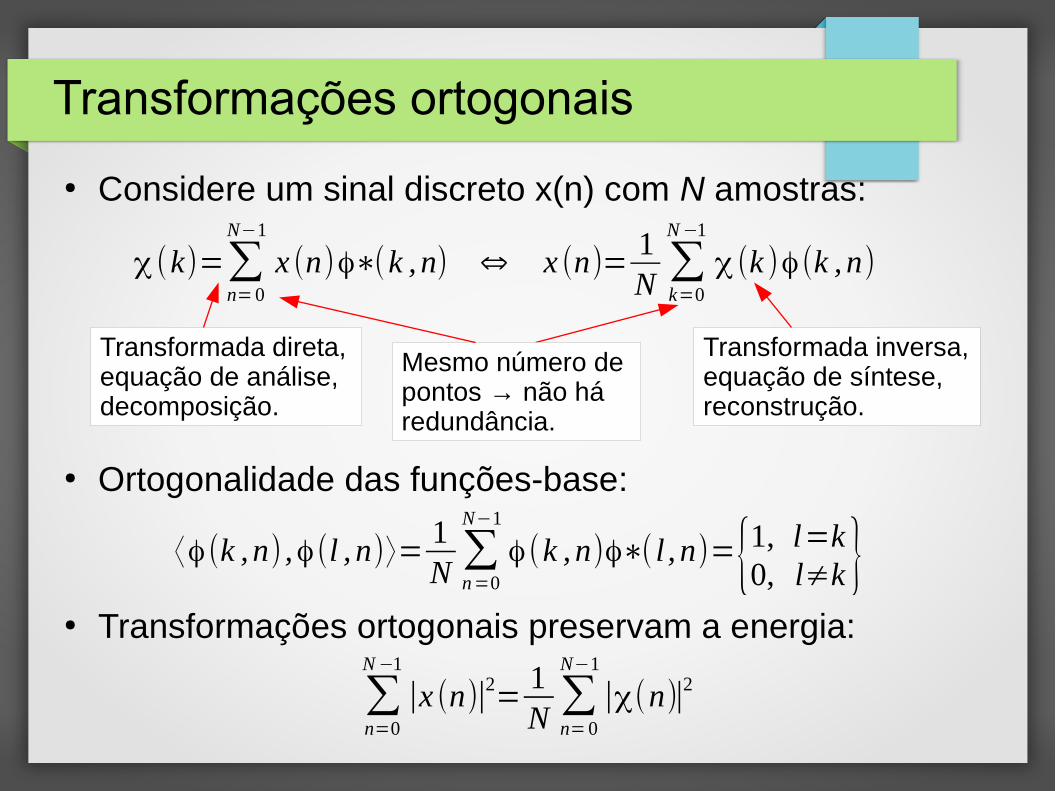
● Considere um sinal discreto x(n) com N amostras:
χ (k)=∑n=0
N−1
x (n)ϕ∗(k , n) ⇔ x (n)= 1N∑k=0
N−1
χ (k )ϕ(k , n)
Transformada direta, equação de análise,decomposição.
Transformada inversa, equação de síntese,reconstrução.
Mesmo número de pontos → não há redundância.
● Ortogonalidade das funções-base:
⟨ϕ(k ,n) ,ϕ(l , n)⟩= 1N∑n=0
N−1
ϕ(k ,n)ϕ∗( l , n)={1, l=k0, l≠k}
● Transformações ortogonais preservam a energia:
∑n=0
N−1
|x (n)|2= 1N∑n=0
N−1
|χ(n)|2
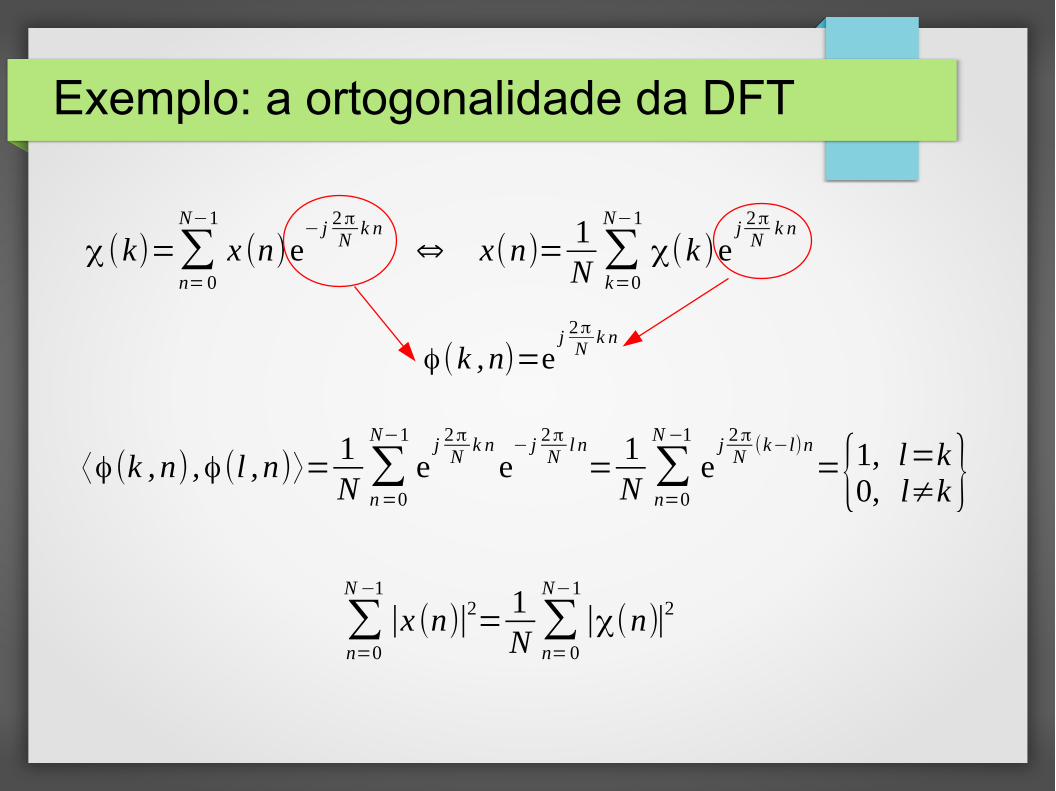
Exemplo: a ortogonalidade da DFT
ϕ(k , n)=ej 2πNk n
χ (k)=∑n= 0
N−1
x (n)e− j 2π
Nk n
⇔ x(n)= 1N∑k=0
N−1
χ(k )ej 2πNk n
⟨ϕ(k , n) ,ϕ(l , n)⟩= 1N∑n=0
N−1
ej 2πNk n
e− j 2π
Nln= 1N∑n=0
N−1
ej 2πN
(k−l)n={1, l=k
0, l≠k}
∑n=0
N−1
|x (n)|2= 1N∑n= 0
N−1
|χ(n)|2
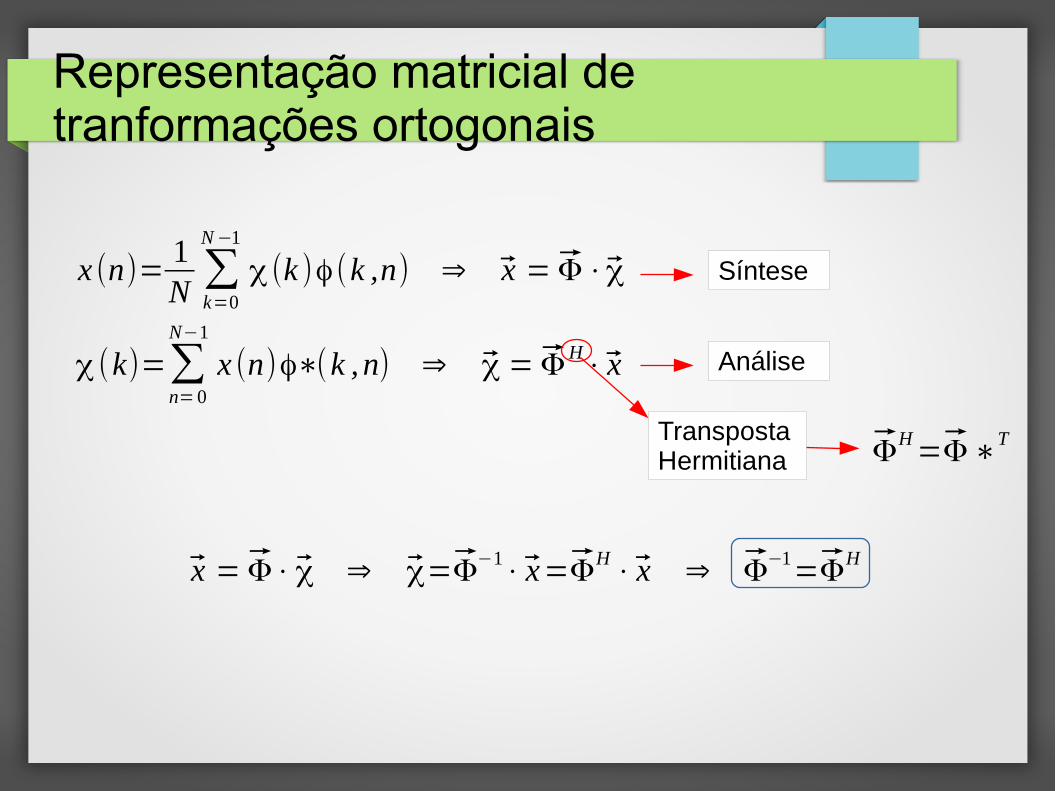
Representação matricial de tranformações ortogonais
χ (k)=∑n= 0
N−1
x (n)ϕ∗(k ,n) ⇒ χ⃗ = Φ⃗H⋅ x⃗
x (n)= 1N∑k=0
N−1
χ (k )ϕ(k ,n) ⇒ x⃗ = Φ⃗⋅χ⃗ Síntese
Análise
Transposta Hermitiana Φ⃗H=Φ⃗∗T
x⃗ = Φ⃗⋅χ⃗ ⇒ χ⃗=Φ⃗−1⋅ x⃗=Φ⃗H⋅ x⃗ ⇒ Φ⃗−1=Φ⃗H
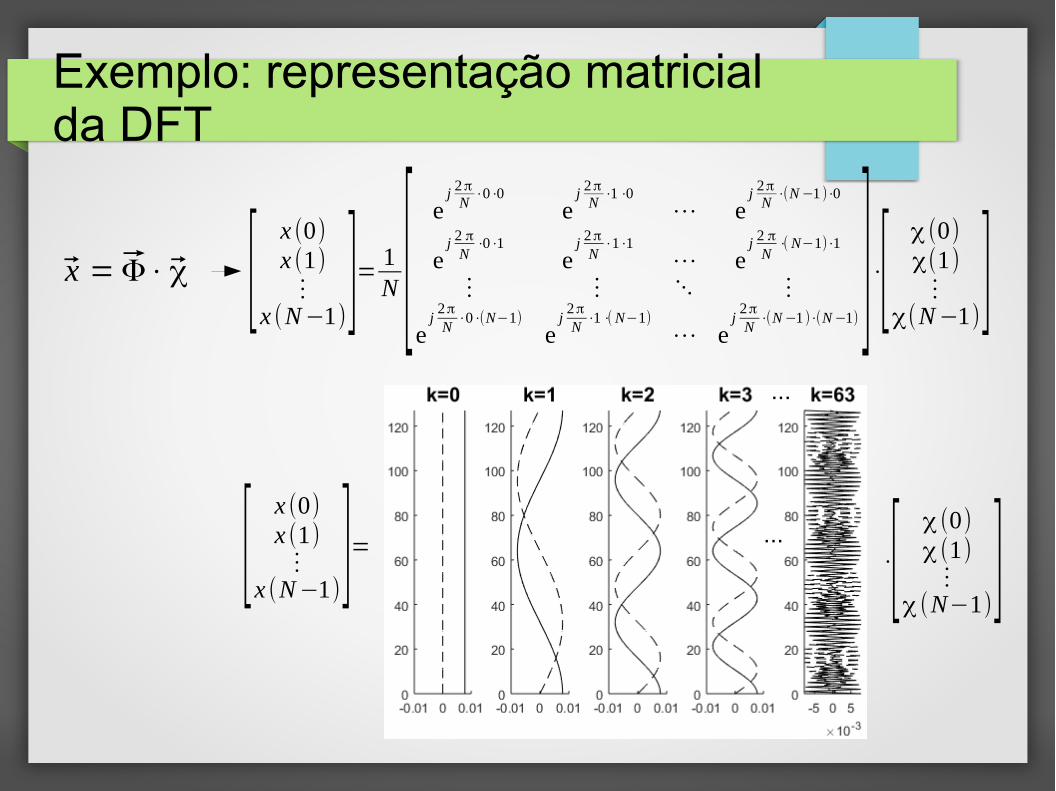
Exemplo: representação matricial da DFT
x⃗ = Φ⃗⋅χ⃗ [ x (0)x (1)⋮
x (N−1)]= 1N [ e
j 2πN⋅0⋅0
ej 2πN⋅1⋅0
⋯ ej 2πN⋅(N−1 )⋅0
ej 2 πN
⋅0⋅1ej 2πN⋅1⋅1
⋯ ej 2 πN
⋅(N−1)⋅1
⋮ ⋮ ⋱ ⋮
ej
2πN⋅0⋅(N−1)
ej
2πN⋅1⋅(N−1)
⋯ ej
2πN⋅(N−1 )⋅(N−1)]⋅[ χ (0)
χ(1)⋮
χ(N−1)]
⋅[ χ (0)χ (1)⋮
χ (N−1)]
...
...[ x (0)x (1)⋮
x (N−1)]=
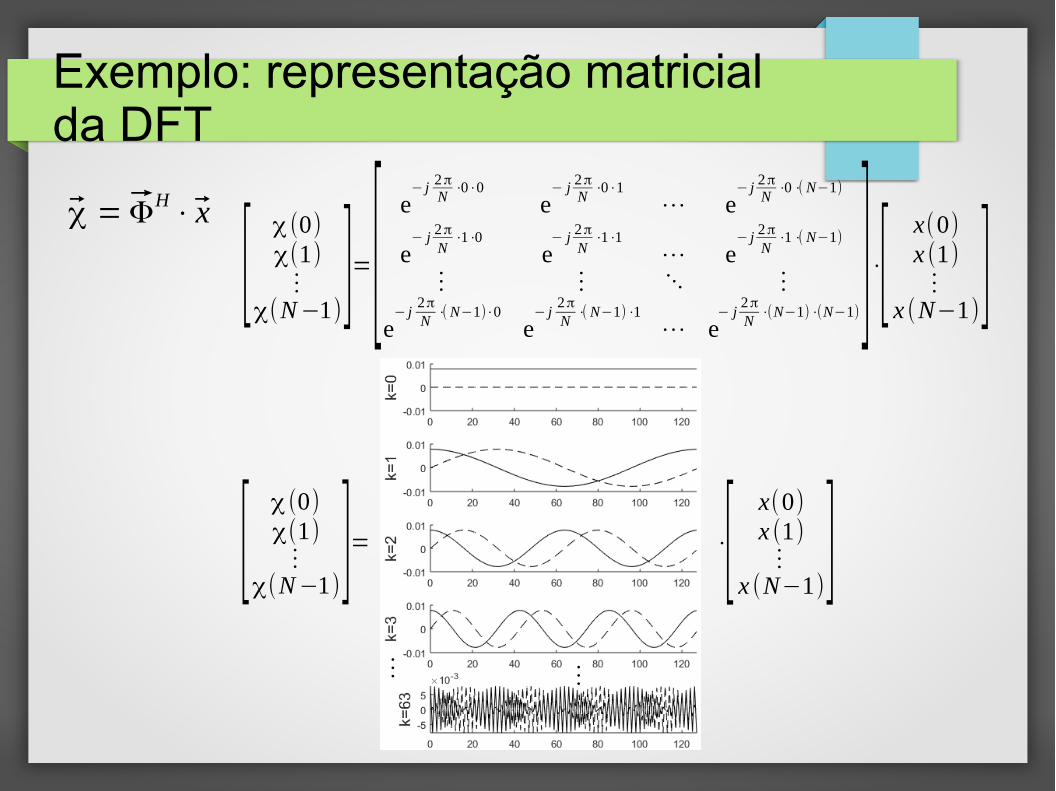
Exemplo: representação matricial da DFT
[ χ (0)χ(1)⋮
χ(N−1)]=[ e− j 2π
N⋅0⋅0
e− j 2π
N⋅0⋅1
⋯ e− j 2π
N⋅0⋅(N−1)
e− j 2π
N⋅1⋅0
e− j 2π
N⋅1⋅1
⋯ e− j 2π
N⋅1⋅(N−1)
⋮ ⋮ ⋱ ⋮
e− j
2πN
⋅(N−1)⋅0e− j
2πN
⋅(N−1)⋅1⋯ e
− j2πN
⋅(N−1)⋅(N−1)]⋅[ x(0)x (1)⋮
x (N−1)]χ⃗ = Φ⃗H⋅ x⃗
[ χ (0)χ(1)⋮
χ(N−1)]= ⋅[ x(0)x (1)⋮
x (N−1)]⋮ ⋮
Outras transformadas ortogonais
● A transformada de Fourier possui algumas “desvantagens”:
– Se x(n) é real → coeficientes da DFT são complexos.– Dos N coeficientes, N/2 são conjugados complexos →
informação redundante.● Existem outras transformações ortogonais que:
– Oferecem resultados reais.– Não possuem redundância.– Oferecem características atrativas para determinadas
aplicações.
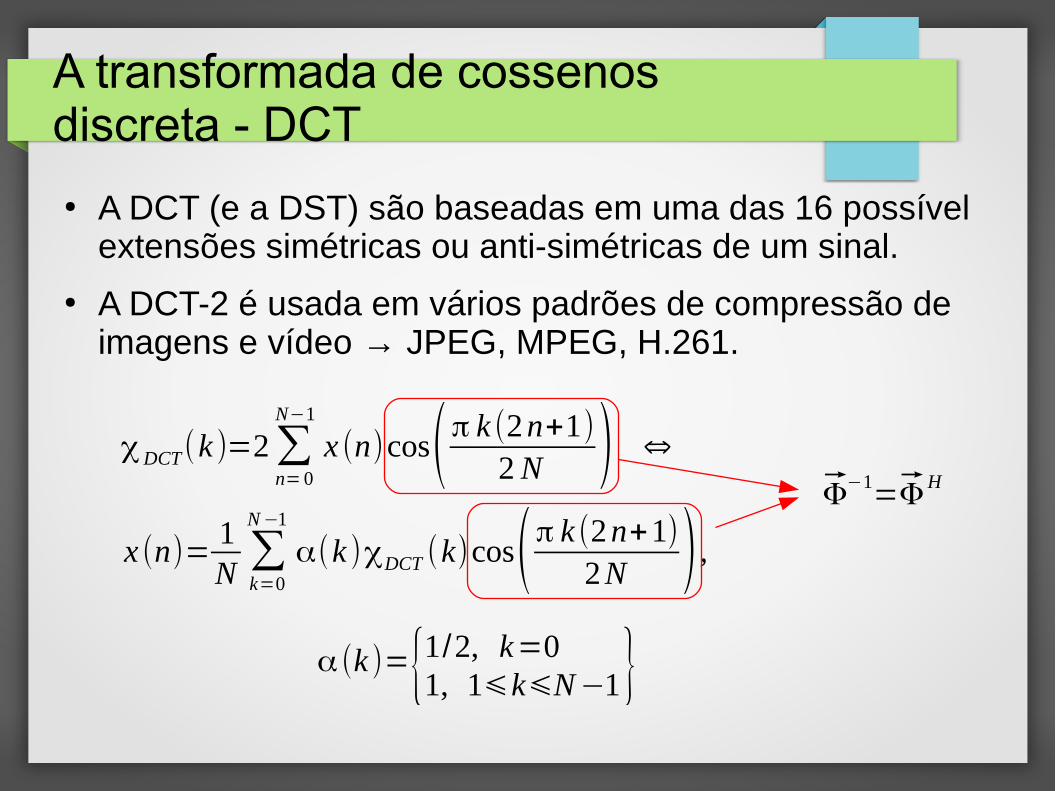
A transformada de cossenos discreta - DCT
● A DCT (e a DST) são baseadas em uma das 16 possível extensões simétricas ou anti-simétricas de um sinal.
● A DCT-2 é usada em vários padrões de compressão de imagens e vídeo → JPEG, MPEG, H.261.
χ DCT(k )=2∑n= 0
N−1
x (n)cos(π k (2n+1)2N ) ⇔
x (n)= 1N∑k=0
N−1
α(k )χDCT (k)cos(π k (2n+1)2N ),
α(k )={1/2, k=01, 1⩽k⩽N−1}
Φ⃗−1=Φ⃗H
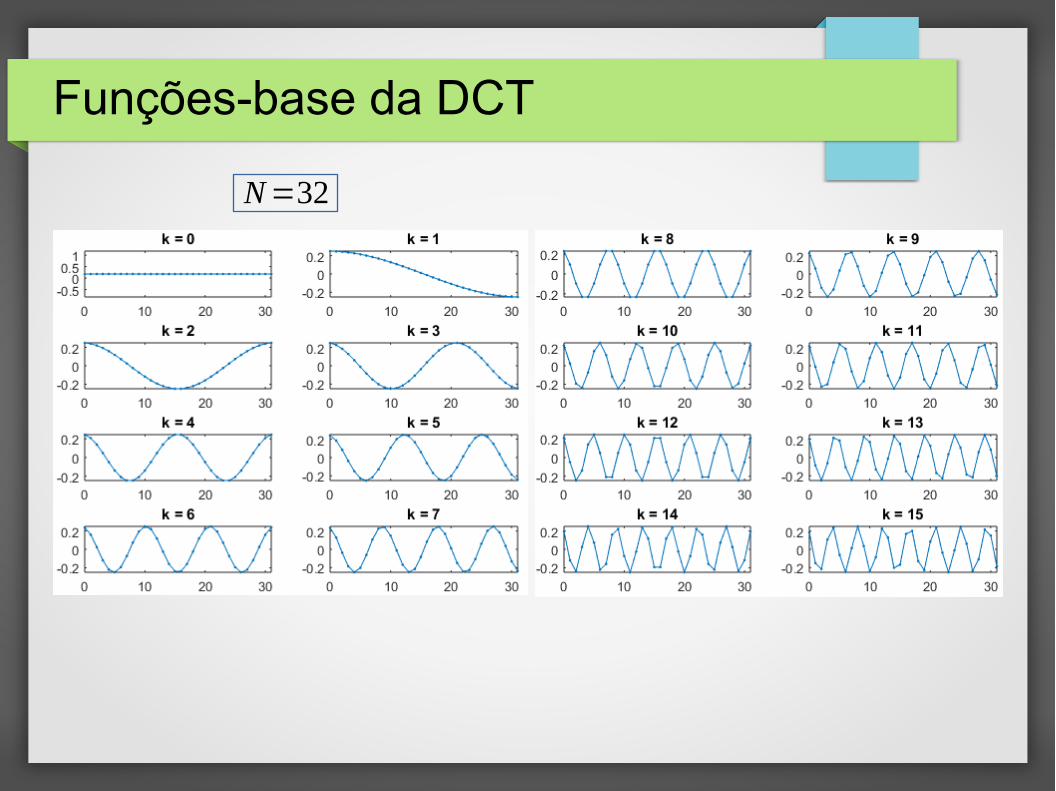
Funções-base da DCT
N=32
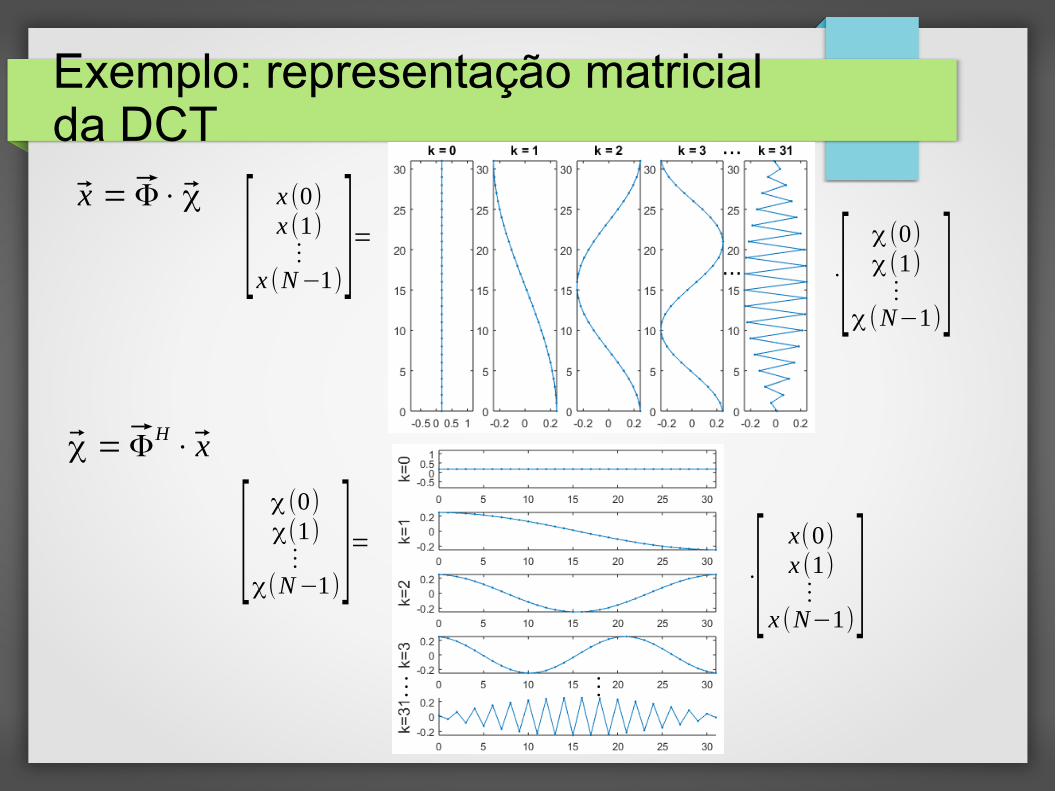
Exemplo: representação matricial da DCTx⃗ = Φ⃗⋅χ⃗
χ⃗ = Φ⃗H⋅ x⃗
⋅[ χ (0)χ (1)⋮
χ (N−1)][ x (0)x (1)⋮
x (N−1)]=
[ χ (0)χ(1)⋮
χ(N−1)]= ⋅[ x(0)x (1)⋮
x (N−1)]
...
...
⋮ ⋮
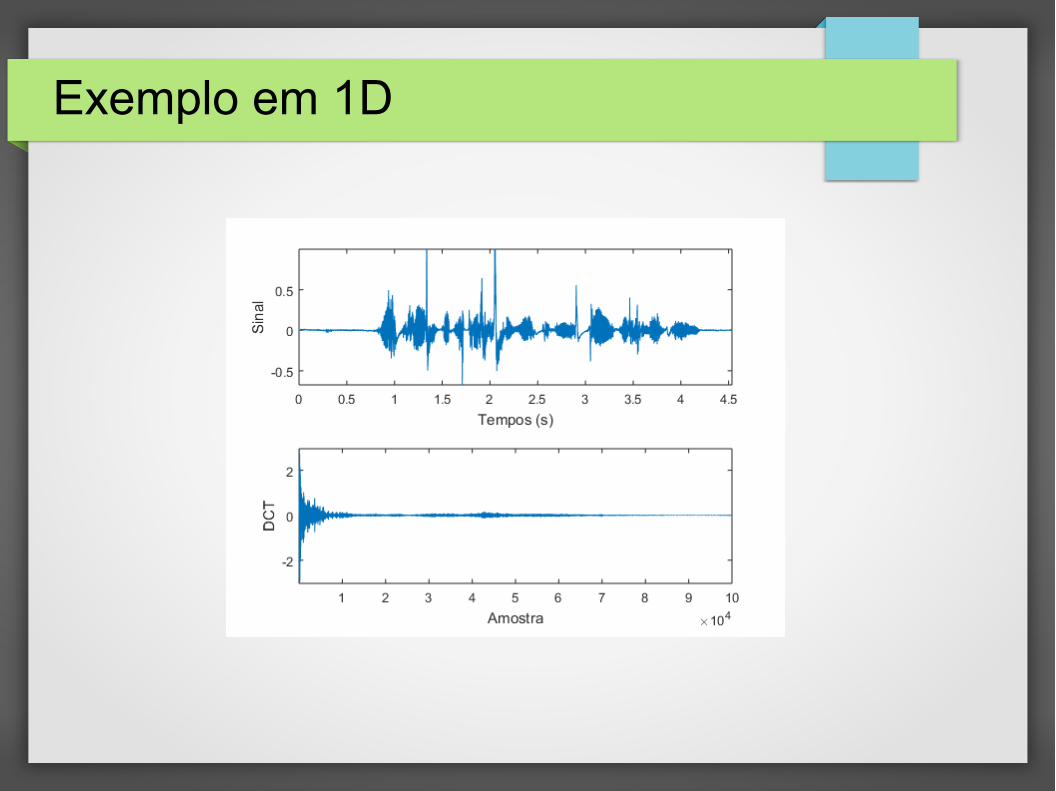
Exemplo em 1D
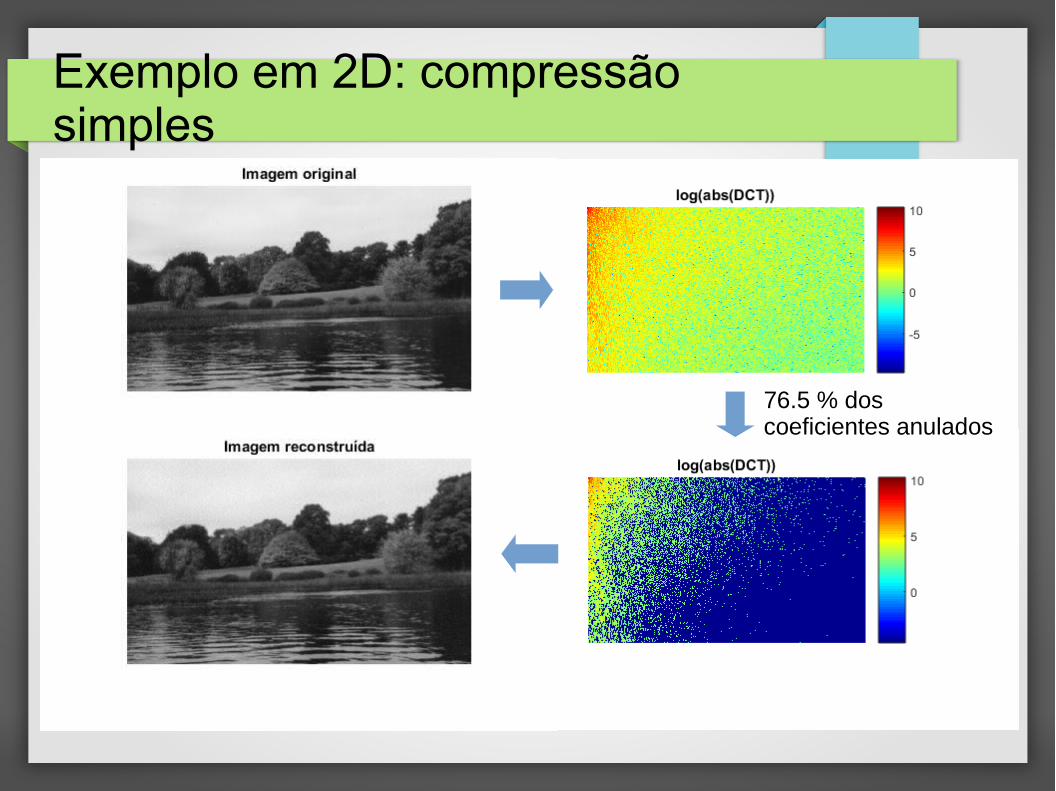
Exemplo em 2D: compressão simples
76.5 % dos coeficientes anulados
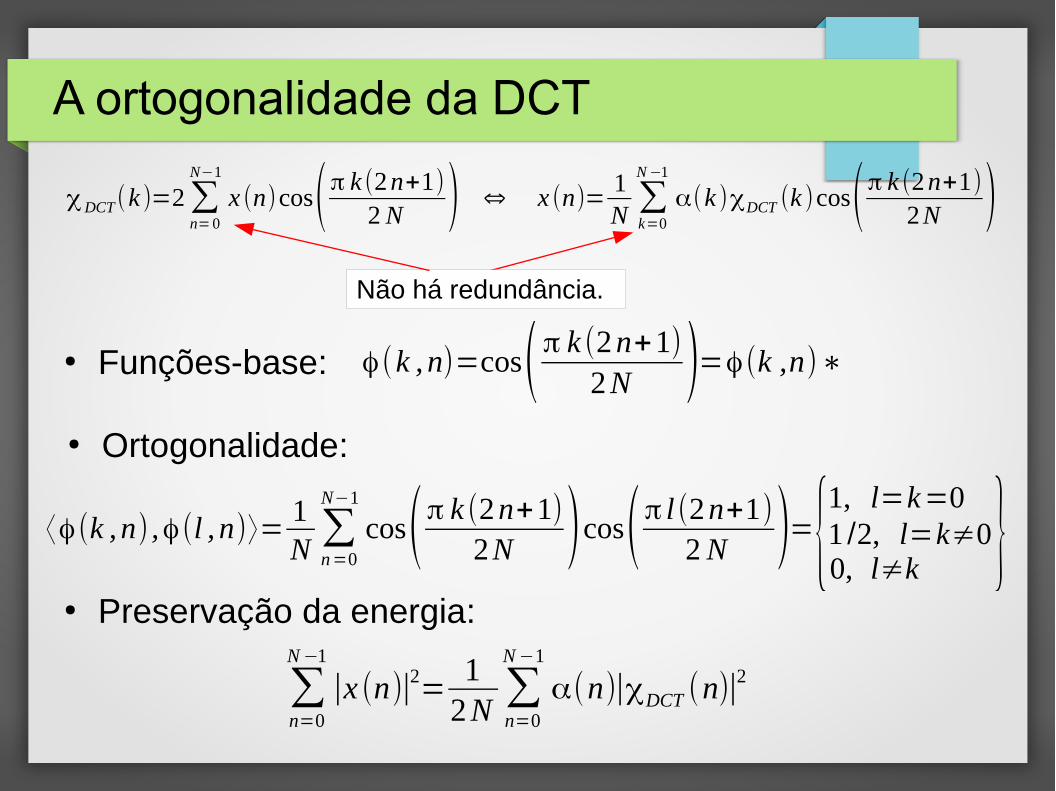
A ortogonalidade da DCT
⟨ϕ(k ,n) ,ϕ(l , n)⟩= 1N∑n=0
N−1
cos(π k (2n+1)2N )cos(π l (2n+1)
2N )={1, l=k=01 /2, l=k≠00, l≠k }
∑n=0
N−1
|x (n)|2= 12N
∑n=0
N−1
α(n)|χDCT (n)|2
ϕ(k , n)=cos(π k (2n+1)2N )=ϕ(k ,n)∗● Funções-base:
● Ortogonalidade:
● Preservação da energia:
χ DCT(k )=2∑n=0
N−1
x (n)cos(π k (2n+1)2N ) ⇔ x (n)= 1
N∑k=0
N−1
α(k )χDCT (k )cos(π k (2n+1)2N )
Não há redundância.
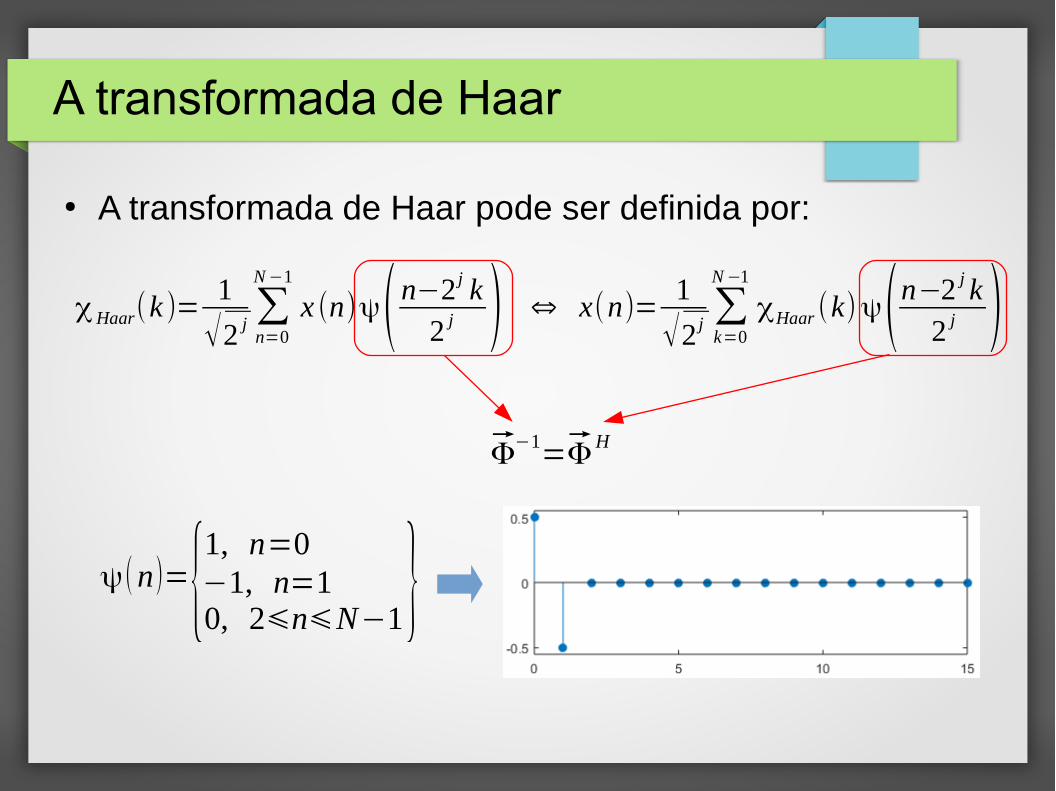
A transformada de Haar
● A transformada de Haar pode ser definida por:
χ Haar(k )=1
√2 j∑n=0
N−1
x (n)ψ(n−2 j k2 j ) ⇔ x(n)= 1
√2 j∑k=0
N−1
χHaar (k) ψ(n−2 j k2 j )
ψ(n)={1, n=0−1, n=10, 2⩽n⩽N−1}
Φ⃗−1=Φ⃗H
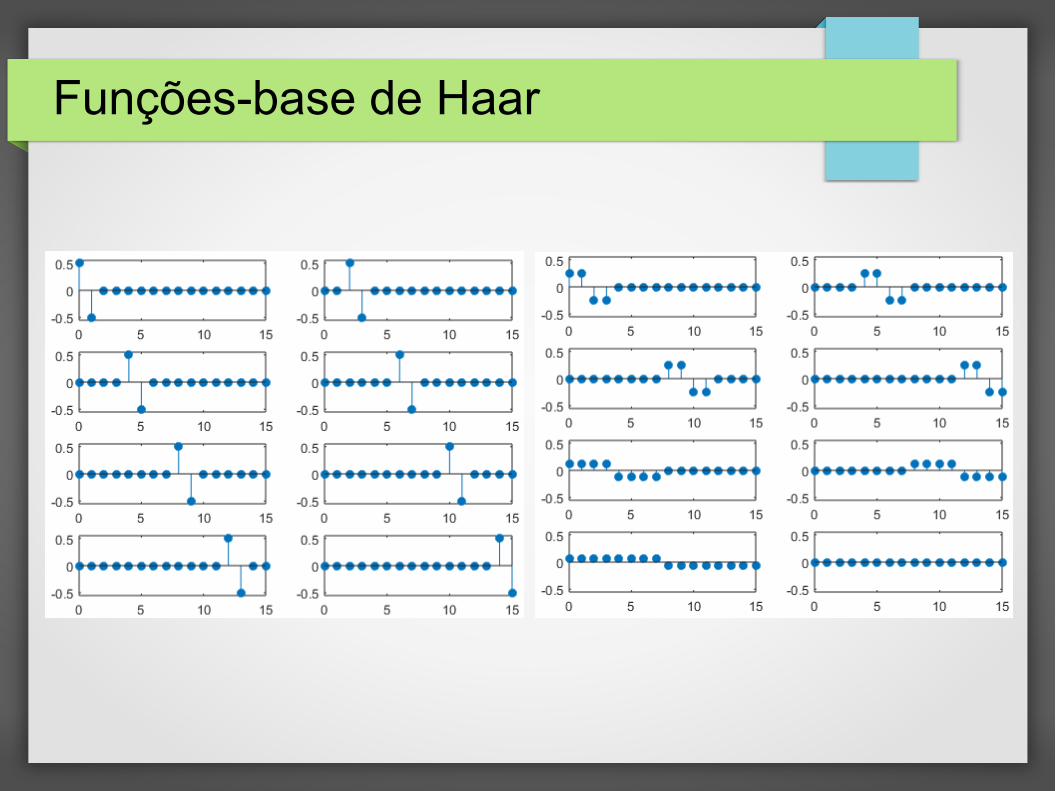
Funções-base de Haar
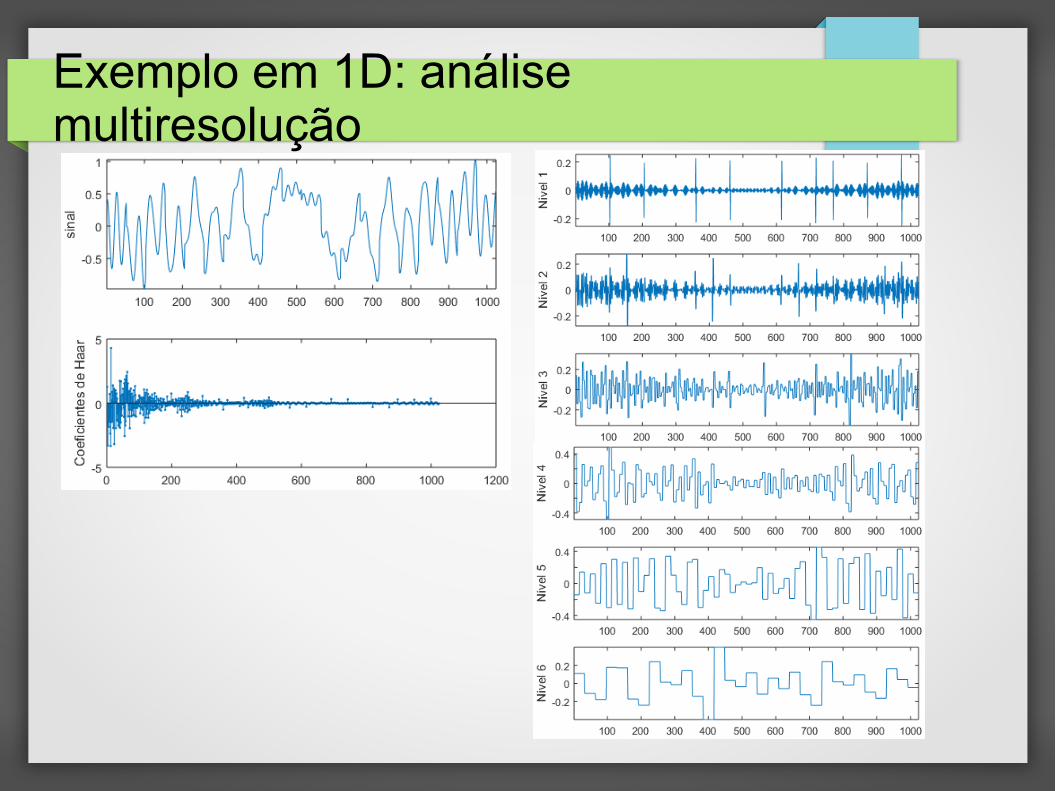
Exemplo em 1D: análise multiresolução
A ortogonalidade de Haar
⋮ ⋮
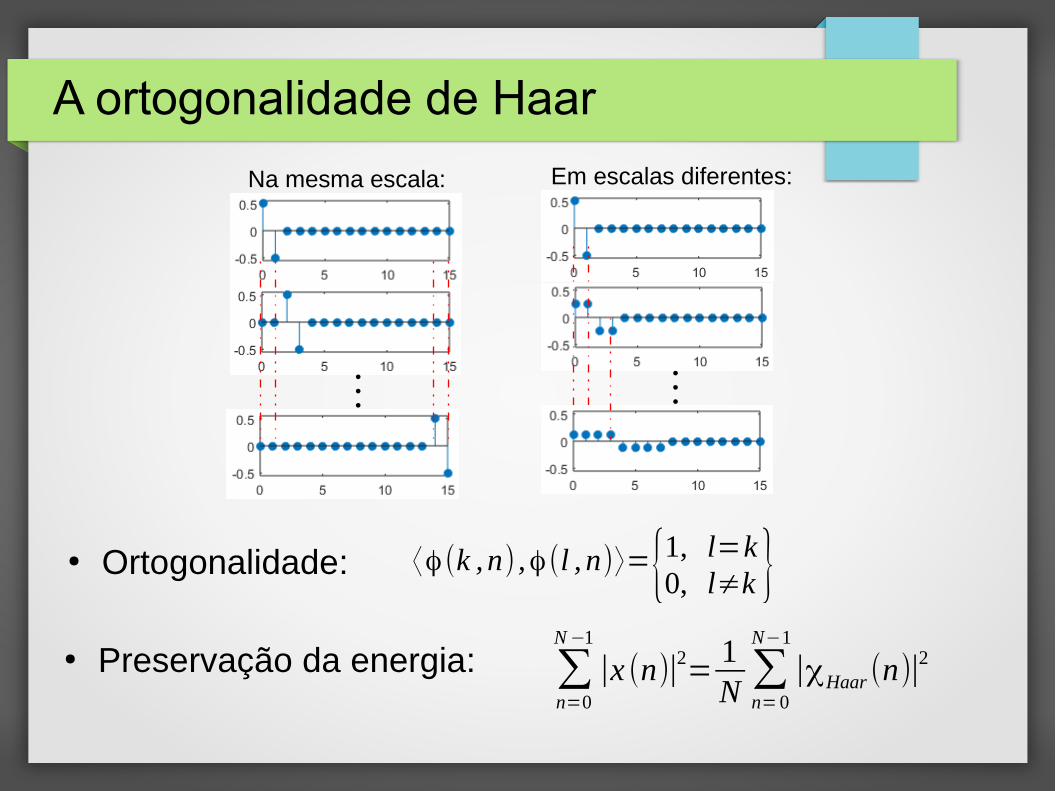
Na mesma escala: Em escalas diferentes:
⟨ϕ(k ,n) ,ϕ(l , n)⟩={1, l=k0, l≠k }
∑n=0
N−1
|x (n)|2= 1N∑n=0
N−1
|χHaar (n)|2
● Ortogonalidade:
● Preservação da energia:
Sinais não estacionários
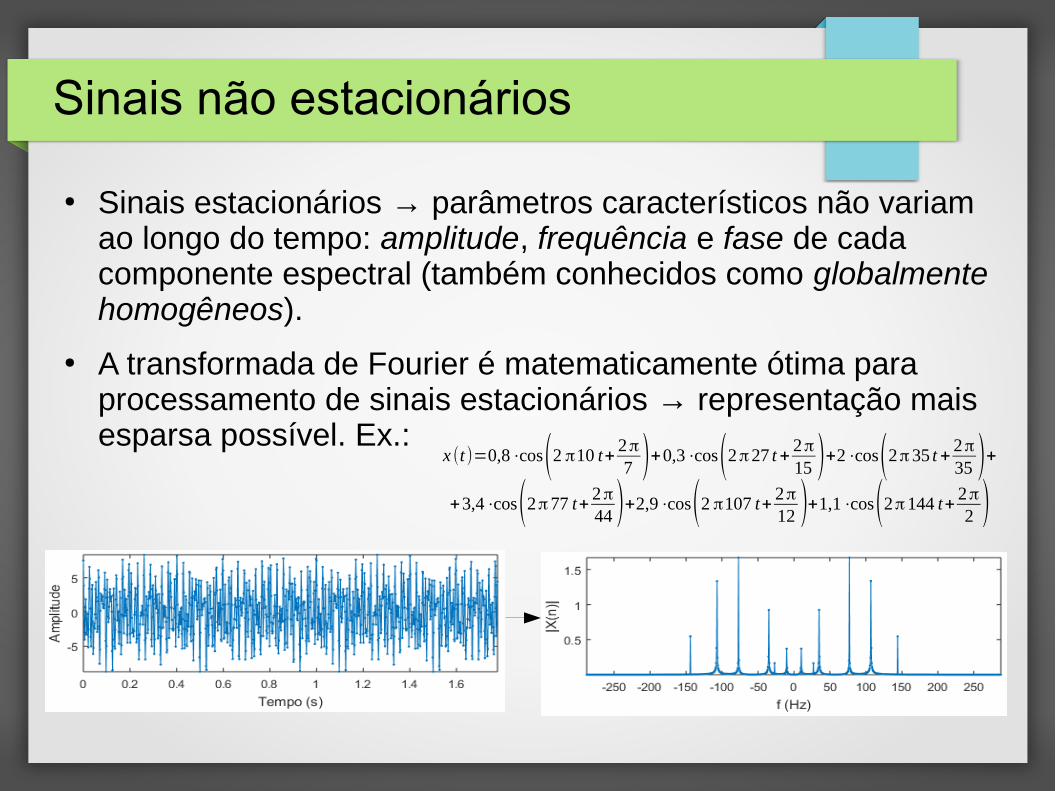
● Sinais estacionários → parâmetros característicos não variam ao longo do tempo: amplitude, frequência e fase de cada componente espectral (também conhecidos como globalmente homogêneos).
● A transformada de Fourier é matematicamente ótima para processamento de sinais estacionários → representação mais esparsa possível. Ex.:
x (t)=0,8⋅cos(2 π10 t+ 2π7 )+0,3⋅cos(2π27 t+ 2π
15 )+2⋅cos(2π35 t+ 2π35 )+
+3,4⋅cos(2π77 t+ 2π44 )+2,9⋅cos(2 π107 t+ 2π
12 )+1,1⋅cos(2π144 t+ 2π2 )
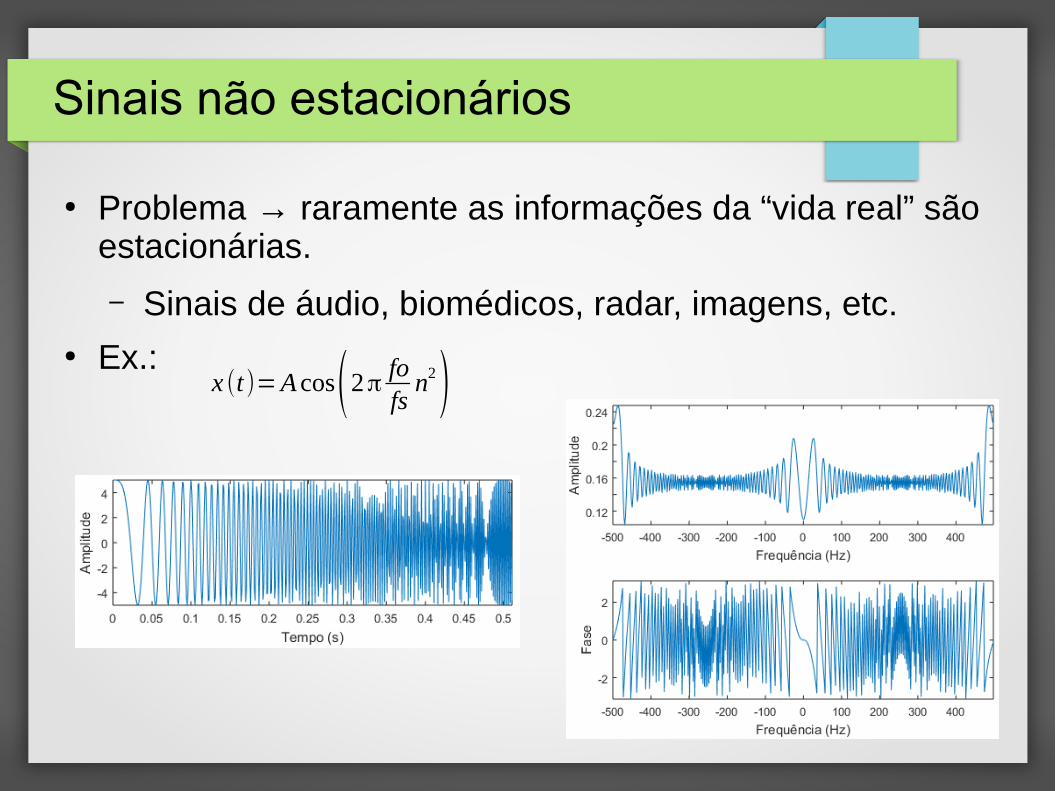
Sinais não estacionários
● Problema → raramente as informações da “vida real” são estacionárias.
– Sinais de áudio, biomédicos, radar, imagens, etc.● Ex.:
x (t)=A cos(2π fofsn2)
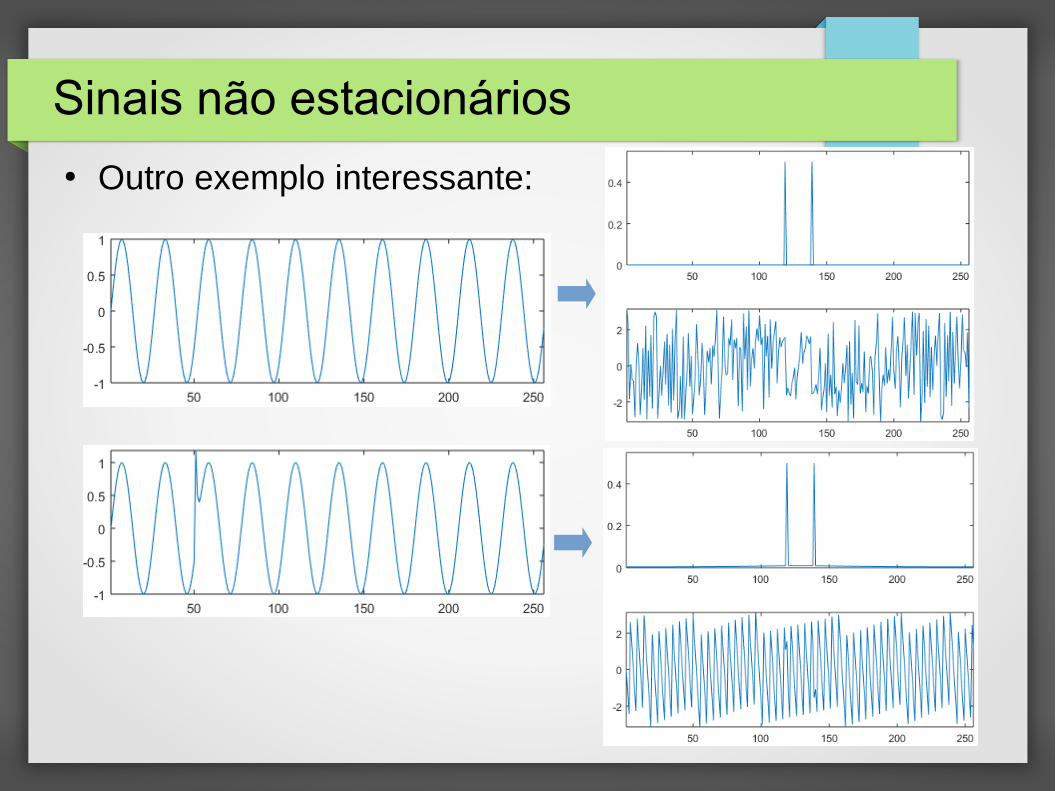
Sinais não estacionários● Outro exemplo interessante:
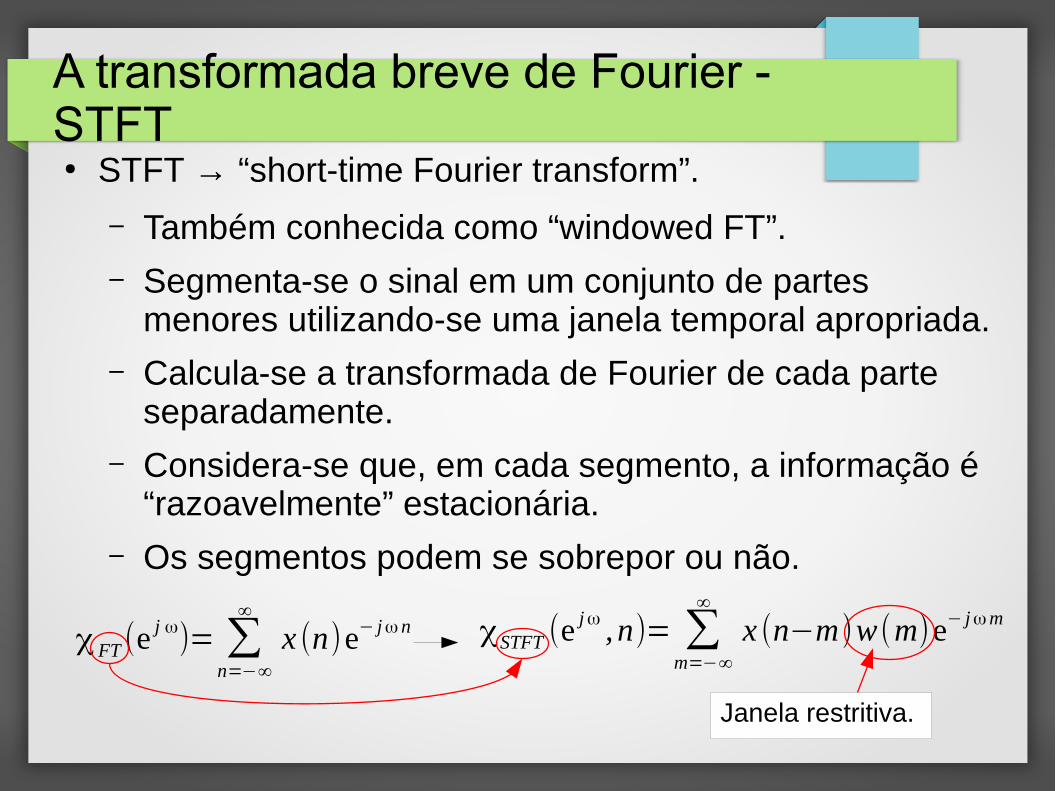
A transformada breve de Fourier - STFT● STFT → “short-time Fourier transform”.
– Também conhecida como “windowed FT”.– Segmenta-se o sinal em um conjunto de partes
menores utilizando-se uma janela temporal apropriada.– Calcula-se a transformada de Fourier de cada parte
separadamente.– Considera-se que, em cada segmento, a informação é
“razoavelmente” estacionária.– Os segmentos podem se sobrepor ou não.
χ FT (ej ω)= ∑
n=−∞
∞
x (n)e− jω n χSTFT (ejω , n)= ∑
m=−∞
∞
x (n−m)w(m)e− jωm
Janela restritiva.
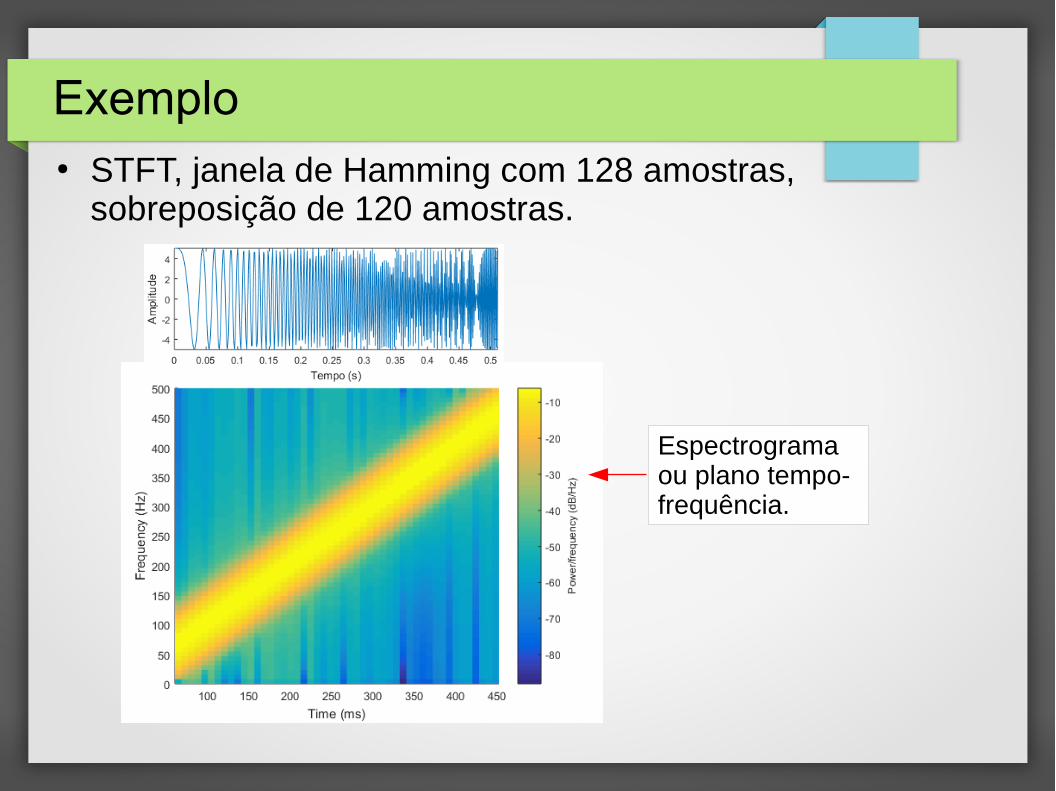
Exemplo● STFT, janela de Hamming com 128 amostras,
sobreposição de 120 amostras.
Espectrograma ou plano tempo-frequência.
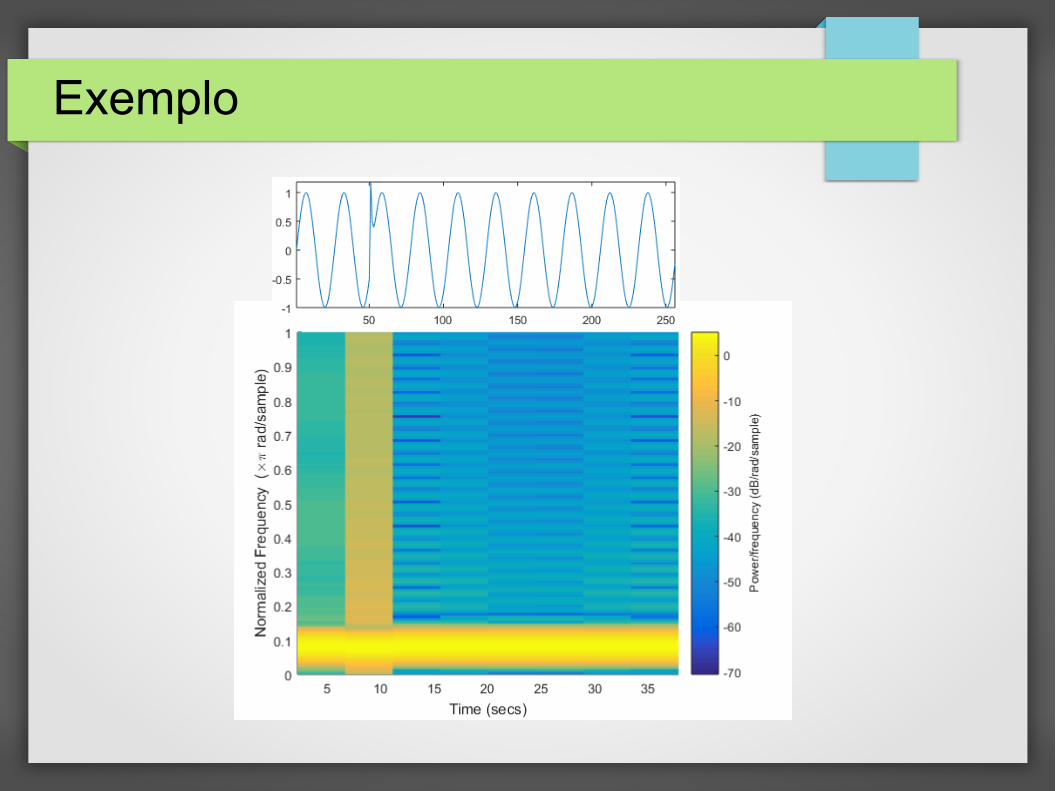
Exemplo
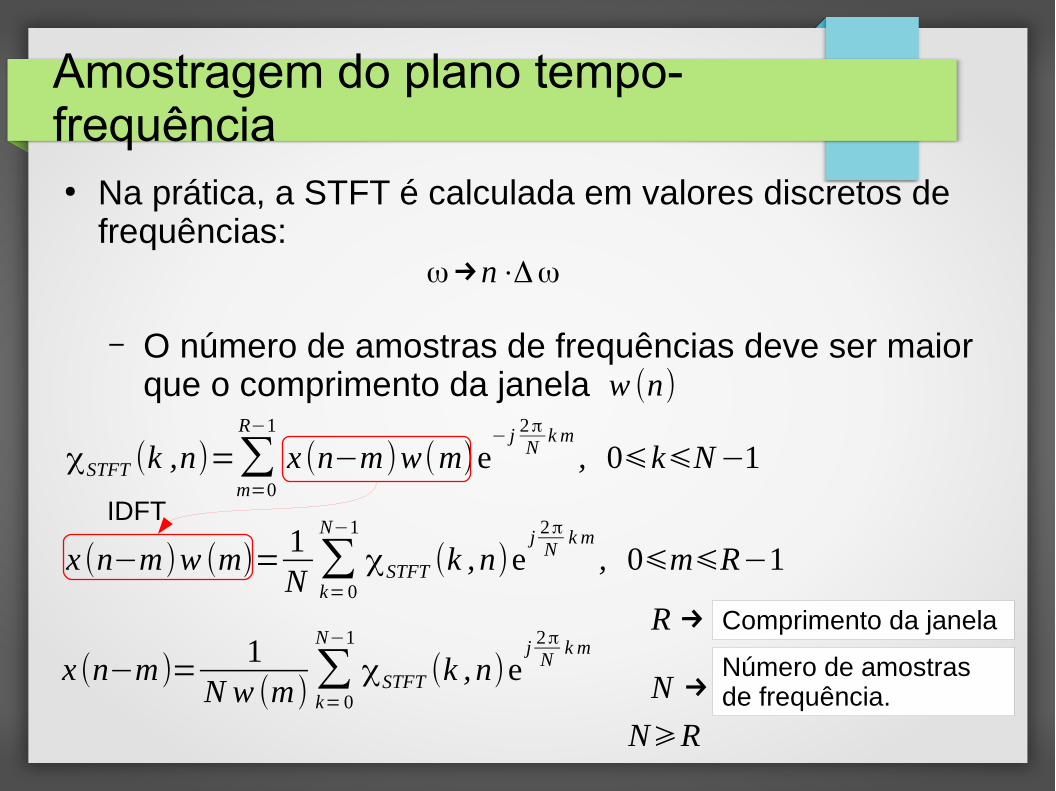
Amostragem do plano tempo-frequência● Na prática, a STFT é calculada em valores discretos de
frequências:
– O número de amostras de frequências deve ser maior que o comprimento da janela
ω→n⋅Δω
w (n)
χSTFT (k ,n)=∑m=0
R−1
x (n−m)w(m)e− j 2π
Nkm, 0⩽k⩽N−1
R → Comprimento da janela
N →Número de amostras de frequência.
N⩾R
x (n−m)w (m)= 1N∑k= 0
N−1
χSTFT (k ,n)ej 2πNkm, 0⩽m⩽R−1
IDFT
x (n−m)= 1N w (m)∑k= 0
N−1
χSTFT (k ,n)ej 2πNkm
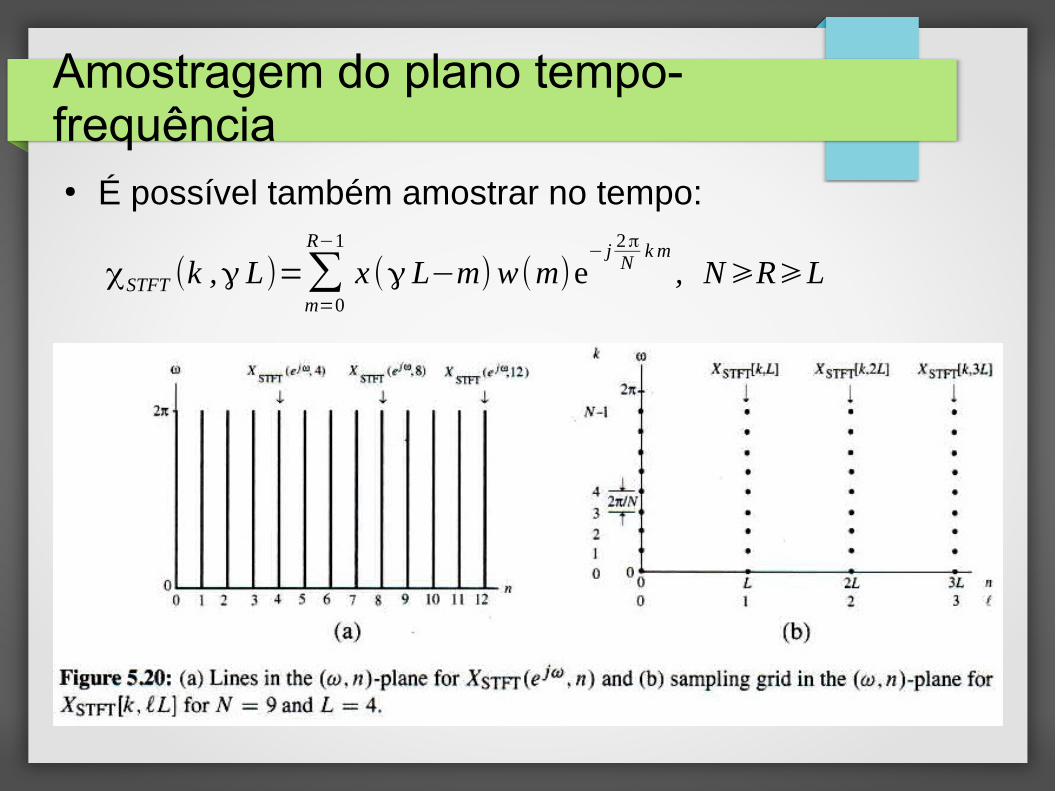
Amostragem do plano tempo-frequência● É possível também amostrar no tempo:
χSTFT (k ,γ L)=∑m=0
R−1
x (γ L−m)w(m)e− j 2π
Nkm, N⩾R⩾L
Resolução tempo-frequência
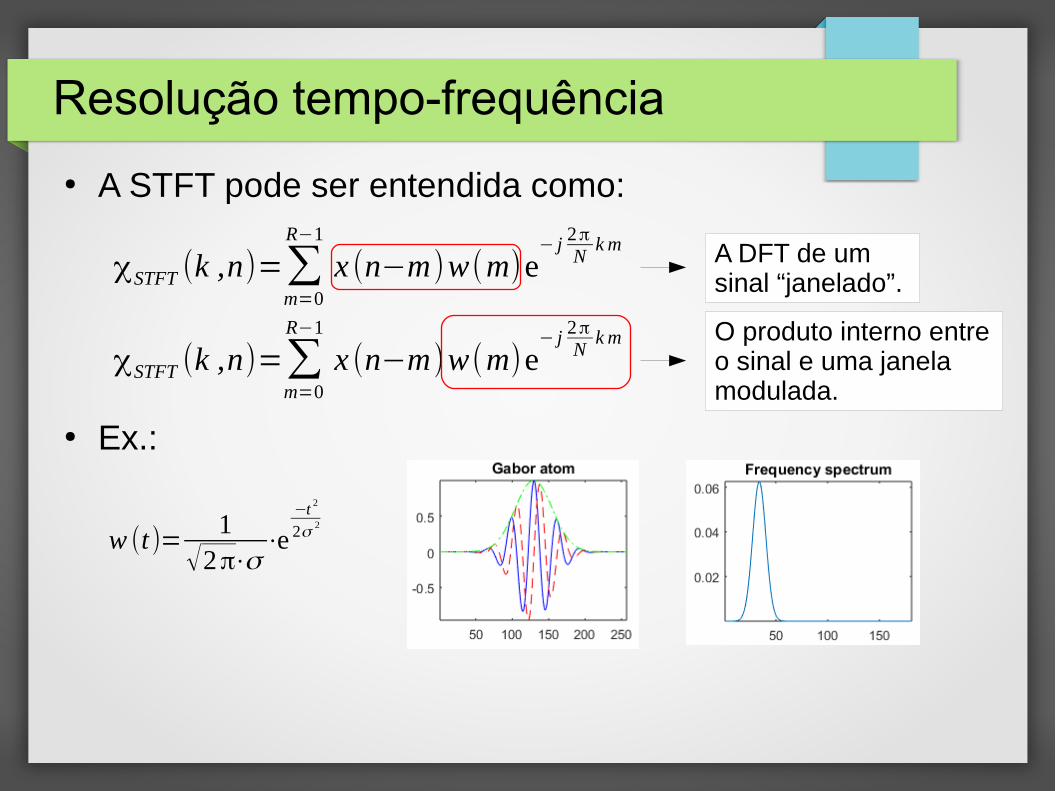
● A STFT pode ser entendida como:
χSTFT (k ,n)=∑m=0
R−1
x (n−m)w(m)e− j 2π
Nkm A DFT de um
sinal “janelado”.
χSTFT (k ,n)=∑m=0
R−1
x (n−m)w(m)e− j 2π
Nkm O produto interno entre
o sinal e uma janela modulada.
w (t)= 1√2π⋅σ
⋅e−t 2
2σ 2
● Ex.:
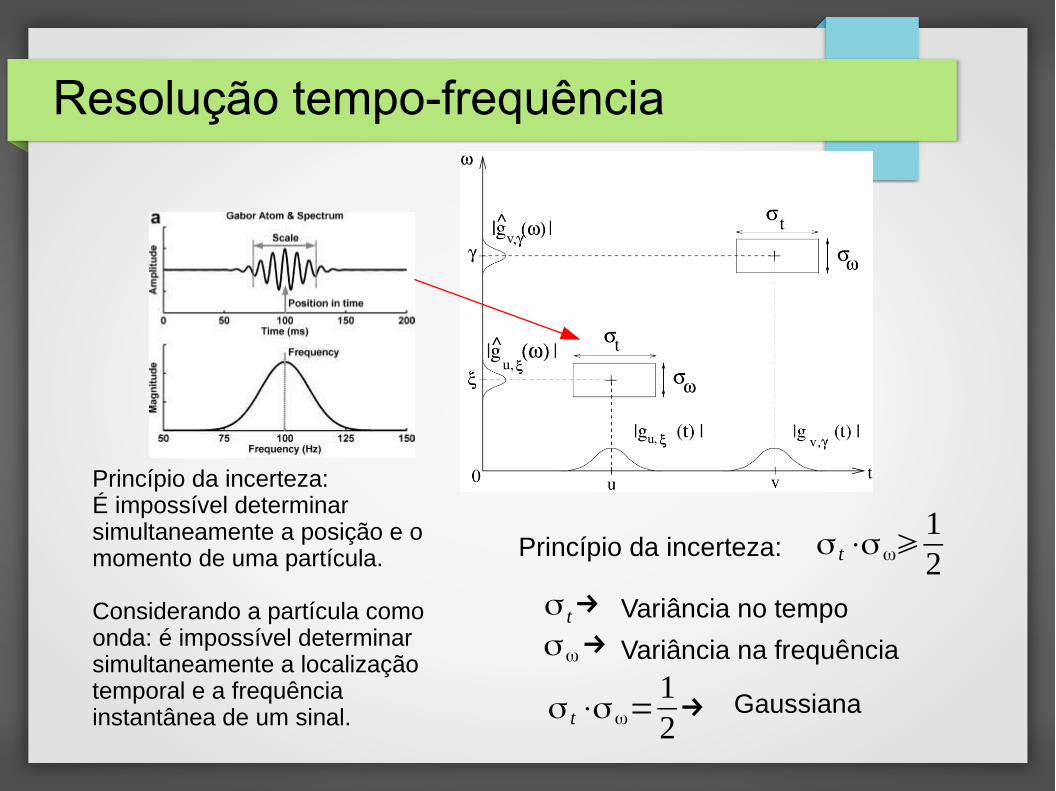
Resolução tempo-frequência
σ t⋅σω⩾12
Princípio da incerteza:
σ t→σω→
Variância no tempo
Variância na frequência
σ t⋅σω=12→ Gaussiana
Princípio da incerteza:É impossível determinar simultaneamente a posição e o momento de uma partícula.
Considerando a partícula como onda: é impossível determinar simultaneamente a localização temporal e a frequência instantânea de um sinal.
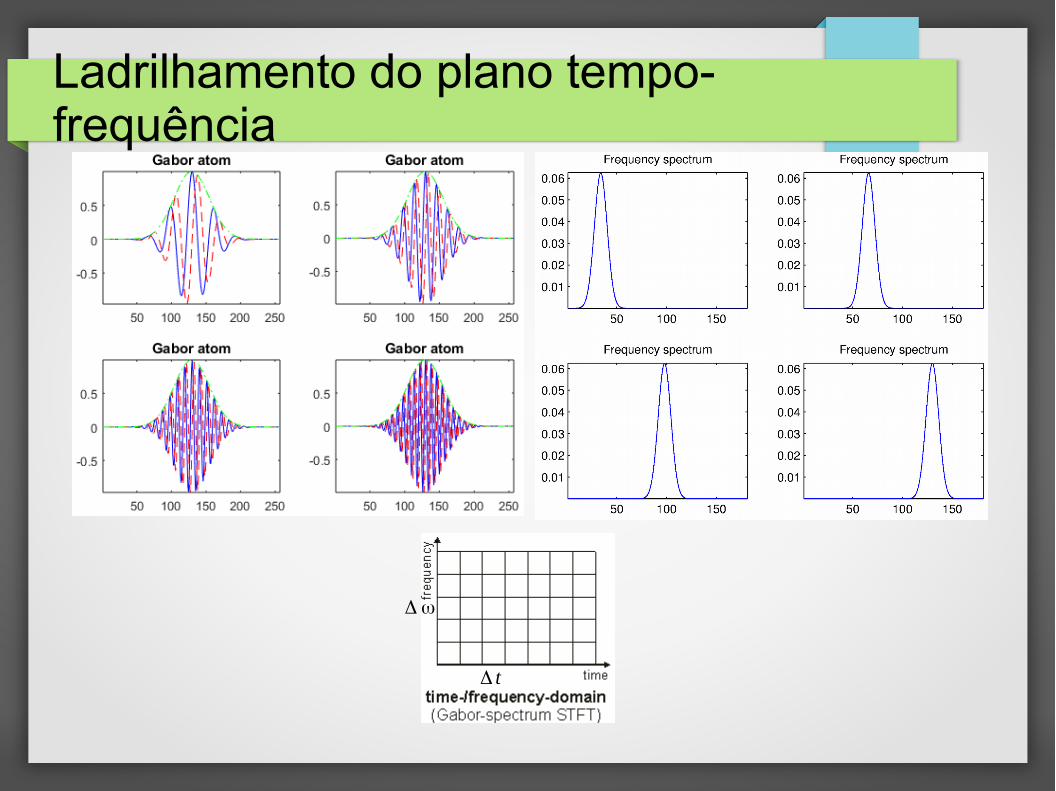
Ladrilhamento do plano tempo-frequência
Δ t
Δ ω

Exemplo: análise com diferentes janelas
Gaussian
Hamming Rectangular
Blackman
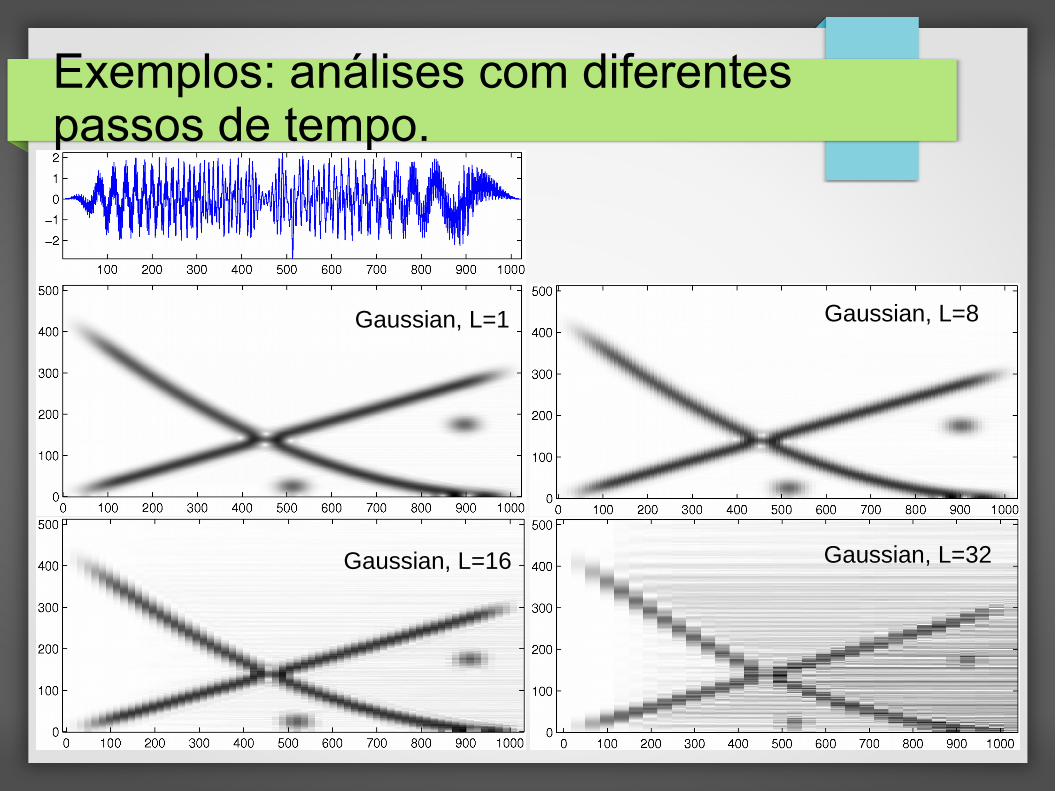
Exemplos: análises com diferentes passos de tempo.
Gaussian, L=1 Gaussian, L=8
Gaussian, L=16 Gaussian, L=32
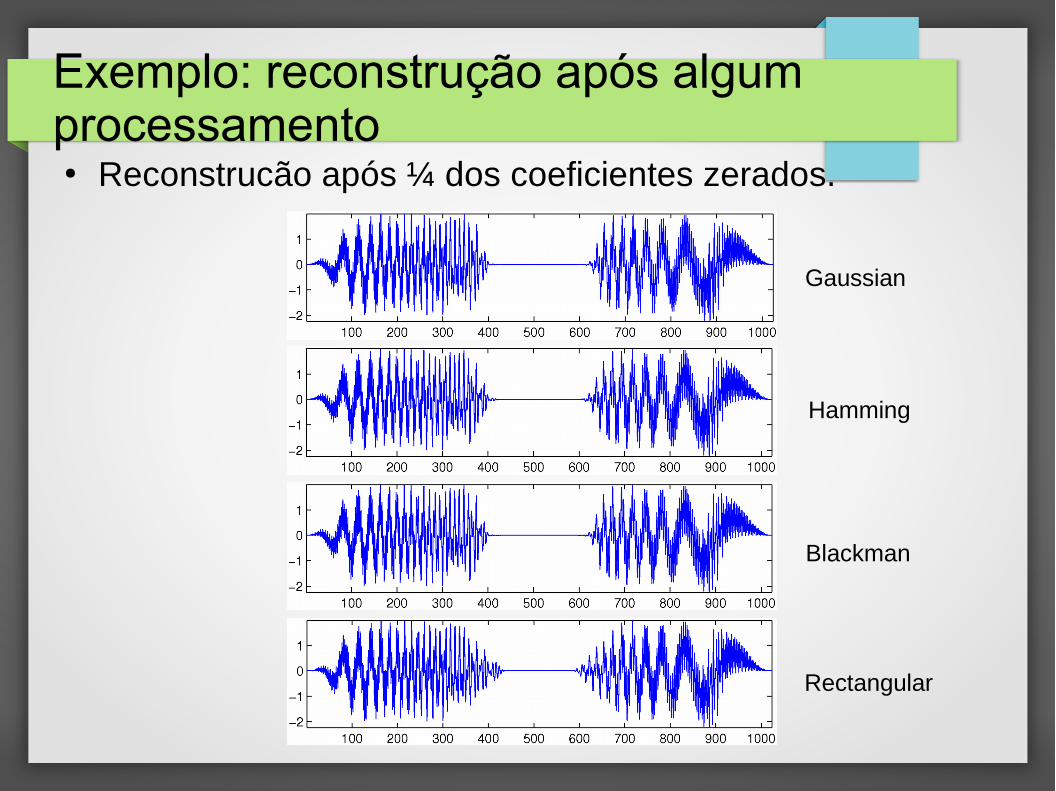
Exemplo: reconstrução após algum processamento
Gaussian
Hamming
Rectangular
Blackman
● Reconstrucão após ¼ dos coeficientes zerados.


















