Transformação de deformação no...
34
Prof. MSc. Douglas M. A. Bittencourt [email protected] Resistência dos Materiais I – SLIDES 08 Capítulo 7 Transformação de deformação no plano
Transcript of Transformação de deformação no...
Prof. MSc. Douglas M. A. [email protected]
Resistência dos Materiais I – SLIDES 08
Capítulo 7Transformação de
deformação no plano
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
Objetivos do capítulo
Transformar as componentes de deformação
associadas a um determinado sistema de
coordenadas em componentes associadas a
um sistema de coordenadas com uma orientação
diferente
Obter a deformação normal máxima e a
deformação de cisalhamento máxima em um
ponto e determinar a orientação dos elementos
sobre os quais elas agem
2

SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
Transformação da deformação no
plano
3
Estado geral de
deformação no espaço 3D
zzyzx
yzyyx
xzxyx
Estado geral de
deformação no plano 2D
yyx
xyx
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
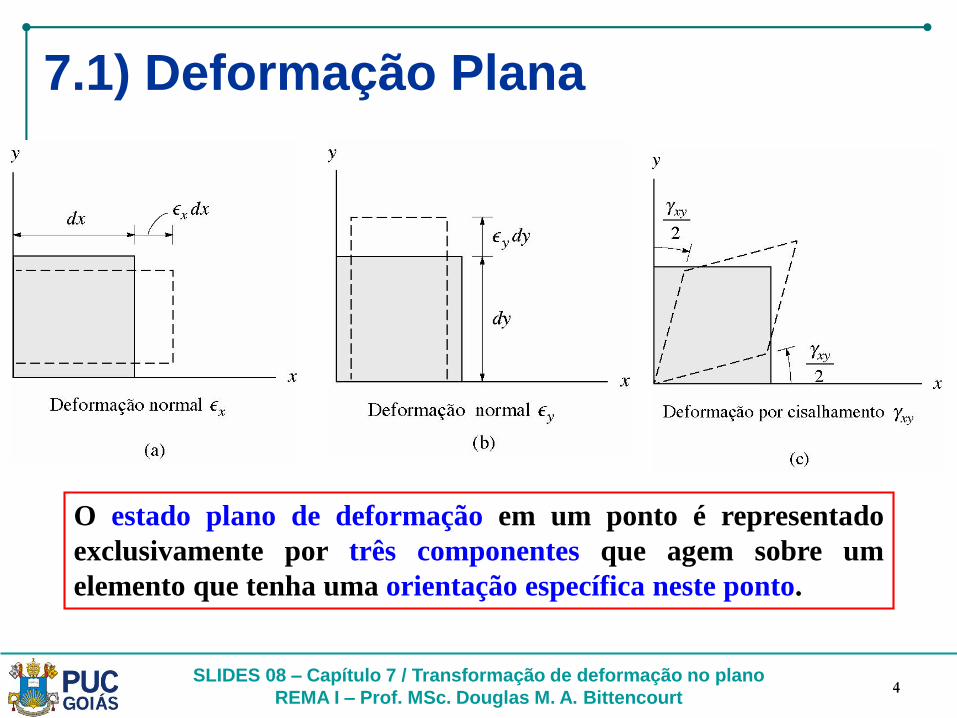
7.1) Deformação Plana
4
O estado plano de deformação em um ponto é representado
exclusivamente por três componentes que agem sobre um
elemento que tenha uma orientação específica neste ponto.
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt5
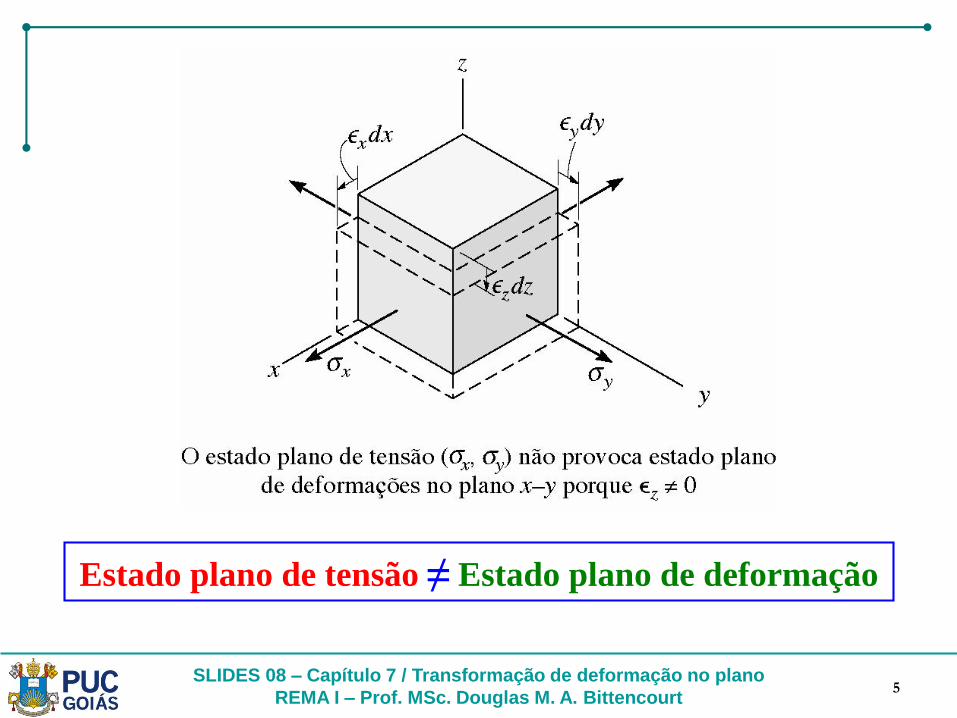
Estado plano de tensão ≠ Estado plano de deformação
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
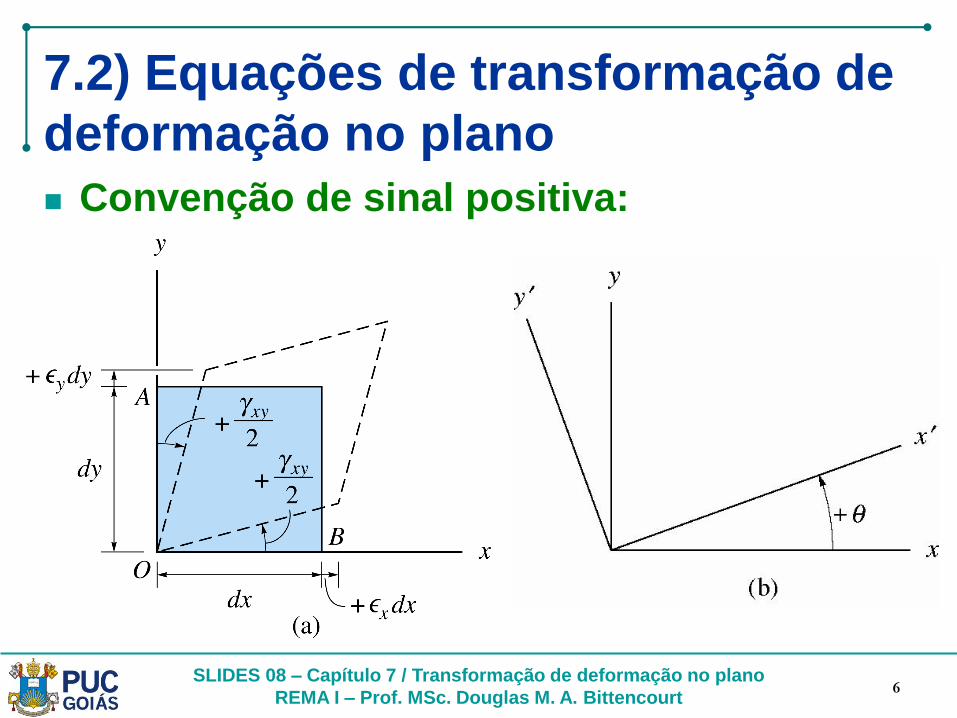
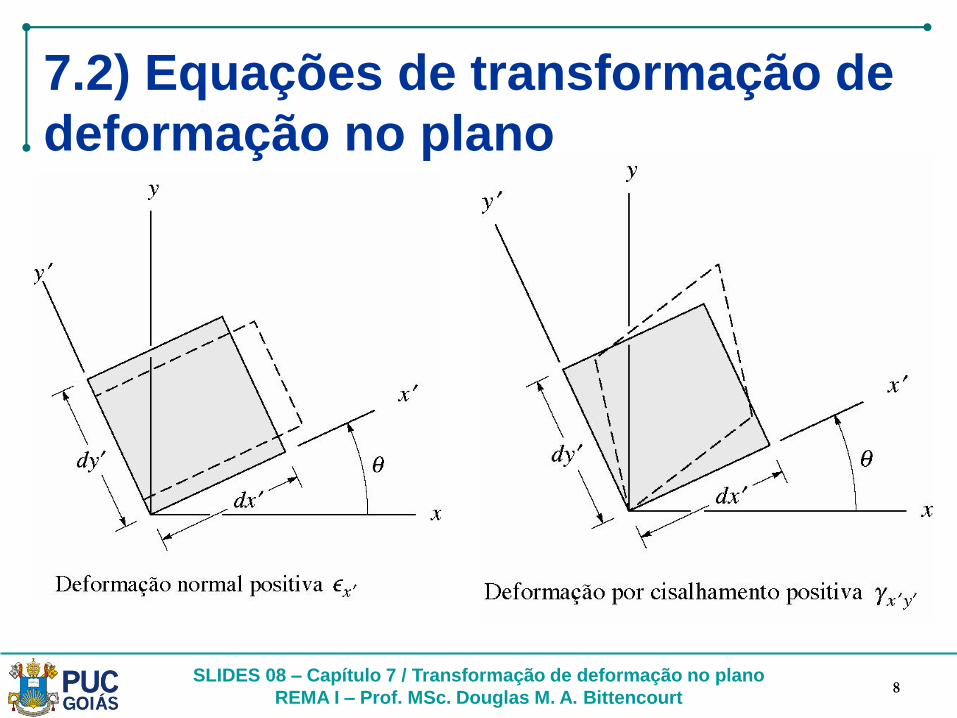
7.2) Equações de transformação de
deformação no plano
Convenção de sinal positiva:
6
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt7
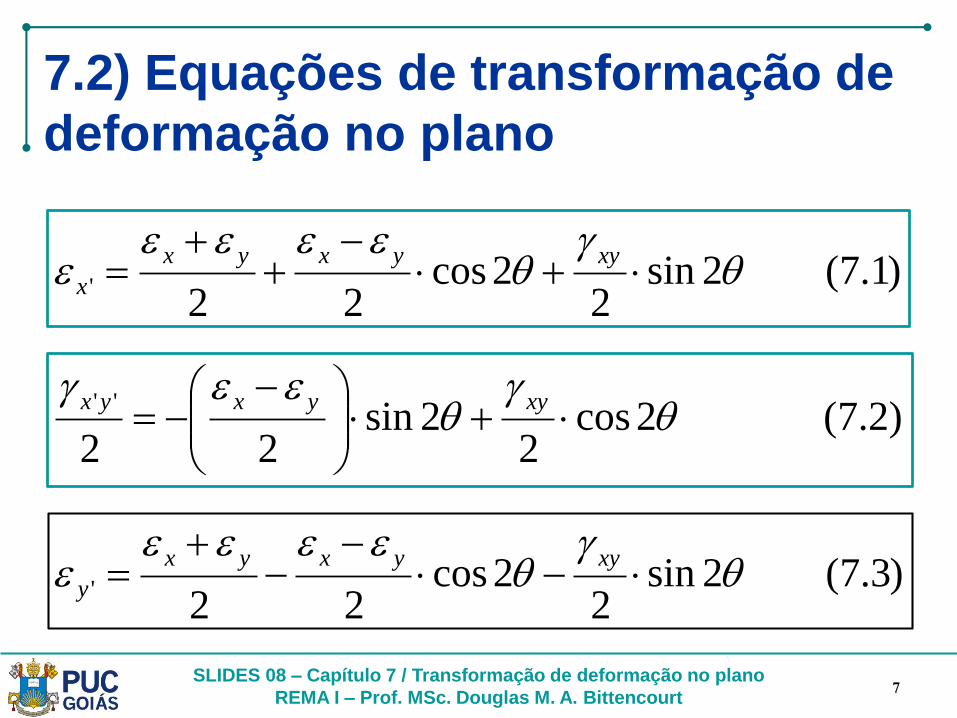
)1.7(2sin2
2cos22
'
xyyxyx
x
)2.7(2cos2
2sin22
''
xyyxyx
)3.7(2sin2
2cos22
'
xyyxyx
y
7.2) Equações de transformação de
deformação no plano
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
7.2) Equações de transformação de
deformação no plano
8
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
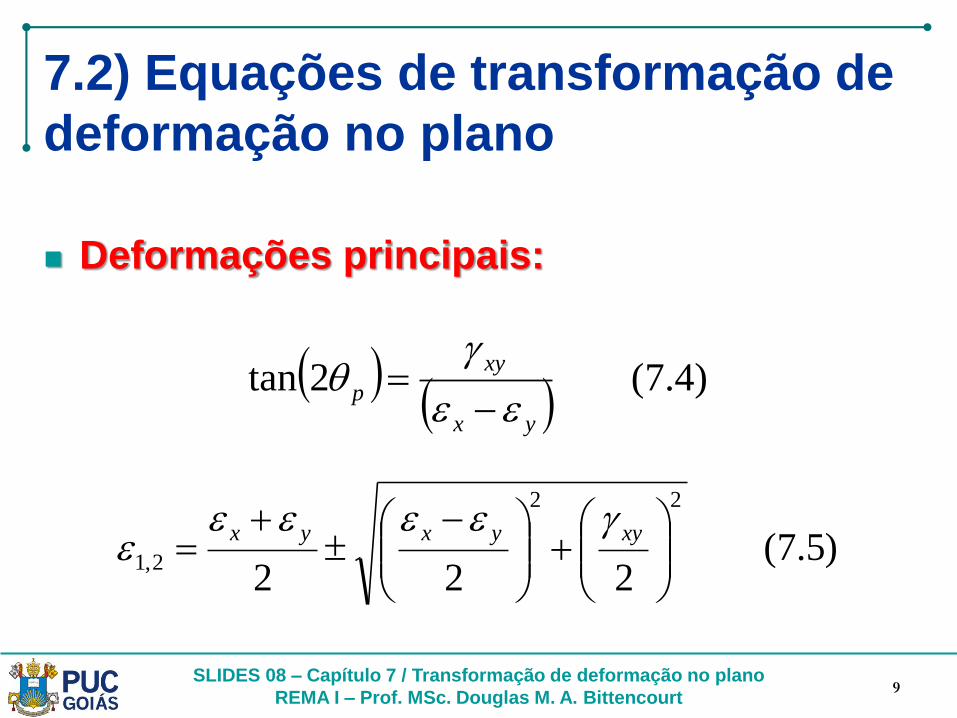
7.2) Equações de transformação de
deformação no plano
Deformações principais:
9
)4.7(2tanyx
xy
p
)5.7(222
22
2,1
xyyxyx
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
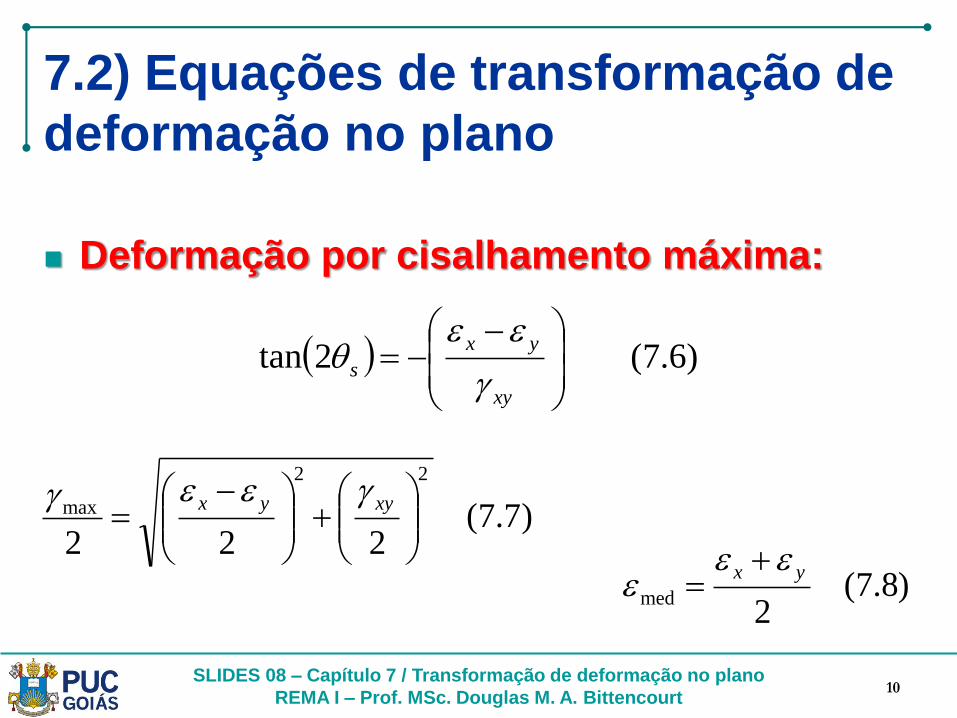
7.2) Equações de transformação de
deformação no plano
Deformação por cisalhamento máxima:
10
)6.7(2tan
xy
yx
s
)7.7(222
22
max
xyyx
)8.7(2
med
yx
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
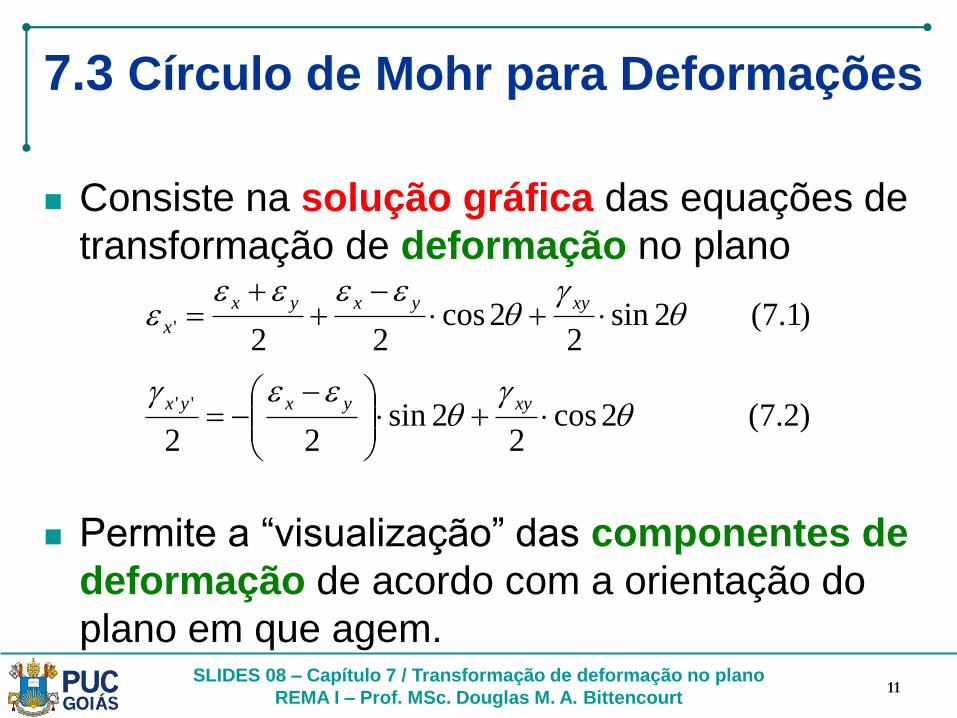
7.3 Círculo de Mohr para Deformações
Consiste na solução gráfica das equações de
transformação de deformação no plano
Permite a “visualização” das componentes de
deformação de acordo com a orientação do
plano em que agem.
11
)1.7(2sin2
2cos22
'
xyyxyx
x
)2.7(2cos2
2sin22
''
xyyxyx
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
Da mesma forma que foi feito para as tensões,
pode-se obter a equação do círculo de Mohr
para as deformações:
Dedução do Círculo de Mohr
12
)9.7(2
2
2
''2
' Ryx
medx
2
yx
med
22
22
xyyxR
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
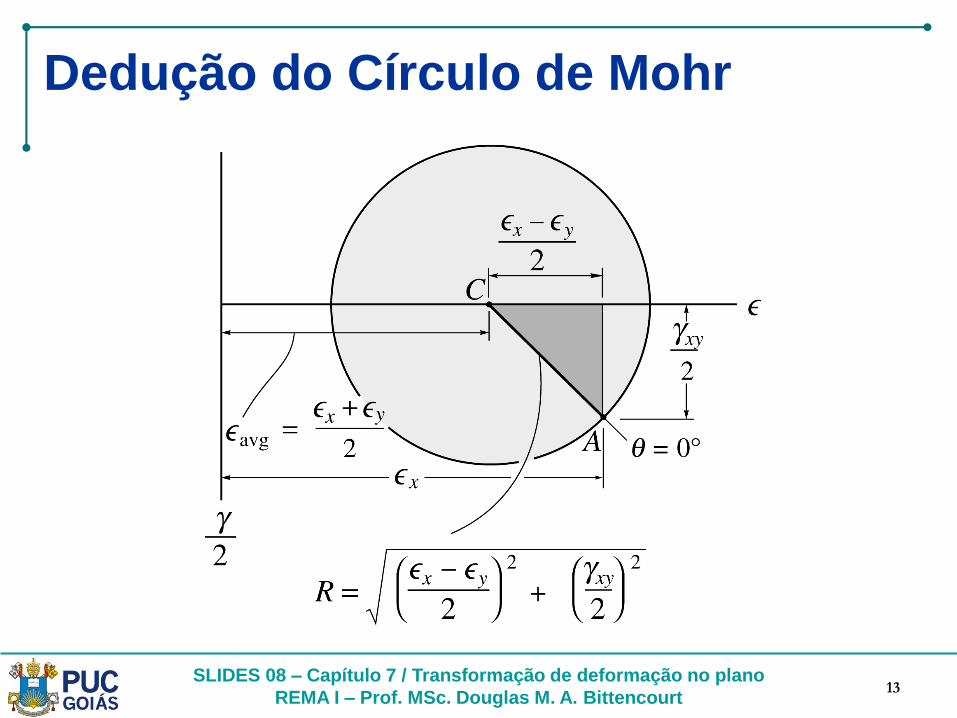
Dedução do Círculo de Mohr
13
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
Construção do Círculo de Mohr
14
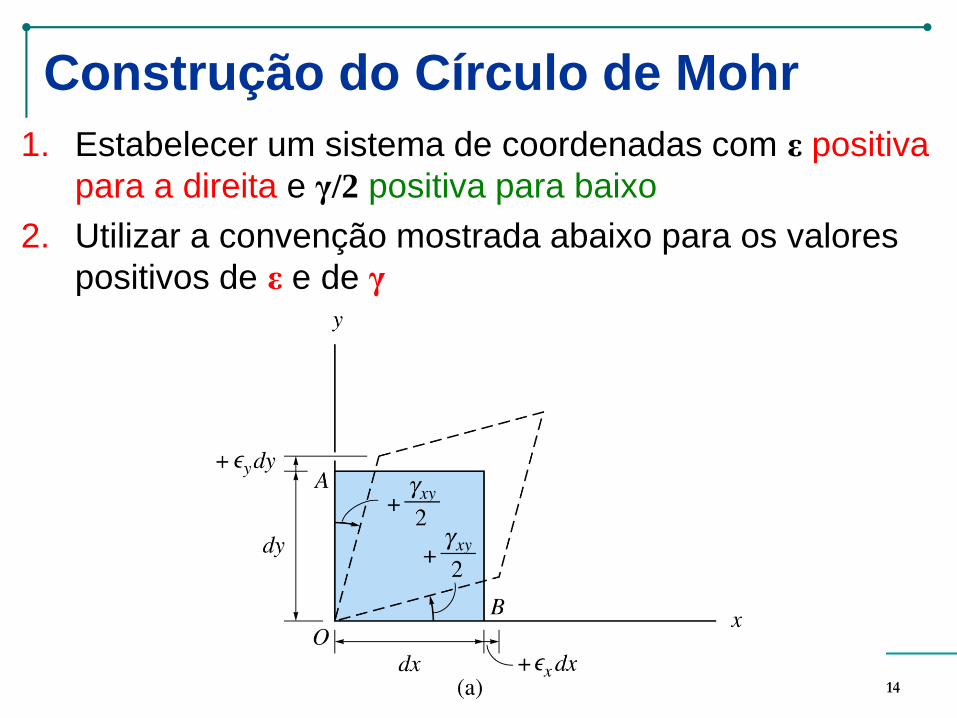
1. Estabelecer um sistema de coordenadas com ε positiva
para a direita e γ/2 positiva para baixo
2. Utilizar a convenção mostrada abaixo para os valores
positivos de ε e de γ
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
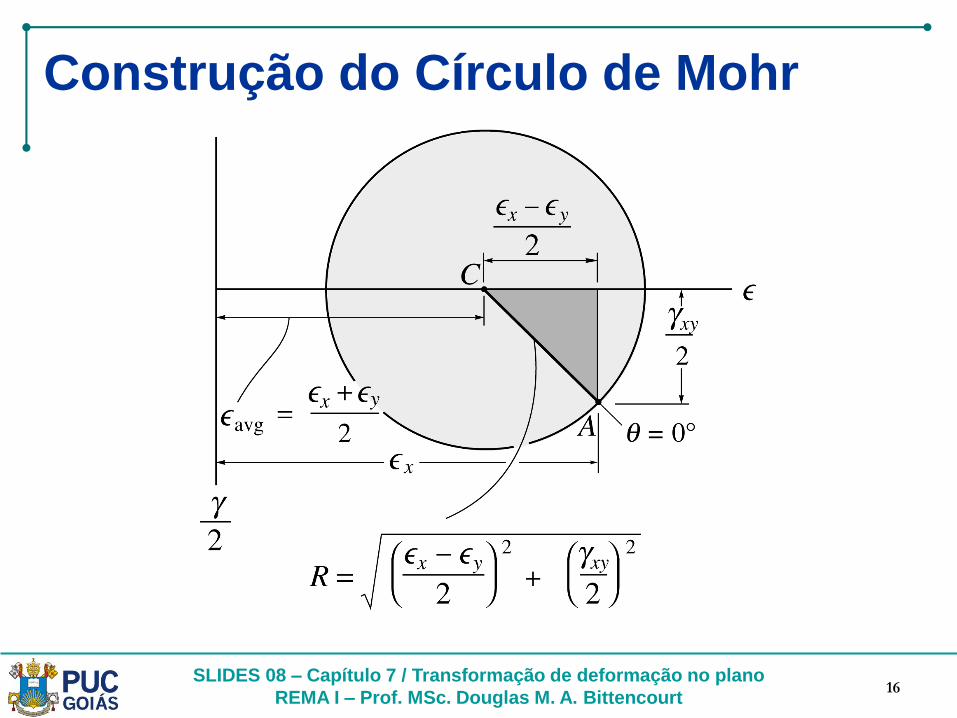
Construção do Círculo de Mohr
3. Marcar o centro do círculo C, que está localizado no
eixo ε a uma distância de εméd = (εx+ εy)/2 da origem
4. Marcar o ponto de referência A cujas coordenadas são
A(εx, γxy/2), referente ao ângulo θ=0º, ou seja, alinhado
com o eixo εx do estado de deformações dado
5. Unir o ponto A ao centro C, determinando a hipotenusa
CA, que representa o raio R do círculo. Um ponto de
coordenadas (εx, -γxy/2), diametralmente oposto ao
ponto A também pode ser marcado
6. Traçar o círculo utilizando o raio encontrado
15
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
Construção do Círculo de Mohr
16
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
Análise com o Círculo de Mohr
17
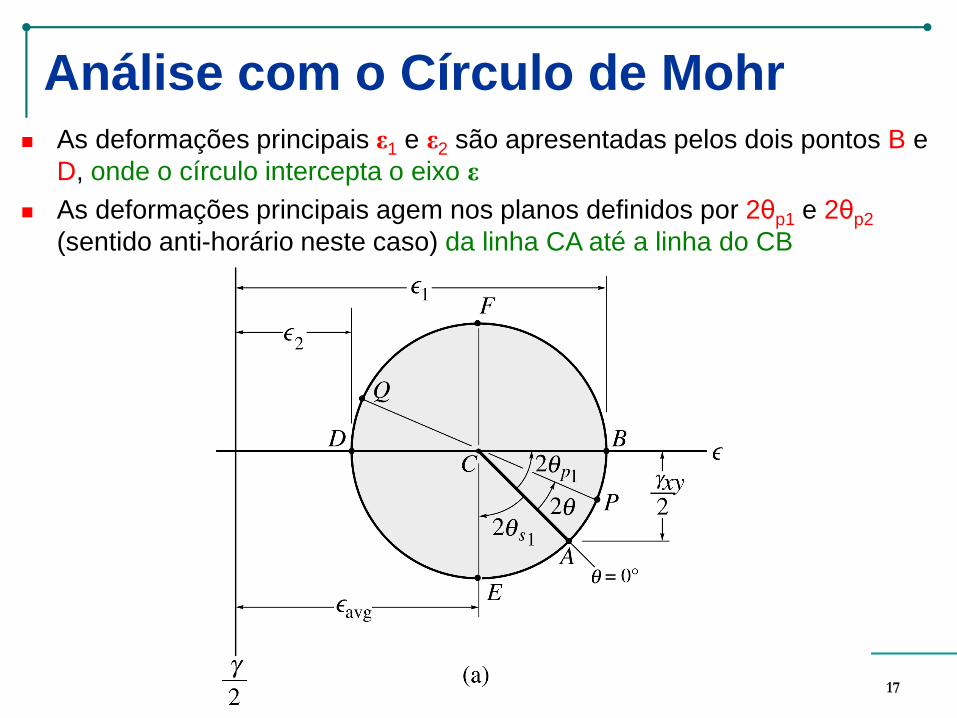
As deformações principais ε1 e ε2 são apresentadas pelos dois pontos B e
D, onde o círculo intercepta o eixo ε
As deformações principais agem nos planos definidos por 2θp1 e 2θp2
(sentido anti-horário neste caso) da linha CA até a linha do CB
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
Análise com o Círculo de Mohr
18
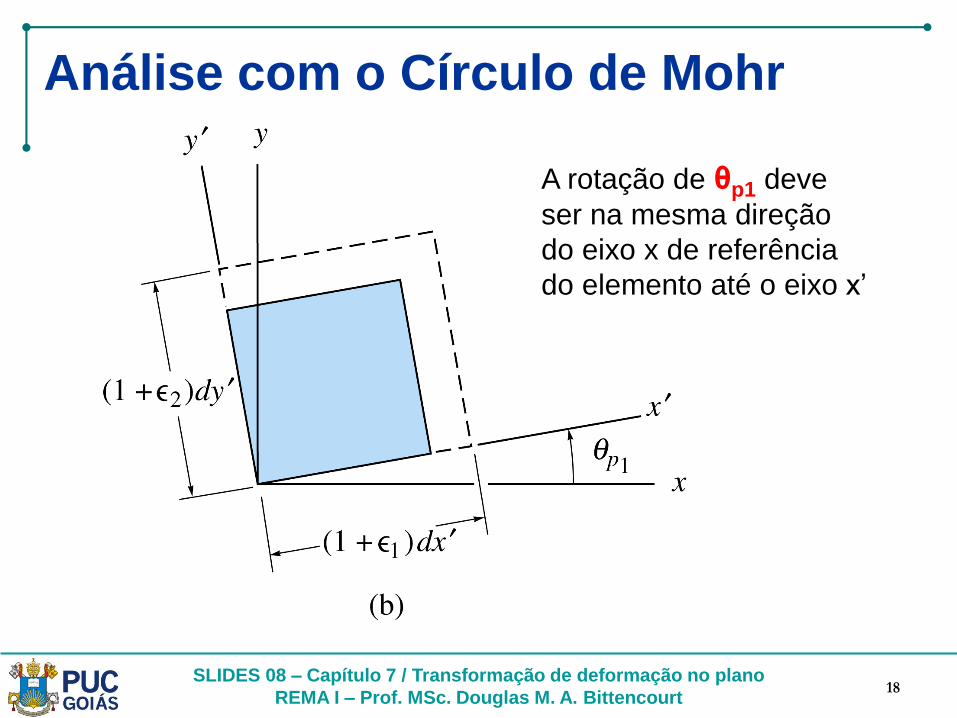
A rotação de θp1 deve
ser na mesma direção
do eixo x de referência
do elemento até o eixo x’
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
Análise com o Círculo de Mohr
19
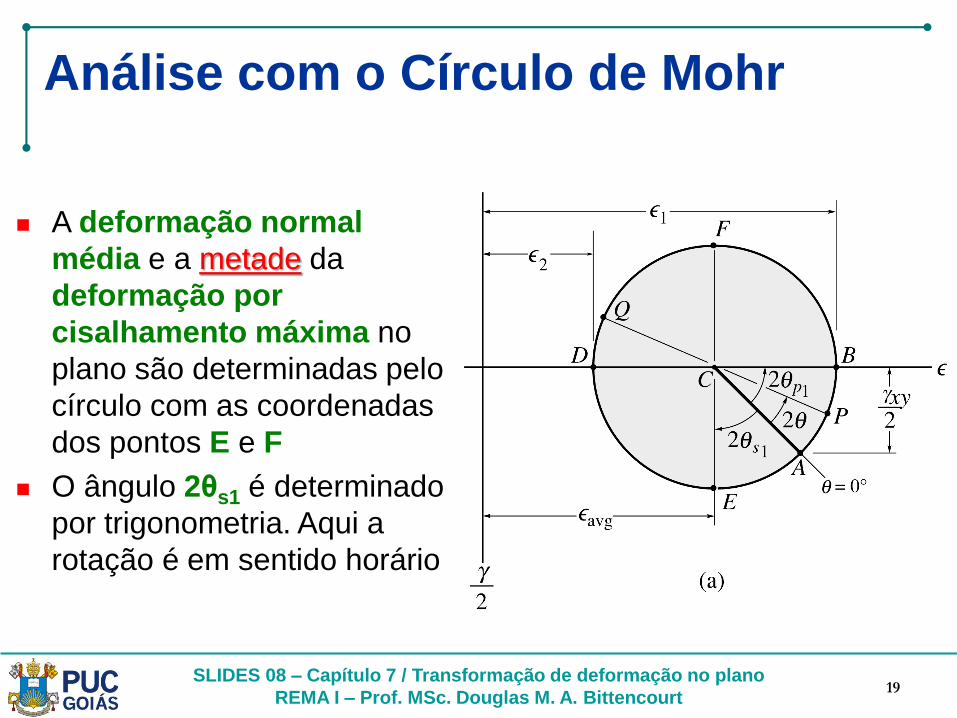
A deformação normal
média e a metade da
deformação por
cisalhamento máxima no
plano são determinadas pelo
círculo com as coordenadas
dos pontos E e F
O ângulo 2θs1 é determinado
por trigonometria. Aqui a
rotação é em sentido horário
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
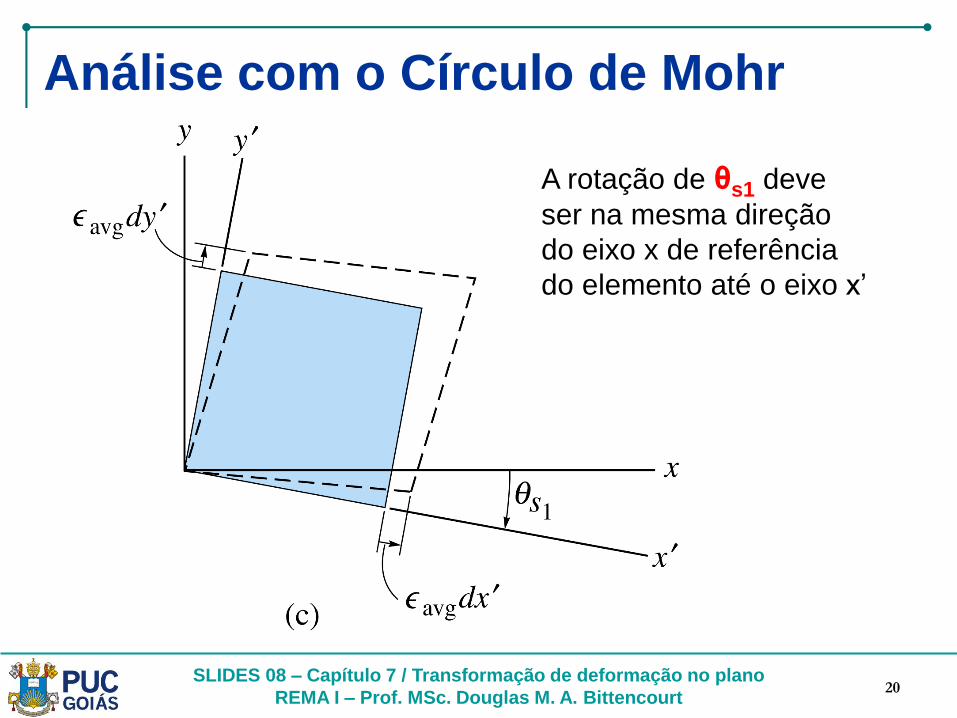
Análise com o Círculo de Mohr
20
A rotação de θs1 deve
ser na mesma direção
do eixo x de referência
do elemento até o eixo x’
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
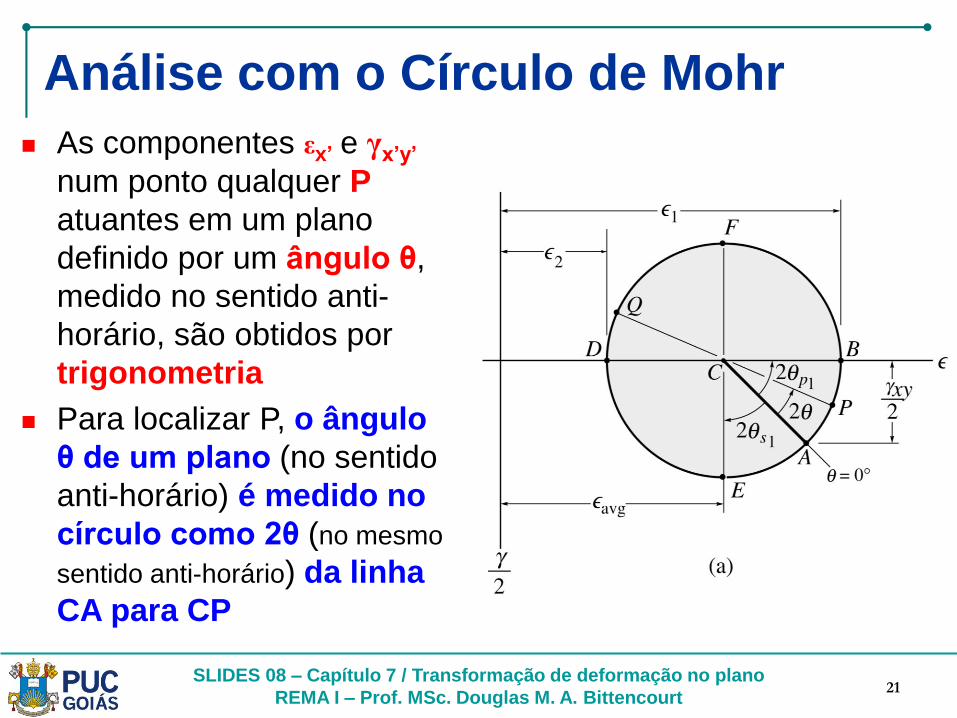
Análise com o Círculo de Mohr
21
As componentes εx’ e γx’y’
num ponto qualquer P
atuantes em um plano
definido por um ângulo θ,
medido no sentido anti-
horário, são obtidos por
trigonometria
Para localizar P, o ângulo
θ de um plano (no sentido
anti-horário) é medido no
círculo como 2θ (no mesmo
sentido anti-horário) da linha
CA para CP
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt
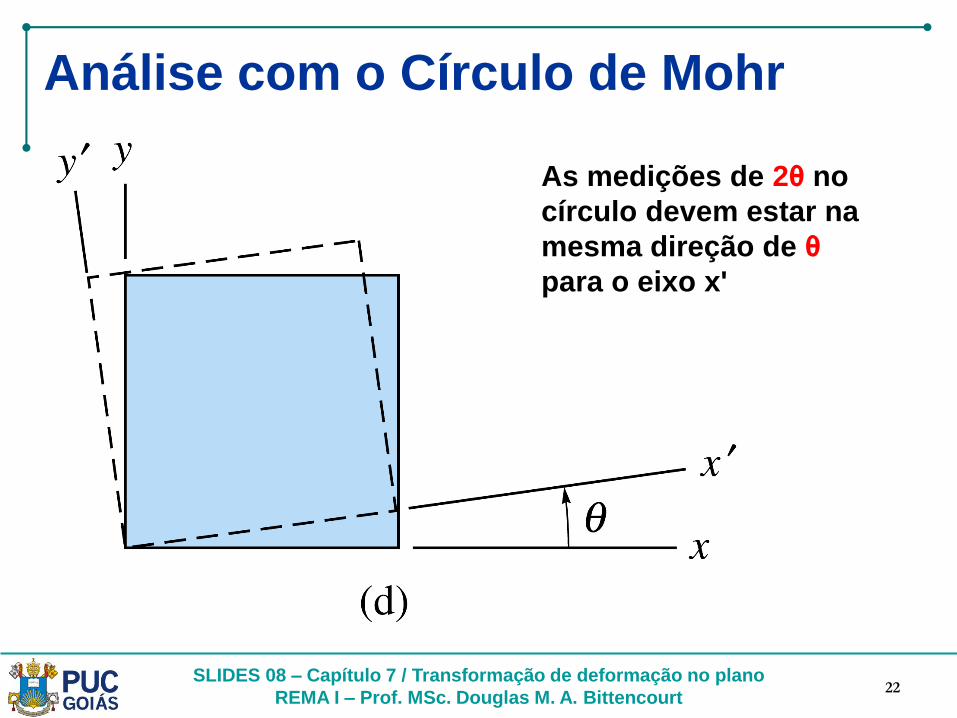
Análise com o Círculo de Mohr
22
As medições de 2θ no
círculo devem estar na
mesma direção de θ
para o eixo x'
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt23
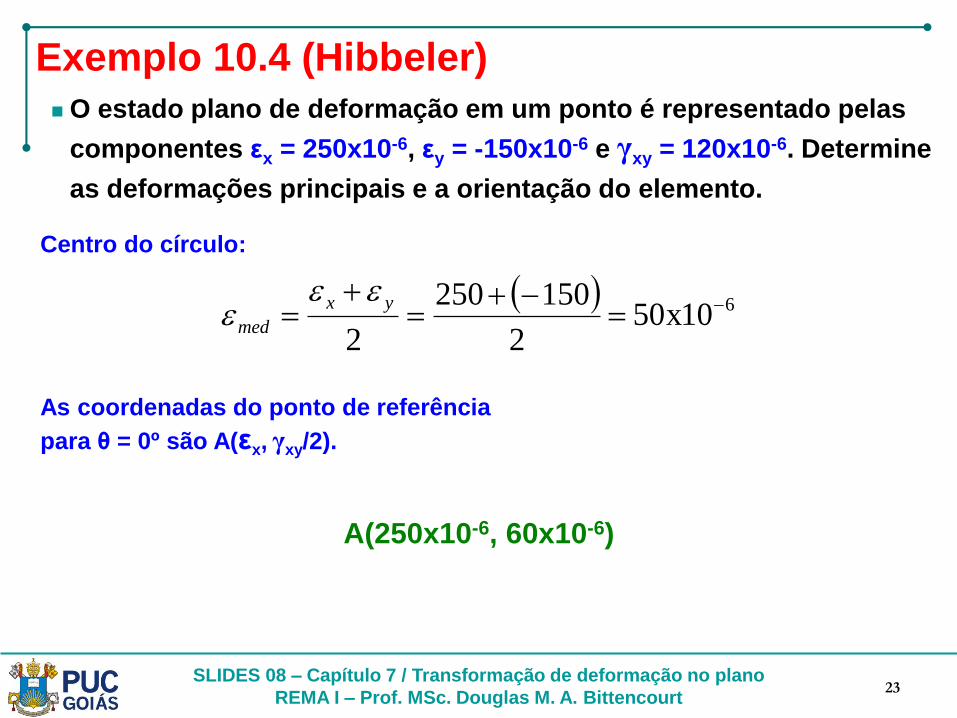
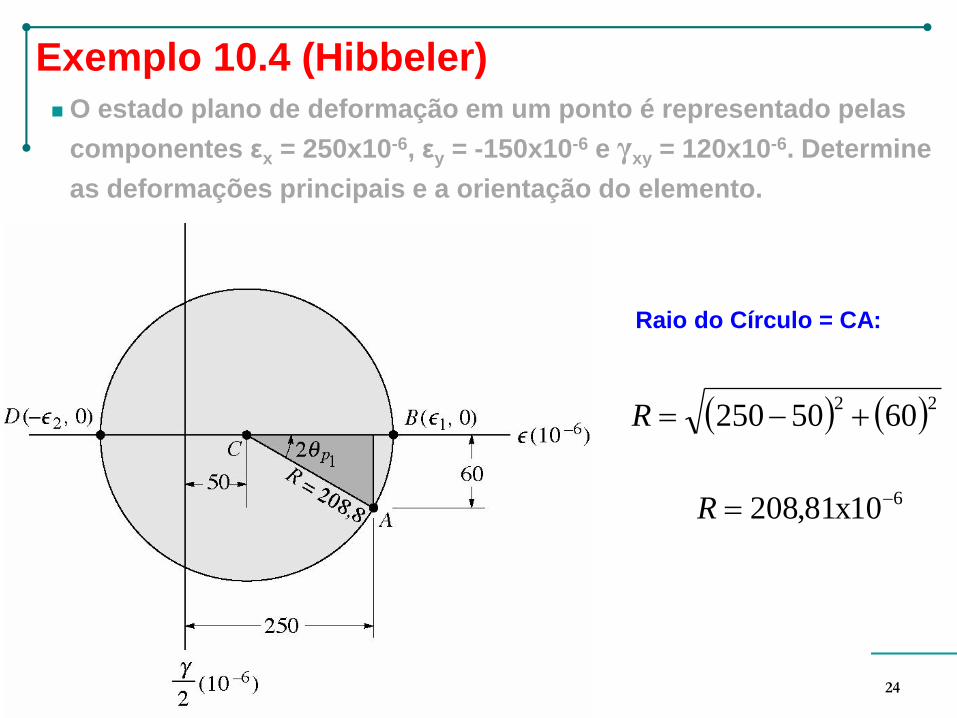
Exemplo 10.4 (Hibbeler)
O estado plano de deformação em um ponto é representado pelas
componentes εx = 250x10-6, εy = -150x10-6 e γxy = 120x10-6. Determine
as deformações principais e a orientação do elemento.
Centro do círculo:
610x502
150250
2
yx
med
As coordenadas do ponto de referência
para θ = 0º são A(εx, γxy/2).
A(250x10-6, 60x10-6)
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt24
Exemplo 10.4 (Hibbeler)
O estado plano de deformação em um ponto é representado pelas
componentes εx = 250x10-6, εy = -150x10-6 e γxy = 120x10-6. Determine
as deformações principais e a orientação do elemento.
Raio do Círculo = CA:
226050250 R
610x81,208 R

SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt25
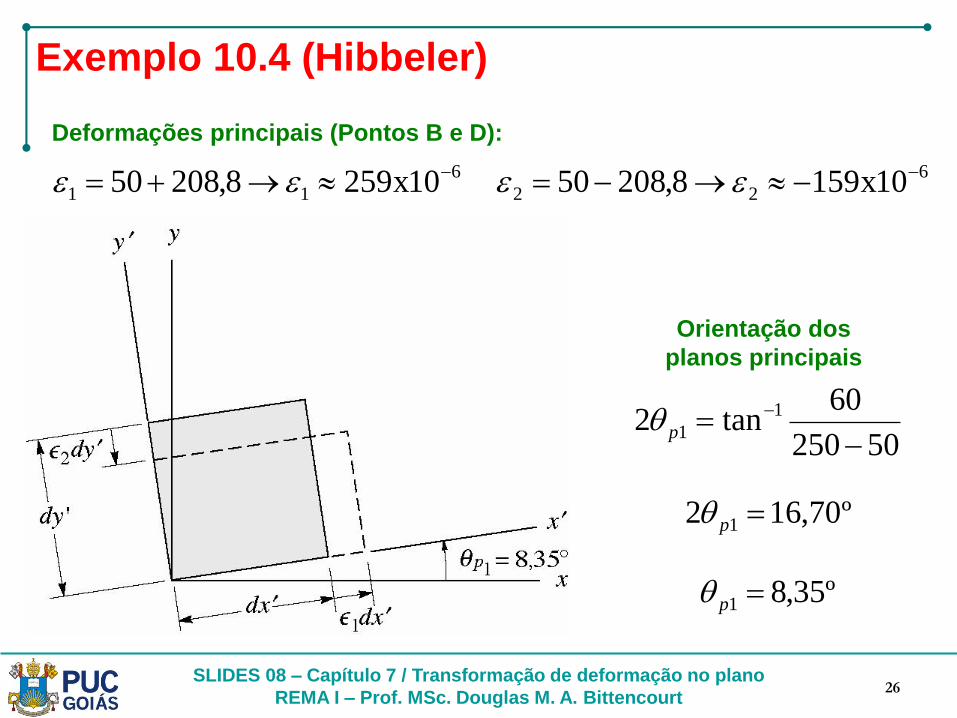
Exemplo 10.4 (Hibbeler)
Deformações principais (Pontos B e D):
6
11 10x2598,20850 6
22 10x1598,20850
Orientação dos
planos principais
50250
60tan2 1
1
p
º70,162 1 p
º35,81 p
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt26
Exemplo 10.4 (Hibbeler)
Deformações principais (Pontos B e D):
6
11 10x2598,20850 6
22 10x1598,20850
Orientação dos
planos principais
50250
60tan2 1
1
p
º70,162 1 p
º35,81 p
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt27
Exemplo 10.5 (Hibbeler)
O estado plano de deformação em um ponto é representado pelas
componentes εx = 250x10-6, εy = -150x10-6 e γxy = 120x10-6. Determine
as deformações por cisalhamento máximas no plano e a orientação
do elemento.
Centro do círculo:
610x502
150250
2
yx
med
As coordenadas do ponto de referência
para θ = 0º são A(εx, γxy/2).
A(250x10-6, 60x10-6)
Mesmo círculo de Mohr
do exemplo anterior
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt28
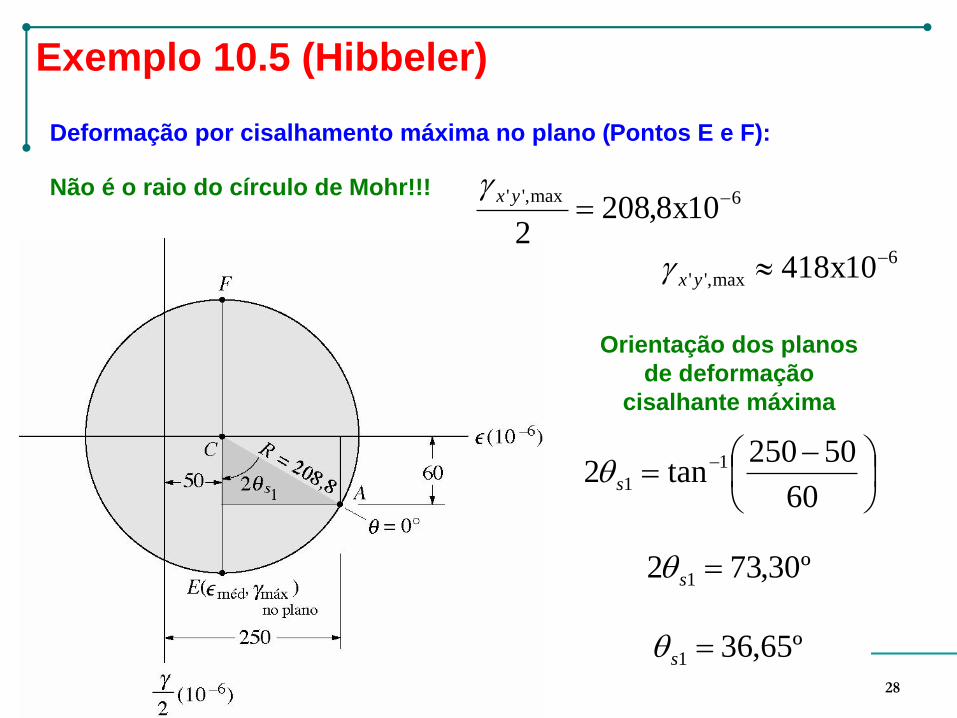
Exemplo 10.5 (Hibbeler)
Deformação por cisalhamento máxima no plano (Pontos E e F):
Orientação dos planos
de deformação
cisalhante máxima
60
50250tan2 1
1s
º30,732 1 s
º65,361 s
Não é o raio do círculo de Mohr!!! 6max,''10x8,208
2
yx
6
max,'' 10x418 yx

SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt29
Exemplo 10.5 (Hibbeler)
Deformação por cisalhamento máxima no plano (Pontos E e F):
Orientação dos planos
de deformação
cisalhante máxima
60
50250tan2 1
1s
º30,732 1 s
º65,361 s
Não é o raio do círculo de Mohr!!! 6max,''10x8,208
2
yx
6
max,'' 10x418 yx
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt30
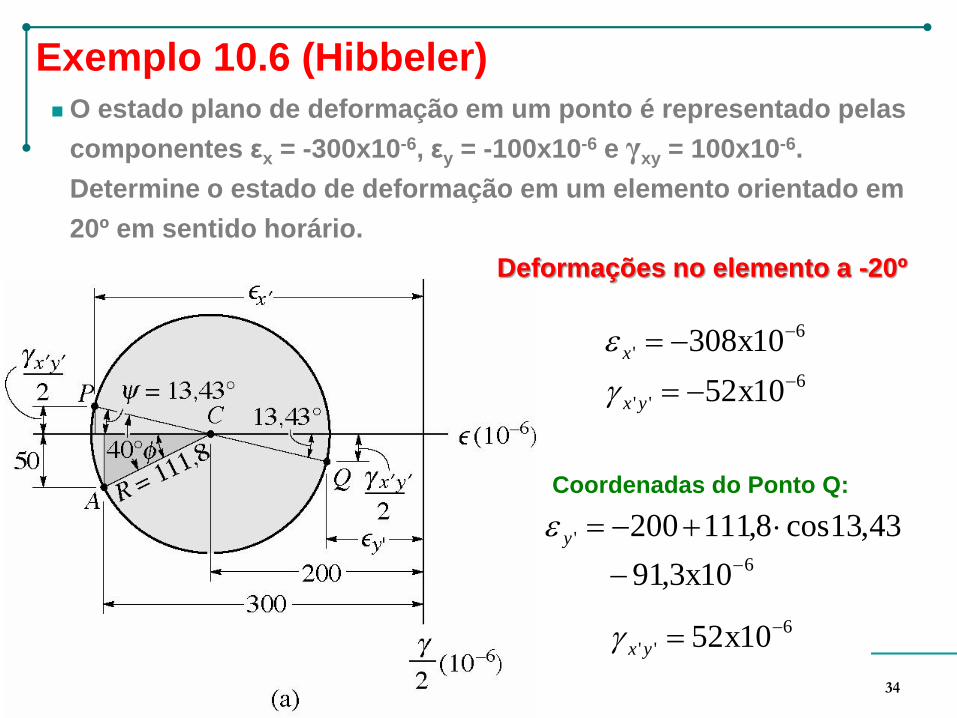
Exemplo 10.6 (Hibbeler)
O estado plano de deformação em um ponto é representado pelas
componentes εx = -300x10-6, εy = -100x10-6 e γxy = 100x10-6.
Determine o estado de deformação em um elemento orientado em
20º em sentido horário.
Centro do círculo:
610x2002
100300
2
yx
med
As coordenadas do ponto de referência
para θ = 0º são A(εx, γxy/2).
A(-300x10-6, 50x10-6)
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt31
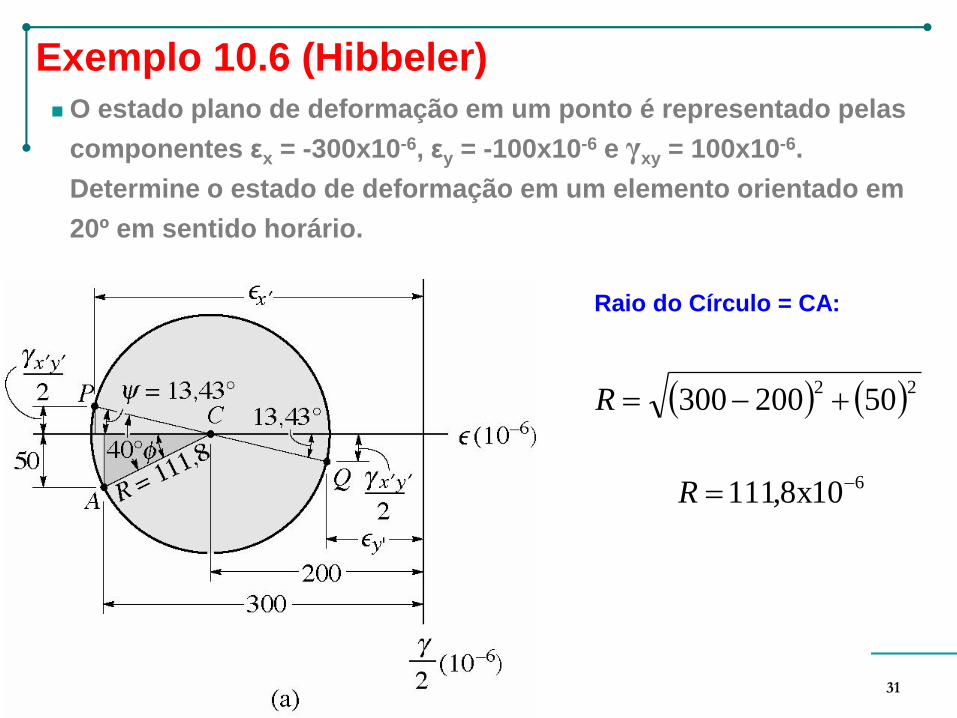
Exemplo 10.6 (Hibbeler)
O estado plano de deformação em um ponto é representado pelas
componentes εx = -300x10-6, εy = -100x10-6 e γxy = 100x10-6.
Determine o estado de deformação em um elemento orientado em
20º em sentido horário.
Raio do Círculo = CA:
2250200300 R
610x8,111 R
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt32
Exemplo 10.6 (Hibbeler)
O estado plano de deformação em um ponto é representado pelas
componentes εx = -300x10-6, εy = -100x10-6 e γxy = 100x10-6.
Determine o estado de deformação em um elemento orientado em
20º em sentido horário.
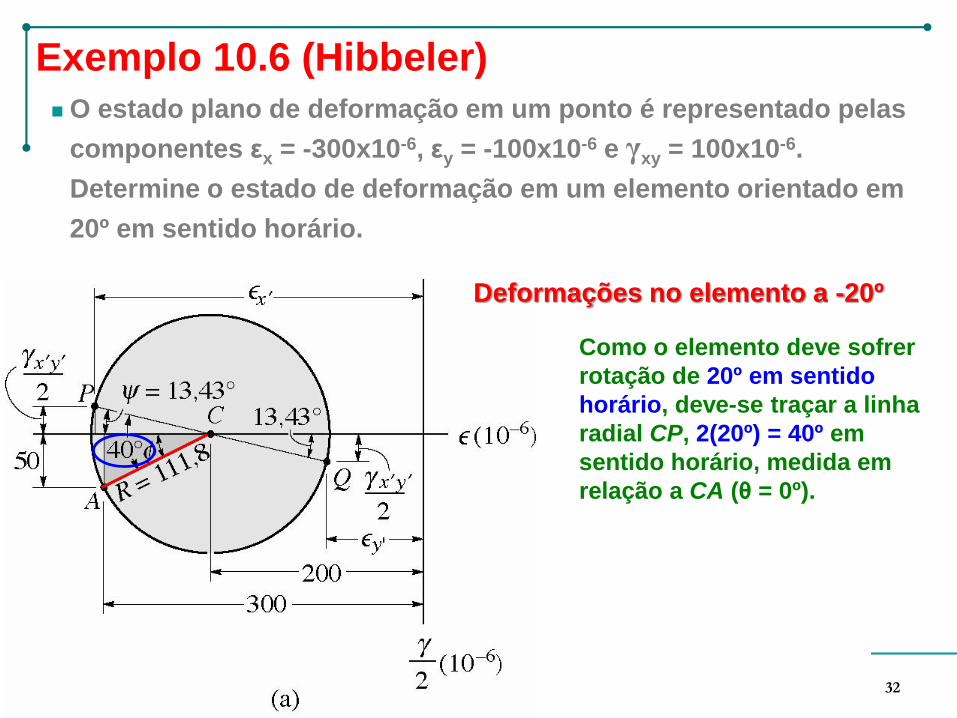
Como o elemento deve sofrer
rotação de 20º em sentido
horário, deve-se traçar a linha
radial CP, 2(20º) = 40º em
sentido horário, medida em
relação a CA (θ = 0º).
Deformações no elemento a -20º
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt33
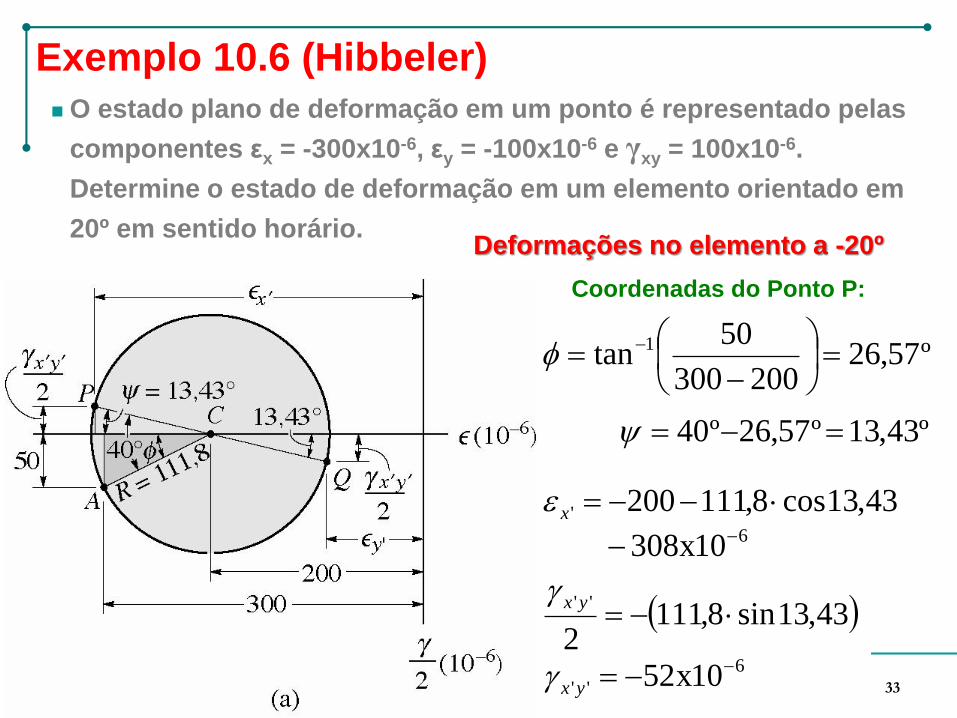
Exemplo 10.6 (Hibbeler)
O estado plano de deformação em um ponto é representado pelas
componentes εx = -300x10-6, εy = -100x10-6 e γxy = 100x10-6.
Determine o estado de deformação em um elemento orientado em
20º em sentido horário.Deformações no elemento a -20º
Coordenadas do Ponto P:
º57,26200300
50tan 1
º43,13º57,26º40
6
'
10x308
43,13cos8,111200
x
6
''
''
10x52
43,13sin8,1112
yx
yx
SLIDES 08 – Capítulo 7 / Transformação de deformação no plano
REMA I – Prof. MSc. Douglas M. A. Bittencourt34
Exemplo 10.6 (Hibbeler)
O estado plano de deformação em um ponto é representado pelas
componentes εx = -300x10-6, εy = -100x10-6 e γxy = 100x10-6.
Determine o estado de deformação em um elemento orientado em
20º em sentido horário.
6
' 10x308 x6
'' 10x52 yx
Deformações no elemento a -20º
Coordenadas do Ponto Q:
6
'' 10x52 yx
6
'
10x3,91
43,13cos8,111200
y