Tragwerkslehre II - gbd.atgbd.at/skripten/TWL2.pdf · reine Biegung: κ= 1 R Krümmung ϕ Torsion:...
45
Tragwerkslehre II Festigkeitslehre Ausgabe: Februar 2017 Dipl.-Ing. E. Schuler
Transcript of Tragwerkslehre II - gbd.atgbd.at/skripten/TWL2.pdf · reine Biegung: κ= 1 R Krümmung ϕ Torsion:...
Tragwerkslehre IIFestigkeitslehre
Ausgabe: Februar 2017
Dipl.-Ing. E. Schuler
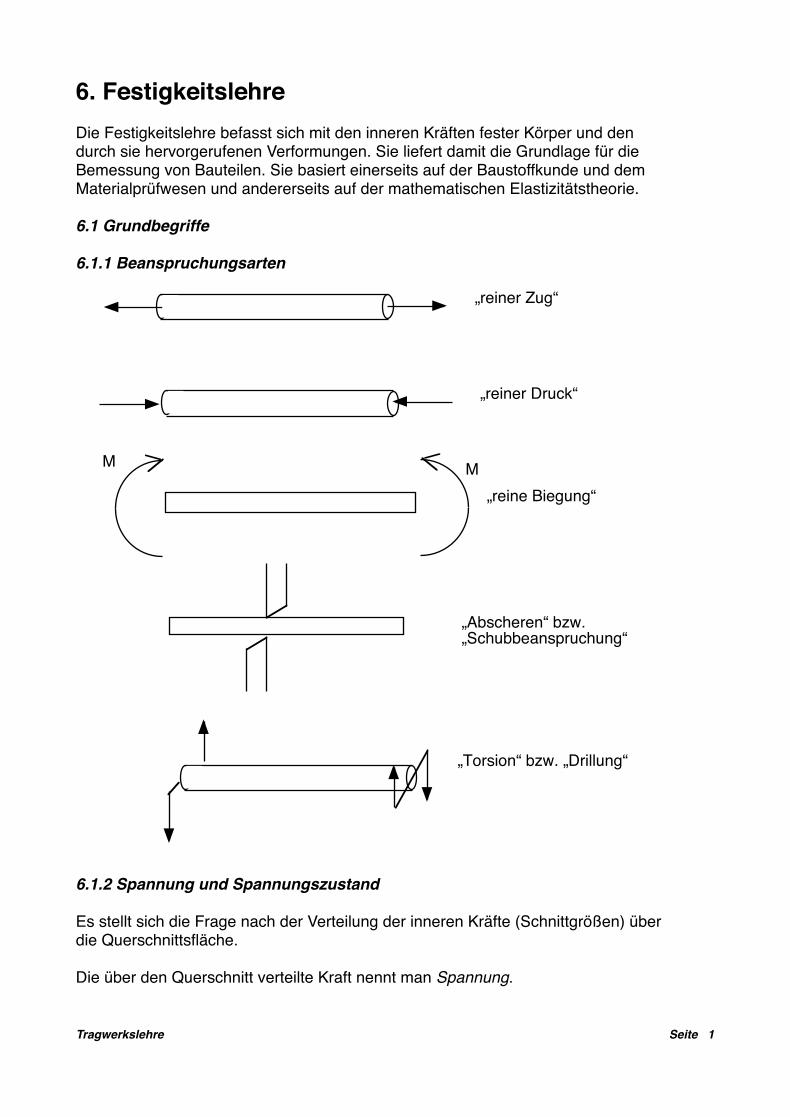
6. FestigkeitslehreDie Festigkeitslehre befasst sich mit den inneren Kräften fester Körper und den durch sie hervorgerufenen Verformungen. Sie liefert damit die Grundlage für die Bemessung von Bauteilen. Sie basiert einerseits auf der Baustoffkunde und dem Materialprüfwesen und andererseits auf der mathematischen Elastizitätstheorie.
6.1 Grundbegriffe
6.1.1 Beanspruchungsarten
�
6.1.2 Spannung und Spannungszustand
Es stellt sich die Frage nach der Verteilung der inneren Kräfte (Schnittgrößen) über die Querschnittsfläche.
Die über den Querschnitt verteilte Kraft nennt man Spannung.
„reiner Zug“
„reiner Druck“
MM
„reine Biegung“
„Abscheren“ bzw. „Schubbeanspruchung“
„Torsion“ bzw. „Drillung“
Tragwerkslehre Seite �1
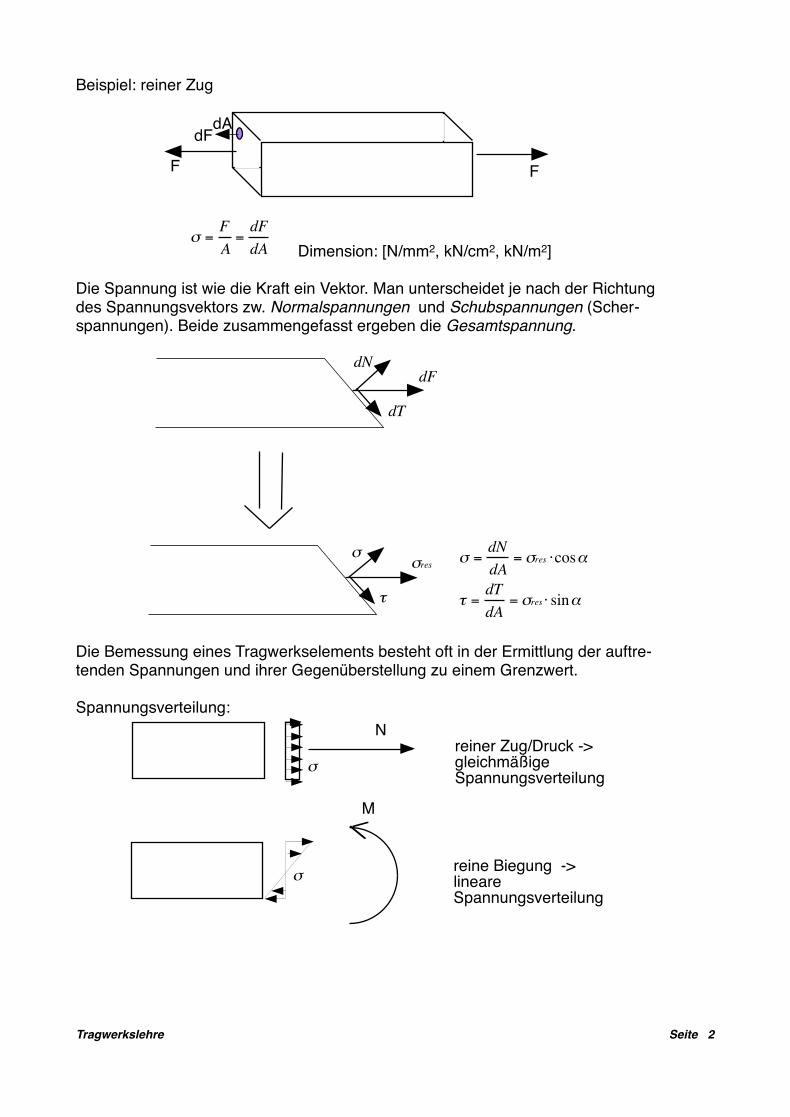
Beispiel: reiner Zug
�
Dimension: [N/mm2, kN/cm2, kN/m2]
Die Spannung ist wie die Kraft ein Vektor. Man unterscheidet je nach der Richtung des Spannungsvektors zw. Normalspannungen und Schubspannungen (Scher-spannungen). Beide zusammengefasst ergeben die Gesamtspannung.
�
Die Bemessung eines Tragwerkselements besteht oft in der Ermittlung der auftre-tenden Spannungen und ihrer Gegenüberstellung zu einem Grenzwert.
Spannungsverteilung:
�
dA
F
dF
F
σ =FA=dFdA
dFdN
dT
σσres
τ
σ =dNdA
= σres ⋅cosα
τ =dTdA
= σres ⋅ sinα
N
σreiner Zug/Druck -> gleichmäßige Spannungsverteilung
σreine Biegung -> lineare Spannungsverteilung
M
Tragwerkslehre Seite �2
�
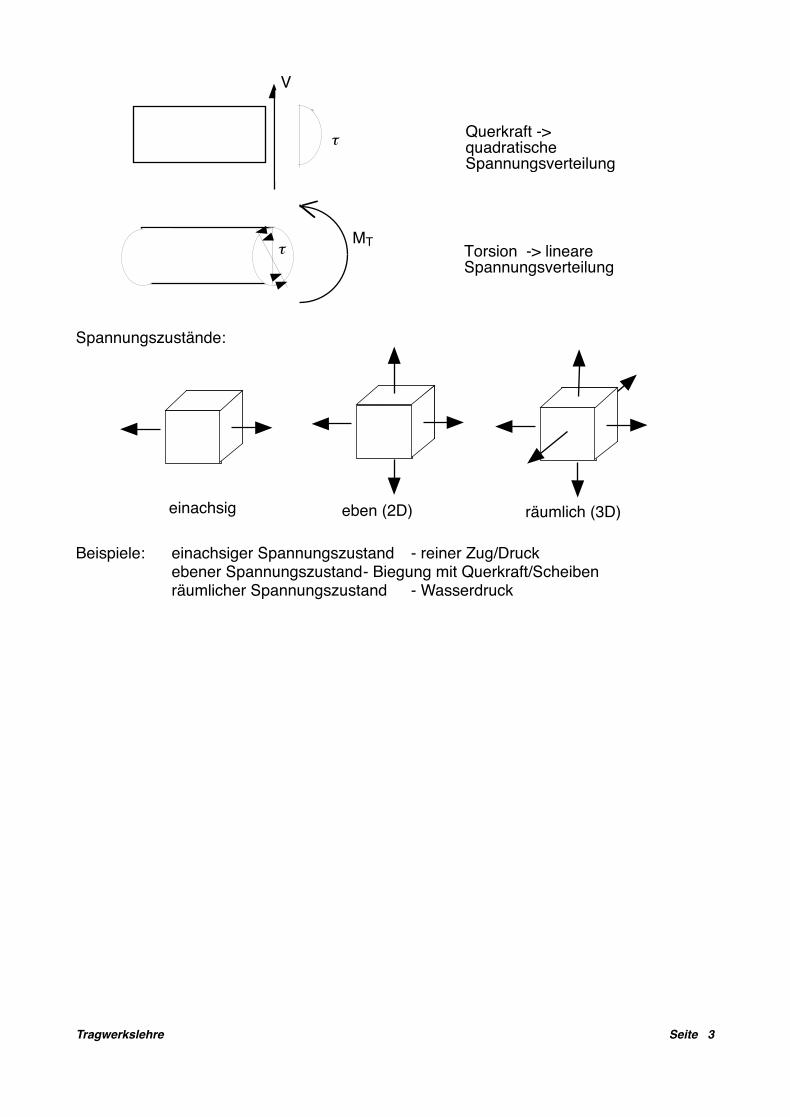
Spannungszustände:
�
Beispiele: einachsiger Spannungszustand - reiner Zug/Druckebener Spannungszustand- Biegung mit Querkraft/Scheibenräumlicher Spannungszustand - Wasserdruck
V
Querkraft -> quadratische Spannungsverteilung
Torsion -> lineare Spannungsverteilung
MT
τ
τ
einachsig eben (2D) räumlich (3D)
Tragwerkslehre Seite �3
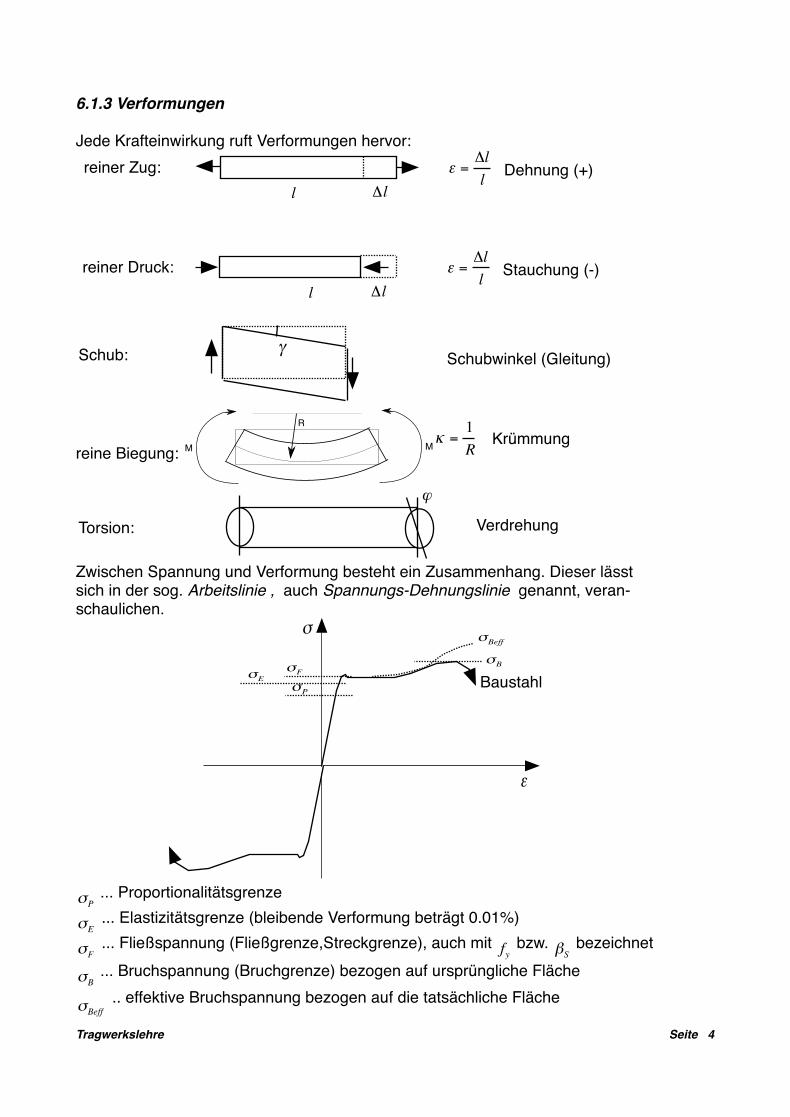
6.1.3 Verformungen
Jede Krafteinwirkung ruft Verformungen hervor:
�Zwischen Spannung und Verformung besteht ein Zusammenhang. Dieser lässt sich in der sog. Arbeitslinie , auch Spannungs-Dehnungslinie genannt, veran-schaulichen.
� ... Proportionalitätsgrenze ... Elastizitätsgrenze (bleibende Verformung beträgt 0.01%) ... Fließspannung (Fließgrenze,Streckgrenze), auch mit bzw. bezeichnet ... Bruchspannung (Bruchgrenze) bezogen auf ursprüngliche Fläche
.. effektive Bruchspannung bezogen auf die tatsächliche Fläche
Δllε =
Δll
reiner Zug: Dehnung (+)
Δllε =
Δll
reiner Druck: Stauchung (-)
reine Biegung:κ =
1R Krümmung
ϕ
Verdrehung Torsion:
Schub: γSchubwinkel (Gleitung)
ε
σ
Baustahl σF
σP
σB
σBeff
σE
σP
σE
σF fy βS
σB
σBeff
Tragwerkslehre Seite �4
R
M M
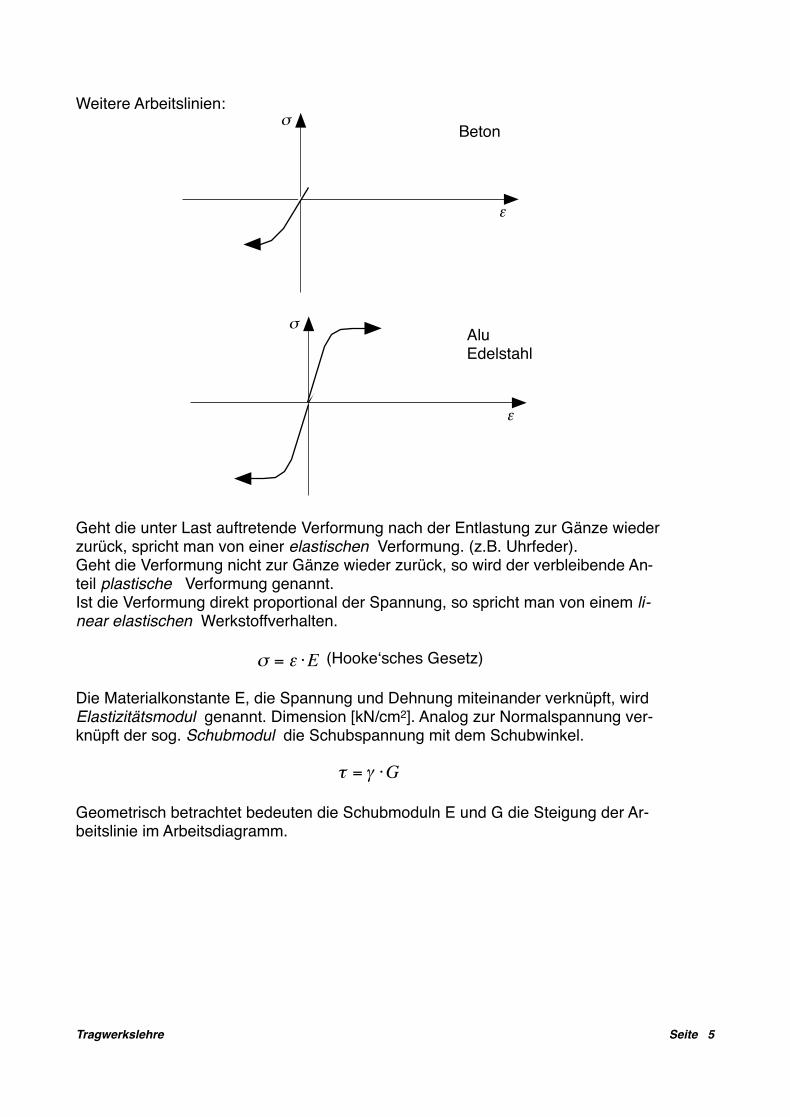
Weitere Arbeitslinien:
�
Geht die unter Last auftretende Verformung nach der Entlastung zur Gänze wieder zurück, spricht man von einer elastischen Verformung. (z.B. Uhrfeder).Geht die Verformung nicht zur Gänze wieder zurück, so wird der verbleibende An-teil plastische Verformung genannt.Ist die Verformung direkt proportional der Spannung, so spricht man von einem li-near elastischen Werkstoffverhalten.
(Hooke‘sches Gesetz)
Die Materialkonstante E, die Spannung und Dehnung miteinander verknüpft, wird Elastizitätsmodul genannt. Dimension [kN/cm2]. Analog zur Normalspannung ver-knüpft der sog. Schubmodul die Schubspannung mit dem Schubwinkel.
�
Geometrisch betrachtet bedeuten die Schubmoduln E und G die Steigung der Ar-beitslinie im Arbeitsdiagramm.
ε
σBeton
ε
σAluEdelstahl
σ = ε ⋅E
τ = γ ⋅G
Tragwerkslehre Seite �5
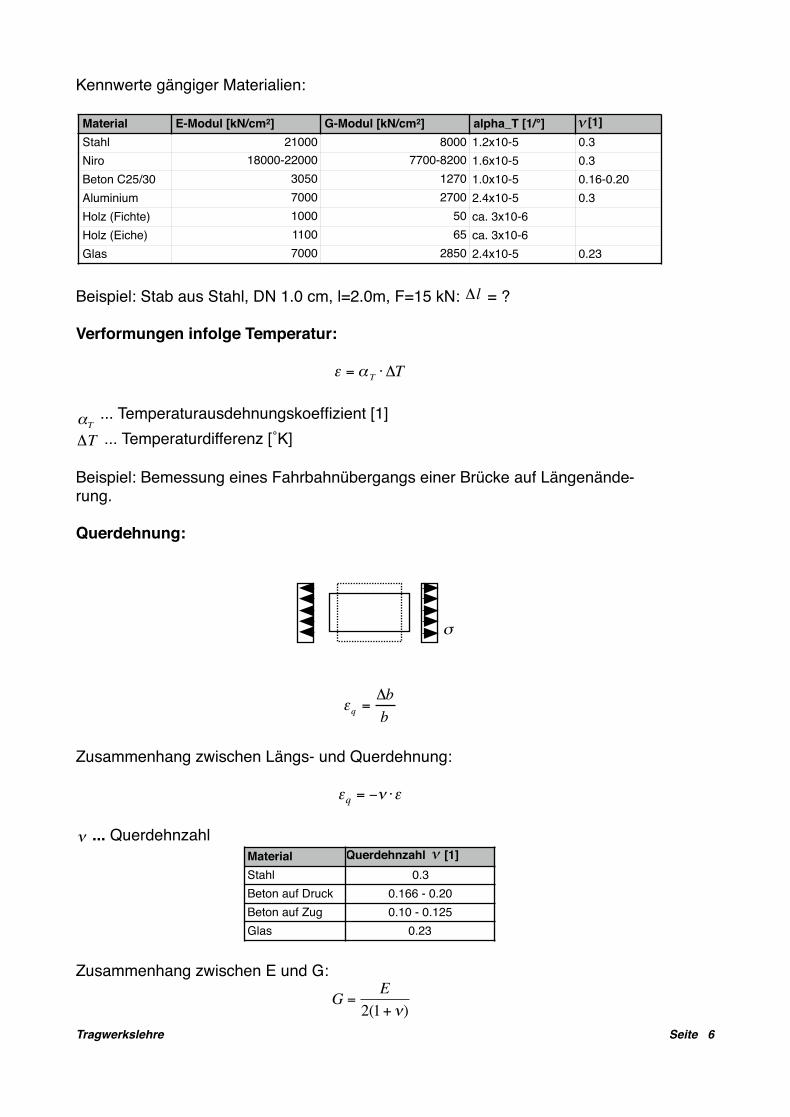
Kennwerte gängiger Materialien:
Beispiel: Stab aus Stahl, DN 1.0 cm, l=2.0m, F=15 kN: = ?
Verformungen infolge Temperatur:
... Temperaturausdehnungskoeffizient [1] ... Temperaturdifferenz [˚K]
Beispiel: Bemessung eines Fahrbahnübergangs einer Brücke auf Längenände-rung.
Querdehnung:
�
Zusammenhang zwischen Längs- und Querdehnung:
�
... Querdehnzahl
Zusammenhang zwischen E und G:�
Material E-Modul [kN/cm2] G-Modul [kN/cm2] alpha_T [1/°]Stahl 21000 8000 1.2x10-5 0.3Niro 18000-22000 7700-8200 1.6x10-5 0.3Beton C25/30 3050 1270 1.0x10-5 0.16-0.20Aluminium 7000 2700 2.4x10-5 0.3Holz (Fichte) 1000 50 ca. 3x10-6Holz (Eiche) 1100 65 ca. 3x10-6Glas 7000 2850 2.4x10-5 0.23
[1]
€
ν
Δl
ε = α T ⋅ ΔT
αT
ΔT
σ
εq =Δbb
€
εq = −ν ⋅ε
€
νMaterialStahl 0.3Beton auf Druck 0.166 - 0.20Beton auf Zug 0.10 - 0.125Glas 0.23
Querdehnzahl � [1]
€
ν
€
G =E
2(1+ ν)Tragwerkslehre Seite �6
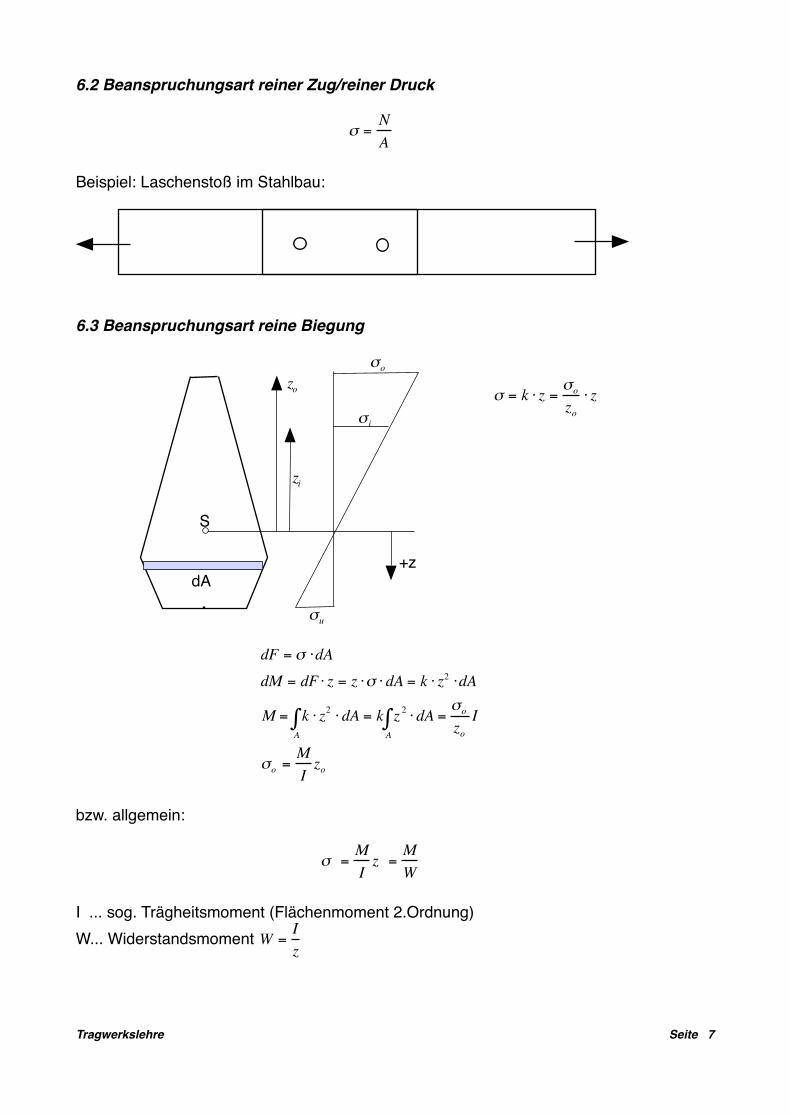
6.2 Beanspruchungsart reiner Zug/reiner Druck
Beispiel: Laschenstoß im Stahlbau:
�
6.3 Beanspruchungsart reine Biegung
�
bzw. allgemein:
I ... sog. Trägheitsmoment (Flächenmoment 2.Ordnung)W... Widerstandsmoment �
σ =NA
+z
σu
σo
S
dA
zo
zi
σ i
σ = k ⋅ z =σo
zo⋅ z
dF = σ ⋅dA
dM = dF ⋅ z = z ⋅σ ⋅ dA = k ⋅ z2 ⋅dA
M = k ⋅ z2 ⋅ dAA∫ = k z 2 ⋅ dA
A∫ =
σo
zoI
σo =MIzo
σ =MIz =
MW
W =Iz
Tragwerkslehre Seite �7
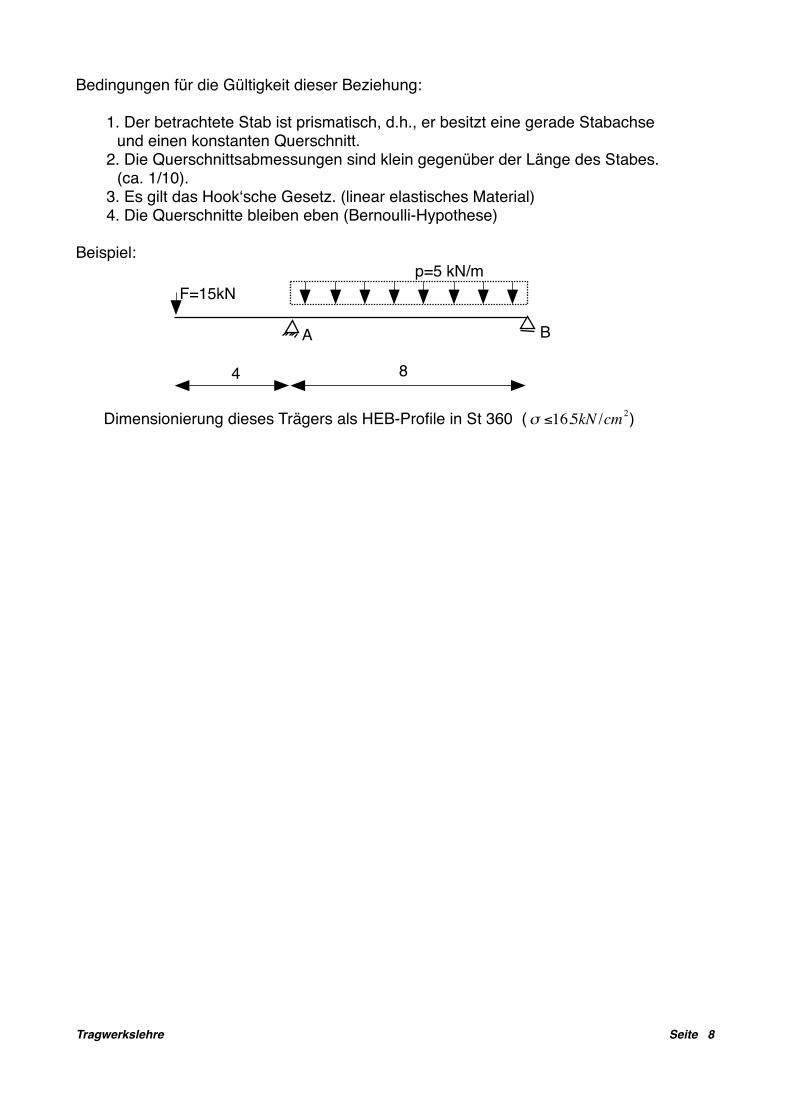
Bedingungen für die Gültigkeit dieser Beziehung:
1. Der betrachtete Stab ist prismatisch, d.h., er besitzt eine gerade Stabachse und einen konstanten Querschnitt.
2. Die Querschnittsabmessungen sind klein gegenüber der Länge des Stabes. (ca. 1/10).
3. Es gilt das Hook‘sche Gesetz. (linear elastisches Material)4. Die Querschnitte bleiben eben (Bernoulli-Hypothese)
Beispiel:
�
Dimensionierung dieses Trägers als HEB-Profile in St 360 (� )
F=15kN
4 8
p=5 kN/m
A B
σ ≤16.5kN /cm2
Tragwerkslehre Seite �8
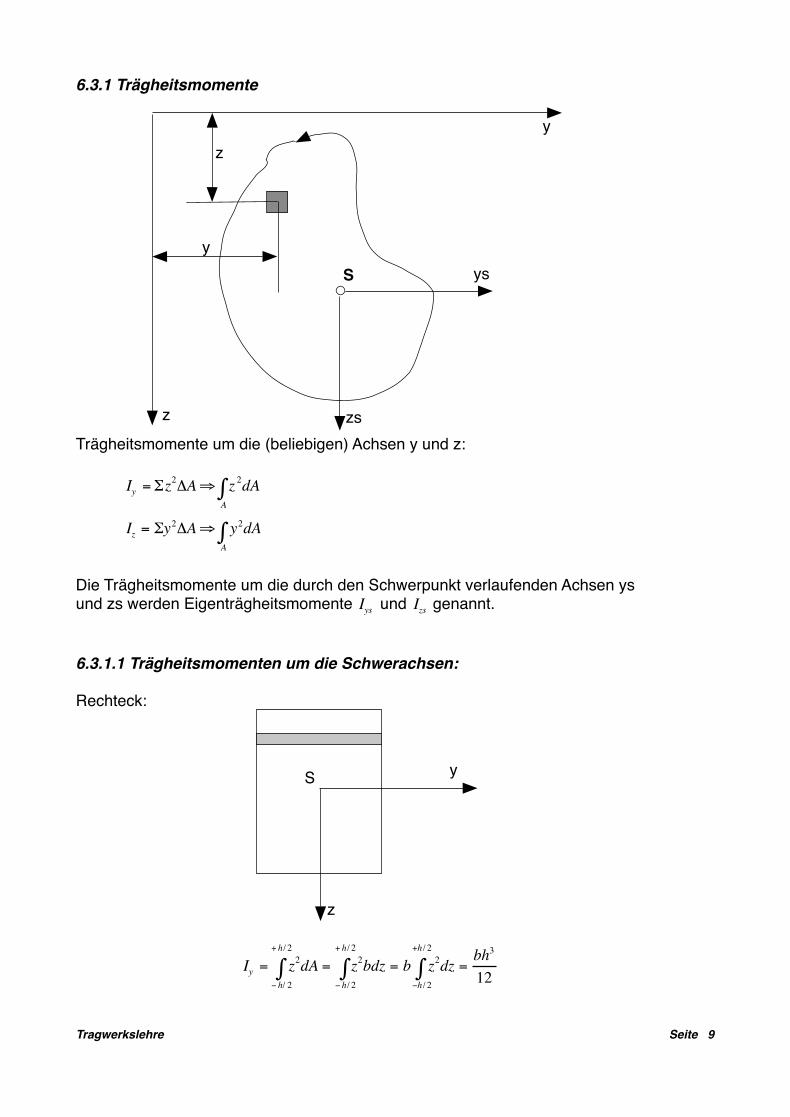
6.3.1 Trägheitsmomente
�Trägheitsmomente um die (beliebigen) Achsen y und z:
Die Trägheitsmomente um die durch den Schwerpunkt verlaufenden Achsen ys und zs werden Eigenträgheitsmomente � und � genannt.
6.3.1.1 Trägheitsmomenten um die Schwerachsen:
Rechteck:
�
y
z
z
yS ys
zs
Iy = Σz2ΔA⇒ z 2dA
A∫
Iz = Σy2ΔA⇒ y2dAA∫
Iys Izs
y
z
S
Iy = z2dA− h/ 2
+ h/ 2
∫ = z2bdz− h/ 2
+ h/ 2
∫ = b z2dz−h / 2
+h / 2
∫ =bh3
12
Tragwerkslehre Seite �9
Quadrat:
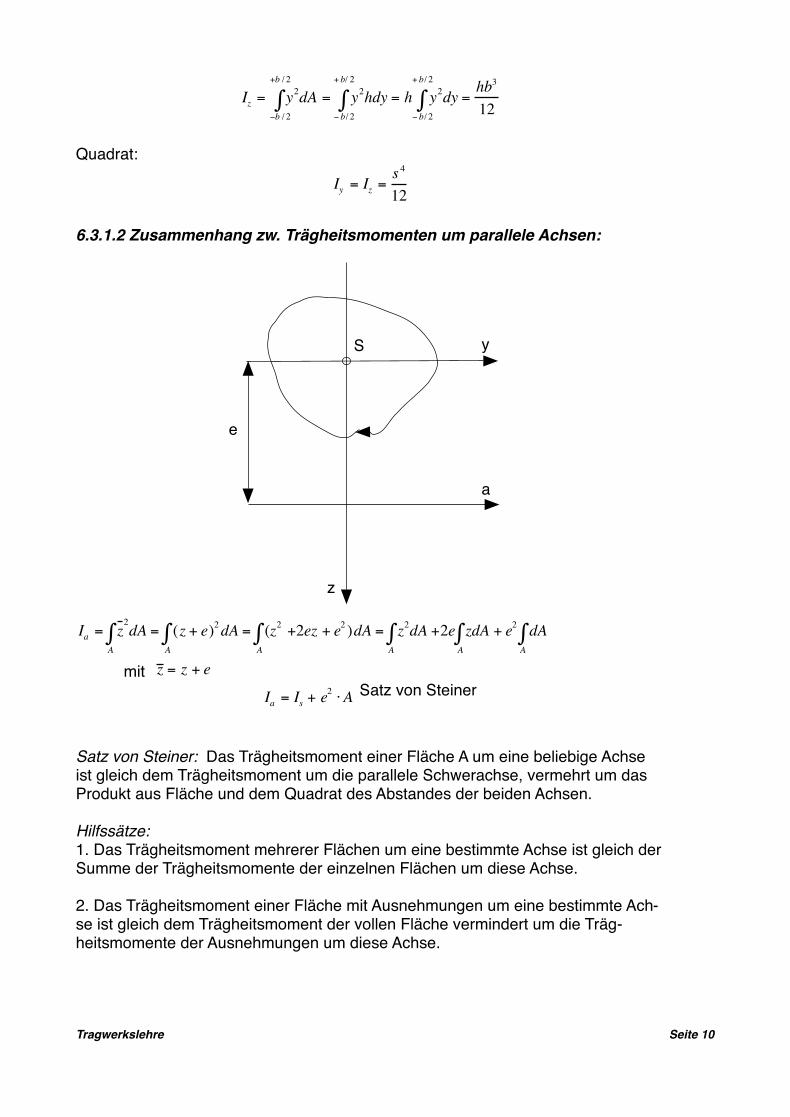
6.3.1.2 Zusammenhang zw. Trägheitsmomenten um parallele Achsen:
�
mit
Satz von Steiner
Satz von Steiner: Das Trägheitsmoment einer Fläche A um eine beliebige Achse ist gleich dem Trägheitsmoment um die parallele Schwerachse, vermehrt um das Produkt aus Fläche und dem Quadrat des Abstandes der beiden Achsen.
Hilfssätze:1. Das Trägheitsmoment mehrerer Flächen um eine bestimmte Achse ist gleich der Summe der Trägheitsmomente der einzelnen Flächen um diese Achse.
2. Das Trägheitsmoment einer Fläche mit Ausnehmungen um eine bestimmte Ach-se ist gleich dem Trägheitsmoment der vollen Fläche vermindert um die Träg-heitsmomente der Ausnehmungen um diese Achse.
Iz = y2dA−b / 2
+b / 2
∫ = y2hdy− b/ 2
+ b/ 2
∫ = h y2dy− b/ 2
+ b/ 2
∫ =hb3
12
Iy = Iz =s 4
12
y
z
a
S
e
Ia = z2dAA∫ = (z + e)2dA
A∫ = (z2 +2ez + e2 )dA
A∫ = z2dA +2e zdA
A∫
A∫ + e2 dA
A∫
z = z + e
Ia = Is + e2 ⋅A
Tragwerkslehre Seite �10
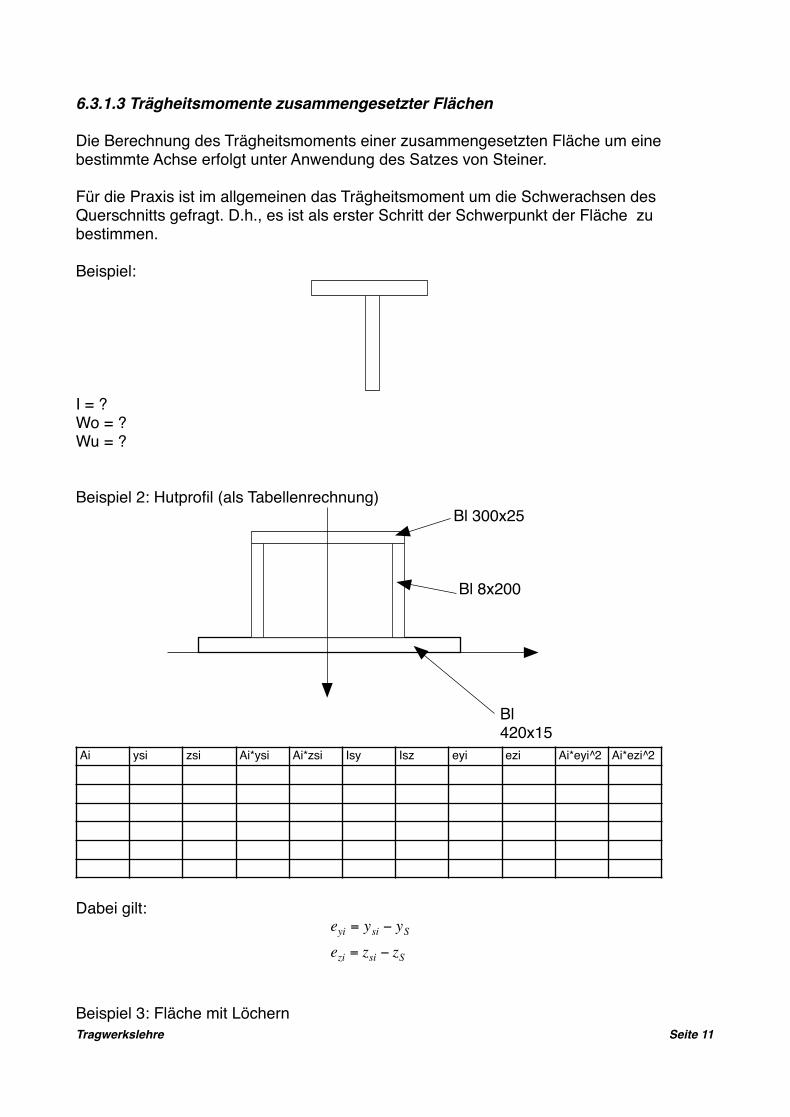
6.3.1.3 Trägheitsmomente zusammengesetzter Flächen
Die Berechnung des Trägheitsmoments einer zusammengesetzten Fläche um eine bestimmte Achse erfolgt unter Anwendung des Satzes von Steiner.
Für die Praxis ist im allgemeinen das Trägheitsmoment um die Schwerachsen des Querschnitts gefragt. D.h., es ist als erster Schritt der Schwerpunkt der Fläche zu bestimmen.
Beispiel:
�I = ?Wo = ?Wu = ?
Beispiel 2: Hutprofil (als Tabellenrechnung)
�
Dabei gilt:
Beispiel 3: Fläche mit Löchern
Bl 420x15
Bl 8x200
Bl 300x25
Ai ysi zsi Ai*ysi Ai*zsi Isy Isz eyi ezi Ai*eyi^2 Ai*ezi^2
€
eyi = ysi − ySezi = zsi − zS
Tragwerkslehre Seite �11
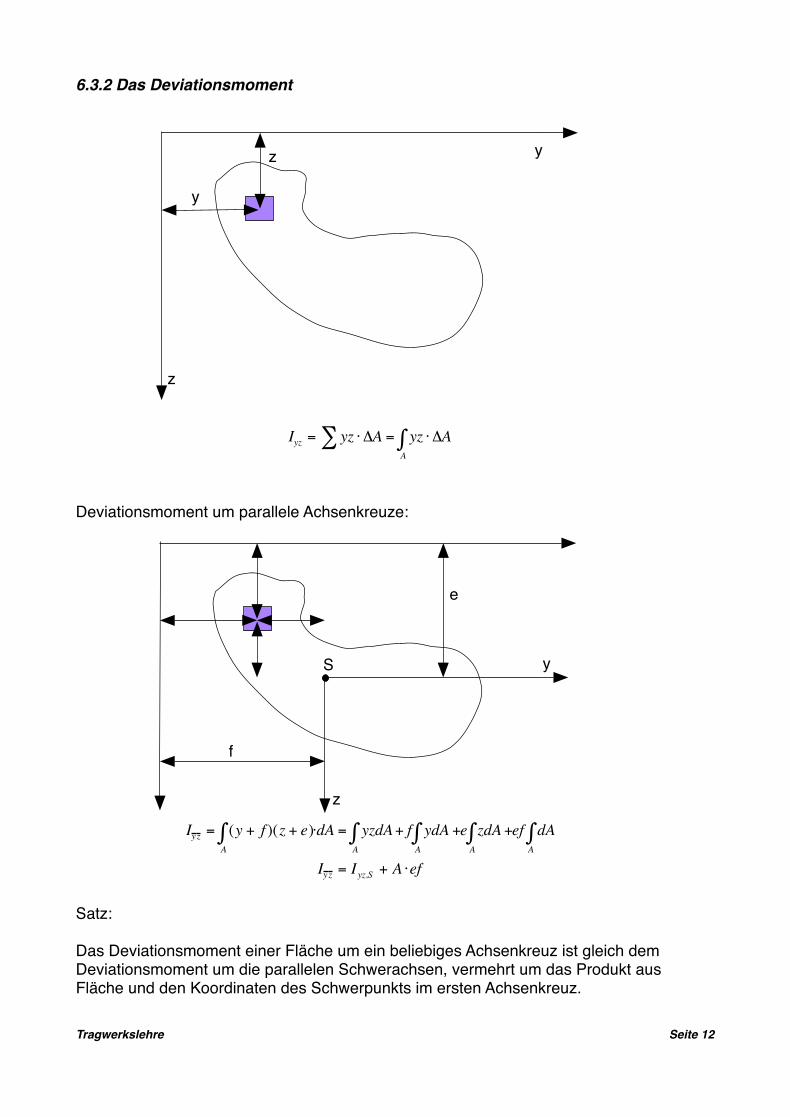
6.3.2 Das Deviationsmoment
�
Deviationsmoment um parallele Achsenkreuze:
�
Satz:
Das Deviationsmoment einer Fläche um ein beliebiges Achsenkreuz ist gleich dem Deviationsmoment um die parallelen Schwerachsen, vermehrt um das Produkt aus Fläche und den Koordinaten des Schwerpunkts im ersten Achsenkreuz.
y
z y
z
Iyz = yz ⋅ ΔA∑ = yz ⋅ ΔAA∫
y
z
S
e
f
Iy z = (y + f )(z + e)⋅dAA∫ = yzdA+
A∫ f ydA +
A∫ e zdA +
A∫ ef dA
A∫
Iy z = Iyz,S + A ⋅ef
Tragwerkslehre Seite �12
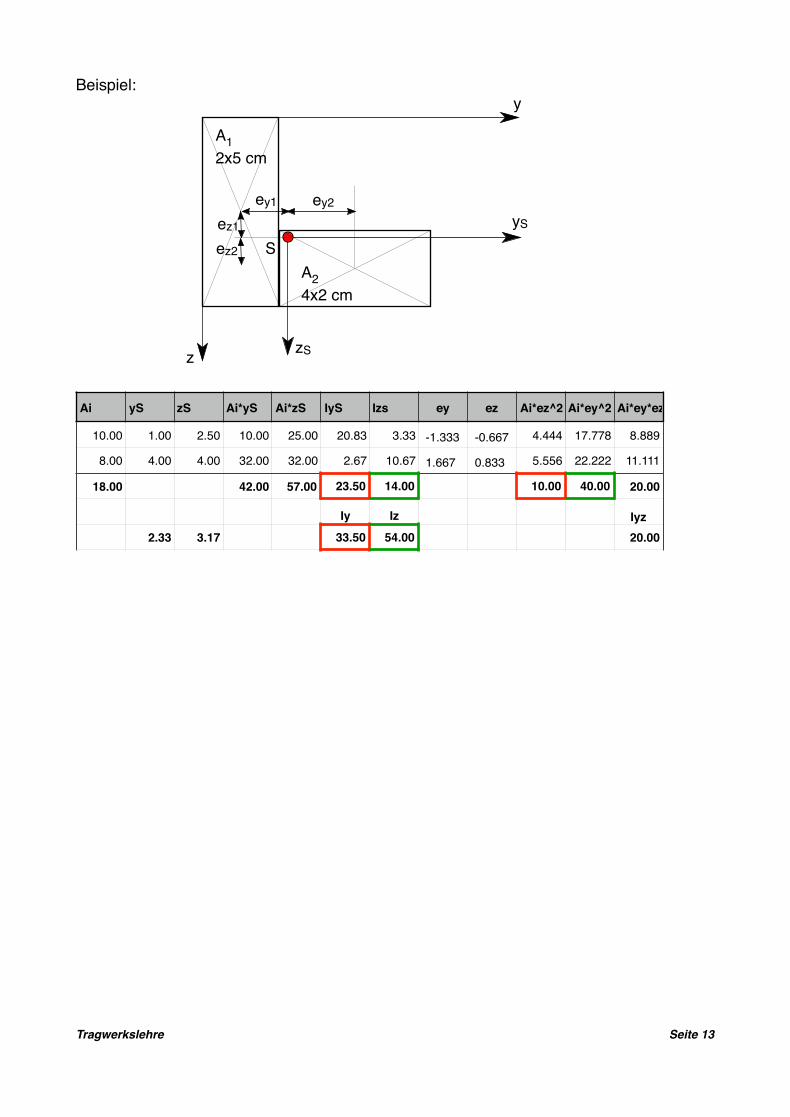
Beispiel:
� z
y
A12x5 cm
A24x2 cm
yS
zS
Sez1
ey1 ey2
ez2
Ai yS zS Ai*yS Ai*zS IyS Izs ey ez Ai*ez^2 Ai*ey^2 Ai*ey*ez
10.00 1.00 2.50 10.00 25.00 20.83 3.33 -1.333 -0.667 4.444 17.778 8.889
8.00 4.00 4.00 32.00 32.00 2.67 10.67 1.667 0.833 5.556 22.222 11.111
18.00 42.00 57.00 23.50 14.00 10.00 40.00 20.00
Iy Iz Iyz2.33 3.17 33.50 54.00 20.00
Tragwerkslehre Seite �13
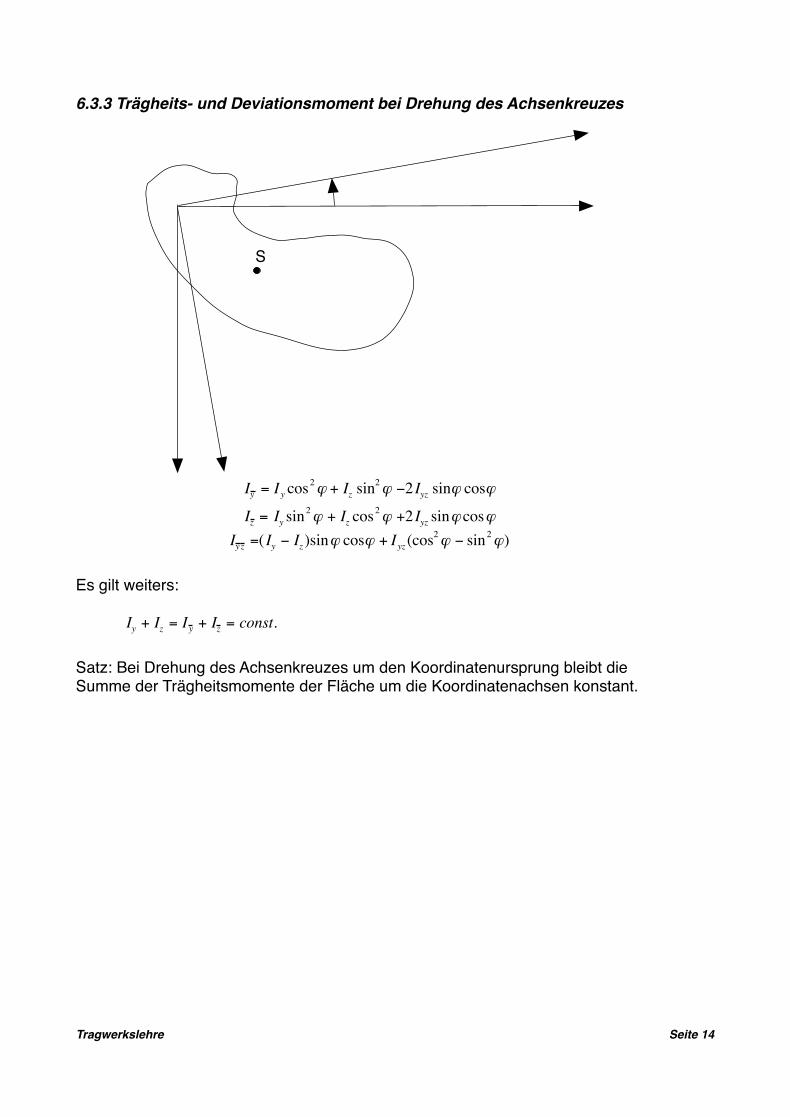
6.3.3 Trägheits- und Deviationsmoment bei Drehung des Achsenkreuzes
�
�
Es gilt weiters:
Satz: Bei Drehung des Achsenkreuzes um den Koordinatenursprung bleibt die Summe der Trägheitsmomente der Fläche um die Koordinatenachsen konstant.
S
Iy = Iy cos2ϕ + Iz sin
2ϕ −2 Iyz sinϕ cosϕ
Iz = Iy sin2ϕ + Iz cos
2ϕ +2 Iyz sinϕ cosϕIy z =( Iy − Iz )sinϕ cosϕ + Iyz(cos
2ϕ − sin2ϕ)
Iy + Iz = Iy + Iz = const.
Tragwerkslehre Seite �14
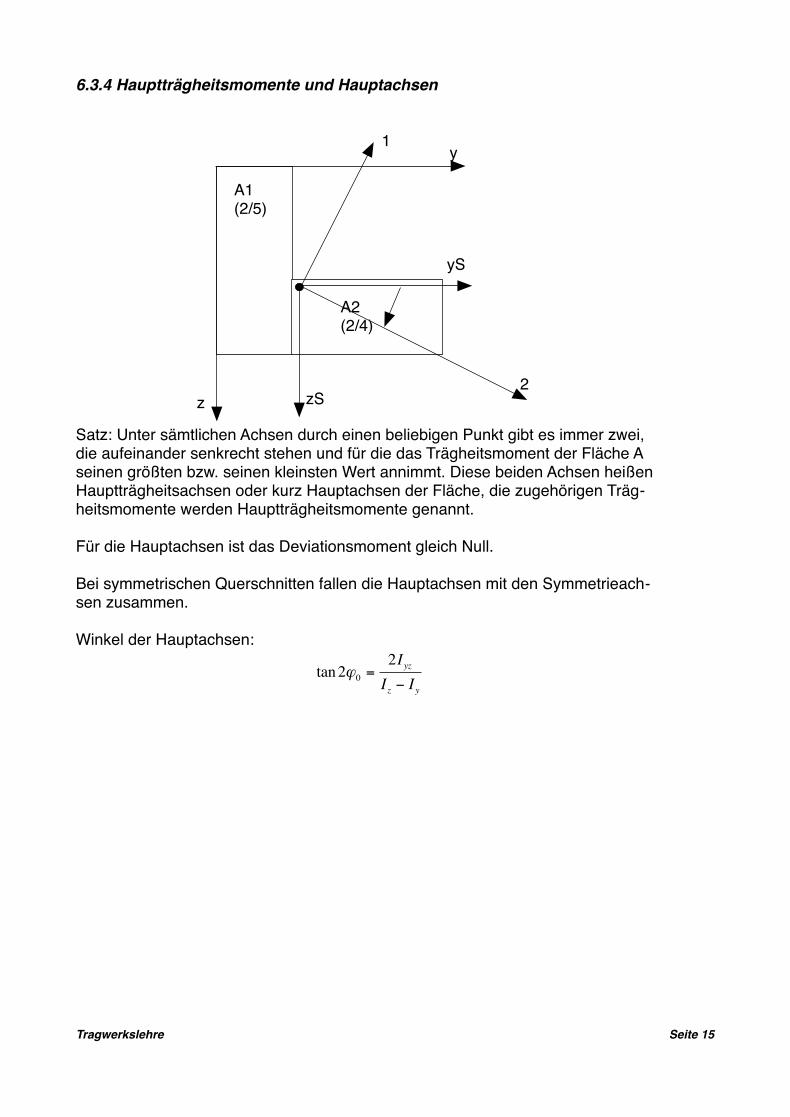
6.3.4 Hauptträgheitsmomente und Hauptachsen
�Satz: Unter sämtlichen Achsen durch einen beliebigen Punkt gibt es immer zwei, die aufeinander senkrecht stehen und für die das Trägheitsmoment der Fläche A seinen größten bzw. seinen kleinsten Wert annimmt. Diese beiden Achsen heißen Hauptträgheitsachsen oder kurz Hauptachsen der Fläche, die zugehörigen Träg-heitsmomente werden Hauptträgheitsmomente genannt.
Für die Hauptachsen ist das Deviationsmoment gleich Null.
Bei symmetrischen Querschnitten fallen die Hauptachsen mit den Symmetrieach-sen zusammen.
Winkel der Hauptachsen:
�
y
z
A1(2/5)
A2(2/4)
zS
yS
1
2
tan2ϕ0 =2IyzIz − Iy
Tragwerkslehre Seite �15
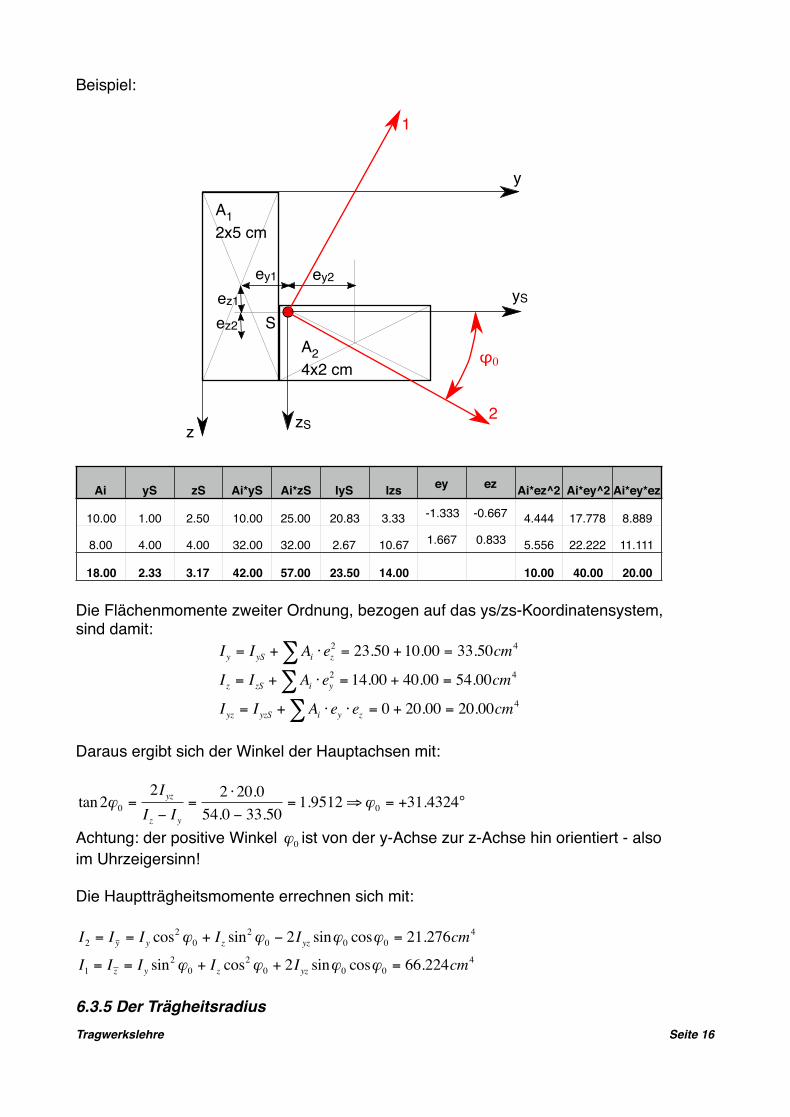
Beispiel:
�
Die Flächenmomente zweiter Ordnung, bezogen auf das ys/zs-Koordinatensystem, sind damit:
�
Daraus ergibt sich der Winkel der Hauptachsen mit:
�
Achtung: der positive Winkel � ist von der y-Achse zur z-Achse hin orientiert - also im Uhrzeigersinn!
Die Hauptträgheitsmomente errechnen sich mit:
�
6.3.5 Der Trägheitsradius
z
y
A12x5 cm
A24x2 cm
yS
zS
Sez1
ey1 ey2
ez2
1
φ0
2
Ai yS zS Ai*yS Ai*zS IyS Izs ey ez Ai*ez^2 Ai*ey^2 Ai*ey*ez
10.00 1.00 2.50 10.00 25.00 20.83 3.33 -1.333 -0.667 4.444 17.778 8.889
8.00 4.00 4.00 32.00 32.00 2.67 10.67 1.667 0.833 5.556 22.222 11.111
18.00 2.33 3.17 42.00 57.00 23.50 14.00 10.00 40.00 20.00
Iy = IyS + Ai ⋅ ez2∑ = 23.50 +10.00 = 33.50cm4
Iz = IzS + Ai ⋅ ey2∑ = 14.00 + 40.00 = 54.00cm4
Iyz = IyzS + Ai ⋅ ey ⋅ ez∑ = 0 + 20.00 = 20.00cm4
tan2ϕ0 =2IyzIz − Iy
=2 ⋅20.0
54.0 − 33.50= 1.9512⇒ϕ0 = +31.4324°
ϕ0
I2 = Iy = Iy cos2ϕ0 + Iz sin
2ϕ0 − 2Iyz sinϕ0 cosϕ0 = 21.276cm4
I1 = Iz = Iy sin2ϕ0 + Iz cos
2ϕ0 + 2Iyz sinϕ0 cosϕ0 = 66.224cm4
Tragwerkslehre Seite �16
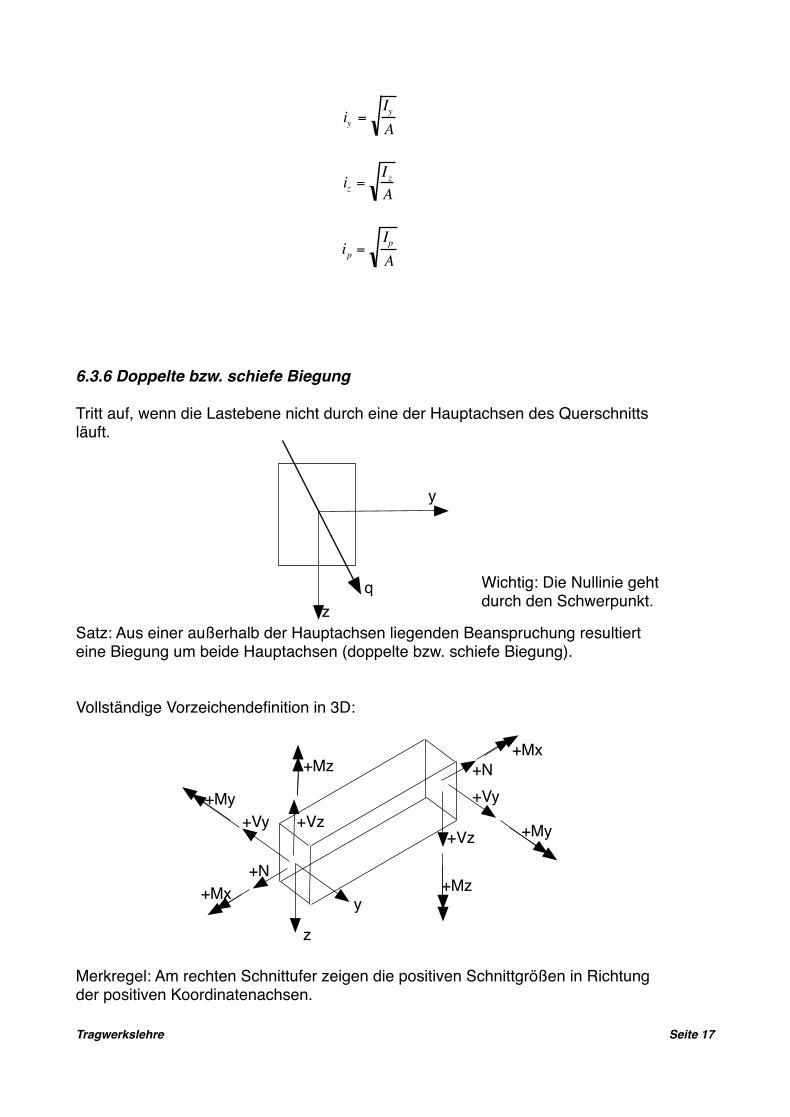
6.3.6 Doppelte bzw. schiefe Biegung
Tritt auf, wenn die Lastebene nicht durch eine der Hauptachsen des Querschnitts läuft.
�Satz: Aus einer außerhalb der Hauptachsen liegenden Beanspruchung resultiert eine Biegung um beide Hauptachsen (doppelte bzw. schiefe Biegung).
Vollständige Vorzeichendefinition in 3D:
�
Merkregel: Am rechten Schnittufer zeigen die positiven Schnittgrößen in Richtung der positiven Koordinatenachsen.
iy =IyA
iz =IzA
ip =IpA
y
zq
z
y
+N
+N+Mx
+Mx
+Vy+Vy
+Vz+Vz +My
+My
+Mz
+Mz
Tragwerkslehre Seite �17
Wichtig: Die Nullinie geht durch den Schwerpunkt.
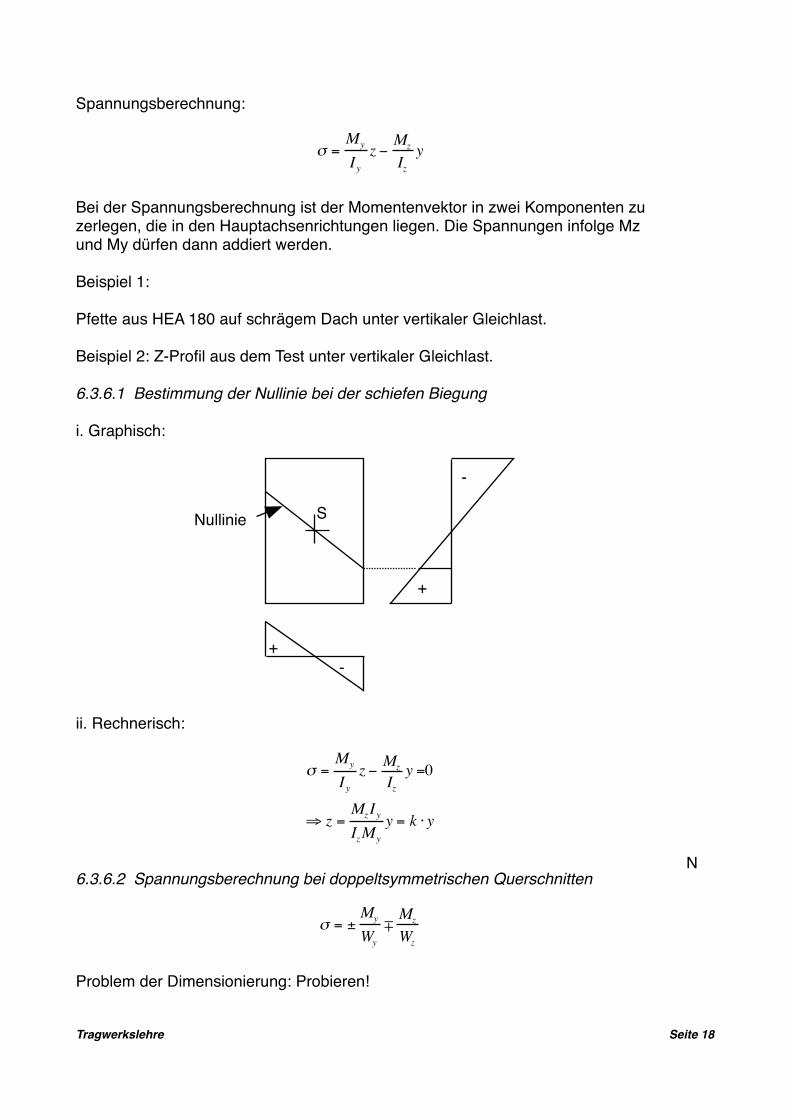
Spannungsberechnung:
Bei der Spannungsberechnung ist der Momentenvektor in zwei Komponenten zu zerlegen, die in den Hauptachsenrichtungen liegen. Die Spannungen infolge Mz und My dürfen dann addiert werden.
Beispiel 1:
Pfette aus HEA 180 auf schrägem Dach unter vertikaler Gleichlast.
Beispiel 2: Z-Profil aus dem Test unter vertikaler Gleichlast.
6.3.6.1 Bestimmung der Nullinie bei der schiefen Biegung
i. Graphisch:
�
ii. Rechnerisch:
6.3.6.2 Spannungsberechnung bei doppeltsymmetrischen Querschnitten
Problem der Dimensionierung: Probieren!
σ =My
Iyz − Mz
Izy
+-
+
-
SNullinie
σ =My
Iyz − Mz
Izy =0
⇒ z =MzIyIzMy
y = k ⋅ y
σ = ±
My
Wy
∓Mz
Wz
Tragwerkslehre Seite �18
N
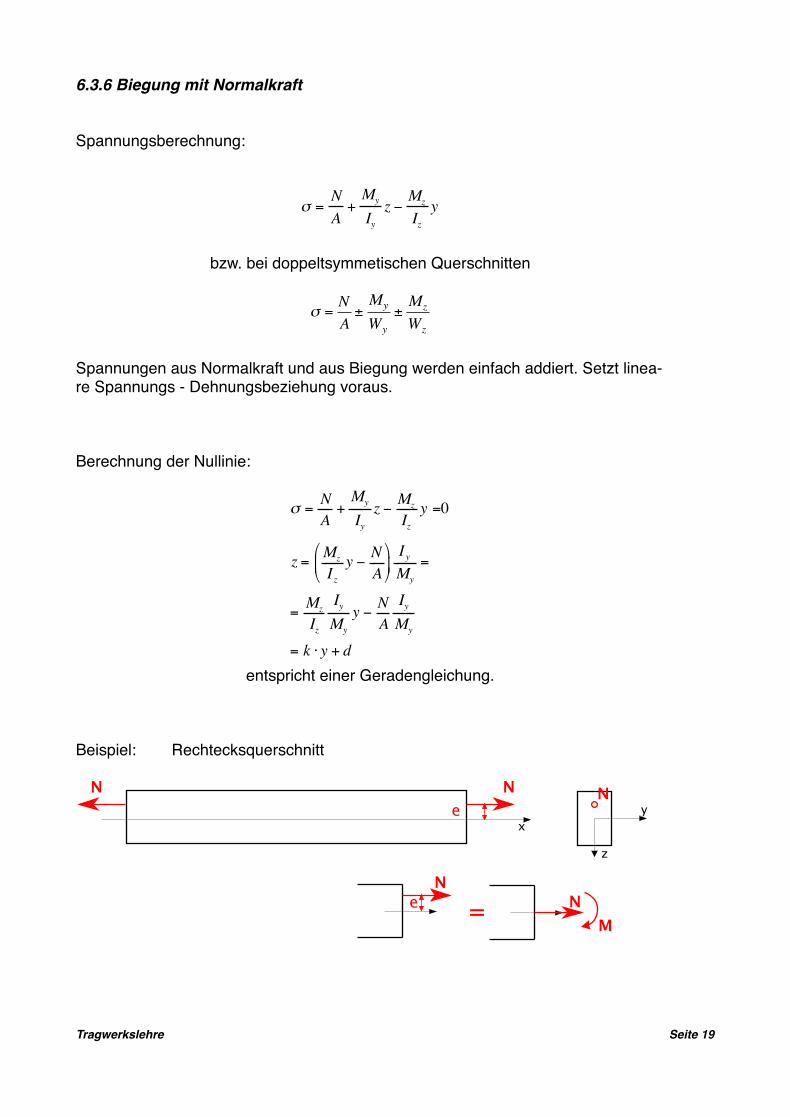
6.3.6 Biegung mit Normalkraft
Spannungsberechnung:
bzw. bei doppeltsymmetischen Querschnitten
Spannungen aus Normalkraft und aus Biegung werden einfach addiert. Setzt linea-re Spannungs - Dehnungsbeziehung voraus.
Berechnung der Nullinie:
entspricht einer Geradengleichung.
Beispiel: Rechtecksquerschnitt
�
σ =NA+My
Iyz − Mz
Izy
€
σ =NA
±My
Wy±Mz
Wz
σ =NA
+My
Iyz − Mz
Izy =0
z =Mz
Izy − N
A⎛
⎝ ⎜
⎞
⎠ ⎟ IyMy
=
=Mz
Iz
IyMy
y − NA
IyMy
= k ⋅ y + d
xy
z
N N Ne
Ne = N
M
Tragwerkslehre Seite �19

6.3.8 AK Biegung und Längskraft
6.3.8.1 Querschnittswerte spezieller Querschnitte
Rechteck:
Quadrat:
Kreis:
dickwandiges Rohr :
dünnwandiges Rohr:
weitere Flächen: siehe Literatur, z.B. Sträußler, Schneider Bautabellen .....
A = bh I = bh3
12W =
bh2
6
A = s2 I = s4
12W =
s3
6
A = r2 π I = r 4π4
W =r3π4
A =(R2 − r2 )π I = (R4 − r4 )π4
W =(R4 − r 4 )π
4R
A = π ⋅ t ⋅ dm I = t ⋅ dm3π8
W =t ⋅ dm2π4
Tragwerkslehre Seite �20
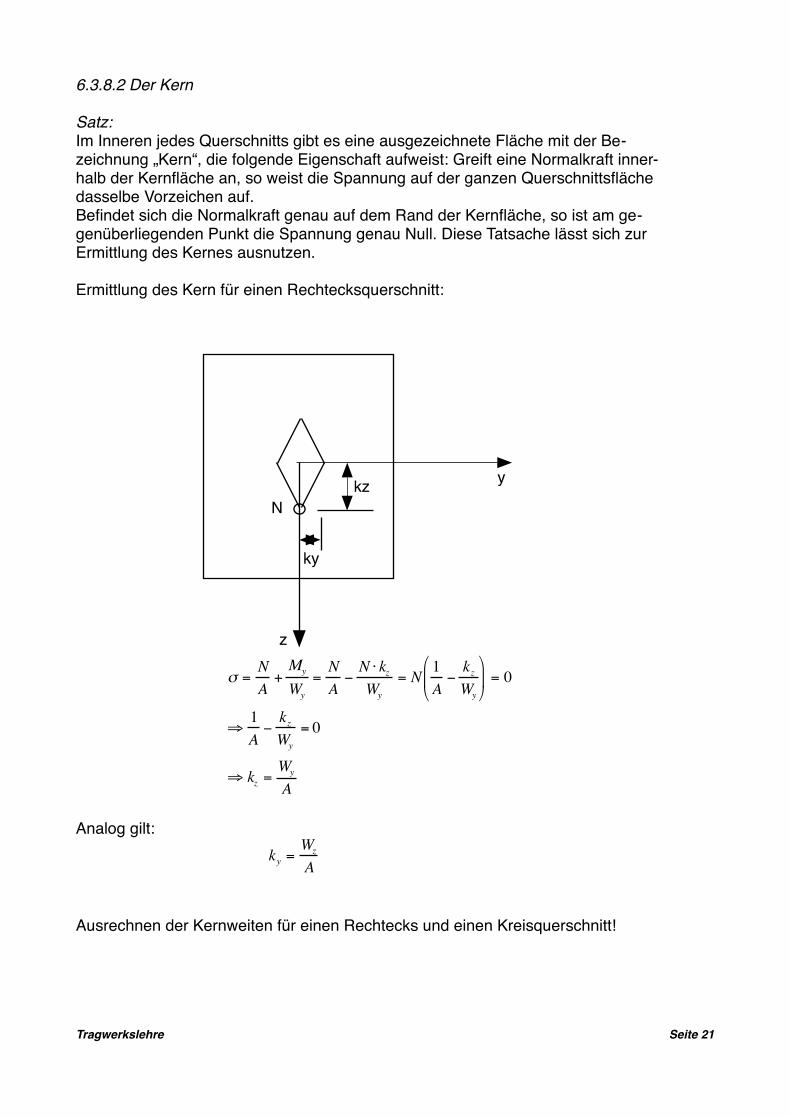
6.3.8.2 Der Kern
Satz: Im Inneren jedes Querschnitts gibt es eine ausgezeichnete Fläche mit der Be-zeichnung „Kern“, die folgende Eigenschaft aufweist: Greift eine Normalkraft inner-halb der Kernfläche an, so weist die Spannung auf der ganzen Querschnittsfläche dasselbe Vorzeichen auf. Befindet sich die Normalkraft genau auf dem Rand der Kernfläche, so ist am ge-genüberliegenden Punkt die Spannung genau Null. Diese Tatsache lässt sich zur Ermittlung des Kernes ausnutzen.
Ermittlung des Kern für einen Rechtecksquerschnitt:
�
Analog gilt:
Ausrechnen der Kernweiten für einen Rechtecks und einen Kreisquerschnitt!
y
z
kz
ky
N
σ =NA
+My
Wy
=NA−N ⋅ kzWy
= N 1A−kzWy
⎛
⎝ ⎜
⎞
⎠ ⎟ = 0
⇒1A−kzWy
= 0
⇒ kz =Wy
A
ky =Wz
A
Tragwerkslehre Seite �21

6.3.7.3 Berechnung der Biegespannungen ohne Kenntnis der Hauptachsen
Die Berechnung der Biegespannungen wird besonders übersichtlich, wenn sie im Hauptachsenkreuz erfolgt. Daher ist es zweckmäßig und üblich, dieses zunächst zu bestimmen. Eine direkte Berechnung der Biegespannungen in einem beliebigen Achsenkreuz ist jedoch ebenfalls möglich, allerdings ist der Formelapparat etwas umfangreicher.
σ =NA+Iz ⋅ z − Iyz ⋅ yIy ⋅ Iz − Iyz
2 My −Iy ⋅ y− Iyz ⋅ zIy ⋅ Iz − Iyz
2 Mz
Tragwerkslehre Seite �22
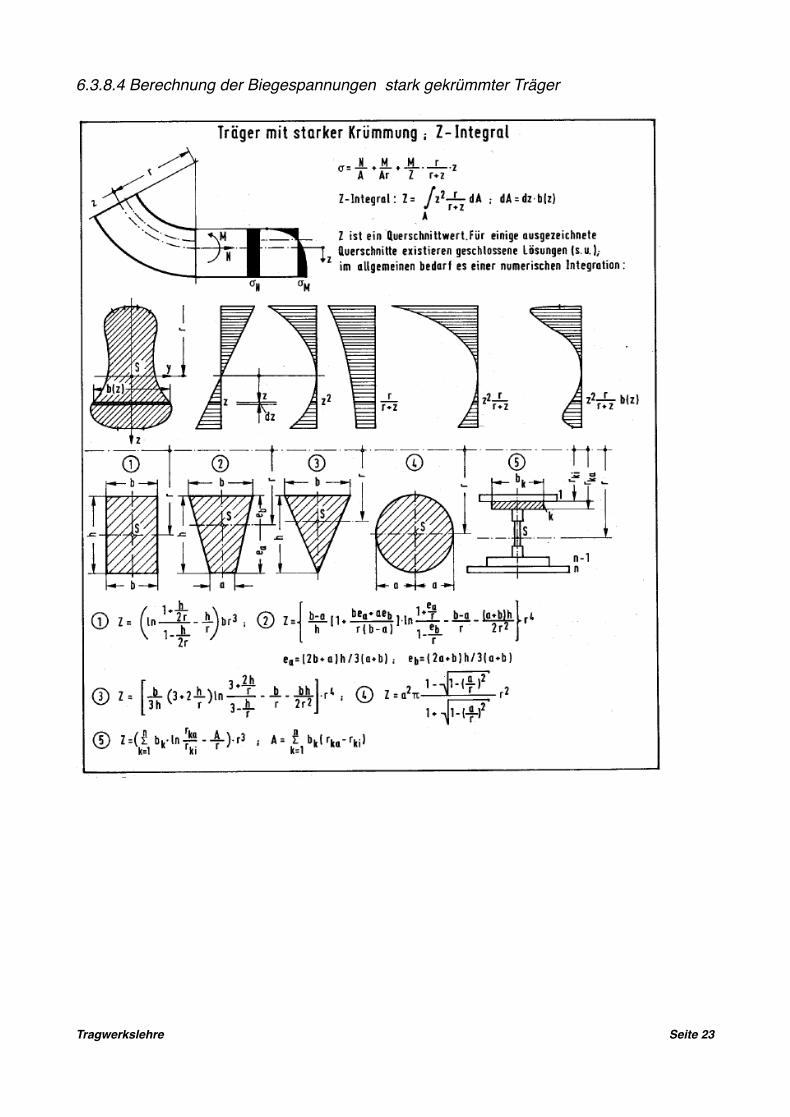
6.3.8.4 Berechnung der Biegespannungen stark gekrümmter Träger
�
Tragwerkslehre Seite �23
6.4 Beanspruchungsart Abscheren und Schub
6.4.1 Abscheren
Von Scherspannungen spricht man, wenn ein Querschnitt in seiner Ebene bean-sprucht wird, ohne dass gleichzeitig eine Biegung auftritt. D.h., Druck und Gegen-druck liegen in derselben Ebene. Typisches Beispiel: Schraubenverbindung
Die Scherspannung ist gleichmäßig über den Querschnitt verteilt:
Beispiel: Schraubverbindung
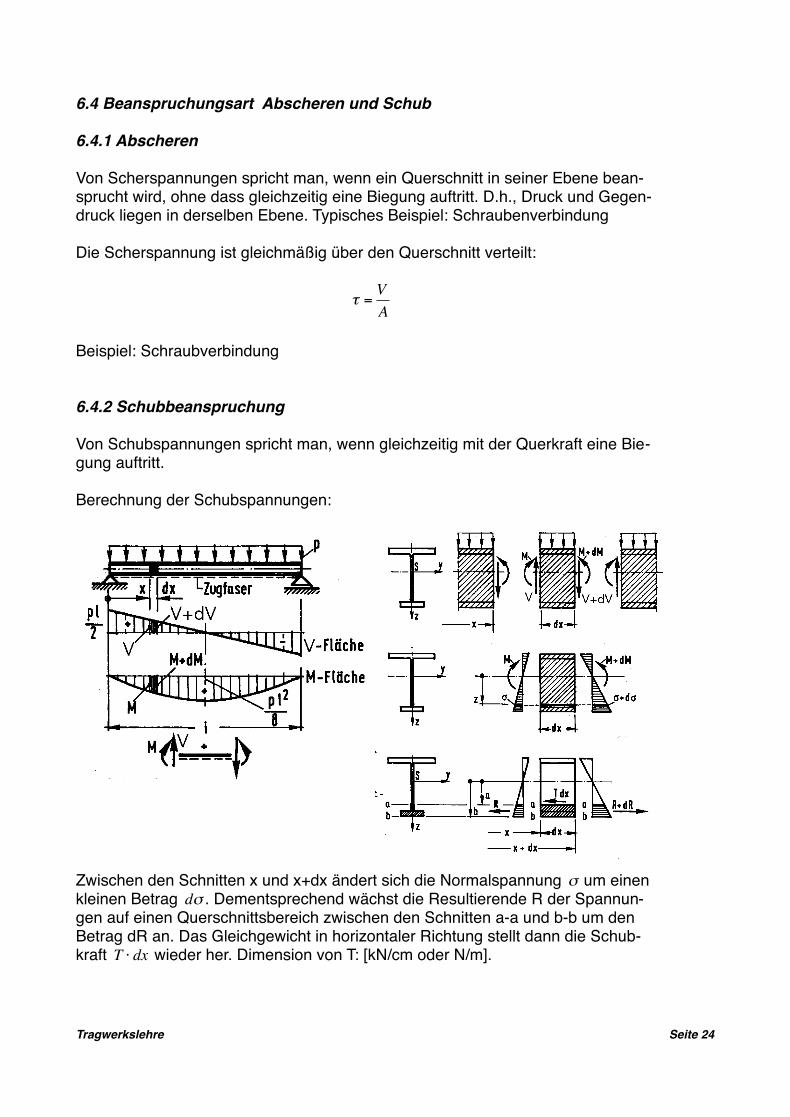
6.4.2 Schubbeanspruchung
Von Schubspannungen spricht man, wenn gleichzeitig mit der Querkraft eine Bie-gung auftritt.
Berechnung der Schubspannungen:
�Zwischen den Schnitten x und x+dx ändert sich die Normalspannung � um einen kleinen Betrag � . Dementsprechend wächst die Resultierende R der Spannun-gen auf einen Querschnittsbereich zwischen den Schnitten a-a und b-b um den Betrag dR an. Das Gleichgewicht in horizontaler Richtung stellt dann die Schub-kraft � wieder her. Dimension von T: [kN/cm oder N/m].
€
τ =VA
€
σ
€
dσ
€
T ⋅ dx
Tragwerkslehre Seite �24
Es gilt:
S ist dabei das auf die Schwerachse des Querschnitts bezogene statische Moment des außerhalb des Schnitts a-a liegenden Flächenstücks.
Weiters ist:
Für das Gleichgewicht des unterhalb des Schnitts a-a befindlichen Flächenteils gilt:
mit der Beziehung � ergibt sich die Schubkraft zu
Die Schubspannung mit gleich der Wandstärke im Schnitt a-a ergibt sich
mit:
Da das statische Moment S dann ein Maximum wird, wenn der Schnitt a-a durch den Schwerpunkt des Querschnitts geht, tritt also die maximale Schubspannung im Schwerpunkt auf!
Für I-Profile kann dieses Maximum in guter Näherung nach der Formel
berechnet werden.Die maximale Schubspannung bei einem Rechtecksquerschnitt beträgt:
€
R = σdAa
b
∫ =MI
zdAa
b
∫ = M SI
€
dR = dM SI
€
Fx∑ = 0
R − (R + dR) + T ⋅ dx = 0⇒ T =dRdx
€
V =dMdx
€
T =dRdx
=dMdx
⋅SI
=V SI
€
τ =Tt
€
t
€
τ =V ⋅ SI ⋅ t
€
τ =VASteg
€
τ =1.5 VA
Tragwerkslehre Seite �25
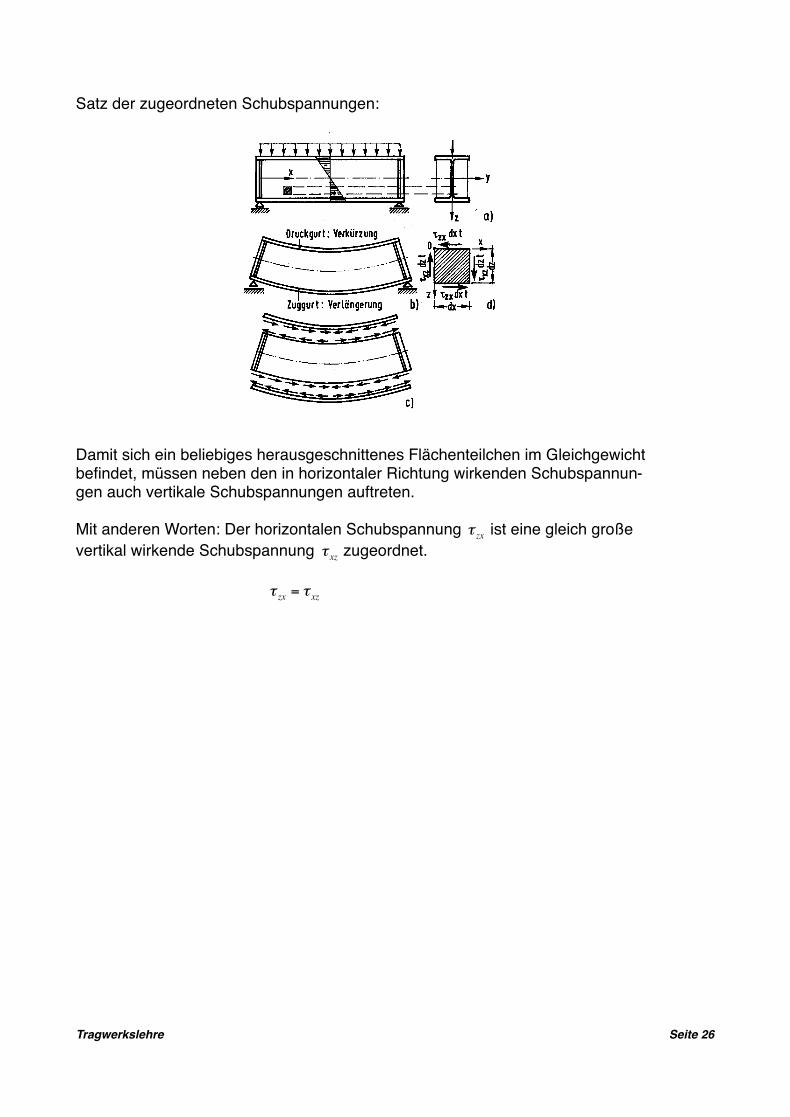
Satz der zugeordneten Schubspannungen:
�
Damit sich ein beliebiges herausgeschnittenes Flächenteilchen im Gleichgewicht befindet, müssen neben den in horizontaler Richtung wirkenden Schubspannun-gen auch vertikale Schubspannungen auftreten.
Mit anderen Worten: Der horizontalen Schubspannung � ist eine gleich große vertikal wirkende Schubspannung � zugeordnet.
€
τ zx
€
τ xz
€
τ zx = τ xz
Tragwerkslehre Seite �26
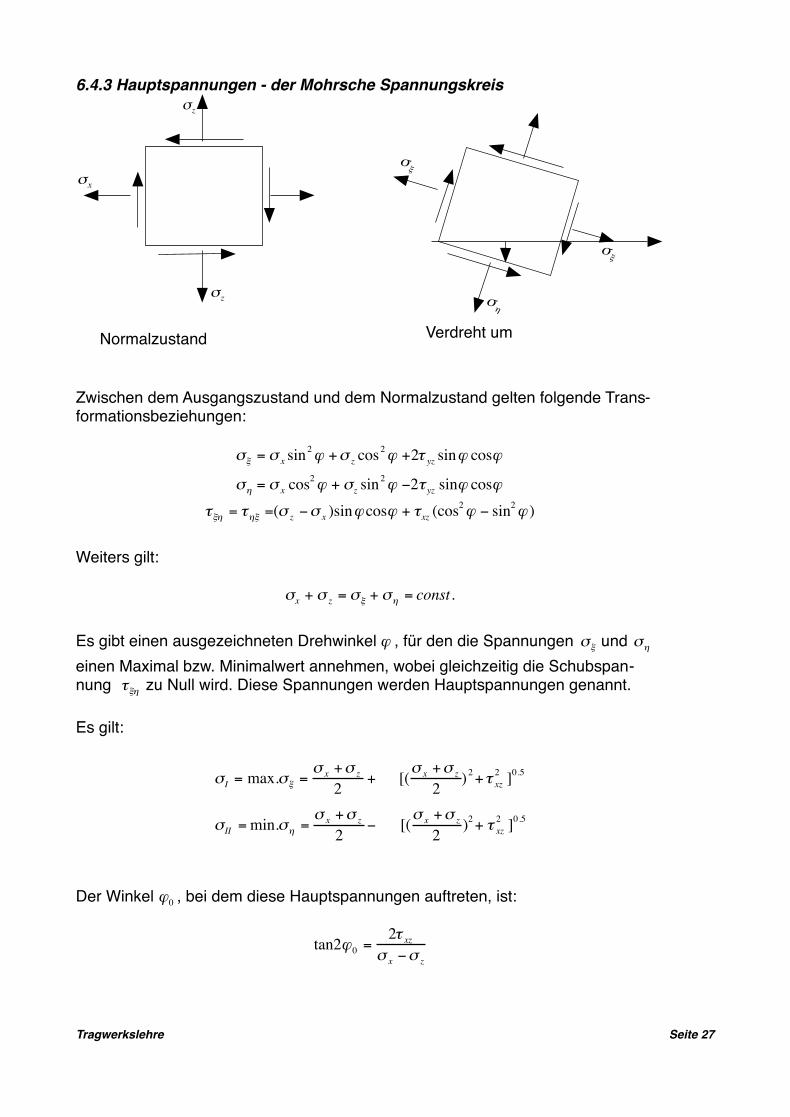
6.4.3 Hauptspannungen - der Mohrsche Spannungskreis
�
Zwischen dem Ausgangszustand und dem Normalzustand gelten folgende Trans-formationsbeziehungen:
Weiters gilt:
Es gibt einen ausgezeichneten Drehwinkel � , für den die Spannungen � und � einen Maximal bzw. Minimalwert annehmen, wobei gleichzeitig die Schubspan-nung � zu Null wird. Diese Spannungen werden Hauptspannungen genannt.
Es gilt:
Der Winkel � , bei dem diese Hauptspannungen auftreten, ist:
σx
σz
σz
ση
σξ
σξ
Normalzustand Verdreht um
σξ = σ x sin2ϕ +σ z cos
2ϕ +2τ yz sinϕ cosϕ
ση = σ x cos2ϕ + σz sin
2ϕ −2τ yz sinϕ cosϕ
τξη = τηξ =(σ z −σ x )sinϕ cosϕ + τxz (cos2ϕ − sin2ϕ )
σx + σ z = σξ + ση = const.
ϕ σξ ση
τξη
σ I = max.σξ =σ x +σ z
2+ [(
σ x +σ z
2)2+τ xz
2 ]0.5
σ II =min.ση =σ x +σ z
2 − [(σ x +σ z
2 )2+ τ xz2 ]0.5
ϕ0
tan2ϕ 0 =2τ xz
σ x −σ z
Tragwerkslehre Seite �27
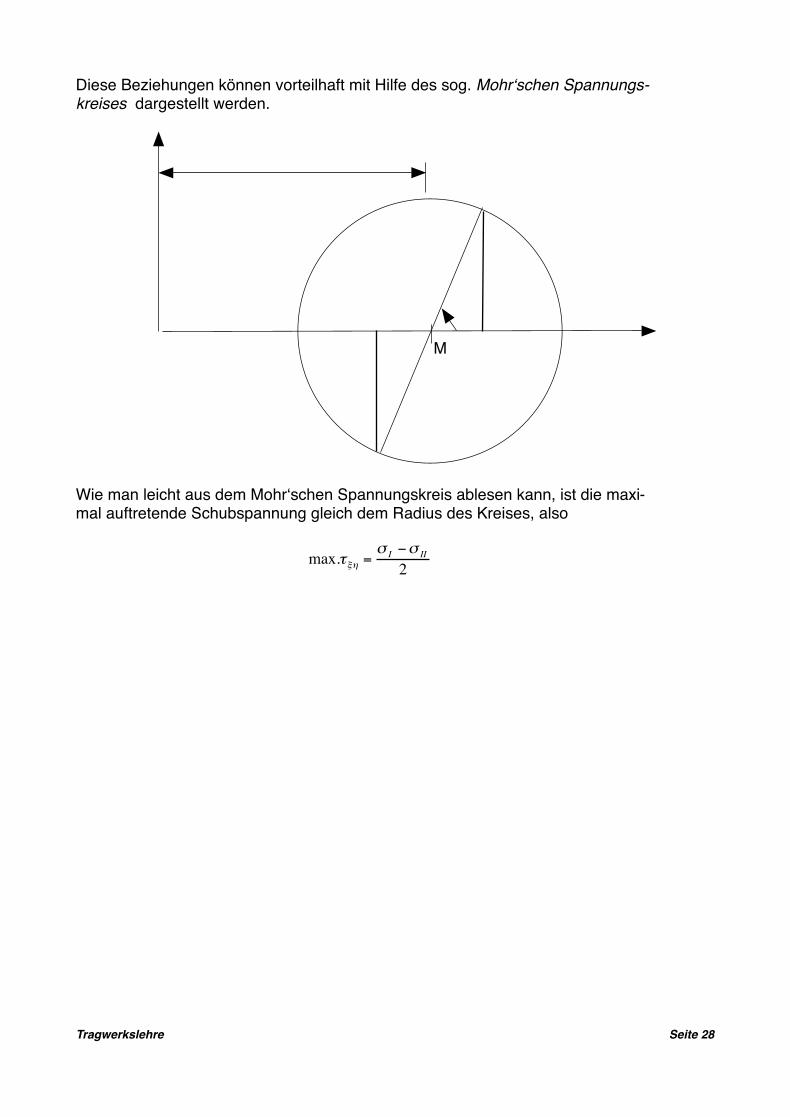
Diese Beziehungen können vorteilhaft mit Hilfe des sog. Mohr‘schen Spannungs-kreises dargestellt werden.
�
Wie man leicht aus dem Mohr‘schen Spannungskreis ablesen kann, ist die maxi-mal auftretende Schubspannung gleich dem Radius des Kreises, also
M
max.τξη =σ I −σ II
2
Tragwerkslehre Seite �28
6.5 Beanspruchungsart Torsion
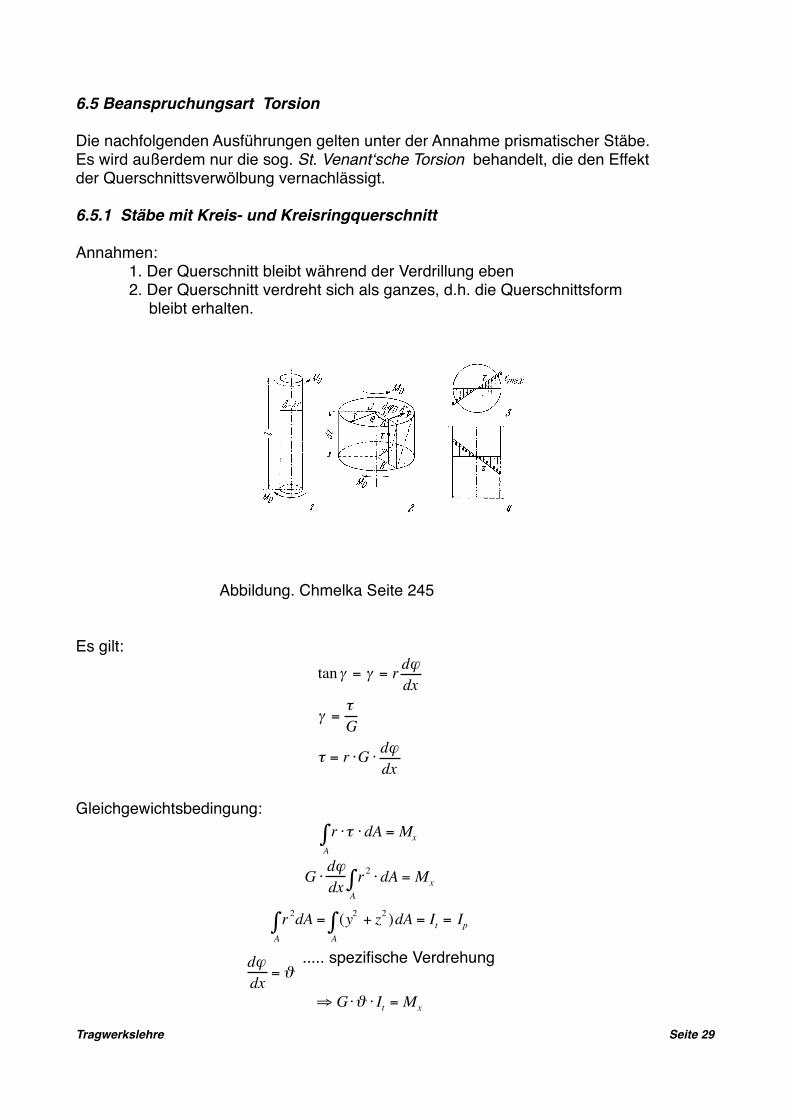
Die nachfolgenden Ausführungen gelten unter der Annahme prismatischer Stäbe. Es wird außerdem nur die sog. St. Venant‘sche Torsion behandelt, die den Effekt der Querschnittsverwölbung vernachlässigt.
6.5.1 Stäbe mit Kreis- und Kreisringquerschnitt
Annahmen:1. Der Querschnitt bleibt während der Verdrillung eben2. Der Querschnitt verdreht sich als ganzes, d.h. die Querschnittsform
bleibt erhalten.
�
Abbildung. Chmelka Seite 245
Es gilt:
Gleichgewichtsbedingung:
..... spezifische Verdrehung
tanγ = γ = r dϕdx
γ =τG
τ = r ⋅G ⋅dϕdx
r ⋅τ ⋅ dAA∫ = Mx
G ⋅dϕdx
r 2 ⋅ dAA∫ = Mx
r 2dAA∫ = (y2 + z2 )dA
A∫ = It = Ip
dϕdx
= ϑ
⇒ G ⋅ϑ ⋅ It = Mx
Tragwerkslehre Seite �29
bzw.�
und �
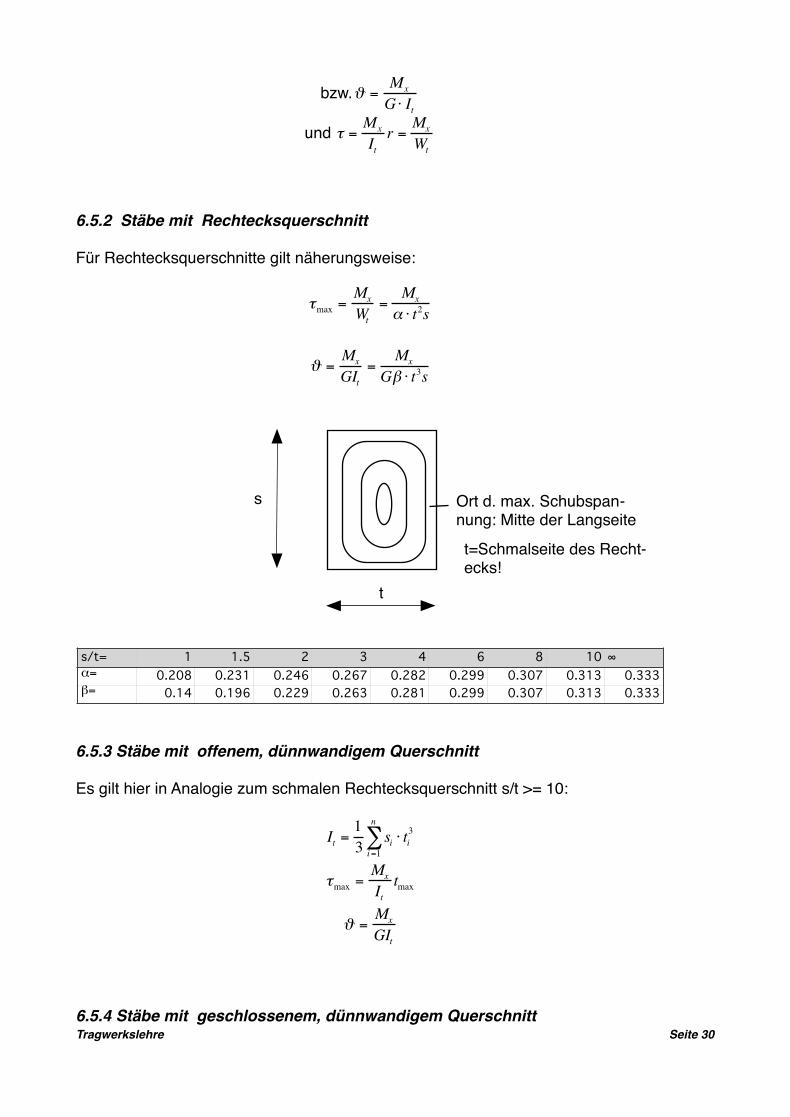
6.5.2 Stäbe mit Rechtecksquerschnitt
Für Rechtecksquerschnitte gilt näherungsweise:
�
6.5.3 Stäbe mit offenem, dünnwandigem Querschnitt
Es gilt hier in Analogie zum schmalen Rechtecksquerschnitt s/t >= 10:
6.5.4 Stäbe mit geschlossenem, dünnwandigem Querschnitt
ϑ =Mx
G ⋅ Itτ =
Mx
Itr =
Mx
Wt
τmax =Mx
Wt=
Mx
α ⋅ t2s
ϑ =Mx
GIt=
Mx
Gβ ⋅ t3s
Ort d. max. Schubspan-nung: Mitte der Langseite
t
s
t=Schmalseite des Recht-ecks!
s/t= 1 1.5 2 3 4 6 8 10 ∞α= 0.208 0.231 0.246 0.267 0.282 0.299 0.307 0.313 0.333β= 0.14 0.196 0.229 0.263 0.281 0.299 0.307 0.313 0.333
It =13 si ⋅ ti
3
i=1
n
∑
τmax =Mx
Ittmax
ϑ =Mx
GIt
Tragwerkslehre Seite �30
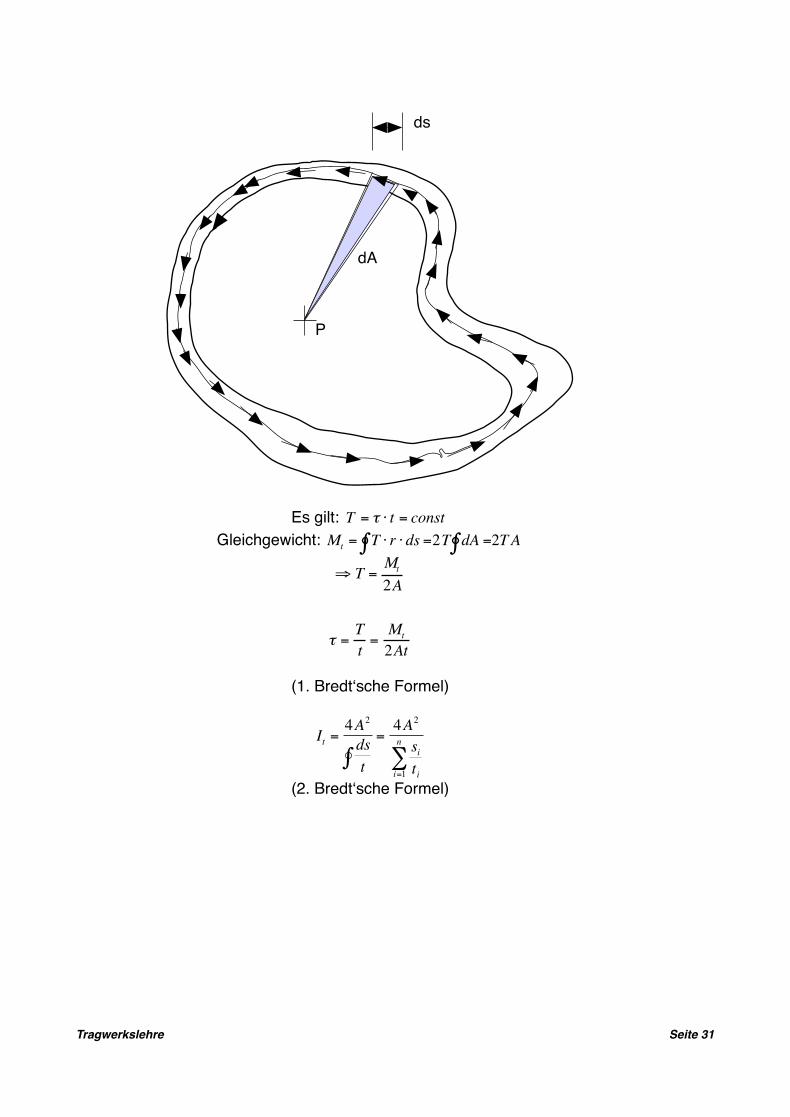
�
Es gilt: �Gleichgewicht: �
�
(1. Bredt‘sche Formel)
�
(2. Bredt‘sche Formel)
ds
dA
P
T = τ ⋅ t = constMt = T ⋅ r ⋅ ds =2T dA =2T∫∫ A
⇒ T = Mt
2A
τ =Tt =
Mt
2At
€
It =4A2
dst∫
=4A2
sitii=1
n
∑
Tragwerkslehre Seite �31
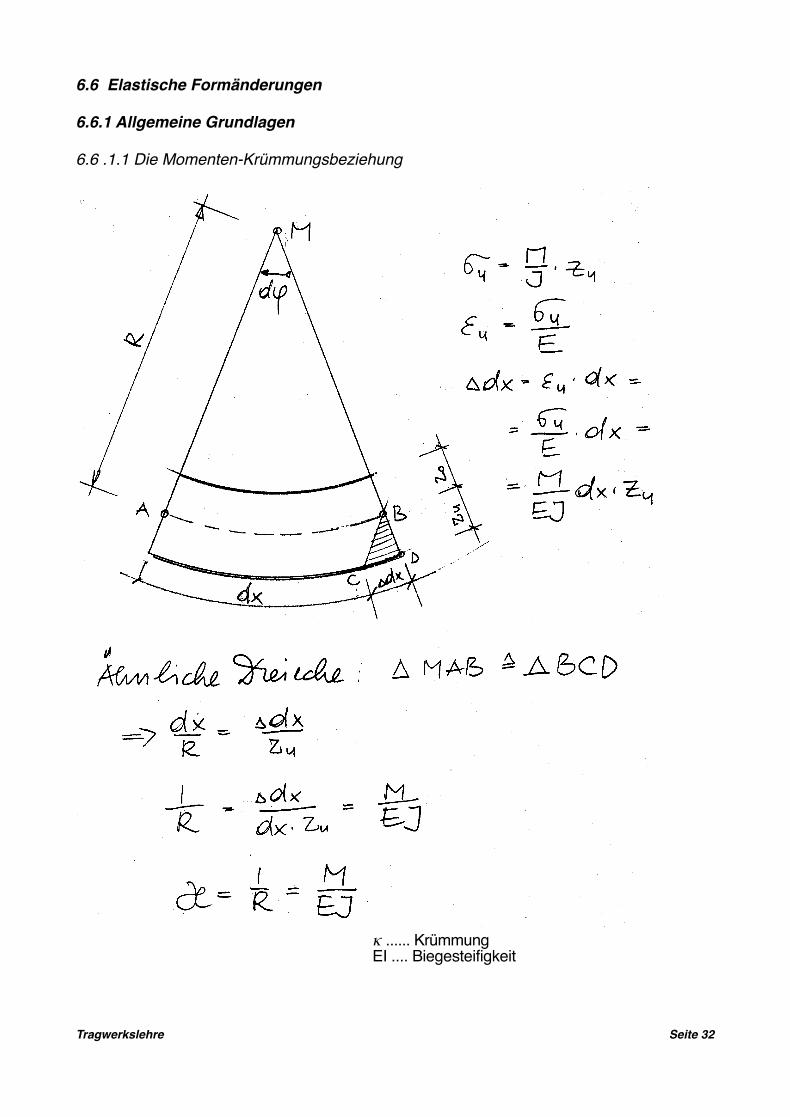
6.6 Elastische Formänderungen
6.6.1 Allgemeine Grundlagen
6.6 .1.1 Die Momenten-Krümmungsbeziehung
�
�κ ...... KrümmungEI .... Biegesteifigkeit
Tragwerkslehre Seite �32
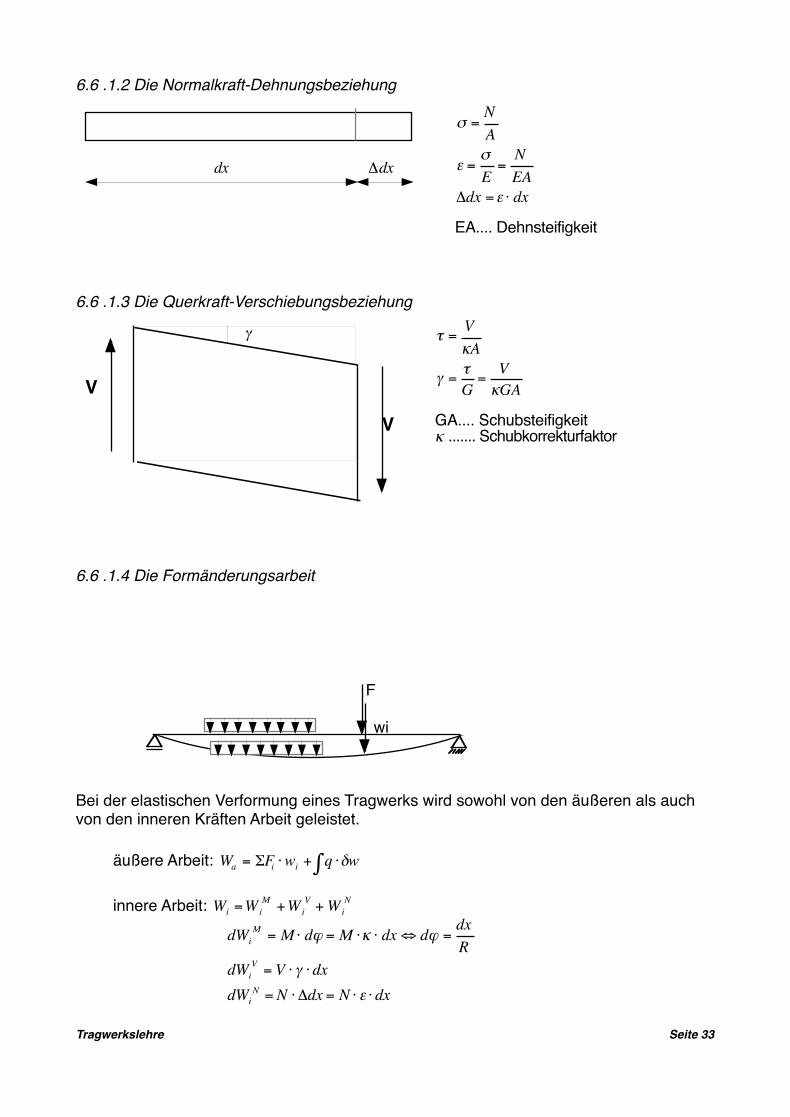
6.6 .1.2 Die Normalkraft-Dehnungsbeziehung
�6.6 .1.3 Die Querkraft-Verschiebungsbeziehung
�
6.6 .1.4 Die Formänderungsarbeit
�
Bei der elastischen Verformung eines Tragwerks wird sowohl von den äußeren als auch von den inneren Kräften Arbeit geleistet.
äußere Arbeit: �
innere Arbeit: �
�
dx Δdx
€
σ =NA
ε =σE
=NEA
Δdx =ε ⋅ dx
EA.... Dehnsteifigkeit
γ
V
V€
τ =VκA
γ =τG
=VκGA
GA.... Schubsteifigkeitκ ....... Schubkorrekturfaktor
wi
F
Wa = ΣFi ⋅wi + q ⋅δw∫
€
Wi =WiM +Wi
V +WiN
€
dWiM = M ⋅ dϕ = M ⋅κ ⋅ dx⇔ dϕ =
dxR
dWiV = V ⋅ γ ⋅ dx
dWiN = N ⋅ Δdx = N ⋅ ε ⋅ dx
Tragwerkslehre Seite �33
�
Es gilt der Arbeitssatz der Mechanik:
�
6.6.2 Prinzip der virtuellen Arbeit
Das Prinzip der virtuellen Arbeit lässt sich auf zweierlei Ar-ten formulieren:
1. Als Prinzip der virtuellen Verschiebungen (Verrückun-gen)
2. Als Prinzip der virtuellen Kraftgrößen
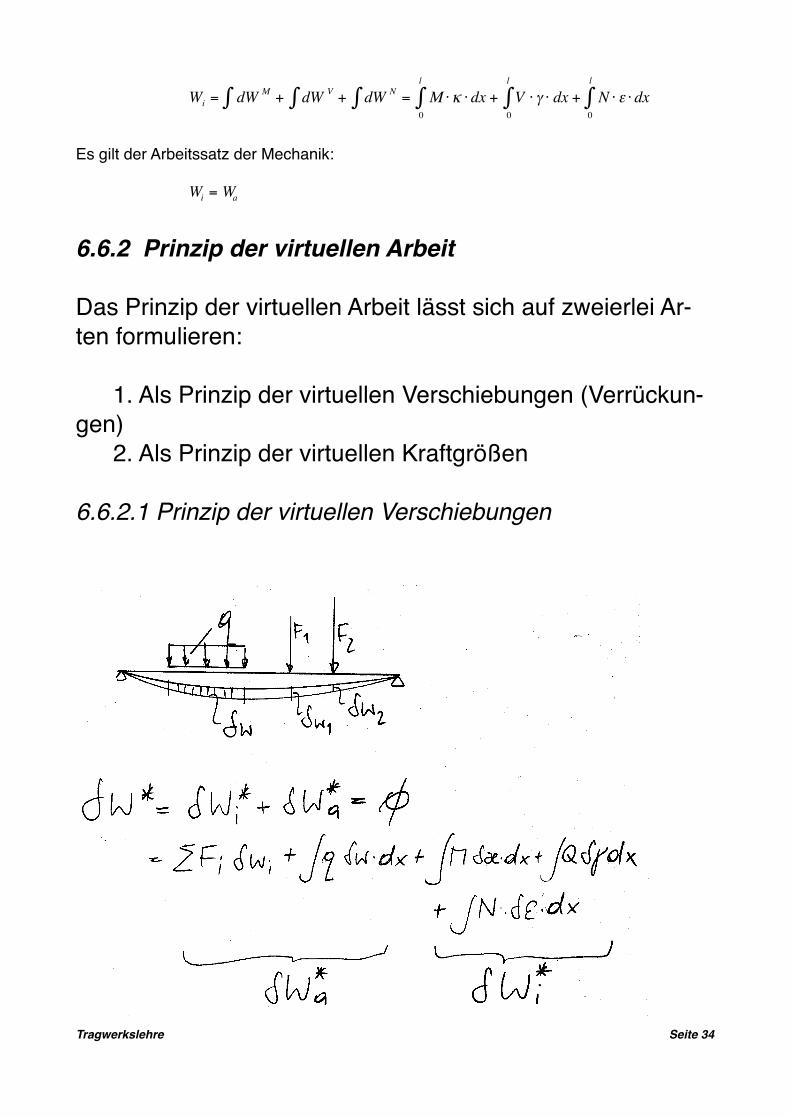
6.6.2.1 Prinzip der virtuellen Verschiebungen
�
€
Wi = dW M∫ + dW V∫ + dW N∫ = M ⋅ κ ⋅ dx0
l
∫ + V ⋅ γ ⋅ dx0
l
∫ + N ⋅ ε ⋅ dx0
l
∫
Wi = Wa
Tragwerkslehre Seite �34
Satz: Ein System, gegeben durch die äußeren Kräfte Fi und q sowie die inneren Schnitt-größen M, N und V, befindet sich im Gleichgewicht, wenn für einen beliebigen virtuellen (=gedachten) Verschiebungszustand die Summe der virtuellen Arbeiten verschwindet.
Anders formuliert:
Man denke sich ein im Gleichgewicht befindliches Tragsystem. Dieses wird einer virtuelle Verformung unterworfen. Es leisten dann die äußeren Kräfte die virtuelle Arbeit � . Gleichzeitig ändern sich die inneren Verformungsgrößen � . Das bedeutet, dass die inneren Kräfte ebenfalls eine virtuelle Arbeit leisten, und zwar � . Die Summe dieser bei-den Arbeiten ist Null.
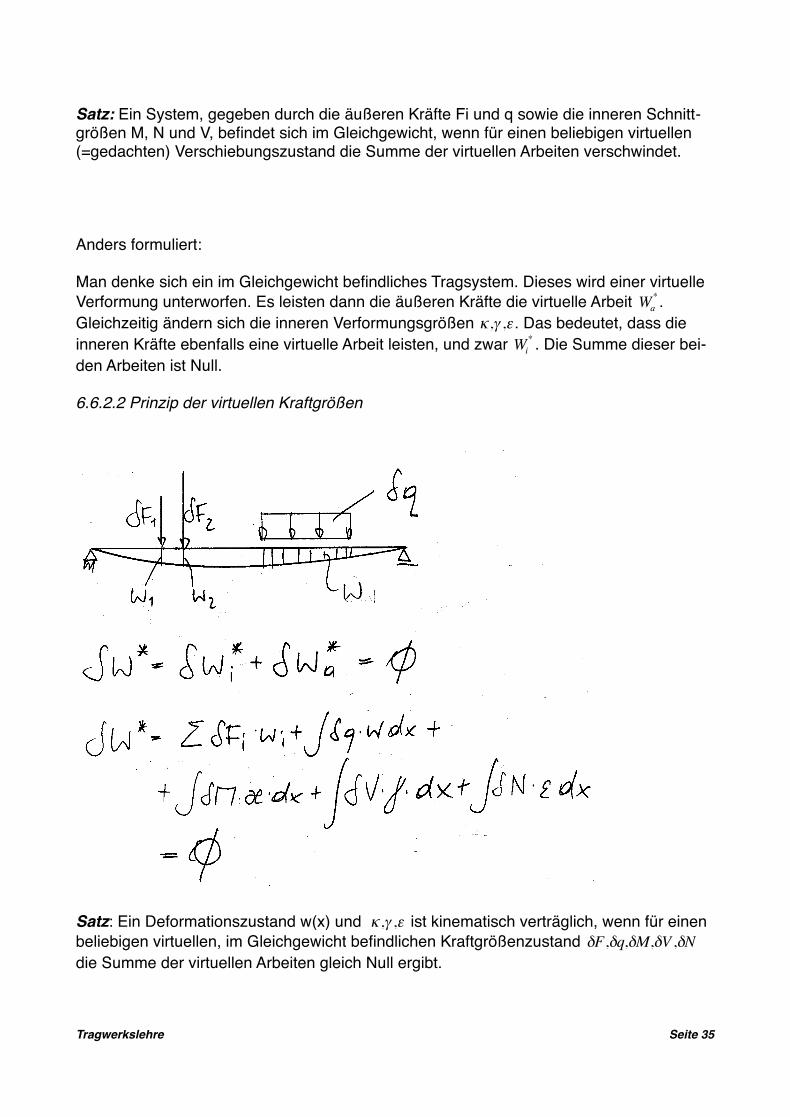
6.6.2.2 Prinzip der virtuellen Kraftgrößen
�
Satz: Ein Deformationszustand w(x) und � ist kinematisch verträglich, wenn für einen beliebigen virtuellen, im Gleichgewicht befindlichen Kraftgrößenzustand � die Summe der virtuellen Arbeiten gleich Null ergibt.
Wa*
€
κ,γ ,εWi
*
€
κ,γ ,ε
€
δF,δq,δM,δV ,δN
Tragwerkslehre Seite �35
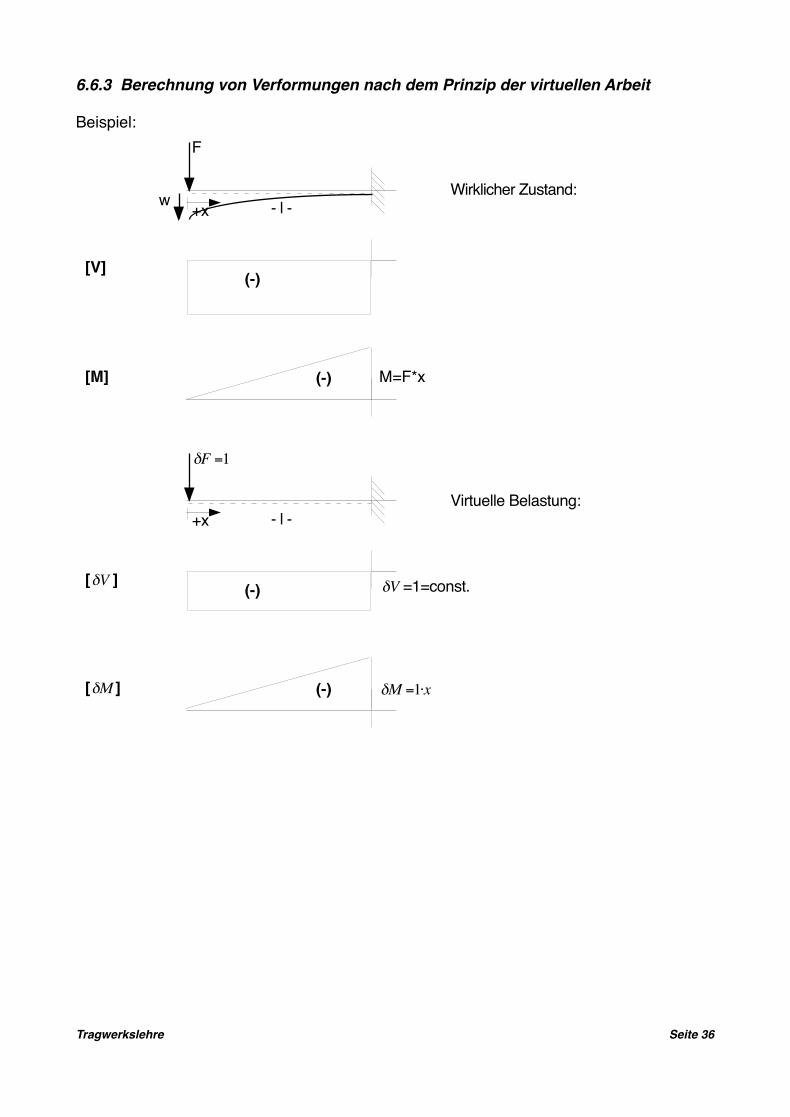
6.6.3 Berechnung von Verformungen nach dem Prinzip der virtuellen Arbeit
Beispiel:
�
F
+x
[V](-)
M=F*x[M] (-)
- l -
δF =1
+x
[
€
δV ] (-)
δM =1⋅x[δM ] (-)
- l -
€
δV =1=const.
w Wirklicher Zustand:
Virtuelle Belastung:
Tragwerkslehre Seite �36
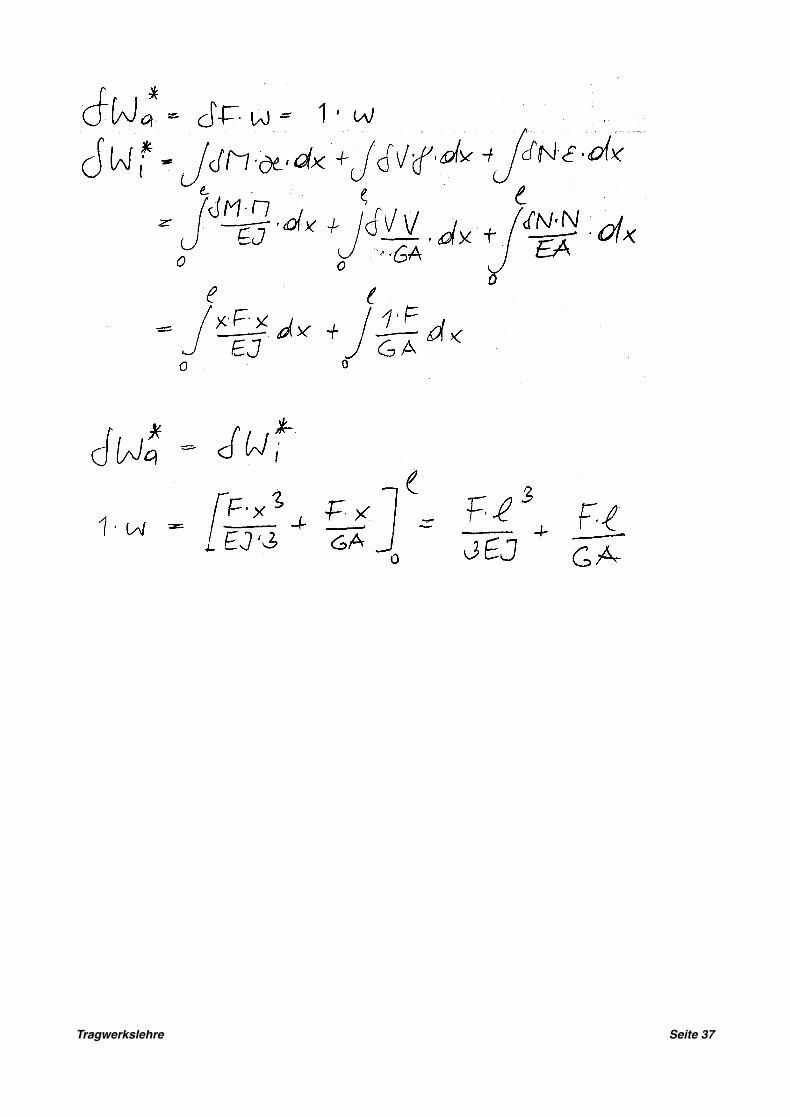
�
Tragwerkslehre Seite �37
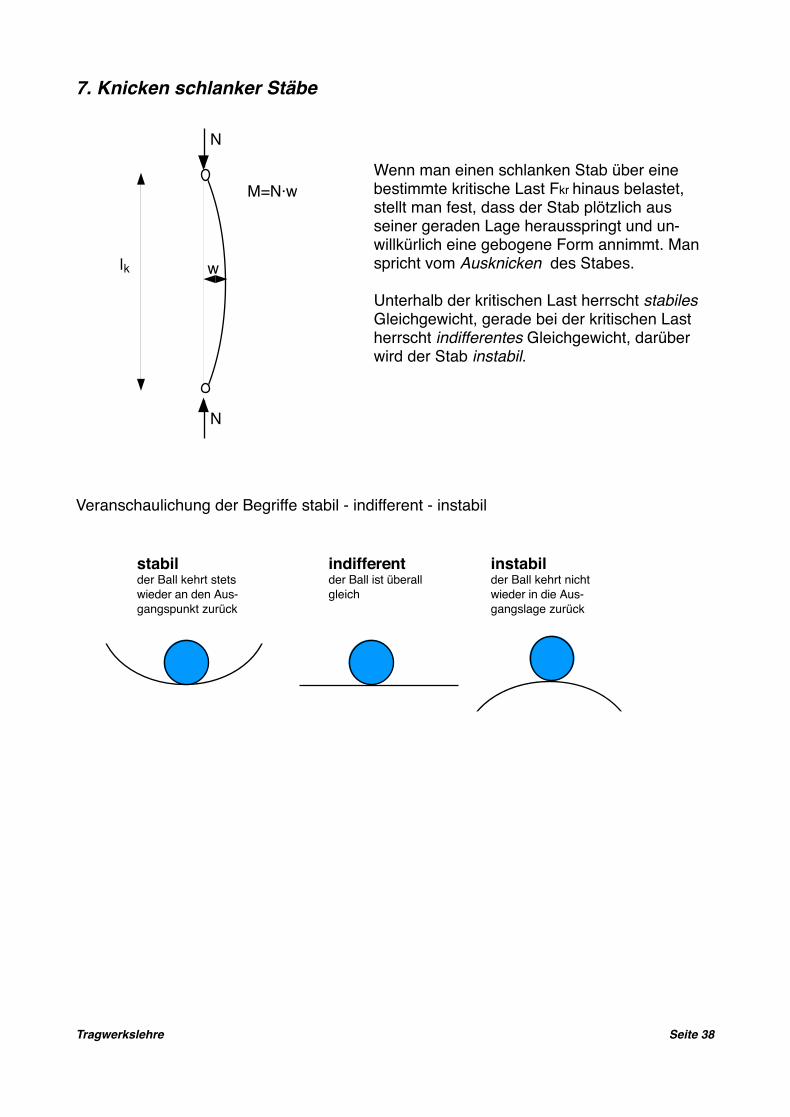
7. Knicken schlanker Stäbe
�
Veranschaulichung der Begriffe stabil - indifferent - instabil
�
N
N
w
M=N·w
lk
stabilder Ball kehrt stets wieder an den Aus-gangspunkt zurück
indifferentder Ball ist überall gleich
instabilder Ball kehrt nicht wieder in die Aus-gangslage zurück
Tragwerkslehre Seite �38
Wenn man einen schlanken Stab über eine bestimmte kritische Last Fkr hinaus belastet, stellt man fest, dass der Stab plötzlich aus seiner geraden Lage herausspringt und un-willkürlich eine gebogene Form annimmt. Man spricht vom Ausknicken des Stabes.
Unterhalb der kritischen Last herrscht stabiles Gleichgewicht, gerade bei der kritischen Last herrscht indifferentes Gleichgewicht, darüber wird der Stab instabil.
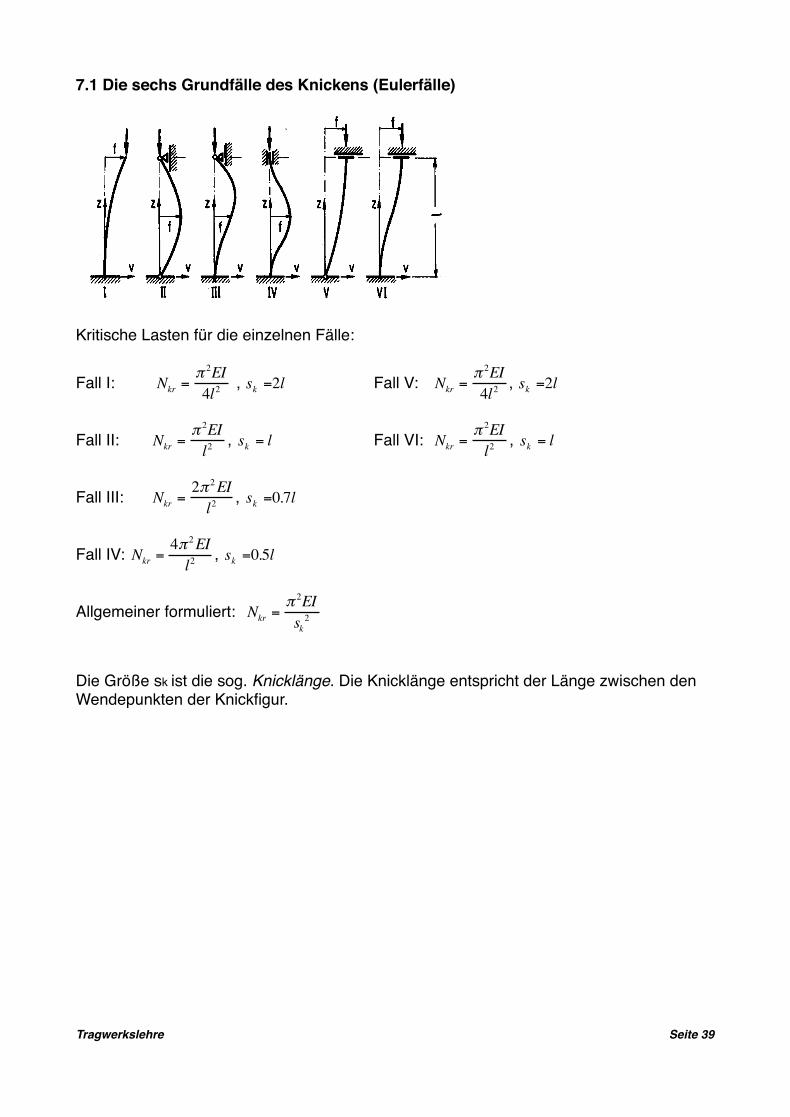
7.1 Die sechs Grundfälle des Knickens (Eulerfälle)
�
Kritische Lasten für die einzelnen Fälle:
Fall I: , Fall V: ,
Fall II: , Fall VI: ,
Fall III: � , �
Fall IV: � , �
Allgemeiner formuliert: �
Die Größe sk ist die sog. Knicklänge. Die Knicklänge entspricht der Länge zwischen den Wendepunkten der Knickfigur.
Nkr =π 2EI4l2 sk =2l Nkr =
π 2EI4l2 sk =2l
Nkr =π 2EIl2 sk = l Nkr =
π 2EIl2 sk = l
Nkr =2π 2EIl2 sk =0.7l
Nkr =4π 2EIl2 sk =0.5l
Nkr =π 2EIsk2
Tragwerkslehre Seite �39
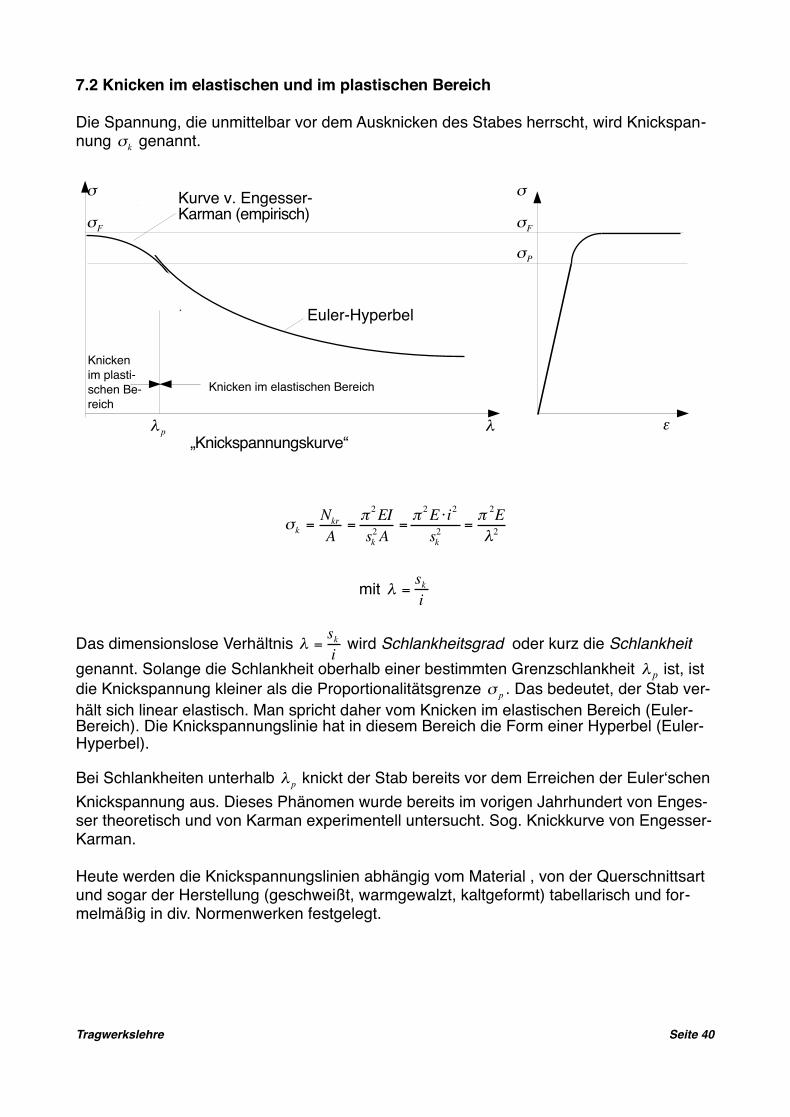
7.2 Knicken im elastischen und im plastischen Bereich
Die Spannung, die unmittelbar vor dem Ausknicken des Stabes herrscht, wird Knickspan-nung � genannt.
�
�
mit �
Das dimensionslose Verhältnis � wird Schlankheitsgrad oder kurz die Schlankheit genannt. Solange die Schlankheit oberhalb einer bestimmten Grenzschlankheit � ist, ist die Knickspannung kleiner als die Proportionalitätsgrenze � . Das bedeutet, der Stab ver-hält sich linear elastisch. Man spricht daher vom Knicken im elastischen Bereich (Euler-Bereich). Die Knickspannungslinie hat in diesem Bereich die Form einer Hyperbel (Euler-Hyperbel).
Bei Schlankheiten unterhalb � knickt der Stab bereits vor dem Erreichen der Euler‘schen Knickspannung aus. Dieses Phänomen wurde bereits im vorigen Jahrhundert von Enges-ser theoretisch und von Karman experimentell untersucht. Sog. Knickkurve von Engesser-Karman.
Heute werden die Knickspannungslinien abhängig vom Material , von der Querschnittsart und sogar der Herstellung (geschweißt, warmgewalzt, kaltgeformt) tabellarisch und for-melmäßig in div. Normenwerken festgelegt.
σk
σ
σF
σP
ε
Euler-Hyperbel
Knicken im elastischen Bereich
σ
σF
σP
λ p λ„Knickspannungskurve“
Kurve v. Engesser-Karman (empirisch)
Knicken im plasti-schen Be-reich
σk =Nkr
A=π 2EIsk2A
=π 2E ⋅i2
sk2=π 2Eλ2
λ =ski
λ =ski
€
λ pσ p
λ p
Tragwerkslehre Seite �40
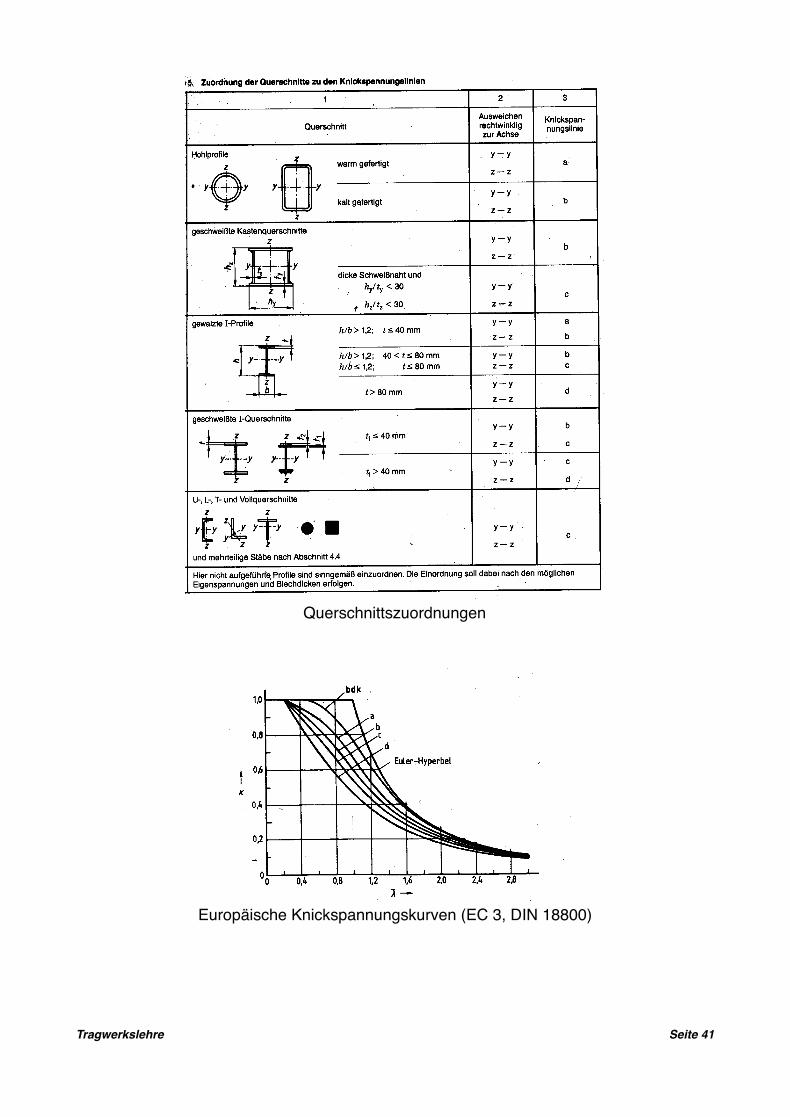
�Querschnittszuordnungen
�Europäische Knickspannungskurven (EC 3, DIN 18800)
Tragwerkslehre Seite �41
8. Stabilität von Bauwerken
8.1 Einführung
Sowohl das Tragwerk als ganzes als auch jedes einzelne Tragwerkselement für sich ge-nommen müssen „stabil“ sein, d.h., es muss Arbeit aufgewendet werden, um das Gleich-gewicht der Kräfte zu verändern.
• Stabilität von einzelnen Tragwerkselementen
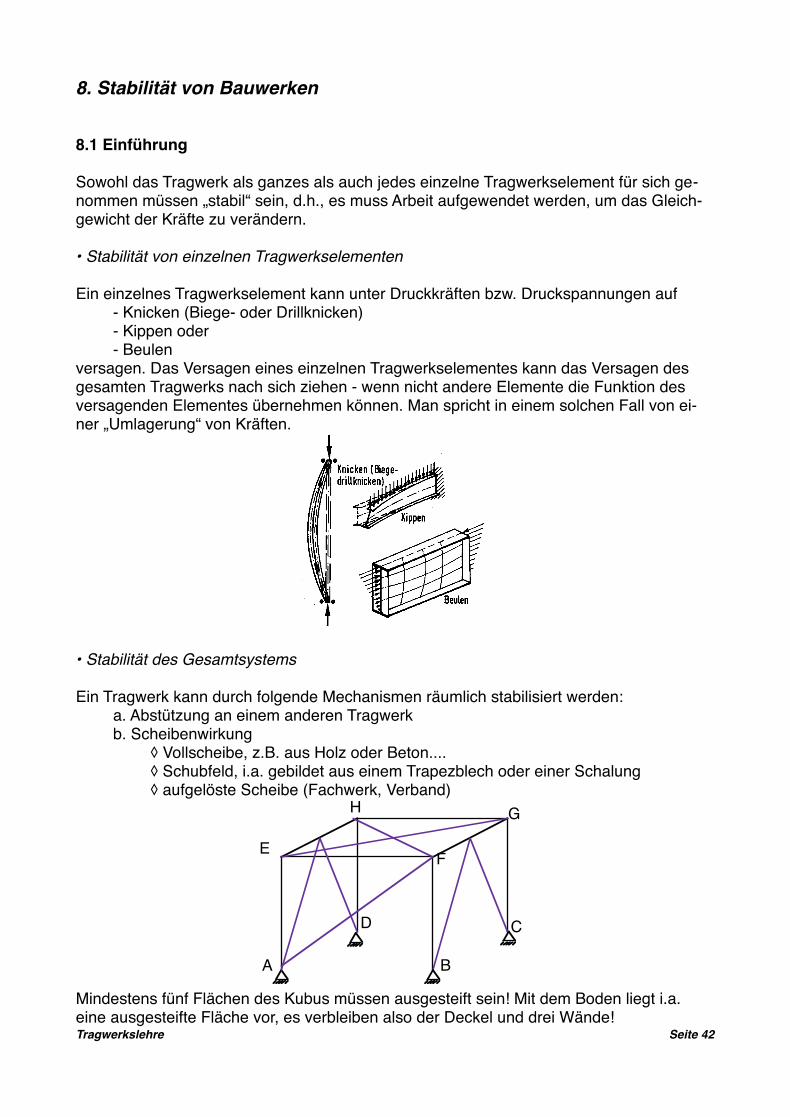
Ein einzelnes Tragwerkselement kann unter Druckkräften bzw. Druckspannungen auf - Knicken (Biege- oder Drillknicken)- Kippen oder - Beulen
versagen. Das Versagen eines einzelnen Tragwerkselementes kann das Versagen des gesamten Tragwerks nach sich ziehen - wenn nicht andere Elemente die Funktion des versagenden Elementes übernehmen können. Man spricht in einem solchen Fall von ei-ner „Umlagerung“ von Kräften.
�
• Stabilität des Gesamtsystems
Ein Tragwerk kann durch folgende Mechanismen räumlich stabilisiert werden:a. Abstützung an einem anderen Tragwerkb. Scheibenwirkung
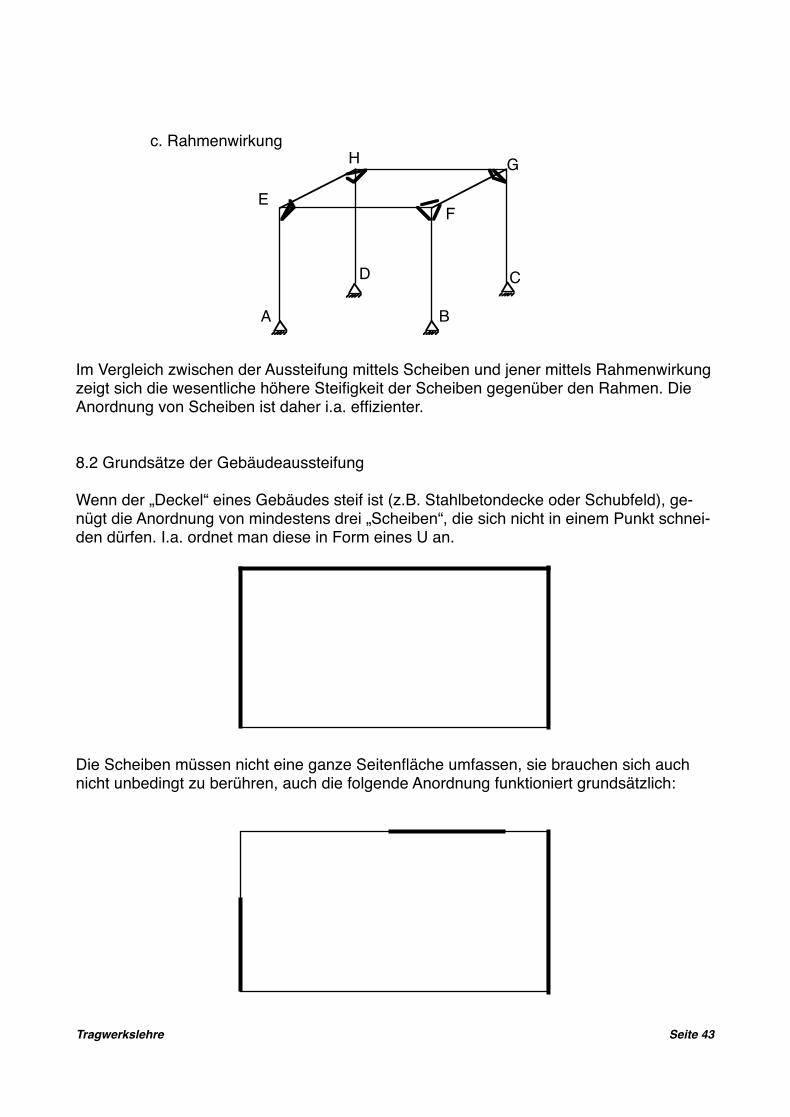
◊ Vollscheibe, z.B. aus Holz oder Beton....◊ Schubfeld, i.a. gebildet aus einem Trapezblech oder einer Schalung◊ aufgelöste Scheibe (Fachwerk, Verband)
�Mindestens fünf Flächen des Kubus müssen ausgesteift sein! Mit dem Boden liegt i.a. eine ausgesteifte Fläche vor, es verbleiben also der Deckel und drei Wände!
A
D
B
C
E F
GH
Tragwerkslehre Seite �42
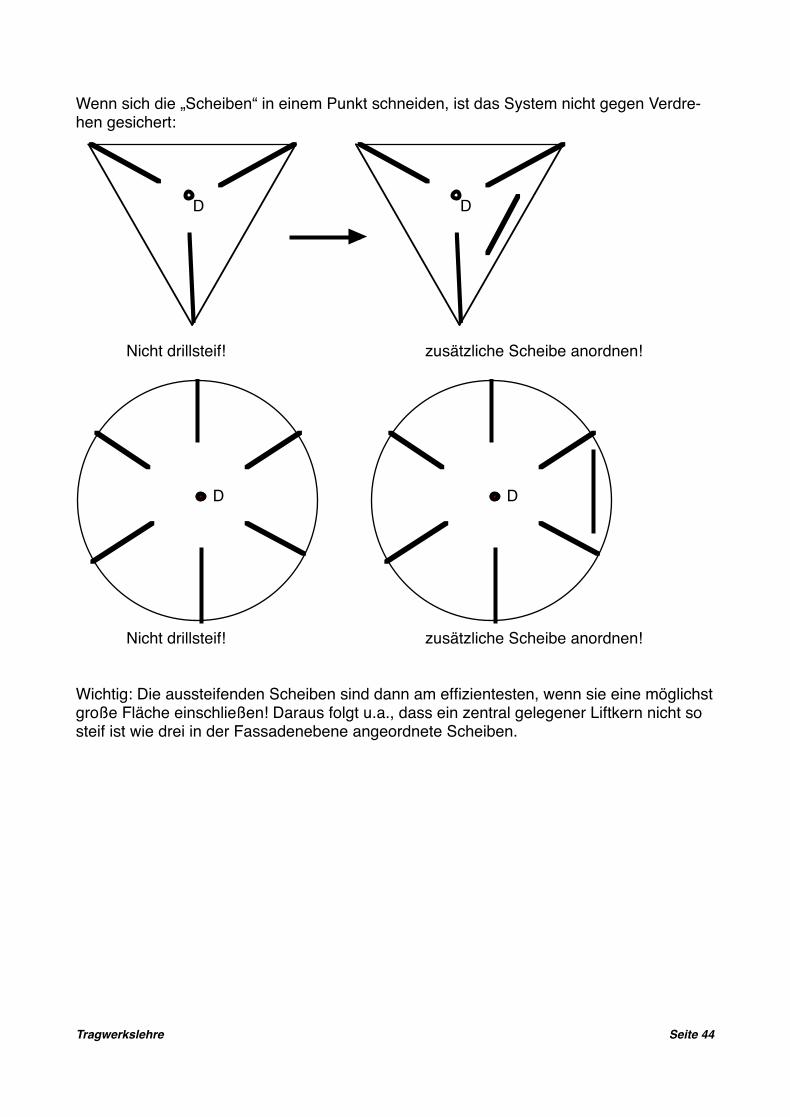
c. Rahmenwirkung
�
Im Vergleich zwischen der Aussteifung mittels Scheiben und jener mittels Rahmenwirkung zeigt sich die wesentliche höhere Steifigkeit der Scheiben gegenüber den Rahmen. Die Anordnung von Scheiben ist daher i.a. effizienter.
8.2 Grundsätze der Gebäudeaussteifung
Wenn der „Deckel“ eines Gebäudes steif ist (z.B. Stahlbetondecke oder Schubfeld), ge-nügt die Anordnung von mindestens drei „Scheiben“, die sich nicht in einem Punkt schnei-den dürfen. I.a. ordnet man diese in Form eines U an.
�
Die Scheiben müssen nicht eine ganze Seitenfläche umfassen, sie brauchen sich auch nicht unbedingt zu berühren, auch die folgende Anordnung funktioniert grundsätzlich:
�
A
D
B
C
EF
GH
Tragwerkslehre Seite �43
Wenn sich die „Scheiben“ in einem Punkt schneiden, ist das System nicht gegen Verdre-hen gesichert:
� Nicht drillsteif! zusätzliche Scheibe anordnen!
� Nicht drillsteif! zusätzliche Scheibe anordnen!
Wichtig: Die aussteifenden Scheiben sind dann am effizientesten, wenn sie eine möglichst große Fläche einschließen! Daraus folgt u.a., dass ein zentral gelegener Liftkern nicht so steif ist wie drei in der Fassadenebene angeordnete Scheiben.
D D
D D
Tragwerkslehre Seite �44