Tracker - Hong Kong University of Science and Technology
42
Tracker
Transcript of Tracker - Hong Kong University of Science and Technology
Tracker
2
Tracker Functions
• Charged particle trajectory • Momentum measurement
• Requires magnetic field • Primary and secondary vertex determination • Particle ID (in conjunction with other detectors):
• e/γ discrimination • Electron ID using transition radiation • p/K/π separation using dE/dx vs p • p/K/π separation in combination with Cerenkov angle
• Integral part of energy flow measurement • Trigger
3
Typical Tracking Detectors
• Silicon • Resolution ~ 10 µm (sometimes poorer to save cost) • Very high granularity possible • Expensive • Small number of layers, N ~ 10 (CMS: 3 pixel + 10 strip pairs)
• Wire chamber • Resolution ~ 100 µm transverse, (much) worse along wire • Poor granularity • Relatively cheap • Many hit layers, N ~ 100 (UA1: ~70; CDF: 96)
• Time projection chamber • Resolution ~ 100+ µm (in 3D) • Good granularity because of 3D • Very long integration time
- ALEPH: ~50 µsec; ALICE: ~90 µsec - CEPC bunch crossing ~ 3 µsec
4
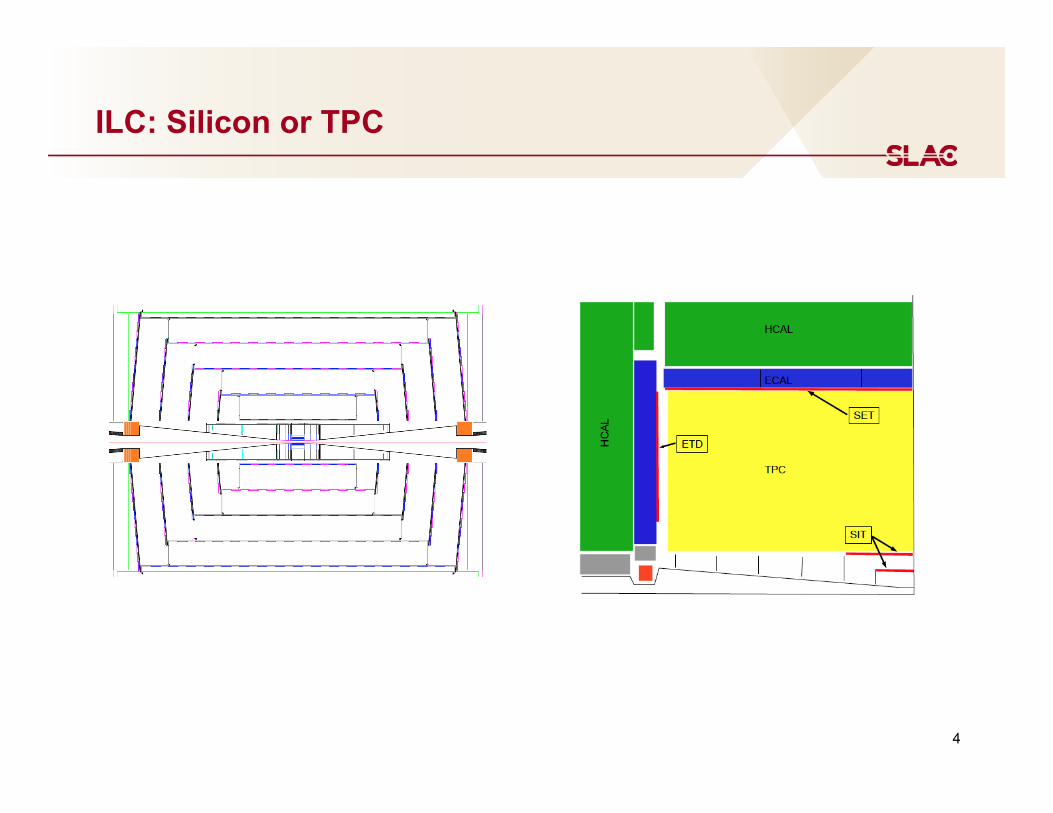
ILC: Silicon or TPC
Momentum Resolution
5
6
Momentum Resolution
Intrinsic contributions determined by design • Measurement precision • Multiple scattering Other contributions that are in principle reducible • Magnetic field map • Detector alignment • Pulse height slewing if timing used • Etc
Enabled by proper design, construction
and monitoring
7
Three-Point Measurement
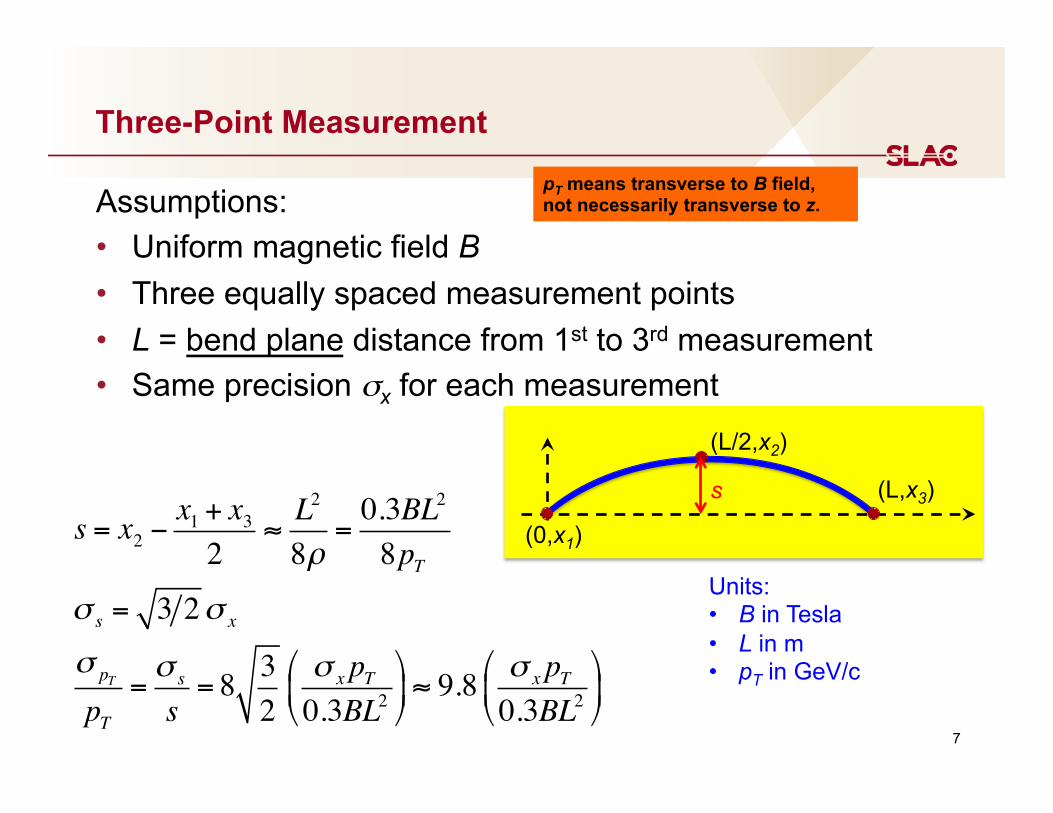
Assumptions: • Uniform magnetic field B • Three equally spaced measurement points • L = bend plane distance from 1st to 3rd measurement • Same precision σx for each measurement
(0,x1)
(L/2,x2)
(L,x3) s
s = x2 −x1 + x32
≈L2
8ρ=0.3BL2
8pTσ s = 3 2σ x
σ pT
pT=σ s
s= 8 3
2σ x pT0.3BL2#
$%
&
'( ≈ 9.8
σ x pT0.3BL2#
$%
&
'(
Units: • B in Tesla • L in m • pT in GeV/c
pT means transverse to B field, not necessarily transverse to z.

8
Gluckstern Paper
• Considers the general case of unequal spacing between hits and different precision among the hits.
• Formulae for direction as well as momentum resolution. • Incorporated into codes such as TRKERR and others • Optimized (but not necessarily practical) layouts • For best momentum resolution • For best direction
9
N Equally Spaced Measurements with Fixed Precision
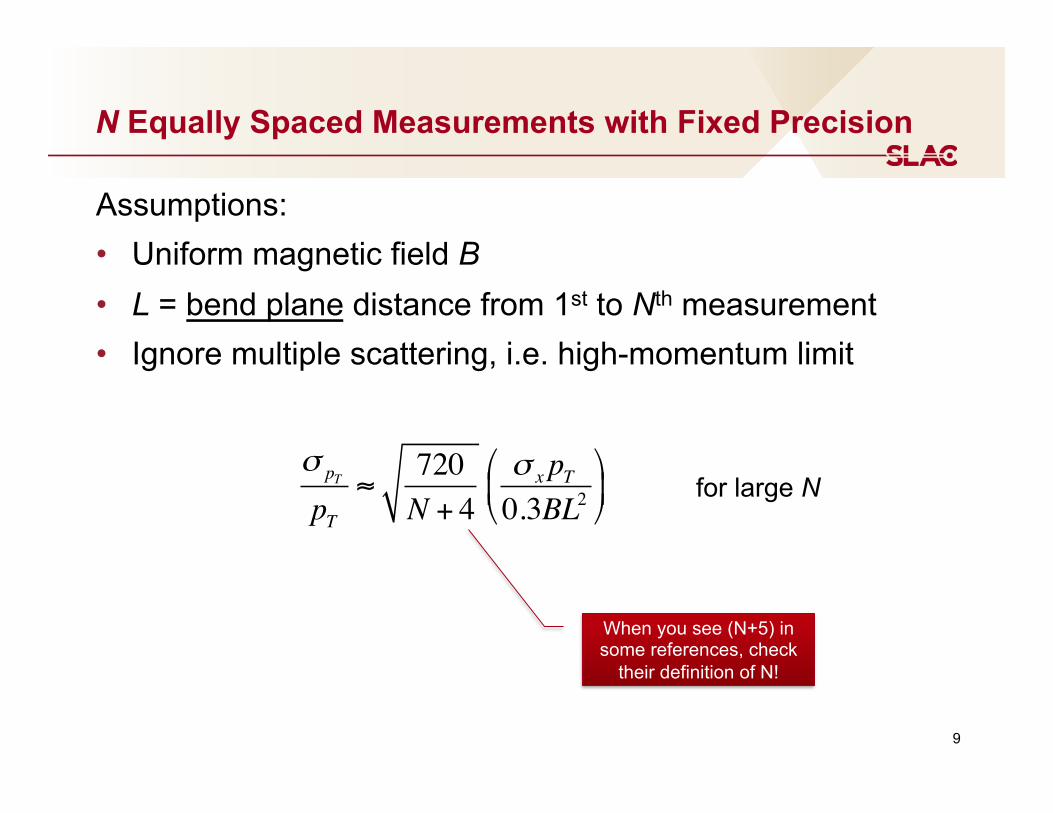
Assumptions: • Uniform magnetic field B • L = bend plane distance from 1st to Nth measurement • Ignore multiple scattering, i.e. high-momentum limit
σ pT
pT≈
720N + 4
σ x pT0.3BL2"
#$
%
&' for large N
When you see (N+5) in some references, check
their definition of N!
10
What Is Large?
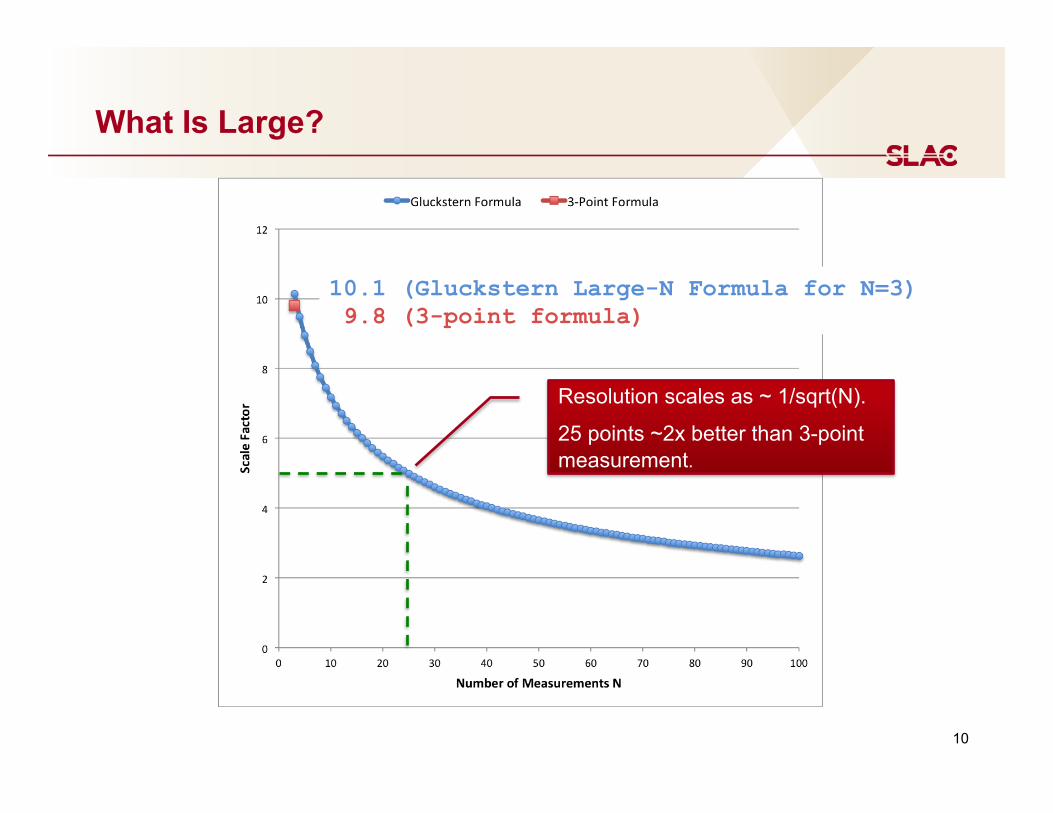
10.1 (Gluckstern Large-N Formula for N=3) 9.8 (3-point formula)
Resolution scales as ~ 1/sqrt(N).
25 points ~2x better than 3-point measurement.
11
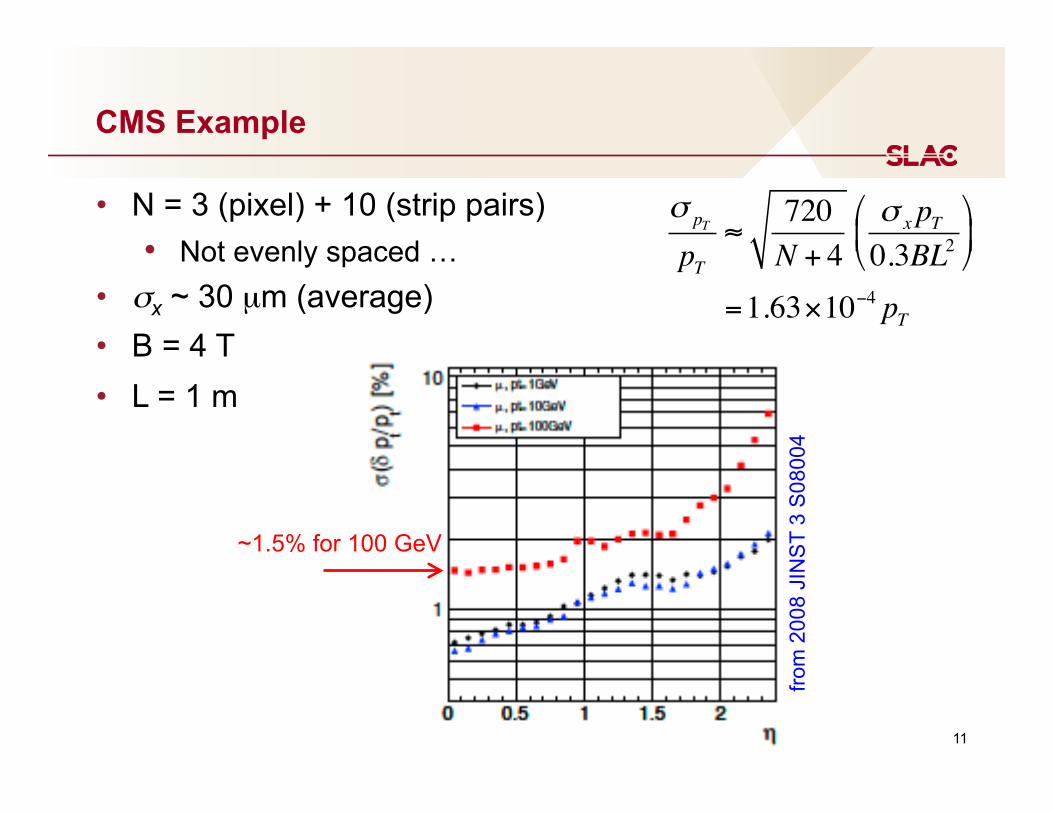
CMS Example
• N = 3 (pixel) + 10 (strip pairs) • Not evenly spaced …
• σx ~ 30 µm (average) • B = 4 T • L = 1 m
σ pT
pT≈
720N + 4
σ x pT0.3BL2"
#$
%
&'
=1.63×10−4 pT
~1.5% for 100 GeV
from
200
8 JI
NS
T 3
S08
004
12
TPC and Silicon Tracker
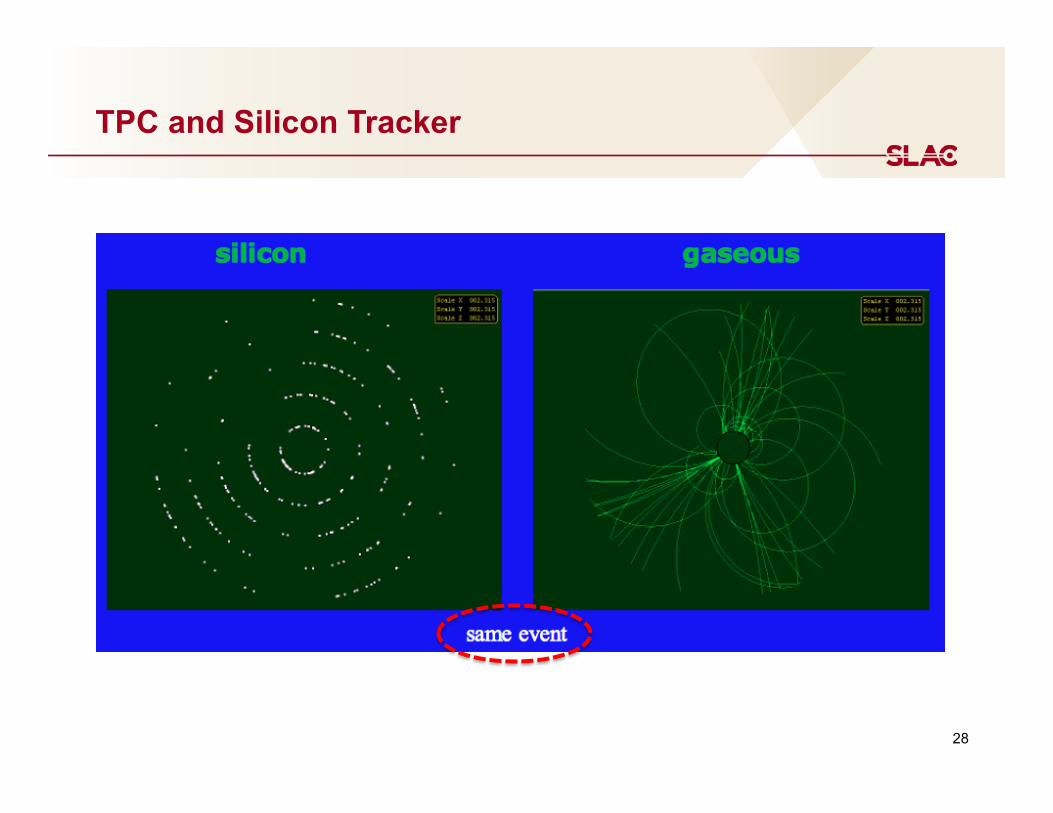
• TPC point resolution ~10x worse than silicon. • Would need 100x more points to compensate.
• May not be practical • Common remediation:
• More measurement points (but less than100x) • Larger tracking volume
σ pT
pT≈
720N + 4
σ x pT0.3BL2"
#$
%
&'
13
Resolutions are well estimated using Gluckstern formula.
Before there is an advanced detector design including realistic supports and services, detailed simulation can be misleading: precision achieved beyond Gluckstern formula is compromised by inaccuracies due to poorly understood material inventory etc.
14
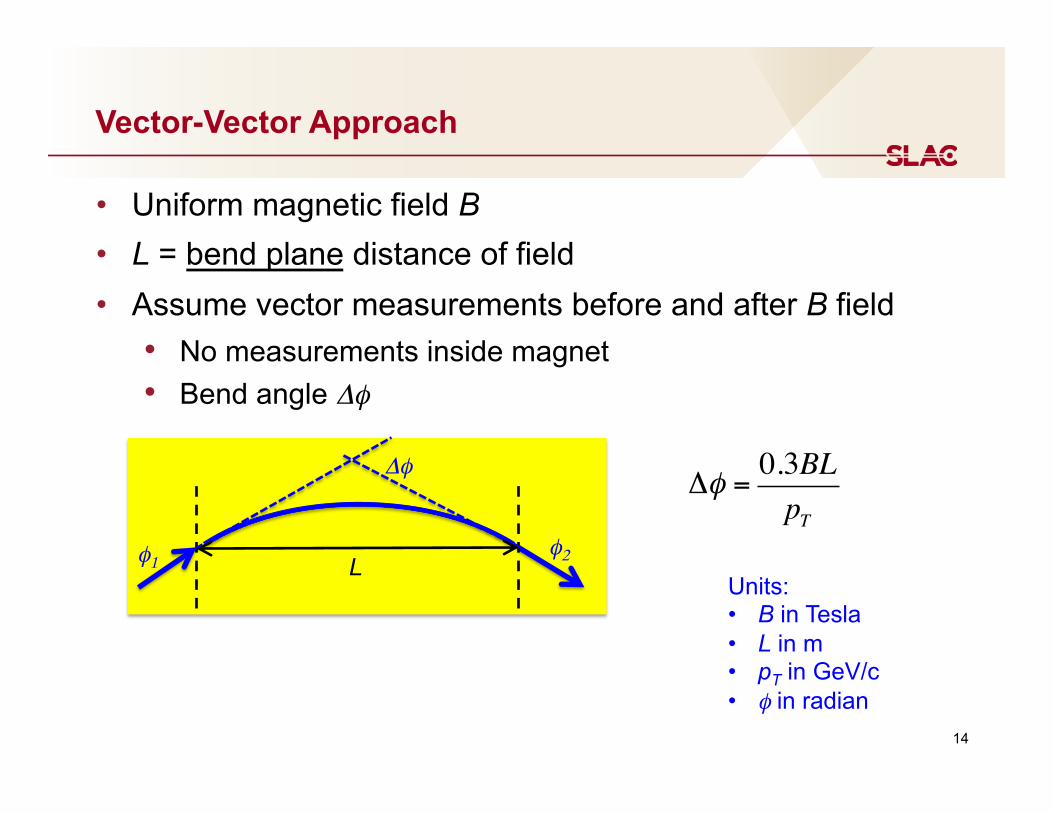
Vector-Vector Approach
• Uniform magnetic field B • L = bend plane distance of field • Assume vector measurements before and after B field
• No measurements inside magnet • Bend angle Δφ
Δφ =
0.3BLpT
Units: • B in Tesla • L in m • pT in GeV/c • φ in radian
Δφ
L φ1 φ2
Multiple Scattering
15
16
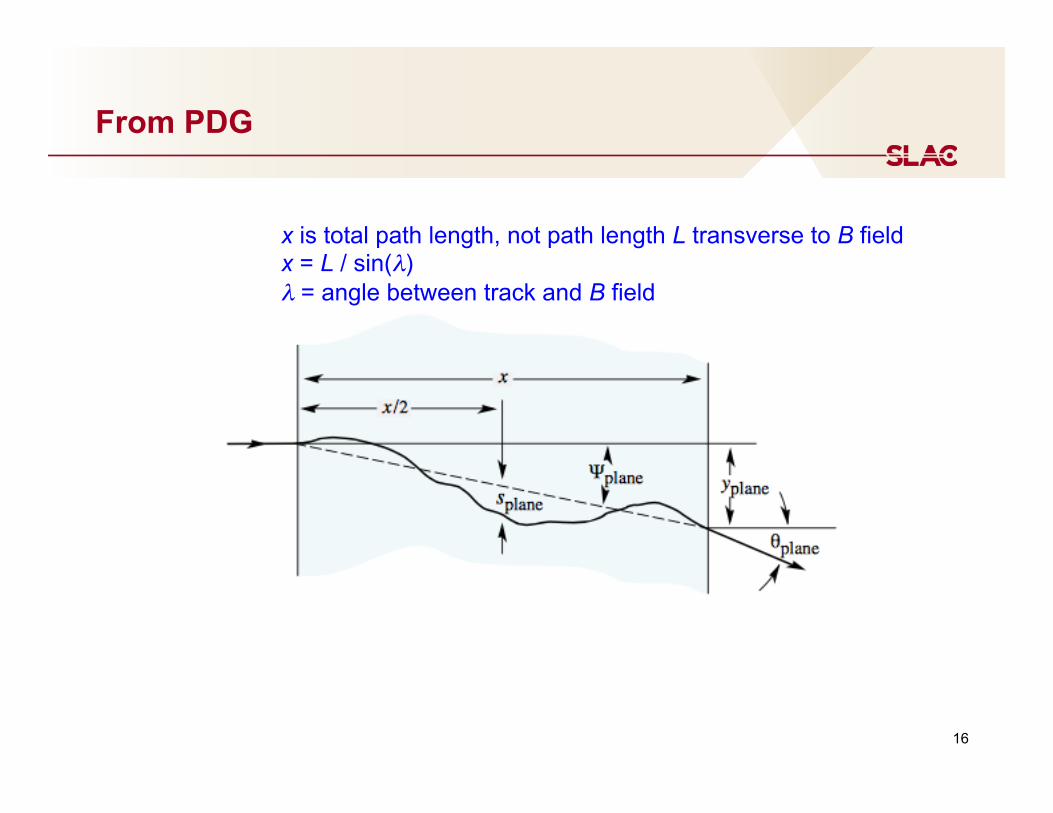
From PDG
x is total path length, not path length L transverse to B field x = L / sin(λ) λ = angle between track and B field
17
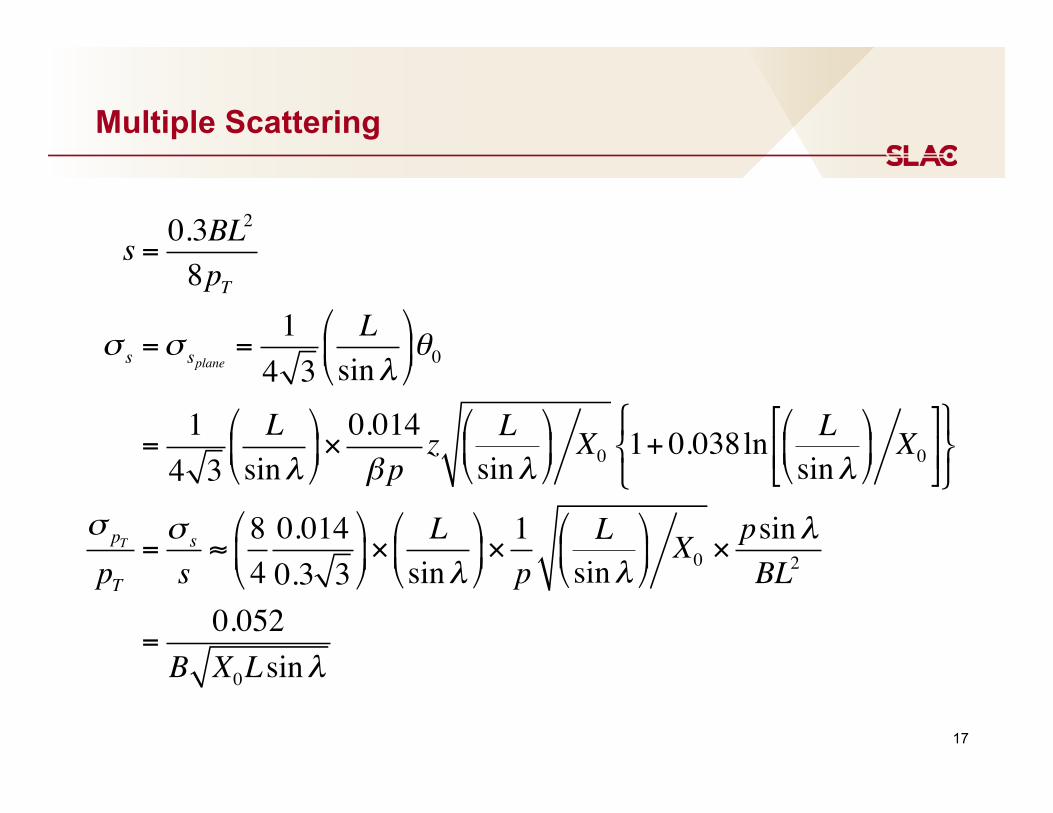
Multiple Scattering
s = 0.3BL2
8pT
σ s =σ splane=14 3
Lsinλ!
"#
$
%&θ0
=14 3
Lsinλ!
"#
$
%&×0.014β p
z Lsinλ!
"#
$
%& X0 1+ 0.038ln
Lsinλ!
"#
$
%& X0
(
)*
+
,-
./0
123
σ pT
pT=σ s
s≈840.0140.3 3
!
"#
$
%&×
Lsinλ!
"#
$
%&×1p
Lsinλ!
"#
$
%& X0 ×
psinλBL2
=0.052
B X0Lsinλ
Magnetic Field
18
19
Magnet for Central / Barrel Tracking
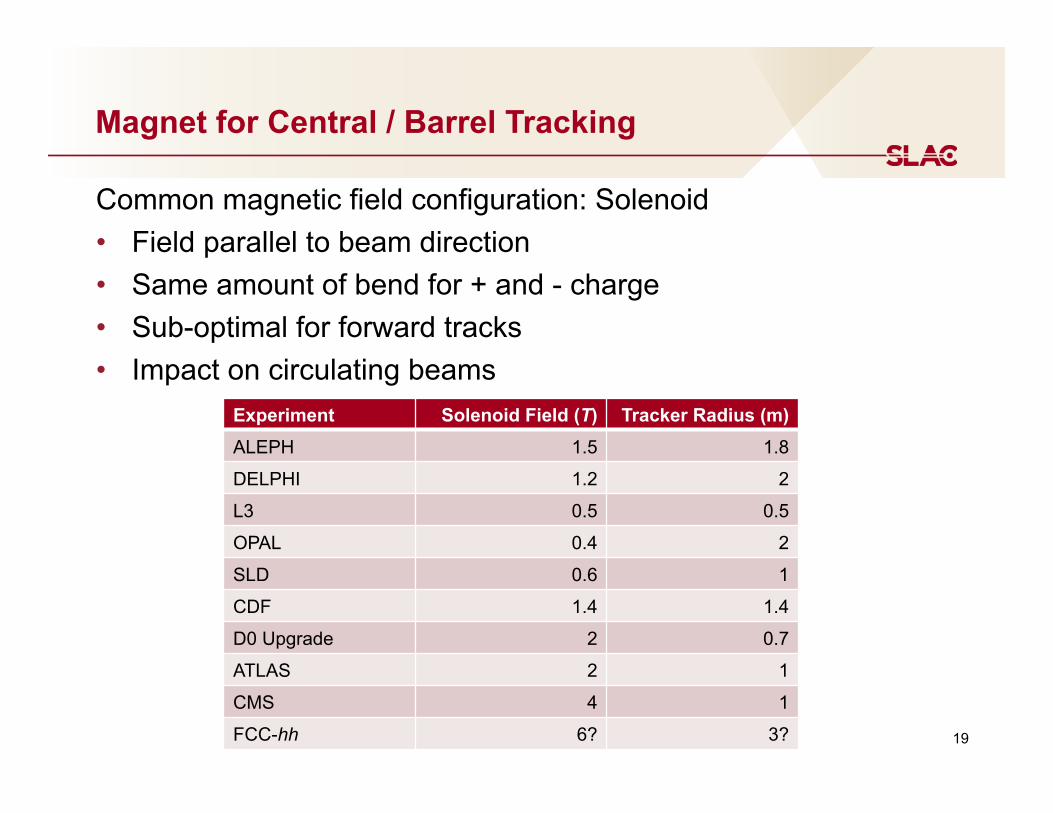
Common magnetic field configuration: Solenoid • Field parallel to beam direction • Same amount of bend for + and - charge • Sub-optimal for forward tracks • Impact on circulating beams Experiment Solenoid Field (T) Tracker Radius (m)
ALEPH 1.5 1.8
DELPHI 1.2 2
L3 0.5 0.5
OPAL 0.4 2
SLD 0.6 1
CDF 1.4 1.4
D0 Upgrade 2 0.7
ATLAS 2 1
CMS 4 1
FCC-hh 6? 3?
UA1
20
Magnet for Central / Barrel Tracking
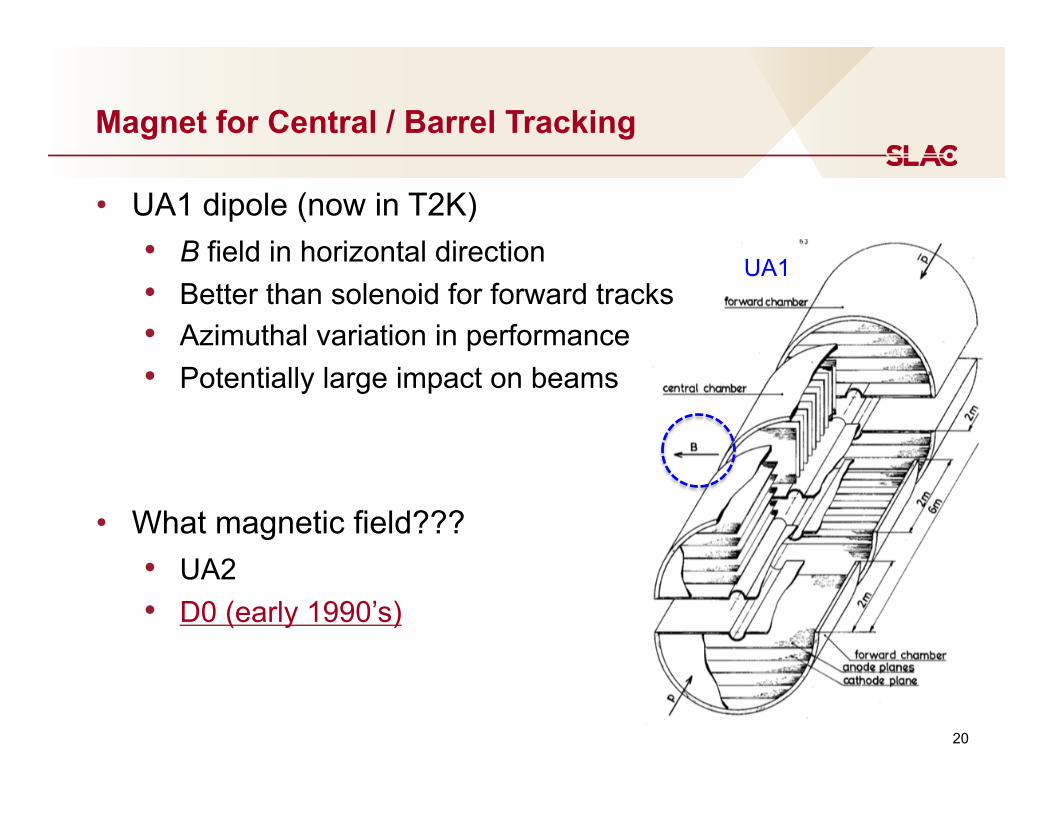
• UA1 dipole (now in T2K) • B field in horizontal direction • Better than solenoid for forward tracks • Azimuthal variation in performance • Potentially large impact on beams
• What magnetic field??? • UA2 • D0 (early 1990’s)
21
Magnet for Forward Tracking
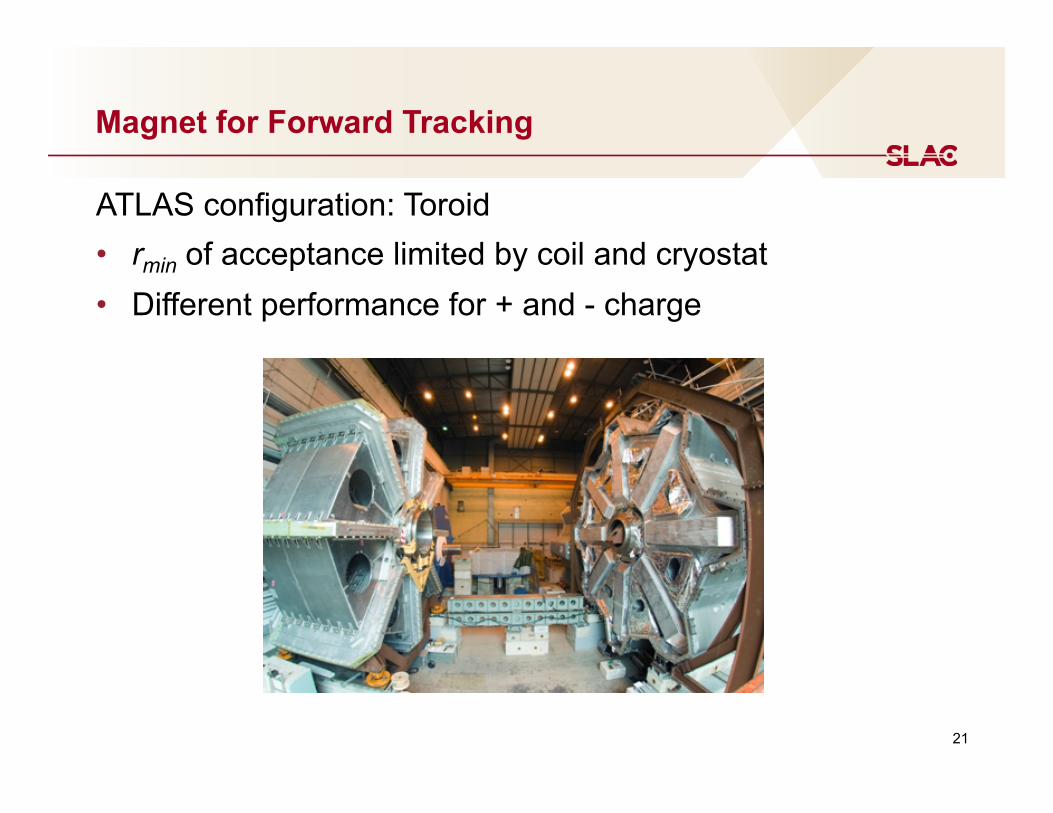
ATLAS configuration: Toroid • rmin of acceptance limited by coil and cryostat • Different performance for + and - charge
22
Magnet for Forward Tracking
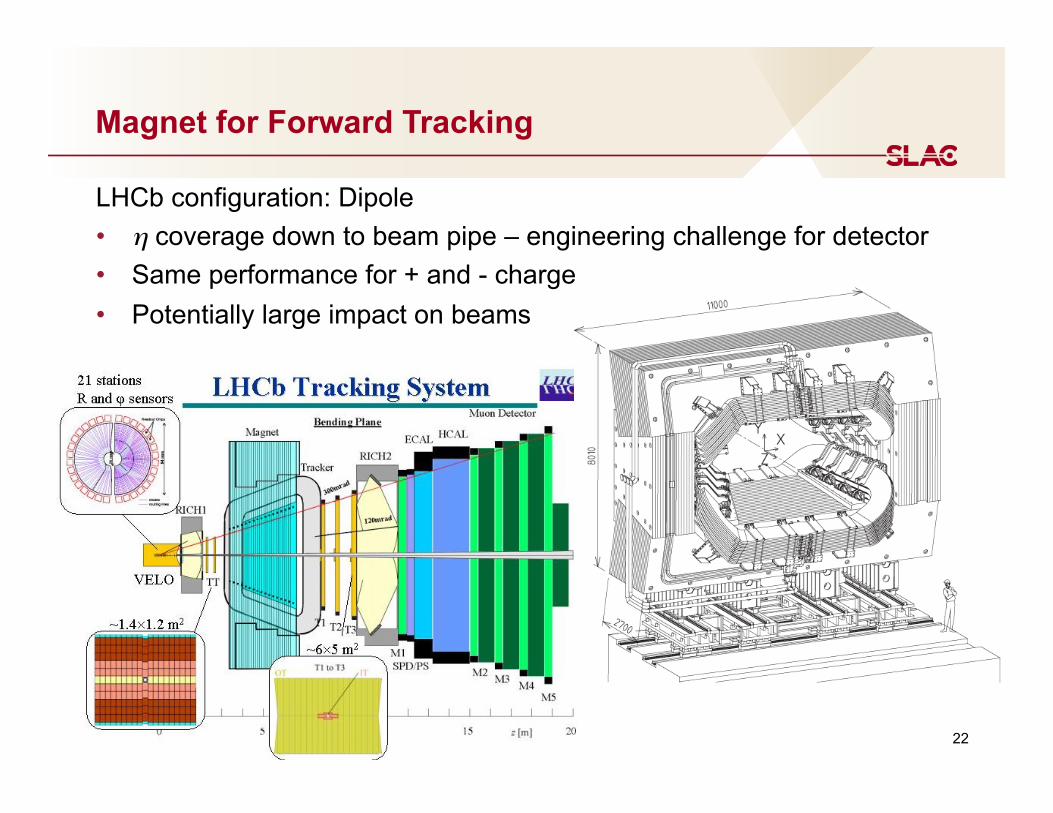
LHCb configuration: Dipole • η coverage down to beam pipe – engineering challenge for detector • Same performance for + and - charge • Potentially large impact on beams

23
Other Considerations
24
25
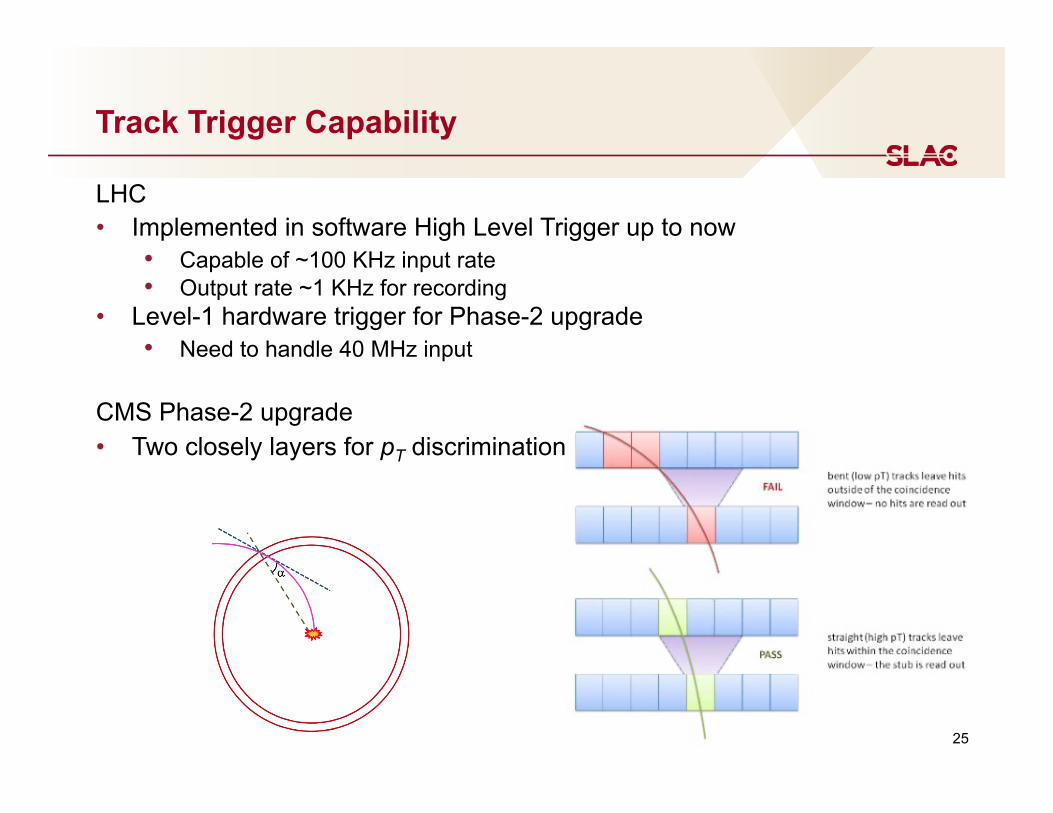
Track Trigger Capability
LHC • Implemented in software High Level Trigger up to now
• Capable of ~100 KHz input rate • Output rate ~1 KHz for recording
• Level-1 hardware trigger for Phase-2 upgrade • Need to handle 40 MHz input
CMS Phase-2 upgrade • Two closely layers for pT discrimination
26
Track Trigger Capability
Lepton collider • Low rates so software implementation is sufficient • How about FCC-ee (with crab waist) peak luminosity up
to ~ 9 x 1036 cm-2 sec-1
•
from http://tlep.web.cern.ch/content/machine-parameters
27
Typical Approach to Pattern Recognition
• Start with (small) subset of detector layers • Select hits based on consistency with being a track
• Subject to constraints as desired, such as IP pointing, minimum momentum and so on
• Fit track • Extrapolate / interpolate to other detector layers • Attach additional hits and iterate
28
TPC and Silicon Tracker
Figure from a person working on ILD detector concept
29
Why It Is Important to Consider (in Early Design Stage)
• Number of track candidates driven by all possible combinations of hits
• Number of combinations scales as high power of Nhit • Rapid increase at high hit rates • Sensitive to hard-to-predict background rates • Can be exacerbated by ill-conceived design
• All track candidates, accepted or discarded, are computationally expensive
• No easy fix once detector has been designed
30
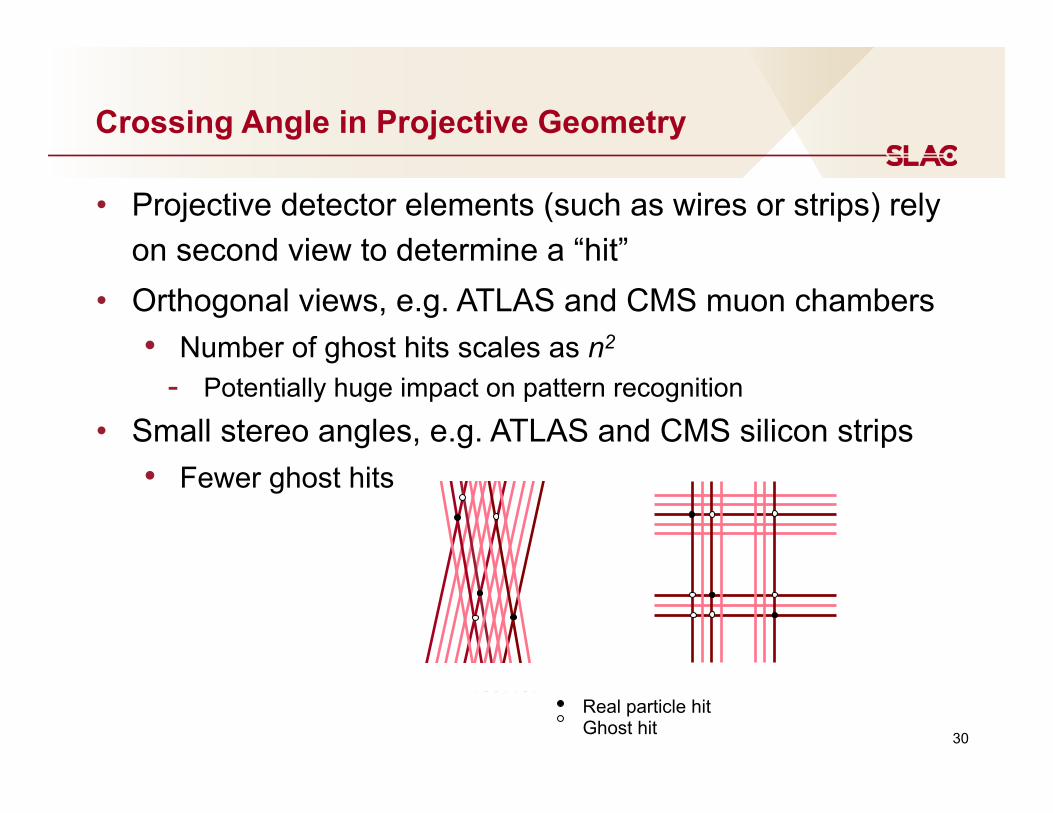
Crossing Angle in Projective Geometry
• Projective detector elements (such as wires or strips) rely on second view to determine a “hit”
• Orthogonal views, e.g. ATLAS and CMS muon chambers • Number of ghost hits scales as n2
- Potentially huge impact on pattern recognition
• Small stereo angles, e.g. ATLAS and CMS silicon strips • Fewer ghost hits
Real particle hit Ghost hit
31
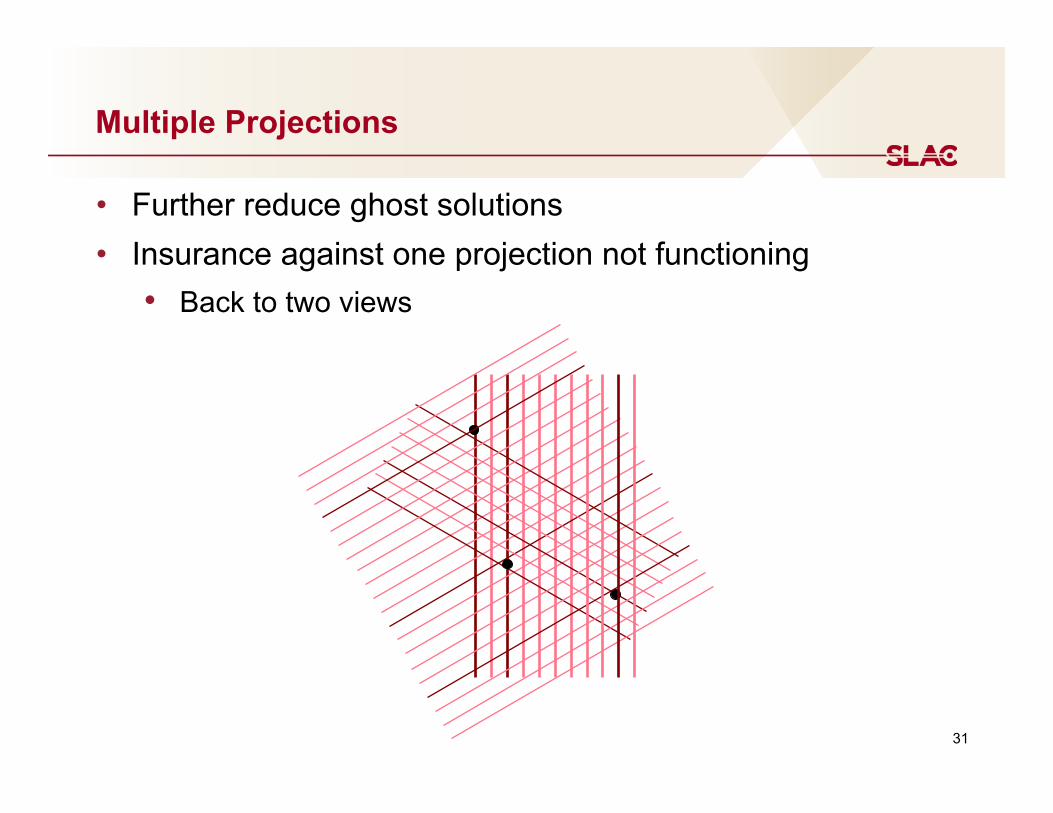
Multiple Projections
• Further reduce ghost solutions • Insurance against one projection not functioning
• Back to two views
32
Lookup Table: ATLAS FTK
• Use simulation to define track patterns • Match hits to pre-defined patterns • Execution can be extremely fast
• Custom hardware • Massive parallelism
• Reduced flexibility • Custom hardware • Pre-defined patterns
Not appropriate during detector design phase Can be an important tool in a real experiment
33
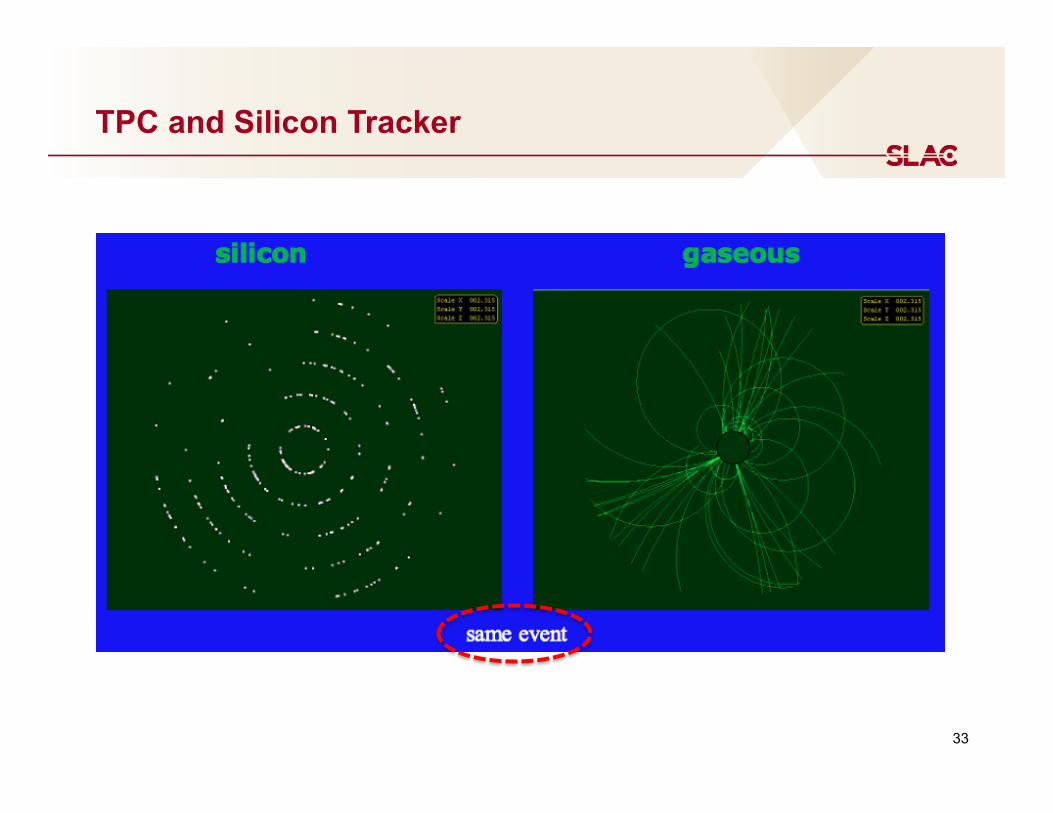
TPC and Silicon Tracker
Figure from a person working on ILD detector concept
34
Pattern Recognition in TPC and Silicon Tracker
Unfair visual comparison because • 3D in reality vs 2D in picture • Measurement resolution much better than picture
granularity • Algorithms much better than your eyes • CMS provides existence proof that silicon trackers can
work, even in dense hit environments
Still, TPC-like tracker • Pattern recognition likely to be simpler / more robust • More efficient for short tracks
35
Silicon Tracker Alignment
• Many independent modules with typical size (1-2 cm)2
• Large number of degrees of freedom • Hierarchy of structures, e.g.
• Tracker made up of cylindrical layers • Each layer made up of staves • Each stave made up of modules
• If these structures are well constructed and well understood, constraints can be applied to reduce number of degrees of freedom • Less special alignment data needed • Faster algorithmic convergence • Avoid false minimums
36
Examples from Silicon Tracker Alignment
ATLAS IBL stave bowing • Supposed to be free to slide on one end under differential
thermal expansion / contraction • Actual behavior now understood in measurements on
mock-ups and FEA calculations Silicon sensors curling up • Thin sensors to reduce multiple scattering • Flat modules now like potato chip
Lessons learned • “Reasonable” assumptions can be completely wrong • Sufficient redundancy to characterize unforeseen problem
37
TPC Field Distortion
Two sources of ions in TPC • From tracks traversing TPC volume • From avalanche in signal amplification region
• Minimized with good design Ions drift very slowly to central electrode Distorting TPC drift field for subsequent tracks Elaborate alignment and calibration become an essential part of the TPC design.
38
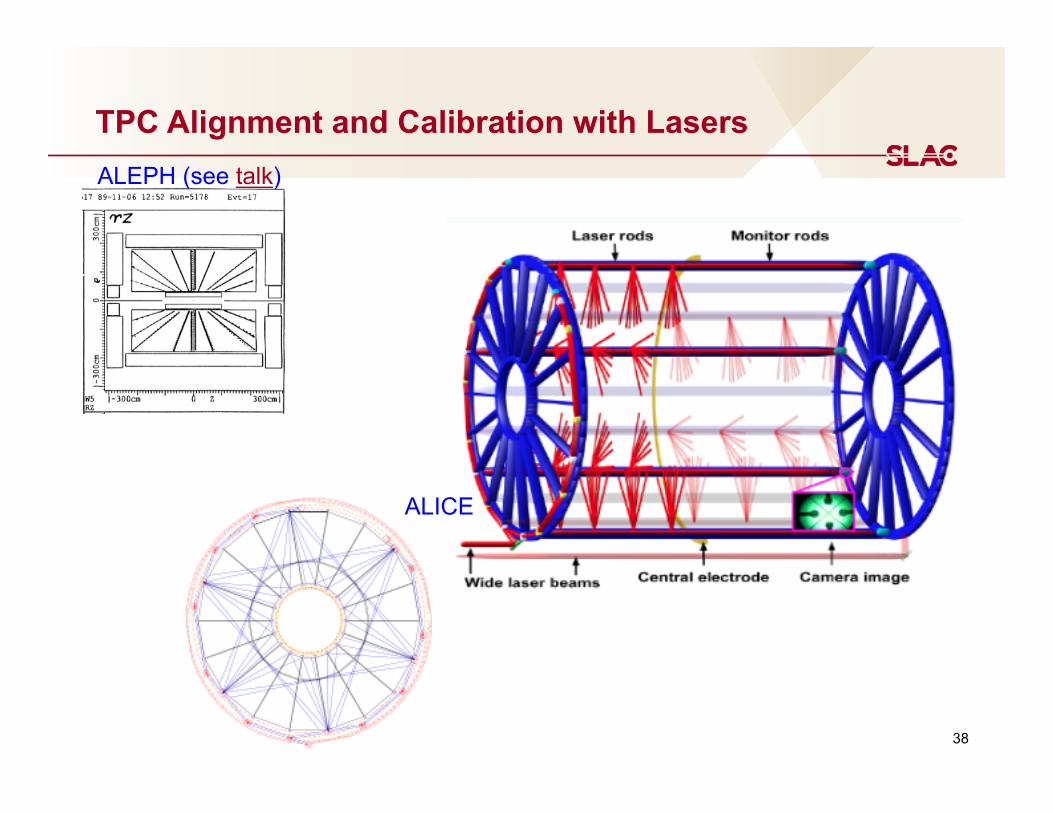
TPC Alignment and Calibration with Lasers ALEPH (see talk)
ALICE
39
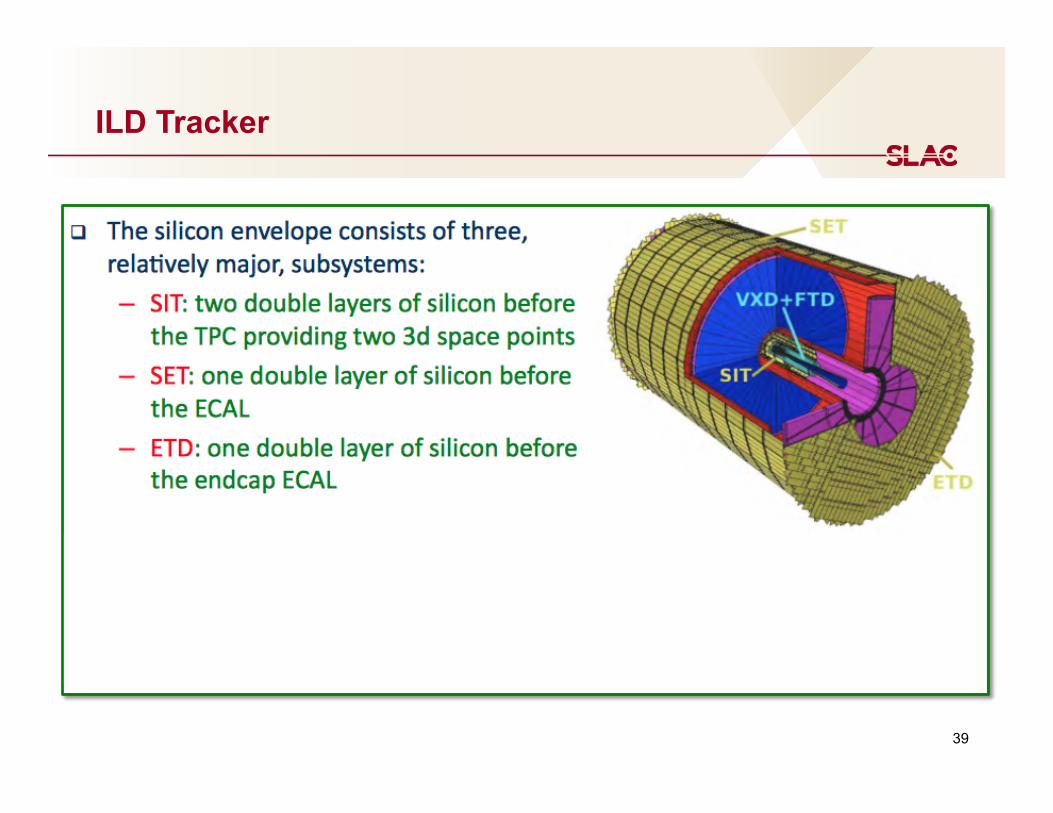
ILD Tracker
40
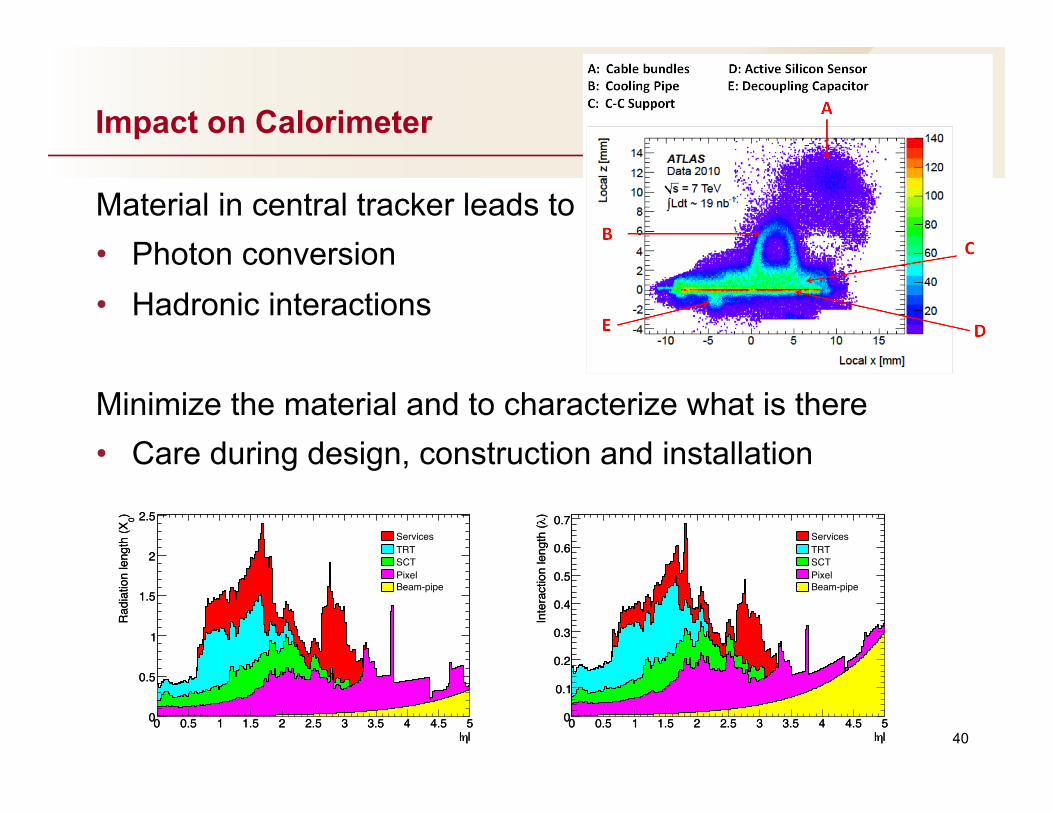
Impact on Calorimeter
Material in central tracker leads to • Photon conversion • Hadronic interactions Minimize the material and to characterize what is there • Care during design, construction and installation
|η|0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
) 0R
adia
tion
leng
th (X
0
0.5
1
1.5
2
2.5
|η|0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
) 0R
adia
tion
leng
th (X
0
0.5
1
1.5
2
2.5ServicesTRTSCTPixelBeam-pipe
|η|0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
)λ
Inte
ract
ion
leng
th (
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
|η|0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
)λ
Inte
ract
ion
leng
th (
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7ServicesTRTSCTPixelBeam-pipe
41
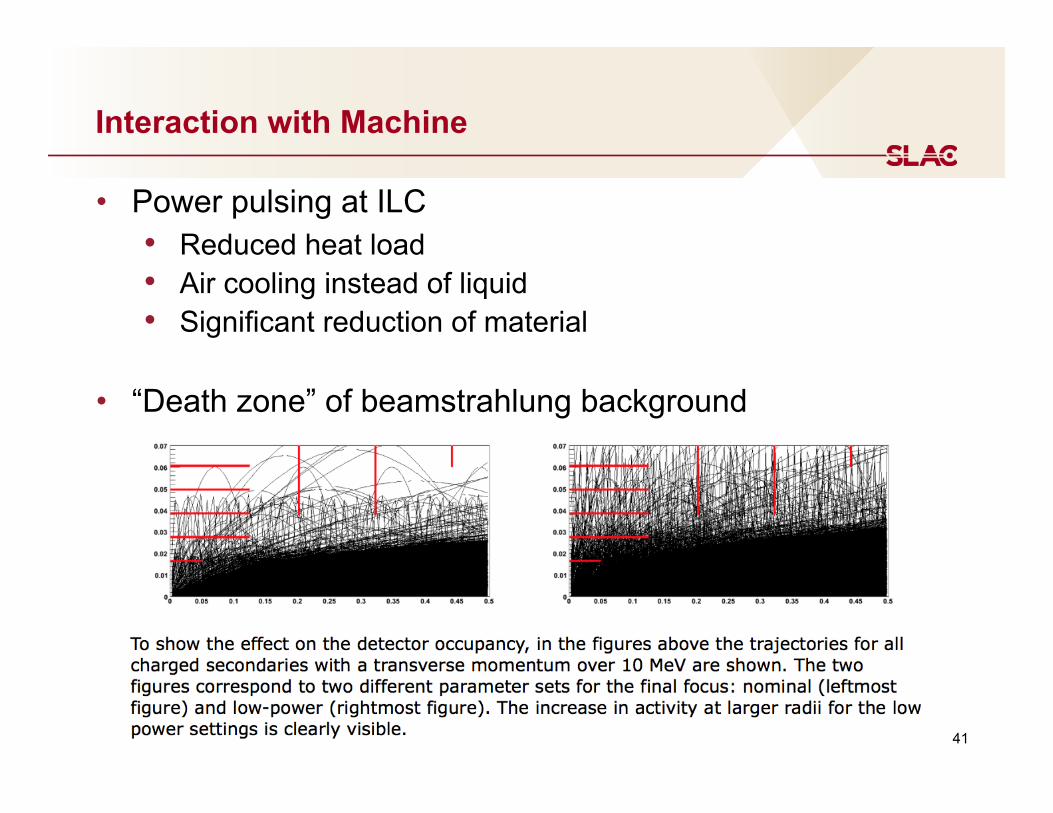
Interaction with Machine
• Power pulsing at ILC • Reduced heat load • Air cooling instead of liquid • Significant reduction of material
• “Death zone” of beamstrahlung background
42
Summary
• Easy and reliable resolution from Gluckstern formula • Detailed simulation when there is well developed design • Pay attention to the many things that can wreck a good-
on-paper design, e.g. • Material, including services • Detector stability and alignment • Pattern recognition and other software implications • Trigger capability as necessary • Impact on other systems
Think about the whole experiment