The Mysterious Actual Order of the Pole ˆof the Igusa ...robinson/reu/reu05/jmilestalk.pdf ·...
36
The Mysterious Actual Order of the Pole ρ of the Igusa Local Zeta Function Exploration of a Conjecture Joanna Miles [email protected] Mount Holyoke College Mathematics REU 2005 – p.1/14
Transcript of The Mysterious Actual Order of the Pole ˆof the Igusa ...robinson/reu/reu05/jmilestalk.pdf ·...

The Mysterious Actual Order ofthe Pole ρ of the Igusa Local Zeta
FunctionExploration of a Conjecture
Joanna [email protected]
Mount Holyoke College Mathematics REU 2005
– p.1/14

Overview• Our main interest: the poles of the Igusa local zeta function.
• Pole: a value for which the denominator of a function
vanishes.
• There are many candidate poles, with expected orders.
These are well understood.
• Not all candidate poles are actual poles. One special actual
pole, called ρ, is well understood for certain classes of
functions.
• For other classes of functions, very little is known about ρ
and its order.
• We studied one of the latter classes.
– p.2/14

Overview• Our main interest: the poles of the Igusa local zeta function.
• Pole: a value for which the denominator of a function
vanishes.
• There are many candidate poles, with expected orders.
These are well understood.
• Not all candidate poles are actual poles. One special actual
pole, called ρ, is well understood for certain classes of
functions.
• For other classes of functions, very little is known about ρ
and its order.
• We studied one of the latter classes.
– p.2/14

Overview• Our main interest: the poles of the Igusa local zeta function.
• Pole: a value for which the denominator of a function
vanishes.
• There are many candidate poles, with expected orders.
These are well understood.
• Not all candidate poles are actual poles. One special actual
pole, called ρ, is well understood for certain classes of
functions.
• For other classes of functions, very little is known about ρ
and its order.
• We studied one of the latter classes.
– p.2/14

Overview• Our main interest: the poles of the Igusa local zeta function.
• Pole: a value for which the denominator of a function
vanishes.
• There are many candidate poles, with expected orders.
These are well understood.
• Not all candidate poles are actual poles. One special actual
pole, called ρ, is well understood for certain classes of
functions.
• For other classes of functions, very little is known about ρ
and its order.
• We studied one of the latter classes.
– p.2/14

Overview• Our main interest: the poles of the Igusa local zeta function.
• Pole: a value for which the denominator of a function
vanishes.
• There are many candidate poles, with expected orders.
These are well understood.
• Not all candidate poles are actual poles. One special actual
pole, called ρ, is well understood for certain classes of
functions.
• For other classes of functions, very little is known about ρ
and its order.
• We studied one of the latter classes.
– p.2/14

Overview• Our main interest: the poles of the Igusa local zeta function.
• Pole: a value for which the denominator of a function
vanishes.
• There are many candidate poles, with expected orders.
These are well understood.
• Not all candidate poles are actual poles. One special actual
pole, called ρ, is well understood for certain classes of
functions.
• For other classes of functions, very little is known about ρ
and its order.
• We studied one of the latter classes.
– p.2/14

p-adic NumbersWhat is a p-adic integer?
• Fix p prime.• If m is a p-adic integer, ∃ a unique p-adic
expansion
m = a0 + a1p + a2p2 + a3p
3 + . . .
with 0 ≤ ai ≤ p − 1.• Zp: the set of all p-adic integers.
– p.3/14

The Igusa Local Zeta FunctionLet f(x) be a polynomial in n variables with integercoefficients.
Zf(s) =
∫
Znp
|f(x)|sp dx
where s ∈ C for Re(s) > 0.
Zf(s) is always a rational function of t = p−s (Igusa,
1975).
– p.4/14

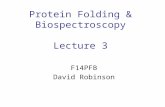
Structure of the Newton Polygon
Newton polygon Γ(f) forf(x, y) = x3y2 + x5 − xy3:
• Support points: (3, 2), (5, 0), (1, 3)
• Faces: Intersections of Γ(f) with
supporting hyperplanes. We have 6.
• Each face has associated
polynomial fτ .
• Cones: associated to the faces, form
a partition of the first quadrant.
• The cones give us regions of Zp for
integration.
– p.5/14

Structure of the Newton Polygon
Newton polygon Γ(f) forf(x, y) = x3y2 + x5 − xy3:
• Support points: (3, 2), (5, 0), (1, 3)
• Faces: Intersections of Γ(f) with
supporting hyperplanes. We have 6.
• Each face has associated
polynomial fτ .
• Cones: associated to the faces, form
a partition of the first quadrant.
• The cones give us regions of Zp for
integration.
– p.5/14

Structure of the Newton Polygon
Newton polygon Γ(f) forf(x, y) = x3y2 + x5 − xy3:
• Support points: (3, 2), (5, 0), (1, 3)
• Faces: Intersections of Γ(f) with
supporting hyperplanes. We have 6.
• Each face has associated
polynomial fτ .
• Cones: associated to the faces, form
a partition of the first quadrant.
• The cones give us regions of Zp for
integration.
– p.5/14

Structure of the Newton Polygon
Newton polygon Γ(f) forf(x, y) = x3y2 + x5 − xy3:
• Support points: (3, 2), (5, 0), (1, 3)
• Faces: Intersections of Γ(f) with
supporting hyperplanes. We have 6.
• Each face has associated
polynomial fτ .
• Cones: associated to the faces, form
a partition of the first quadrant.
• The cones give us regions of Zp for
integration.
– p.5/14

Structure of the Newton Polygon
Newton polygon Γ(f) forf(x, y) = x3y2 + x5 − xy3:
• Support points: (3, 2), (5, 0), (1, 3)
• Faces: Intersections of Γ(f) with
supporting hyperplanes. We have 6.
• Each face has associated
polynomial fτ .
• Cones: associated to the faces, form
a partition of the first quadrant.
• The cones give us regions of Zp for
integration.
– p.5/14

Calculation of Zf(s) Using the Newton Polygon
MethodLet f(x) be non-degenerate: it has no singular points mod p in
the p-adic units for any fτ (x).
Zf (s) =∑
τ face of Γ(f)
LτS∆τ
where
Lτ = p−n
(
(p − 1)n − p|Nτ |
(
ps − 1
ps+1 − 1
))
S∆τ=
∑
k∈Nn∩∆τ
p−σ(k)−m(k)s
σ(k) =Pn
i=1 ki
m(a) = infx∈Γ(f){a · x}
Nτ contains all x such that fτ (x) ≡ 0 mod p– p.6/14

Our Candidate Poles and Expected Orders
Pole: a value s for which the denominator of Zf (s) vanishes.
Candidate poles come from 2 places:
1. (ps+1 − 1) term in denominator of Lτ
2. Denominators of S∆τcome from (pσ(ai) − pm(ai)s) where ai
is a spanning vector of ∆τ .
The expected order of a candidate pole (other than −1) is the
maximal order of that pole from all S∆τ.
Of course, when we add terms, some of these poles disappear. . .
– p.7/14

Our Candidate Poles and Expected Orders
Pole: a value s for which the denominator of Zf (s) vanishes.
Candidate poles come from 2 places:
1. (ps+1 − 1) term in denominator of Lτ
2. Denominators of S∆τcome from (pσ(ai) − pm(ai)s) where ai
is a spanning vector of ∆τ .
The expected order of a candidate pole (other than −1) is the
maximal order of that pole from all S∆τ.
Of course, when we add terms, some of these poles disappear. . .
– p.7/14

Our Candidate Poles and Expected Orders
Pole: a value s for which the denominator of Zf (s) vanishes.
Candidate poles come from 2 places:
1. (ps+1 − 1) term in denominator of Lτ
2. Denominators of S∆τcome from (pσ(ai) − pm(ai)s) where ai
is a spanning vector of ∆τ .
The expected order of a candidate pole (other than −1) is the
maximal order of that pole from all S∆τ.
Of course, when we add terms, some of these poles disappear. . .
– p.7/14

Our Candidate Poles and Expected Orders
Pole: a value s for which the denominator of Zf (s) vanishes.
Candidate poles come from 2 places:
1. (ps+1 − 1) term in denominator of Lτ
2. Denominators of S∆τcome from (pσ(ai) − pm(ai)s) where ai
is a spanning vector of ∆τ .
The expected order of a candidate pole (other than −1) is the
maximal order of that pole from all S∆τ.
Of course, when we add terms, some of these poles disappear. . .
– p.7/14

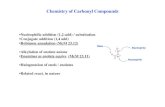
Our Favorite Candidate Pole: t0• (t0, . . . , t0): the unique point of
intersection of the boundary of
Γ(f) and the line (t, t, . . . , t).
• τ0: the face of lowest dimension
containing t0.
• ρ is a candidate pole for all f ,
where Re(ρ) = −1t0
.
• κ = codim(τ0): The expected orderof ρ.
– p.8/14

Our Favorite Candidate Pole: t0• (t0, . . . , t0): the unique point of
intersection of the boundary of
Γ(f) and the line (t, t, . . . , t).
• τ0: the face of lowest dimension
containing t0.
• ρ is a candidate pole for all f ,
where Re(ρ) = −1t0
.
• κ = codim(τ0): The expected orderof ρ.
– p.8/14

Our Favorite Candidate Pole: t0• (t0, . . . , t0): the unique point of
intersection of the boundary of
Γ(f) and the line (t, t, . . . , t).
• τ0: the face of lowest dimension
containing t0.
• ρ is a candidate pole for all f ,
where Re(ρ) = −1t0
.
• κ = codim(τ0): The expected orderof ρ.
– p.8/14

Our Favorite Candidate Pole: t0• (t0, . . . , t0): the unique point of
intersection of the boundary of
Γ(f) and the line (t, t, . . . , t).
• τ0: the face of lowest dimension
containing t0.
• ρ is a candidate pole for all f ,
where Re(ρ) = −1t0
.
• κ = codim(τ0): The expected orderof ρ.
– p.8/14

Our Favorite Candidate Pole: t0• (t0, . . . , t0): the unique point of
intersection of the boundary of
Γ(f) and the line (t, t, . . . , t).
• τ0: the face of lowest dimension
containing t0.
• ρ is a candidate pole for all f ,
where Re(ρ) = −1t0
.
• κ = codim(τ0): The expected orderof ρ.
– p.8/14

When t0 Gives an Actual PoleTake f(x) such that:
• f(x) non-degenerate wrt the faces of Γ(f)
• f(0) = 0
• ∂f/∂xi(0) = 0 ∀i
Then:
– p.9/14

When t0 Gives an Actual PoleTake f(x) such that:
• f(x) non-degenerate wrt the faces of Γ(f)
• f(0) = 0
• ∂f/∂xi(0) = 0 ∀i
Then:
If t0 > 1 −→ ρ is an actual pole of the expected order,
κ, for p large enough. (PROVEN)
– p.9/14

When t0 Gives an Actual PoleTake f(x) such that:
• f(x) non-degenerate wrt the faces of Γ(f)
• f(0) = 0
• ∂f/∂xi(0) = 0 ∀i
Then:
If t0 < 1 and no vertex of τ0 ∈ {0, 1, 2}n −→ ρ is an
actual pole for p large enough. (PROVEN)
– p.9/14

When t0 Gives an Actual PoleTake f(x) such that:
• f(x) non-degenerate wrt the faces of Γ(f)
• f(0) = 0
• ∂f/∂xi(0) = 0 ∀i
Then:
If t0 < 1 and τ0 has a vertex in {0, 1, 2}n −→ ρ is
an actual pole for p large enough. (CONJECTURE:
Hoornaert)
– p.9/14

When t0 Gives an Actual PoleTake f(x) such that:
• f(x) non-degenerate wrt the faces of Γ(f)
• f(0) = 0
• ∂f/∂xi(0) = 0 ∀i
Then:
If t0 < 1 and τ0 has a vertex in {0, 1, 2}n −→ ρ is anactual pole for p large enough. (CONJECTURE:Hoornaert)
This is the class of examples we studied. There are no
known counterexamples to the conjecture.
– p.9/14

Cancellation and Actual Orders• Almost nothing is known about the order of ρ as
a pole for this class of functions.• Often, actual order < expected order. Sometimes
it is much less.Our Conjecture: If we understood what causeslow order, we could force more cancellation, andeliminate all terms that give ρ as a pole. Thiswould provide a counterexample.
• We studied examples in 3 and 4 variables andexamined the actual order of ρ as a pole.
– p.10/14

An Example
f(x, y, z) = xy+z2
• t0 = 23
< 1
• τ0 is a line between (1, 1, 0) and
(0, 0, 2), with dimension 1.
• Re(ρ) = −32
and expected order
is 2.
• Zf (s) = −(−p3+t)(p−1)(−p3+t2)(−p+t)
• Actual order of ρ is 1.
• Here we have order less than ex-pected.
– p.11/14

An Example
f(x, y, z) = xy+z2
• t0 = 23
< 1
• τ0 is a line between (1, 1, 0) and
(0, 0, 2), with dimension 1.
• Re(ρ) = −32
and expected order
is 2.
• Zf (s) = −(−p3+t)(p−1)(−p3+t2)(−p+t)
• Actual order of ρ is 1.
• Here we have order less than
expected.
• If we sum all S∆τLτ , where ρ has
order 2 in S∆τ, we get no cancel-
lation.– p.11/14

An Example
f(x, y, z) = xy+z2
• t0 = 23
< 1
• τ0 is a line between (1, 1, 0) and
(0, 0, 2), with dimension 1.
• Re(ρ) = −32
and expected order
is 2.
• Zf (s) = −(−p3+t)(p−1)(−p3+t2)(−p+t)
• Actual order of ρ is 1.
• Here we have order less than
expected.
• When we sum S∆τfor all ∆τ ⊂
∆τ0 , we do have cancellation!
– p.11/14

What We’ve Learned• We still know little about the orders of ρ as a pole
for our class of functions.• The cancellation is not “nice”: it does not come
just from the S∆τterms, nor does it usually have
an obvious algebraic source.• Studying dimensions 4 and higher will give
opportunities for more cancellation, and willprovide the most interesting examples.
– p.12/14

Conclusion: Our Conjectures• Is Hoornaert’s conjecture true?• If not, can we find a counterexample by studying
the sources of cancellation in Zf(s)?• We expect that the actual order of ρ is related to
the structure of Γ(f), particularly to ∆τ0and the
surrounding cones.• If counterexamples exist, what is the example of
lowest dimension?• We know ρ is always a candidate pole. The
question: Can enough terms cancel that ρ is notan actual pole?
– p.13/14

ThanksMany thanks go out to:
• Kathleen Hoornaert for her work on the IgusaLocal Zeta Function, and her program Polygusawhich helped with our computations.
• The National Science Foundation for their grant(#DMS-0353700) to support this research.
• Professor Margaret Robinson, for her advisingand support.
• Professor Jessica Sidman and my fellow studentsat the summer 2005 Mount Holyoke Math REU,for all of their encouragement and help.
– p.14/14