The BABAR - University of Notre Damecjessop/research/overview/babar_detector.pdfBucking Coil...
119
arXiv:hep-ex/0105044 v1 16 May 2001 1 The B A B AR Detector The B A B AR Collaboration B A B AR, the detector for the SLAC PEP-II asymmetric e + e - B Factory operating at the Υ (4S) resonance, was designed to allow comprehensive studies of CP -violation in B-meson decays. Charged particle tracks are measured in a multi-layer silicon vertex tracker surrounded by a cylindrical wire drift chamber. Electromagnetic showers from electrons and photons are detected in an array of CsI crystals located just inside the solenoidal coil of a superconducting magnet. Muons and neutral hadrons are identified by arrays of resistive plate chambers inserted into gaps in the steel flux return of the magnet. Charged hadrons are identified by dE/dx measurements in the tracking detectors and in a ring-imaging Cherenkov detector surrounding the drift chamber. The trigger, data acquisition and data-monitoring systems , VME- and network-based, are controlled by custom-designed online software. Details of the layout and performance of the detector components and their associated electronics and software are presented. 1. Introduction The primary physics goal of the B A B AR ex- periment is the systematic study of CP -violating asymmetries in the decay of neutral B mesons to CP eigenstates. Secondary goals are precision measurements of decays of bottom and charm mesons and of τ leptons, and searches for rare processes that become accessible with the high luminosity of the PEP-II B Factory [1]. The de- sign of the detector is optimized for CP violation studies, but it is also well suited for these other physics topics. The scientific goals of the B A B AR experiment were first presented in the Letter of Intent [2] and the Technical Design Report [3]; detailed physics studies have been documented in the B A B AR Physics Book [4] and earlier work- shops [5]. The PEP-II B Factory is an asymmetric e + e - collider designed to operate at a luminosity of 3 × 10 33 cm -2 s -1 and above, at a center-of- mass energy of 10.58 GeV, the mass of the Υ (4S) resonance. This resonance decays exclusively to B 0 B 0 and B + B - pairs and thus provides an ideal laboratory for the study of B mesons. In PEP- II, the electron beam of 9.0 GeV collides head- on with the positron beam of 3.1 GeV resulting in a Lorentz boost to the Υ (4S) resonance of βγ =0.56. This boost makes it possible to recon- struct the decay vertices of the two B mesons, to determine their relative decay times, and thus to measure the time dependence of their decay rates. The crucial test of CP invariance is a comparison of the time-dependent decay rates for B 0 and B 0 to a self-conjugate state. For the cleanest exper- imental test, this requires events in which one B meson decays to a CP eigenstate that is fully re- constructed and the other B meson is tagged as a B 0 or a B 0 by its decay products: a charged lepton, a charged kaon, or other flavor sensitive features such as a low momentum charged pion from a D * decay. The very small branching ratios of B mesons to CP eigenstates, typically 10 -4 , the need for full reconstruction of final states with two or more charged particles and several π 0 s, plus the need to tag the second neutral B, place stringent re- quirements on the detector, which should have • a large and uniform acceptance down to small polar angles relative to the boost di- rection; • excellent reconstruction efficiency for charged particles down to 60MeV /c and for photons to 20 MeV; • very good momentum resolution to separate small signals from background;
Transcript of The BABAR - University of Notre Damecjessop/research/overview/babar_detector.pdfBucking Coil...

arX
iv:h
ep-e
x/01
0504
4 v1
16
May
200
11
The BABAR Detector
The BABAR Collaboration
BABAR, the detector for the SLAC PEP-II asymmetric e+e− B Factory operating at the Υ (4S) resonance, wasdesigned to allow comprehensive studies of CP -violation in B-meson decays. Charged particle tracks are measuredin a multi-layer silicon vertex tracker surrounded by a cylindrical wire drift chamber. Electromagnetic showersfrom electrons and photons are detected in an array of CsI crystals located just inside the solenoidal coil of asuperconducting magnet. Muons and neutral hadrons are identified by arrays of resistive plate chambers insertedinto gaps in the steel flux return of the magnet. Charged hadrons are identified by dE/dx measurements in thetracking detectors and in a ring-imaging Cherenkov detector surrounding the drift chamber. The trigger, dataacquisition and data-monitoring systems , VME- and network-based, are controlled by custom-designed onlinesoftware. Details of the layout and performance of the detector components and their associated electronics andsoftware are presented.
1. Introduction
The primary physics goal of the BABAR ex-periment is the systematic study of CP -violatingasymmetries in the decay of neutral B mesonsto CP eigenstates. Secondary goals are precisionmeasurements of decays of bottom and charmmesons and of τ leptons, and searches for rareprocesses that become accessible with the highluminosity of the PEP-II B Factory [1]. The de-sign of the detector is optimized for CP violationstudies, but it is also well suited for these otherphysics topics. The scientific goals of the BABAR
experiment were first presented in the Letter ofIntent [2] and the Technical Design Report [3];detailed physics studies have been documentedin the BABAR Physics Book [4] and earlier work-shops [5].
The PEP-II B Factory is an asymmetric e+e−
collider designed to operate at a luminosity of3 × 1033 cm−2s−1 and above, at a center-of-mass energy of 10.58 GeV, the mass of the Υ (4S)resonance. This resonance decays exclusively toB0B0 and B+B− pairs and thus provides an ideallaboratory for the study of B mesons. In PEP-II, the electron beam of 9.0 GeV collides head-on with the positron beam of 3.1 GeV resultingin a Lorentz boost to the Υ (4S) resonance ofβγ = 0.56. This boost makes it possible to recon-
struct the decay vertices of the two B mesons, todetermine their relative decay times, and thus tomeasure the time dependence of their decay rates.The crucial test of CP invariance is a comparisonof the time-dependent decay rates for B0 and B0
to a self-conjugate state. For the cleanest exper-imental test, this requires events in which one Bmeson decays to a CP eigenstate that is fully re-constructed and the other B meson is tagged asa B0 or a B0 by its decay products: a chargedlepton, a charged kaon, or other flavor sensitivefeatures such as a low momentum charged pionfrom a D∗ decay.
The very small branching ratios of B mesons toCP eigenstates, typically 10−4, the need for fullreconstruction of final states with two or morecharged particles and several π0s, plus the needto tag the second neutral B, place stringent re-quirements on the detector, which should have
• a large and uniform acceptance down tosmall polar angles relative to the boost di-rection;
• excellent reconstruction efficiency forcharged particles down to 60 MeV/c and forphotons to 20 MeV;
• very good momentum resolution to separatesmall signals from background;

2
Scale
BABAR Coordinate System
0 4m
CryogenicChimney
Magnetic Shieldfor DIRC
Bucking Coil
CherenkovDetector(DIRC)
SupportTube
e– e+
Q4Q2
Q1
B1
Floor
yx
z1149 1149
InstrumentedFlux Return (IFR))
BarrelSuperconducting
Coil
ElectromagneticCalorimeter (EMC)
Drift Chamber(DCH)
Silicon VertexTracker (SVT)
IFREndcap
ForwardEnd Plug
1225
810
1375
3045
3500
3-20018583A50
1015 1749
4050
370
I.P.
Detector CL
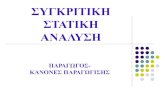
Figure 1. BABAR detector longitudinal section.
• excellent energy and angular resolution forthe detection of photons from π0and η0 de-cays, and from radiative decays in the rangefrom 20 MeV to 4 GeV;
• very good vertex resolution, both transverseand parallel to the beam direction;
• efficient electron and muon identification,with low misidentification probablities forhadrons. This feature is crucial for taggingthe B flavor, for the reconstruction of char-monium states, and is also important forthe study of decays involving leptons;
• efficient and accurate identification ofhadrons over a wide range of momenta for
B flavor-tagging, and for the reconstructionof exclusive states; modes such as B0 →K±π∓ or B0 → π+π−, as well as in charmmeson and τ decays;
• a flexible, redundant, and selective triggersystem;
• low-noise electronics and a reliable, highbandwidth data-acquisition and control sys-tem;
• detailed monitoring and automated calibra-tion;
• an online computing and network systemthat can control, process, and store the ex-pected high volume of data; and

3
IFR Barrel
CutawaySection
ScaleBABAR Coordinate System
y
xz
DIRC
DCH
SVT
3500
CornerPlates
Gap FillerPlates
0 4m
SuperconductingCoil
EMC
IFR CylindricalRPCs
EarthquakeTie-down
EarthquakeIsolator
Floor
3-20018583A51
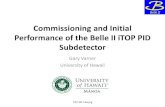
Figure 2. BABAR detector end view.
• detector components that can tolerate sig-nificant radiation doses and operate reliablyunder high-background conditions.
To reach the desired sensitivity for the most in-teresting measurements, data sets of order 108 Bmesons will be needed. For the peak cross sectionat the Υ (4S) of about 1.1 nb, this will require anintegrated luminosity of order 100 fb−1 or threeyears of reliable and highly efficient operation ofa detector with state-of-the art capabilities.
In the following, a brief overview of the princi-pal components of the detector, the trigger, thedata-acquisition, and the online computing andcontrol system is given. This overview is followedby brief descriptions of the PEP-II interaction re-gion, the beam characteristics, and of the impactof the beam generated background on the design
and operation of the detector. Finally, a detailedpresentation of the design, construction, and per-formance of all BABAR detector systems is pro-vided.
2. Detector Overview
The BABAR detector was designed and built bya large international team of scientists and en-gineers. Details of its original design are docu-mented in the Technical Design Report [3], issuedin 1995.
Figure 1 shows a longitudinal section throughthe detector center, and Figure 2 shows an endview with the principal dimensions. The detectorsurrounds the PEP-II interaction region. To max-imize the geometric acceptance for the boostedΥ (4S) decays, the whole detector is offset rela-

4
tive to the beam-beam interaction point (IP) by0.37 m in the direction of the lower energy beam.
The inner detector consists of a silicon ver-tex tracker, a drift chamber, a ring-imagingCherenkov detector, and a CsI calorimeter. Thesedetector systems are surrounded by a supercon-ducting solenoid that is designed for a field of1.5 T. The steel flux return is instrumented formuon and neutral hadron detection. The polarangle coverage extends to 350 mrad in the forwarddirection and 400 mrad in the backward direction,defined relative to the high energy beam. As in-dicated in the two drawings, the right handed co-ordinate system is anchored on the main trackingsystem, the drift chamber, with the z-axis coin-ciding with its principal axis. This axis is offsetrelative to the beam axis by about 20 mrad in thehorizontal plane. The positive y-axis points up-ward and the positive x-axis points away from thecenter of the PEP-II storage rings.
The detector is of compact design, its trans-verse dimension being constrained by the 3.5 m el-evation of the beam above the floor. The solenoidradius was chosen by balancing the physics re-quirements and performance of the drift chamberand calorimeter against the total detector cost.As in many similar systems, the calorimeter wasthe most expensive single system and thus consid-erable effort was made to minimize its total vol-ume without undue impact on the performanceof either the tracking system or the calorimeteritself. The forward and backward acceptance ofthe tracking system are constrained by compo-nents of PEP-II, a pair of dipole magnets (B1)followed by a pair of quadrupole magnets (Q1).The vertex detector and these magnets are placedinside a support tube (4.5 m long and 0.217 m in-ner diameter) that is cantilevered from beamlinesupports. The central section of this tube is fab-ricated from a carbon-fiber composite.
Since the average momentum of charged par-ticles produced in B-meson decay is less than1 GeV/c, the precision of the measured trackparameters is heavily influenced by multipleCoulomb scattering. Similarly, the detection effi-ciency and energy resolution of low energy pho-tons are severely impacted by material in frontof the calorimeter. Thus, special care has been
(rad)θ Polar Angle0 0.5 1 1.5 2 2.5 3
) 0
Mat
eria
l (X
10-2
10-1
1
EMC
DRC
DCH
SVT
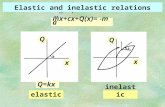
Figure 3. Amount of material (in units of radia-tion lengths) which a high energy particle, origi-nating from the center of the coordinate systemat a polar angle θ, traverses before it reaches thefirst active element of a specific detector system.
taken to keep material in the active volume ofthe detector to a minimum. Figure 3 shows thedistribution of material in the various detectorsystems in units of radiation lengths. Each curveindicates the material that a high energy particletraverses before it reaches the first active elementof a specific detector system.
2.1. Detector ComponentsAn overview of the coverage, the segmentation,
and performance of the BABAR detector systemsis presented in Table 1.
The charged particle tracking system is made oftwo components, the silicon vertex tracker (SVT)and the drift chamber (DCH).
The SVT has been designed to measure anglesand positions of charged particles just outside thebeam pipe. The SVT is composed of five layersof double-sided silicon strip detectors that are as-sembled from modules with readout at each end,thus reducing the inactive material in the accep-tance volume. The inner three layers primarilyprovide position and angle information for themeasurement of the vertex position. They aremounted as close to the water-cooled berylliumbeam pipe as practical, thus minimizing the im-

5
pact of multiple scattering in the beam pipe onthe extrapolation to the vertex. The outer twolayers are at much larger radii, providing the co-ordinate and angle measurements needed for link-ing SVT and DCH tracks.
The principal purpose of the DCH is the mo-mentum measurement for charged particles. Italso supplies information for the charged particletrigger and a measurement of dE/dx for particleidentification. The DCH is of compact design,with 40 layers of small, approximately hexagonalcells. Longitudinal information is derived fromwires placed at small angles to the principal axis.By choosing low-mass wires, and a helium-basedgas mixture the multiple scattering inside theDCH is minimized. The readout electronics aremounted on the backward endplate of the cham-ber, minimizing the amount of material in frontof the calorimeter endcap.
The DIRC, the detector of internally reflectedCherenkov light, is a novel device providing sep-aration of pions and kaons from about 500 MeV/cto the kinematic limit of 4.5 GeV/c. Cherenkovlight is produced in 4.9 m long bars of syntheticfused silica of rectangular cross section, 1.7 cm×3.5 cm, and transported by total internal reflec-tion, preserving the angle of emission, to an ar-ray of photomultiplier tubes. This array formsthe backward wall of a toroidal water tank that islocated beyond the backward end of the magnet.Images of the Cherenkov rings are reconstructedfrom the position and time of arrival of the signalsin the photomultiplier tubes.
The electromagnetic calorimeter (EMC) is de-signed to detect electromagnetic showers with ex-cellent energy and angular resolution over the en-ergy range from 20 MeV to 4 GeV. This coverageallows the detection of low energy π0s and η0sfrom B decays and higher energy photons andelectrons from electromagnetic, weak, and radia-tive processes. The EMC is a finely segmentedarray of projective geometry made of thalliumdoped cesium iodide (CsI(Tl)) crystals. The crys-tals are arranged in modules that are supportedindividually from an external support structure.This structure is built in two sections, a barreland a forward endcap. To obtain the desired res-olution, the amount of material in front of and in-
between the crystals is held to a minimum. Theindividual crystals are read out by pairs of siliconPIN diodes. Low noise analog circuits and fre-quent, precise calibration of the electronics andenergy response over the full dynamic range arecrucial for maintaining the desired performance.
The instrumented flux return (IFR) is designedto identify muons and to detect neutral hadrons.For this purpose, the magnet flux return steel inthe barrel and the two end doors is segmentedinto layers, increasing in thickness from 2 cm onthe inside to 10 cm at the outside. Between thesesteel absorbers, single gap resistive plate cham-bers (RPCs) are inserted which detect stream-ers from ionizing particles via external capacitivereadout strips. There are 19 layers of RPCs inthe barrel sectors and 18 layers in the end doors.Two additional cylindrical layers of RPCs withfour readout planes are placed at a radius justinside the magnet cryostat to detect particles ex-iting the EMC.
2.2. Electronics, Trigger, Data Acquisitionand Online Computing
The electronics, trigger, data acquisition, andonline computing represent a collection of tightlycoupled hardware and software systems. Thesesystems were designed to maximize the physicsdata acceptance, maintainability, and reliabil-ity while managing complexity, and minimizingdeadtime, and cost.
• Front-End Electronics (FEE) assemblies,located on the detector, consist of signalprocessing and digitization electronics alongwith the data transfer via optical fiber tothe data acquisition system.
• A robust and flexible two-level trigger copeswith the full beam-beam interaction rate.The first level, Level 1 (L1), is implementedin hardware, the other, Level 3 (L3), in soft-ware. Provision is made for an intermediatetrigger (Level 2) should severe conditionsrequire additional sophistication.
• The Online Dataflow (ODF), handles digi-tized data from the FEE through the eventbuilding. ODF includes the fast control andtiming system (FCTS).

6
Table 1Overview of the coverage, segmentation, and performance of the BABAR detector systems. The nota-tion (C), (F), and (B) refers to the central barrel, forward and backward components of the system,respectively. The detector coverage in the laboratory frame is specified in terms of the polar angles θ1
(forward) and θ2 (backward). The number of readout channels is listed. The dynamic range (resolution)of the FEE circuits is specified for pulse height (time) measurements by an ADC (TDC) in terms of thenumber of bits (nsec). Performance numbers are quoted for 1 GeV/c particles, except where noted. Theperformances for the SVT and DCH are quoted for a combined Kalman fit (for the definition of the trackparameters, see Section 7.)
θ1 No. ADC TDC No.System (θ2) Channels (bits) (ns) Layers Segmentation Performance
SVT 20.1 150K 4 - 5 50-100 µm r − φ σd0 = 55µm(-29.8) 100-200 µm z σz0 = 65µm
DCH 17.2 7,104 8 2 40 6-8 mm σφ = 1 mrad(-27.4) drift distance σtanλ = 0.001
σpt/pt = 0.47%σ(dE/dx) = 7.5%
DIRC 25.5 10,752 - 0.5 1 35 × 17 mm2 σθC = 2.5 mrad(-38.6) (r∆φ×∆r) per track
144 bars
EMC(C) 27.1 2× 5760 17–18 — 1 47 × 47 mm2 σE/E = 3.0%(-39.2) 5760 cystals σφ = 3.9 mrad
EMC(F) 15.8 2× 820 1 820 crystals σθ = 3.9 mrad(27.1)
IFR(C) 47 22K+2K 1 0.5 19+2 20-38 mm 90% µ± eff.(-57) 6-8% π± mis-id
IFR(F) 20 14.5K 18 28-38 mm (loose selection,(47) 1.5–3.0 GeV/c)
IFR(B) -57 14.5K 18 28-38 mm(-26)
• A farm of commercial Unix processors andassociated software, Online Event Process-ing (OEP), provides the realtime environ-ment within which complete events are pro-cessed by the L3 trigger algorithms, partialevent reconstruction is performed for mon-itoring, and event data are logged to an in-termediate storage.
• Software running on a second farm ofprocessors, Online Prompt Reconstruction(OPR), completely reconstructs all physicsevents, and performs monitoring and con-
stants generation in near realtime. Physicsevent data are transferred to an objectdatabase [6] and are made available for fur-ther analyses.
• An Online Run Control (ORC) system im-plements the logic for managing the state ofthe detector systems, starting and stoppingruns, and performing calibrations as well asproviding a user control interface.
• A system to control and monitor the detec-tor and its support systems, Online Detec-

7
tor Control (ODC), is based upon the Ex-perimental Physics Industrial Control Sys-tem (EPICS) toolbox [7]. This system in-cludes communication links with PEP-II.
2.2.1. ElectronicsAll BABAR detector systems share a common
electronics architecture. Event data from the de-tector flows through the FEE, while monitoringand control signals are handled by a separate,parallel system. All FEE systems are mounteddirectly on the detector to optimize performanceand to minimize the cable plant, thereby avoidingnoise pickup and ground loops in long signal ca-bles. All detector systems utilize standard BABAR
interfaces to the data acquisition electronics andsoftware.
Each FEE chain consists of an amplifier, a digi-tizer, a trigger latency buffer for storing data dur-ing the L1 trigger processing, and an event bufferfor storing data between the L1 Accept and sub-sequent transfer to the data acquisition system(see Figure 4). Custom integrated circuits (ICs)have been developed to perform the signal pro-cessing. The digital L1 latency buffers functionas fixed length data pipelines managed by com-mon protocol signals generated by the FCTS. Allde-randomizing event buffers function as FIFOs(first-in-first-out) capable of storing a fixed num-ber of events. During normal operation, analogsignal processing, digitization, and data readoutoccur continuously and simultaneously.
EventBuffer
L1 LatencyBuffer
to L1 trigger
AMP Digitizer
L1 trigger accept
Figure 4. Schematic diagram of the Front-EndElectronics (FEE). Analog signals arrive from theleft, proceed conditionally through the indicatedsteps and are injected into the remainder of thedata acquisition system.
Since many of the front-end circuits are inac-cessible or require significant downtime for ac-cess, stringent requirements were placed on reli-
ability. Most components underwent comprehen-sive mean time between failure (MTBF) studies.All circuits underwent a burn-in procedure priorto installation with the goal of minimizing initialfailure rates.
2.2.2. TriggerThe trigger system operates as a sequence of
two independent stages, the second conditionalupon the first. The L1 trigger is responsible forinterpreting incoming detector signals, recogniz-ing and removing beam-induced background to alevel acceptable for the L3 software trigger whichruns on a farm of commercial processors.
L1 consists of pipelined hardware processorsdesigned to provide an output trigger rate of<∼ 2 kHz. The L1 trigger selection is based on datafrom DCH, EMC, and IFR. The maximum L1 re-sponse latency for a given collision is 12µs. Basedon both the complete event and L1 trigger infor-mation, the L3 software algorithms select eventsof interest which are then stored for processing.The L3 output rate is administratively limited to120 Hz so as not to overload the downstream stor-age and processing capacity.
BABAR has no fast counters for triggering pur-poses, and bunch crossings are nearly continuousat a 4.2 ns spacing. Dedicated L1 trigger proces-sors receive data continuously clocked in from theDCH, EMC, and IFR detector systems. Theseprocessors produce clocked outputs to the fastcontrol system at 30 MHz, the time granularityof resultant L1 Accept signals. The arrival ofan L1 Accept signal by the data acquisition sys-tem causes a portion of each system’s L1 latencybuffer to be read out, ranging from about 500 nsfor the SVT to 4–16µs for the EMC. Absolutetiming information for the event, i.e., associatingan event with a particular beam crossing, is deter-mined offline, using DCH track segment timing,waveforms from the EMC, and accelerator timingfiducials.
2.2.3. Data Acquisitionand Online Computing
The data acquisition and computing systems,responsible for the transport of event data fromthe detector FEE to mass storage with a min-

8
imum of dead time are shown schematically inFigure 5. These systems also interface with thetrigger to enable calibrations and testing. Otherparts of these systems provide for the control andmonitoring of the detector and supporting facili-ties.
Hardware
The data acquisition system hardware consistsof VME crates, specialized VME-based proces-sors called readout modules (ROMs), the FCTS, aUnix processor farm, various server machines andan Ethernet network. A ROM consists of a Mo-torola MVME2306 PowerPC single board com-puter, event buffers, an interface to the FCTS,and a custom Personality Card that connectswith the FEE circuits via 1.2 Gbits/s fiber opticcables. The ROM provides the standard interfacebetween the detector specific FEE, the FCTS,and the event builder. There are 157 ROMs inthe system located in 19 physical VME cratesdivided into 24 logical crates by virtue of seg-mented backplanes. The FCTS system consistsof a VME crate plus individual Fast Control Dis-tribution Modules in each of the data acquisitionVME crates. The Unix processor farm consists of32 Sun workstations.
The detector monitoring and control systemconsists of a standard set of components, includ-ing Motorola MVME177 single-board computers,and other VME modules. With the exception ofthe solenoid magnet, which has its own controland monitoring, all BABAR detector componentsuse this system.
The online computing system relies on a com-plex of workstation consoles and servers with0.8 Tbytes of attached storage, all interconnectedwith switched 100 Mbits/s and 1 Gbits/s Ethernetnetworks. Multiple 1 Gbits/s Ethernet links con-nect the experimental hall with the SLAC com-puting center.
Online Dataflow (ODF)
The ODF software connects, controls and man-ages the flow of data in the acquisition hard-ware with little dead time. This code is di-vided between embedded processors in the ROMs
running the VxWorks [8] realtime operating sys-tem and Unix processors running the Solarisoperating system. ODF provides configurationand readout of the FEE over fiber links tothe ROMs; data transport, buffering, and eventbuilding from the ROMs to the Unix farm overa switched 100 Mbits/s Ethernet network; mask-ing and prescaling of L1 triggers; and logical par-titioning of DAQ hardware into multiple, inde-pendent data acquisition systems for parallel cal-ibrations and diagnostics. Additional feature ex-traction (FEX) code in the ROMs extracts phys-ical signals from the raw data, performs gain andpedestal correction, data sparsification, and dataformatting. Data from electronics calibrationsare accumulated in the ROMs, channel responsefunctions are evaluated, results are compared toreference data and subsequently applied in fea-ture extraction. Calibration data are stored in aconditions database.
Online Event Processing (OEP)
OEP receives and processes data from the ODFevent builder on each of the Unix processors.OEP orchestrates the following tasks: L3 triggeralgorithms; fast monitoring to assure data qual-ity; and logging the selected events to disk whilemerging the multiple data output streams to asingle file.
Online Prompt Reconstruction (OPR)
OPR bridges the online and offline systems [9].This system reads raw data recorded to disk byOEP and, operating on a farm of 150 Unix pro-cessors, selects physics events, performs completereconstruction, performs rolling calibrations, col-lects extensive monitoring data for quality assur-ance, and writes the result into an event store.A rolling calibration is the generation of recon-struction constants during normal event process-ing, which are then applied to the processing ofsubsequent data.
Online Detector Control (ODC)and Run Control (ORC)
The ODC system controls and extensivelymonitors the electronics, the environment, and

9
FrontEndElectronics
VME DataflowCrates
L1 TriggerProcessor
Fast Controland Timing
Event BldgL3 TriggerMonitoring
IntermediateEvent Store
dataeventdigitalraw
signalsanalog
signals
processeddigital
data
BABARdetector
trigger
24
L1 Accept, clocksand trigger data
linestrigger
Figure 5. Schematic diagram of the data acquisition.
assures the safety of the detector. Its implementa-tion is based on EPICS, providing detector-widestandardization for control and monitoring, diag-nostics and alarm handling. ODC also providescommunication with PEP-II and the magnet con-trol system. Monitoring data are archived in anambient database.
The ORC system ties together the various com-ponents of the online system and provides the op-erator with a single graphical interface to controldetector operation. Complex configurations arestored in a configuration database; keys to theconfiguration used for any run are stored alongwith the data. The event store, conditions, ambi-ent, and configuration databases are implementedin an object database [6], while other data arestored in a relational database.
3. The PEP II Storage Rings and TheirImpact on the BABAR Detector
3.1. PEP-II Storage RingsPEP-II is an e+e− storage ring system designed
to operate at a center of mass (c.m.) energyof 10.58 GeV, corresponding to the mass of theΥ (4S) resonance. The parameters of these en-ergy asymmetric storage rings are presented inTable 2. PEP-II has surpassed its design goals,both in terms of the instantaneous and the inte-grated daily luminosity, with significantly fewerbunches than anticipated. A detailed description
of the design and operational experience of PEP-II can be found in references [10] and [11].
Table 2PEP-II beam parameters. Values are given bothfor the design and for typical colliding beam oper-ation in the first year. HER and LER refer to thehigh energy e− and low energy e+ ring, respec-tively. σLx, σLy, and σLz refer to the horizontal,vertical, and longitudinal rms size of the luminousregion.
Parameters Design Typical
Energy HER/LER (GeV) 9.0/3.1 9.0/3.1Current HER/LER (A) 0.75/2.15 0.7/1.3# of bunches 1658 553-829Bunch spacing (ns) 4.2 6.3-10.5σLx (µm) 110 120σLy ( µm) 3.3 5.6σLz (mm) 9 9Luminosity (1033 cm−2s−1) 3 2.5Luminosity ( pb−1/d) 135 120
PEP-II typically operates on a 40–50 minutefill cycle. At the end of each fill, it takes aboutthree minutes to replenish the beams. After aloss of the stored beams, the beams are refilled inapproximately 10–15 minutes. BABAR divides thedata into runs, defined as periods of three hourduration or less during which beam and detector

10
conditions are judged to be stable. While mostof the data are recorded at the peak of the Υ (4S)resonance, about 12% are taken at a c.m. energy40 MeV lower to allow for studies of non-resonantbackground.
3.2. Impact of PEP-II on BABAR LayoutThe high beam currents and the large num-
ber of closely-spaced bunches required to producethe high luminosity of PEP-II tightly couple theissues of detector design, interaction region lay-out, and remediation of machine-induced back-ground. The bunches collide head-on and areseparated magnetically in the horizontal planeby a pair of dipole magnets (B1), followed bya series of offset quadrupoles. The tapered B1dipoles, located at ± 21 cm on either side of theIP, and the Q1 quadrupoles are permanent mag-nets made of samarium-cobalt placed inside thefield of the BABAR solenoid, while the Q2, Q4, andQ5 quadrupoles, located outside or in the fringefield of the solenoid, are standard iron magnets.The collision axis is off-set from the z-axis of theBABAR detector by about 20 mrad in the horizon-tal plane [12] to minimize the perturbation of thebeams by the solenoidal field.
The interaction region is enclosed by a water-cooled beam pipe of 27.9 mm outer radius, com-posed of two layers of beryllium (0.83 mm and0.53 mm thick) with a 1.48 mm water channel be-tween them. To attenuate synchrotron radiation,the inner surface of the pipe is coated with a 4µmthin layer of gold. In addition, the beam pipeis wrapped with 150µm of tantalum foil on ei-ther side of the IP, beyond z = +10.1 cm andz = −7.9 cm. The total thickness of the cen-tral beam pipe section at normal incidence cor-responds to 1.06% of a radiation length.
The beam pipe, the permanent magnets, andthe SVT were assembled and aligned, and thenenclosed in a 4.5 m-long support tube which spansthe IP. The central section of this tube was fabri-cated from a carbon-fiber epoxy composite witha thickness of 0.79% of a radiation length.
3.3. Monitoring of Beam ParametersThe beam parameters most critical for BABAR
performance are the luminosity, the energies of
the two beams, and the position, angles, and sizeof the luminous region.
3.3.1. LuminosityWhile PEP-II measures radiative Bhabha scat-
tering to provide a fast monitor of the relative lu-minosity for operations, BABAR derives the abso-lute luminosity offline from other QED processes,primarily e+e−, and µ+µ− pairs. The measuredrates are consistent and stable as a function oftime. For a data sample of 1 fb−1, the statisticalerror is less than 1%. The systematic uncertaintyon the relative changes of the luminosity is lessthan 0.5%, while the systematic error on the ab-solute value of the luminosity is estimated to beabout 1.5%. This error is currently dominated byuncertainties in the Monte Carlo generator andthe simulation of the detector. It is expected thatwith a better understanding of the efficiency, theoverall systematic error on the absolute value ofthe luminosity will be significantly reduced.
3.3.2. Beam EnergiesDuring operation, the mean energies of the
two beams are calculated from the total mag-netic bending strength (including the effects ofoff-axis quadrupole fields, steering magnets, andwigglers) and the average deviations of the ac-celerating frequencies from their central values.While the systematic uncertainty in the PEP-IIcalculation of the absolute beam energies is es-timated to be 5–10 MeV, the relative energy set-ting for each beam is accurate and stable to about1 MeV. The rms energy spreads of the LER andHER beams are 2.3 MeV and 5.5 MeV, respec-tively.
To ensure that data are recorded close to thepeak of the Υ (4S) resonance, the observed ratio ofBB enriched hadronic events to lepton pair pro-duction is monitored online. Near the peak of theresonance, a 2.5% change in the BB productionrate corresponds to a 2 MeV change in the c.m.energy, a value that is close to the tolerance towhich the energy of PEP-II can be held. How-ever, a drop in the BB rate does not distinguishbetween energy settings below or above the Υ (4S)peak. The sign of the energy change must be de-termined from other indicators. The best mon-

11
itor and absolute calibration of the c.m. energyis derived from the measured c.m. momentumof fully reconstructed B mesons combined withthe known B-meson mass. An absolute error of1.1 MeV is obtained for an integrated luminosityof 1 fb−1. This error is presently limited by theuncertainty in the B-meson mass [13] and by thedetector resolution.
The beam energies are necessary input for thecalculation of two kinematic variables that arecommonly used to separate signal from back-ground in the analysis of exclusive B-meson de-cays. These variables, which make optimum useof the measured quantities and are largely uncor-related, are Lorentz-invariants which can be eval-uated both in the laboratory and c.m. frames.
The first variable, ∆E, can be expressed inLorentz invariant form as
∆E = (2qBq0 − s)/2√s, (1)
where√s = 2E∗beam is the total energy of the
e+e− system in the c.m. frame, and qB and q0 =(E0, ~p0) are the Lorentz vectors representing themomentum of the B candidate and of the e+e−
system, q0 = qe+ + qe−. In the c.m. frame, ∆Etakes the familiar form
∆E = E∗B − E∗beam, (2)
here E∗B is the reconstructed energy of the B me-son. The ∆E distribution receives a sizable con-tribution from the beam energy spread, but isgenerally dominated by detector resolution.
The second variable is the energy-substitutedmass, mES, defined as mES
2 = q2B. In the lab-
oratory frame, mES can be determined from themeasured three-momentum ~pB of the B candi-date without explicit knowledge of the masses ofthe decay products:
mES =√
(s/2 + ~pB~·p0)2/E20 − p2
B. (3)
In the c.m. frame (~p0 = 0), this variable takes thefamiliar form
mES =√E∗2beam − p∗2B , (4)
where p∗B is the c.m. momentum of the B meson,derived from the momenta of its decay products,
2-2001 8583A36 Energy Substituted Mass (GeV/c2)
Eve
nts/
2M
eV/c
2
0
1000
2000
5.24 5.26 5.28 5.30
Figure 6. The energy-substituted mass for a sam-ple of 6,700 neutral B mesons reconstructed inthe final states D(∗)−π+, D(∗)−ρ+, D(∗)−a+
1 , andJ/ψK∗0. The background is extrapolated fromevents outside the signal region.
and the B-meson energy is substituted by E∗beam.Figure 6 shows the mES distribution for a sam-ple of fully reconstructed B mesons. The resolu-tion in mES is dominated by the spread in E∗beam,σE∗
beam= 2.6 MeV.
3.3.3. Beam DirectionThe direction of the beams relative to BABAR
is measured iteratively run-by-run using e+e− →e+e− and e+e− → µ+µ− events. The resultantuncertainty in the direction of the boost from thelaboratory to the c.m. frame, ~β, is about 1 mrad,dominated by alignment errors. This translatesinto an uncertainty of about 0.3 MeV in mES . ~βis consistent to within 1 mrad with the orienta-tion of the elongated beam spot (see below). It isstable to better than 1 mrad from one run to thenext.
3.3.4. Beam Size and PositionThe size and position of the luminous region are
critical parameters for the decay-time-dependentanalyses and their values are monitored contin-uously online and offline. The design values forthe size of the luminous region are presented inTable 2. The vertical size is too small to be mea-sured directly. It is inferred from the measuredluminosity, the horizontal size, and the beam cur-rents; it varies typically by 1–2µm.

12
The transverse position, size, and angles of theluminous region relative to the BABAR coordinatesystem are determined by analyzing the distribu-tion of the distance of closest approach to thez-axis of the tracks in well measured two-trackevents as a function of the azimuth φ. The lon-gitudinal parameters are derived from the lon-gitudinal vertex distribution of the two tracks.A combined fit to nine parameters (three aver-age coordinates, three widths, and three smallangles) converges readily, even after significantchanges in the beam position. The uncertain-ties in the average beam position are of the orderof a few µm in the transverse plane and 100µmalong the collision axis. Run-by-run variations inthe beam position are comparable to these mea-surement uncertainties, indicating that the beamsare stable over the period of a typical run. Thefit parameters are stored run-by-run in the con-ditions database. These measurements are alsochecked offline by measuring the primary verticesin multi-hadron events. The measured horizontaland longitudinal beam sizes, corrected for track-ing resolution, are consistent with those measuredby PEP-II.
3.4. Beam Background SourcesThe primary sources of steady-state accelera-
tor backgrounds are, in order of increasing im-portance: synchrotron radiation in the vicinity ofthe interaction region; interactions between thebeam particles and the residual gas in either ring;and electromagnetic showers generated by beam-beam collisions [14–16]. In addition, there areother background sources that fluctuate widelyand can lead to very large instantaneous rates,thereby disrupting stable operation.
3.4.1. Synchrotron RadiationSynchrotron radiation in nearby dipoles, the
interaction-region quadrupole doublets and theB1 separation dipoles generates many kW ofpower and is potentially a severe background.The beam orbits, vacuum-pipe apertures andsynchrotron-radiation masks have been designedsuch that most of these photons are channeledto a distant dump; the remainder are forced toundergo multiple scatters before they can en-
ter the BABAR acceptance. The remaining syn-chrotron radiation background is dominated byx-rays (scattered from tungsten tips of a mask)generated by beam tails in the high-field region ofthe HER low-β quadrupoles. This residual back-ground is relatively low and has not presentedsignificant problems.
3.4.2. Beam-Gas ScatteringBeam-gas bremsstrahlung and Coulomb scat-
tering off residual gas molecules cause beam par-ticles to escape the acceptance of the ring if theirenergy loss or scattering angle are sufficientlylarge. The intrinsic rate of these processes is pro-portional to the product of the beam current andthe residual pressure (which itself increases withcurrent). Their relative importance, as well as theresulting spatial distribution and absolute rate oflost particles impinging the vacuum pipe in thevicinity of the detector, depend on the beam op-tical functions, the limiting apertures, and theentire residual-pressure profile around the rings.The separation dipoles bend the energy-degradedparticles from the two beams in opposite direc-tions and consequently most BABAR detector sys-tems exhibit occupancy peaks in the horizontalplane, i.e., the LER background near φ = 0
and
HER background near φ = 180.
During the first few months of operation andduring the first month after a local venting ofthe machine, the higher pressures lead to signifi-cantly enhanced background from beam-gas scat-tering. The situation has improved significantlywith time due to scrubbing of the vacuum pipeby synchrotron radiation. Towards the end of thefirst year of data-taking, the dynamic pressure inboth rings had dropped below the design goal,and the corresponding background contributionswere much reduced. Nevertheless, beam-gas scat-tering remains the primary source of radiationdamage in the SVT and the dominant source ofbackground in all detectors systems, except forthe DIRC.
3.4.3. Luminosity BackgroundRadiative Bhabha scattering results in energy-
degraded electrons or positrons hitting aperturelimitations within a few meters of the IP and

13
spraying BABAR with electromagnetic shower de-bris. This background is directly proportionalto the instantaneous luminosity and thus is ex-pected to contribute an increasing fraction of thetotal background in the future. Already this isthe dominant background in the DIRC.
3.4.4. Background FluctuationsIn addition to these steady-state background
sources, there are instantaneous sources of radia-tion that fluctuate on diverse time scales:
• beam losses during injection,
• intense bursts of radiation, varying in du-ration from a few ms to several minutes,currently attributed to very small dust par-ticles, which become trapped in the beam,and
• non-Gaussian tails from beam-beam inter-actions (especially of the e+ beam) that arehighly sensitive to adjustments in collima-tor settings and ring tunes.
These effects typically lead to short periods ofhigh background and have resulted in a largenumber of BABAR-initiated beam aborts (see be-low).
3.5. Radiation Protectionand Monitoring
A system has been developed to monitor the in-stantaneous and integrated radiation doses, andto either abort the beams or to halt or limit therate of injection, if conditions become critical. Inaddition, DCH and IFR currents, as well as DIRCand IFR counting rates, are monitored; abnor-mally high rates signal critical conditions.
Radiation monitoring and protection systemsare installed for the SVT, the DCH electronics,and the EMC. The radiation doses are measuredwith silicon photodiodes. For the SVT, 12 diodesare arranged in three horizontal planes, at, above,and below the beam level, with four diodes in eachplane, placed at z = +12.1 cm and z = −8.5 cmand at a radial distance of 3 cm from the beamline [17]. The diode leakage current, after cor-rection for temperature and radiation damage ef-fects, is proportional to the dose rate. The four
0
200
400
600
-200 0 200Day of Year 2000
Dos
e In
tegr
al /
kRad
3-2001 8583A52
Dose Budget
HER (horiz)LER (horiz)HER+LER (non-horiz)
Figure 7. The integrated radiation dose as mea-sured by PIN diodes located at three differentpositions, showing contributions from the HER(φ = 180), and the LER (φ = 0) in the hori-zontal plane, and from both beams combined else-where. Also shown is the SVT radiation budgetfor the first 500 days of operation.
diodes in the middle are exposed to about tentimes more radiation than the others. These mid-plane diodes are connected to the beam abortsystem, while the remaining eight diodes at thetop and bottom are used to monitor the radia-tion dose delivered to the SVT. The accuracy ofthe measured average dose rate is better than 0.5mRad/s. The integrated dose, as measured bythe SVT diodes, is presented in Figure 7.
The radiation level at the DCH and the EMCis more than two orders of magnitude lower thanat the SVT. To amplify the signal, the PIN diodesfor the DCH and EMC are mounted on smallCsI(Tl) crystals (with a volume of about 10 cm3).These silicon diodes are installed in sets of four.Three sets are mounted on the front face of theendcap calorimeter and one set on the backwardendplate of the DCH, close to the readout elec-tronics. The signals of the four diodes in eachset are summed, amplified, and fed into the ra-diation protection electronics. Only one of thethree diode sets of the EMC is used at any giventime. The DCH and the EMC use identical hard-ware and decision algorithms. They limit injec-

14
tion rates whenever an instantaneous dose equiv-alent to about 1 Rad/day is exceeded.
The SVT employs a different strategy and cir-cuitry to assess whether the measured radiationlevels merit a beam abort or a reduction in single-beam injection rate. Every beam dump initi-ated by BABAR is followed by a 10–15 minuteperiod of injection with significant radiation ex-posure. Thus, to minimize the ratio of the in-tegrated radiation dose to the integrated lumi-nosity, it has been beneficial to tolerate transienthigh-dose events as long as the integrated doseremains less than the typical dose accumulatedduring injection. To differentiate between veryhigh instantaneous radiation and sustained highdose rates, trip thresholds are enforced on twodifferent time scales: an instantaneous dose of1 Rad accumulated over 1 ms, and an averageof 50 mRad/s measured over a 5-minute period.During injection, higher thresholds are imposed,since an aborted injection will delay the return totaking data.
Figure 8 shows the daily rate of beam abortsinitiated by the SVT protection diodes during theyear 2000. Initially, as many as 80 beam abortswere triggered per day, while the average for sta-ble operation was significantly below ten at theend of the run. The measures described above,combined with a significant reduction in largebackground fluctuations, have been very effectivein protecting the detector against radiation dam-age, as well increasing the combined live time ofthe machine and detector to greater than 75%.
3.6. Impact of Beam-GeneratedBackground on BABAR
Beam-generated backgrounds affect the detec-tor in multiple ways. They cause radiation dam-age to the detector components and the electron-ics and thus may limit the lifetime of the ex-periment. They may also cause electrical break-down and damage or generate large numbers ofextraneous signals leading to problems with band-width limitations of the data acquisition systemand with event reconstruction. Backgrounds candegrade resolution and decrease efficiency.
The impact of the beam-generated backgroundon the lifetime and on the operation of the dif-
Day of Year 2000
Tri
ps /
day
0
20
40
60
80
0 100 200 300
Figure 8. Daily rates of beam aborts initiatedby the SVT radiation protection diodes, summedover regular data-taking and PEP-II injection.
ferent detector systems varies significantly. Ta-ble 3 lists the limits on the instantaneous andintegrated background levels in terms of the to-tal dose and instantaneous observables. Theselimits are estimates derived from beam tests andexperience of earlier experiments. For each de-tector system, an annual radiation allowance hasbeen established taking into account the total es-timated lifetime of the components and the ex-pected annual operating conditions. The typicalvalues accumulated for the first year of operationare also presented in the table.
Systematic studies of background rates wereperformed with stable stored beams. Measure-ments of the current-dependence of the back-grounds were carried out for single beams, twobeams not colliding, and colliding beams with thegoal to identify the principal background sources,to develop schemes of reducing these sources, andto extrapolate to operation at higher luminosity[16]. These experimental studies were comple-mented by Monte Carlo simulations of beam-gasscattering and of the propagation of showers inthe detector. The studies show that the rela-tive importance of the single-beam and luminos-ity background contributions varies, as illustratedin Figure 9. Data for the IFR are not shown be-cause this system is largely insensitive to beam-

15
Table 3BABAR background tolerance. Operational limits are expressed either as lifetime limits (radiation-damageand aging-related quantities), or in terms of instantaneous observables (DCH current, DIRC and L1-trigger rates).
Limiting factor Operational First-yearDetector system and impact limit typical
SVT sensors Integrated dose: 2 MRad 0.33 MRadand electronics radiation damage (hor.-plane modules)
0.06 MRad(other modules)
SVT sensors Instantaneous dose: 1 Rad/ms N/Adiode shorts
DCH: electronics Integrated dose: 20 kRad ≤ 100 Radradiation damage
DCH: wire current Accumulated charge: 100 mC/cm 8 mC/cmwire aging
DCH: total current HV system limitations 1000 µA 250 µA(steady-state)
DIRC PMTs Counting rate: 200 kHz 110 kHz (steady-state,TDC deadtime well-shielded sector)
EMC crystals Integrated dose: 10 kRad 0.25 kRadradiation damage (worst case)
L1 trigger Counting rate: 2 kHz 0.7 kHzDAQ dead time (steady-state)
generated backgrounds, except for the outer layerof the forward endcap, due to insufficient shield-ing of the external beam line components.
The experience of the first year of operationand the concern for future operation for each ofthe detectors are summarized as follows.
SVT: The most significant concern for theSVT with regard to machine background is theintegrated radiation dose. The instantaneous andintegrated dose rates in the radiation protectiondiodes are representative, to within about a fac-tor of two, of the radiation doses absorbed bythe SVT modules. The exposure in the horizon-tal planes is an order of magnitude larger thanelsewhere, averaging 15–25 mRad/s during sta-ble beam operation. The highest integrated doseis 450 kRad, roughly 1 kRad/day. This dose isabout 30% below the allowance, giving some con-
fidence that the SVT can sustain operation forseveral more years (see Figure 7).
DCH: For the DCH, the currents on the wiresare the main concern, both because of the lim-ited capacity of the HV power supplies and theeffect of wire aging. The currents drawn are ap-proximately uniformly distributed among the 44HV supplies, one for each quadrant of superlay-ers 2–10, and two per quadrant for superlayer 1.Consequently, the total current limit is close tothe sum of the limits of the individual supplies.During stable operation the total chamber cur-rent is 200–300µA. However, radiation spikes canlead to currents that occasionally exceed the limitof 1000µA, causing HV supplies to trip. Otherbackground effects are measured to be well be-low the estimated lifetime limits and thus are nota serious issue at this time. The average wire

16
1.00
0.75
0.50
0.25
0SVT DIRC
>1MeV >10MeV
EMC
DCH EMC
TRG
Bac
kgro
und
Frac
tion
LER Only HER Only Collisions
1-2001 8583A31
Figure 9. Fractional steady-state backgroundcontributions in BABAR detector systems, mea-sured for single beams and colliding beams understable conditions (I+ = 1.25 A, I− = 0.75 A,L = 2.3× 1033 cm−2 s−1) in July 2000. The con-tributions are derived from the measured doses inthe horizontal plane for the SVT, the total cur-rents in the DCH, the rates in the DIRC photo-multipliers, the occupancy and number of pho-tons above 10 MeV in the EMC, and the L1 trig-ger rates.
occupancy has not exceeded 1–2% during stableoperation, but the extrapolation to future opera-tion at higher luminosity and currents remains amajor concern.
DIRC: The DIRC radiators, made of syn-thetic fused silica, were tested up to doses of100 kRad without showing any measurable effectsand thus radiation damage is not a concern. Thepresent operational limit of the DIRC is set bythe TDC electronics which induce significant deadtime at rates above 250 kHz, well above the sta-ble beam rate of 110 kHz in well shielded areas.Roughly half of the present rate is luminosity-related and can be attributed to radiative Bhabhascattering. The counting rate is due to debrisfrom electromagnetic showers entering the water-filled stand-off box. Efforts are underway to im-prove the shielding of the beam pipe nearby.
EMC: The lifetime of the EMC is set by thereduction in light collection in the CsI crystalsdue to radiation damage. The cumulative doseabsorbed by the EMC is measured by a large setof RadFETs placed in front of the barrel and end-
cap crystals. RadFETs [18] are realtime integrat-ing dosimeters based on solid-state Metal OxideSemiconductor (MOS) technology. The absorbeddose increases approximately linearly with the in-tegrated luminosity. The highest dose to datewas observed in the innermost ring of the end-cap, close to 250 Rad, while the barrel crystalsaccumulated about 80 Rad. The observed reduc-tion in light collection of 10–15% in the worstplace, and 4–7% in the barrel, is consistent withexpectation (see Section 9).
The energy resolution is dependent on the sin-gle crystal readout threshold, currently set at1 MeV. During stable beam conditions the aver-age crystal occupancy for random triggers is 16%,with 10% originating from electronics noise in theabsence of any energy deposition. The spectrumof photons observed in the EMC from the LERand HER is presented in Figure 10. The HERproduces a somewhat harder spectrum. The av-erage occupancy for a threshold of 1 MeV and theaverage number of crystals with a deposited en-ergy of more than 10 MeV are shown in Figure11 as a function of beam currents for both singleand colliding beams. The occupancy increasessignificantly at smaller polar angles, in the for-ward endcap and the backward barrel sections,and in the horizontal plane. The rate increase isapproximately linear with the single beam cur-rents. Background rates recorded with separatedbeams are consistent with those produced by sin-gle beams. For colliding beams, there is an addi-tional flux of photons originating from small angleradiative Bhabha scattering. This effect is largerfor low energy photons and thus it is expectedthat at higher luminosities the low energy back-ground will raise the occupancy and thereby limitthe EMC energy resolution.
L1 Trigger: During stable beam operation,the typical L1 trigger rate is below 1 kHz, morethan a factor of two below the data acquisitionbandwidth limit of about 2.0–2.5kHz. Experi-ence shows that background bursts and other ratespikes can raise the data volume by as much as afactor of two and thus it is necessary to aim forsteady state rates significantly below the statedlimit. For the L1 trigger, the dominant sourcesof DCH triggers are particles generated by inter-

17
10-3
10-2
10-1
1
10
10 2
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
Single Crystal Energy (GeV)
Cry
stal
s / E
vent
/ 2.
5 M
eV
HER only
LER only
Figure 10. The energy spectrum of photonsrecorded in the EMC by random triggers withsingle beams at typical operating currents, LERat 1.1A and HER at 0.7A. The electronic noisehas been subtracted.
actions in vacuum flanges and the B1 magnets(see Figure 86 in Section 11). This effect is mostpronounced in the horizontal plane. At present,the HER background is twice as high as that ofthe LER, and the colliding beams contribute lessthan half of the combined LER and HER singlebeam triggers.
3.7. Summary and OutlookTowards the end of the first year of data-taking,
PEP-II routinely delivered beams close to de-sign luminosity. Due to the very close coop-eration with the PEP-II operations team, themachine-induced backgrounds have not been amajor problem once stable conditions were estab-lished. The background monitoring and protec-tion system has become a reliable and useful toolto safeguard the detector operation.
Currently planned upgrades are expected toraise the luminosity to 1.5×1034 cm−2 s−1 withina few years. The single beam backgrounds willincrease with beam currents and the luminositybackground is projected to exceed, or at bestremain comparable to, the beam-gas contribu-tion. Measures are being prepared to reduce
10
14
18Beams in Collision
Beams Separated
Cry
stal
Occ
upan
cy (
%)
0
2
4
6
8
0 200 400 600
HER Current (mA)
Num
ber
of C
ryst
als
with
E>
10 M
eV Beams in Collision
Beams Separated
(b)
(a)
1-2001 8583A8
Figure 11. Average rates in the EMC for ran-dom triggers as a function of the HER current fora fixed LER current of 1.1A, both for separatedand colliding beams; a) the single crystal occu-pancy for thresholds of 1 MeV and b) the numberof crystals with a deposited energy greater than10 MeV. The solid curves represent a fit to thecolliding beam data, the dashed curves indicatethe sum of rates recorded for single beams.
the sources and the impact of machine-relatedbackground on BABAR, among them upgrades tothe DCH power supply system and to the DIRCTDC electronics, the addition of localized shield-ing against shower debris (especially for the DIRCstand-off box ), new vacuum chambers, adjustablecollimators, and additional pumping capacity incritical regions upbeam of the interaction point.
With the expected increase in LER current

18
0
200
400
600
0 400HER Current (mA)
L1 R
ate
(Hz)
HER + LER in CollisionHER + LER HER
1-2001 8583A7
Figure 12. The L1 trigger rate as a function ofthe HER current for single beam only, for bothbeams, separated and colliding (with a LER cur-rent of 1.1A).
and in luminosity, both the single-beam andthe luminosity-generated L1 trigger rates will in-crease and are projected to exceed 2 kHz (see Fig-ure 12). Therefore, the DCH trigger is being up-graded to improve the rejection of backgroundtracks originating from outside the luminous re-gion. In addition, the data acquisition and dataprocessing capacity will need to be expanded tomeet the demands of higher luminosity.
Overall, the occupancy in all systems, exceptthe IFR, will probably reach levels that are likelyto impact the resolution and reconstruction effi-ciency. For instance, the occupancy in the EMCis expected to more than double. Thus, be-yond the relatively straight forward measures cur-rently planned for BABAR system upgrades, de-tailed studies of the impact of higher occupancywill be necessary for all systems.
4. The Solenoid Magnet and Flux Return
4.1. OverviewThe BABAR magnet system consists of a super-
conducting solenoid [19], a segmented flux returnand a field compensating or bucking coil. Thissystem provides the magnetic field which enablescharged particle momentum measurement, servesas the hadron absorber for hadron/muon separa-tion, and provides the overall structure and sup-
port for the detector components. Figures 1 and 2show key components of the BABAR magnet sys-tem and some of the nearby PEP-II magnets.
The magnet coil cryostat is mounted inside thehexagonal barrel flux return by four brackets oneach end. The flux return end doors are eachsplit vertically and mounted on skids that reston the floor. To permit access to the inner detec-tor, the doors can be raised and moved on rollers.At the interface between the barrel and the enddoors, approximately 60% of the area is occupiedby structural steel and filler plates; the remainingspace is reserved for cables and utilities from theinner detectors. A vertical, triangular chase cutinto the backward end doors contains the cryostatchimney. Table 4 lists the principal parameters ofthe magnet system. The total weight of the fluxreturn is approximately 870 metric tons.
To optimize the detector acceptance for un-equal beam energies, the center of the BABAR de-tector is offset by 370 mm in the electron beamdirection. The principal component of the mag-netic field, Bz, lies along the +z axis; this is alsothe approximate direction of the electron beam.The backward end door is tailored to accommo-date the DIRC bar boxes and to allow accessto the drift chamber electronics. Both ends al-low space and adequate shielding for the PEP-IIquadrupoles.
4.2. Magnetic Field Requirementsand Design
4.2.1. Field RequirementsA solenoid magnetic field of 1.5 T was specified
in order to achieve the desired momentum res-olution for charged particles. To simplify trackfinding and fast and accurate track fitting, themagnitude of the magnetic field within the track-ing volume was required to be constant within afew percent.
The magnet was designed to minimize dis-turbance of operation of the PEP-II beam el-ements. The samarium-cobalt B1 dipole andQ1 quadrupole magnets are located inside thesolenoid as shown in Figure 1. Although thesemagnets can sustain the high longitudinal field of1.5 T, they cannot tolerate a large radial compo-nent. Specifically, the field cannot exceed 0.25 T

19
Table 4Magnet Parameters
Field Parameters
Central Field 1.5 TMax. Radial Field <0.25 T
at Q1 and r = 200 mmLeakage into PEP-II <0.01 TStored Energy 27 MJ
Steel Parameters
Overall Barrel Length 4050 mmOverall Door Thickness 1149 mm
(incl. gaps for RPCs)Overall Height 6545 mmPlates in Barrel 18
9 20 mm4 30 mm3 50 mm2 100 mm
Plates in Each Door 189 20 mm4 30 mm4 50 mm1 100 mm
Main Coil Parameters
Mean Diameter of 3060 mmCurrent Sheet
Current Sheet Length 3513 mmNumber of layers 2Operating Current 4596 AConductor Current 1.2 kA/ mm2
DensityInductance 2.57 H
Bucking Coil Parameters
Inner Diameter 1906 mmOperating Current 200 ANumber of Turns 140
Cryostat Parameters
Inner Diameter 1420 mmRadial Thickness 350 mmTotal Length 3850 mmTotal Material (Al) ∼ 126 mm
at a radius r = 200 mm (assuming a linear depen-dence of Br on r) without degrading their fieldproperties due to partial demagnetization. Theconventional iron quadrupoles Q2, Q4, and Q5are exposed to the solenoid stray fields. To avoidexcessive induced skew octupole components, thestray field leaking into these beam elements is re-quired to be less than 0.01 T averaged over theirapertures.
4.2.2. Field Design ConsiderationsSaturation of the steel near the coil and the gap
between the coil and the steel leads to field non-uniformities. To control these non-uniformities,the current density of the coil is increased at theends relative to the center by reducing the thick-ness of the aluminum stabilizer. While the re-quirements on the radial field component at Q1inside the solenoid can be satisfied easily at theforward end, the shape of the backward plug hadto be specifically designed to simultaneously con-trol field uniformity and unwanted radial compo-nents.
Leakage of magnetic flux is a problem, in par-ticular at the backward end. A bucking coil,mounted at the face of the backward door andsurrounding the DIRC strong support tube, isdesigned to reduce the stray field to an accept-able level for the DIRC photomultipliers and thePEP-II quadrupoles.
4.2.3. Magnetic ModelingExtensive calculations of the magnetic field
were performed to develop the detailed design ofthe flux return, the solenoid coil, and the buckingcoil. To crosscheck the results of these calcula-tions the fields were modeled in detail in two andthree dimensions using commercial software [20].The shape of the hole in each end door was de-signed by optimizing various parameters, such asthe minimum steel thickness in areas of satura-tion. The design of the hole in the forward doorwas particularly delicate because the highly sat-urated steel is very close to the Q2 quadrupole.The multiple finger design of the hole was chosento control the saturation of the steel.
Most of the design work was performed in twodimensions, but some three dimensional calcula-

20
tions were necessary to assure the accuracy ofmodeling the transitions between the end doorsand the barrel, the leakage of field into the PEP-II magnets, and the impact of that leakage onthe multipole purity [21,22]. The computationsof the leakage field were done for central field of1.7 T instead of 1.5 T to provide some insuranceagainst uncertainties in the modeling of complexsteel shapes and the possible variations of themagnetic properties of the steel.
4.3. Steel Flux Return4.3.1. Mechanical
and Magnetic ForcesThe magnet flux return supports the detector
components on the inside, but this load is nota major issue. Far greater demands are placedon the structural design by the magnetic forcesand the mechanical forces from a potential earth-quake.
Magnetic forces are of three kinds. First, thereis a symmetric magnetic force on the end doorswhich was taken into consideration in their de-sign and construction. Second, there is an ax-ial force on the solenoid due to the forward-backward asymmetry of the steel. Because thesteel is highly saturated in places, the magnitudeof the field asymmetry changes when the currentis raised from zero, and there is no position ofthe solenoid at which the force remains zero at allcurrents. Because it is important that this axialforce should not change sign, which could causea quench, the superconducting solenoid was de-liberately offset by 30 mm towards the forwarddoor. This offset was chosen to accommodate aworst case scenario, including uncertainties in thecalculation. Third, during a quench of the super-conducting coil, eddy currents in conducting com-ponents inside the magnetic volume could gen-erate sizable forces. These forces were analyzedfor components such as the endplates of the driftchamber and the electromagnetic calorimeter andwere found not to be a problem.
4.3.2. Earthquake ConsiderationsBecause SLAC is located in an earthquake
zone, considerable attention has been given toprotecting the detector against severe damage
from such an event. The entire detector is sup-ported on four earthquake isolators, one at eachcorner, which limit the component acceleration inthe horizontal plane to 0.4 g. However, these iso-lators offer no protection in the vertical direction.Vertical ground accelerations of 0.6 g are consid-ered credible and actual component accelerationsmay be considerably larger due to resonances. Bytaking into account resonant frequencies and theexpected frequency spectra of earthquakes, themagnet and all detector components have beendesigned to survive these accelerations withoutserious damage. Because the magnet is isolatedfrom the ground moving beneath it, worst caseclearances to external components, e.g.,PEP-IIcomponents, are provided. It is expected thateven during a major earthquake, damage wouldbe modest.
4.3.3. FabricationThe flux return was fabricated [23] from draw-
ings prepared by the BABAR engineering team. Aprimary concern was the magnetic properties ofthe steel. The need for a high saturation fielddictated the choice of a low carbon steel, speci-fied by its chemical content (close to AISI 1006).The manufacturer supplied sample steel for crit-ical magnetic measurements and approval. Theavailability of very large tools at the factory madeit possible to machine the entire face of each endof the assembled barrel, thus assuring a good fitof the end doors. The entire flux return was as-sembled at the factory, measured mechanically,and inspected before disassembly for shipment.
4.4. Magnet CoilsThe design of the superconducting solenoid
is conservative and follows previous experience.The superconducting material is composed ofniobium-titanium (46.5% by weight Nb) fila-ments, each less than 40µm in diameter. Thesefilaments are then wound into 0.8 mm strands,16 of which are then formed into Rutherfordcable measuring 1.4 x 6.4 mm. The final con-ductor [24] consists of Rutherford cable co-extruded with pure aluminum stabilizer measur-ing 4.93 x 20.0 mm for use on the outer, highcurrent density portion of the solenoid, and

21
3513.5
+ z2-20018583A34 All Dimensions in mm
Coil Length
1530.2 Coil
Radius
40.8
A B C D E
Figure 13. A portion of cryostat assembly. Theforward end is shown. Legend: (A) evacuatedspaces filled with IR-reflective insulator; (B) su-perconducting coil (2-layers); (C) aluminum sup-port cylinder; (D) aluminum heat shield; (E) alu-minum cryostat housing.
8.49x 20.0 mm for the central, lower current den-sity portion. The conductor is covered in an insu-lating dry wrap fiberglass cloth which is vacuumimpregnated with epoxy. The conductor has atotal length of 10.3 km.
The solenoid is indirectly cooled to an oper-ating point of 4.5K using a thermo-syphon tech-nique. Liquid helium [25] is circulated in chan-nels welded to the solenoid support cylinder. Liq-uid helium and cold gas circulate between thesolenoid, its shields, the liquefier-refrigerator anda 4000 ` storage dewar via 60 m of coaxial, gas-screened, flexible transfer line. The solenoid coiland its cryostat were fabricated [26] to drawingsprepared by the BABAR engineering team. Beforeshipment [27], the fully assembled solenoid wascooled to operating temperature and tested withcurrents of up to 1000 A, limited by coil forces inthe absence of the iron flux return.
A portion of the cryostat assembly, containingthe solenoid coil, its support cylinder and heatshield, is shown in Figure 13.
To reduce the leakage fields into the PEP-IIcomponents and the DIRC photomultipliers, anadditional external bucking coil is installed [28].This is a conventional water cooled copper coilconsisting of ten layers. Although the nominaloperating current is 200 A, a current of up to575 A is attainable, if needed, to demagnetize theDIRC shield.
To optimally control the stray fields and avoida magnetization of the DIRC magnetic shield, thecurrents in the solenoid and the bucking coil areramped together under computer control. Highprecision transducers are used to measure thecurrents and provide the feedback signals to thepower supplies. The values of the currents arerecorded in the BABAR database.
4.5. Magnetic Field MapThe goal of the magnetic field mapping and
subsequent corrections was to determine the mag-netic field in the tracking volume to a precisionof 0.2 mT.
4.5.1. Mapping ProcedureA field mapping device was built specifically for
the BABAR magnet based on a design concept de-veloped at Fermilab [29]. The magnetic field sen-sors were mounted on a propeller at the end of along cantilevered spindle which reached throughthe hole in the forward end door. The spindle inturn rode on a carriage which moved on precision-aligned rails. The propeller rotated to sample themagnetic volume in φ, and the carriage movedalong its axis to cover z. Measurements were ob-tained from five sets of Br and Bz and two BφHall probes, all of which were mounted on a plateat different radial positions. This plate was at-tached to the propeller and its position could bechanged to cover the desired range in the radialdistance r from the axis. Precision optical align-ment tools were used to determine the position ofthe sensors transverse to the z-axis.
The Br and Bz probes were two-element de-vices with a short-term (few month) precision of0.01%, the Bφ probes were single element deviceswith a precision of 0.1% [30]. In addition to theHall probes, an NMR probe [31] was mounted ata radius of 89 mm on the propeller to provide avery precise field reference near the z-axis as afunction of z for |z| < 1000 mm, where z = 0 atthe magnet center. The NMR measurements setthe absolute scale of the magnetic field.
The magnetic field was mapped at the nomi-nal central operating field of 1.5 T, as well as at1.0 T. Measurements were recorded in 100 mmintervals from −1800 to +1800 mm in z, and in

22
24 azimuthal positions spaced by 15 for each ofthree different radial positions of the Hall probeplate. Thus for each z and φ position, the com-ponents Br and Bz were measured at 13 distinctradii from 130 mm to 1255 mm and Bφ at six radiibetween 505 mm and 1180 mm.
The field map was parameterized in terms of apolynomial of degree up to 40 in r and z plus ad-ditional terms to account for expected perturba-tions [32]. The fit reproduced the measurementsto within an average deviation of 0.2 mT through-out the tracking volume. The fitting procedurealso served as a means of detecting and removingquestionable measurements.
4.5.2. Perturbations to the Field MapDuring the mapping process, the permanent
magnet dipoles (B1) and quadrupoles (Q1) werenot yet installed. Their presence inside thesolenoid results in field perturbations of twokinds. The first is due to the fringe fields of theB1 and Q1 permanent magnets, and of the dipoleand quadrupole trim coils mounted on Q1. TheB1 field strength reaches a maximum of ∼20 mTclose to the surface of the B1 casing and decreasesrapidly with increasing radius. The fields associ-ated with the trim coils were measured and pa-rameterized prior to installation; they are essen-tially dipole in character.
The second field perturbation is due to the per-meability of the permanent magnet material. Sin-tered samarium-cobalt has a relative permeabil-ity of 1.11 to 1.13 in the z direction, and as aresult the solenoid field is modified significantly.Probes between the B1 and Q1 magnets at a ra-dius of about 190 mm measure the effect of thepermeability. The field perturbation is obtainedfrom a two-dimensional, finite element analysiswhich reproduces the r and z dependence of Brand Bz . The induced magnetization increases Bzby about 9 mT at the interaction point; the effectdecreases slowly with increasing radius.
4.5.3. Field QualityTo illustrate the quality of magnetic field, Fig-
ure 14 shows the field components Bz and Br asa function of z for various radial distances r. Inthe tracking volume the field is very uniform, the
-1.0 0.0 1.0
Z (m)
0.05
–0.05
–0.15
Br (
T)
Drift Chamber
Drift Chamber
1-2001 8583A2
1.55
1.45
1.35
Bz
(T)
0.000.27
0.54
0.80 r
0.27 r
0.54
0.80
IP
IP
Figure 14. The magnetic field components Bzand Br as a function of z for various radial dis-tances r (in m). The extent of the DCH andthe location of the interaction point (IP) are in-dicated.
Bφ component does not exceed 1 mT. The vari-ation of the bend field, i.e., the field transverseto the trajectory, along the path of a high mo-mentum track is at most 2.5% from maximum tominimum within the tracking region, as shown inFigure 15.
4.5.4. Field ComputationIn order to reduce the computation of the mag-
netic field for track reconstruction and momen-tum determination, the field values averaged overazimuth are stored in a grid of r–z space pointsspanning the volume interior to the cryostat. Lo-cal values are obtained by interpolation. Withinthe volume of the SVT, a linear interpolation isperformed in a 20 mm grid; elsewhere the interpo-

23
0.0 1.0 2.0
Track Length (m)
1.02
1.00
0.98
Bt(L
)/B
t(0)
18
25
55140
1-2001 8583A1
˚
˚ ˚ ˚
Figure 15. Relative magnitude of magnetic fieldtransverse to a high momentum track as a func-tion of track length from the IP for various polarangles (in degrees). The data are normalized tothe field at the origin.
lation is quadratic in a 50 mm grid. Azimuthal de-pendence is parameterized by means of a Fourierexpansion at each r–z point. The Fourier coef-ficients at the point of interest are obtained byinterpolation on the r–z grid, and the averagefield value is corrected using the resulting Fourierseries.
4.6. SummarySince its successful commissioning, the magnet
system has performed without problems. Therehave been no spontaneous quenches of the su-perconducting solenoid. In the tracking region,the magnetic field meets specifications, both inmagnitude and uniformity. The field compen-sation and magnetic shielding work well for theDIRC photomultiplier array and the externalquadrupoles. Measurements indicate that thebucking coil reduces the field at the face of Q2from ∼50 mT to ∼1 mT [28], in agreement withcalculations.
5. Silicon Vertex Tracker
5.1. Charged Particle TrackingThe principal purpose of the BABAR charged
particle tracking systems, the SVT and the DCH,
is the efficient detection of charged particles andthe measurement of their momentum and angleswith high precision. Among many applications,these precision measurements allow for the re-construction of exclusive B- and D-meson de-cays with high resolution and thus minimal back-ground. The reconstruction of multiple decay ver-tices of weakly decaying B and D mesons is ofprime importance to the physics goals.
Track measurements are also important for theextrapolation to the DIRC, EMC, and IFR. Atlower momenta, the DCH measurements are moreimportant, while at higher momenta the SVTmeasurements dominate. Most critical are theangles at the DIRC, because the uncertainties inthe charged particle track parameters add to theuncertainty in the measurement of the Cherenkovangle. Thus, the track errors from the combinedSVT and DCH measurements should be smallcompared to the average DIRC Cherenkov anglemeasurements, i.e., of order of 1 mrad, particu-larly at the highest momenta.
5.2. SVT Goals and Design RequirementsThe SVT has been designed to provide pre-
cise reconstruction of charged particle trajecto-ries and decay vertices near the interaction region.The design choices were driven primarily by di-rect requirements from physics measurements andconstraints imposed by the PEP-II interaction re-gion and BABAR experiment. In this section themechanical and electronic design of the SVT arediscussed, with some discussion of the point res-olution per layer and dE/dx performance. Thetracking performance and efficiency of the SVTalone and in combination with the DCH are de-scribed in Section 7.
5.2.1. SVT Requirements and ConstraintsThe SVT is critical for the measurement of the
time-dependent CP asymmetry. To avoid signif-icant impact of the resolution on the CP asym-metry measurement the mean vertex resolutionalong the z-axis for a fully reconstructed B de-cay must be better than 80µm [2]. The requiredresolution in the x–y plane arises from the needto reconstruct final states in B decays as well asin τ and charm decays. For example, in decays

24
of the type B0 → D+D−, separating the two Dvertices is important. The distance between thetwo D’s in the x–y plane for this decay is typi-cally ∼ 275µm. Hence, the SVT needs to provideresolution of order ∼100µm in the plane perpen-dicular to the beam line.
Many of the decay products of B mesons havelow pt. The SVT must provide standalone track-ing for particles with transverse momentum lessthan 120 MeV/c, the minimum that can be mea-sured reliably in the DCH alone. This feature isfundamental for the identification of slow pionsfrom D∗-meson decays: a tracking efficiency of70% or more is desirable for tracks with a trans-verse momentum in the range 50–120 MeV/c. Thestandalone tracking capability and the need tolink SVT tracks to the DCH were crucial in choos-ing the number of layers.
Beyond the standalone tracking capability, theSVT provides the best measurement of track an-gles, which is required to achieve design resolu-tion for the Cherenkov angle for high momentumtracks.
Additional constraints are imposed by the stor-age ring components. The SVT is located insidethe ∼4.5 m-long support tube, that extends allthe way through the detector. To maximize theangular coverage, the SVT must extend down to350 mrad (20) in polar angle from the beam linein the forward direction. The region at smallerpolar angles is occupied by the B1 permanentmagnets. In the backward direction, it is suffi-cient to extend the SVT sensitive area down to30.
The SVT must withstand 2 MRad of ionizingradiation. A radiation monitoring system capa-ble of aborting the beams is required. The ex-pected radiation dose is 1 Rad/day in the hori-zontal plane immediately outside the beam pipe(where the highest radiation is concentrated), and0.1 Rad/day on average otherwise.
The SVT is inaccessible during normal detec-tor operations. Hence, reliability and robustnessare essential: all components of the SVT insidethe support tube should have long mean-time-to-failure, because the time needed for any replace-ment is estimated to be 4–5 months. Redundan-cies are built in whenever possible and practical.
Figure 16. Fully assembled SVT. The silicon sen-sors of the outer layer are visible, as is the carbon-fiber space frame (black structure) that surroundsthe silicon.
The SVT is cooled to remove the heat gener-ated by the electronics. In addition, it operatesin the 1.5 T magnetic field.
To achieve the position resolution necessary tocarry out physics analyses, the relative positionof the individual silicon sensors should be sta-ble over long time periods. The assembly allowsfor relative motion of the support structures withrespect to the B1 magnets.
These requirements and constraints have led tothe choice of a SVT made of five layers of double-sided silicon strip sensors. To fulfill the physicsrequirements, the spatial resolution, for perpen-dicular tracks, must be 10–15µm in the three in-ner layers and about 40µm in the two outer lay-ers. The inner three layers perform the impactparameter measurements, while the outer layersare necessary for pattern recognition and low pt
tracking.
5.3. SVT LayoutThe five layers of double-sided silicon strip sen-
sors, which form the SVT detector, are organizedin 6, 6, 6, 16, and 18 modules, respectively; a pho-tograph is shown in Figure 16. The strips on theopposite sides of each sensor are oriented orthog-onally to each other: the φ measuring strips (φstrips) run parallel to the beam and the z mea-suring strips (z strips) are oriented transverselyto the beam axis. The modules of the inner three

25
580 mm
350 mrad520 mrad
ee +-
Beam Pipe
Space Frame
Fwd. support cone
Bkwd. support cone
Front end electronics
Figure 17. Schematic view of SVT: longitudinal section. The roman numerals label the six different typesof sensors.
layers are straight, while the modules of layers 4and 5 are arch-shaped (Figures 17 and 18).
This arch design was chosen to minimize theamount of silicon required to cover the solid angle,while increasing the crossing angle for particlesnear the edges of acceptance. A photograph ofan outer layer arch module is shown in Figure 19.The modules are divided electrically into two half-modules, which are read out at the ends.
Beam Pipe 27.8mm radius
Layer 5a
Layer 5b
Layer 4b
Layer 4a
Layer 3
Layer 2
Layer 1
Figure 18. Schematic view of SVT: tranverse sec-tion.
To satisfy the different geometrical require-ments of the five SVT layers, five different sen-sor shapes are required to assemble the planarsections of the layers. The smallest detectorsare 43 × 42 mm2 (z × φ), and the largest are68 × 53 mm2. Two identical trapezoidal sensorsare added (one each at the forward and back-ward ends) to form the arch modules. The half-modules are given mechanical stiffness by meansof two carbon fiber/kevlar ribs, which are visiblein Figure 19. The φ strips of sensors in the samehalf-module are electrically connected with wirebonds to form a single readout strip. This resultsin a total strip length up to 140 mm (240 mm) inthe inner (outer) layers.
The signals from the z strips are brought to thereadout electronics using fanout circuits consist-ing of conducting traces on a thin (50 µm) insu-lating Upilex [33] substrate. For the innermostthree layers, each z strip is connected to its ownpreamplifier channel, while in layers 4 and 5 thenumber of z strips on a half-module exceeds thenumber of electronics channels available, requir-ing that two z strips on different sensors be elec-trically connected (ganged) to a single electronicschannel. The length of a z strip is about 50 mm(no ganging) or 100 mm (two strips connected).The ganging introduces an ambiguity on the zcoordinate measurement, which must be resolvedby the pattern recognition algorithms. The to-

26
Figure 19. Photograph of an SVT arch modulein an assembly jig.
tal number of readout channels is approximately150,000.
The inner modules are tilted in φ by 5, allow-ing an overlap region between adjacent modules,a feature that provides full azimuthal coverageand is advantageous for alignment. The outermodules cannot be tilted, because of the arch ge-ometry. To avoid gaps and to have a suitableoverlap in the φ coordinate, layers 4 and 5 aredivided into two sub-layers (4a, 4b, 5a, 5b) andplaced at slightly different radii (see Figure 18).The relevant geometrical parameters of each layerare summarized in Table 5.
In order to minimize the material in theacceptance region, the readout electronics aremounted entirely outside the active detector vol-ume. The forward electronics must be mountedin the 10 mm space between the 350 mrad stay-clear space and B1 magnet. This implies thatthe hybrids carrying the front-end chip must be
Table 5Geometric parameters for each layer and readoutplane of the SVT. Floating strips refers to thenumber of strips between readout (R-O) strips.Note: parts of the φ sides of layers 1 and 2 arebonded at 100 µm and 110 µm pitch, respec-tively, with one floating strip. Strip length of z-strips for layers 4 and 5 includes ganging. Theradial range for layers 4 and 5 includes the radialextent of the arched sections.
R-O StripLayer/ Radius pitch Floating lengthview (mm) (µm) strips (mm)
1 z 32 100 1 401 φ 32 50-100 0-1 822 z 40 100 1 482 φ 40 55-110 0-1 883 z 54 100 1 703 φ 54 110 1 1284 z 91-127 210 1 1044 φ 91-127 100 1 2245 z 114-144 210 1 1045 φ 114-144 100 1 265
positioned at an angle of 350 mrad relative to thesensor for the layers 3, 4, and 5 (Figure 17). In thebackward direction, the available space is largerand the inner layer electronics can be placed inthe sensor plane, allowing a simplified assembly.
The module assembly and the mechanics arequite complicated, especially for the arch mod-ules, and are described in detail elsewhere [34].The SVT support structure (Figure 16) is a rigidbody made from two carbon-fiber cones, con-nected by a space frame, also made of carbon-fiberepoxy laminate.
An optical survey of the SVT on its assemblyjig indicated that the global error in placement ofthe sensors with respect to design was ∼200µm,FWHM. Subsequently, the detector was disas-sembled and shipped to SLAC, where it was re-assembled on the IR magnets. The SVT is at-tached to the B1 magnets by a set of gimbal ringsin such a way as to allow for relative motion ofthe two B1 magnets while fixing the position ofthe SVT relative to the forward B1 and the orien-

27
tation relative to the axis of both B1 dipoles. Thesupport tube structure is mounted on the PEP-II accelerator supports, independently of BABAR,allowing for movement between the SVT and therest of BABAR. Precise monitoring of the beaminteraction point is necessary, as is described inSection 5.5.
The total active silicon area is 0.96 m2 and thematerial traversed by particles is ∼ 4% of a radi-ation length (see Section 2). The geometrical ac-ceptance of SVT is 90% of the solid angle in thec.m. system, typically 86% are used in chargedparticle tracking.
5.4. SVT ComponentsA block diagram of SVT components is shown
in Figure 20. The basic components of the de-tector are the silicon sensors, the fanout circuits,the Front End Electronics (FEE) and the datatransmission system. Each of these componentsis discussed below.
Sensors HDIAtomchips
KaptonTail
Matchingcard
HDI link Card
DAQlinkCard
MUXmodulePower Supplies
MUX Power
Fiber Opticsto/from DAQ
CANBus
InsideSupportTube
Frontcables
Figure 20. Schematic block diagram showing thedifferent components of the SVT.
5.4.1. Silicon SensorsThe SVT sensors [35] are 300µm thick double-
sided silicon strip devices. They were designedat INFN Pisa and Trieste (Italy) and fabri-cated commercially [36]. They are built on high-resistivity (6–15 kΩ-cm) n-type substrates withp+ strips and n+ strips on the two opposite sides.The insulation of the n+ strips is provided by in-dividual p-stops, so as to achieve an inter-strip
Table 6Electrical parameters of the SVT, shown for thedifferent layers and views. Cinput refers to thetotal input capacitance, Rseries is the series re-sistance. The amplifier peaking time is 200 ns forlayers 1–3 and 400 ns for layers 4–5.
Noise,Layer/ Cinput Rseries calc. meas.view (pF) (Ω) (elec) (elec)
1 z 6.0 40. 550 8801 φ 17.2 164. 990 12002 z 7.2 48. 600 9702 φ 18.4 158. 1030 12403 z 10.5 70. 700 11803 φ 26.8 230. 1470 14404 z 16.6 104. 870 12104 φ 33.6 224. 1380 13505 z 16.6 104. 870 12005 φ 39.7 265. 1580 1600
resistance greater than 100 MΩ at operating biasvoltage, normally about 10 V above the depletionvoltage.
Typical depletion voltages are in the range 25–35 V. The strips are biased on both sides withpolysilicon resistors (4–20 MΩ) to ensure the re-quired radiation hardness, keeping the voltagedrop across resistors and the parallel noise aslow as possible. Strips are AC-coupled to theelectronics via integrated decoupling capacitors,the capacitance of which depends on the sen-sor shape, but is always greater than 14 pF/cm.The sensors were designed to maximize the ac-tive area, which extends to within 0.7 mm of thephysical edges. Another design goal was to con-trol the inter-strip capacitance: values between0.7 pF/cm and 1.1 pF/cm were obtained for thevarious sensor shapes. To achieve the requiredspatial resolution, while keeping the number ofreadout channels as low as possible, most of themodules have a floating strip (i.e., not read out)between two readout strips.
The leakage currents, because of the excellentperformance of the manufacturing process, wereas low as 50 nA/cm2 on average, measured at10 V above depletion voltage. The silicon sensor

28
parameters have been measured after irradiationwith 60Co sources. Apart from an increase in theinter-strip capacitance of about 12% during thefirst 100 krad, the main effect was an increase ofthe leakage current by 0.7µA/cm2/MRad. How-ever, in a radiation test performed in a 1 GeV/celectron beam, an increase in leakage current ofabout 2µA/cm2/MRad and a significant shift inthe depletion voltage, dependent on the initialdopant concentration, were observed. A shiftof about 8–10 V was seen for irradiation corre-sponding to a dose of approximately 1 MRad.These observations indicate significant bulk dam-age caused by energetic electrons. As indicatedby the change in depletion voltage, the SVT sen-sors could undergo type inversion after about 1–3 MRad. Preliminary tests show that the sen-sors continue to function after type inversion [37].Studies of the behavior of SVT modules as a func-tion of radiation dose continue.
5.4.2. Fanout CircuitsThe fanout circuits, which route the signals
from the strips to the electronics, have been de-signed to minimize the series resistance and theinter-strip capacitance. As described in ref. [38],a trace on the fanout has a series resistance about1.6 Ω/cm, an inter-strip resistance > 20 MΩ, andan inter-strip capacitance < 0.5 pF/cm. The elec-trical parameters of the final assembly of sensorsand fanouts (referred to as Detector Fanout As-semblies or DFAs) are summarized in Table 6.Due to the different strip lengths, there are largedifferences between the inner and the outer lay-ers. Smaller differences are also present betweenthe forward and backward halves of the module,that are of different lengths.
5.4.3. Front End ElectronicsThe electrical parameters of a DFA and the
general BABAR requirements are the basic inputsthat drove the design of the SVT front-end cus-tom IC; the ATOM (A Time-Over-Threshold Ma-chine). In particular, the front-end IC had tosatisfy the following requirements:
• signal to noise ratio greater than 15 for min-imum ionizing particle (MIP) signals for allmodules;
• signals from all strips must be retained,in order to improve the spatial resolutionthrough interpolation, while keeping thenumber of transmitted hits as low as pos-sible. A hit refers to a deposited chargegreater than 0.95 fC, corresponding to 0.25MIP;
• the amplifier must be sensitive to both neg-ative and positive charge;
• the peaking time must be programmable,with a minimum of 100 ns (in layers 1 and2, because of the high occupancy), up to400 ns (outer layers, with high capacitance);
• capability to accept random triggers with alatency up to 11.5µs and a programmablejitter up to ±1µs, without dead time;
• radiation hardness greater than 2.5 MRad;
• small dimensions: 128 channels in a 6.2 mm-wide chip.
These requirements are fully satisfied by theATOM IC [39], which is depicted schematicallyin Figure 21.
CAL DAC
Shaper
ThreshDAC
CompPREAMP
ToT CounterTime Stamp
Event Timeand Number
Circular Buffer
193 Bins
Buffer
Buffer
Chan #
SparsificationR
eadout Buffer
CINJ
CAC SerialData Out
15 MHz
From Silicon
Figure 21. Schematic diagram of the ATOM frontend IC.
The linear analog section consists of a charge-sensitive preamplifier followed by a shaper. Gainsof 200 mV/fC (low) or 300 mV/fC (high) maybe selected. The channel gains on a IC areuniform to 5 mV/fC. Signals are presented to aprogrammable-threshold comparator, designed sothat the output width of the pulse (Time over

29
Table 7ATOM chip ENC parameters at different peakingtimes
Peaking ENC Noisetime (0 pF) slope
100 ns 380 e− 40.9 e−/pF200 ns 280 e− 33.9 e−/pF400 ns 220 e− 25.4e−/pF
Threshold or ToT) is a quasi-logarithmic functionof the collected charge. This output is sampled at30 MHz and stored in a 193 location buffer. Uponreceipt of a Level 1 (L1) trigger, the time andToT is retrieved from this latency buffer, sparci-fied, and stored in a four event buffer. Upon thereceipt of an L1 Accept command from the dataacquisition system, the output data (the 4 bits forthe ToT, 5 bits for the time stamp, and 7 bits forthe strip address) are formatted, serialized, anddelivered to the ROM. The IC also contains a testcharge injection circuit. The typical noise behav-ior of the ATOM, as described by the EquivalentNoise Charge (ENC) of the linear analog sectionis given in Table 7.
The average noise for the various module typesis shown in Table 6. Given that shot noise due tosensor leakage current is negligible, the expectednoise may be calculated from the parameters ofTables 6 and 7. The results of such a calculationare also shown in Table 6. The maximum averagenoise is 1,600 electrons, leading to a signal-to-noise ratio greater than 15.
The power consumption of the IC is about4.5 mW/channel. Radiation hardness was stud-ied up to 2.4 MRad with a 60Co source. At thatdose, the gain decreased 20%, and the noise in-creased less than 15%.
The ATOM ICs are mounted on thick-filmdouble-sided hybrid circuits (known as HighDensity Interconnects or HDIs) based on analuminum-nitride substrate with high thermalconductivity. The electronics are poweredthrough a floating power supply system, in such away as to guarantee a small voltage drop (< 1 V)across the detector decoupling capacitors.
5.4.4. Data TransmissionThe digitized signals are transmitted from the
ATOM ICs through a thin kapton tail or ca-ble to the matching cards, from where they arerouted to more conventional cables. Just outsidethe detector, signals are multiplexed by the MUXmodules, converted into optical signals and trans-mitted to the Readout Modules (ROMs). TheMUX modules also receive digital signals from theDAQ via a fiber optical connection. The SVT isconnected to the BABAR online detector controland monitoring system via the industry standardCAN bus. Details on SVT data transmission sys-tem and DAQ can be found in references [40,41].Power to SVT modules (silicon sensor bias volt-age and ATOM low voltages) is provided by aCAEN A522 power supply system [42].
5.5. Monitoring and CalibrationTo identify immediately any operational prob-
lems, the SVT is integrated in the control andmonitoring system (see Section 12). Majorconcerns for SVT monitoring are temperatureand humidity, mechanical position, and radiationdose.
5.5.1. Temperatureand Humidity Monitors
The total power dissipation of the SVT mod-ules is about 350 W, mainly dissipated in theATOM ICs. External cooling is provided bychilled water at 8C. In addition, humidity is re-duced by a stream of dry air in the support tube.
Since condensation or excessive temperaturecan permanently damage the FEE, temperatureand humidity monitoring are very important tothe safe operation of the SVT. Thermistors arelocated on the HDIs (for the measurements ofFEE temperature), around the SVT, along thecooling systems, and in the electronics (MUX)crates. The absolute temperatures are monitoredto 0.2C and relative changes of 0.1C. Addition-ally, a series of humidity sensors are employedto monitor the performance of the dry air sys-tem. The temperature and humidity monitorsalso serve as an interlock to the HDI power sup-plies.

30
Figure 22. Horizontal motion between the DCHand the support tube measured with the capaci-tive sensors (curve) compared to the mean x coor-dinate of the interaction point (circles) measuredwith e+e− and µ+µ− events over a three-day pe-riod in July 1999. An arbitrary offset and scalehas been applied to the beam position data.
5.5.2. Position MonitorsA system of capacitive sensors was installed to
identify and track changes in the position of theSVT with respect to the PEP-II B1 magnets andthe position of the support tube with respect tothe DCH. An example of the understanding thatcan be achieved by this system is given in Fig-ure 22, where the measured changes in the hor-izontal position of the SVT relative to the DCHare shown for a period of six day in the summer of1999. These position changes can be attributedto local temperature variations. The sensor dataare compared to measurements of the mean po-sition of the interaction point (in the horizontalplane) determined with e+e− and µ+µ− eventsrecorded over this period. While the amplitudeof motion at the time was uncharacteristicallylarge, the strong correlation between these inde-pendent measurements is quite evident. Align-ment with charged particle tracks is now per-formed routinely to correct for relative motionof the tracking systems, as described in Section5.6.2.
5.5.3. Radiation MonitorsRadiation monitoring is extremely important
to ensure the SVT does not exceed its radiationbudget, which could cause permanent damage to
the device. To date, the measured radiation ab-sorbed by the SVT is well within the allowed bud-get.
The monitoring of radiation dose to the SVTis discussed in detail in Section 3.
5.5.4. CalibrationsOnce a day, and each time the SVT configu-
ration has changed, calibrations are performed inabsence of circulating beams. All electronic chan-nels are tested with pulses through test capaci-tors, for different values of the injected charge.Gains, thresholds, and electronic noise are mea-sured, and defective channels are identified. Thecalibration results have proven very stable and re-peatable. The main variation in time is the occa-sional discovery of a new defective channel. Thecalibration procedures have also been very usefulfor monitoring noise sources external to the SVT.
5.5.5. DefectsDue to a series of minor mishaps incurred dur-
ing the installation of the SVT, nine out of 208readout sections (each corresponding to one sideof a half-module) were damaged and are cur-rently not functioning. There is no single fail-ure mode, but several causes: defective connec-tors, mishandling during installation, and not-fully-understood problems on the FEE hybrid.There has been no module failure due to radi-ation damage. It should be noted that due tothe redundancy afforded by the five layers of theSVT, the presence of the defective modules hasminimal impact on physics analyses.
In addition, there are individual channel de-fects, of various types, at a level of about 1%. Cal-ibrations have revealed an increase in the num-ber of defective channels at a rate of less than0.2%/year.
5.6. Data Analysis and PerformanceThis section describes the reconstruction of
space points from signals in adjacent strips onboth sides of the sensors, the SVT internal andglobal alignment, single hit efficiency, and resolu-tion and dE/dx performance of the SVT.

31
5.6.1. Cluster and Hit ReconstructionUnder normal running conditions, the average
occupancy of the SVT in a time window of 1µsis about 3% for the inner layers, with a signif-icant azimuthal variation due to beam-inducedbackgrounds, and less than 1% for the outer lay-ers, where noise hits dominate. Figure 23 showsthe typical occupancy as a function of IC index(equivalent to azimuthal angle, in this case) forlayer 1, φ side. In the inner layers, the occupancyis dominated by machine backgrounds, which aresignificantly higher in the horizontal plane, seenin the plot as the peaks near IC indices 3 and 25.
16
12
8
4
06
4
2
0
0 10 20 30 40
Occ
upan
cy (
%)
IC Index3-2001 8583A39
a)
b)
Figure 23. Typical occupancy in percent asa function of IC index in layer 1, φ side fora) forward half-modules and b) backward half-modules. The IC index increases with azimuthalangle and the higher occupancy in the horizontalplane is visible near chip indices 3 and 25.
The first step of the reconstruction programconsists in discarding out-of-time channels. Atime correction, i.e., the time between the pas-sage of the particle and the time the shaper ex-ceeds threshold, is performed, after which hitswith times more than 200 ns from the event time(determined by the DCH) are discarded. Theloss of real hits from this procedure is negligible.The resulting in-time hits are then passed to the
cluster finding algorithm. First, the charge pulseheight (Q) of a single pulse is calculated fromthe ToT value, and clusters are formed group-ing adjacent strips with consistent times. In asecond pass, clusters separated by just one stripare merged into one cluster. The two originalclusters plus the merged cluster are made avail-able to the pattern recognition algorithm, whichchooses among the three.
The position x of a cluster formed by n stripsis determined, with the “head-to-tail” algorithm:
x =(x1 + xn)
2+p
2
(Qn −Q1)
(Qn +Q1),
where xi and Qi are the position and collectedcharge of i-th strip, respectively, and p is the read-out pitch. This formula results in a cluster posi-tion that is always within p/2 of the geometricalcenter of the cluster. The cluster pulse heightis simply the sum of the strip charges, while thecluster time is the average of the signal times.
5.6.2. AlignmentThe alignment of the SVT is performed in two
steps. The first step consists of determining therelative positions of the 340 silicon sensors. Oncethis is accomplished, the next step is to alignthe SVT as a whole within the global coordi-nate system defined by the DCH. The primaryreason for breaking the alignment procedure intothese two steps is that the local positions are rela-tively stable in time compared to the global posi-tion. Also, the local alignment procedure is con-siderably more complex than the global alignmentprocedure. Thus, the global alignment can be up-dated on a run-by-run basis, while the local align-ment constants are changed as needed, typicallyafter magnet quenches or detector access.
The local alignment procedure is performedwith tracks from e+e− → µ+µ− events and cos-mic rays. Well isolated, high momentum tracksfrom hadronic events are also used to supplementdi-muon and cosmic data. Data samples suffi-cient to perform the local alignment are collectedin one to two days of typical running conditions.
In µ+µ− events, the two tracks are simulta-neously fit using a Kalman filter technique andthe known beam momentum. The use of tracks

32
from cosmic rays reduces any systematic distor-tion that may be introduced due to impreciseknowledge of the beam momenta. No informa-tion from the DCH is used, effectively decouplingthe SVT and DCH alignment.
In addition to the information from tracks,data from an optical survey performed during theassembly of the SVT are included in the align-ment procedure. The typical precision of theseoptical measurements is 4µm. This survey infor-mation is only used to constrain sensors relativeto other sensors in the same module, but not onemodule to another or one layer to another. Fur-thermore, only degrees of freedom in the plane ofthe sensor are constrained as they are expected tobe the most stable, given the assembly procedure.
Using the hit residuals from the aforementionedset of tracks and the optical survey information, aχ2 is formed for each sensor and minimized withrespect to the sensor’s six local parameters. Theconstraints coming from the overlapping regionsof the silicon sensors, the di-muon fit, the cosmicrays, and the optical survey result in internallyconsistent local alignment constants.
Figure 24 shows a comparison between the op-tical alignment made during the SVT assembly inFebruary 1999 and a local alignment using datataken during January 2000. The alignment fromtracking data was made without using cosmics orconstraints from the optical survey. The width ofthe distributions in these plots has four contribu-tions: 1) displacement during the transfer of theSVT from the assembly jig to the IR magnets, 2)time dependent motion of the SVT after mount-ing, 3) statistical errors, and 4) systematic errors.The second set of plots shows the difference in twoalignment sets for data taken in January 2000 ascompared to March 2000. In general, the sta-bility of the inner three layers is excellent, withslightly larger tails in the outer two layers. Theradial coordinate is less tightly constrained in allmeasurements because the radial location of thecharge deposition is not well known, and most ofthe information about the radial locations comesonly from constraints in the overlap region of thesensors.
After the internal alignment, the SVT is con-sidered as a rigid body. The second alignment
Figure 24. Comparison of a local alignment of allthe sensors in the SVT using data from January2000 with the optical survey of the SVT madeduring assembly in February 1999 in the (a) r∆φ,(b) ∆z and (c) ∆r coordinates. Plots (d), (e), and(f) show the difference between two local align-ments using data from January 15-19 and March6-7, 2000 for the r∆φ, ∆z, and ∆r coordinates,respectively. In all the plots, the shaded regionscorrespond to the sensors in the first three layers.In comparing the different alignments and opticalsurvey, a six parameter fit (three global transla-tions and three global rotations) has been appliedbetween the data sets.
step consists in determining the position of theSVT with respect to the DCH. Tracks with suf-ficient numbers of SVT and DCH hits are fittwo times: once using only the DCH informa-tion and again using only the SVT hits. The sixglobal alignment parameters, three translationsand three rotations, are determined by minimiz-ing the difference between track parameters ob-tained with the SVT-only and the DCH-only fits.As reported above, because of the diurnal move-ment of the SVT with respect to the DCH, thisglobal alignment needs to be performed once perrun (∼ every 2–3 hours). The alignment con-stants obtained in a given run are then used toreconstruct the data in the subsequent run. Thisprocedure, known as rolling calibration, ensuresthat track reconstruction is always performedwith up-to-date global alignment constants.
A record of the changes in the relative posi-

33
4-20018583A54
Day of Year 2000
Y P
ositi
on (
mm
)
–0.6
–0.4
–0.2
0 50 100 150 200 250
0(a)
–0.22
–0.18
–0.14
–0.1
–0.06
248 250 252 254 256246Day of Year 2000
Y P
ositi
on (
mm
)
(b)
Figure 25. Global alignment of the SVT relativeto the DCH based on e+e− and µ+µ− events:changes in the relative vertical placement mea-sured a) over the entire ten-month run in the year2000, and b) a ten-day period, illustrating diurnalvariations.
tion of the SVT as determined by rolling calibra-tions is shown in Figure 25. The position is stableto better than ±100µm over several weeks, butchanges abruptly from time to time, for instance,during access to the detector. The calibrationstrack diurnal variations of typically ±50µm thathave been correlated with local changes in tem-perature of about ±2C. Movements within asingle run are small compared to the size of thebeam.
5.6.3. PerformanceThe SVT efficiency can be calculated for each
half-module by comparing the number of asso-ciated hits to the number of tracks crossing theactive area of the module. As can be seen inFigure 26, a combined hardware and software ef-ficiencies of 97% is measured, excluding defectivereadout sections (9 out of 208), but employingno special treatment for other defects, such asbroken AC coupling capacitors or dead channels
on front-end chips. Actually, since most of the
Figure 26. SVT hit reconstruction efficiency, asmeasured on µ+µ− events for a) forward half-modules and b) backward half-modules. Theplots show the probability of associating both aφ and z hit to a track passing through the ac-tive part of the detector. The horizontal axiscorresponds to the different modules, with thevertical lines separating the different layers asnumbered. Missing values correspond to non-functioning half-modules.
defects affect a single channel, they do not con-tribute to the inefficiency, because most tracksdeposit charge in two or more strips due to trackcrossing angles, and charge diffusion.
The spatial resolution of SVT hits is deter-mined by measuring the distance (in the plane ofthe sensor) between the track trajectory and thehit, using high-momentum tracks in two prongevents. The uncertainty due to the track trajec-tory is subtracted from the width of the resid-ual distribution to obtain the hit resolution. Fig-ure 27 shows the SVT hit resolution for z and φside hits as a function of track incident angle, foreach of the five layers. The measured resolutionsare in excellent agreement with expectations fromMonte Carlo simulations.
Initial studies have shown that hit reconstruc-tion efficiency and spatial resolution are effec-

34
angle (degrees)
angle (degrees)
φ R
esol
utiio
n (µ
m)
Layer 1 Layer 2
Layer 3 Layer 4
Layer 5
b)
Layer 1
Layer 3
Layer 5
Layer 2
Layer 4
angle (degrees)
angle (degrees)
z R
esol
utio
n (µ
m)
a)
Figure 27. SVT hit resolution in the a) z and b)φ coordinate in microns, plotted as a function oftrack incident angle in degrees. Each plot showsa different layer of the SVT. The plots in the φcoordinate for layers 1-3 are asymmetric aroundφ = 0 because of the “pinwheel” design of theinner layers. There are fewer points in the φ res-olution plots for the outer layers as they subtendsmaller angles than the inner layers.
tively independent of occupancy for the occu-pancy levels observed so far.
Measurement of the ToT value by the ATOMICs enables one to obtain the pulse height, andhence the ionization dE/dx in the SVT sensor.The values of ToT are converted to pulse heightusing a lookup table computed from the pulseshapes obtained in the bench measurements. Thepulse height is corrected for track length vari-ation. The double-sided sensors provide up toten measurements of dE/dx per track. For everytrack with signals from at least four sensors inthe SVT, a 60% truncated mean dE/dx is cal-culated. The cluster with the smallest dE/dxenergy is also removed to reduce sensitivity toelectronics noise. For MIPs, the resolution on thetruncated mean dE/dx is approximately 14%. A2σ separation between the kaons and pions canbe achieved up to momentum of 500 MeV/c, andbetween kaons and protons beyond 1 GeV/c.
5.7. Summary and OutlookThe SVT has been operating efficiently since
its installation in the BABAR experiment in May1999. The five layer device, based on double-sided silicon sensors, has satisfied the original de-sign goals, in particular the targets specified forefficiency, hit resolution, and low transverse mo-mentum track reconstruction. The radiation doseduring the first 25 fb−1 of integrated luminosity iswithin the planned budget, and no modules havefailed due to radiation damage. The performanceof the SVT modules at high radiation dose is cur-rently being studied. Early results indicate thatthe sensors will continue to function after typeinversion (at 1–3 MRad), but further tests withirradiated sensors and ATOM ICs need to be per-formed. A program of spare module productionhas commenced, with the goal of replacing mod-ules that are expected to fail due to radiationdamage. Beam-generated backgrounds are ex-pected to rise with increasing luminosity. Physicsstudies at five times the current backgrounds lev-els indicate no change in mass or vertex resolutionfor the mode B0 → J/ψK0
S and a ∼ 20% loss ofresolution in the D∗+ − D0 mass difference. Inthis study the detector efficiency for both decaymodes was lower by 15–20%.

35
6. Drift Chamber
6.1. Purpose and Design RequirementsThe principal purpose of the drift chamber
(DCH) is the efficient detection of charged parti-cles and the measurement of their momenta andangles with high precision. These high preci-sion measurements enable the reconstruction ofexclusive B- and D-meson decays with minimalbackground. The DCH complements the mea-surements of the impact parameter and the di-rections of charged tracks provided by the SVTnear the IP. At lower momenta, the DCH mea-surements dominate the errors on the extrapola-tion of charged tracks to the DIRC, EMC, andIFR.
The reconstruction of decay and interactionvertices outside of the SVT volume, for instancethe K0
S decays, relies solely on the DCH. For thispurpose, the chamber should be able to measurenot only the transverse momenta and positions,but also the longitudinal position of tracks, witha resolution of ∼1 mm.
The DCH also needs to supply information forthe charged particle trigger with a maximum timejitter of 0.5µs (Section 11).
For low momentum particles, the DCH is re-quired to provide particle identification by mea-surement of ionization loss (dE/dx). A resolu-tion of about 7% will allow π/K separation upto 700 MeV/c. This capability is complementaryto that of the DIRC in the barrel region, whilein the extreme backward and forward directions,the DCH is the only device providing some dis-crimination of particles of different mass.
Since the average momentum of charged parti-cles produced in B- and D-meson decays is lessthan 1 GeV/c, multiple scattering is a significant,if not the dominant limitation on the track pa-rameter resolution. In order to reduce this contri-bution, material in front of and inside the cham-ber volume has to be minimized.
Finally, the DCH must be operational inthe presence of large beam-generated back-grounds, which were predicted to generate ratesof ∼5 kHz/cell in the innermost layers.
6.2. Mechanical Design and Assembly
6.2.1. OverviewThe DCH is relatively small in diameter, but al-
most 3 m long, with 40 layers of small hexagonalcells providing up to 40 spatial and ionization lossmeasurements for charged particles with trans-verse momentum greater than 180 MeV/c. Longi-tudinal position information is obtained by plac-ing the wires in 24 of the 40 layers at small angleswith respect to the z-axis. By choosing low-massaluminum field wires and a helium-based gas mix-ture, the multiple scattering inside the DCH isheld to a minimum, less than 0.2%X0 of mate-rial. The properties of the chosen gas, a 80:20mixture of helium:isobutane, are presented in Ta-ble 8. This mixture has a radiation length thatis five times larger than commonly used argon-based gases. The smaller Lorentz angle results ina rather uniform time-distance relationship andthereby improved spatial resolution.
Table 8Properties of helium-isobutane gas mixture at at-mospheric pressure and 20C. The drift velocity isgiven for operation without magnetic field, whilethe Lorentz angle is stated for a 1.5 T magneticfield.
Parameter Values
Mixture He : C4H10 80:20Radiation Length 807 mPrimary Ions 21.2/cmDrift Velocity 22µm/ nsLorentz Angle 32
dE/dx Resolution 6.9%
The inner cylindrical wall of the DCH is keptthin to facilitate the matching of the SVT andDCH tracks, to improve the track resolution forhigh momentum tracks, and to minimize thebackground from photon conversions and inter-actions. Material in the outer wall and in theforward direction is also minimized so as not todegrade the performance of the DIRC and theEMC. For this reason, the HV distribution andall of the readout electronics are mounted on thebackward endplate of the chamber. This choice

36
IP236
469
1015
1358 Be
1749
809
485
630 68
27.4
464
Elec–tronics
17.2
e– e+
1-20018583A13
Figure 28. Longitudinal section of the DCH with principal dimensions; the chamber center is offset by370 mm from the interaction point (IP).
also eliminates the need for a massive, heavilyshielded cable plant.
A longitudinal cross section and dimensions ofthe DCH are shown in Figure 28. The DCH isbounded radially by the support tube at its in-ner radius and the DIRC at its outer radius. Thedevice is asymmetrically located with respect tothe IP. The forward length of 1749 mm is chosenso that particles emitted at polar angles of 17.2
traverse at least half of the layers of the chamberbefore exiting through the front endplate. In thebackward direction, the length of 1015 mm meansthat particles with polar angles down to 152.6
traverse at least half of the layers. This choice en-sures sufficient coverage for forward-going tracks,and thus avoids significant degradation of the in-variant mass resolution, while at the same timemaintaining a good safety margin on the electri-cal stability of the chamber. The DCH extendsbeyond the endplate by 485 mm at the backwardend to accommodate the readout electronics, ca-bles, and an rf shield. It extends beyond the for-ward endplate by 68 mm to provide space for wirefeed-throughs and an rf shield.
6.2.2. Structural ComponentsDetails of the DCH mechanical design are pre-
sented in Figure 29. The endplates, which carryan axial load of 31,800kN, are made from alu-minum plates of 24 mm thickness. At the forward
end, this thickness is reduced to 12 mm beyonda radius of 46.9 cm to minimize the material infront of the calorimeter endcap. For this thick-ness, the estimated safety margin on the plasticyield point for endplate material (6061T651 alu-minum) is not more than a factor of two. Themaximum total deflection of the endplates underloading is small, about 2 mm or 28% of the 7 mmwire elongation under tension. During installa-tion of the wires, this small deflection was takeninto account by over-tensioning the wires.
The inner and outer cylinder cylindrical wallsare load bearing to reduce the maximum stressand deflections of the endplates. The steppedforward endplate created a complication duringthe assembly, because the thinner forward end-plate would deflect more than the thicker back-ward endplate. The outside rim of the forwardendplate had to be pre-loaded, i.e., displaced by2.17 mm in the forward direction, to maintain theinside and outside rims of the rear endplate at thesame longitudinal position after the load of thewires was transfered from the stringing fixture tothe outer cylinder.
Prior to installation on the inner cylinder, thetwo endplates were inspected on a coordinate-measuring machine. All sense wire holes, as wellas 5% of the field and clearing field wire holes,were measured to determine their absolute loca-tions. The achieved accuracy of the hole place-

37
1
3
12.5
3.5R236
5
4
24
R809
Backward Endplate
RF Shield
Forward Endplate
9
12
24
R469
1 3.5
Outer Wall
Inner Wall
R809R808.5
1-2001 8583A30
Beryllium
Honeycomb Carbon Fiber
z = –1015 z = +1749
Figure 29. Details of the structural elements of the DCH. All components are made of aluminum, exceptfor the 1 mm-thick inner beryllium wall and the 9 mm-thick outer composite wall.
ment was 38µm for both sense and field wires,better than the specification by more than a fac-tor of two. In addition, the diameters of the samesample of endplate holes were checked with pre-cision gauge pins. All holes passed the diame-ter specification (4.500±0.025
0.000 for sense wires and2.500±0.025
0.00 for the field and guard wires).The inner cylindrical wall of the DCH, which
carries 40% of the wire load, was made fromfive sections, a central 1 mm-thick beryllium tubewith two aluminum extensions which were inturn electron-beam welded to two aluminum endflanges to form a 3 m-long cylindrical part. Thecentral section was made from three 120 seg-ments of rolled and brazed beryllium. The endflanges have precision surfaces onto which theendplates were mounted. These surfaces set theangles of the two endplates with respect to theaxis and significantly constrain the concentricityof the tube. The inner cylinder also provides asubstantial rf shield down to the PEP-II bunch-gap frequency of 136 kHz.
The outer wall bears 60% of axial wire loadbetween the endplates. To simplify its installa-tion, this external wall was constructed from two
half-cylinders with longitudinal and circumferen-tial joints. The gas and electrical seals for thesejoints were made up in situ. The main structuralelement consists of two 1.6 mm-thick (0.006X0)carbon fiber skins laminated to a 6 mm-thick hon-eycomb core. The outer shell is capable of with-standing a differential pressure of 30 mbar andtemperature variations as large as ±20C, con-ditions that could be encountered during ship-ping or installation. Aluminum foil, 25µm-thickon the inside surface and 100µm on the outside,are in good electrical contact with the endplates,thereby completing the rf shield for the chamber.
The total thickness of the DCH at normal in-cidence is 1.08%X0, of which the wires and gasmixture contribute 0.2%X0, and the inner wall0.28%X0.
6.2.3. Wire Feed-ThroughsA total of five different types of feed-throughs
were required for the chamber to accommodatethe sense, field, and clearing field wires, as well astwo different endplate thicknesses. The five typesare illustrated in Figure 30. They incorporatecrimp pins [43] of a simple design which fastenand precisely locate the wires. The choice of pin

38
material (gold-plated copper for the signal wiresand gold-plated aluminum for the field wires) andwall thickness in the crimp region was optimizedto provide an allowable range of almost 150µm incrimp size, as a primary means for avoiding wirebreakage.
Crimp pins were either press-fit into an in-sulator made from a single piece of injection-molded thermoplastic reinforced with 30% silicaglass fiber [44], or swaged into a copper jacket forthe field wires. The plastic insulates the sense,guard, and clearing field wires from the electri-cally grounded endplates, while the metal jacketsprovide good ground contact for field wires (<0.1Ω) on the backward endplate. The outer diam-eter of the field and clearing field feed-throughswas maintained at 2.000+0.000
−0.025mm while the sense
wire feed-through had a larger (4.500+0.000−0.025 mm)
outer diameter and a longer body (41.7 mm).This choice provided both thicker insulating wallsand a longer projection into the gas volume tobetter shield the HV from the grounded endplate.
6.2.4. Assembly and StringingAssembly of the chamber components and in-
stallation of the wires was carried out in a largeclean room (Class 10,000) at TRIUMF in Vancou-ver. The wires were strung horizontally withoutthe outer cylindrical shell in place. The endplateswere mounted and aligned onto the inner cylinderwhich in turn was supported by a central shaft ina mobile fixture. The endplates were mounted onthe inner cylinder at the inside rim and attachedto support rings at the outside. These rings wereconnected by radial spiders to the central shaftof the stringing frame.
Two teams of two operators each worked inparallel as the wires were strung from the in-ner radius outward. The two teams were eachassisted by an automated wire transporter [45].A wire was attached to a needle which was in-serted through one of the endplate hole, capturedmagnetically by one of the transporters, and thentransported and inserted though the appropriatehole in the other endplate. The wire was thenthreaded through the feed-throughs, which wereglued into the endplates, and the wire was ten-sioned and crimped. The automated wire trans-
24 mm
12 mm 1-20018583A11
FieldCopper
Al
Celenex
Celenex
Sense
Guard
Field/
Sense
Guard
Al
Cu
Al
Cu
Figure 30. Design of the five DCH wire feed-throughs for the 24 mm-thick endplates and the12 mm-thick endplate. The copper jacketed feed-through is for grounded field wires, the other fourare for sense wires (4.5 mm diameter), and guardand clearing field wires (2.5 mm diameter), allmade from a Celenex insulator surrounding thecrimp pins.
porters were largely built from industrial compo-nents, employing commercial software and hard-ware. The semi-automatic stringing procedureensured the correct hole selection, accelerated thestringing rate and greatly improved the cleanli-ness and quality of the stringing process. The in-stallation of a total of 28,768 wires was completedin less than 15 weeks.
6.3. Drift Cells6.3.1. Layer Arrangement
The DCH consists of a total of 7,104 small driftcells, arranged in 40 cylindrical layers. The layersare grouped by four into ten superlayers, with thesame wire orientation and equal numbers of cellsin each layer of a superlayer. Sequential layersare staggered by half a cell. This arrangementenables local segment finding and left-right ambi-guity resolution within a superlayer, even if oneout of four signals is missing. The stereo angles of

39
the superlayers alternate between axial (A) andstereo (U,V) pairs, in the order AUVAUVAUVA,as shown in Figure 31. The stereo angles vary be-tween ±45 mrad and ±76 mrad; they have beenchosen such that the drilling patterns are identi-cal for the two endplates. The hole pattern has a16-fold azimuthal symmetry which is well suitedto the modularity of the electronic readout andtrigger system. Table 9 summarizes parametersfor all superlayers.
Table 9The DCH superlayer (SL) structure, specifyingthe number of cells per layer, radius of the inner-most sense wire layer, the cell widths, and wirestereo angles, which vary over the four layers ina superlayer as indicated. The radii and widthsare specified at the mid-length of the chamber.
# of Radius Width AngleSL Cells (mm) (mm) (mrad)
1 96 260.4 17.0-19.4 02 112 312.4 17.5-19.5 45-503 128 363.4 17.8-19.6 -(52-57)4 144 422.7 18.4-20.0 05 176 476.6 16.9-18.2 56-606 192 526.1 17.2-18.3 -(63-57)7 208 585.4 17.7-18.8 08 224 636.7 17.8-18.8 65-699 240 688.0 18.0-18.9 -(72-76)10 256 747.2 18.3-19.2 0
6.3.2. Cell Design and WiresThe drift cells are hexagonal in shape, 11.9 mm
by approximately 19.0 mm along the radial andazimuthal directions, respectively. The hexago-nal cell configuration is desirable because approx-imate circular symmetry can be achieved over alarge portion of the cell. The choice of aspectratio has the benefit of decreasing the numberof wires and electronic channels, while allowing a40-layer chamber in a confined radial space. Eachcell consists of one sense wire surrounded by sixfield wires, as shown in Figure 31. The proper-ties of the different types of gold-coated wires thatmake up the drift cells are given in Table 10. The
0Stereo
1 Layer
0Stereo
1 Layer
0 2 0 2 0 2
0 3
0 4 0 4
45 5 45 5
47 6 47 6 47 6
48 7 48 7
50 8
-52 9
-5410
-5511
-5712
013 013
014 014
015
016
4 cm
Sense Field Guard Clearing
1-2001 8583A14
Figure 31. Schematic layout of drift cells forthe four innermost superlayers. Lines have beenadded between field wires to aid in visualizationof the cell boundaries. The numbers on the rightside give the stereo angles (mrad) of sense wires ineach layer. The 1 mm-thick beryllium inner wallis shown inside of the first layer.
sense wires are made of tungsten-rhenium [46],20µm in diameter and tensioned with a weightof 30 g. The deflection due to gravity is 200µmat mid-length. Tungsten-rhenium has a substan-tially higher linear resistivity (290Ω/m), com-pared to pure tungsten (160Ω/m), but it is con-siderably stronger and has better surface quality.While the field wires are at ground potential, apositive high voltage is applied to the sense wires.

40
An avalanche gain of approximately 5 × 104 isobtained at a typical operating voltage of 1960 Vand a 80:20 helium:isobutane gas mixture.
Table 10DCH wire specifications (all wires are goldplated).
Diameter Voltage TensionType Material (µm) (V) (g)
Sense W-Re 20 1960 30Field Al 120 0 155
Guard Al 80 340 74Clearing Al 120 825 155
The relatively low tension on the approxi-mately 2.75 m-long sense wires was chosen so thatthe aluminum field wires have matching gravita-tional sag and are tensioned well below the elas-tic limit. A simulation of the electrostatic forcesshows that the cell configuration has no instabil-ity problems. At the nominal operating voltageof 1960V, the wires deflect by less then 60µm.
The field wires [47] are tensioned with 155 gto match the gravitational sag of the sense wiresto within 20µm. This tension is less than one-half the tensile yield strength of the aluminumwire. For cells at the inner or outer boundary of asuperlayer, two guard wires are added to improvethe electrostatic performance of the cell and tomatch the gain of the boundary cells to those ofthe cells in the inner layers. At the innermostboundary of layer 1 and the outermost boundaryof layer 40, two clearing wires have been addedper cell to collect charges created through photonconversions in the material of the walls.
6.3.3. Drift IsochronesThe calculated isochrones and drift paths for
ions in adjacent cells of layer 3 and 4 of an ax-ial superlayer are presented in Figure 32. Theisochrones are circular near the sense wires, butdeviate greatly from circles near the field wires.Ions originating in the gap between superlayersare collected by cells in the edge layers after a de-lay of several µs. These lagging ions do not affectthe drift times measurements, but they contribute
Sense
FieldGuard 1-2001
8583A16
Figure 32. Drift cell isochrones, i.e., contours ofequal drift times of ions in cells of layers 3 and 4 ofan axial superlayer. The isochrones are spaced by100 ns. They are circular near the sense wires, butbecome irregular near the field wires, and extendinto the gap between superlayers.
to the dE/dx measurement.
6.3.4. Cross TalkA signal on one sense wire produces oppositely-
charged signals on neighboring wires due to ca-pacitive coupling. The cross talk is largest be-tween adjacent cells of adjacent layers, rangingfrom −0.5% at a superlayer boundary to −2.7%for internal layers within superlayers. For adja-cent cells in the same layer, the cross talk rangesfrom −0.8 to −1.8%, while for cells separated bytwo layers it is less than 0.5%.
6.4. Electronics6.4.1. Design Requirements and Overview
The DCH electronic system is designed to pro-vide a measurement of the drift time and the inte-grated charge, as well as a single bit to the triggersystem [48] for every wire with a signal. In the80:20 helium:isobutane gas mixture, there are onaverage some 22 primary and 44 total ionizationclusters produced per cm. The position of theprimary ionization clusters is derived from tim-ing of the leading edge of the amplified signal.The design goal was to achieve a position res-

41
Data I/0Module
G-Linkto ROM
G-Linkto Trigger
Trigger I/0Module
FEA 1 FEA 2 FEA 3
SL 1
ROIB ROIB ROIB
SL 2 SL 3 SL 4 SL 5 SL 6 SL 7 SL 8 SL 9 SL10
ADBADB
ADB
Signals
1-20018583A12
FEA = Front End AssemblyADB = Amplifier/Digitizer BoardROIB = Readout Interface BoardSL = Superlayer
Figure 33. Block diagram for a 1/16th wedge of the DCH readout system, showing logical organizationof the three front-end assemblies and their connections to the trigger and data I/O modules
olution of 140µm, averaged over the cells. Toreduce the time jitter in the signal arrival andat the same time maintain a good signal-to-noiseratio, the signal threshold was set at about 2.5primary electrons. For the dE/dx measurement,a resolution of 7% was projected for a 40-layerchamber.
The small cell size and the difficult accessthrough the DIRC strong support tube require avery high density of electronics components. As aconsequence, a compact and highly modular de-sign was chosen. The readout is installed in wellshielded assemblies that are plugged into the end-plate and are easily removable for maintenance.
A schematic overview of the DCH electronicsis presented in Figure 33 [49]. The 16-fold az-imuthal symmetry of the cell pattern is reflectedin the readout segmentation. The DCH amplifierand digitizer electronics are installed in electron-ics front-end assemblies (FEAs) that are mounteddirectly onto the rear endplate. There are threeFEAs in each of the 16 sectors. These sectorsare separated by brass cooling bars that extendfrom the inner to the outer chamber walls. Thesebars provide mechanical support and water cool-
ing channel for the FEAs. The assemblies connectto the sense wires through service boards, whichroute the signals and HV distribution. A readoutinterface board (ROIB) in each FEA organizesthe readout of the digitized data. Data I/O andtrigger I/O modules multiplex serial data fromthe FEAs to high-speed optical fibers for transferto the readout modules that are located in theelectronics building.
6.4.2. Service BoardsService boards provide the electrostatic poten-
tials for signal, guard, and clearing wires, andpass signals and ground to the front-end read-out electronics. A side view of a service board isshown in Figure 34. The HV board contains theHV buses and filtering, current limiting resistors,and blocking capacitors. Jumpers connect adja-cent boards. The stored energy is minimized byusing a 220 pF HV blocking capacitors.
The signals are connected via series resistors tothe upper signal board which contains the pro-tection diodes and standard output connectors.Mounting posts, anchored into the rear endplate,also serve as ground connections.

42
HV Board
Ground Post
Signal Board
Hypertronics Connectors
Feed-throughs
Al Endplate
24 mm
1-2001 8583A22
Sense WiresField Wires
Guard Wires
Figure 34. Side view of service boards show-ing two-tiered structure for DCH HV distributionand signal collection.
6.4.3. Front-End AssembliesThe FEAs plug into connectors on the back
side of the service boards. These custom wedge-shaped crates are aluminum boxes that contain aROIB and two, three, or four amplifier/digitizerboards (ADB) for superlayers 1–4, 5–7, and 8–10,respectively, as shown in Figure 35. The cratesare mounted with good thermal contact to thewater cooled radial support bars. The total heatload generated by the FEAs is 1.3 kW.
The ADBs are built from basic building blocksconsisting of two 4-channel amplifier ICs [50] feed-ing a single 8-channel digitizer custom ASIC [51].The number of channels serviced by an ADB is60, 48, or 45, for the inner, middle, and outerFEA modules, respectively.
The custom amplifier IC receives the input sig-nal from the sense wire and produces a discrim-inator output signal for the drift time measure-ment and a shaped analog signal for the dE/dxmeasurement. Both outputs are fully differential.The discriminator has gain and bandwidth con-trol, and a voltage controlled threshold. The ana-log circuit has integrator and gain control.
The custom digitizer IC incorporates a 4-bitTDC for time measurement and a 6-bit 15 MHzFADC to measure the total deposited charge.
SL 8-10
SL 5-7
SL 1-4
Cooling Channel
Amplifier Digitizer Board
10 cm
1-2001 8583A17
Figure 35. Layout of 1/16th of the DCH rear end-plate, showing three FEA boxes between watercooled channels.
The TDC is a phase-locked digital delay linearvernier on the sample clock of 15 MHz, whichachieves a 1 ns precision for leading edge tim-ing. The FADC design is based on a resistor-divider comparator ladder that operates in bi-linear mode to cover the full dynamic range. Thedigitized output signals are stored in a trigger la-tency buffer for 12.9µs, after which a L1 Acceptinitiates the transfer of a 2.2µs block of data tothe readout buffer. In addition, trigger informa-tion is supplied for every channel, based eitheron the presence of a TDC hit during the sam-ple period or FADC differential pulse height in-formation, should a higher discriminator level bedesirable.
The ROIB interprets FCTS commands to con-trol the flow of data and trigger information.Data are moved to FIFOs on the ROIBs, and thento data and trigger I/O modules via 59.5 MHz se-rial links. A total of four such links are requiredper 1/16th wedge, one for each of the outer twoFEAs and two for the innermost of the FEA. Each

43
data I/O module services all FEAs one quad-rant and transmits the data to a single ROMvia one optical fiber link. The trigger stream isfirst multiplexed onto a total of 30 serial lines perwedge for transmission to the trigger I/O mod-ule. Trigger data from two wedges of FEAs arethen transmitted to the trigger system via threeoptical links. Thus, a total of 28 optical fibers,four for the data and 24 for the charged particletrigger, are required to transfer the DCH data tothe readout.
6.4.4. Data AcquisitionThe data stream is received and controlled by
four BABAR standard readout modules. Driftchamber-specific feature extraction algorithmsconvert the raw FADC and TDC information intodrift times, total charge, and a status word. Thetime and charge are corrected channel-by-channelfor time offsets, pedestals, and gain constants.Based on measurements of the noise a thresh-old is typically 2–3 electrons is applied to dis-criminate signals. These algorithms take about1µs per channel, and reduce the data volume byroughly a factor of four.
6.4.5. High Voltage SystemThe HV bias lines on the chamber are daisy-
chained together so that each superlayer requiresonly four power supplies, except for superlayer1 which has eight. The voltages are supplied tothe sense, guard, and clearing wires by a CAENSY527 HV mainframe [42], equipped with 24-channel plug-in modules. The sense wires are sup-plied by 44 HV channels providing up to 40µA ofcurrent each that can be monitored with a reso-lution of 0.1%.
6.5. Gas SystemThe gas system has been designed to provide a
stable 80:20 helium:isobutane mixture at a con-stant over pressure of 4 mbar [52]. The chambervolume is about 5.2 m3. Gas mixing and recir-culation is controlled by precise mass flow con-trollers; the total flow is tuned to 15 `/min, ofwhich 2.5 `/min are fresh gas. During normaloperation, the complete DCH gas volume is re-circulated in six hours, and one full volume offresh gas is added every 36 hours. The pressure
in the DCH is measured by two independent pres-sure gauges, one of which is connected to a regula-tor controlling the speed of the compressor. Therelative pressure in the chamber is controlled tobetter than ±0.05 mbar.
Oxygen is removed from the gas mixture us-ing a palladium catalytic filter. The water con-tent is maintained at 3500± 200 ppm by passingan adjustable fraction of the gas through a waterbubbler. This relatively high level of water vaporis maintained to prevent electrical discharge. Inaddition to various sensors to monitor pressure,temperature, and flow at several points of the sys-tem, a small wire chamber with an 55Fe sourcecontinuously monitors gain of the gas mixture.
6.6. Calibrations and Monitoring6.7. Electronics Calibration
The front-end electronics (FEEs) are calibrateddaily to determine the channel-by-channel correc-tion constants and thresholds. Calibration pulsesare produced internally and input to the pream-plifier at a rate of about 160 Hz. The calibrationsignals are processed in the ROM to minimizethe data transfer and fully exploit the availableprocessing power. The results are stored for sub-sequent feature extraction. The entire online cal-ibration procedure takes less than two minutes.
6.7.1. Environmental MonitoringThe operating conditions of the DCH are mon-
itored in realtime by a variety of sensors and readout by the detector-wide CAN bus system. Thesesensors monitor the flow rate, pressure, and gasmixture; the voltages and currents applied to thewires in the chamber; the voltages and currentsdistributed to the electronics from power sup-plies and regulators; instantaneous and cumula-tive radiation doses; temperature and humidityaround the chamber electronics and in the equip-ment racks. Additional sensors monitor the at-mosphere in and around the detector for excessisobutane, which could pose a flammability or ex-plosive hazard in the event of a leak.
Many of the sensors are connected to hardwareinterlocks, which ensure that the chamber is au-tomatically put into a safe state in response to anunsafe condition. All of these systems have per-

44
formed reliably. In addition, automated softwaremonitors raw data quality, chamber occupanciesand efficiencies to sense variations in electronicsperformance that might indicate more subtle op-erational problems.
6.7.2. Operational ExperienceThe design of the DCH specifies a voltage of
1960 V on the sense wires to achieve the desiredgain and resolution. The chamber voltage waslowered for part of the run to 1900 V out of con-cern for a small region of the chamber that wasdamaged during the commissioning phase by in-advertently applying 2 kV to the guard wires.Wires in this region (10.4% of superlayer 5, and4.2% of superlayer 6) were disconnected whencontinuous discharge was observed over extendedperiods of time.
6.8. PerformanceThe DCH was first operated with full mag-
netic field immediately after the installation intoBABAR. Cosmic ray data were recorded and ex-tensive studies of the basic cell performance wereperformed to develop calibration algorithms forthe time-to-distance and dE/dx measurements.These algorithms were then implemented as de-scribed below for colliding beam data. Calibra-tions are monitored continuously to provide feed-back to the operation; some time varying parame-ters are updated continuously as part of OPR. Forcharge particle tracking the DCH and SVT infor-mation is combined; the performance of the com-bined tracking system is described in Section 7.
6.8.1. Time-to-Distance RelationThe precise relation between the measured drift
time and drift distance is determined from sam-ples of e+e− and µ+µ− events. For each signal,the drift distance is estimated by computing thedistance of closest approach between the trackand the wire. To avoid bias, the fit does not usethe hit on the wire under consideration. The es-timated drift distances and measured drift timesare averaged over all wires in a layer, but the dataare accumulated separately for tracks passing onthe left of a sense wire and on the right. The time-distance relation is fit to a sixth-order Chebychevpolynomial. An example of such a fit is shown in
0
4
8
0 200 400 600
Drif
t Dis
tanc
e (
mm
)
Drift Time (ns)
LeftRight
1-2001 8583A18
Figure 36. The drift time versus distance rela-tion for left and right half of a cell. These func-tions are obtained from the data averaged over allcells in a single layer of the DCH.
Figure 36.An additional correction is made for tracks
with varying entrance angle into the drift cell.This angle is defined relative to the radial vectorfrom the IP to the sense wire. The correction isapplied as a scale factor to the drift distance andwas determined layer-by-layer from a Garfield [53]simulation. The entrance angle correction is im-plemented as a tenth-order Chebychev polyno-mial of the drift distance, with coefficients whichare functions of the entrance angle.
Figure 37 shows the position resolution as afunction of the drift distance, separately for theleft and the right side of the sense wire. Theresolution is taken from Gaussian fits to the dis-tributions of residuals obtained from unbiasedtrack fits. The results are based on multi-hadronevents, for data averaged over all cells in layer 18.
6.8.2. Charge MeasurementThe specific energy loss, dE/dx, for charged
particles traversing the DCH is derived from mea-surement of total charge deposited in each driftcell. The charge collected per signal cell is mea-sured as part of the feature extraction algorithmin the ROM. Individual measurements are cor-rected for gain variations, pedestal-subtracted

45
0
0.1
0.2
0.3
0.4
–10 –5 0 5 101-2001 8583A19 Distance from Wire (mm)
Res
olut
ion
(m
m)
Figure 37. DCH position resolution as a functionof the drift distance in layer 18, for tracks on theleft and right side of the sense wire. The data areaveraged over all cells in the layer.
Figure 38. Measurement of dE/dx in the DCHas a function of track momenta. The data includelarge samples of beam background triggers, as ev-ident from the high rate of protons. The curvesshow the Bethe-Bloch predictions derived fromselected control samples of particles of differentmasses.
and integrated over a period of approximately1.8µs.
The specific energy loss per track is computedas a truncated mean from the lowest 80% of theindividual dE/dx measurements. Various correc-tions are applied to remove sources of bias thatdegrade the accuracy of the primary ionizationmeasurement. These corrections include the fol-lowing:
• changes in gas pressure and temperature,leading to ±9% variation in dE/dx, cor-rected by a single overall multiplicative con-stant;
• differences in cell geometry and charge col-lection (±8% variation), corrected by a setof multiplicative constants for each wire;
• signal saturation due to space charge build-up (±11% variation), corrected by a second-order polynomial in the dip angle, λ, of the
form 1/√
sin2 λ + const;
• non-linearities in the most probable energyloss at large dip angles (±2.5% variation),corrected with a fourth-order Chebychevpolynomial as a function of λ; and
• variation of cell charge collection as a func-tion entrance angle (±2.5% variation), cor-rected using a sixth-order Chebychev poly-nomial in the entrance angle.
The overall gas gain is updated continuouslybased on calibrations derived as part of promptreconstruction of the colliding beam data; theremaining corrections are determined once for agiven HV voltage setting and gas mixture.
Corrections applied at the single-cell level canbe large compared to the single-cell dE/dx res-olution, but have only a modest impact on theaverage resolution of the ensemble of hits. Globalcorrections applied to all hits on a track are there-fore the most important for the resolution.
Figure 38 shows the distribution of the cor-rected dE/dxmeasurements as a function of trackmomenta. The superimposed Bethe-Bloch pre-dictions for particles of different masses have beendetermined from selected control samples.

46
0
100
200
300
-0.4 0 0.4(dE/dxmeas.– dE/dxexp.) / dE/dxexp.
Tra
cks
1-2001 8583A21
Figure 39. Difference between the measured andexpected energy loss dE/dx for e± from Bhabhascattering, measured in the DCH at an operatingvoltage of 1900 V. The curve represents a Gaus-sian fit to the data with a resolution of 7.5%.
The measured dE/dx resolution for Bhabhaevents is shown in Figure 39. The rms resolu-tion achieved to date is typically 7.5%, limitedby the number of samples and Landau fluctua-tions. This value is close to the expected resolu-tion of 7%. Further refinements and additionalcorrections are being considered to improve per-formance.
6.9. ConclusionsThe DCH has been performing close to design
expectations from the start of operations. Withthe exception of a small number of wires that weredamaged by an unfortunate HV incident duringthe commissioning phase, all cells are fully oper-ational. The DCH performance has proven verystable over time. The design goal for the intrin-sic position and dE/dx resolution have been met.Backgrounds are acceptable at present beam cur-rents, but there is concern for rising occupanciesand data acquisition capacity at the high end ofthe planned luminosity upgrades.
7. Performance of the Charged ParticleTracking Systems
Charged particle tracking has been studiedwith large samples of cosmic ray muons, e+e−,
µ+µ−, and τ+τ− events, as well as multi-hadrons.At this time, these studies are far from completeand the results represent the current status. Inparticular, many issues related to the intrinsicalignment of the SVT and the DCH, the varia-tion with time of the relative alignment of theSVT and the DCH, and movement of the beamposition relative to BABAR remain under study.
7.1. Track ReconstructionThe reconstruction of charged particle tracks
relies on data from both tracking systems, theSVT and the DCH. Charged tracks are definedby five parameters (d0, φ0, ω, z0, tanλ) and theirassociated error matrix. These parameters aremeasured at the point of closest approach to thez-axis; d0 and z0 are the distances of this pointfrom the origin of the coordinate system in thex–y plane and along the z-axis, respectively. Theangle φ0 is the azimuth of the track, λ the dip an-gle relative to the transverse plane, and ω = 1/ptis its curvature. d0 and ω are signed variables;their sign depends on the charge of the track. Thetrack finding and the fitting procedures make useof Kalman filter algorithm [54] that takes into ac-count the detailed distribution of material in thedetector and the full map of the magnetic field.
The offline charged particle track reconstruc-tion builds on information available from the L3trigger and tracking algorithm. It begins with animprovement of the event start time t0, obtainedfrom a fit to the parameters d0, φ0, and t0 basedon the four-hit track segments in the DCH su-perlayers. Next, tracks are selected by perform-ing helix fits to the hits found by the L3 trackfinding algorithm. A search for additional hits inthe DCH that may belong on these tracks is per-formed, while t0 is further improved by using onlyhits associated with tracks. Two more sophisti-cated tracking procedures are applied which aredesigned to find tracks that either do not passthrough the entire DCH or do not originate fromthe IP. These algorithms primarily use track seg-ments that have not already been assigned toother tracks, and thus benefit from a progressivelycleaner tracking environment with a constantlyimproving t0. At the end of this process, tracksare again fit using a Kalman filter method.

47
Polar Angle (radians)
Transverse Momentum (GeV/c)
Effi
cien
cy
0.6
0.8
1.0
0.6
0.8
1.0
Effi
cien
cy
0 1 2
3-2001 8583A40
1960 V
1900 V
a)
1960 V
1900 V
b)
0.0 0.5 1.51.0 2.0 2.5
Figure 40. The track reconstruction efficiencyin the DCH at operating voltages of 1900 V and1960 V, as a function of a) transverse momentum,and b) polar angle. The efficiency is measured inmulti-hadron events as the fraction of all tracksdetected in the SVT for which the DCH portionis also reconstructed.
The resulting tracks are then extrapolated intothe SVT, and SVT track segments are added, pro-vided they are consistent with the expected errorin the extrapolation through the intervening ma-terial and inhomogeneous magnetic field. Amongthe possible SVT segments, those with the small-est residuals and the largest number of SVT layersare retained and a Kalman fit is performed to thefull set of DCH and SVT hits.
Any remaining SVT hits are then passed totwo complementary standalone track finding al-gorithms. The first reconstructs tracks startingwith triplets of space points (matched φ and zhits) in layers 1, 3, and 5 of the SVT, and adding
0.140 0.150
2000
0
4000
6000
8000
10000
M(Kππ) – M(Kπ) (GeV/c2)
b)
5-2001 8583A46
Trac
ks/ 0
.25
MeV
/c2
Figure 41. Reconstruction of low momen-tum tracks: the mass difference, ∆M =M (K−π+π+)−M (K−π+), both for all detectedevents (data points) and for events in which thelow momentum pion is reconstructed both in theSVT and DCH (histogram). Backgrounds fromcombinatorics and fake tracks, as well as non-resonant data have been subtracted.
consistent space points from the other layers. Aminimum of four space points are required to forma good track. This algorithm is efficient over awide range of d0 and z0 values. The second al-gorithm starts with circle trajectories from φ hitsand then adds z hits to form helices. This al-gorithm is less sensitive to large combinatoricsand to missing z information for some of the SVTmodules.
Finally, an attempt is made to combine tracksthat are only found by one of the two trackingsystems and thus recover tracks scattered in thematerial of the support tube.
7.2. Tracking EfficiencyThe efficiency for reconstructing tracks in the
DCH has been measured as a function of trans-verse momentum, polar and azimuthal angles inmulti-track events. These measurements rely onspecific final states and exploit the fact that thetrack reconstruction can be performed indepen-dently in the SVT and the DCH.

48
DataSimulation
Transverse Momentum (GeV/c)
0
0.0
0.4
0.8
0.10.0 0.2 0.3 0.4
4000
8000
b)
a)
Trac
ks/1
0 M
eV/c
Effi
cien
cy
1-2001 8583A27
Figure 42. Monte Carlo studies of low momentumtracks in the SVT: a) comparison of data (contri-butions from combinatoric background and non-BB events have been subtracted) with simulationof the transverse momentum spectrum of pionsfrom D∗+ → D0π+ in BB events, and b) effi-ciency for slow pion detection derived from simu-lated events.
The absolute DCH tracking efficiency is deter-mined as the ratio of the number of reconstructedDCH tracks to the number of tracks detectedin the SVT, with the requirement that they fallwithin the acceptance of the DCH. Such stud-ies have been performed for different samples ofmulti-hadron events. Figure 40 shows the re-sult of one such study for the two voltage set-tings. The measurement errors are dominated bythe uncertainty in the correction for fake tracksin the SVT. At the design voltage of 1960 V,the efficiency averages 98 ± 1% per track above200 MeV/c and polar angle θ > 500 mrad. Thedata recorded at 1900 V show a reduction in effi-ciency by about 5% for tracks at close to normalincidence, indicating that the cells are not fullyefficient at this voltage.
The standalone SVT tracking algorithms havea high efficiency for tracks with low transversemomentum. This feature is important for the de-tection of D∗ decays. To study this efficiency,decays D∗+ → D0π+ are selected by recon-structing events of the type B → D∗+X fol-lowed by D∗+ → D0π+ → K−π+π+. For the
majority of these low momentum pions the mo-mentum resolution is limited by multiple scat-tering, but the production angle can be deter-mined from the signals in innermost layers ofthe SVT. Figure 41 shows the mass difference∆M = M (K−π+π+) − M (K−π+), for the to-tal sample and the subsample of events in whichthe slow pion has been reconstructed in both theSVT and the DCH. The difference in these twodistributions demonstrates the contribution fromSVT standalone tracking, both in terms of thegain of signal events and of resolution. The gainin efficiency is mostly at very low momenta, andthe resolution is impacted by multiple scatteringand limited track length of the slow pions. Toderive an estimate of the tracking efficiency forthese low momentum tracks, a detailed MonteCarlo simulation was performed. Specifically, thepion spectrum was derived from simulation of theinclusive D∗ production in BB events, and theMonte Carlo events were selected in the same wayas the data. A comparison of the detected slowpion spectrum with the Monte Carlo prediction ispresented in Figure 42. Based on this very goodagreement, the detection efficiency has been de-rived from the Monte Carlo simulation. The SVTsignificantly extends the capability of the chargedparticle detection down to transverse momenta of∼50 MeV/c.
7.3. Track Parameter ResolutionsThe resolution in the five track parameters is
monitored in OPR using e+e− and µ+µ− pairevents. It is further investigated offline for tracksin multi-hadron events and cosmic ray muons.
Cosmic rays that are recorded during normaldata-taking offer a simple way of studying thetrack parameter resolution. The upper and lowerhalves of the cosmic ray tracks traversing theDCH and the SVT are fit as two separate tracks,and the resolution is derived from the difference ofthe measured parameters for the two track halves.To assure that the tracks pass close to the beaminteraction point, cuts are applied on the d0, z0,and tanλ. The results of this comparison for thecoordinates of the point of closest approach andthe angles are shown in Figure 43 for tracks withmomenta above pt of 3 GeV/c. The distributions

49
0
400
800
Trac
ks
–0.2 0 0.2 –0.2 0.20 ∆z0 (mm)
–4 40∆tanλ (10-3)
∆d0 (mm) ∆Φ0 (mrad)1-2001 8583A29
a) b)
–4 0 4
c) d)
Figure 43. Measurements of the differences between the fitted track parameters of the two halves ofcosmic ray muons, with transverse momenta above 3 GeV/c, a) ∆d0, b) ∆z0, c) ∆φ0, and d) ∆ tanλ.
are symmetric; the non-Gaussian tails are small.The distributions for the differences in z0 andtanλ show a clear offset, attributed to residualproblems with the internal alignment of the SVT.Based on the full width at half maximum of thesedistributions the resolutions for single tracks canbe parametized as
σd0 = 23µm σφ0 = 0.43 mradσz0 = 29µm σtanλ = 0.53 · 10−3.
The dependence of the resolution in d0 and z0
on the transverse momentum pt is presented inFigure 44. The measurement is based on tracksin multi-hadron events. The resolution is deter-mined from the width of the distribution of thedifference between the measured parameters, d0
and z0, and the coordinates of the vertex recon-structed from the remaining tracks in the event.These distributions peak at zero, but have a tailfor positive values due to the effect of particle de-cays. Consequently, only the negative part of thedistributions reflects the measurement error andis used to extract the resolution. Event shapecuts and a cut on the χ2 of the vertex fit are ap-plied to reduce the effect of weak decays on thismeasurement. The contribution from the vertexerrors are removed from the measured resolutionsin quadrature. The d0 and z0 resolutions so mea-sured are about 25µm and 40µm respectively atpt = 3 GeV/c. These values agree well with ex-pectations, and are also in reasonable agreementwith the results obtained from cosmic rays.
Transverse Momentum (GeV/c)1-2001 8583A28
σ (
mm
)
σz0σd0
0
0.1
0.2
0.3
0.4
0 21 3
Figure 44. Resolution in the parameters d0 andz0 for tracks in multi-hadron events as a functionof the transverse momentum. The data are cor-rected for the effects of particle decays and ver-texing errors.
Figure 45 shows the estimated error in the mea-surement of the difference along the z-axis be-tween the vertices of the two neutral B mesons,one of them is fully reconstructed, the otherserves as a flavor tag. The rms width of 190µmis dominated by the reconstruction of the taggingB vertex, the rms resolution for the fully recon-structed B meson is 70µm. The data meet thedesign expectation [2].
While the position and angle measurementsnear the IP are dominated by the SVT measure-

50
0
200
400
0 0.2 0.4
σ∆z (mm)
Eve
nts/
8 µ
m
2-2001 8583A37
Figure 45. Distribution of the error on the dif-ference ∆z between the B meson vertices for asample of events in which one B0 is fully recon-structed.
ments, the DCH contributes primarily to the ptmeasurement. Figure 46 shows the resolution inthe transverse momentum derived from cosmicmuons. The data are well represented by a linearfunction,
σpt/pt = (0.13± 0.01)% · pt + (0.45± 0.03)%,
where the transverse momentum pt is measuredin GeV/c. These values for the resolution param-eters are very close to the initial estimates andcan be reproduced by Monte Carlo simulations.More sophisticated treatment of the DCH time-to-distance relations and overall resolution func-tion are presently under study.
Figure 47 shows the mass resolution for J/ψmesons reconstructed in the µ+µ− final state,averaged over all data currently available. Thereconstructed peak is centered 0.05% below theexpected value, this difference is attributed tothe remaining inaccuracies in the SVT and DCHalignment and in the magnetic field parameteriza-tion. The observed mass resolution differs by 15%for data recorded at the two DCH HV settings,it is 13.0± 0.3 MeV/c2 and 11.4± 0.3 MeV/c2 at1900 V and 1960 V, respectively.
0
1.0
2.0
0 4 8Transverse Momentum (GeV/c)
σ(p t
)/p t
(%
)
1-2001 8583A23
Figure 46. Resolution in the transverse mo-mentum pt determined from cosmic ray muonstraversing the DCH and SVT.
2000
1000
0
Ent
ries/
4M
eV/c
2
3.0 3.1 3.2Mass M(µ+µ−) (GeV/c2)2-2001
8583A35
Figure 47. Reconstruction of the decay J/ψ →µ+µ− in selected BB events.
7.4. SummaryThe two tracking devices, the SVT and DCH,
have been performing close to design expectationsfrom the start of operations. Studies of track res-olution at lower momenta and as a function ofpolar and azimuthal angles are still under way.Likewise, the position and angular resolution at

51
the entrance to the DIRC or EMC are still beingstudied. Such measurements are very sensitive tointernal alignment of the SVT and relative place-ment of the SVT and the DCH. A better under-standing will not only reduce the mass resolutionfor the reconstruction of exclusive states, it willalso be important for improvement of the perfor-mance of the DIRC.
8. DIRC
8.1. Purpose and Design RequirementsThe study of CP-violation requires the abil-
ity to tag the flavor of one of the B mesons viathe cascade decay b → c → s, while fully re-constructing the second B decay. The momentaof the kaons used for flavor tagging extend upto about 2 GeV/c, with most of them below 1GeV/c. On the other hand, pions and kaonsfrom the rare two-body decays B0 → π+π− andB0 → K+π− must be well-separated. Theyhave momenta between 1.7 and 4.2 GeV/c with astrong momentum-polar angle correlation of thetracks (higher momenta occur at more forwardangles because of the c.m. system boost) [4].
The Particle Identification (PID) systemshould be thin and uniform in terms of radiationlengths (to minimize degradation of the calorime-ter energy resolution) and small in the radial di-mension to reduce the volume, and hence, thecost of the calorimeter. Finally, for operation athigh luminosity, the PID system needs fast sig-nal response, and should be able to tolerate highbackgrounds.
The PID system being used in BABAR is a newkind of ring-imaging Cherenkov detector calledthe DIRC [56] (the acronym DIRC stands for De-tector of Internally Reflected Cherenkov light). Itis expected to be able to provide π/K separationof ∼ 4 σ or greater, for all tracks from B-mesondecays from the pion Cherenkov threshold up to4.2 GeV/c. PID below 700 MeV/c relies primar-ily on the dE/dx measurements in the DCH andSVT.
8.2. DIRC ConceptThe DIRC is based on the principle that the
magnitudes of angles are maintained upon re-
flection from a flat surface. Figure 48 shows aschematic of the DIRC geometry that illustratesthe principles of light production, transport, andimaging. The radiator material of the DIRC issynthetic, fused silica in the form of long, thinbars with rectangular cross section. These barsserve both as radiators and as light pipes for theportion of the light trapped in the radiator bytotal internal reflection. Fused, synthetic silica(Spectrosil [57]) is chosen because of its resistanceto ionizing radiation, its long attenuation length,large index of refraction, low chromatic dispersionwithin the wavelength acceptance of the DIRC,and because it allows an excellent optical finishon the surfaces of the bars [58].
In the following, the variable θc is used to des-ignate the Cherenkov angle, φc denotes the az-imuthal angle of a Cherenkov photon around thetrack direction, and n represents the mean indexof refraction of fused silica (n = 1.473), with thefamiliar relation cos θc = 1/nβ (β = v/c, v =velocity of the particle, c = velocity of light).
For particles with β ≈ 1, some photons will al-ways lie within the total internal reflection limit,and will be transported to either one or both endsof the bar, depending on the particle incident an-gle. To avoid instrumenting both ends of the barwith photon detectors, a mirror is placed at theforward end, perpendicular to the bar axis, toreflect incident photons to the backward, instru-mented end.
Once photons arrive at the instrumented end,most of them emerge into a water-filled expan-sion region, called the standoff box. A fused silicawedge at the exit of the bar reflects photons atlarge angles relative to the bar axis. It therebyreduces the size of the required detection sur-face and recovers those photons that would oth-erwise be lost due to internal reflection at thefused silica/water interface. The photons aredetected by an array of densely packed photo-multiplier tubes (PMTs), each surrounded by re-flecting light catcher cones [59] to capture lightwhich would otherwise miss the active area ofthe PMT. The PMTs are placed at a distanceof about 1.2 m from the bar end. The expectedCherenkov light pattern at this surface is essen-tially a conic section, where the cone opening-

52
Mirror
4.9 m
4 x 1.225m Bars glued end-to-end
Purified Water
Wedge
Track Trajectory
17.25 mm Thickness (35.00 mm Width)
Bar Box
PMT + Base 10,752 PMT's
Light Catcher
PMT Surface
Window
Standoff Box
Bar
1.17 m
8-2000 8524A6
Figure 48. Schematics of the DIRC fused silicaradiator bar and imaging region. Not shown is a6 mrad angle on the bottom surface of the wedge(see text).
angle is the Cherenkov production angle modi-fied by refraction at the exit from the fused silicawindow.
The DIRC is intrinsically a three-dimensionalimaging device, using the position and arrivaltime of the PMT signals. Photons generated ina bar are focused onto the phototube detectionsurface via a “pinhole” defined by the exit aper-ture of the bar. In order to associate the photonsignals with a track traversing a bar, the vectorpointing from the center of the bar end to thecenter of each PMT is taken as a measure of thephoton propagation angles αx, αy, and αz. Sincethe track position and angles are known from thetracking system, the three α angles can be usedto determine the two Cherenkov angles θc and φc.In addition, the arrival time of the signal providesan independent measurement of the propagationof the photon, and can be related to the propaga-tion angles α. This over-constraint on the anglesand the signal timing are particularly useful indealing with ambiguities in the signal association(see Section 8.6.1) and high background rates.
8.3. Mechanical Designand Physical Description
The DIRC bars are arranged in a 12-sidedpolygonal barrel. Because of the beam energy
asymmetry, particles are produced preferentiallyforward in the detector. To minimize interfer-ence with other detector systems in the forwardregion, the DIRC photon detector is placed at thebackward end.
The principal components of the DIRC areshown schematically in Figure 49. The barsare placed into 12 hermetically sealed containers,called bar boxes, made of very thin aluminum-hexcel panels. Each bar box, shown in Figure 50,contains 12 bars, for a total of 144 bars. Withina bar box the 12 bars are optically isolated by a∼ 150µm air gap between neighboring bars, en-forced by custom shims made from aluminum foil.
The bars are 17 mm-thick, 35 mm-wide, and 4.9m-long. Each bar is assembled from four 1.225 mpieces that are glued end-to-end; this length is thelongest high-quality bar currently obtainable [58,60].
The bars are supported at 600 mm intervals bysmall nylon buttons for optical isolation from thebar box. Each bar has a fused silica wedge gluedto it at the readout end. The wedge, made of thesame material as the bar, is 91 mm-long with verynearly the same width as the bars (33 mm) and atrapezoidal profile (27 mm-high at bar end, and79 mm at the light exit end). The bottom of thewedge (see Figure 48) has a slight (∼ 6 mrad) up-ward slope to minimize the displacement of thedownward reflected image due to the finite barthickness. The twelve wedges in a bar box areglued to a common 10 mm-thick fused silica win-dow, that provides the interface and seal to thepurified water in the standoff box.
The mechanical support of the DIRC, shownin Figure 49, is cantilevered from the steel ofthe IFR. The Strong Support Tube (SST) is asteel cylinder located inside the end doors of theIFR and provides the basic support for the entireDIRC. In turn, the SST is supported by a steelsupport gusset that fixes it to the barrel magnetsteel. It also minimizes the magnetic flux gapcaused by the DIRC bars extending through theflux return, and supports the axial load of the in-ner magnetic plug surrounding the beam in thisregion.
The bar boxes are supported in the active re-gion by an aluminum tube, the Central Support

53
Figure 49. Exploded view of the DIRC mechani-cal support structure. The steel magnetic shieldis not shown.
Figure 50. Schematics of the DIRC bar box as-sembly.
Tube (CST), attached to the SST via an alu-minum transition flange. The CST is a thin,double-walled, cylindrical shell, using aircraft-type construction with stressed aluminum skinsand bulkheads having riveted or glued joints. TheCST also provides the support for the DCH.
The standoff box is made of stainless steel,consisting of a cone, cylinder, and 12 sectors ofPMTs. It contains about 6,000 liters of purifiedwater. Water is used to fill this region becauseit is inexpensive and has an average index of re-fraction (n ≈ 1.346) reasonably close to that of
Figure 52. Transverse section of the nominalDIRC bar box imbedded in the CST. All dimen-sions are given in mm.
fused silica, thus minimizing the total internal re-flection at silica-water interface. Furthermore, itschromaticity index is a close match to that offused silica, effectively eliminating dispersion atthe silica-water interface. The steel gusset sup-ports the standoff box. A steel shield, supple-mented by a bucking coil, surrounds the standoffbox to reduce the field in the PMT region to be-low 1 Gauss [28].
The PMTs at the rear of the standoff box lieon a surface that is approximately toroidal. Eachof the 12 PMT sectors contains 896 PMTs (ETLmodel 9125 [61,62]) with 29 mm-diameter, in aclosely packed array inside the water volume. Adouble o-ring water seal is made between thePMTs and the wall of the standoff box. ThePMTs are installed from the inside of the standoffbox and connected via a feed-through to a basemounted outside. The hexagonal light catchercone is mounted in front of the photocathode ofeach PMT, which results in an effective active sur-face area light collection fraction of about 90%.The geometry of the DIRC is shown in Figures 51and 52.
The DIRC occupies 80 mm of radial space inthe central detector volume including supportsand construction tolerances, with a total of about17% radiation length thickness at normal inci-dence. The radiator bars subtend a solid anglecorresponding to about 94% of the azimuth and

54
Figure 51. Elevation view of the nominal DIRC system geometry. For clarity, the end plug is not shown.All dimensions are given in mm.
83% of the c.m. polar angle cosine.The distance from the end of the bar to the
PMTs is ∼ 1.17 m, which together with the sizeof the bars and PMTs, gives a geometric contri-bution to the single photon Cherenkov angle res-olution of ∼ 7 mrad. This value is slightly largerthan the rms spread of the photon production(dominated by a ∼ 5.4 mrad chromatic term) andtransmission dispersions. The overall single pho-ton resolution is estimated to be about 10 mrad.
8.3.1. Cherenkov Photon DetectionEfficiency
Figure 53 shows the contribution of various op-tical and electronic components of the DIRC tothe Cherenkov photon detection efficiency as afunction of wavelength. The data points per-tain to a particle entering the center of the barat 90. A typical design goal for the photontransport in the bar was that no single compo-nent should contribute more than 10–20% loss ofdetection efficiency. Satisfying this criterion re-quired an extremely high internal reflection coef-ficient of the bar surfaces (greater than 0.9992 perbounce), so that about 80% of the light is main-
tained after multiple bounces along the bars (365bounces in the example of Figure 53). The ultra-violet cut-off is at ∼ 300 nm, determined by theepoxy (Epotek 301-2 [63]) used to glue the fusedsilica bars together. The dominant contributorto the overall detection efficiency is the quantumefficiency of the PMT. Taking into account ad-ditional wavelength independent factors, such asthe PMT packing fraction and the geometricalefficiency for trapping Cherenkov photons in thefused silica bars via total internal reflection, theexpected number of photoelectrons (Npe) is ∼ 28for a β = 1 particle entering normal to the sur-face at the center of a bar, and increases by overa factor of two in the forward and backward di-rections.
8.3.2. DIRC Water SystemThe DIRC water system is designed to main-
tain good transparency at wavelengths as small as300 nm. One way to achieve this is to use ultra-pure, de-ionized water, close to the theoreticallimit of 18 MΩcm resistivity. In addition, the wa-ter must be de-gassed and the entire system keptfree of bacteria. Purified water is aggressive in at-

55
0
0.2
0.4
0.6
0.8
1
200 300 400 500 600 700
Wavelength [nm]
Tra
nsm
issi
on o
r R
efle
ctiv
ity o
r Q
.E.
Water transmission (1.2m)Mirror reflectivityInternal reflection coeff. (365 bounces)Epotek 301-2 transmission (25µm)EMI PMT 9215B quantum efficiency (Q.E.)PMT Q.E. ⊗ PMT window transmissionFinal Cherenkov photon detection efficiency
Figure 53. Transmission, reflectivity and quan-tum efficiency for various components of theDIRC as a function of wavelength for a β = 1particle at normal incidence to the center of abar [64].
tacking many materials, and those in contact withthe water were selected based on known compata-bility with purified water. To maintain the neces-sary level of water quality, most plumbing compo-nents are made of stainless steel or polyvinylidenefluoride.
The system contains an input line with sixmechanical filters (three 10 µm, two 5 µm, andone 1 µm), a reverse osmosis unit, de-ionizationbeds, a Teflon microtube de-gasser and variouspumps and valves. To prevent bacteria growth,it is equipped with a UV lamp (254 nm wave-length) and filters (two 1 µm, two 0.2 µm, andcharcoal filters). Sampling ports are provided tocheck the water quality and to monitor resistivity,
pH-value, temperature, and flow. A gravity feedreturn system prevents overpressure. The entirestandoff box water volume can be recirculated upto four times a day.
The operating experience with the water sys-tem so far has been very good. The water volumeis exchanged every ten hours and the resistivityof the water is typically 18 MΩcm in the sup-ply line and 8–10 MΩcm in the return line at atemperature of about 23–26C. The pH-value isabout 6.5 and 6.6-6.7 in the supply and returnwater, respectively. The water transparency isroutinely measured using lasers of three differ-ent wavelengths. The transmission is better than92% per meter at 266 nm and exceeds 98% permeter at 325 nm and 442 nm.
Potential leaks from the water seals betweenthe bar boxes and the standoff box are detectedby a water leak detection system of 20 custom wa-ter sensors in and about the bar box slots. Twocommercial ultrasonic flow sensors are used tomonitor water flow in two (normally dry) drainlines in addition to the 12 humidity sensors on anitrogen gas output line from each bar box (seebelow). Should water be detected, a valve in a100 mm diameter drain line is opened, and theentire system is drained in about 12 minutes.
All elements inside the standoff box (PMT,plastic PMT housing, gaskets, light catchers)were tested at normal and elevated temperaturesto withstand the highly corrosive action of ultra-pure water and to prevent its pollution. For in-stance, rhodium-plated mirrors on ULTEM sup-port had to be used for the light catchers [59].
8.3.3. DIRC Gas SystemNitrogen gas from liquid nitrogen boil-off is
used to prevent moisture from condensing on thebars, and used also to detect water leaks. Thegas flows through each bar box at the rate of100–200 cm3/min, and is monitored for humid-ity to ensure that the water seal around the barbox remains tight. The gas is filtered through amolecular sieve and three mechanical filters to re-move particulates (7 µm, 0.5 µm, and 0.01 µm).Dew points of the gas returned from the bar boxesare about -40C. Approximately one third of theinput nitrogen gas leaks from the bar boxes and

56
keeps the bar box slots in the mechanical supportstructure free of condensation.
8.4. Electronics8.4.1. DIRC PMT Electronics
The DIRC PMT base contains a single printedcircuit board, equipped with surface mountedcomponents. The operating high voltage (HV)of the PMTs is ∼ 1.14 kV, with a range between0.9 and 1.3 kV. Groups of 16 tubes are selectedfor uniformity of gain to allow their operation ata common HV provided from a single distributionboard.
The HV is provided by a CAEN SY-527 highvoltage distribution system. Each of the 12 sec-tors receives HV through 56 high voltage chan-nels, distributed through a single cable bundle.Each voltage can be set between 0 and 1.6 kV.
8.4.2. DIRC Front-End ElectronicsThe DIRC front-end electronics (FEE) is de-
signed to measure the arrival time of eachCherenkov photon detected by the PMT ar-ray [65] to an accuracy that is limited by the in-trinsic 1.5 ns transit time spread of the PMTs.The design contains a pipeline to deal with theL1 trigger latency of 12µ s, and can handle ran-dom background rates of up to 200 kHz/PMTwith zero dead time. In addition, the pulse heightspectra can be measured to ensure that the PMTsoperate on the HV plateau. However, because theADC information is not needed to reconstructevents, 64 PMTs are multiplexed onto a singleADC for monitoring and calibration.
The DIRC FEE is mounted on the outside ofthe standoff box and is highly integrated in or-der to minimize cable lengths and to retain therequired single photoelectron sensitivity. Eachof the 168 DIRC Front-end Boards (DFBs) pro-cesses 64 PMT inputs, containing eight customanalog chips along with their associated leveltranslators, four custom-made TDC ICs, one 8-bit flash ADC (FADC), two digitally controlledcalibration signal generators, multi-event buffers,and test hardware.
The PMT signals are amplified, and pulse-shaped by an eight-channel analog IC [66]. Adigital pulse timed with the peak of the input
pulse is output by a zero-crossing discriminator,as well as a pulse shaped by a CR-RC filter with80 ns peaking time, which was chosen to allowfor the ADC multiplexing. The multiplexer se-lects the channel to be digitized by the FADC forcalibration.
The TDC IC [67] is a 16-channel TDC with0.5 ns binning, input buffering, and selective read-out of the data in time with the trigger. To copewith the L1 maximum trigger latency of 12 µsand jitter of 1µs, the selective readout process ex-tracts data in time with the trigger within a pro-grammable time window. The acceptance win-dow width is programmable between 64 ns and2 µs and is typically set at 600 ns. The twelveDIRC Crate Controllers (DCCs) that form theinterface to the VME front-end crates are con-nected to six ROMs via 1.2 Gbit/s optical fibers.
8.4.3. DAQ Feature ExtractionRaw data from the DFBs are processed in
the ROMs by a feature extraction algorithm be-fore being transmitted to the segment and eventbuilder. This software algorithm reduces thedata volume by roughly 50% under typical back-ground conditions. DFB data that contain er-rors are flagged and discarded. The only dataerrors seen to date have been traced to dam-aged DFBs that were replaced immediately. Be-cause the dataflow system can reliably transmitat most 32 kBytes/crate, the feature extractionmust sometimes truncate data to limit the eventsize. Event data are replaced with a per-DFBoccupancy summary when a ROM’s hit occu-pancy exceeds 56%, which occurs about once in104 events. An appropriate flag is inserted intothe feature extraction output whenever trunca-tion or deletion occurs. Errors, truncation, andfeature extraction performance are continuouslymonitored online, and exceptions are either im-mediately corrected or logged for future action.
8.4.4. DIRC CalibrationThe DIRC uses two independent approaches for
a calibration of the unknown PMT time responseand the delays introduced by the FEE and thefast control system. The first is a conventionalpulser calibration. The second uses reconstructed

57
tracks from collision data.The pulser calibration is performed online us-
ing a light pulser system which generates preciselytimed 1 ns duration light pulses from twelve, blueLEDs, one per sector. The LEDs are triggeredby the global fast control calibration strobe com-mand sent to the DCCs. The DCC triggers anindividual LED for each sector upon receipt ofcalibration strobe. Pulses in adjacent sectors arestaggered by 50 ns to prevent light crosstalk be-tween sectors. The pulser is run at roughly 2 kHzfor the time delay calibration. The LED light istransmitted through approximately 47 m-long op-tical fibers to diffusers mounted on the inner sur-face of the standoff box wall opposite the PMTs.This light produces about 10% photoelectron oc-cupancy nearly uniformly throughout the stand-off box.
Histograms of TDC times for each PMT are ac-cumulated in parallel in the ROMs, and then fitto an asymmetric peak function. About 65,000light pulses are used to determine the mean timedelay of each of the PMTs in the standoff box toa statistical accuracy of better than 0.1 ns. TheLED pulser is also used to monitor the photo-tube gains using the ADC readout. As with theTDC calibration, histograms and fits of the ADCspectrum are accumulated and fit in the ROM.A calibration run including both TDC and ADCinformation for all PMTs requires a few minutes,and is run once per day. Daily calibrations notonly verify the time delays, but allow the detec-tion of hardware failures.
The data stream calibration uses reconstructedtracks from the collision data. For calibration ofthe global time delay, the observed, uncalibratedtimes minus the expected arrival times, ∆tγ , arecollected during the online prompt reconstructionprocessing. To calculate individual channel cali-brations, ∆tγ values for each DIRC channel areaccumulated until statistics equivalent to 100,000tracks are collected. The distribution for eachchannel is fit to extract the global time offset cal-ibration.
The data stream and online pulser calibrationsof the electronic delays, and of the PMT timeresponse and gain yield fully consistent results,although the data stream results in 15% better
timing resolution than the pulser calibration. Thetime delay values per channel are typically stableto an rms of less than 0.1 ns over more than oneyear of daily calibrations.
8.4.5. DIRC Environmental MonitoringSystem
The DIRC environmental monitoring system isdivided into three parts, corresponding to threeseparate tasks. The first deals with the controland monitoring of the HV system for the PMTs.The second is devoted to monitoring low voltagesrelated to the FEE. The third controls a varietyof other detector parameter settings. An inter-lock system, based on a standard VME module(SIAM), is provided. For the purposes of theDIRC, three dedicated VME CPUs run the appli-cation code. The communication between the HVmainframes and the monitoring crate is achievedby a CAENET controller (V288). The HV mon-itor task controls the step sizes for ramping theHV up or down, as well as the communication ofalarm conditions, and the values and limits forthe HV and current of each channel.
The purpose of FEE monitoring is to con-trol and monitor parameters related to theFEE. For each DIRC sector, a custom multi-purpose board, the DCC, equipped with a micro-controller [68] incorporating the appropriate com-munication protocol (CANbus), is situated in thesame crate as the DFB. All monitoring and con-trol tasks are implemented on this card. The pa-rameters monitored are the low voltages for theDFBs and DCCs, the status of the optical link(Finisar), the temperature on supply boards, andthe VME crate status.
The third part of the monitoring system isbased on a custom ADC VME board (VSAM),used to monitor various type of sensors: magneticfield sensors, an ensemble of 12 beam monitoringscalers, 16 CsI radiation monitors, the water levelin the standoff box as well as its pH-value, resis-tivity, and temperature.
8.5. Operational IssuesThe DIRC was successfully commissioned and
attained performance close to that expected fromMonte Carlo simulation. The DIRC has been

58
Figure 54. Display of an e+e− → µ+µ− event reconstructed in BABAR with two different time cuts. Onthe left, all DIRC PMTs with signals within the ±300 ns trigger window are shown. On the right, onlythose PMTs with signals within 8 ns of the expected Cherenkov photon arrival time are displayed.
robust and stable, and, indeed, serves also asa background detector for PEP-II tuning. Fig-ure 54 shows a typical di-muon event (e+e− →µ+µ−). In addition to the signals caused by theCherenkov light from the two tracks, about 500background signals can be seen in the readoutwindow of ±300 ns. This background is dom-inated by low energy photons from the PEP-IImachine hitting the standoff box. Some care inmachine tuning is required to stay under a noiselimit of about 200 kHz/tube imposed by limitedDAQ throughput. Lead shielding has been in-stalled around the beam line components justoutside the backward endcap, and has substan-tially reduced this background.
After about two years of running, approxi-mately 99.7% of PMTs and electronic channelsare operating with nominal performance.
Some deterioration of the PMT front glass win-dows (made of B53 Borosilicate glass) that are im-mersed in the ultra-pure water of the standoff boxhas been observed. For most of the tubes, the ob-servable effect is typically a slight cloudiness, butfor about 50 tubes, it is much more pronounced.Extensive R&D has demonstrated that the effect
is associated with a loss of sodium and boron fromthe surface of the glass [69]. For most tubes, theleaching rate is a few microns per year, and is ex-pected to be acceptable for the full projected tenyear lifetime of the experiment. However, for the∼ 50 tubes, the incorrect glass was used by themanufacturer. That glass does not contain zinc,making it much more susceptible to rapid leach-ing. This leaching may eventually lead to eithera loss of performance, or some risk of mechanicalfailure of the face plates for these tubes. Directmeasurements of the number of Cherenkov pho-tons observed in di-muon events as a function oftime suggest that the total loss of photons fromall sources is less than 2%/year.
8.6. Data Analysis and PerformanceFigure 54 shows the pattern of Cherenkov
photons in a di-muon event, before and afterreconstruction. The time distribution of realCherenkov photons from a single event is of order∼ 50 ns wide, and during normal data-taking theyare accompanied by hundreds of random photonsin a flat background within the trigger acceptancewindow. Given a track pointing at a particular

59
fused silica bar and a candidate signal in a PMTwithin the optical phase space of that bar, theCherenkov angle is determined up to a 16-foldambiguity: top or bottom, left or right, forwardor backward, and wedge or no-wedge reflections.The goal of the reconstruction program is to as-sociate the correct track with the candidate PMTsignal, with the requirement that the transit timeof the photon from its creation in the bar to itsdetection at the PMT be consistent with the mea-surement error of ∼ 1.5 ns.
8.6.1. ReconstructionAn unbinned maximum likelihood formalism is
used to incorporate all information provided bythe space and time measurements from the DIRC.
The emission angle and the arrival time ofthe Cherenkov photons are reconstructed fromthe observed space-time coordinates of the PMTsignals, transformed into the Cherenkov coordi-nate system (θc, φc, and δt) as follows: Theknown spatial position of the bar through whichthe track passed and the PMTs whose signaltimes lie within the readout window of ±300 nsfrom the trigger are used to calculate the three-dimensional vector pointing from the center of thebar end to the center of each tube. This vectoris then extrapolated into the radiator bar (usingSnell’s law). This procedure defines, up to the16-fold ambiguity described above, the angles θcand φc of a photon.
The DIRC time measurement represents thethird dimension of the photomultiplier hit recon-struction. The timing resolution is not competi-tive with the position information for Cherenkovangle reconstruction, but timing information isused to suppress background hits from the beaminduced background and, more importantly, ex-clude other tracks in the same event as the sourceof the photon. Timing information is also used toresolve the forward-backward and wedge ambigu-ities in the hit-to-track association.
The relevant observable to distinguish betweensignal and background photons is the differencebetween the measured and expected photon ar-rival time, ∆tγ . It is calculated for each photonusing the track time-of-flight (assuming it to bea charged pion), the measured time of the can-
didate signal in the PMT and the photon prop-agation time within the bar and the water filledstandoff box. The time information and the re-quirement of using only physically possible pho-ton propagation paths reduce the number of am-biguities from 16 to typically 3. Applying thetime information also substantially improves thecorrect matching of photons with tracks and re-duces the number of accelerator induced back-ground signals by approximately a factor 40, asillustrated in Figure 54.
The reconstruction routine currently provides alikelihood value for each of the five stable particletypes (e,µ,π,K,p) if the track passes through theactive volume of the DIRC. These likelihoods arecalculated in an iterative process by maximizingthe likelihood value for the entire event while test-ing different hypotheses for each track. If enoughphotons are found, a fit of θc and the number ofobserved signal and background photons are cal-culated for each track.
8.6.2. ResultsThe parameters of expected DIRC performance
were derived from extensive studies with a va-riety of prototypes, culminating with a full-sizeprototype in a beam at CERN [70]. The testbeam results were well-described by Monte Carlosimulations of the detector. The performance ofthe full detector is close to expectations, and ad-ditional offline work, particularly on geometricalalignment, is expected to lead to further improve-ments.
In the absence of correlated systematic errors,the resolution (σC,track) on the track Cherenkovangle should scale as
σC,track =σC,γ√Npe
, (5)
where σC,γ is the single photon Cherenkov an-gle resolution, and Npe is the number of photonsdetected. Figure 55(a) shows the single photonangular resolution obtained from di-muon events.There is a broad background of less than 10%relative height under the peak, that originatesmostly from track-associated sources, such as δrays, and combinatorial background. The widthof the peak translates to a resolution of about

60
0
20000
40000
60000
80000
-5 0 5
0
20000
40000
60000
80000
-100 -50 0 50 100
∆ θC,γ (mrad)
entr
ies
per
mra
d
∆ tγ (ns)
entr
ies
per
0.2n
s
(a)
(b)
Figure 55. The difference between (a) the mea-sured and expected Cherenkov angle for singlephotons, ∆θc,γ , and (b) the measured and ex-pected photon arrival time, for single muons inµ+µ− events.
10.2 mrad, in good agreement with the expectedvalue. The measured time resolution (see Fig-ure 55(b)) is 1.7 ns, close to the intrinsic 1.5 nstransit time spread of the PMTs.
The number of photoelectrons shown in Fig-ure 56 varies between 20 for small polar angles atthe center of the barrel and 65 at large polar an-gles. This variation is well reproduced by MonteCarlo simulation, and can be understood from thegeometry of the DIRC. The number of Cherenkovphotons varies with the pathlength of the trackin the radiator, it is smallest at perpendicular in-cidence at the center and increases towards theends of the bars. In addition, the fraction of pho-tons trapped by total internal reflection rises withlarger values of | cos θtrack|. This increase in thenumber of photons for forward going tracks is agood match to the increase in momentum andthus benefits the DIRC performance.
With the present alignment, the trackCherenkov angle resolution for di-muon events is
0
20
40
60
80
-1 -0.5 0 0.5 1
cosθtrack
⟨ Nγ⟩
Data
Monte Carlo Simulation
Figure 56. Number of detected photons versustrack polar angle for reconstructed tracks in di-muon events compared to Monte Carlos simula-tion. The mean number of photons in the simu-lation has been tuned to match the data.
shown in Figure 57. The width of the fitted Gaus-sian distribution is 2.5mrad compared to the de-sign goal of 2.2 mrad. From the measured sin-gle track resolution versus momentum in di-muonevents and the difference between the expectedCherenkov angles of charged pions and kaons, thepion-kaon separation power of the DIRC can beinferred. As shown in Figure 58, the expectedseparation between kaons and pions at 3 GeV/cis about 4.2σ, within 15% of the design goal.
Figure 59 shows an example of the use of theDIRC for particle identification. The Kπ invari-ant mass spectra are shown with and without theuse of the DIRC for kaon identification. The peakcorresponds to the decay of the D0 particle.
The efficiency for correctly identifying acharged kaon that traverses a radiator bar andthe probability to wrongly identify a pion as akaon are determined using D0 → K−π+ decaysselected kinematically from inclusive D∗ produc-tion and are shown as a function of the trackmomentum in Figure 60 for a particular choiceof particle selection criteria. The mean kaon se-lection efficiency and pion misidentification are96.2±0.2% (stat.) and 2.1±0.1% (stat.), respec-tively.

61
0
20000
40000
60000
-10 0 10
e+e– → µ+µ–
∆θC,track (mrad)
Tra
cks
Figure 57. The difference between the measuredand expected Cherenkov angle, ∆θc,track, for sin-gle muons in µ+µ− events. The curve represents aGaussian distribution fit to the data with a widthof 2.5 mrad.
B0 → π+π–
Momentum (GeV/c )
Exp
ecte
d π-
K S
epar
atio
n
(σ)
0
2
4
6
8
10
2 3 4
Figure 58. Expected π-K separation in B0 →π+π− events versus track momentum inferredfrom the measured Cherenkov angle resolutionand number of Cherenkov photons per track indi-muon events.
0
500
1000
1500
x 10 2
1.75 1.8 1.85 1.9 1.95
Kπ mass (GeV/c2)
entr
ies
per
5 M
eV/c
2
Without DIRC
With DIRC
Figure 59. Invariant Kπ inclusive mass spectrumwith and without the use of the DIRC for kaonidentification. The mass peak corresponds to thedecay of the D0 particle.
Kao
n E
ffic
ienc
y
Track Momentum (GeV/c)
π M
is-I
D a
s K
0.6
0.7
0.8
0.9
1
0
0.1
0.2
1 2 3
Figure 60. Efficiency and misidentification prob-ability for the selection of charged kaons as afunction of track momentum, determined usingD0 → K−π+ decays selected kinematically frominclusive D∗ production.

62
8.7. SummaryThe DIRC is a novel ring-imaging Cherenkov
detector that is well-matched to the hadronic PIDrequirements of BABAR. The DIRC has been ro-bust and stable and, two years after installation,about 99.7% of all PMTs and electronic channelsare operating with nominal performance. Addi-tional shielding in the standoff box tunnel regionshould reduce the sensitivity to beam-inducedbackgrounds, as should faster FEE, both installedduring the winter 2000-2001 shutdown. At lumi-nosities around 1 × 1034 cm−2s−1, the TDC ICwill have to be replaced with a faster version anddeeper buffering. The design process for this isunderway.
The detector performance achieved is ratherclose to that predicted by the Monte Carlo sim-ulations. Alignment and further code develop-ments are expected to further improve perfor-mance.
9. Electromagnetic Calorimeter
9.1. Purpose and DesignThe electromagnetic calorimeter (EMC) is de-
signed to measure electromagnetic showers withexcellent efficiency, and energy and angular res-olution over the energy range from 20 MeV to9 GeV. This capability allows the detection ofphotons from π0 and η decays as well as from elec-tromagnetic and radiative processes. By identify-ing electrons, the EMC contributes to the flavortagging of neutral B mesons via semi-leptonic de-cays, to the reconstruction of vector mesons likeJ/ψ , and to the study of semi-leptonic and raredecays of B and D mesons, and τ leptons. Theupper bound of the energy range is set by the needto measure QED processes, like e+e− → e+e−(γ)and e+e− → γγ, for calibration and luminos-ity determination. The lower bound is set bythe need for highly efficient reconstruction of B-meson decays containing multiple π0s and η0s.
9.1.1. RequirementsThe measurement of extremely rare decays of
B mesons containing π0s (e.g., B0 → π0π0) posesthe most stringent requirements on energy reso-lution, namely of order 1–2%. Below energies of
2 GeV, the π0 mass resolution is dominated bythe energy resolution. At higher energies, the an-gular resolution becomes dominant, and thereforeit is required to be of the order of a few mrad.
Furthermore, the EMC has to be compatiblewith the 1.5T field of the solenoid and operate re-liably over the anticipated ten-year lifetime of theexperiment. To achieve excellent resolution, sta-ble operating conditions have to be maintained.Temperatures and the radiation exposure mustbe closely monitored, and precise calibrations ofthe electronics and energy response over the fulldynamic range must be performed frequently.
9.1.2. Design ConsiderationsThe requirements stated above lead to the
choice of a hermetic, total-absorption calorime-ter, composed of a finely segmented array ofthallium-doped cesium iodide (CsI(Tl)) crystals.The crystals are read out with silicon photodi-odes that are matched to the spectrum of scin-tillation light. Recent experience at CLEO [71]has demonstrated the suitability of this choice forphysics at the Υ (4S) resonance.
The energy resolution of a homogeneous crystalcalorimeter can be described empirically in termsof a sum of two terms added in quadrature
σEE
=a
4√E( GeV)
⊕ b, (6)
where E and σE refer to the energy of a photonand its rms error, measured in GeV. The energydependent term a arises primarily from the fluctu-ations in photon statistics, but it is also impactedby electronic noise of the photon detector andelectronics. Furthermore, beam-generated back-ground will lead to large numbers of additionalphotons that add to the noise. This term is dom-inant at low energies. The constant term, b, isdominant at higher energies (> 1 GeV). It arisesfrom non-uniformity in light collection, leakage orabsorption in the material between and in front ofthe crystals, and uncertainties in the calibrations.Most of these effects can be influenced by designchoices, and they are stable with time. Otherswill be impacted by changes in the operating con-ditions, like variations in temperature, electronicsgain, and noise, as well as by radiation damage

63
caused by beam-generated radiation.The angular resolution is determined by the
transverse crystal size and the distance from theinteraction point. It can also be empirically pa-rameterized as a sum of an energy dependent anda constant term,
σθ = σφ =c√
E( GeV)+ d, (7)
where the energy E is measured in GeV. The de-sign of the EMC required a careful optimizationof a wide range of choices, including the crystalmaterial and dimensions, the choice of the photondetector and readout electronics, and the designof a calibration and monitoring system. Thesechoices were made on the basis of extensive stud-ies, prototyping and beam tests [72], and MonteCarlo simulation, taking into account limitationsof space and the impact of other BABAR detectorsystems.
Under ideal conditions, values for the energyresolution parameters a and b close to 1–2% couldbe obtained. A position resolution of a few mmwill translate into an angular resolution of a fewmrad; corresponding parameter values are c ≈3 mrad and d ≈ 1 mrad.
However in practice, such performance is verydifficult to achieve in a large system with a small,but unavoidable amount of inert material andgaps, limitations of electronics, and backgroundin multi-particle events, plus contributions frombeam-generated background.
Though in CsI(Tl) the intrinsic efficiency forthe detection of photons is close to 100% downto a few MeV, the minimum measurable en-ergy in colliding beam data is expected to beabout 20 MeV, a limit that is largely determinedby beam- and event-related background and theamount of material in front of the calorimeter.Because of the sensitivity of the π0 efficiency tothe minimum detectable photon energy, it is ex-tremely important to keep the amount of materialin front of the EMC to the lowest possible level.
9.1.3. CsI(Tl) CrystalsThallium-doped CsI meets the needs of BABAR
in several ways. Its properties are listed in Ta-ble 11. The high light yield and small Moliere
Table 11Properties of CsI(Tl) .
Parameter Values
Radiation Length 1.85 cmMoliere Radius 3.8 cmDensity 4.53 g/cm3
Light Yield 50,000 γ/MeVLight Yield Temp. Coeff. 0.28%/CPeak Emission λmax 565 nmRefractive Index (λmax) 1.80Signal Decay Time 680 ns (64%)
3.34 µs (36%)
radius allow for excellent energy and angular res-olution, while the short radiation length allowsfor shower containment at BABAR energies with arelatively compact design. Furthermore, the highlight yield and the emission spectrum permit effi-cient use of silicon photodiodes which operate wellin high magnetic fields. The transverse size of thecrystals is chosen to be comparable to the Moliereradius achieving the required angular resolutionat low energies while appropriately limiting thetotal number of crystals (and readout channels).
9.2. Layout and Assembly9.2.1. Overall Layout
The EMC consists of a cylindrical barrel anda conical forward endcap. It has full coverage inazimuth and extends in polar angle from 15.8
to 141.8 corresponding to a solid-angle cover-age of 90% in the c.m. system (see Figure 61and Table 12). The barrel contains 5,760 crystalsarranged in 48 distinct rings with 120 identicalcrystals each. The endcap holds 820 crystals ar-ranged in eight rings, adding up to a total of 6,580crystals. The crystals have a tapered trapezoidalcross section. The length of the crystals increasesfrom 29.6 cm in the backward to 32.4 cm in theforward direction to limit the effects of showerleakage from increasingly higher energy particles.
To minimize the probability of pre-showering,the crystals are supported at the outer radius,with only a thin gas seal at the front. The barreland outer five rings of the endcap have less than0.3–0.6X0 of material in front of the crystal faces.

64
11271375920
1555 2295
2359
1801
558
1979
22.7˚
26.8˚
15.8˚
Interaction Point 1-2001 8572A03
38.2˚
External Support
Figure 61. A longitudinal cross section of the EMC (only the top half is shown) indicating the arrangementof the 56 crystal rings. The detector is axially symmetric around the z-axis. All dimensions are given inmm.
Table 12Layout of the EMC, composed of 56 axially sym-metric rings, each consisting of CsI crystals ofidentical dimensions.
θ Interval Length # Crystals(radians) (X0) Rings /Ring
Barrel
2.456− 1.214 16.0 27 1201.213− 0.902 16.5 7 1200.901− 0.655 17.0 7 1200.654− 0.473 17.5 7 120
Endcap
0.469− 0.398 17.5 3 1200.397− 0.327 17.5 3 1000.326− 0.301 17.5 1 800.300− 0.277 16.5 1 80
The SVT support structure and electronics, aswell as the B1 dipole shadow the inner three ringsof the endcap, resulting in up to 3.0X0 for theinnermost ring. The principal purpose of the twoinnermost rings is to enhance shower containmentfor particles close to the acceptance limit.
9.2.2. Crystal Fabrication and AssemblyThe crystals were grown in boules from a melt
of CsI salt doped with 0.1% thallium [73]. Theywere cut from the boules, machined into taperedtrapezoids (Figure 62) to a tolerance of ±150µm,and then polished [74]. The transverse dimen-sions of the crystals for each of the 56 rings vary toachieve the required hermetic coverage. The typi-cal area of the front face is 4.7×4.7 cm2, while theback face area is typically 6.1×6.0 cm2. The crys-tals act not only as a total-absorption scintillatingmedium, but also as a light guide to collect lightat the photodiodes that are mounted on the rearsurface. At the polished crystal surface light isinternally reflected, and a small fraction is trans-mitted. The transmitted light is recovered in partby wrapping the crystal with two layers of diffusewhite reflector [75,76], each 165µm thick. Theuniformity of light yield along the wrapped crys-tal was measured by recording the signal from ahighly collimated radioactive source at 20 pointsalong the length of the crystal. The light yieldwas required to be uniform to within ±2% in thefront half of the crystal; the limit increased lin-early up to a maximum of ±5% at the rear face.Adjustments were made on individual crystals tomeet these criteria by selectively roughing or pol-

65
CsI(Tl) Crystal
Diode Carrier Plate
Silicon Photo-diodes
Preamplifier BoardFiber Optical Cable
to Light Pulser
Aluminum Frame
TYVEK (Reflector)
Mylar (Electrical Insulation)
Aluminum Foil
(R.F. Shield)
CFC Compartments (Mechanical
Support)
Output Cable
11-2000 8572A02
Figure 62. A schematic of the wrappedCsI(Tl) crystal and the front-end readout packagemounted on the rear face. Also indicated is thetapered, trapezoidal CFC compartment, which isopen at the front. This drawing is not to scale.
ishing the crystal surface to reduce or increase itsreflectivity.
Following these checks, the crystals were fur-ther wrapped in 25µm thick aluminum foil whichwas electrically connected to the metal housing ofthe photodiode-preamplifier assembly to providea Faraday shield. The crystals were covered onthe outside with a 13µm-thick layer of mylar toassure electrical isolation from the external sup-port.
9.2.3. Photodiodesand Preamplifier Assembly
The photon detector consists of two 2 × 1 cm2
silicon PIN diodes glued to a transparent 1.2 mm-
thick polysterene substrate that, in turn, is gluedto the center of the rear face of the crystal byan optical epoxy [77] to maximize light transmis-sion [78]. The surrounding area of the crystal faceis covered by a plastic plate coated with whitereflective paint [79]. The plate has two 3 mm-diameter penetrations for the fibers of the lightpulser monitoring system.
As part of the quality control process, the1.836 MeV photon line from a 88Y radioactivesource was used to measure the light yield of everycrystal-diode assembly, employing a preamplifierwith 2µs Gaussian shaping. The resulting signaldistribution had a mean and rms width of 7300and 890 photoelectrons/MeV, respectively; noneof the crystals had a signal of less than 4600 pho-toelectrons/MeV [78,80].
Each of the diodes is directly connected to alow-noise preamplifier. The entire assembly is en-closed by an aluminum fixture as shown in Fig-ure 62. This fixture is electrically coupled to thealuminum foil wrapped around the crystal andthermally coupled to the support frame to dissi-pate the heat load from the preamplifiers.
Extensive aging tests were performed to ascer-tain that the diodes and the preamplifiers met theten-year lifetime requirements. In addition, dailythermal cycles of±5C were run for many monthsto assure that the diode-crystal epoxy joint couldsustain modest temperature variations.
9.2.4. Crystal Support StructureThe crystals are inserted into modules that are
supported individually from an external supportstructure. This structure is built in three sec-tions, a cylinder for the barrel and two semi-circular structures for the forward endcap. Thebarrel support cylinder carries the load of the bar-rel modules plus the forward endcap to the mag-net iron through four flexible supports. Thesesupports decouple and dampen any accelerationinduced by movements of the magnet iron duringa potential earthquake.
The modules are built from tapered, trape-zoidal compartments made from carbon-fiber-epoxy composite (CFC) with 300µm-thick walls(Figure 63). Each compartment loosely holdsa single wrapped and instrumented crystal and

66
IOB
Aluminum Support Cylinder
Electronic Mini–Crates
Aluminum RF Shield4 m
0.9 m0.48 m
3-20018572A06
Cooling Channels
Cu Heat Sink
Bulkhead
Fan OutBoard
ADBs
Detail of Mini–Crate
Aluminum Strongback
MountingFeatures
Cableway
Carbon Fiber Tubes
Detail of Module
Figure 63. The EMC barrel support structure, with details on the modules and electronics crates (notto scale).
thus assures that the forces on the crystal sur-faces never exceed its own weight. Each moduleis surrounded by an additional layer of 300µmCFC to provide additional strength. The mod-ules are bonded to an aluminum strong-back thatis mounted on the external support. This schememinimizes inter-crystal materials while exertingminimal force on the crystal surfaces; this pre-vents deformations and surface degradation thatcould compromise performance. By supportingthe modules at the back, the material in front ofthe crystals is kept to a minimum.
The barrel section is divided into 280 sepa-rate modules, each holding 21 crystals (7 × 3 inθ × φ). After the insertion of the crystals, thealuminum readout frames, which also stiffen themodule, are attached with thermally-conductingepoxy to each of the CFC compartments. The en-tire 100 kg-module is then bolted and again ther-mally epoxied to an aluminum strong-back. Thestrong-back contains alignment features as wellas channels that couple into the cooling system.
Each module was installed into the 2.5 cm-thick,4 m-long aluminum support cylinder, and subse-quently aligned. On each of the thick annularend-flanges this cylinder contains access ports fordigitizing electronics crates with associated cool-ing channels, as well as mounting features andalignment dowels for the forward endcap.
The endcap is constructed from 20 identicalCFC modules (each with 41 crystals), individu-ally aligned and bolted to one of two semi-circularsupport structures. The endcap is split verticallyinto two halves to facilitate access to the centraldetector components.
The entire calorimeter is surrounded by a dou-ble Faraday shield composed of two 1 mm-thickaluminum sheets so that the diodes and pream-plifiers are further shielded from external noise.This cage also serves as the environmental bar-rier, allowing the slightly hygroscopic crystals toreside in a dry, temperature controlled nitrogenatmosphere.

67
9.2.5. Cooling SystemThe EMC is maintained at constant, accurately
monitored temperature. Of particular concernare the stability of the photodiode leakage currentwhich rises exponentially with temperature, andthe large number of diode-crystal epoxy jointsthat could experience stress due to differentialthermal expansion. In addition, the light yieldof CsI(Tl) is weakly temperature dependent.
The primary heat sources internal tothe calorimeter are the preamplifiers(2 × 50 mW/crystal) and the digitizing elec-tronics (3 kW per end-flange). In the barrel, thepreamplifier heat is removed by conduction to themodule strong backs which are directly cooledby Fluorinert (polychlorotrifluoro-ethylene) [81].The digitizing electronics are housed in 80mini-crates, each in contact with the end-flangesof the cylindrical support structure. These cratesare indirectly cooled by chilled water pumpedthrough channels milled into the end-flangesclose to the inner and outer radii. A separateFluorinert system in the endcap cools both the20 mini-crates of digitizing electronics and thepreamplifiers.
9.3. ElectronicsThe EMC electronics system, shown schemat-
ically in Figure 64, is required to have negligibleimpact on the energy resolution of electromag-netic showers from 20 MeV to 9 GeV, while ac-commodating the use of a 6.13 MeV radioactivesource for calibration. These requirements set alimit of less than 250 keV equivalent noise energy(ENE) per crystal and define an 18-bit effectivedynamic range of the digitization scheme. Forsource calibrations, the least significant bit is setto 50 keV, while for colliding beam data it is setto 200 keV. To reach the required energy reso-lution at high energies, the coherent componenthas to be significantly smaller than the incoher-ent noise component. In addition, the impact ofhigh rates of low energy (<5 MeV) beam-inducedphoton background needs to be minimized.
9.3.1. Photodiode Readoutand Preamplifiers
The ENE is minimized by maximizing the lightyield and collection, employing a highly efficientphoton detector, and a low-noise electronic read-out. The PIN silicon photodiodes [82] have aquantum efficiency of 85% for the CsI(Tl) scin-tillation light [83]. At a depletion voltage of70 V, their typical dark currents were measuredto be 4 nA for an average capacitance of 85 pF;the diodes are operated at a voltage of 50 V.The input capacitance to the preamplifier is min-imized by connecting the diodes to the preampli-fier with a very short cable. The preamplifier is alow-noise charge-sensitive amplifier implementedas a custom application specific integrated cir-cuit (ASIC) [84]. It shapes the signal and actsas a band-pass filter to remove high- and low-frequency noise components. The optimum shap-ing time for the CsI(Tl)-photodiode readout is2–3µs, but a shorter time was chosen to reducethe probability of overlap with low-energy pho-tons from beam background. The commensuratedegradation in noise performance is recovered byimplementing a realtime digital signal-processingalgorithm following digitization.
To achieve the required operational reliabil-ity [85] for the inaccessible front-end readout com-ponents, two photodiodes were installed, eachconnected to a preamplifier. In addition, all com-ponents were carefully selected and subjected torigorous tests, including a 72-hour burn-in of thepreamplifiers at 70C to avoid infant mortality.The dual signals are combined in the postam-plification/digitization circuits, installed in mini-crates at the end-flanges, a location that is acces-sible for maintenance.
9.3.2. Postamplification, Digitizationand Readout
The two preamplifiers on each crystal, A and B,each provide amplification factors of 1 and 32 andthus reduce the dynamic range of the signal thatis transmitted to the mini-crates to 13-bits. Acustom auto-range encoding (CARE) circuit [84]further amplifies the signal to arrive at a totalgain of 256, 32, 4 or 1 for four energy ranges,0–50 MeV, 50–400 MeV, 0.4–3.2 GeV, and 3.2–

68
Crystal with two Diodes
on Crystal on-detector off-detector
Ax1 CARE
Chip
Rangebits ROMAmplifier
ADC
x256
x32
x4
x1 Link
Optical Fiber
10-bitselect, A,B, or ABavg
x32
x1x32
Mem
Link
Sum
Trigger Data
Event Data
B
11-2000 8572A04
Figure 64. Schematic diagram of the EMC readout electronics.
13.0 GeV, respectively. The appropriate range isidentified by a comparator and the signal is dig-itized by a 10-bit, 3.7 MHz ADC. Data from 24crystals are multiplexed onto a fiber-optic driverand sent serially at a rate of 1.5 Gbytes/s across a30 m-long optical fiber to the ROM. In the ROM,the continuous data stream is entered into a dig-ital pipeline. A correction for pedestal and gainis applied to each sample. The pipeline is thentapped to extract the input to the calorimetertrigger.
Upon receipt of the L1 Accept signal, datasamples within a time window of ±1µs are se-lected for the feature extraction. Up to now, thecalorimeter feature extraction algorithm performsa parabolic fit to the peak of the signal waveformto derive its energy and time. In the future, it isplanned to employ a digital filter prior to the sig-nal fit to further reduce noise. For this filter algo-rithm, the frequency decomposition of an averagesignal pulse and the typical noise spectrum aremeasured for all channels and subsequently usedto derive an optimum set of weights that maxi-mizes the signal-to-noise ratio. These weights arethen applied to individual samples to obtain afiltered waveform.
The magnitude of the electronic noise is mea-sured as the rms width of the pedestal distribu-tion as shown in Figure 65. The observed dis-tribution for all channels translates to an ENEof 230 keV and 440 keV with and without digitalfiltering; this result is comparable to design ex-pectations. Measurements of the auto-correlation
0
400
800
0 0.4 0.8
Filtered
Unfiltered
Electronics Noise (MeV)
Cha
nnel
s / 0
.01
(M
eV)
1-2001 8583A9
Figure 65. The distribution of equivalent noiseenergy (ENE) or all channels of the EMC withand without digital filtering. The data wererecorded in the absence of beams by a randomtrigger.
function indicate that the coherent noise com-ponent is negligible compared to the incoherentnoise, except for regions where the preamplifierssaturate (see below).
During data-taking, the data acquisition im-poses a single-crystal readout threshold in orderto keep the data volume at an acceptable level.

69
This energy threshold is currently set to 1 MeVand during stable colliding beam conditions onaverage 1,000 crystals are read out (measuredwith 600 mA of e− and 1100mA of e+ and a ran-dom clock trigger), corresponding to an averageoccupancy of 16%. The electronic noise accountsfor about 10%, while the remaining signals orig-inate from beam-generated background (see Sec-tion 3). A typical hadronic event contributes sig-nals in 150 crystals.
9.3.3. Electronics Calibrationand Linearity
To measure pedestal offsets, determine theoverall gain, and to remove non-linearities theFEE are calibrated by precision charge injectioninto the preamplifier input. Initially, residualnon-linearities of up to 12% in limited regionsnear each of the range changes were observed andcorrected for offline [86]. These non-linearitieswere traced to oscillations on the ADC cards thathave since been corrected. The correction re-sulted in markedly improved energy resolutionat high energies. Residual non-linearities (typi-cally 2–4%) arise primarily from cross-talk, im-pacting both the electronics calibrations and thecolliding-beam data. The effect is largest at about630 MeV (950 MeV) in a high (low) gain preampli-fier channel, inducing a 2 MeV (6 MeV) cross-talksignal in an adjacent channel. The implemen-tation of an energy dependent correction is ex-pected to significantly reduce this small, remain-ing effect, and lead to a further improvement ofthe energy resolution.
9.3.4. Electronics ReliabilityWith the exception of minor cable damage
during installation (leaving two channels inop-erative), the system of 13,160 readout channelshas met its reliability requirements. After thereplacement of a batch of failing optical-fiberdrivers, the reliability of the digitizing electronicsimproved substantially, averaging channel lossesof less than 0.1%.
9.4. Energy CalibrationThe energy calibration of the EMC proceeds
in two steps. First, the measured pulse height ineach crystal has to be translated to the actual en-
ergy deposited. Second, the energy deposited ina shower spreading over several adjacent crystalshas to be related to the energy of the incidentphoton or electron by correcting for energy lossmostly due to leakage at the front and the rear,and absorption in the material between and infront of the crystals, as well as shower energy notassociated with the cluster.
The offline pattern recognition algorithm thatgroups adjacent crystals into clusters is describedin detail in Section 9.6.
9.4.1. Individual Crystal CalibrationIn spite of the careful selection and tuning of
the individual crystals, their light yield varies sig-nificantly and is generally non-uniform. It alsochanges with time under the impact of beam-generated radiation. The absorbed dose is largestat the front of the crystal and results in increasedattenuation of the transmitted scintillation light.The light yield must therefore be calibrated atdifferent energies, corresponding to different av-erage shower penetration, to track the effects ofthe radiation damage.
The calibration of the deposited energies isperformed at two energies at opposite ends ofthe dynamic range, and these two measurementsare combined by a logarithmic interpolation. A6.13 MeV radioactive photon source [87] providesan absolute calibration at low energy, while athigher energies (3–9 GeV) the relation betweenpolar angle and energy of e± from Bhabha eventsis exploited [88].
A flux of low-energy neutrons (4×108/s) is usedto irradiate Fluorinert [81] to produce photons of6.13 MeV via the reaction 19F + n →16 N + α,16N →16 O∗+β, 16O∗ →16 O+γ. The activated16N has a half-life of 7 seconds and thus does notcause radiation damage or long-term activation.The fluid is pumped at a rate of 125 `/s from theneutron generator to a manifold of thin-walled(0.5 mm) aluminum pipes that are mounted im-mediately in front of the crystals. At this loca-tion, the typical rate of photons is 40 Hz/crystal.
Figure 66 shows a typical source spectrum thatwas derived from the raw data by employing adigital filter algorithm. For a 30-minute exposure,a statistical error of 0.35% is obtained, compared

70
0
100
200
4 6 8
Energy (MeV)
Eve
nts
/ 0.0
47 M
eV
Figure 66. A typical pulse-height spectrumrecorded with the radioactive source to calibratethe single-crystal energy scale of the EMC. Thespectrum shows the primary 6.13 MeV peak andtwo associated escape peaks at 5.62 MeV and5.11 MeV. The solid line represents a fit to thetotal spectrum, the dotted lines indicate the con-tributions from the three individual photon spec-tra.
to a systematic uncertainty of less than 0.1%.This calibration is performed weekly.
At high energies, single crystal calibrationis performed with a pure sample of Bhabhaevents [88]. As a function of the polar angle of thee±, the deposited cluster energy is constrained toequal the prediction of a GEANT-based MonteCarlo simulation [89]. For a large number of en-ergy clusters, a set of simultaneous linear equa-tions relates the measured to the expected energyand thus permits the determination of a gain con-stant for each crystal. In a 12-hour run at a lu-minosity of 3 × 1033 cm−2s−1 some 200 e± percrystal can be accumulated, leading to a statisti-cal error of 0.35%. This calibration has been per-formed about once per month, and will be fullyautomated in the future.
9.4.2. Cluster Energy CorrectionThe correction for energy loss due to shower
leakage and absorption is performed as a functionof cluster energy and polar angle. At low energy(E < 0.8 GeV), it is derived from π0 decays [90].The true energy of the photon is expressed as aproduct of the measured deposited energy and acorrection function which depends on lnE andcos θ. The algorithm constrains the two-photonmass to the nominal π0 mass and iteratively findsthe coefficients of the correction function. Thetypical corrections are of order 6± 1%. The un-certainty in the correction is due to systematicuncertainties in the background estimation andthe fitting technique.
At higher energy (0.8 < E < 9 GeV) the correc-tion is estimated from single-photon Monte Carlosimulations. A second technique using radiativeBhabha events [91] is being developed. The beamenergy and the precise track momenta of the e+
and e−, together with the direction of the radia-tive photon, are used to fit the photon energy.This fitted value is compared to the measuredphoton energy to extract correction coefficients,again as a function of lnE and cos θ.
9.5. Monitoring9.5.1. Environmental Monitoring
The temperature is monitored by 256 thermalsensors that are distributed over the calorimeter,and has been maintained at 20 ± 0.5C. Dry ni-trogen is circulated throughout the detector tostabilize the relative humidity at 1± 0.5%.
9.5.2. Light-Pulser SystemThe light response of the individual crystals is
measured daily using a light-pulser system [92,93]. Spectrally filtered light from a xenon flashlamp is transmitted through optical fibers to therear of each crystal. The light pulse is similar inspectrum, rise-time and shape to the scintillationlight in the CsI(Tl) crystals. The pulses are var-ied in intensity by neutral-density filters, allowinga precise measurement of the linearity of light col-lection, conversion to charge, amplification, anddigitization. The intensity is monitored pulse-to-pulse by comparison to a reference system withtwo radioactive sources, 241Am and 148Gd, that

71
Integrated Luminosity (fb-1)
Dos
e (
Rad
)
–8
–4
0 10 20
Gai
n C
hang
e (
%)
Backward Barrel
Forward Barrel
Endcap
1-20018583A10
0
40
80
120
160
200
Forward Barrel
Backward Barrel
Endcap
Figure 67. Impact of beam-generated radiationon the CsI(Tl) crystals: a) the integrated dosemeasured with RadFETs placed in front of thecrystals, b) the degradation in light yield mea-sured with the radioactive-source calibration sys-tem.
are attached to a small CsI(Tl) crystal that isread out by both a photodiode and a photomul-tiplier tube. The system is stable to 0.15% overa period of one week and has proven to be veryvaluable in diagnosing problems. For example,the ability to accurately vary the light intensityled to the detection of non-linear response in theelectronics [92].
9.5.3. Radiation Monitoring and DamageThe radiation exposure is monitored by 56
and 60 realtime integrating dosimeters (Rad-FETs) [18] placed in front of the barrel and end-cap crystals. In Figure 67, the accumulated doseis compared to the observed loss in scintillationlight, separately for the endcap, the forward, andthe backward barrel. The dose appears to followthe integrated luminosity, approximately linearly.The light loss is greatest in the forward regioncorresponding to the area of highest integratedradiation dose. The size of the observed light lossis close to expectations, based on extensive irra-diation tests.
9.6. Reconstruction AlgorithmsA typical electromagnetic shower spreads over
many adjacent crystals, forming a cluster of en-ergy deposits. Pattern recognition algorithmshave been developed to efficiently identify theseclusters and to differentiate single clusters withone energy maximum from merged clusters withmore than one local energy maximum, referred toas a bumps. Furthermore, the algorithms deter-mine whether a bump is generated by a chargedor a neutral particle.
Clusters are required to contain at least oneseed crystal with an energy above 10 MeV. Sur-rounding crystals are considered as part of thecluster if their energy exceeds a threshold of1 MeV, or if they are contiguous neighbors (in-cluding corners) of a crystal with at least 3 MeV.The value of the single crystal threshold is set bythe data acquisition system in order to keep thedata volume at an acceptable level, given the cur-rent level of electronics noise and beam-generatedbackground. It is highly desirable to reduce thisthreshold since fluctuations in the effective energyloss at the edges of a shower cause a degradationin resolution, particularly at low energies.
Local energy maxima are identified within acluster by requiring that the candidate crys-tal have an energy, ELocalMax, which exceedsthe energy of each of its neighbors, and sat-isfy the following condition: 0.5(N − 2.5) >ENMax/ELocalMax, where ENMax is the highest en-ergy of any of the neighboring N crystals with anenergy above 2 MeV.

72
Clusters are divided into as many bumps asthere are local maxima. An iterative algorithmis used to determine the energy of the bumps.Each crystal is given a weight, wi, and the bumpenergy is defined as Ebump =
∑i wiEi, where the
sum runs over all crystals in the cluster. For acluster with a single bump, the result is wi ≡ 1.For a cluster with multiple bumps, the crystalweight for each bump is calculated as
wi = Eiexp(−2.5ri/rM )∑j Ej exp(−2.5rj/rM)
, (8)
where the index j runs over all crystals in thecluster. rM refers to the Moliere radius, and riis the distance of the ith crystal from the cen-troid of the bump. At the outset, all weights areset to one. The process is then iterated, wherebythe centroid position used in calculating ri is de-termined from the weights of the previous itera-tion, until the bump centroid position is stable towithin a tolerance of 1 mm.
The position of a bump is calculated us-ing a center-of-gravity method with logarithmic,rather than linear weights [94,95], Wi = 4.0 +lnEi/Ebump, where only crystals with positiveweights, i.e.,Ei > 0.0184×Ebump, are used in thecalculation. This procedure emphasizes lower-energy crystals, while utilizing only those crystalsthat make up the core of the cluster. A system-atic bias of the calculated polar angle originatesfrom the non-projectivity of the crystals. Thisbias is corrected by a simple offset of −2.6 mradfor θ > 90 and +2.6 mrad for θ < 90.
A bump is associated with a charged particleby projecting a track to the inner face of thecalorimeter. The distance between the track im-pact point and the bump centroid is calculated,and if it is consistent with the angle and momen-tum of the track, the bump is associated withthis charged particle. Otherwise, it is assumed tooriginate from a neutral particle.
On average, 15.8 clusters are detected perhadronic event, of which 10.2 are not associatedwith charged particle tracks. At current oper-ating conditions, beam-induced background con-tributes on average 1.4 neutral clusters with en-ergies above 20 MeV. This number is significantlysmaller than the average number of crystals with
EMeasured/EExpected
0.6 0.8 1.0
Ent
ries/
0.00
7
0
100
200
300
400
500
1-2001 8583A32
Figure 68. The ratio of the EMC measured en-ergy to the expected energy for electrons fromBhabha scattering of 7.5 GeV/c. The solid lineindicates a fit using a logarithmic function.
γγ→0πBhabhas
c
MonteCarloγψ J/→χ
3-20018583A41 Photon Energy (GeV)
10–1 1.0 10.0
σE /
E
0.02
0.02
0.04
0.06
Figure 69. The energy resolution for the ECMmeasured for photons and electrons from variousprocesses. The solid curve is a fit to Equation 6and the shaded area denotes the rms error of thefit.
energies above 10 MeV (see Section 3).
9.7. Performance9.7.1. Energy Resolution
At low energy, the energy resolution of theEMC is measured directly with the radioactive

73
3-2001 8583A42 Photon Energy (GeV)
0 1 2 3
σ θ (
mra
d)
0
4
8
12γγ → 0π
MonteCarlo
Figure 70. The angular resolution of the EMCfor photons from π0 decays. The solid curve is afit to Equation 7.
source yielding σE/E = 5.0 ± 0.8% at 6.13 MeV(see Figure 66). At high energy, the resolution isderived from Bhabha scattering, where the energyof the detected shower can be predicted from thepolar angle of the e±. The measured resolution isσE/E = 1.9± 0.07% at 7.5 GeV (see Figure 68).Figure 69 shows the energy resolution extractedfrom a variety of processes as a function of en-ergy. Below 2 GeV, the mass resolution of π0 andη mesons decaying into two photons of approx-imately equal energy is used to infer the EMCenergy resolution [90]. The decay χc1 → J/ψ γprovides a measurement at an average energy ofabout 500 MeV, and measurements at high energyare derived from Bhabha scattering. A fit to theenergy dependence results in
σEE
=(2.32± 0.30)%
4√E( GeV)
⊕ (1.85± 0.12)%. (9)
Values of these fitted parameters are higher thanthe somewhat optimistic design expectations, butthey agree with detailed Monte Carlo simulationswhich include the contributions from electronicnoise and beam background, as well as the impactof the material and the energy thresholds.
9.7.2. Angular ResolutionThe measurement of the angular resolution is
based on the analysis of π0 and η decays to two
(GeV)γγm0.05 0.1 0.15 0.2 0.25
Ent
ries
/ 0.
001
GeV
0
2000
4000
6000
8000
10000
12000
Figure 71. Invariant mass of two photons in BBevents. The energies of the photons and the π0
are required to exceed 30 MeV and 300 MeV, re-spectively. The solid line is a fit to the data.
photons of approximately equal energy. The re-sult is presented in Figure 70. The resolutionvaries between about 12 mrad at low energies and3 mrad at high energies. A fit to an empirical pa-rameterization of the energy dependence resultsin
σθ = σφ
= (3.87± 0.07√E( GeV)
+ 0.00± 0.04) mrad. (10)
These fitted values are slightly better than wouldbe expected from detailed Monte Carlo simula-tions.
9.7.3. π0 Mass and WidthFigure 71 shows the two-photon invariant mass
in BB events. The reconstructed π0 mass is mea-sured to be 135.1 MeV/c2 and is stable to betterthan 1% over the full photon energy range. Thewidth of 6.9 MeV/c2 agrees well with the predic-tion obtained from detailed Monte-Carlo simula-tions. In low-occupancy τ+τ− events, the widthis slightly smaller, 6.5 MeV/c2, for π0 energies be-low 1 GeV. A similar improvement is also ob-served in analyses using selected isolated photonsin hadronic events.

74
9.7.4. Electron IdentificationElectrons are separated from charged hadrons
primarily on the basis of the shower energy, lat-eral shower moments, and track momentum. Inaddition, the dE/dx energy loss in the DCH andthe DIRC Cherenkov angle are required to beconsistent with an electron. The most impor-tant variable for the discrimination of hadronsis the ratio of the shower energy to the trackmomentum (E/p). Figure 72 shows the effi-ciency for electron identification and the pion mis-identification probability as a function of momen-tum for two sets of selection criteria. The elec-tron efficiency is measured using radiative Bhab-has and e+e− → e+e−e+e− events. The pionmisidentification probability is measured for se-lected charged pions from K0
S decays and three-prong τ decays. A tight (very tight) selector re-sults in an efficiency plateau at 94.8% (88.1%)in the momentum range 0.5 < p < 2 GeV/c. Thepion misidentification probability is of order 0.3%(0.15%) for the tight (very tight) selection crite-ria.
9.8. SummaryThe EMC is presently performing close to de-
sign expectations. Improvements in the energyresolution are expected from the optimization ofthe feature-extraction algorithms designed to fur-ther reduce the electronics noise. Modifications tothe electronics should allow for more precise cal-ibrations. The expected noise reduction shouldpermit a lower single-crystal readout threshold.However, this decrease in noise might be offsetby an increase in the beam background that isexpected for higher luminosities and beam cur-rents.
10. Detector for Muons and NeutralHadrons
10.1. Physics Requirements and GoalsThe Instrumented Flux Return (IFR) was de-
signed to identify muons with high efficiency andgood purity, and to detect neutral hadrons (pri-marily K0
Land neutrons) over a wide range of
momenta and angles. Muons are important fortagging the flavor of neutral B mesons via semi-
40 80 120
± e
± π
0.00.000
0.002
0.004
0.006
0.008
0.010
0.000
0.002
0.004
0.006
0.008
0.010
Effi
cien
cy
0.0
0.2
0.4
0.6
0.8
1.0
Effi
cien
cy
0.0
0.2
0.4
0.6
0.8
1.0
± e
± π
0 1 2Momentum (GeV/c)
Polar Angle (degrees)3-2001 8583A43
a)
b)
Figure 72. The electron efficiency and pion mis-identification probability as a function of a) theparticle momentum and b) the polar angle, mea-sured in the laboratory system.
leptonic decays, for the reconstruction of vectormesons, like the J/ψ , and for the study of semi-leptonic and rare decays involving leptons of Band D mesons and τ leptons. K0
Ldetection al-
lows the study of exclusive B decays, in particularCP eigenstates. The IFR can also help in vetoingcharm decays and improve the reconstruction ofneutrinos.
The principal requirements for IFR are largesolid angle coverage, good efficiency, and high

75
background rejection for muons down to mo-menta below 1 GeV/c. For neutral hadrons, highefficiency and good angular resolution are mostimportant. Because this system is very large anddifficult to access, high reliability and extensivemonitoring of the detector performance and theassociated electronics plus the voltage distribu-tion are required.
10.2. Overview and RPC ConceptThe IFR uses the steel flux return of the mag-
net as a muon filter and hadron absorber. Sin-gle gap resistive plate chambers (RPCs) [96] withtwo-coordinate readout have been chosen as de-tectors.
The RPCs are installed in the gaps of the finelysegmented steel (see Section 4) of the barrel andthe end doors of the flux return, as illustrated inFigure 73. The steel segmentation has been cho-sen on the basis of Monte Carlo studies of muonpenetration and charged and neutral hadron in-teractions. The steel is segmented into 18 plates,increasing in thickness from 2 cm for the innernine plates to 10 cm for the outermost plates. Thenominal gap between the steel plates is 3.5 cmin the inner layers of the barrel and 3.2 cm else-where. There are 19 RPC layers in the barreland 18 in the endcaps. In addition, two layers ofcylindrical RPCs are installed between the EMCand the magnet cryostat to detect particles exit-ing the EMC.
RPCs detect streamers from ionizing particlesvia capacitive readout strips. They offer severaladvantages: simple, low cost construction and thepossibility of covering odd shapes with minimaldead space. Further benefits are large signals andfast response allowing for simple and robust front-end electronics and good time resolution, typi-cally 1–2 ns. The position resolution depends onthe segmentation of the readout; a value of a fewmm is achievable.
The construction of the planar and cylindricalRPCs differ in detail, but they are based on thesame concept. A cross section of an RPC is shownschematically in Figure 74.
The planar RPCs consist of two bakelite (phe-nolic polymer) sheets, 2 mm-thick and separatedby a gap of 2 mm. The gap is enclosed at the
AluminumX StripsInsulator
2 mm
GraphiteInsulator
SpacersY Strips
Aluminum
H.V
.
Foam
Bakelite
BakeliteGas
Foam
Graphite
2 mm2 mm
8-2000 8564A4
Figure 74. Cross section of a planar RPC with theschematics of the high voltage (HV) connection.
edge by a 7 mm wide frame. The gap width iskept uniform by polycarbonate spacers (0.8 cm2)that are glued to the bakelite, spaced at dis-tances of about 10 cm. The bulk resistivity ofthe bakelite sheets has been especially tuned to1011–1012Ω cm. The external surfaces are coatedwith graphite to achieve a surface resistivity of ∼100 kΩ/square. These two graphite surfaces areconnected to high voltage (∼ 8 kV) and ground,and protected by an insulating mylar film. Thebakelite surfaces facing the gap are treated withlinseed oil. The RPCs are operated in limitedstreamer mode and the signals are read out ca-pacitively, on both sides of the gap, by externalelectrodes made of aluminum strips on a mylarsubstrate.
The cylindrical RPCs have resistive electrodesmade of a special plastic composed of a conduct-ing polymer and ABS plastic. The gap thicknessand the spacers are identical to the planar RPCs.No linseed oil or any other surface treatmentshave been applied. The very thin and flexibleelectrodes are laminated to fiberglass boards andfoam to form a rigid structure. The copper read-out strips are attached to the fiberglass boards.
10.3. RPC Design and ConstructionThe IFR detectors cover a total active area of
about 2,000 m2. There are a total of 806 RPCmodules, 57 in each of the six barrel sectors, 108in each of the four half end doors, and 32 in thetwo cylindrical layers. The size and the shape of

76
Figure 73. Overview of the IFR: Barrel sectors and forward (FW) and backward (BW) end doors; theshape of the RPC modules and their dimensions are indicated.
the modules are matched to the steel dimensionswith very little dead space. More than 25 differ-ent shapes and sizes were built. Because the sizeof a module is limited by the maximum size ofthe material available, i.e., 320×130 cm2 for thebakelite sheets, two or three RPC modules arejoined to form a gap-size chamber. The modulesof each chamber are connected to the gas systemin series, while the high voltage is supplied sepa-rately to each module.
In the barrel sectors, the gaps between the steelplates extend 375 cm in the z direction and varyin width from 180 cm to 320 cm. Three modulesare needed to cover the whole area of the gap, asshown in Figure 73. Each barrel module has 32strips running perpendicular to the beam axis tomeasure the z coordinate and 96 strips in the or-thogonal direction extending over three modulesto measure φ.
Each of the four half end doors is divided intothree sections by steel spacers that are neededfor mechanical strength. Each of these sections iscovered by two RPC modules that are joined toform a larger chamber with horizontal and verti-
cal readout strips.The readout strips are separated from the
ground aluminum plane by a 4 mm-thick foamsheet and form strip lines of 33Ω impedance. Thestrips are connected to the readout electronics atone end and terminated with a 2 kΩ resistor atthe other. Even and odd numbered strips areconnected to different front-end cards (FECs), sothat a failure of a card does not result in a to-tal loss of signal, since a particle crossing the gaptypically generates signals in two or more adja-cent strips.
The cylindrical RPC is divided into four sec-tions, each covering a quarter of the circumfer-ence. Each of these sections has four sets of twosingle gap RPCs with orthogonal readout strips,the inner with helical u–v strips that run paral-lel to the diagonals of the module, and the outerwith strips parallel to φ and z. Within each sec-tion, the strips of the four sets of RPCs in a givenreadout plane are connected to form long stripsextending over the whole chamber. Details of thesegmentation and dimensions can be found in Ta-ble 13.

77
Table 13IFR Readout segmentation. The total number of channels is close to 53,000.
# of # of readout # strips strip length strip width total #section sectors coordinate layers layer/sect (cm) (mm) channels
barrel 6 φ 19 96 350 19.7-32.8 ≈ 11, 000z 19 96 190-318 38.5 ≈ 11, 000
endcap 4 y 18 6x32 124-262 28.3 13,824x 18 3x64 10-180 38.0 ≈ 15, 000
cylinder 4 φ 1 128 370 16.0 512z 1 128 211 29.0 512u 1 128 10-422 29.0 512v 1 128 10-423 29.0 512
Prior to shipment to SLAC, all RPC moduleswere tested with cosmic rays. The single rates,dark currents, and efficiency were measured as afunction of HV. In addition, detailed studies ofthe efficiency, spatial resolution, and strip multi-plicity were performed [97,98].
After the assembly of RPC modules into gap-size chambers, a new series of cosmic rays testswas performed to assure stable and efficient oper-ation. Before the installation of the steel flux re-turn, the planar chambers were inserted into thegaps. The cylindrical chambers were inserted af-ter the installation of the solenoid and the EMC.
For each module, test results and conditionsare retained in a database, together with recordsof the critical parameters of the components, theassembly and cabling. In addition, operationaldata are stored, such as the results of the weeklyefficiency measurements that are used in the re-construction and simulation software.
10.4. Power and UtilitiesOnce the return flux assembly was completed,
the FECs [99] were installed and the low (LV)and high voltage (HV), and the gas system wereconnected. There are approximately 3,300 FECs,most placed inside the steel gaps, while the re-mainder was installed in custom crates mountedon the outside of the steel.
Each FEC is individually connected to the LVpower distribution. The total power required bythe entire system is about 8 kW at +7.0 V and2.5 kW at -5.2 V. The LV power is supplied by
custom-built switching devices with load and lineregulation of better than 1%. Additional featuresare precision shunts to measure output currentsand TTL logic to inhibit output.
The HV power system is a custom adaptationby CAEN [100]. Each HV mainframe can holdup to ten cards, each carrying two independent10 kV outputs at 1 mA and 2 mA. The RPC mod-ules are connected via a distribution box to theHV supplies. Each distribution box services sixRPC modules and up to six distribution boxes aredaisy-chained to one HV output. Provisions aremade for monitoring the currents drawn by eachmodule. To reduce noise, the RPC ground planeis decoupled from the HV power supply groundby a 100 kΩ resistor.
The RPCs operate with a non-flammable gasmixture, typically 56.7% Argon, 38.8% Freon134a (1,1,1,2 tetrafluoroethane), and 4.5% isobu-tane. This mixture is drawn from a 760 litertank that is maintained at an absolute pressure of1500–1600 Torr. The mixing tank is filled on de-mand with the three component gases under con-trol of mass-flow meters. Samples are extractedfrom the mixing tank periodically and analyzedto verify the correct mixture.
The mixed gas is distributed at a gauge pres-sure of approximately 6.5 Torr through a parallelmanifold system of 12.7 mm-diameter copper tub-ing. Each chamber is connected to the manifoldthrough several meters of 6 mm-diameter plastictubing (polyamide or Teflon). The flow to each of

78
ITBITBIFB
ITBITBICB
ITBITBITB
FEC
DAQ
ROM
ICC
PDB
TDC
Inside the IFR Iron
or in Minicrates (1 - 4 m)
Outside the Detector (1 - 8 m)
Counting House
Readout Module
Calibration Board
Front End Crate
Front End Cards
Discrimination and Noise Reduction
Fast Buffering on Trigger Basis
Zero Suppression and Encoding
IFR Crate Controller
FIFO BoardData
Clock
Data
8-2000 8564A3
Figure 75. Block diagram of the IFR electronics.
these is adjusted individually with a small multi-turn metering valve. Protection against overpres-sure is provided by an oil bubbler to atmospherein parallel with each chamber, limiting the gaugepressure in the chamber to a maximum of about1 Torr. Return flow of gas from each chamberis monitored by a second oil bubbler which cre-ates a back pressure of about 0.2 Torr. The totalflow through the entire system is approximately5 `/minute and corresponds on average to two gasexchanges per day.
10.5. ElectronicsA block diagram of the IFR electronics system
[101] is shown in Figure 75. It includes the FECs,the data acquisition, and the trigger.
The FECs service 16 channels each. Theyshape and discriminate the input signals and seta bit for each strip with a signal above a fixedthreshold. The input stage operates continuouslyand is connected directly to the strips which actas transmission lines. A fast OR of all FEC in-put signals provides time information and is alsoused for diagnostic purposes. Two types of FECsare employed to handle inputs of different polar-ity for signals from the opposite sides of the gap.Because of the very low occupancy there is noprovision for buffering during the trigger latency[99].
Signals from 3,300 FECs are transmitted toeight custom IFR front-end crates that are lo-cated near the detector. Each front-end cratehouses up to 16 data handling cards, four triggercards and a crate controller card (ICC) that col-lects data from the DAQ cards and forwards themto a ROM. There are three kinds of data cards:the FIFO boards (IFBs) that buffer strip hits, theTDC boards (ITBs) that provide time informa-tion, and the calibration boards (ICBs) that in-ject test pulses into the FECs. To deliver the dataand clock signals to all the boards in the front-endcrate, a custom backplane (PDB) for the standard6U Eurocard crate was designed using 9-layerstrip line technology. Each board is connectedto the ICC via three point-to-point lines for threesingle-end signals (data-in, data-out and clock),all of the same length and impedance (50Ω).
The IFB reads the digital hit patterns from theFECs in less than 2.2 ms, stores the data into FI-FOs and transfers the FIFO contents into one ofthe ROMs. Each IFB handles 64 FECs, acting asan acquisition master. It receives commands viathe PDB, and transmits and receives data pat-terns from the ROM (via G-Link and ICC). Thiscard operates with the system clock frequency of59.5 MHz.
The ICB is used for front-end tests and cali-brations. A signal with programmable amplitudeand width is injected into the FEC input stage.To provide timing calibration and to determinethe correct readout delay, the board is also usedtogether with the TDCs.
The ICC interfaces the crate backplane withthe G-Link. The physical interface is the Finisartransceiver, a low cost and highly reliable datalink for applications up to 1.5 Gbytes/s.
The TDC boards exploit the excellent time res-olution of the RPCs. Each board has 96 ECLdifferential input channels for the fast OR sig-nals from the FECs. Time digitization is achievedby three custom TDCs, designed at CERN [102].Upon receipt of a L1 Accept, data are selected andstored until readout by the ROM. The 59.5MHzclock signal is synchronized with the data anddistributed to the 16 boards. High performancedrivers provide a reliable clock distribution witha jitter of less than 0.5 ns.

79
10.6. Slow Controlsand Online Monitoring
The IFR is a system with a large number ofcomponents and electronics distributed all overthe BABAR detector. To assure safe and stableoperation, an extensive monitoring and controlsystem was installed. The IFR Online DetectorControl (IODC) monitors the performance of theRPCs by measuring the singles counting rate andthe dark current of every module. It also controlsand monitors the operation of the electronics, theDAQ and trigger, as well as the LV, the HV, andthe gas system. The total number of hardwarechannels is close to 2,500 [103].
The system has been easy to operate. HV tripsare rare. Temperature monitoring in the steelstructure and the electronics crates has provenvery useful for the diagnosis of operational prob-lems. The occupancy is extremely low every-where, except in layer 18 of the forward end doorwhich lacks adequate shielding from machine-generated background. On average, there areabout 100–150 strip signals per event.
10.7. Efficiency Measurementsand Performance
The efficiency of the RPCs is evaluated both fornormal collision data and for cosmic ray muonsrecorded with the IFR trigger. Every week, cos-mic ray data are recorded at different voltage set-tings and the efficiency is measured chamber-by-chamber as a function of the applied voltage. Theabsolute efficiency at the nominal working voltage(typically 7.6 kV) is stored in the database for usein the event reconstruction software.
To calculate the efficiency in a given chamber,nearby hits in a given layer and hits in differentlayers are combined to form clusters. Two differ-ent algorithms are used. The first is based solelyon the IFR information and uses data recordedwith a dedicated IFT trigger; the second matchesthe IFR clusters with the tracks reconstructed inthe DCH. Both these algorithms start from one-dimensional IFR clusters defined as a group of ad-jacent hits in one of the two readout coordinates.The cluster position is defined as the centroid ofthe strips in the cluster. In the first algorithm,two-dimensional clusters are formed by joining
0.00
400
0.5 1.0Efficiency
200
# of
Mod
ules
1-2001 8583A4
Figure 76. Distribution of the efficiency for allRPC modules measured with cosmic rays in June1999. Some 50 modules were not operational atthat time.
one-dimensional clusters (of the same readoutcoordinate) in different layers. In each sector,two-dimensional clusters in different coordinatesare combined into three-dimensional clusters pro-vided there are fewer than three layers missing inone of the two coordinates. The second algorithmextrapolates charged tracks reconstructed by theDCH. IFR clusters which are less than 12 cmfrom the extrapolated track are combined to formthree-dimensional or two-dimensional clusters. Adetailed discussion of the clustering algorithm canbe found elsewhere [104].
The residual distributions from straight line fitsto two-dimensional clusters typically have an rmswidth of less than 1 cm. An RPC is consideredefficient if a signal is detected at a distance of lessthan 10 cm from the fitted straight line in eitherof the two readout planes. Following the instal-lation and commissioning of the IFR system, allRPC modules were tested with cosmic rays andtheir efficiency was measured. The results arepresented in Figure 76. Of the active RPC mod-ules, 75% exceed an efficiency of 90%.
Early tests indicated that the RPC dark cur-rent was very temperature dependent, specifi-cally, the current increases 14–20% per C. Be-cause the IR experimental hall does not have tem-perature regulation this presents a serious prob-lem. The FECs that are installed in the steelgaps dissipate 3 W each, generating a total powerof 3.3 kW in the barrel and 1.3 kW in the forwardend door.

80
Cur
rent
( µ
A )
2000
10000
500 100 150 2008-2000 8564A1
32
16
24Te
mp.
( °
C ) Hall
IFR
Day of Year 2000
a)
b)
Figure 77. History of the temperature and darkcurrent in the RPC modules since January 2000.a) temperature in the IR-2 hall and in the back-ward end door; b) total dark current in the 216modules of the backward end door.
During the first summer of operation, the dailyaverage temperature in the IR hall was 28Cand the maximum hall temperature frequentlyexceeded 31C. The temperature inside the steelrose to more than 37C and the dark currentsin many modules exceeded the capabilities of theHV system and some RPCs had to be temporarilydisconnected.
To overcome this problem, water cooling wasinstalled on the barrel and end door steel, remov-ing ≈10 kW of heat and stabilizing the tempera-ture at 20–21C in the barrel, 22C in the back-ward and 24C in the forward end doors. Fig-ure 77 shows the history of temperature in thehall and temperature and total dark current inthe backward end door. While the current closelyfollows the temperature variations, the range ofchange is now limited to a few degrees.
During operation at high temperatures, a largefraction of the RPCs (>50%) showed not onlyvery high dark currents, but also some reduc-tion in efficiency compared to earlier measure-ments [105]. After the cooling was installed andthe RPCs were reconnected, some of them contin-ued to deteriorate while others remained stable,some of them (> 30%) at full efficiency. (see Fig-ure 78). Detailed studies revealed large regions of
1.0
0.5
01.0
0.5
01.0
0.5
0
Jun
Aug Oct
Dec
Feb Apr
Jun
12-2000 8577A8
a)
b)
c)
Figure 78. Efficiency history for 12 months start-ing in June 1999 for RPC modules showing dif-ferent performance: a) highly efficient and stable;b) continuous slow decrease in efficiency; c) morerecent, faster decrease in efficiency.
very low efficiency in these modules, but no clearpattern was identified.
The cause of the efficiency loss remains underinvestigation. Several possible causes have beenexcluded as the primary source of the problem,such as a change in the bakelite bulk resistivity,loosened spacers, gas flow, or gas composition.A number of prototype RPCs developed similarefficiency problems after being operated above atemperature 36C for a period of two weeks. Insome of these modules, evidence was found thatthe linseed oil had failed to cure and had accumu-lated at various spots under the influence of theelectric field.
10.8. Muon IdentificationWhile muon identification relies almost entirely
on the IFR, other detector systems provide com-plementary information. Charged particles arereconstructed in the SVT and DCH and muoncandidates are required to meet the criteria forminimum ionizing particles in the EMC. Chargedtracks that are reconstructed in the tracking sys-tems are extrapolated to the IFR taking into ac-count the non-uniform magnetic field, multiple

81
scattering, and the average energy loss. The pro-jected intersections with the RPC planes are com-puted and for each readout plane all clusters de-tected within a predefined distance from the pre-dicted intersection are associated with the track.
A number of variables are defined for each IFRcluster associated with a charged track to discrim-inate muons from charged hadrons: 1) the to-tal number of interaction lengths traversed fromthe IP to the last RPC layer with an associatedcluster, 2) the difference between this measurednumber of interaction lengths and the number ofinteraction lengths predicted for a muon of thesame momentum and angle, 3) the average num-ber and the rms of the distribution of RPC stripsper layer, 4) the χ2 for the geometric match be-tween the projected track and the centroids ofclusters in different RPC layers, and 5) the χ2 ofa polynomial fit to the two-dimensional IFR clus-ters. Selection criteria based on these variablesare applied to identify muons.
The performance of muon identification hasbeen tested on samples of muons from µµee andµµγ final states and pions from three-prong τ de-cays and KS → π+π− decays. The selection ofthese control samples is based on kinematic vari-ables, and not on variables used for muon identifi-cation. As illustrated in Figure 79, a muon detec-tion efficiency of close to 90% has been achievedin the momentum range of 1.5 < p < 3.0 GeV/cwith a fake rate for pions of about 6–8%. Decaysin flight contribute about 2% to the pion misiden-tification probability. The hadron misidentifica-tion can be reduced by a factor of about two bytighter selection criteria which lower the muondetection efficiency to about 80%.
10.9. K0L and Neutral Hadron Detection
K0L’s and other neutral hadrons interact in the
steel of the IFR and can be identified as clus-ters that are not associated with a charged track.Monte Carlo simulations predict that about 64%of KL’s above a momentum of 1 GeV/c produce acluster in the cylindrical RPC, or a cluster withhits in two or more planar RPC layers.
Unassociated clusters that have an angular sep-aration of ≤ 0.3 rad are combined into a com-posite cluster, joining clusters that originate from
Momentum (GeV/c)
Effi
cien
cyE
ffici
ency
0.0
0.2
0.4
0.6
0.8
1.0
0 1 2 30.0
0.1
0.2
0.3
0.4
0.5
0.0
0.1
0.2
0.3
0.4
0.5
3-2001 8583A44
a)
b)
Polar Angle (degrees)
0.0
0.2
0.4
0.6
0.8
1.0
0 40 80 120 160
Figure 79. Muon efficiency (left scale) and pionmisidentification probability (right scale) as afunction of a) the laboratory track momentum,and b) the polar angle (for 1.5 < p < 3.0 GeV/cmomentum), obtained with loose selection crite-ria.
showers that spread into adjacent sectors of thebarrel, several sections of the end doors and/orthe cylindrical RPC. This procedure also com-bines multiple clusters from large fluctuations inthe hadronic showers. The direction of the neu-tral hadron is determined from the event vertexand the centroid of the neutral cluster. No infor-mation on the energy of the cluster can be ob-tained.

82
3-2001 8583A45 cos ∆ξ
Eve
nts
0
40
80
0.96 0.98 1.00
Figure 80. Angular difference, cos ∆ξ, betweenthe direction of the missing momentum and theclosest neutral IFR cluster for a sample of φmesons produced in the reaction e+e− → φγ withφ→ K0
LK0S .
Since a significant fraction of hadrons interactbefore reaching the IFR, information from theEMC and the cylindrical RPCs is combined withthe IFR cluster information. Neutral showers inthe EMC are associated with the neutral hadronsdetected in the IFR, based on a match in produc-tion angles. For a good match, a χ2 probabilityof ≥ 1% is required.
An estimate of the angular resolution of theneutral hadron cluster can be derived from a sam-ple of K0
L’s produced in the reaction e+e− →φγ → K0
LK0Sγ. The K0
L direction is inferred fromthe missing momentum computed from the mea-sured particles in the final state. The data inFigure 80 indicate that the angular resolution ofthe K0
L derived from the IFR cluster informationis of the order of 60 mrad. For K0
L’s interactingin the EMC, the resolution is better by about afactor of two.
For multi-hadron events with a reconstructedJ/ψ decay, Figure 81 shows the angular differ-ence, ∆φ, between the missing momentum andthe direction of the nearest neutral hadron clus-ter. The observed peak demonstrates clearly thatthe missing momentum can be associated with aneutral hadron, assumed to be a K0
L. The K0L de-
tection efficiency increases roughly linearly withmomentum; it varies between 20% and 40% in the
∆φ (Degrees)
MCDataBackground
0
40
80
120
160
-100 0 1001-2001 8583A6
Neu
tral
Clu
ster
s
Figure 81. Difference between the direction ofthe reconstructed neutral hadron cluster and themissing transverse momentum in events with areconstructed J/ψ decay. The Monte Carlo simu-lation is normalized to the luminosity of the data;the background is obtained using neutral hadronsand the missing momentum from different events.
momentum range from 1 GeV/c to 4 GeV/c (EMCand IFR combined).
10.10. Summary and OutlookThe IFR is the largest RPC system built to
date. It provides efficient muon identification andallows for the detection of K0
L’s interacting in the
steel and the calorimeter. During the first year ofoperation, a large fraction of the RPC moduleshave suffered significant losses in efficiency. Thiseffect appears to be correlated with high temper-atures, but the full extent of the problem and itscause remain under study. Thanks to the largenumber of RPC layers, this problem has not yetimpacted the overall performance severely. Butpresent extrapolations, even after installation ofwater cooling on the steel, indicate a severe prob-lem for the future operation. Recently, 24 enddoor modules have been replaced by new RPCswith a substantially thinner coating of linseed oiland improved treatment of the bakelite surfaces.Results with these new RPCs and other tests willneed to be evaluated before decisions on futureimprovements of the IFR can be made. Further-

83
more, it is planned to reduce the contaminationfrom hadron decays and punch through by in-creasing the absorber thickness, i.e., adding moresteel on the outside and replacing a few of theRPCs with absorber plates.
11. Trigger
11.1. Trigger RequirementsThe basic requirement for the trigger system is
the selection of events of interest (see Table 14)with a high, stable, and well-understood efficiencywhile rejecting background events and keepingthe total event rate under 120 Hz. At design lumi-nosity, beam-induced background rates are typi-cally about 20 kHz each for one or more tracksin the drift chamber with pt > 120 MeV/c or atleast one EMC cluster with E > 100 MeV. Ef-ficiency, diagnostic, and background studies re-quire prescaled samples of special event types,such as those failing the trigger selection criteria,and random beam crossings.
The total trigger efficiency is required to exceed99% for allBB events and at least 95% for contin-uum events. Less stringent requirements apply toother event types, e.g., τ+τ− events should havea 90-95% trigger efficiency, depending on the spe-cific τ± decay channels.
The trigger system must be robust and flexiblein order to function even under extreme back-ground situations. It must also be able to operatein an environment with dead or noisy electronicschannels. The trigger should contribute no morethan 1% to dead time.
11.2. Trigger OverviewThe trigger is implemented as a two-level hier-
archy, the Level 1 (L1) in hardware followed bythe Level 3 (L3) in software. It is designed to ac-commodate up to ten times the initially projected[3] PEP-II background rates at design luminos-ity and to degrade slowly for backgrounds abovethat level. Redundancy is built into the systemto measure and monitor trigger efficiencies.
During normal operation, the L1 is configuredto have an output rate of typically 1 kHz. Triggersare produced within a fixed latency window of 11–12µs after the e+e−collision, and delivered to the
Fast Control and Timing System (FCTS). Dataused to form the trigger decision are preservedwith each event for efficiency studies.
The L3 receives the output from L1, performs asecond stage rate reduction for the main physicssources, and identifies and flags the special cat-egories of events needed for luminosity determi-nation, diagnostic, and calibration purposes. Atdesign luminosity, the L3 filter acceptance forphysics is ∼90 Hz, while ∼30 Hz contain the otherspecial event categories. The L3 algorithms com-ply with the same software conventions and stan-dards used in all other BABAR software, therebysimplifying its design, testing, and maintenance.
11.3. Level 1 Trigger SystemThe L1 trigger decision is based on charged
tracks in the DCH above a preset transverse mo-mentum, showers in the EMC, and tracks de-tected in the IFR. Trigger data are processedby three specialized hardware processors. As de-scribed below, the drift chamber trigger (DCT)and electromagnetic calorimeter trigger (EMT)both satisfy all trigger requirements indepen-dently with high efficiency, and thereby providea high degree of redundancy, which enables themeasurement of trigger efficiency. The instru-mented flux return trigger (IFT) is used for trig-gering µ+µ− and cosmic rays, mostly for diagnos-tic purposes.
The overall structure of the L1 trigger is illus-
Table 14Cross sections, production and trigger rates forthe principal physics processes at 10.58 GeV for aluminosity of 3× 1033 cm−2s−1. The e+e− crosssection refers to events with either the e+, e−, orboth inside the EMC detection volume.
Cross Production Level 1Event section Rate Triggertype (nb) (Hz) Rate (Hz)
bb 1.1 3.2 3.2other qq 3.4 10.2 10.1e+e− ∼53 159 156µ+µ− 1.2 3.5 3.1τ+τ− 0.9 2.8 2.4

84
[1]Trigger (GLT)Global Level 1
Discriminator (PTD)
IFR Muon Trigger
Drift Chamber BinaryLink Tracker (BLT)
[1]
Synch Board (IFS)[1]
[8]
FastOR
Drift Chamber PT
IFR FEE
134 ns
Fast Control
3 bits/134 ns
DCH FEE
EMC ROM
320 bits/134 ns
176x16 bits/269 ns
32 bits/134 ns 16 bits/134 ns
24 bits/67 ns
90 bits/
Segment Finder (TSF)Drift Chamber Track
Processor Board (TPB)[10]
[24]
Calorimeter Trigger
Figure 82. Simplified L1 trigger schematic. Indi-cated on the figure are the number of components(in square brackets), and the transmission ratesbetween components in terms of total signal bits.
trated in Figure 82. Each of the three L1 triggerprocessors generates trigger primitives, summarydata on the position and energy of particles, thatare sent to the global trigger (GLT) every 134 ns.The DCT and EMT primitives sent to the GLTare φ-maps. An individual φ-map consists of ann-bit word representing a particular pattern oftrigger objects as distributed in fixed-width φ re-gions from 0 to 2π. A trigger object is a quantityindicating the presence of a particle, such as adrift chamber track or a calorimeter energy de-posit. The IFT primitive is a three-bit patternrepresenting the hit topology in the IFR. Themeaning of the various trigger primitive inputsto the GLT are summarized in Table 15.
The GLT processes all trigger primitives toform specific triggers and then delivers them tothe FCTS. The FCTS can optionally mask orprescale any of these triggers. If a valid triggerremains, a L1 Accept is issued to initiate eventreadout. The trigger definition logic, masks, andprescale values are all configurable on a per run
basis.The L1 hardware is housed in five 9U VME
crates. The L1 trigger operates in a continuoussampling mode, generating trigger information atregular, fixed time intervals. The DCH front-endelectronics (FEEs) and the EMC untriggered per-sonality cards (UPCs) send raw data to the DCTand EMT about 2µs after the e+e− collision.The DCT and EMT event processing times are4–5µs, followed by another ∼3µs of processingin the GLT to issue a L1 trigger. The L1 triggertakes approximately 1µs to propagate throughthe FCTS and the readout modules (ROMs) toinitiate event readout. These steps are all ac-complished within the 12.8µs FEE buffer capac-ity limit.
The DCT, EMT and GLT each maintain a four-event buffer to hold information resulting fromthe various stages of the L1 trigger. These dataare read out by the normal data acquisition sys-tem.
11.3.1. Level 1 Drift Chamber TriggerThe input data to the DCT consist of one bit
for each of the 7104 DCH cells. These bits conveytime information derived from the sense wire sig-nal for that cell. The DCT output primitives arecandidate tracks encoded in terms of three 16-bitφ-maps as listed in Table 15.
The DCT algorithms are executed in threetypes of modules [106]. First, track segments,their φ positions and drift time estimates arefound using a set of 24 Track Segment Finder(TSF) modules [107]. These data are thenpassed to the Binary Link Tracker (BLT) mod-ule [108], where segments are linked into completetracks. In parallel, the φ information for segmentsfound in axial superlayers is transmitted to eighttransverse momentum discriminator (PTD) mod-ules [109], which search for tracks above a set pt
threshold.Each of the three DCT modules (TSF, BLT,
and PTD) relies heavily on multiple FPGA’s [110]which perform the control and algorithmic func-tions. All cabling is handled by a small (6U) back-of-crate interface behind each main board.

85
Table 15Trigger primitives for the DCT and EMT. Most energy thresholds are adjustable; those listed are typicalvalues.
Description Origin No. of bits Threshold
B Short track reaching DCH superlayer 5 BLT 16 120 MeV/cA Long track reaching DCH superlayer 10 BLT 16 180 MeV/cA′ High pt track PTD 16 800 MeV/c
M All-θ MIP energy TPB 20 100 MeVG All-θ intermediate energy TPB 20 250 MeVE All-θ high energy TPB 20 700 MeVX Forward endcap MIP TPB 20 100 MeVY Backward barrel high energy TPB 10 1 GeV
Track Segment Finder
The TSF modules are responsible for find-ing track segments in 1776 overlapping eight-cellpivot groups. A pivot group is a contiguous setof cells that span all four layers within a super-layer. The pivot group shape is such that onlyreasonably straight tracks originating from theinteraction point can produce a valid segment.Figure 83 shows the arrangement of cells withina pivot group. Cell 4 is called the pivot cell ;the TSF algorithm is optimized to find track seg-ments that pivot about this cell.
The DCH signals are sampled every 269 ns.The passage of a single particle through the DCHwill produce ionization that drifts to the sensewires in typically no more than four of theseclock ticks. Each cell is associated with a two-bitcounter that is incremented at every clock tick forwhich a signal is present. In this way, a short timehistory of each cell is preserved. For each clocktick, the collection of two-bit counters for eachpivot group forms a 16-bit value used to addressa look-up-table. This look-up-table contains two-bit weights indicating whether there is no accept-able segment, a low-quality segment, a three-layersegment (allowing for cell inefficiencies), or a four-layer segment. When an acceptable segment isfound, that pivot group is examined to determinewhich of three subsequent clock ticks produce thehighest weight or best pattern.
The look-up-table also contains position andtime information which, along with a summary of
Track
6 24
5 17 3 0
Pivot cell layerSuperlayer
8 Cell Template
Figure 83. Track Segment Finder pivot group.
cell occupancies, forms the basis of data sent tothe BLT and PTD. The TSF algorithm uses thetime-variation of the look-up-table weights to re-fine both the event time and its uncertainty, thusenabling it to output results to the BLT every134 ns.
The position resolution as measured from thedata after calibration, is typically ∼600µm for afour-layer segment and ∼900µm for a three-layersegment. For tracks originating from the IP, theefficiency for finding TSF segments is 97%, andthe efficiency for high-quality three-layer or four-layer TSF segments is 94%.
Binary Link Tracker
The BLT receives segment hit information fromall 24 TSF’s at a rate of 320 bits every 134 nsand links them into complete tracks. The seg-ment hits are mapped onto the DCH geometry in

86
terms of 320 supercells, 32 sectors in φ and tenradial superlayers. Each bit indicates whether asegment is found in that supercell or not. TheBLT input data are combined using a logical ORwith a programmable mask pattern. The mask-ing allows the system to activate track segmentscorresponding to dead or highly inefficient cellsto prevent efficiency degradation. The linking al-gorithm uses an extension of a method developedfor the CLEO-II trigger [111]. It starts from theinnermost superlayer, A1, and moves radially out-ward.
Tracks that reach the outer layer of the DCH(superlayer A10) are classified as type A. Tracksthat reach the middle layer (superlayer U5) areclassified as type B. An A track is found if thereis a segment in at least eight superlayers and ifthe segments in two consecutive superlayers fallazimuthally within three to five supercells of eachother (depending on the superlayer type). Thisallows for track curvature and dip angle varia-tions. The data are compressed and output tothe GLT in the form of two 16-bit φ-maps, oneeach for A and B tracks.
PT Discriminator
The eight PTD modules receive φ informationof high quality track segments in the axial super-layers (A1, A4, A7 and A10), and determine if thesegments are consistent with a track pt greaterthan a configurable minimum value. An envelopefor tracks above the minimum pt is defined usingthe IP, and a track segment position in one of theseed superlayers, A7 or A10. A high pt candidate,denoted as A′, is identified when sufficient tracksegments with accurate φ information from theother axial superlayers lie within this envelope.
Each PTD module searches for seed segmentsin superlayers A7 and A10, and within a 45-degree azimuthal wedge of the DCH. This searchregion spans eight supercells, and the processingfor each supercell is performed by its own process-ing engine on the PTD. The principal componentsin each engine are an algorithmic processor andlook-up-tables containing the limits for each in-dividual seed position. The contents of the look-up-tables specify the allowed track segment posi-tions for each of the three other axial superlayers
0
0.25
0.5
0.75
1
0 0.25 0.5 0.75 1
Track Transverse Momentum (GeV/c)
D
CT
Eff
icie
ncy
B A A,
Figure 84. DCT track efficiency versus trans-verse momentum for A, B, and A′ tracks. TheA′ threshold is set to 800 MeV/c.
and consequently define the effective pt discrim-ination threshold. The resulting pt threshold forthe PTD A′ tracks is shown in Figure 84 togetherwith the BLT A, B track efficiency.
11.3.2. Level 1 Calorimeter TriggerFor trigger purposes, the EMC is divided into
280 towers, 7 × 40 (θ × φ). Each of the barrel’s240 towers is composed of 24 crystals in a 8 ×3 (θ × φ) array. The endcap is divided into 40towers, each forming a wedge in φ containing 19–22 crystals. For each tower, all crystal energiesabove a threshold of 20 MeV are summed and sentto the EMT every 269 ns.
The conversion of the tower data into the GLTφ-maps is performed by ten Trigger ProcessorBoards (TPBs). The TPBs determine energiesin the 40 φ sectors, summing over various rangesof θ, compare these energies against thresholdsfor each of the trigger primitives (see Table 15),estimate the time of energy deposition, correct fortiming jitter, and then transmit the result to theGLT.
Each TPB receives data from 28 towers, corre-sponding to an array of 7× 4 in θ × φ, or four φ-sectors. Each of the 40 φ-sectors is summed inde-pendently. To identify energy deposits that span

87
two adjacent φ-sectors, the energy of each sectoris also made available to the summing circuit fora single adjoining sector in such a way that allpossible pairs of adjacent φ-sectors are summed.These energy sums are compared against thresh-olds to form trigger objects. Each sum is also sentto an eight-tap finite impulse response (FIR) dig-ital filter which is used to estimate the energydeposition time. A look-up-table is used to makean energy-dependent estimate of the timing jit-ter which, along with the FIR output, is used totime the transmission of any trigger objects to theGLT. Pairs of φ-sectors are ORed to form 20-bitφ-maps for the M, G, E, and X primitives, whilefor the Y primitive, groups of four are ORed toform a 10-bit φ-map. The complete algorithm isimplemented in one FPGA [112] for each φ-sector,with four identical components per TPB. Furtherdetails of the EMT system can be found in [113].
The basic performance of the EMT can be ex-pressed in terms of the efficiency and timing jit-ter of the trigger primitives. The efficiency ofthe primitives can be measured by the number oftimes a trigger bit is set for a specific energy re-constructed offline in events from a random trig-ger. Figure 85 shows this efficiency for energiesnear the M threshold. The efficiency changesfrom 10% to 90% in the range of 110 to 145 MeV,and reaches 99% at 180 MeV, close to the averageenergy deposition of a minimum ionizing particleat normal incidence.
The EMT time jitter is measured by comparingthe time centroid of φ-strip M hits in µ+µ− eventswith the DCH track start time, t0. The differencehas an rms width of 90 ns with >99.9% of thematching M hits within a ±500 ns window.
11.3.3. Level 1 IFR TriggerThe IFT is used for triggering on µ+µ− and
cosmic rays. For the purposes of the trigger, theIFR is divided into ten sectors, namely the sixbarrel sextants and the four half end doors. Theinputs to the IFT are the Fast OR signals of allφ readout strips in eight selected layers in eachsector.
A majority logic algorithm defines trigger ob-jects for every sector in which at least four of theeight trigger layers have hits within a time win-
EMC Cluster Energy (GeV)
EM
T E
ffic
ienc
y
0.00
0.25
0.5
0.75
1
0.05 0.1 0.15 0.2
Figure 85. EMT M efficiency vs. EMC clusterenergy for an M threshold setting of 120 MeV.
Table 16IFR trigger pattern (U) definition, where µ refersto a signal within a sector.
U Trigger condition
1 ≥ 2µ topologies other than U = 5− 72 1 µ in backward endcap3 1 µ in forward endcap4 1 µ in barrel5 2 back-back µ’s in barrel +1 forward µ6 1 µ in barrel +1 forward µ7 2 back-back µ’s in barrel
dow of 134 ns. The IFR trigger synchronizationmodule processes the trigger objects from the tensectors and generates the three-bit trigger word(U) encoding seven exclusive trigger conditions,as defined in Table 16. The trigger U ≥ 5, forexample, covers all µ+µ− topologies of interest.
The efficiency of the IFT has been evaluated us-ing cosmic rays triggered by the DCT and cross-ing the detector close to the IP. For these events,98% were triggered by the IFT as events withat least one track, and 73% as events with twotracks, inside the geometrical region of the IFR.

88
Most of the IFT inefficiency is concentrated atthe boundaries between sectors.
11.3.4. Global TriggerThe GLT receives the eight trigger primitives
in the form of φ-maps as listed in Table 15 alongwith information from the IFT (Table 16) to formspecific triggers that are then passed to the FCTSfor the final trigger decision. Due to the differentlatencies associated with the production of theseprimitives, the GLT forms a time alignment ofthese input data using configurable delays.
The GLT then forms some additional combinedφ-maps from the DCT and EMT data. Thesemaps include matched objects such as BM for Btracks matched to an M cluster in φ, back-to-backobjects, B∗ and M∗, which require a pair of φbits separated by a configurable angle of typically∼ 120, and an EM∗ object for back-to-back EMpairs.
All 16 φ-maps are then used to address indi-vidual GLT look-up-tables which return three-bitcounts of trigger objects contained within thosemaps, e.g., the number of B tracks or number ofM clusters. To count as distinct trigger objects,the map bits are typically required to have a sep-aration of more than one φ bin. The resulting 16counts plus the IFT hit pattern are then tested inlogical operations. The permissible operations in-clude: always-pass; or a comparison (≥, =, or <)with a configurable selection parameter. A trig-ger line is then set as the logical AND of these 17operations. This process is performed for each ofthe 24 trigger lines.
The GLT derives the L1 trigger time from thecentroid of the timing distribution of the highestpriority trigger, binned in the 134 ns interval andspanning about 1µs. Other trigger signals com-patible with this time are retained and cached.The average time is calculated to the nearest 67 nsand the 24-bit GLT output signal is sent to theFCTS every 67 ns. The achieved timing resolu-tion for hadronic events has an rms width of 52 ns;and 99% of the events are within 77 ns.
The GLT hardware consists of a single 9UVME module. Most of the logic, including di-agnostic and DAQ memories, are implemented inFPGA’s [110]. The look-up-table section is im-
plemented as an array of 16 memory chips with8 Mbytes of configuration data.
11.4. Level 1 Trigger Performanceand Operational Experience
The L1 trigger configuration consists of DCT-only, EMT-only, mixed and prescaled triggers,aimed not only for maximum efficiency and back-ground suppression, but also for the convenienceof trigger efficiency determination.
Although most triggers target a specific physicssource, they often also select other processes. Forexample, two-track triggers are not only efficientfor Bhabha, µ+µ−, and τ+τ− events, but are alsouseful for selecting jet-like hadronic events andsome rare B decays.
The efficiencies and rates of selected L1 trig-gers for various physics processes are listed inTable 17. Although triggering on generic BBevents is relatively easy, it is essential to en-sure high efficiencies for the important rare low-multiplicityB decays. For this reason, efficienciesfor B0 → π0π0 and B− → τ−ν are also listed inTable 17.
The efficiencies listed for the hadronic eventsare absolute and include acceptance losses basedon Monte Carlo simulation, and local inefficiencyeffects. The efficiencies for τ -pair events are forfiducial events, i.e., events with two or moretracks with pt > 120 MeV/c and polar angle θ toreach at least DCH superlayer U5. The Bhabhaand µ-pair efficiencies are determined from thedata, for events with two high momentum parti-cles, which are back-to-back in the c.m. system,and within the EMC fiducial volume. The data inTable 17 demonstrate that the DCT and the com-bined EMT/IFT provide fully efficient, indepen-dent triggers for most physics processes, althoughindependent triggers for µ+µ− and τ+τ− are notindividually fully efficient. The efficiencies pre-dicted by the Monte Carlo simulation are gener-ally in good agreement with data when tested us-ing events passing typical analysis selections andbased on orthogonal triggers. Prescaled triggerswith a very open acceptance of physics events,such as (B≥2 & A≥1) or (M≥2) are also used tomeasure the trigger efficiencies.
The trigger rates listed in Table 17 are for a

89
Table 17Level 1 Trigger efficiencies (%) and rates (Hz) at a luminosity of 2.2× 1033 cm−2s−1 for selected triggersapplied to various physics processes. The symbols refer to the counts for each object.
Level 1 Trigger εBB εB→π0π0 εB→τν εcc εuds εee εµµ εττ Rate
A≥3 & B∗ ≥1 97.1 66.4 81.8 88.9 81.1 — — 17.7 180A≥1 & B∗ ≥1 & A′ ≥1 95.0 63.0 83.2 89.2 85.2 98.6 99.1 79.9 410Combined DCT (ORed) 99.1 79.7 92.2 95.3 90.6 98.9 99.1 80.6 560
M≥3 & M∗ ≥1 99.7 98.6 93.7 98.5 94.7 — — 53.7 160EM∗ ≥1 71.4 94.9 55.5 77.1 79.5 97.8 — 65.8 150Combined EMT (ORed) 99.8 99.2 95.5 98.8 95.6 99.2 — 77.6 340
B≥3 & A≥2 & M≥2 99.4 81.2 90.3 94.8 87.8 — — 19.7 170M∗ ≥1 & A≥1 & A′ ≥1 95.1 68.8 83.7 90.1 87.0 97.8 95.9 78.2 250E≥1 & B≥2 & A≥1 72.1 92.4 60.2 77.7 79.2 99.3 — 72.8 140M∗ ≥1 & U≥5 (µ-pair) — — — — — — 60.3 — 70
Combined Level 1 triggers >99.9 99.8 99.7 99.9 98.2 >99.9 99.6 94.5 970
typical run with HER (LER) currents at 650 mA(1350 mA) and a luminosity of 2.2×1033 cm−2s−1.These rates are stable to within 20% for the samePEP-II configuration, but they are impacted bychanges in vacuum conditions, beam currents,and orbits. There are occasional backgroundspikes which can double the L1 rate. However,due to the 2 kHz capability of the data acquisi-tion, these spikes do not induce significant deadtime.
For a typical L1 rate of 1 kHz, Bhabha andannihilation physics events contribute ∼130 Hz.There are also 100 Hz of cosmic ray and 20 Hz ofrandom beam crossing triggers. The remainingtriggers are due to lost particles interacting withthe beam pipe or other components. The distri-bution of single track z0 values as reconstructedby L3 for all L1 triggers is shown in Figure 86.The most prominent peaks at z = ±20 cm cor-respond to a flange of the beam pipe. The peakat z0 = −55 cm corresponds to a step in the syn-chrotron mask.
The L1 trigger hardware operation has beenvery stable. For the first one and half years of op-eration, there have been only four hardware fail-ures in the L1 system, mainly auxiliary or com-munication boards. Occasional adjustments tothe EMT tower mask were used to temporarily
L3 Track z0 (cm)
No.
of
Tra
cks
0
2000
4000
6000
8000
-80 -40 0 40 80
Figure 86. Single track z0 for all L1 tracks, re-constructed by L3.
suppress noisy channels in the EMC electronics.
11.5. Level 3 Trigger SystemThe L3 trigger software comprises event recon-
struction and classification, a set of event selec-tion filters, and monitoring. This software runson the online computer farm. The filters have ac-cess to the complete event data for making theirdecision, including the output of the L1 trigger

90
processors and FCTS trigger scalers. L3 operatesby refining and augmenting the selection meth-ods used in L1. For example, better DCH track-ing (vertex resolution) and EMC clustering filtersallow for greater rejection of beam backgroundsand Bhabha events.
The L3 system runs within the Online EventProcessing (OEP) framework (see Section 12).OEP delivers events to L3, then prescales andlogs those which pass the L3 selection criteria.
To provide optimum flexibility under differentrunning conditions, L3 is designed according to ageneral logic model that can be configured to sup-port an unlimited variety of event selection mech-anisms. This provides for a number of different,independent classification tests, called scripts,that are executed independently, together witha mechanism for combining these tests into thefinal set of classification decisions.
The L3 trigger has three phases. In the firstphase, events are classified by defining L3 inputlines, which are based on a logical OR of any num-ber of the 32 FCTS output lines. Any number ofL3 input lines may be defined.
The second phase comprises a number ofscripts. Each script executes if its single L3 inputline is true and subsequently produces a singlepass–fail output flag. Internally, a script may ex-ecute one or both of the DCH or EMC algorithms,followed by one or more filters. The algorithmsconstruct quantities of interest, while the filtersdetermine whether or not those quantities satisfythe specific selection criteria.
In the final phase, the L3 output lines areformed. Each output line is defined as the log-ical OR of selected script flags. L3 can treatscript flags as vetoes, thereby rejecting, for exam-ple, carefully selected Bhabha events which mightotherwise satisfy the selection criteria.
L3 utilizes the standard event data analysisframework and depends crucially on several of itsaspects. Any code in the form of modules can beincluded and configured at run time. A sequenceof these software modules compose a script. Thesame instance of a module may be included inmultiple scripts yet it is executed only once, thusavoiding significant additional CPU overhead.
11.5.1. Level 3 Drift ChamberTracking Algorithm
Many events which pass L1 but must be re-jected by L3 are beam-induced charged particlebackground that are produced in material closeto the IP. L1 does not currently have sufficienttracking resolution to identify these backgroundtracks. The DCH-based algorithm, L3Dch, per-forms fast pattern recognition (track finding) andtrack fitting, which determines the five helix trackparameters for tracks with pt above 250 MeV/c.To speed up the process of pattern recognition,L3Dch starts with the track segments from theTSF system and improves the resolution by mak-ing use of the actual DCH information.
For those TSF segments that have a simple so-lution to the left-right ambiguity, a track t0 isdetermined. The t0 values for each segment in anevent are binned and the mean produced from thevalues in the most populated bin is used as theestimated event t0. All events which pass L1 typi-cally have enough segments to form a t0 estimate.The measured rms resolution on this estimate is1.8 ns for Bhabha events and 3.8 ns for hadronicevents.
The pattern recognition for L3Dch is done witha look-up-table. For this track table, the DCH isdivided into 120 φ-sectors, corresponding to thenumber of cells in the innermost layers. The tracktable is populated with the hit patterns of MonteCarlo generated tracks with a pt above 250 MeV/cand originating within 2 cm of the IP in the x–yplane, and within 10 cm in z. The pattern recog-nition algorithm searches the table entries lookingfor matches to segments found by the TSFs. Thematched set of segments for a given track is thenpassed to the track fitting algorithm. The tracktable allows for up to two missing DCH TSF seg-ments per track.
The track fitting algorithm is provided withboth the track segments found in pattern recog-nition and the individual hits within those seg-ments. From this information the five helix pa-rameters are fitted. The fit is then iterated,adding segments close to the initially fitted track,and dropping hits with large residuals. The finalfit does not demand that the track originate fromthe IP.

91
0
500
1000
1500
2000
2500
-1 0 1
∆d0 (cm)
No.
of
Eve
nts
∆z0 (cm)-8 0 8
Figure 87. Transverse and longitudinal miss dis-tances between the two tracks in Bhabha events.
The two-track miss distances for Bhabha eventsare plotted in Figure 87. The resolutions for indi-vidual tracks are 0.80 mm and 6.1 mm for d0 andz0, respectively. Similarly, the 1/pt difference be-tween the two tracks in µ-pair events yields a pt
resolution of δpt/pt ∼ 0.019·pt, with pt in GeV/c.
11.5.2. Level 3 CalorimeterClustering Algorithm
The all-neutral trigger for L3 is based on infor-mation from the EMC. In addition, calorimeterinformation is a vital complement to the DCHdata for the identification of Bhabha events.
The L3 EMC-based trigger, L3Emc, identifiesenergy clusters with a sensitivity sufficient forfinding minimum ionizing particles. EMC dataare processed in two steps: first, lists of crystalswith significant energy deposits are formed; andsecond, clusters are identified. The EMC typi-cally sends data for∼1400 crystals (of 6580 total).The majority of these are caused by electronicsnoise and beam-induced background. For eachcrystal, these data include the peak energy andtime of the crystal waveform. To filter out noise,L3Emc rejects individual crystal signals below anenergy threshold of 20 MeV or which lie outsidea 1.3µs time window around the event time. Forthe remaining crystals, raw energies and times areconverted into physical units and added to theL3Emc crystal list. Clusters are formed using anoptimized look-up-table technique requiring onlya single pass over the crystal list. Clusters with atotal energy above 100 MeV are retained, and theenergy weighted centroid and average time, thenumber of crystals, and a lateral moment describ-
ing the shower shape for particle identification arecalculated.
11.5.3. Level 3 FiltersBased on the L3 tracks and clusters, a variety
of filters perform event classification and back-ground reduction. The logging decision is pri-marily made by two orthogonal filters, one basedexclusively on DCH data and the other based onlyon EMC data.
The drift chamber filters select events with onetight (high pt) track or two loose tracks originat-ing from the IP, respectively. To account for thefact that the IP is not exactly at the origin, trackselection is based on its x–y closest approach dis-tance to the IP, dIP0 , and zIP0 , the correspondingz coordinate for that point. The IP position isa fixed location close to the average beam po-sition over many months. The high pt track isrequired to have a transverse momentum of pt >600 MeV/c and to satisfy a vertex condition de-fined as |dIP0 | < 1.0 cm, and |zIP0 − zIP | < 7.0 cm.Two tracks are accepted with pt>250 MeV/c anda somewhat looser vertex condition defined as|dIP0 | < 1.5 cm, |zIP0 − zIP | < 10.0 cm.
Two calorimeter cluster filters select eventswith either high energy deposits or high clustermultiplicity. Each filter also requires a high effec-tive mass calculated from the cluster energy sumsand the energy weighted centroid positions of allclusters in the event assuming massless particles.The first filter requires at least two clusters ofECM > 350 MeV (c.m. system energy) and eventmass greater than 1.5 GeV; the second filter re-quires at least four clusters, and an event massgreater than 1.5 GeV.
At current luminosities, the output of both theDCH and EMC filters is dominated by Bhabhaevents, which need to be rejected. This is ac-complished by a Bhabha veto filter that selectsone-prong (with only a positron in the backwardpart of the detector) and two-prong events (withboth e+ and e− detected). Stringent criteria onEMC energy deposits are imposed, relying on thetrack momenta and on E/p. The two-prong vetorequires either colinearity between the tracks inthe c.m. system or an acolinearity that is consis-tent with initial state radiation (ISR).

92
For purposes of calibration and offline luminos-ity measurements, Bhabha, radiative Bhabha, γγfinal state, and cosmic ray events are flagged. Theoutput rate of flagged Bhabha events is adjustedto generate an approximately flat distribution ofevents in polar angle. Radiative Bhabha eventsare identified by selecting two-prong events withmissing energy and requiring an EMC cluster inthe direction of the missing momentum. Eventswith two high energy clusters, back-to-back in thec.m. system select the e+e− → γγ process. Thecosmic ray selection is DCH-based and requirestwo back-to-back tracks in the laboratory framewith nearly equal impact parameters and curva-ture. A significant background from ISR Bhabhaevents faking this topology is removed using thesame kinematic constraints used in the two-prongveto.
The online luminosity monitoring and energyscale monitoring are performed in L3. A track-based lepton-pair selection with a well known ef-ficiency monitors the luminosity. Hadronic filtersfor selection of continuum and BB-enriched sam-ples monitor the energy scale. The latter two cat-egories are distinguished by an event shape selec-tion using a ratio of Fox-Wolfram moments [114].The ratio of the BB-enriched sample to the lu-minosity is a sensitive measure of relative posi-tion on the Υ (4S) peak and thereby monitors thebeam energies.
11.6. Level 3 Performanceand Operational Experience
The L3 trigger efficiency for Monte Carlo sim-ulated events are tabulated in Table 18 for eventspassing Level 1. High efficiencies are indepen-dently achieved for the DCH and EMC based fil-ters applied to simulated hadronic events. Thecomparison between data and Monte Carlo L3trigger pass fractions for the various filters alsoshow good agreement when requiring tracking,and EMC based hadronic event selections in turn.
An example of the event display used for onlinetrigger monitoring is shown in Figure 88. L3 re-constructed tracks and EMC clusters are showntogether with the L1 and L3 trigger line statesfor the event. The left column lists the L1 trig-ger lines and their states: on (1); off (0); or on
Table 19Composition of the L3 output at a luminosity of2.6×1033 cm−2s−1.
Event type Rate (Hz)
Hadrons, ττ , and µµ 16Other QED, 2-photon events 13Unidentified Bhabha backgrounds 18Beam-induced backgrounds 26
Total physics accept 73
Calibration Bhabhas (e+e−) 30γγ, Radiative Bhabhas (e+e−γ) 10Random triggers and cosmic rays 2L1,L3 pass through diagnostics 7
Total calibration/diagnostics 49
but ignored due to prescale factor (-1). The rightcolumn shows the same information for the L3trigger lines.
For a typical run on the Υ (4S) peak with anaverage luminosity of 2.6×1033 cm−2s−1, the L3event composition is tabulated in Table 19. Thedesired physics events contribute 13% of the totaloutput while the calibration and diagnostic sam-ples comprise 40%.
The L3 executable currently takes an averageprocessing time of 8.5 ms per event per farm com-puter. A Level 1 input rate of 2700 Hz saturatesthe Level 3 processors, well above the 2 kHz de-sign requirement. At this input rate the L3 pro-cess consumes ∼72% of the CPU time, the rest isspent in OEP, including the network event builderand in the operating system kernel.
11.7. Summary and OutlookBoth the L1 and L3 trigger systems have met
their original design goals at a luminosity of3 × 1033 cm−2s−1. The triggering efficiencies forBB events generally meet the 99% design goal forboth L1 and L3. The orthogonal triggers based onDCH-only and EMC-only information have suc-cessfully delivered stable and measurable overalltrigger efficiency. The current system also pro-vides a solid foundation for an upgrade path toluminosities of 1034 cm−2s−1 or more.
Short-term L1 trigger improvements will pri-

93
Figure 88. A Level 3 event display. The small circles and small crosses in the DCH volume areDCH hits and TSF segment hit wires respectively. The filled EMC crystals represent energy deposit(full crystal depth = 2 GeV) from Level 3 EMC clusters while the small triangles just inside the EMCindicate the location of the cluster centroid.
marily come from further background rejection,afforded by algorithm refinements and upgradesof the DCT. This is essential for reducing the loadon the DAQ and L3. The new PTD algorithm willeffectively narrow the track d0 acceptance win-dow, while a new BLT algorithm will narrow thetrack z0 acceptance.
For the longer term future, a major DCT up-grade is planned. By adding the stereo layer in-formation, a z0 resolution of 4 cm is expected, al-lowing for an efficient rejection of beam-inducedbackground beyond z = ±20 cm.
Future improvements for L3 will also empha-size background rejection. Improvements in theL3 IP track filter are expected to further reducebeam-induced background to about one third ofcurrent levels. The physics filter algorithms willbe tuned and improved, primarily for rejectingBhabha, QED, and two-photon events. Improve-ments in the L3 tracking algorithms are expectedto lower the pt thresholds below 250 MeV/c. Amoderate CPU upgrade for the L3 online farmwill be sufficient to keep up with luminosities of∼ 1034 cm−2s−1.

94
Table 18L3 trigger efficiency (%) for various physics processes, derived from Monte Carlo simulation.
L3 Trigger εBB εB→π0π0 εB→τν εcc εuds εττ
1 track filter 89.9 69.9 86.5 89.2 88.2 94.12 track filter 98.9 84.1 94.5 96.1 93.2 87.6Combined DCH filters 99.4 89.1 96.6 97.1 95.4 95.5
2 cluster filter 25.8 91.2 14.5 39.2 48.7 34.34 cluster filter 93.5 95.2 62.3 87.4 85.5 37.8Combined EMC filters 93.5 95.7 62.3 87.4 85.6 46.3
Combined DCH+EMC filters >99.9 99.3 98.1 99.0 97.6 97.3
Combined L1+L3 >99.9 99.1 97.8 98.9 95.8 92.0
12. The Online Computing System
12.1. OverviewThe BABAR online computing system comprises
the data acquisition chain from the common FEE,through the embedded processors in the data ac-quisition system and the L3 trigger, to the loggingof event data. It also includes those componentsrequired for detector and data acquisition controland monitoring, immediate data quality monitor-ing, and online calibration.
12.1.1. Design RequirementsThe data acquisition chain was designed to
meet the following basic performance require-ments. It must support a L1 trigger accept rateof up to 2 kHz, with an average event size of∼32 kbytes and a maximum output (L3 triggeraccept) rate of 120 Hz. While performing thesefunctions it should not contribute more thana time-averaged 3% to deadtime during normaldata acquisition.
The online system is also required to be capa-ble of performing data acquisition simultaneouslyon independent partitions—sets of detector sys-tem components—to support calibrations and di-agnostics.
Normal detector operation, data acquisitionand routine calibrations are performed efficientlyand under the control of a simple user interfacewith facilities for detecting, diagnosing, and re-covering from common error conditions.
Following standard practice, the event data ac-
quired by the system are subjected to monitoring.Such monitoring is configurable by experts anddesigned to detect anomalies in the detector sys-tems which, if present, are reported to operatorsfor rapid assessment and, if necessary, correctiveaction.
Environmental conditions of the detector, suchas the state of low and high voltage power, the pu-rity of gas supplies, and the operating conditionsof the accelerator, such as beam luminosity andcurrents, are measured and recorded in a fash-ion that permits the association with the eventdata logged. Conditions relevant to data qualityare monitored for consistency with specified stan-dards. Operators are alerted if these are not met.Data-taking is inhibited or otherwise flagged ifconditions are incompatible with maintaining thequality of the data.
Operational configurations, calibration results,active software version numbers, and routine mes-sages and error messages are also recorded. Dur-ing data analysis or problem diagnosis, these datahelp in reconstructing the detailed operating con-ditions.
12.1.2. System ComponentsThe online computing system is designed as a
set of subsystems using elements of a commonsoftware infrastructure running on a dedicatedcollection of hardware.
The major subsystems are:
• Online Dataflow (ODF)—responsible for

95
communication with and control of the de-tector systems’ front-end electronics, andthe acquisition and building of event datafrom them;
• Online Event Processing (OEP)—responsible for processing of completeevents, including L3 (software) triggering,data quality monitoring, and the finalstages of calibrations;
• Logging Manager (LM)—responsible for re-ceiving selected events sent from OEP andwriting them to disk files for use as input tothe Online Prompt Reconstruction process-ing;
• Online Detector Control (ODC)—responsible for the control and monitoringof environmental conditions of the detectorsystems;
• Online Run Control (ORC)—ties togetherall the other components, and is responsi-ble for sequencing their operations, inter-locking them as appropriate, and providinga graphical user interface (GUI) for opera-tor control.
Each of these components, as well as a selectionof the common tools which tie them together aredescribed below.
The entire system is coded primarily in theC++ language, with some use of Java for graph-ical user interfaces. Object-oriented analysis anddesign techniques have been used throughout.This has been an important feature, enhancingdevelopment speed, maintainability, and extensi-bility.
12.1.3. Hardware InfrastructureThe hardware infrastructure for the online sys-
tem is shown schematically in Figure 89.The data from the FEEs of the various detector
systems are routed via optical fiber links to a setof 157 custom VME Readout Modules (ROMs).These ROMs are grouped by detector system andhoused in 23 data acquisition VME crates thatare controlled by the ODF software. One ROMin each crate aggregates the data and forwards
them for event building to 32 commercial Unixworkstations [115] which are part of the onlinefarm. Other farm machines perform data moni-toring and calibrations. The crates and farm ma-chines communicate via full-duplex 100 Mbits/sEthernet, linked by a network switch—the eventbuilder switch [116]. The ROMs are supported bya boot server providing core and system-specificcode and configuration information [117].
The thirty-two online farm machines host theOEP and L3 trigger software. The events ac-cepted by the trigger are logged via TCP/IP to alogging server [117] and written to a disk bufferfor later reconstruction and archival storage. Var-ious data quality monitoring processes run onfarm machines not used for data acquisition.
Several additional file servers hold the onlinedatabases and production software releases. Afurther set of application servers host the centralfunctions of the various online subsystems. Op-erator displays are supported by a group of tenconsole servers [118].
An additional set of 15 VME crates, each withan embedded processor, contain the data acquisi-tion hardware for the detector control subsystem.
All VME crates, the online farm, and all theapplication and console servers are connected viaa switched 100 Mbits/s Ethernet network distinctfrom that used for event building, with 1 Gbits/sfiber Ethernet used for the file servers and inter-switch links.
12.1.4. User interactionOperator control of the online system is
achieved primarily through a custom Motif GUIfor run control and an extensive hierarchy of dis-plays for detector control, including control pan-els, strip charts and an alarm handler. An elec-tronic logbook is made available through a Webbrowser interface. These and other GUIs are or-ganized across seventeen displays for the use ofthe experiment’s operators. This operator envi-ronment provides for basic control of data acquisi-tion, the overall state of the detector, and certaincalibration tasks.
Each detector system has developed a set ofspecialized calibration and diagnostic applica-tions using the tools provided in the online sys-

96
farm nodes
FEE
file and DBservers
[15]
[5]
detectorcontrol
VME
740 GB[1]
serversconsole
switchbuilder
[10]
serversapplication
event
center
[78]
[10]
BABAR
computer
loggingserver
720 GB
[1]
VMEdataflow
detector
x78
network
x16
1.2 Gbps G-Links
x78
various analog/digital links
switches
[2]
x10
x10
...monitors [17]
x24
[24]
100 Mbps ethernet
1 Gbps ethernet
Figure 89. Physical infrastructure of the BABAR online system, including VME crates, computers, andnetworking equipment.
tem. A subset of these calibrations has been spec-ified to be run once per day, during a ten-minutescheduled beam-off period. The run control logic,combined with the capability for creating parti-tions, allows calibrations for all detector systemsto be run in parallel and provides the operatorwith basic feedback on the success or failure ofeach.
12.2. Online DataflowODF handles data acquisition and processing
from the detector systems’ FEE through the de-livery of complete events to the online farm [119].The ODF subsystem receives the L1 trigger out-puts, filters and distributes them to the FEE,reads back the resulting data and assembles theminto events. It provides interfaces for control ofdata acquisition, processing and calibration of de-tector system data, and FEE configuration. Mul-tiple independent partitions of the detector maybe operated simultaneously.
Event data acquisition proceeds from a trig-ger decision formed in the Fast Control and Tim-ing System (FCTS) [120] based on inputs from
the L1 trigger. L1 Accepts are distributed, inthe full detector configuration, to the 133 ROMsconnected via optical fibers to the detector sys-tem FEE. These ROMs read and process the datafrom the FEE. One to ten such ROMs from a sin-gle detector system are located in each of the dataacquisition VME crates. ODF builds completeevents from these ROMs, first collecting the datain each crate into an additional dedicated ROM,and then collecting the data from the 23 of these,across the event builder network switch, into theonline farm.
The operation of the system is controlled byODF software running on one of the applicationservers, under the direction of run control. A sin-gle ROM in the VME crate containing the centralFCTS hardware supports the software interfaceto ODF. The distribution of ROMs by detectorsystem is shown in Table 20. The numbers ofROMs is shown as a sum of those connected di-rectly to the detector FEE, and those used forevent building.
All of the ROM CPUs boot via NFS over the

97
Table 20VME crates and ROMs used by ODF
Detector VME ReadoutSystem Crates Modules
SVT 5 14+5DCH 2 4+2DIRC 2 6+2EMC 10 100+10IFR 1 4+1EMT 1 1+1DCT 1 3+1GLT 1 1+1FCTS 1 1
TotalTotal 24 157
event building network from the boot server de-scribed above. About 1.5 Mbytes of core ODFcode plus another ∼4 Mbytes of detector-specificcode are loaded into each ROM. This, along withthe booting process, takes about 40 seconds.
The ODF software allows all the componentsof this heterogeneous system to be represented ina uniform object-oriented application framework.These components are organized into five levelswhich map closely onto the physical structure.
For each component at each level, its operationis abstracted as a finite state machine. The com-plete set of these machines is kept coherent bypassing messages and data regarding state tran-sitions along the chain of levels. The basic flowof control and data is shown in Figure 90. Themapping of levels to components is as follows:
Control The Unix-based process controllingthe operation of each partition and the sourceof all state transitions except for L1 Accept. Ittransmits state transition messages over the net-work to the source level, waiting for acknowledge-ment of their successful processing by all levels.
Source The FCTS hardware and the softwarerunning in the ROM located in the FCTS VMEcrate. For each partition, its source level receivescontrol level transitions and L1 trigger outputsand distributes them via the FCTS hardware toall ROMs in the VME crates included in the par-tition. L1 triggers are modeled in the subsystem
as an additional, idempotent state transition, L1Accept, and are treated uniformly with the otherswherever possible.
Segment The ROMs connected to the detec-tor FEE, with their ODF and detector system-specific software. Each segment level ROM re-ceives state transition messages from the sourcelevel and runs appropriate core and detectorsystem-specific tasks in response. These tasks in-clude the acquisition of raw data from the FEEin response to L1 Accepts, and feature extraction.Output data resulting from this processing is at-tached to the transition messages, which are thenforwarded over the VME backplane to the frag-ment level ROM in each crate.
Fragment The per-crate event builder ROMsand software. The single fragment level ROMin each crate aggregates the messages from thecrate’s segment level ROMs—the first stage ofevent building—and forwards the combined mes-sage to one of the event level Unix nodes.
Event The processes on the online farm nodesreceiving complete events and handing them overto OEP for filtering and logging. The ODF eventlevel code aggregates messages, with their at-tached data, from all the crates in a partition—the second and final stage of event building. Theresulting data may be further processed by usercode in the event level, but are normally justpassed on to OEP. The control level is noti-fied of the completion of processing of all tran-sitions other than L1 Accept. Both the fragmentand event level event builders use a data-driven“push” model, with a back pressure mechanismto signal when they are unable to accept moredata.
Test stands of varying complexity are sup-ported. The simplest possible consists of a singleUnix machine which runs both control and eventlevel code, with two FCTS modules and a sin-gle ROM, running source, segment, and fragmentlevel code, in one VME crate. Configuration isdetected at run-time, so the same code that runsin the full system can also run in test stand sys-tems.

98
Source(FCTS)
Segment(1-10/crate)
Fragment(Crate)
EventControl
Run Control
x1 Unix x1 FCTS ROM x32 Unix farmx133 ROMs x23 Slot- 1 ROMs
L1 Trigger Detector FEEs control
control & data
3-2001 8583A47
Figure 90. Schematic of the ODF levels, their mapping onto physical components, and the flow of controlsignals and data between them.
12.2.1. Control and Source LevelsThe control level sends state transition mes-
sages for a partition over the network, usingthe User Datagram Protocol, UDP [121], to thesource level in the single ROM inside the FCTScrate. In the source level, the transition messageis sent over VME to an FCTS module which for-wards it as a 104-bit 59.5 MHz serial word to allVME crates in the relevant partition. This serialword contains a 56-bit event time stamp (count-ing at 59.5 MHz), a 32-bit transition-specific wordand additional control bits. L1 Accept transitionsand calibration sequences, however, originate inthe source level and the same mechanism is usedto transmit them through the system.
The FCTS hardware receives the 24 L1 triggeroutput lines and eight additional external triggerlines. The FCTS crate is a 9U VME crate, with acustom P3 backplane on which all the trigger linesare bussed. For each partition, an FCTS modulereceives these lines. It is configurable with a bitmask specifying the trigger lines enabled for itspartition, and an optional prescale factor for eachline. A trigger decision is formed for the partitionby taking the logical OR of the enabled prescaledlines. Twelve of these modules are installed in thefull system, thus setting its maximum number ofpartitions. A detector system can belong to onlyone partition at a time.
The FCTS crate receives two timing signalsfrom the accelerator: a 476 MHz clock tied tothe RF structure of PEP-II and a 136 kHz fidu-cial that counts at the beam revolution fre-quency. The former is divided by eight to createa 59.5 MHz system clock. The fiducial is used tostart timing counters and to check the synchro-nization of the clocks.
There are two types of deadtime in the ODF
subsystem. The first arises from the minimum2.7µs spacing between L1 Accept transitions.This restriction simplifies the logic design of theFEE readout, because each signal in the silicontracker and drift chamber is thus associated withonly one L1 Accept. The FCTS hardware enforcesthis minimum separation between transitions, in-troducing an irreducible, yet minimal dead timeof 0.54% at 2 kHz.
The second type of deadtime arises when allFEE buffers are full and thus unable to acceptanother event. In a time required to be less thanthe inter-command spacing, each VME crate ina partition may send back a full signal indicat-ing that it is no longer able to process furtherL1 Accept transitions. The FCTS hardware de-tects these signals and disables triggering untilthe FEE are once again prepared to accept data.
An actual L1 Accept signal is only generatedfrom a partition’s trigger decision when neitherform of dead time is asserted.
12.2.2. Segment and Fragment LevelsThe segment and fragment levels reside in the
23 detector system VME crates. These are stan-dard 9U crates with a custom P3 backplane.
The 104-bit serial transition messages thatleave the source level are received by a FCTSmodule in each VME crate in a partition. Thismodule in turn forwards these messages to theROMs in the crate over the custom backplane,along with the 59.5 MHz system clock.
A ROM consists of four components (see Fig-ure 91), a commercial single-board computer(SBC) [122] and three custom boards. The cus-tom boards include: a controller card for receiv-ing FCTS commands and supporting FEE readsand writes; a personality card that transmits com-

99
P1
P2
P3
Front Panel
Personality Card
i960 Card
Controller Card
Single-board
FULL
59.5 MHz Clock
FCTS Transition Messages
Two bers to FEE
Two bers from FEE
Computer (SBC)
Figure 91. A ROM with a triggered personalitycard (TPC)
mands to and receives data from the FEE; and aPCI mezzanine card with a 33 MHz Intel i960 I/Oprocessor. The SBCs run the VxWorks [8] oper-ating system with custom code written in C++and assembly language.
There are two styles of personality cards in thesystem: triggered (TPC) and untriggered (UPC).UPCs are used only in the EMC system. UPCsaccept data continuously from the FEE into abuffer pipeline, at a rate of 3.7 MHz. From thesesamples EMC trigger information is derived andsent over a dedicated serial link to the triggerhardware, providing it with a continuous datastream. An L1 Accept causes up to 256 samplesof the raw data stream to be saved to an inter-mediate memory on the UPC.
A TPC (used in all other systems) reads outFEE data only when an L1 Accept signal is re-ceived, again saving it into an intermediate mem-ory. Each detector reads out data in a time win-dow around the trigger signal, large enough toallow for trigger jitter and detector time resolu-tion. For instance, this window is about 500 nswide for the SVT. The actual event time withinthis window is estimated in the L3 trigger soft-
Table 21Typical event sizes from detector systems
Hit Size Total Size OverheadDetector (bytes) (kB) (kB)
SVT 2 4.9 0.4DCH 10 4.8 0.2DIRC 4 3.1 0.3EMC 4 9.1 3.0IFR 8 1.2 0.2EMT — 1.2 < 0.1DCT — 2.7 0.1GLT — 0.9 < 0.1
Total 27.9 4.2
ware and then refined offline in the course of fullevent reconstruction.
FEE commands are sent and data receivedby the personality cards over uni-directional1.2 Gbits/s serial optical fiber links [123]. AllFEEs provide zero suppression in hardware ex-cept in the EMC and IFR. Data are transferredfrom the personality card to the SBC memory us-ing the i960 as a direct memory access (DMA)engine. This DMA runs at nearly the ideal133 Mbytes/s rate of the PCI bus.
The FEEs for various systems are able to bufferdata for three to five L1 Accept transitions. TheROM keeps track of the buffer occupancy andsends, when necessary, a full signal as previouslydescribed. The full condition is removed whenevent reading by the ROM frees sufficient bufferspace. This mechanism handles back pressurefrom any stage of the data acquisition throughto data logging by OEP.
The ODF application framework provides uni-form software entry points for the insertion of usercode at each level of the system. This capabilityis used primarily at the segment level, for FEEconfiguration and feature extraction. Table 21presents typical data contributions from each de-tector system and the trigger.
Data from the segment level ROMs in a crateare gathered by the fragment level ROM usinga chained sequence of DMA operations. Themaximum throughput of the fragment level eventbuilder is about 31 Mbits/s.

100
In calibrations, ODF may be operated in amode in which L1 Accept data are not transferredout of the segment level ROMs. This allows forcalibration data accumulation at high rates insidethe ROMs, not limited by the throughput of theevent builders or any downstream software. Com-pleted calibration results are computed, read out,and written to a database.
12.2.3. Event LevelFor each L1 Accept transition passing through
the ODF subsystem, all fragment ROM data aresent to one of the farm machines. The destinationis chosen by a deterministic calculation based onthe L1 Accept ’s 56-bit time stamp, available fromthe FCTS in each ROM. This technique producesa uniform quasi-random distribution and intro-duces no detectable inefficiency. Events sent to afarm machine still busy with a previous event areheld in a buffer to await processing.
All fragment data for an event are sent overthe switched 100 Mbits/s Ethernet event buildingnetwork to the selected farm machine. The con-nectionless UDP was chosen as the data trans-port protocol [124], allowing a flow control mech-anism to be tailored specifically to this applica-tion. Dropped packets are minimized by the net-work’s purely point-to-point, full duplex switchedarchitecture, and by careful tuning of the buffer-ing in the network switch and other parameters.The rare instance of packet loss is detected by theevent builder and the resulting incomplete eventis flagged.
The event level provides the standard softwareentry points for user code. During normal oper-ation, these are used only to transfer events viashared memory to the OEP subsystem for L3 trig-gering, monitoring, and logging.
12.2.4. System MonitoringIt is critical that the clocks of the FEEs stay
synchronized with the rest of the system. EachFEE module maintains a time counter which iscompared to the time stamp of each L1 Accept inorder to ensure that the system remains synchro-nized. If it becomes unsynchronized, a specialsynch command can be sent through the FCTS,causing all systems to reset their clocks.
To ensure that the data from the correct eventis retrieved from the FEEs, a five-bit counter is in-cremented and sent from the FCTS to the FEEswith each L1 Accept. These bits are stored inthe FEEs along with the data and are comparedon read-back. If they disagree, a special clear-readout command is sent which resynchronizesROM buffer pointers with FEE buffer pointers.
All transitions, including L1 Accept, are loggedin a 4 kbytes-deep by 20 byte-wide FIFO as theypass through the FCTS crate. The transitiontype, the event time stamp, a bit list of the triggerlines contributing to the decision, and the currentfull bit list from all VME crates are recorded inthis FIFO. There are also scalers which recorddelivered and accepted luminosity, deadtime dueto the 2.7 µs minimum inter-command spacing,deadtime caused by VME crates being full andtriggers on each line. These FIFOs and scalers areread out by the FCTS ROM, which then trans-mits the data to monitoring programs that calcu-late quantities such as luminosity, deadtime andtrigger rates. The UDP multicast protocol [125] isused to allow efficient simultaneous transmissionof data to multiple clients.
To provide diagnostics, a system which multi-casts additional performance information on de-mand from each CPU, typically at 1 Hz, is used.This information is currently received by a singleclient on one of the Unix application servers andarchived. It can be retrieved subsequently to in-vestigate any unusual behaviour observed in thesystem.
12.3. Online Event ProcessingThe online event processing (OEP) subsys-
tem provides a framework for the processing ofcomplete events delivered from the ODF eventbuilder [126]. The L3 software trigger operatesin this framework, along with event-based dataquality monitoring and the final stages of onlinecalibrations. Figure 92 shows the basic flow ofdata in the OEP subsystem.
The OEP subsystem serves as an adapter be-tween the ODF event builder interface and the ap-plication framework originally developed for theoffline computing system. Raw data deliveredfrom the ODF subsystem are put into an object-

101
oriented form and made available through thestandard event data analysis interface.
The use of this technique permits the L3 trig-ger and most of the data quality monitoring soft-ware to be written and debugged within the of-fline environment. This software is decomposedinto small, reusable units—modules, pluggablesoftware components in the framework—many ofwhich are shared among multiple applications.
The OEP interfaces allow user applications toappend new data blocks to the original raw datafrom ODF. The results of L3 event analysis arestored in this manner so that the trigger decisionand the tracks and calorimeter clusters on whichit is based may be used in later processing, such asreconstruction and trigger performance studies.
Histograms and other monitoring data are ac-cumulated across the farm. A distributed his-tograming package (DHP) [127] was developed toprovide networked clients with a single view ofhistograms and time history data. This data issummed across all nodes via CORBA-based com-munication protocols [128,129].
The fast monitoring system provides auto-mated comparisons of monitoring data againstdefined references. Statistical comparisons of livehistograms, or the results of fits to reference his-tograms, analytic spectra, or nominal values offit parameters may be performed at configurabletime intervals. Comparison failures, tagged withconfigurable severity levels based on the confi-dence levels of the comparisons, are displayed tooperators and logged in the common occurrencedatabase, described below.
The Java Analysis Studio (JAS) package [130]previously developed at SLAC was enhanced withthe ability to serve as a DHP client. It is used forviewing of monitoring data. This feature was im-plemented by devising a Java server that adaptsthe DHP protocol to the native JAS data proto-col.
In addition to the primary triggering and mon-itoring functions carried out on 32 online farmmachines, OEP provides a “trickle stream” pro-tocol that allows networked clients to subscribe toa sampling of the event data. This scheme pro-vides support for event displays and additionaldetailed data quality monitoring (“Fast Monitor-
ing”). A dedicated operator console supports theJAS-based data quality monitoring system. Thisconsole is used to display histograms from FastMonitoring and the L3 trigger processes, alongwith any error conditions detected by the auto-matic histogram analysis facility.
12.4. Data loggingEvents selected by the L3 trigger algorithms
in OEP are retained for subsequent full recon-struction. The events are sent from the 32 OEPnodes via TCP/IP to a single multithreaded pro-cess, the Logging Manager (LM), running on thelogging server. The LM writes these data toRAID storage arrays in a format specific to OEP.Data from all 32 nodes are combined into a sin-gle file for each data-taking run (typically two tothree hours of data acquisition, resulting in filesof about 15–20 Gbytes in size).
Completed data files are copied to the SLACHigh Performance Storage System (HPSS) [131]system for archiving to tape. Within eight hoursof data acquisition these files are retrieved fromHPSS for event reconstruction. The data files arealso retrievable for other tasks such as detectorsystem hardware diagnostics and offline tests ofthe L3 trigger algorithms.
12.5. Detector Control12.5.1. Design Principles
The Experimental Physics and Industrial Con-trol System, EPICS [7], was selected to providethe basis for the ODC subsystem. This providesdirect connection to the electrical signals of thepower supplies and other hardware, with suffi-cient monitoring and control to allow commission-ing, fault diagnosis, and testing. A summary ofmonitoring and control points is presented in Ta-ble 22.
Beyond the writing of custom drivers, only mi-nor additions or changes were required to EPICS.EPICS and the additional BABAR-specific soft-ware are written in the C language.
Detector-wide standard hardware was adoptedto ease development and maintenance. The stan-dard ODC crate is a 6U VME chassis contain-ing a single board computer [132] serving as anEPICS input/output controller (IOC). Fifteen

102
DataFlow(crates)
EL L3
EL L3
EL L3
LM
Disk array
DHPReq
32 OEP farm nodes
LoggingServer
FM FarmNode
JASSrvr
JASDisp
JASDisp
EvtDisp
Appl. Servers
ConsolesDHP CORBA protocolJAS RMI protocol
Trickle stream event data
(various event data protocols) 3-2001 8583A48
Figure 92. Flow of data in the OEP subsystem: ODF event level (EL) and L3 trigger processes oneach OEP node; the Logging Manager (LM) on the logging server; the DHP “requestor” process thatcombines histograms from all 32 L3 processes; one instance of a Fast Monitoring (FM) process with DHPhistograms; the Java server that makes DHP histograms available to JAS clients; two such clients, andone event display for the L3 trigger. OEP-specific data transport protocols are identified.
Table 22ODC Distribution by system of approximately 12,000 recorded monitor channels
SVT DCH DIRC EMC IFR Central
Radiation Dose 12 8 22 116 — —Data Rate — — 12 — 1612 20Temperature 208 87 36 506 146 100Humidity 4 5 12 7 — — 2Magnetic Field — — 8 — — — 50Position 30 22 — — — —Gas System 4 115 12 1 32 —Fluid System 20 2 18 18 20 90Liquid Source — — — 12 — 3HV System 2080 1299 672 24 1574 —LV System (non-VME) — 62 1080 442 94 —VME Crates 5 2 12 12 8 1500CAN Micro Controller 48 40 3 47 45 —Finisar Monitor 28 12 12 — — —
System Totals 2439 1654 1899 1185 3531 1765

103
such crates are used in the experiment. EPICSis fully distributed. For example, each IOC sup-plies its own naming service, notify-by-exceptionsemantics, and processing. The IOCs boot froma dedicated server.
Analog data are either digitized by moduleswithin the crates or, more commonly, on digitizerboards located directly on the detector. In thelatter case, the CANbus standard [133] is usedfor the transport of signals to and from the de-tector. A custom “general monitoring board”(GMB) [134] was developed to interface CANbusto the on-detector electronics. The GMB containsa microcontroller, an ADC, multiplexors, and op-erational amplifiers. It can digitize up to 32 sig-nals.
12.5.2. User InterfaceThe operator view of this part of the control
system is via screens controlled by the EPICS dis-play manager (DM). Dedicated control and dis-play panels were developed using DM for each ofthe detector systems, using common color rulesto show the status of devices. A top-level panelfor ODC summarizes the status of all systems andprovides access to specialized panels.
The EPICS alarm handler with some BABAR-specific modifications is used to provide oper-ators with audible and color-coded alarms andwarnings in a hierarchical view of all the systemsand components. Conditions directly relevant topersonnel or detector safety are further enforcedby hardware interlocks, the status of which arethemselves displayed in a set of uniform EPICSscreens, in the alarm handler, and on an alarmannunciator panel.
12.5.3. Interfaces to OtherBABAR Software
A custom C++ layer above EPICS consistingof Component Proxies and Archivers provides fordevice-oriented state management and archivaldata collection. This is ODC’s interface to therest of the online system.
The 27 component proxies (CPs), running ona Unix application server, each define a logicalcomponent representing some aspect of a detec-tor system or the experiment’s central support
systems, aggregated from the <∼ 105 individualEPICS records.
The CPs present a simple finite state ma-chine model as their interface to Run Control.The most important actions available are Config-ure, on which the CP accesses the configurationdatabase, retrieving set points for its component’schannels, and Begin Run, which puts the CP intothe Running state, in which setpoint changes areprohibited and readbacks are required to matchsettings. While in the Running state, the CPmaintains a Runnable flag which reflects that re-quirement and allows Run Control to ensure thatdata acquisition is performed only under satisfac-tory conditions.
The CP’s other principal function is to providean interface for the rest of the online system tothe ambient data collected by ODC on the stateof the detector hardware and its environment. Itis the task of the archiver processes, each pairedwith a CP, to collect the ambient data, aggregatethem and write out histories approximately ev-ery hour to the ambient database. These recordeddata are associated with times so that they maybe correlated with the time stamps of the eventdata. Data from the archiver processes or fromthe database may be viewed with a custom graph-ical browser.
Ambient data typically vary only within a nar-row noise range or dead-band. The storage ofunnecessary data is avoided by recording onlythose monitored quantities which move outside ofa per-channel dead-band range or across an alarmthreshold.
12.5.4. Integration With the AcceleratorClose integration between the BABAR detector
and the PEP-II accelerator is essential for safeand efficient data collection. Data from the accel-erator control system are transferred via EPICSchannel access to BABAR for display and storage,managed by a dedicated CP. In turn, backgroundsignals from the detector are made available toPEP-II to aid in injection and tuning, minimiz-ing backgrounds, and optimizing integrated lu-minosity. An important component of this com-munication is the “injection request” handshake.When the PEP-II operator requests a significant

104
change in the beam conditions, such as injection,the request can only procede following confirma-tion from BABAR. This procedure complementsthe safety interlocks based on radiation dose mon-itors.
12.5.5. Operational ExperienceThe ODC subsystem has been operational since
the initial cosmic-ray commissioning of the detec-tor and the beginning of data-taking with col-liding beams. The core EPICS infrastructurehas proven to be very robust. The large sizeof the subsystem, with its 15 IOCs and <∼ 105
records, produces heavy but manageable trafficon the experiment’s network. The rate of datainto the ambient database averages 4.6 Mbytes/hror 110 Mbytes/day.
12.6. Run ControlThe ORC subsystem is implemented as an ap-
plication of SMI++, a toolkit for designing dis-tributed control systems [135]. Using this soft-ware, the BABAR experiment is modeled as a col-lection of objects behaving as finite state ma-chines. These objects represent both real entities,such as the ODF subsystem or the drift chamberhigh voltage controller, and abstract subsystemssuch as the “calibrator,” a supervisor for the co-ordination of online components during detectorcalibration. The behavior of the objects are de-scribed in a specialized language (SML) which isinterpreted by a generic logic engine to implementthe control system.
The SML descriptions of the objects whichmake up the experiment simply specify their ownstates and transitions as well as the connectionsbetween the states of different objects. Ob-jects perform actions on state transitions, whichmay include explicitly commanding transitions inother objects; objects may also be programmedto monitor and automatically respond to changesof state in other objects. Anticipated error con-ditions in components of the online system arereflected in their state models, allowing many er-rors to be handled automatically by the system.To reduce complexity, logically related objects aregrouped together into a hierarchy of cooperatingdomains.
The system is highly automated; user input isgenerally required only to initialize the system,start and stop runs, and handle unusual errorconditions. The user communicates with ORCvia a configurable Motif-based GUI included inSMI++.
The states and behavior of ORC objects repre-senting external systems are provided by a spe-cial class of intermediate software processes calledproxies. A proxy monitors its system, providesan abstraction of it to ORC, and receives statetransition commands. These commands are in-terpreted and applied to the underlying hardwareor software components, implementing the tran-sitions’ actions. The control level of an ODF par-tition is an example of such a proxy.
Communication between the various proxiesand the ORC engines is provided by DIM [136],a fault tolerant “publish and subscribe” commu-nications package based on TCP/IP sockets, al-lowing ORC to be distributed transparently overa network.
Essential to the operation of the online sys-tem is the notion of the Runnable status of itsvarious ODC and data acquisition components,indicating that they are in a state suitable forproduction-quality data-taking. The ORC logicinterlocks data-taking to the logical AND of allcomponents’ Runnable status. Whenever thiscondition is not satisfied, data-taking may notstart and any existing run will be paused withan alert sent to the operator.
12.7. Common Software Infrastructure12.7.1. Databases
Five major databases are used by the onlinesystem:
1. Configuration Database: This database, im-plemented using the commercial object-orienteddatabase management system Objectivity [6], al-lows the creation of hierarchical associations ofsystem-specific configuration data with a singlenumeric configuration key. This key is distributedto all online components, which can then use itto retrieve from the database all the configurationinformation they require. Convenient mnemonicsare associated with the keys for currently rele-vant configurations, and may be selected for use

105
via the ORC GUI [137].2. Conditions Database: The Conditions
Database is used to record calibration and align-ment constants, and the configuration keys inforce during data-taking runs. It has the addi-tional feature that the data for a given time in-terval may be updated as they are refined in thecourse of improved understanding of the appara-tus [138].
The Configuration and Conditions Databasesare both made available for reconstruction andphysics analysis.
3. Ambient Database: The Ambient Databaseis used principally by the ODC subsystem torecord detector parameters and environmentaldata at the time they are measured [137].
Both the Ambient and Conditions databases,are implemented using Objectivity, and are basedon the notion of time histories of various dataassociated with the experiment. The history foreach item is divided into intervals over which aspecific value is consistent.
4. Occurrence (Error) Log: Informational anderror messages generated in the online systemare routed through the CMLOG system [139] toa central database, from which they are avail-able for operators’ realtime viewing or historicalbrowsing, using a graphical tool, as well as forsubscription by online components which may re-quire notification of certain occurrences.
5. Electronic Logbook: An Oracle-based [140]logbook is used to maintain the history of thedata-taking, organized by runs. It contains infor-mation on beam parameters—instantaneous andintegrated luminosity, currents, and energies—as well as records of data acquisition parame-ters such as trigger rates, data volumes, and deadtimes, and the detector configuration used for arun. The logbook also contains text commentsand graphics added by the operations staff.
A number of other databases are used in theonline system for various tasks such as indexinglogged data files, the repair history of online hard-ware and spares, and software problem reports.
12.7.2. Software Release Controland Configuration Management
All of the online software is maintained in thecommon BABAR code repository, based on thefreely available Concurrent Versions System soft-ware, CVS [141].
The online’s Unix and VxWorks applicationsare built and maintained with an extension of thestandard BABAR software release tools [142]. Atthe start of every data-taking run, the identitiesof the current production software release and anyinstalled patches are recorded; thus it is possibleat a later date to reconstruct the versions of onlinesoftware used to acquire data.
12.8. Summary and OutlookThe online system has exceeded its data acqui-
sition performance goals. It is capable of acquir-ing colliding beam events, with an average sizeof 28 kbytes, at a ∼ 2500 Hz L1 trigger rate andreducing this rate in L3 to the required ∼ 120 Hzlimit. This provides comfortable margins, sinceunder normal beam conditions the L1 trigger rateis 800–1000Hz.
The system is capable of logging data at muchhigher rates; the nominal 120 Hz figure representsa compromise between data volume and its con-sequential load on downstream processing andarchival storage, and trigger efficiency for lowmultiplicity final states.
During normal data-taking, the online systemroutinely achieves an efficiency of over 98%, tak-ing both data acquisition livetime and the sys-tem’s overall reliability into account.
There are several hardware options for enhanc-ing ODF capacity. Currently most ROMs receivemore than one fiber from the FEE. These fiberscould be distributed over more ROMs to add pro-cessing power. There are also commercial up-grade paths for the ROMs’ SBC boards available.Crates can be split (up to a maximum total of 32)to create more VME event building bandwidth, aswell as more fragment level CPU power and net-work bandwidth. Gigabit Ethernet connectionscould also be installed to improve the networkevent builder’s bandwidth.
Various software upgrade options are beinginvestigated, including optimizing the VxWorks

106
network drivers and grouping sets of events to-gether in order to reduce the impact of per-eventoverhead.
Current background projections indicate thatfragment level CPU, segment level memory busbandwidth, and network event building band-width are the most likely bottlenecks for futurerunning.
Increases in the L1 trigger rate or in the back-ground occupancy and complexity of events areexpected to necessitate additional capacity forOEP, principally for L3 triggering. The onlinefarm machines could be replaced with faster mod-els. More machines could be added, at the ex-pense of increases in coherent loading on variousservers and of additional management complex-ity.
No significant capacity upgrades to the datalogging subsystem or to ODC are foreseen at thistime.
13. Conclusions
During the first year of operation, the BABAR
detector has performed close to expectation witha high degree of reliability. In parallel, the PEP-IIstorage rings gradually increased its performanceand towards the end of the first year of data-taking routinely delivered close to design luminos-ity. In fact, the best performance surpassed thedesign goals, both in terms of instantaneous aswell as integrated luminosity per day and month.Of the total luminosity of 23.5 fb−1 delivered byPEP-II during the first ten months of the year2000, BABAR logged more than 92%. The dataare fully processed with a delay of only a fewhours. They are of very high quality and havebeen extensively used for physics analysis.
A large variety of improvements to theevent reconstruction and detailed simulation arepresently being pursued. They include improve-ments in many aspect of the calibration and re-construction procedures and software, for exam-ple, the calibration and noise suppression in theEMC, and the development of techniques for pre-cision alignment of the SVT and DCH. The lattereffort will not only benefit the overall efficiencyand precision of the track reconstruction, it will
also improve the matching of tracks with signalsin the DIRC and EMC. Detailed studies and thefull integration of all available information per-tinent to the identification of charged and neu-tral particles are expected to result in better un-derstanding and improved performance of varioustechniques.
Beyond routine maintenance, minor upgradesand a few replacements of faulty components arecurrently planned. They include the replacementof SVT modules that are expected to fail in thenext few years due to radiation damage, plus afew others that cannot be correctly read out dueto broken connections. A large fraction of theRPCs are showing gradually increasing losses inefficiency and plans are being developed for thereplacement of the RPC modules over the nextfew years. Furthermore, 20-25 cm of absorber willbe added to the flux return to reduce the hadronmisidentification rates.
With the expected increase in luminosity,machine-induced backgrounds will rise. Measuresare being prepared to reduce the sources and theimpact of such backgrounds on BABAR. Apartfrom the addition of shielding against shower de-bris, upgrades to the DCH power supply systemand to the DIRC electronics are presently underway. Most important are upgrades to the trigger,both at levels L1 and L3. Specifically, the DCHstereo layer information will be added to allow fora more efficient suppression of background tracksfrom outside the luminous region of the beam.The L3 processing will be refined so as to rejectboth backgrounds and high rate QED processeswith higher efficiency. In addition, data acquisi-tion and processing capacity will be expanded tomeet the demands of higher luminosity.
In summary, the BABAR detector is perform-ing very well under current conditions and is wellsuited to record data at significantly higher thandesign luminosity.
Acknowledgements
The authors are grateful for the tremendoussupport they have received from their home in-stitutions and supporting staff over the past sixyears. They also would like to commend their

107
PEP-II colleagues for their extraordinary achieve-ment in reaching the design luminosity and highreliability in a remarkably short time. The col-laborating institutions wish to thank SLAC forits support and kind hospitality.
This work has been supported by the US De-partment of Energy and the National ScienceFoundation, the Natural Sciences and Engineer-ing Research Council (Canada), the Institute ofHigh Energy Physics (P.R. China), le Commis-ariat a l’Energie Atomique and Institut Nationalde Physique Nucleaire et de Physique des Par-ticules (France), Bundesministerium fur Bildungund Forschung (Germany), Istituto Nazionale diFisica Nucleare (Italy), the Research Council ofNorway, the Ministry of Science and Technol-ogy of the Russian Federation, and the Par-ticle Physics and Astronomy Research Council(United Kingdom). In addition, individuals havereceived support from the Swiss National Foun-dation, the A.P. Sloan Foundation, the ResearchCorporation, and the Alexander von HumboldtFoundation.
REFERENCES
1. PEP-II - An Asymmetric B Factory, Con-ceptual Design Report, SLAC-418, LBL-5379(1993).
2. The BABAR Collaboration, Letter of Intent forthe Study of CP Violation and Heavy FlavorPhysics at PEP-II, SLAC-443 (1994).
3. BABAR Technical Design Report, SLAC-R-457 (1995).
4. The BABAR Physics Book, Physics atan Asymmetric B Factory, P.F. Harrison,H.R. Quinn, Editors, SLAC-R-504 (1998).
5. The Physics Program of a High-LuminosityAsymmetric B Factory at SLAC, SLAC-353 (1989); Proceedings of the Workshop onPhysics and Detector Issues for a High Lu-minosity Asymmetric B Factory at SLAC,SLAC-373 (1991).
6. Objectivity, Inc., Mountain View, CA, USA.7. L. Dalesio et al., Nucl. Instr. Methods A352
(1994) 179.8. The VxWorks realtime operating system and
Tornado Development interface, Wind River
Systems, Inc., Alameda, CA, USA.9. T. Glanzman et al., The BABAR Prompt
Reconstruction System, Proceedings of theInternational Conference on Computing inHigh Energy Physics, Chicago, USA (1998).F. Safai Tehrani, The BABAR Prompt Recon-struction Manager: A Real Life Example of aConstructive Approach to Software Develop-ment, submitted to Computer Physics Com-munications (2000).
10. J. Seeman et al., The PEP-II Storage Rings,SLAC-PUB-8786 (2001), submitted to Nucl.Instr. and Methods .
11. J. Seeman et al., Status Report on PEP-IIPerformance, Proceeedings of the 7th Euro-pean Particle Accelerator Conference (EPAC2000), Vienna, Austria (2000).
12. M. Sullivan, B-Factory Interaction RegionDesigns, Proceedings of the IEEE ParticleAccelerator Conference (PAC97), Vancouver,B.C., Canada (1997), SLAC-PUB-7563.
13. S.E. Csorna et al., (CLEO Collaboration),Phys. Rev. 61 (2000) 111101.
14. T. Mattison et al., Background Measure-ments during PEP-II Commissioning, Pro-ceedings of the IEEE Particle AcceleratorConference (PAC99), New York, NY, USA(1999).
15. W. Kozanecki, Nucl. Instr. Methods A446(2000) 59.
16. C. Hast et al., Report of the High-LuminosityBackground Task Force, BABAR Note 522(2000).
17. T.I. Meyer et al., Contribution to DPF 2000,Meeting of the Division of Particles and Fieldsof the American Physical Society, Columbus,OH, USA (2000).
18. B. Camanzi, et al., Nucl. Instr. Methods A457 (2001) 476.
19. F.Kircher, et al., IEEE Transactions on Ap-plied Superconductivity, 9 #2 (1999) 847.
20. Opera-2D, Vector Fields, Inc., Aurora, IL,USA; ANSYS by ANSYS Inc., Canonsburg,PA, USA; Mermaid ( c©1994) by Sim Limited,Novosibirsk, Russia.
21. A. Onuchin et al., Magnetic Field Calcula-tion in the BABAR Detector, BABAR Note 344(1996).

108
22. L. Keller et al., Magnetic Field Calculation inthe BABAR Detector, BABAR Note 370 (1997).
23. Kawasaki Heavy Industries (KHI), Kobe,Japan.
24. Europa Metali SpA, Fornaci di Barga, Italy.Alcatel Swiss Cable (now Nexans), Cortail-lod, Switzerland.
25. Solenoid cool-down and cryogenic Helium issupplied by a modified Linde TCF-200 lique-fier/refrigerator.
26. Ansaldo Energia, Genova, Italy.27. The solenoid was shipped from Genova on a
C5-B transport plane of the US Air Force.28. E. Antokhin et al., Nucl. Instr. Methods A432
(1999) 24.29. C. Newman-Holmes, E.E. Schmidt, R. Ya-
mada, Nucl. Instr. Methods A274 (1989) 443.30. Sentron model 2MR-4A/3B-14B25-20 (2-
element) and, AMR-3B-14B25-20 (1-element)Hall Probes, GMW Associates, San Carlos,CA, USA.
31. Metrolab model PT 2025 Telsameter withmodel 1060 NMR probe, Metrolab Instru-ments, SA, CH-1228, Geneva, Switzerland.
32. A. Boyarski et al., Field Measurements in theBABAR Solenoid, BABAR Note 514 (2000).
33. UBE Industries, Japan. see also [34]34. C. Bozzi et al., Nucl. Instr. Methods A447
(2000) 20.35. D. Barbieri et al., Nuo. Cim. A112 (1999) 113.36. MICRON Semiconductor Ltd., Lancing, U.K.37. L. Bosisio, INFN Trieste, Italy, private com-
munication.38. G. Della Ricca et al., Nucl. Instr. Methods
A409 (1998) 258.39. V. Re et al., Nucl. Instr. Methods A409
(1998) 354.40. J. Beringer et al., The Data Transmission Sys-
tem for the BABAR Silicon Vertex Tracker,BABAR Note 518 (2000).
41. R. Claus et al., SLAC-PUB-8134 (1999).42. CAEN, Costruzioni Apparecchiature Elet-
troniche Nucleari, Viareggio, Italy.43. Medelec Mechanical, Puidoux, Switzerland.44. Celenex 3300-2 polyester thermoplastic with
30% silica glass fiber.45. E. Borsato et al., Nucl. Instr. Methods A451
(2000) 414.
46. Luma Metall AB, Kalmar, Sweden.47. California Fine Wire, Grover Beach, CA,
USA.48. A. Berenyi et al., IEEE Trans. Nucl. Sci. 46
(1999) 348; ibid. 46 (1999) 928.49. J. Albert et al., IEEE Trans. Nucl. Sci. 46
(1999) 2027; A. Bouchan et al., Nucl. Instr.Methods A409 (1998) 46; G. Sciolla et al.,Nucl. Instr. Methods A419 (1998) 310.
50. D. Dorfan et al., Nucl. Instr. Methods A409(1998) 310.
51. S.F. Dow et al., IEEE Trans. Nucl. Sci. 46(1999) 785.
52. Y. Karyotakis, D. Boutigny, LAPP Annecy,France, private communication.
53. Garfield: Simulation of Gaseous Detectors,CERN Program Library (1992).
54. P. Billoir, Nucl. Instr. Methods A225 (1984)225.
55. D.N. Brown, E.A. Charles, D.A. Roberts, TheBABAR Track Fitting Algorithm, Proceedingsof CHEP 2000, Padova, Italy (2000).
56. B.N. Ratcliff, SLAC-PUB-5946 (1992); B. N.Ratcliff, SLAC-PUB-6067 (1993); P. Coyle etal., Nucl. Instr. Methods A343 (1994) 292.
57. Spectrosil is a trademark of TSL Group PCL,Wallsend, Tyne on Wear, NE28 6DG, Eng-land; Sold in the USA by Quartz ProductsCo., Louisville, KY, USA.
58. I. Adam et al., IEEE Trans. Nucl. Sci.45 No. 3 (June) 657; I. Adam et al.,ibid 450; J. Cohen-Tanugi, M. C. Convery,B. N. Ratcliff, X. Sarazin, J. Schwiening,J. Va’vra, SLAC-JOURNAL-ICFA-21, ICFAInstrumentation Bulletin, Fall 2000 Issue.
59. M. Benkebil et al., Nucl. Instr. Methods A442(2000) 364.
60. Boeing Optical Fabrication, Albuquerque,NM, USA.
61. Electron Tubes Limited (formerly: ThornEMI Electron Tubes), Ruislip, Middlesex,England.
62. P. Bourgeois, M. Karolak, G. Vasseur, Nucl.Instr. Methods A442 (2000) 105.
63. Epoxy Technology, Inc., Billerica, MA, USA.64. J. Va’vra, Nucl. Instr. Methods A453 (2000)
262.65. P. Bailly et al., Nucl. Instr. Methods A432

109
(1999) 157.66. J. Ardelean et al., LAL-RT-97-04 (1997).67. P. Bailly et al., Nucl. Instr. Methods A433
(1999) 432.68. The micro-controller is a MC68HC05x32, Mo-
torola Inc., Schaumburg, IL, USA.69. I. Adam et al., SLAC-PUB-8783 (2001), to be
published in IEEE Trans. Nucl. Sci.70. R. Aleksan et al., Nucl. Instr. Methods A397
(1997) 261.71. T. Swarnicki, Performance of the CLEO-II
CsI(Tl) Calorimeter, Proceedings of Work-shop on B Factories, Stanford, CA, USA(1992).
72. R.J. Barlow et al., Nucl. Instr. Methods A420(1999) 162.
73. Aldrich-APL, Urbana, IL, USA. ChemetallGmbH, Frankfurt, Germany.
74. Shanghai Institute of Ceramics, Shanghai,P.R.China; Beijing Glass Research Institute,Beijing, P.R.China; Hilger Analytical, Mar-gate, Kent, UK; Crismatec, Nemours, France;Amcrys-H, Kharkov, Ukraine.
75. TYVEK, registered trademark of E.I. DuPontde Nemours & Co., Wilmington, DE, USA.
76. G. Dahlinger, Aufbau und Test einesKalorimeter-Prototyps aus CsI(Tl) zurEnergie- und Ortsmessung hochenergetis-cher Photonen, Ph.D Thesis, TechnischeUniversitat Dresden, Germany, (1998).
77. EPILOX A17-01 manufactured by LeunaerHarze GmbH, Leuna, Germany.
78. J. Brose, G. Dahlinger, K.R. Schubert, Nucl.Instr. Methods A417 (1998) 311;C. Jessop et al., Development of Front EndReadout for the BABAR CsI(Tl) Calorimeter,BABAR Note 216 (1995);C. Jessop et al., Development of Direct Read-out for CsI Calorimeter, BABAR Note 270(1995).
79. NE-561 manufactured by Nuclear Enter-prises, Sighthill, Edinburgh, Scotland.
80. The calibration procedure employed in thismeasurement introduces a dependency of thelight yield on the shaping time of the pream-plifier. When connected to the actual front-end electronics in the BABAR detector, thesignal is reduced by a factor 1.29.
81. Fluorinert (polychlorotrifluoro-ethylene) ismanufactured by 3M Corporation, St. Paul,MN, USA.
82. S-2744-08 PIN diode by Hamamatsu Photon-ics, K. K., Hamamatsu City, Japan. Dark cur-rent < 5 nA, capacitance < 105 pF at thedepletion voltage of 70 V.
83. J. Harris, C. Jessop, Performance Testsof Hamamatsu 2774-08 Diodes for theBABAR Electromagnetic Calorimeter FrontEnd Readout and Proposal for Reliability Is-sues, BABAR Note 236 (1995).
84. G. Haller, D Freytag, IEEE Trans. Nucl. Sci.43 (1996) 1610.
85. C. Jessop, Reliability Issues for the BABAR
CsI(Tl) Calorimeter Front End Readout,BABAR Note 217 (1995).
86. S. Menke, Offline Correction of Non-Linearities in the BABAR ElectromagneticCalorimeter, BABAR Note 527 (2000).
87. F. Gaede, D. Hitlin, M. Weaver, The Radioac-tive Source Calibration of the BABAR Elec-tromagnetic Calorimeter, BABAR Note 531(2001);J. Button-Shafer et al., Use of RadioactivePhoton Sources with the BABAR Electromag-netic Calorimeter, BABAR Note 322 (1996).
88. R. Muller-Pfefferkorn, Die Kalibration deselektromagnetischen CsI(Tl)-Kalorimetersdes BABAR-Detektors mit Ereignissen derBhabha-Streuung, Ph.D Thesis, TUD-IKTP/01-01, Technische Universitat Dres-den, Germany (2001).
89. GEANT Detector Description and Simulationtool, CERN Program Library, Long WriteupW5013 (1994).
90. S. Menke et al., Calibration of the BABAR
Electromagnetic Calorimeter with π0s,BABAR Note 528 (2000).
91. J. Bauer, Kinematic Fit for the EMC Ra-diative Bhabha Calibration, BABAR Note 521(2000).
92. M. Kocian, Das Lichtpulsersystem deselektromagnetischen CsI(Tl)-Kalorimetersdes BABAR-Detektors, Ph.D Thesis, TUD-IKTP/00-03, Technische Universitat Dres-den, Germany (2000).
93. P.J. Clark, The BABAR Light Pulser System,

110
Ph.D Thesis, University of Edinburgh, UK(2000);B. Lewandowski, Entwicklung und Aufbaueines Lichtpulsersystems fur das Kalorime-ter des BABAR-Detektors, Ph.D Thesis, Ruhr-Universitat Bochum, Germany (2000).
94. B. Brabson et al., Nucl. Instr. Methods A332(1993) 419.
95. S. Otto, Untersuchungen zur Ortsrekonstruk-tion electromagnetischer Schauer, Diplomar-beit, Technische Universitat Dresden, Ger-many (2000).
96. R. Santonico, R. Cardarelli, Nucl. Instr.Methods A187 (1981) 377.
97. F. Anulli et al., Nucl. Instr. Methods A409(1998) 542.
98. A. Calcaterra et al., Performance of theBABAR RPCs in a Cosmic Ray Test, Proceed-ings of the International Workshop on Resis-tive Plate Chambers and Related Detectors,Naples, Italy (1997).
99. N.Cavallo et al., Nucl. Phys. B(Proc. Suppl.)61B (1998) 545; N. Cavallo et al., Nucl. Instr.Methods A409 (1998) 297.
100.HV system SY-127, Pod Models A300-P andA300-N by CAEN, Viareggio, Italy.
101.G. Crosetti et al., Data Acquisition Systemfor the RPC Detector of BABAR Experiment,Proceedings of the International Workshop onResistive Plate Chambers and Related Detec-tors, Naples, Italy (1997).
102.J. Christiansen, 32-Channel TDC with On-chip Buffering and Trigger Matching, Pro-ceedings of Electronics for LHC experiments,London, UK (1997) 333. S. Minntoli andE. Robutti, IEEE Trans. Nucl. Sci. 47 (2000)147.
103.P. Paolucci, The IFR Online Detector ControlSystem, SLAC PUB-8167 (1999).
104.L. Lista, Object Oriented ReconstructionSoftware for the IFR Detector of BABAR Ex-periment, Proceedings of the Conference onComputing in High Energy Physics, Padova,Italy (2000).
105.A. Zallo et al., Nucl. Instr. Methods A456(2000) 117.
106.A. Berenyi et al., IEEE Trans. Nucl. Sci. 46(1999) 2006.
107.A. Berenyi et al., IEEE Trans. Nucl. Sci. 46(1999) 348.
108.A. Berenyi et al., IEEE Trans. Nucl. Sci. 46(1999) 928.
109.A. Berenyi et al., Nuclear Science Sympo-sium, Conference Record 2 (1998) 988.
110.ORCA 2C series, Lucent Technologies, Berke-ley Heights, NJ, USA.
111.K. Kinoshita, Nucl. Instr. Methods A276(1989) 242.
112.Xilinx 4020E, Xilinx Inc., Mountain View,CA, USA.
113.P. D. Dauncey et al., Design and Performanceof the Level 1 Calorimeter Trigger for theBABAR Detector, to be published in IEEETrans. Nucl. Sci. (2001).
114.G.C. Fox, S. Wolfram, Nucl. Phys. B149(1979) 413.
115.Sun Ultra 5, with single 333 MHzUltraSPARC-IIi CPUs and 512 Mbytesof RAM, Sun Microsystems, Inc., Palo Alto,CA, USA.
116.Cisco model 6500, Cisco Systems, Inc., SanJose, CA, USA.
117.A single Sun Microsystems Ultra Enter-prise 450, with four 300 MHz CPUs, 2 Gbytesof RAM, and 720 Gbytes of RAID-3 disk, actsas the data logging server as well as the ODFboot server. Beginning in 2001 all its respon-sibilities other than data logging were movedto a new Sun Ultra 220R machine with dual450 MHz UltraSPARC-II CPUs, 1 Gbytes ofRAM, and an additional 200 Gbytes RAID ar-ray.
118.These file and database servers (presentlyfive) are primarily additional Sun Ul-tra 220Rs, each with about 200 Gbytes ofRAID disk. The ten application servers area mix of Sun Ultra 60s, with dual 360 MHzUltraSPARC-II CPUs and 1 Gbytes of RAM,and Ultra 5s; the console servers are all Ul-tra 5s.
119.R. Claus et al., Development of a DataAcquisition System for the BABAR CPViolation Experiment, Proceedings ofthe 11th IEEE NPSS RealTime Con-ference, Santa Fe, NM, USA (1999),http://strider.lansce.lanl.gov/-

111
rt99/index11.html.120.P. Grosso et al., The BABAR Fast Control Sys-
tem, Proceedings of the International Confer-ence on Computing in High-Energy Physics,Chicago, IL, USA (1998).
121.J. Postel, User Datagram Protocol, RFC-0768(1980); Internet documentation including allRFCs (Requests for Comment) are availableonline from the Internet Engineering TaskForce, http://www.ietf.org.
122.Motorola model MVME2306 boards, eachwith a 300 MHz PowerPC 604 CPU,32 Mbytes of RAM, 5 Mbytes of non-volatileflash memory, two PCI mezzanine card slots(only one of which is currently used), a100 Mbits/s Ethernet interface, and a TundraUniverse II VME interface, Motorola Inc.,Tempe, AZ, USA.
123.G-Link, Giga-bit Transmit/Receive Chip SetHDMP-1012/HDMP-1014, Hewlett-Packard,Inc., Palo Alto, CA, USA.
124.T.J. Pavel et al., Network Performance Test-ing for the BABAR Event Builder, Proceedingsof the CHEP Conference, Chicago, IL, USA(1998).
125.S. Deering, Host Extensions for IP Multicas-ting, RFC-1112 (1989).
126.G. P. Dubois-Felsmann, E. Chen, Yu.Kolomensky et al., IEEE Trans. Nucl. Sci. 47(2000) 353.
127.S. Metzler, et al., Distributed Histogram-ming, Proceedings of the International Con-ference on Computing in High EnergyPhysics, Chicago, IL, USA (1998).
128.CORBA (Common Object Request BrokerArchitecture) Standards, Object Manage-ment Group, http://www.corba.org/.
129.ACE/TAO CORBA implementation, Dis-tributed Object Computing Group, Wash-ington University, St. Louis, Missouri,USA and University of California, Irvine,CA, USA, http://www.cs.wustl.edu/-
schmidt/TAO.html.130.T.Johnson, Java Analysis Studio, Proceedings
of the International Conference on Comput-ing in High Energy Physics, Padova, Italy(2000).
131.High Performance Storage System (HPSS),
International Business Machines, Inc., Ar-monk, NY, USA.
132.The ODC IOCs are model MVME177 boardswith MC68060 CPUs from Motorola Com-puter Group, op. cit..
133.Controller area network (CAN) for high-speed communication (1993); ISO standards:11519 Road vehicles (Low-speed serial datacommunication) (1994); 11898, Road ve-hicles (Interchange of digital information),http://www.iso.ch/.
134.T. Meyer, R. McKay, The BABAR GeneralMonitoring Board, BABAR Note 366 (1998).
135.B. Franek, C. Gaspar, IEEE Trans. Nucl. Sci.45 (1998) 1946.
136.C. Gaspar, M. Donszelman, DIM - A Dis-tibuted Information Management System forthe DELPHI experiment at CERN, Pro-ceedings of the IEEE Eighth Conference onReal-Time Computer Applications in Nu-clear, Particle and Plasma Physics, Vancou-ver, Canada (1993).
137.G. Zioulas, et al., Ambient and Configurationdatabases for the BABAR online system, Pro-ceedings of the IEEE Real Time Conference,Santa Fe, NM, USA (1999).
138.I. Gaponenko, et al., An Overview of theBABAR Conditions Database, Proceedings ofthe International Conference on Computingin High Energy Physics, Padova, Italy (2000).
139.cdev and CMLOG are software facilities pro-duced by the Accelerator Controls groupof the Thomas Jefferson National Accelera-tor Facility. Documentation is available fromtheir Web site, http://www.cebaf.gov/.
140.Oracle Corporation, Redwood Shores, CA,USA.
141.The Concurrent Versions System is an open-source distributed version control system,http://www.cvshome.org/.
142.BABAR Software Release Tools,http://www.slac.stanford.edu/-
BFROOT/www/doc/workbook/srt1/srt1.html.

arX
iv:h
ep-e
x/01
0504
4 v1
16
May
200
1
SLAC-PUB-8569BABAR-PUB-01/08
April, 2001
The BABAR Detector
The BABAR Collaboration
Abstract
BABAR, the detector for the SLAC PEP-II asymmetric e+e− B Factory operating at the Υ (4S) resonance,was designed to allow comprehensive studies of CP -violation in B-meson decays. Charged particle tracksare measured in a multi-layer silicon vertex tracker surrounded by a cylindrical wire drift chamber.Electromagentic showers from electrons and photons are detected in an array of CsI crystals located justinside the solenoidal coil of a superconducting magnet. Muons and neutral hadrons are identified by arraysof resistive plate chambers inserted into gaps in the steel flux return of the magnet. Charged hadrons areidentified by dE/dx measurements in the tracking detectors and in a ring-imaging Cherenkov detectorsurrounding the drift chamber. The trigger, data acquisition and data-monitoring systems, VME- andnetwork-based, are controlled by custom-designed online software. Details of the layout and performanceof the detector components and their associated electronics and software are presented.
Submitted to Nuclear Instruments and Methods
Stanford Linear Accelerator Center, Stanford University, Stanford, CA 94309
Work supported in part by Department of Energy contract DE-AC03-76SF00515.

i
The BABAR Collaboration
B. Aubert, A. Bazan, A. Boucham, D. Boutigny, I. De Bonis, J. Favier, J.-M. Gaillard, A. Jeremie,Y. Karyotakis, T. Le Flour, J.P. Lees, S. Lieunard, P. Petitpas, P. Robbe, V. Tisserand, K. Zachariadou
Laboratoire de Physique des Particules, F-74941 Annecy-le-Vieux, France
A. Palano
Universita di Bari, Dipartimento di Fisica and INFN, I-70126 Bari, Italy
G.P. Chen, J.C. Chen, N.D. Qi, G. Rong, P. Wang, Y.S. Zhu
Institute of High Energy Physics, Beijing 100039, China
G. Eigen, P.L. Reinertsen, B. Stugu
University of Bergen, N-5007 Bergen, Norway
B. Abbott, G.S. Abrams, L. Amerman, A.W. Borgland, A.B. Breon, D.N. Brown, J. Button-Shafer, A.R. Clark,S. Dardin, C. Day, S.F. Dow, Q. Fan, I. Gaponenko, M.S. Gill, F.R. Goozen, S.J. Gowdy, A. Gritsan,
Y. Groysman, C. Hernikl, R.G. Jacobsen, R.C. Jared, R.W. Kadel, J. Kadyk, A. Karcher, L.T. Kerth, I. Kipnis,S. Kluth, J.F. Kral, R. Lafever, C. LeClerc, M.E. Levi, S.A. Lewis, C. Lionberger, T. Liu, M. Long, L. Luo,
G. Lynch, P. Luft, E. Mandelli, M. Marino, K. Marks, C. Matuk, A.B. Meyer, R. Minor, A. Mokhtarani,M. Momayezi, M. Nyman, P.J. Oddone, J. Ohnemus, D. Oshatz, S. Patton, M. Pedrali-Noy, A. Perazzo,
C. Peters, W. Pope, M. Pripstein, D.R. Quarrie, J.E. Rasson, N.A. Roe, A. Romosan, M.T. Ronan,V.G. Shelkov, R. Stone, P.D. Strother,1 A.V. Telnov, H. von der Lippe, T.F. Weber, W.A. Wenzel, G. Zizka
Lawrence Berkeley National Laboratory and University of California, Berkeley, CA 94720, USA
P.G. Bright-Thomas, C.M. Hawkes, A. Kirk, D. J. Knowles, S.W. O’Neale, A.T. Watson, N.K. Watson
University of Birmingham, Birmingham, B15 2TT, UK
T. Deppermann, H. Koch, J. Krug, M. Kunze, B. Lewandowski, K. Peters, H. Schmuecker, M. Steinke
Ruhr Universitat Bochum, Inst. f. Experimentalphysik 1, D-44780 Bochum, Germany
J.C. Andress, N.R. Barlow, W. Bhimji, N. Chevalier, P.J. Clark, W.N. Cottingham, N. De Groot, N. Dyce,B. Foster, A. Mass, J.D. McFall, D. Wallom, F.F. Wilson
University of Bristol, Bristol BS8 1TL, UK
K. Abe, C. Hearty, J.A. McKenna, D. Thiessen
University of British Columbia, Vancouver, BC, Canada V6T 1Z1
B. Camanzi, T.J. Harrison,2 A.K. McKemey, J. Tinslay
Brunel University, Uxbridge, Middlesex UB8 3PH, UK
E.I. Antohin, V.E. Blinov, A.D. Bukin, D.A. Bukin, A.R. Buzykaev, M.S. Dubrovin, V.B. Golubev,V.N. Ivanchenko, G.M. Kolachev, A.A. Korol, E.A. Kravchenko, S.F. Mikhailov, A.P. Onuchin, A.A. Salnikov,
S.I. Serednyakov, Yu.I. Skovpen, V.I. Telnov, A.N. Yushkov
Budker Institute of Nuclear Physics, Novosibirsk 630090, Russia
J. Booth, A.J. Lankford, M. Mandelkern, S. Pier, D.P. Stoker, G. Zioulas
University of California at Irvine, Irvine, CA 92697, USA
1Now at Queen Mary, University of London, London, E1 4NS, UK2Now at University of Birmingham, Birmingham B15 2TT, UK

ii
A. Ahsan, K. Arisaka, C. Buchanan, S. Chun
University of California at Los Angeles, Los Angeles, CA 90024, USA
R. Faccini,3 D.B. MacFarlane, S.A. Prell, Sh. Rahatlou, G. Raven, V. Sharma
University of California at San Diego, La Jolla, CA 92093, USA
S. Burke, D. Callahan, C. Campagnari, B. Dahmes, D. Hale, P.A. Hart, N. Kuznetsova, S. Kyre, S. L. Levy,O. Long, A. Lu, J. May, J.D. Richman, W. Verkerke, M. Witherell, S. Yellin
University of California at Santa Barbara, Santa Barbara, CA 93106, USA
J. Beringer, J. DeWitt, D.E. Dorfan, A.M. Eisner, A. Frey, A.A. Grillo, M. Grothe, C.A. Heusch, R.P. Johnson,W. Kroeger, W.S. Lockman, T. Pulliam, W. Rowe, H. Sadrozinski, T. Schalk, R.E. Schmitz, B.A. Schumm,
A. Seiden, E.N. Spencer, M. Turri, W. Walkowiak, M. Wilder, D.C. Williams
University of California at Santa Cruz, Santa Cruz, CA 95064, USA
E. Chen, G.P. Dubois-Felsmann, A. Dvoretskii, J.E. Hanson, D.G. Hitlin, Yu.G. Kolomensky,4 S. Metzler,J. Oyang, F.C. Porter, A. Ryd, A. Samuel, M. Weaver, S. Yang, R.Y. Zhu
California Institute of Technology, Pasadena, CA 91125, USA
S. Devmal, T.L. Geld, S. Jayatilleke, S.M. Jayatilleke, G. Mancinelli, B.T. Meadows, M.D. Sokoloff
University of Cincinnati, Cincinnati, OH 45221, USA
P. Bloom, B. Broomer, E. Erdos, S. Fahey, W.T. Ford, F. Gaede, W.C. van Hoek, D.R. Johnson, A.K. Michael,U. Nauenberg, A. Olivas, H. Park, P. Rankin, J. Roy, S. Sen, J.G. Smith, D.L. Wagner
University of Colorado, Boulder, CO 80309, USA
J. Blouw, J.L. Harton, M. Krishnamurthy, A. Soffer, W.H. Toki, D.W. Warner, R.J. Wilson, J. Zhang
Colorado State University, Fort Collins, CO 80523, USA
T. Brandt, J. Brose, G. Dahlinger, M. Dickopp, R.S. Dubitzky, P. Eckstein, H. Futterschneider, M.L. Kocian,R. Krause, R. Muller-Pfefferkorn, K.R. Schubert, R. Schwierz, B. Spaan, L. Wilden
Technische Universitat Dresden, D-01062 Dresden, Germany
L. Behr, D. Bernard, G.R. Bonneaud, F. Brochard, J. Cohen-Tanugi, S. Ferrag, G. Fouque, F. Gastaldi,P. Matricon, P. Mora de Freitas, C. Renard, E. Roussot, S. T’Jampens, C. Thiebaux, G. Vasileiadis, M. Verderi
Ecole Polytechnique, F-91128 Palaiseau, France
A. Anjomshoaa, R. Bernet, F. Di Lodovico, F. Muheim, S. Playfer, J.E. Swain
University of Edinburgh, Edinburgh EH9 3JZ, UK
M. Falbo
Elon College, Elon College, NC 27244, USA
C. Bozzi, S. Dittongo, M. Folegani, L. Piemontese, A..C. Ramusino
Universita di Ferrara, Dipartimento di Fisica and INFN, I-44100 Ferrara, Italy
3Jointly appointed with Universita di Roma La Sapienza, Dipartimento di Fisica and INFN, I-00185 Roma, Italy4Now at LBNL and University of California, Berkeley, CA 94720, USA

iii
E. Treadwell
Florida A&M University, Tallahassee, FL 32307, USA
F. Anulli,5 R. Baldini-Ferroli, A. Calcaterra, R. de Sangro, D. Falciai, G. Finocchiaro, P. Patteri, I.M. Peruzzi,5
M. Piccolo, Y. Xie, A. Zallo
Laboratori Nazionali di Frascati dell’INFN, I-00044 Frascati, Italy
S. Bagnasco, A. Buzzo, R. Contri, G. Crosetti, P. Fabbricatore, S. Farinon, M. Lo Vetere, M. Macri, S. Minutoli,M.R. Monge, R. Musenich, M. Pallavicini, R. Parodi, S. Passaggio, F.C. Pastore, C. Patrignani, M.G. Pia,
C. Priano, E. Robutti, A. Santroni
Universita di Genova, Dipartimento di Fisica and INFN, I-16146 Genova, Italy
R. Bartoldus, T. Dignan, R. Hamilton, U. Mallik
University of Iowa, Iowa City, IA 52242, USA
J. Cochran, H.B. Crawley, P.A. Fischer, J. Lamsa, R. McKay, W.T. Meyer, E.I. Rosenberg
Iowa State University, Ames, IA 50011-3160, USA
J.N. Albert, C. Beigbeder, M. Benkebil, D. Breton, R. Cizeron, S. Du, G. Grosdidier, C. Hast, A. Hocker,H. M. Lacker, V. LePeltier, A.M. Lutz, S. Plaszczynski, M.H. Schune, S. Trincaz-Duvoid, K. Truong, A. Valassi,
G. Wormser
Laboratoire de l’Accelerateur Lineaire, F-91898 Orsay, France
O. Alford, D. Behne, R.M. Bionta, J. Bowman, V. Brigljevic, A. Brooks, V.A. Dacosta, O. Fackler, D. Fujino,M. Harper, D.J. Lange, M. Mugge, T.G. O’Connor, H. Olson, L. Ott, E. Parker, B. Pedrotti, M. Roeben,
X. Shi, K. van Bibber, T.J. Wenaus, D.M. Wright, C.R. Wuest, B. Yamamoto
Lawrence Livermore National Laboratory, Livermore, CA 94550, USA
M. Carroll, P. Cooke, J.R. Fry, E. Gabathuler, R. Gamet, M. George, M. Kay, S. McMahon,6 A. Muir,D.J. Payne, R.J. Sloane, P. Sutcliffe, C. Touramanis
University of Liverpool, Liverpool L69 3BX, UK
M.L. Aspinwall, D.A. Bowerman, P.D. Dauncey, I. Eschrich, N.J.W. Gunawardane, R. Martin, J.A. Nash,D.R. Price, P.Sanders, D.Smith
University of London, Imperial College, London, SW7 2BW, UK
D.E. Azzopardi, J.J. Back, P. Dixon, P.F. Harrison, D. Newman-Coburn,7 R.J.L. Potter, H.W. Shorthouse,M.I. Williams, P.B. Vidal
Queen Mary, University of London, London, E1 4NS, UK
G. Cowan, S. George, M.G. Green, A. Kurup, C.E. Marker, P. McGrath, T.R. McMahon, F. Salvatore, I. Scott,G. Vaitsas
University of London, Royal Holloway and Bedford New College, Egham, Surrey TW20 0EX, UK
D. Brown, C. L. Davis, Y. Li, J. Pavlovich
University of Louisville, Louisville, KY 40292, USA
5Jointly appointed with Univ. di Perugia, I-06100 Perugia, Italy6Now at University of California at Irvine, Irvine, CA 92697, USA7Deceased

iv
J. Allison, R.J. Barlow, J.T. Boyd, J. Fullwood, F. Jackson, A. Khan,8 G.D. Lafferty, N. Savvas,E.T. Simopoulos, R.J. Thompson, J.H. Weatherall
University of Manchester, Manchester M13 9PL, UK
R. Bard, C. Dallapiccola,9 A. Farbin, A. Jawahery, V. Lillard, J. Olsen, D.A. Roberts, J.R. Schieck
University of Maryland, College Park, MD 20742, USA
G. Blaylock, K.T. Flood, S.S. Hertzbach, R. Kofler, C.S. Lin, S. Willocq, J. Wittlin
University of Massachusetts, Amherst, MA 01003, USA
B. Brau, R. Cowan, F. Taylor, R.K. Yamamoto
Massachusetts Institute of Technology, Cambridge, MA 02139, USA
D.I. Britton, R. Fernholz,10 M. Houde, M. Milek, P.M. Patel, J. Trischuk
McGill University, Montreal, QC, Canada H3A 2T8
F. Lanni, F. Palombo
Universita di Milano, Dipartimento di Fisica and INFN, I-20133 Milano, Italy
J.M. Bauer, M. Booke, L. Cremaldi, R. Kroeger, M. Reep, J. Reidy, D.A. Sanders, D.J. Summers
University of Mississippi, University, MS 38677, USA
J. F. Arguin, M. Beaulieu, J. P. Martin, J. Y. Nief, R. Seitz, P. Taras, A. Woch, V. Zacek
Universite de Montreal, Lab. Rene J.A. Levesque, Montreal, QC, Canada, H3C 3J7
H. Nicholson, C.S. Sutton
Mount Holyoke College, South Hadley, MA 01075, USA
C. Cartero, N. Cavallo,11 G. De Nardo, F. Fabozzi, C. Gatto, L. Lista, D. Piccolo, C. Sciacca
Universita di Napoli Federico II, Dipartimento di Fisica and INFN, I-80126 Napoli, Italy
N. M. Cason, J. M. LoSecco
University of Notre Dame, Notre Dame, IN 46556, USA
J.R. G. Alsmiller, T.A. Gabriel, T. Handler, J. Heck
Oak Ridge National Laboratory, Oak Ridge, TN 37831, USA
M. Iwasaki, N.B. Sinev,
University of Oregon, Eugene, OR 97403, USA
R. Caracciolo, F. Colecchia, F. Dal Corso, F. Galeazzi, M. Marzolla, G. Michelon, M. Morandin, M. Posocco,M. Rotondo, S. Santi, F. Simonetto, R. Stroili, E. Torassa, C. Voci
Universita di Padova, Dipartimento di Fisica and INFN, I-35131 Padova, Italy
8Now at University of Edinburgh, Edinburgh EH9 3JZ, UK9Now at University of Massachusetts, Amherst, MA 01003, USA10Now at Princeton University, Princeton, NJ 08544, USA11Also with Universita della Basilicata, I-85100 Portenza, Italy

v
P. Bailly, M. Benayoun, H. Briand, J. Chauveau, P. David, C. De la Vaissiere, L. Del Buono, J.-F. Genat,O. Hamon, Ph. Leruste, F. Le Diberder, H. Lebbolo, J. Lory, L. Martin, F. Martinez-Vidal,12 L. Roos, J. Stark,
S. Versille, B. Zhang
Universite Paris VI et VII, F-75252 Paris, France
P.F. Manfredi, L. Ratti, V. Re, V. Speziali
Universita di Pavia, Dipartimento di Fisica and INFN, I-27100 Pavia, Italy
E.D. Frank, L. Gladney, Q.H. Guo, J.H. Panetta
University of Pennsylvania, Philadelphia, PA 19104, USA
C. Angelini, G. Batignani, S. Bettarini, M. Bondioli, F. Bosi, M. Carpinelli, F. Forti, A. Gaddi, D. Gagliardi,M.A. Giorgi, A. Lusiani, P. Mammini, M. Morganti, F. Morsani, N. Neri, A. Profeti, E. Paoloni, F. Raffaelli,
M. Rama, G. Rizzo, F. Sandrelli, G. Simi, G. Triggiani
Universita di Pisa, Scuola Normale Superiore, and INFN, I-56010 Pisa, Italy
M. Haire, D. Judd, K. Paick, L. Turnbull, D. E. Wagoner
Prairie View A&M University, Prairie View, TX 77446, USA
J. Albert, C. Bula, M.H. Kelsey, C. Lu, K.T. McDonald, V. Miftakov, B. Sands, S.F. Schaffner, A.J.S. Smith,A. Tumanov, E.W. Varnes
Princeton University, Princeton, NJ 08544, USA
F. Bronzini, A. Buccheri, C. Bulfon, G. Cavoto, D. del Re, F. Ferrarotto, F. Ferroni, K. Fratini, E. Lamanna,E. Leonardi, M.A. Mazzoni, S. Morganti, G. Piredda, F. Safai Tehrani, M. Serra, C. Voena
Universita di Roma La Sapienza, Dipartimento di Fisica and INFN, I-00185 Roma, Italy
R. Waldi
Universitat Rostock, D-18051 Rostock, Germany
P.F. Jacques, M. Kalelkar, R.J. Plano
Rutgers University, New Brunswick, NJ 08903, USA
T. Adye, B. Claxton, J. Dowdell, U. Egede, B. Franek, S. Galagedera, N.I. Geddes, G.P. Gopal, J. Kay,13
J. Lidbury, S. Madani, S. Metcalfe,13,14 G. Markey,13 P. Olley, M. Watt, S.M. Xella
Rutherford Appleton Laboratory, Didcot, Oxon., OX11 0QX, UK
R. Aleksan, P. Besson,7 P. Bourgeois, P. Convert, G. De Domenico, A. de Lesquen, S. Emery, A. Gaidot,S. F. Ganzhur, Z. Georgette, L. Gosset, P. Graffin, G. Hamel de Monchenault, S. Herve, M. Karolak,
W. Kozanecki, M. Langer, G.W. London, V. Marques, B. Mayer, P. Micout, J.P. Mols, J.P. Mouly, Y. Penichot,J. Rolquin, B. Serfass, J.C. Toussaint, M. Usseglio, G. Vasseur, C. Yeche, M. Zito
DAPNIA, Commissariat a l’Energie Atomique/Saclay, F-91191 Gif-sur-Yvette, France
N. Copty, M.V. Purohit, F.X. Yumiceva
University of South Carolina, Columbia, SC 29208, USA
12Now at Universita di Pisa, I-56010 Pisa, Italy13At CLRC Daresbury Laboratory, Daresbury, Warrington, Cheshire, WA4 4AD, UK14Now at Stanford Linear Accelerator Center, Stanford, CA 94309, USA

vi
I. Adam, A. Adesanya, P.L. Anthony, D. Aston, J. Bartelt, J. Becla, R. Bell, E. Bloom, C.T. Boeheim,A.M. Boyarski, R.F. Boyce, D. Briggs, F. Bulos, W. Burgess, B. Byers, G. Calderini, R. Chestnut, R. Claus,
M.R. Convery, R. Coombes, L. Cottrell, D.P. Coupal, D.H. Coward, W.W. Craddock, S. DeBarger,H. DeStaebler, J. Dorfan, M. Doser, W. Dunwoodie, J.E. Dusatko, S. Ecklund, T.H. Fieguth, D.R. Freytag,T. Glanzman, G.L. Godfrey, G. Haller, A. Hanushevsky, J. Harris, A. Hasan, C. Hee, T. Himel, M.E. Huffer,
T. Hung, W.R. Innes, C.P. Jessop, H. Kawahara, L. Keller, M.E. King, L. Klaisner, H.J. Krebs, U. Langenegger,W. Langeveld, D.W.G.S. Leith, S.K. Louie, S. Luitz, V. Luth, H.L. Lynch, J. McDonald, G. Manzin,
H. Marsiske, T. Mattison,15 M. McCulloch, M. McDougald, D. McShurley, S. Menke, R. Messner, S. Metcalfe,M. Morii,16 R. Mount, D. R. Muller, D. Nelson, M. Norby, C.P. O’Grady, L. Olavson, J. Olsen, F.G. O’Neill,
G. Oxoby, P. Paolucci,17 T. Pavel, J. Perl, M. Pertsova, S. Petrak, G. Putallaz, P.E. Raines, B.N. Ratcliff,R. Reif, S.H. Robertson, L.S. Rochester, A. Roodman, J.J. Russel, L. Sapozhnikov, O.H. Saxton, T. Schietinger,
R.H. Schindler, J. Schwiening, G. Sciolla,18 J.T. Seeman, V.V. Serbo, S. Shapiro, K. Skarpass Sr., A. Snyder,E. Soderstrom, A. Soha, S.M. Spanier, A. Stahl, P. Stiles, D. Su, M.K. Sullivan, M. Talby, H.A. Tanaka,
J. Va’vra, S.R. Wagner, R. Wang, T. Weber, A.J.R. Weinstein, J.L. White, U. Wienands, W.J. Wisniewski,C.C. Young, N. Yu
Stanford Linear Accelerator Center, Stanford, CA 94309, USA
P.R. Burchat, C.H. Cheng, D. Kirkby, T.I. Meyer, C. Roat
Stanford University, Stanford, CA 94305-4060, USA
R. Henderson, N. Khan
TRIUMF, Vancouver, BC, Canada V6T 2A3
S. Berridge, W. Bugg, H. Cohn, E. Hart, A.W. Weidemann
University of Tennessee, Knoxville, TN 37996, USA
T. Benninger, J.M. Izen, I. Kitayama, X.C. Lou, M. Turcotte
University of Texas at Dallas, Richardson, TX 75083, USA
F. Bianchi, M. Bona, F. Daudo, B. Di Girolamo, D. Gamba, P. Grosso, A. Smol, P..P. Trapani, D. Zanin
Universita di Torino, Dipartimento di Fisica and INFN, I-10125 Torino, Italy
L. Bosisio, G. Della Ricca, L. Lanceri, A. Pompili, P. Poropat, M. Prest, I. Rashevskaia, E. Vallazza, G. Vuagnin
Universita di Trieste, Dipartimento di Fisica and INFN, I-34127 Trieste, Italy
R.S. Panvini
Vanderbilt University, Nashville, TN 37235, USA
C. Brown, A. De Silva,19 R. Kowalewski, D. Pitman, J.M. Roney
University of Victoria, Victoria, BC, Canada V8W 3P6
H.R. Band, E. Charles, S. Dasu, P. Elmer, J.R. Johnson, J. Nielsen, W. Orejudos, Y. Pan, R. Prepost,I.J. Scott, J. Walsh,12 S.L. Wu, Z. Yu, H. Zobernig
University of Wisconsin, Madison, WI 53706, USA
15Now at University of British Columbia, Vancouver, BC, Canada V6T 1Z116Now at Harvard University, Cambridge, MA 0213817Now at Universita di Napoli Federico II, I-80126 Napoli, Italy18Now at Massachusetts Institute of Technology, Cambridge, MA 02139, USA19Now at TRIUMF, Vancouver, BC, Canada V6T 2A3

vii
T.B. Moore, H. Neal
Yale University, New Haven, CT 06511, USA


![A Master Project : Searching for a Supersymmetric Higgs ... · 18.03.07 Neal Gueissaz LPHE Projet de Master 3 Théorie 0 0 q i q l q l q i q j q m q n q k h0 m h ∈[93,115] GeV m](https://static.fdocument.org/doc/165x107/5f1c90db415a5a3ff777bef3/a-master-project-searching-for-a-supersymmetric-higgs-180307-neal-gueissaz.jpg)