Teoria de Vigas -...
57
Departamento de Engenharia Mecânica ENG 1704 - Mecânica dos Sólidos II Teoria de Vigas Prof. Arthur Braga
Transcript of Teoria de Vigas -...

Departamento de Engenharia Mecânica ENG 1704 - Mecânica dos Sólidos II
Teoria de Vigas
Prof. Arthur Braga

Mecânica dos Sólidos II
Tensões de Flexão em Barras (vigas)
φρ Δ=′′NMDeformação do segmento IJ
φρ Δ−=′′ )( yJI
Eixo Neutro (deformação nula)
Compresão
M ′ N ′
I ′ J ′
Tração
ρ
y−ρ
y

Mecânica dos Sólidos II
Tensões de Flexão em Barras (vigas)
Deformação longitudinal
NMNMJI
IJIJJI
xx ′′′′−′′=−′′=ε
φρ Δ=′′NM
φρ Δ−=′′ )( yJI
ydxdy
xxφ
ρε −=−=
Deformação cisalhante
021 == xyxy γε
Simetria (flexão pura)

Mecânica dos Sólidos II
Tensões de Flexão em Barras (vigas)
Curvatura
O
O′
φΔ
φΔφ
sΔ
ρ
B
C
A curvatura no ponto B é definida como:
ρφφ 11limlim
00=
′=
ΔΔ==
→Δ→Δ BOsdsdk
ssw
x
Para w’ << 1

Mecânica dos Sólidos II
Tensões de Flexão em Barras (vigas)
xxσ
x
y
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
00000000)(
),,(y
zyxxxσ
σ
IMyyxx −=)(σ
Tensões Normais de Flexão
MM

Mecânica dos Sólidos II
Teoria da Elasticidade
Problema Corpo sujeito a ação de esforços externos (forças, momentos, etc.)
F1
F2
F3
F4
F5
F6
F7
F8
F1
F2
F3
F4
F5
F6
F7
F8
Determinar • Esforços internos (tensões) • Deformações • Deslocamentos

Mecânica dos Sólidos II
Teoria da Elasticidade
• Relações entre deslocamentos e deformações
zuyuxu
zzz
yyy
xxx
∂∂=
∂∂
=
∂∂=
ε
ε
ε
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂+
∂∂
==
⎟⎠⎞⎜
⎝⎛
∂∂+
∂∂==
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂==
yu
zu
xu
zu
xu
yu
zyyzyz
zxxzxz
yxxyxy
21
21
21
21
21
21
γε
γε
γε

Mecânica dos Sólidos II
Teoria da Elasticidade
• Relações constitutivas (tensão vs. deformação)
TEEE
TEEE
TEEE
zzyyxxzz
zzyyxxyy
zzyyxxxx
Δ++−−=
Δ+−+−=
Δ+−−=
ασσνσνε
ασνσσνε
ασνσ
νσε
G
G
G
yzyz
xzxz
xyxy
2
2
2
σε
σε
σε
=
=
=
( )ν+=12EG

Mecânica dos Sólidos II
Teoria da Elasticidade
• Equações de Equilíbrio
0=∂
∂+∂∂
+∂∂
zyxxzxyxx σσσ
0=∂
∂+
∂∂
+∂
∂zyxyzyyxy σσσ
0=∂∂+
∂∂
+∂∂
zyxzzyzxz σσσ

Mecânica dos Sólidos II
Teoria da Elasticidade
• 15 Equações – Equilíbrio (3) – Deformação vs. Deslocamentos (6) – Tensão vs. Deformação (6)
• 15 Variáveis:
• Condições de contorno
yzxzxyzzyyxx
yzxzxyzzyyxx
zyx uuu
εεεεεεσσσσσσ
,,,,,
,,,,,
,,
F1
F2
F3
F4
F5
F6
F7
F8
F1
F2
F3
F4
F5
F6
F7
F8

Mecânica dos Sólidos II
x
y
z 3D
Teoria de Vigas
n(x)
q(x)
Teoria de Vigas (aproximação)
q(x)
x
n(x)
1D

Mecânica dos Sólidos II
Teoria de Vigas
x
z
Hipótese Cinemática
P u
P’
Φ
w P’’
⎩⎨⎧
==
)()0,()()0,(xwxuxuxu
z
x

Mecânica dos Sólidos II
Teoria de Vigas
x
z
z Q Q’
Φ
Q’’
u w
-zφ
Hipótese Cinemática ⎩⎨⎧
=−=)(),(
)()(),(xwzxu
xzxuzxu
z
x φ

Mecânica dos Sólidos II
Teoria de Vigas
x
z
Teoria de Bernoulli-Euler ⎪⎩
⎪⎨⎧
=
−=
)(),(
)(),(
xwzxudxdwzxuzxu
z
x
90°
dxdw=φ
dxdw

Mecânica dos Sólidos II
Teoria de Vigas Definição de Esforços Generalizados
O Esforço Normal
σxx N x x
∫=A
xx dAN σ

Mecânica dos Sólidos II
Teoria de Vigas Definição de Esforços Generalizados
O Momento Fletor
dN =σxx(z) dA
x
x
∫=A
xx dAzM σ
z
σxx
x
M

Mecânica dos Sólidos II
Teoria de Vigas Definição de Esforços Generalizados
O Esforço Cortante
σxz V
x x
∫=A
xz dAV σ

Mecânica dos Sólidos II
Teoria de Vigas Equilíbrio (Tensão Plana)
0=∂∂+
∂∂
zxxzxx σσ
0=∂∂+
∂∂
zxzzxz σσ
0=⎟⎠⎞⎜
⎝⎛
∂∂+
∂∂
∫A
xzxx dAzxσσ
0=⎟⎠⎞⎜
⎝⎛
∂∂+
∂∂
∫A
xzxx dAzx
z σσ
0=⎟⎠⎞⎜
⎝⎛
∂∂+
∂∂
∫A
zzxz dAzxσσ

Mecânica dos Sólidos II
0)(0 =+⇒=⎟⎠⎞⎜
⎝⎛
∂∂+
∂∂
∫ xndxdNdA
zxA
xzxx σσ
Teoria de Vigas Equilíbrio (cont.)
dxdNdA
dxddA
x Axx
A
xx ==∂∂
∫∫ σσ
)(xndAzA
xz =∂∂∫
σ
logo x
y
z
n(x)

Mecânica dos Sólidos II
Teoria de Vigas Equilíbrio (cont.)
dxdMdAz
dxddA
xz
Axx
A
xx ==∂∂
∫∫ σσ
VdAz
zA
xz −=∂∂
∫σ
0)(0 =−⇒=⎟⎠⎞⎜
⎝⎛
∂∂+
∂∂
∫ xVdxdMdA
zxz
A
xzxx σσ
logo

Mecânica dos Sólidos II
Teoria de Vigas Equilíbrio (cont.)
dxdVdA
dxddA
x Axz
A
xz ==∂∂
∫∫ σσ
)(xqdAzA
zz =∂∂∫
σ
0)(0 =+⇒=⎟⎠⎞⎜
⎝⎛
∂∂+
∂∂
∫ xqdxdVdA
zxA
zzxz σσ
logo x
y
z q(x)

Mecânica dos Sólidos II
Teoria de Vigas Equilíbrio
0)( =+ xndxdN
0)( =− xVdxdM
0)( =+ xqdxdV
Extensão (Esforços Axiais)
Flexão (Esforços de Flexão)

Mecânica dos Sólidos II
Teoria de Vigas Deformações
2
2
dxwdz
dxdu
xux
xx −=∂∂=ε
021 =⎟
⎠⎞⎜
⎝⎛
∂∂+
∂∂=
xu
zu zx
xzε
0=∂∂=zuz
zzε
Relações Constitutivas
02
2
2
==
−==
xzxz
xxxx
GdxwdzE
dxduEE
εσ
εσ

Mecânica dos Sólidos II
Teoria de Vigas Relações Constitutivas em termos dos esforços generalizados
dxduEAdA
dxwdEzdA
dxduEdAN
AAAxx =−== ∫∫∫ 2
2
σ
2
2
2
22
dxwdEIdA
dxwdEzdA
dxduzEdAzM
AAAxx −=−== ∫∫∫ σ
∫=A
dAzI 2
onde I é o momento de inércia da seção transversal da viga:

Mecânica dos Sólidos II
Teoria de Vigas
Momento de Inércia ∫=A
dAzI 2
Seção Retangular
h
b
12
3bhI =
Seção Tubular
8211
64
344 tDDtDI ππ ≈⎟
⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞⎜
⎝⎛ −−=
D
t

Mecânica dos Sólidos II
Momento de Inércia
Seção Tubular
D
t
Para D >> t

Mecânica dos Sólidos II
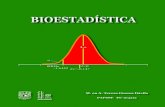
Momento de Inércia
0.00#
0.50#
1.00#
1.50#
2.00#
2.50#
3.00#
3.50#
4.00#
4.50#
0# 10# 20# 30# 40# 50# 60# 70#D/t
D
t

Mecânica dos Sólidos II
0%#
50%#
100%#
150%#
200%#
250%#
300%#
0# 10# 20# 30# 40# 50# 60# 70#
Momento de Inércia
D/t
D
t
ERRO RELATIVO

Mecânica dos Sólidos II
x
y
z 3D
Teoria de Vigas
n(x)
q(x)
Teoria de Vigas (aproximação)
q(x)
x
n(x)
1D

Mecânica dos Sólidos II
Teoria de Vigas
x
z
Teoria de Bernoulli-Euler ⎪⎩
⎪⎨⎧
=
−=
)(),(
)(),(
xwzxudxdwzxuzxu
z
x
90°
dxdw=φ
dxdw

Mecânica dos Sólidos II
Teoria de Vigas Definição de Esforços Generalizados
O Esforço Normal
σxx N x x
∫=A
xx dAN σ

Mecânica dos Sólidos II
Teoria de Vigas Definição de Esforços Generalizados
O Momento Fletor
dN =σxx(z) dA
x
x
∫=A
xx dAzM σ
z
σxx
x
M

Mecânica dos Sólidos II
Teoria de Vigas Definição de Esforços Generalizados
O Esforço Cortante
σxz V
x x
∫=A
xz dAV σ

Mecânica dos Sólidos II
Teoria de Vigas Equilíbrio (Tensão Plana)
0=∂∂+
∂∂
zxxzxx σσ
0=∂∂+
∂∂
zxzzxz σσ
0=⎟⎠⎞⎜
⎝⎛
∂∂+
∂∂
∫A
xzxx dAzxσσ
0=⎟⎠⎞⎜
⎝⎛
∂∂+
∂∂
∫A
xzxx dAzx
z σσ
0=⎟⎠⎞⎜
⎝⎛
∂∂+
∂∂
∫A
zzxz dAzxσσ

Mecânica dos Sólidos II
Teoria de Vigas Equilíbrio
0)( =+ xndxdN
0)( =− xVdxdM
0)( =+ xqdxdV
Extensão (Esforços Axiais)
Flexão (Esforços de Flexão)

Mecânica dos Sólidos II
Teoria de Vigas Deformações
2
2
dxwdz
dxdu
xux
xx −=∂∂=ε
021 =⎟
⎠⎞⎜
⎝⎛
∂∂+
∂∂=
xu
zu zx
xzε
0=∂∂=zuz
zzε
Relações Constitutivas: ESTADO UNIAXIAL DE TENSÕES
02
2
2
==
−==
xzxz
xxxx
GdxwdzE
dxduEE
εσ
εσ

Mecânica dos Sólidos II
Teoria de Vigas
dxduEAN
xndxdN
=
=+ 0)(
2
2
0)(
0)(
dxwdEIM
xqdxdV
xVdxdM
−=
=+
=−
x
y
z
n(x) x
y
z
x
y
z
n(x)n(x)
Extensão (Esforços Axiais)
x
y
zq(x)
x
y
z
x
y
zq(x)q(x)
Flexão (Esforços de Flexão)

Mecânica dos Sólidos II
Tensões de Flexão em Barras (vigas)
φρ Δ=′′NMDeformação do segmento IJ
φρ Δ−=′′ )( yJI
Eixo Neutro (deformação nula)
Compresão
M ′ N ′
I ′ J ′
Tração
ρ
y−ρ
y

Mecânica dos Sólidos II
Tensões de Flexão em Barras (vigas)
Deformação longitudinal
NMNMJI
IJIJJI
xx ′′′′−′′=−′′=ε
φρ Δ=′′NM
φρ Δ−=′′ )( yJI
ydxdy
xxφ
ρε −=−=
Deformação cisalhante
021 == xyxy γε
Simetria (flexão pura)

Mecânica dos Sólidos II
Tensões de Flexão em Barras (vigas)
Curvatura
O
O′
φΔ
φΔφ
sΔ
ρ
B
C
A curvatura no ponto B é definida como:
ρφφ 11limlim
00=
′=
ΔΔ==
→Δ→Δ BOsdsdk
ssy
x

Mecânica dos Sólidos II
Teoria de Vigas
dxduEAN
xndxdN
=
=+ 0)(
2
2
0)(
0)(
dxwdEIM
xqdxdV
xVdxdM
−=
=+
=−
x
y
z
n(x) x
y
z
x
y
z
n(x)n(x)
Extensão (Esforços Axiais)
x
y
zq(x)
x
y
z
x
y
zq(x)q(x)
Flexão (Esforços de Flexão)

Mecânica dos Sólidos II
Extensão (Esforços Axiais)
Flexão (Esforços de Flexão)
Teoria de Vigas Tensões
AN
dxduEE xxxx === εσ
IMz
dxwdzEE xxxx =−== 2
2
εσ

Mecânica dos Sólidos II
Teoria de Vigas
Ex. 1 (flexão): Viga bi-engastada sujeita a carregamento transversal uniforme
x
z q(x) = - q = cte.
2
2
0
0)(
dxwdEIM
qdxdV
xVdxdM
−=
=−
=−
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
=
=
=
0)(
0)(
0)0(
0)0(
LdxdwLw
dxdww
Condições de Contorno

Mecânica dos Sólidos II
Teoria de Vigas (Ex. 1 – continuação)
432
23
1
4
4
4
2
2
24)(0
0)(
cxcxcxcEIqxxwq
dxwdEI
dxwdEIM
qdxdV
xVdxdM
++++−=⇒−=⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
−=
=−
=−
Utilizando-se as condições de contorno:
EIqLc
EIqLccc
12e,
24,0,0 1
2
234 =−===
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞⎜
⎝⎛+⎟
⎠⎞⎜
⎝⎛−⎟
⎠⎞⎜
⎝⎛−=
2344
224
)(Lx
Lx
Lx
EIqLxw

Mecânica dos Sólidos II
Teoria de Vigas (Ex.1 – continuação)
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞⎜
⎝⎛+⎟
⎠⎞⎜
⎝⎛−⎟
⎠⎞⎜
⎝⎛−=
2344
224
)(Lx
Lx
Lx
EIqLxw
⎥⎥⎦
⎤
⎢⎢⎣
⎡+⎟
⎠⎞⎜
⎝⎛−⎟
⎠⎞⎜
⎝⎛=−= 166
12)(
22
2
2
Lx
LxqL
dxwdEIxM
EIqLLww384
)2(4
max −==12
)()0(2
maxqLLMMM ===
{ }tD
qLxx 2
2
3max
πσ = para viga de seção tubular (D/t >> 1)

Mecânica dos Sólidos II
Teoria de Vigas
dxduEAN
xndxdN
=
=+ 0)(
2
2
0)(
0)(
dxwdEIM
xqdxdV
xVdxdM
−=
=+
=−
x
y
z
n(x) x
y
z
x
y
z
n(x)n(x)
Extensão (Esforços Axiais)
x
y
zq(x)
x
y
z
x
y
zq(x)q(x)
Flexão (Esforços de Flexão)

Mecânica dos Sólidos II
Teoria de Vigas (Ex. 2)
Ex. 2 (flexão): Viga simplesmente apoiada sujeita a carregamento transversal concentrado
⎩⎨⎧
<<<<
==LxL
Lxxq
EIxq
dxwd
2,020,0
)(,)(4
4
x
z P
L/2 L/2
A função q(x) não está definida em x = L/2

Mecânica dos Sólidos II
Teoria de Vigas (Ex. 2)
432
23
14
4
)(0 cxcxcxcxwdxwd +++=⇒=
432
23
14
4
)()()()(0 dxLdxLdxLdxwdxwd +−+−+−=⇒=
20 Lx <<Para
LxL <<2Para

Mecânica dos Sólidos II
Teoria de Vigas (Ex. 2)
0)(''0)()(0)()(
0)0(''0)0()(0)0()(
0
=⇒==
==⇒=
==
LwLMivLwiii
LxwMii
wix
Condições de contorno
Quatro condições de contorno para oito constantes!
Deve-se considerar as condições de continuidade em x = L/2

Mecânica dos Sólidos II
Teoria de Vigas (Ex. 2)
Deslocamentos e rotações devem ser contínuos em x = L/2 Condições de continuidade para o esforço cortante e momento fletor são obtidas a partir do equilíbrio de um elemento de volume em torno do ponto x = L/2
)2()2( −+ = LwLw
)2(')2(' −+ = LwLw
x
z P
L/2 L/2
x
z P
L/2 L/2

Mecânica dos Sólidos II
Teoria de Vigas (Ex. 2)
x
z P
P
)2( +LM
)2( +LV
)2( −LM
)2( −LV
EIPLwLwPLVLVLwLwLMLM
−=−⇒=−=⇒=−
−+−+
−+−+
)2(''')2(''')2()2()2('')2(''0)2()2(

Mecânica dos Sólidos II
(i) (ii) (iii) (iv) (v) (vi) (vii) (viii)
Teoria de Vigas (Ex. 2)
00)0( 4 =⇒= cw00)0( 2 =⇒=′′ cw00)( 4 =⇒= dLw00)( 2 =⇒=′′ dLw
2828)2()2( 33
133
1 LcLcLdLdLwLw +=+⇒= −+
32
132
1 4343)2(')2(' cLcdLdLwLw −−=+⇒= −+
2626)2('')2('' 11 LcLdLwLw =⇒= −+
EIPcdEIPLwLw −=−−⇒−=− −+11 66)2(''')2('''

Mecânica dos Sólidos II
Teoria de Vigas (Ex. 2)
11)( dcvii =⇒
33)()( dcvvii =⇒+
Resolvendo para as constantes:
043)()()( 32
1 =+⇒++ cLcvivvii
EIPLcEIPcviviii 16e,12)()( 231 −==⇒+

Mecânica dos Sólidos II
Teoria de Vigas (Ex. 2)
Solução:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
<<⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞⎜
⎝⎛ −−⎟
⎠⎞⎜
⎝⎛ −−
<<⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞⎜
⎝⎛−⎟
⎠⎞⎜
⎝⎛−
=
LxLLxL
LxL
EIPL
LxLx
Lx
EIPL
xw
2,4348
20,43
48)(
33
33
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
<<⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞⎜
⎝⎛ −−
<<⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞⎜
⎝⎛−−
=
LxLLxL
EIPL
LxLx
EIPL
xw
2,4116
20,41
16)('
22
22

Mecânica dos Sólidos II
Teoria de Vigas (Ex. 2)
P
EIPLLw48
)2(3
−=
EIPLw16
)0('2
−=EIPLLw16
)('2
=

Mecânica dos Sólidos II
Resultados Tabelados
( )xLEIPxx −= 36
)(2
δ
EIPL3
3
max =δmaxδ
L
P
maxθ EIPL2
2
max =θ
EIPL2
2
max =θ
EIaLPa
6)3(2
max−=δ
maxδ
L
Pa
maxθEIPa2
2
max =θ
EIMxx2
)(2
=δ
EIML2
2
max =δmaxδ
L
M
maxθ EIML=maxθ

Mecânica dos Sólidos II
Resultados Tabelados
( )LxLxEIqxx 4624
)( 222
−+=δ
EIqL8
4
max =δmaxδ
L
q
maxθ EIqL6
3
max =θ
EIPL16
2
max =θ
maxθ
( )
⎪⎪⎩
⎪⎪⎨
⎧
>⎟⎠⎞⎜
⎝⎛ −+−
<−=
2,)2
(8436
2,4348)(
332
32
LxLxxxLEIP
LxxxLEIP
xδ
EIPL48
3
max =δ
maxδ
2L
P
2L
maxδ
L
q
maxθ ( )3222
224
)( xLxLEIqxx +−=δ
EIqL
3845 4
max =δEIqL24
3
max =θ